电子齿轮比与脉冲当量相关计算
电子齿轮比计算公式

电子齿轮比计算公式电子齿轮比计算公式:已知编码器分辨率131072,脉冲频率200Khz要使转速达到3000r/min求电子齿轮比。
脉冲接口的最大频率是200KHZ,对应最大转速3000转每分,这样的设定能使定位模块发挥伺服的最高速。
代入以下公式:马达转速(3000rpm)/60=脉冲频率(200000Hz)*(分子/分母)/伺服分辨率(131072)约分下来电子齿轮分子4096,电子齿轮分母125。
这样的设置结果4000个脉冲转一圈,200Khz的频率对应3000RPM的转速。
将伺服马达编码器的分辨率设为分子,马达转一圈所需的脉冲数设为分母。
如果再装减速器的话,PLC原来所发脉冲数再乘以减比。
举个例子:伺服马达编码器的分辨率131072,我设计为PLC每发一个脉冲伺服马达转0.5度,那么伺服马达转一圈(360。
)需要720个脉冲。
电子齿轮就设为131072/720化简分数后为8192/45这样PLC 每次发720个脉冲伺服马达转一圈。
如果还想接个减速器,举个例子接个减比为5比1的减速器时,原来电子齿轮所设分数不变,PLC原来所发脉冲数再乘以5 (720*5=3600),即现在伺服马达转一圈PLC发3600个脉冲就可以了。
简单的说,比如说电子齿轮比是1(系统默认),脉冲当量是1mm(就是物体在你发1个脉冲时运行的距离,注意是控制脉冲,就是你PLC发给伺服放大器的脉冲),当你把电子齿轮比改为2时,对应的脉冲当量就变成2mm。
可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
伺服电机旋转时,速度表现重于精度表现时候,希望将电机速度性能完全表现出来;而对于旋转分辨率要求较低的时。
已知编码器分辨率131072脉冲频率200Khz要使转速达到3000r/min求电子齿轮比。
脉冲接口的最大频率是200KHZ,对应最大转速3000转每分,这样的设定能使定位模块发挥伺服的最高速。
电子齿轮比与脉冲当量相关计算

脉冲当量或电子齿轮的调整方法1 什么是脉冲当量或电子齿轮脉冲当量是数控系统控制精度的关键参数,每个脉冲信号机床运动部件的位移量称为脉冲当量,与电子齿轮的关系为:电子齿轮分子/分母比----脉冲当量X 1000,单位:毫米。
例:系统脉冲当量是0.008 毫米,其电子齿轮分子/分母 = 8/1 。
2 什么时候要调整脉冲当量或电子齿轮a机床安装调试或更换系统;b更换电子盘(DOM);c机床运行过程中加工精度不够;d进行参数初始化以后。
3 如何调整调整脉冲当量或电子齿轮电子齿轮比 = 丝杠螺距×1000/(360×细分数/步距角×传动比)。
为便于生产现场调整,可用如下简单方式进行调整:a 先粗设一个电子齿轮比,在系统主界面按参数设置,进入后选择机床参数,将电子齿轮值设为 8:1,按存储(无存储按钮的按 F1)b 在系统主界面下按 F1,进入自动方式,选择F8手动辅助,选择点动,输入点动增量1000c 在机床轨道上做好当前所在位置的标记,然后按下箭头,让机床向远离标志的方向行走一个点动增量;d 测量轨道上的实际行走距离;e 带入下面公式计算分子/分母=8×[测量值]/1×1000将上式化简成最简分数即可。
例:初设电子齿轮比,例:8:1,点动1000毫米,实际走650毫米分子/分母=8×650/1×1000=26/电子齿轮比与脉冲当量相关计算1、什么是机械减速比(m/n)答:机械减速比的定义是减速器输入转速与输出转速的比值,也等于从动轮齿数与主动轮齿数的比值。
在数控机床上为电机轴转速与丝杠转速之比。
2、什么是电子齿轮比答:电子齿轮比就是对伺服接受到上位机的脉冲频率进行放大或者缩小,其中一个参数为分子,一个为分母。
如分子大于分母就是放大,如分子小于分母就是缩小。
例如:上位机输入频率100HZ,电子齿轮比分子设为1,分母设为2,那么伺服实际运行速度按照50HZ的脉冲来进行。
电子齿轮比计算公式
电子齿轮比计算公式已知伺服马达的分辨率是131072 P/R,滚珠丝杠的进给量为Pb =8mm。
(1) 计算反馈脉冲的当量(一个脉冲走多少)?△Lo=(2) 要求指令脉冲当量为0.1um/p ,电子齿轮比应为多少?电子齿轮比=(3) 电机的额定速度为3000rpm,脉冲频率应为多少?Fc=解答:(1) 计算反馈脉冲的当量(一个脉冲走多少)?△Lo= 8mm/131072(2) 要求指令脉冲当量为0.1um/p ,电子齿轮比应为多少?△Lo×电子齿轮比×1000=0.1(3) 电机的额定速度为3000rpm,脉冲频率应为多少?Fc×电子齿轮比=3000/60×131072已知编码器分辨率131072脉冲频率200Khz要使转速达到3000r/min求电子齿轮比。
脉冲接口的最大频率是200KHZ,对应最大转速3000转每分,这样的设定能使定位模块发挥伺服的最高速。
代入以下公式:马达转速(3000rpm) / 60 = 脉冲频率(200000Hz)* (分子/分母)/ 伺服分辨率(131072)约分下来电子齿轮分子4096 ,电子齿轮分母125这样的设置结果4000个脉冲转一圈,200Khz的频率对应3000RPM 的转速将伺服马达编码器的分辨率设为分子,马达转一圈所需的脉冲数设为分母”如果再装减速器的话,PLC原来所发脉冲数再乘以减比。
以三菱MR-J2-S举个例子:伺服马达编码器的分辨率131072,我设计为PLC每发一个脉冲伺服马达转0.5度,那么伺服马达转一圈(360。
)需要720个脉冲,电子齿轮就设为131072 / 720 化简分数后为8192 / 45 这样PLC每次发720个脉冲伺服马达转一圈如果还想接个减速器,举个例子接个减比为5比1的减速器时,原来电子齿轮所设分数不变,PLC原来所发脉冲数再乘以5(720*5=3600),即现在伺服马达转一圈PLC发3600个脉冲就可以了。
伺服驱动的工作原理之电子齿轮比计数举例

伺服驱动的工作原理之电子齿轮比计数举例1)已知条件如下:
伺服电机额定转速为:2000r/min
编码器每圈发出脉冲数为4096p/r
PLC控制器输出的最高脉冲频率为100KHZ
伺服电机输出轴连接减速机构,输入转速:输出转速=4:1
求:PLC控制器输出分辨率(即脉冲当量)为0.1度/每个脉冲的电子齿轮比。
机械结构如下图所示:
2)计算说明:
当电子齿轮比为1:1时,伺服电机经减速机驱动工作台的分辨率为(即当前机构PLC控制器发出一个脉冲时,转盘转动的角度):
(度/每个脉冲)
3)脉冲当量为0.1度/每个脉冲的电子齿轮比:
式中:A为电子齿轮比的分子=1024
B为电子齿轮比的分母=225
4)PLC控制器输出最高脉冲频率为100KHZ时,伺服电机的转速:
伺服电机的转速= ≈ 6667(r/min)>2000(r/min)额定转速
由于PLC输出100KHZ脉冲频率时,伺服电机的转速超过额定转速,所以PLC输出的
脉冲频率必须加以限制为:≈ 30KHZ
式中C为PLC输出的上限脉冲频率为30KHZ。
伺服脉冲计算等距

伺服脉冲计算等距
脉冲当量的计算方法
1、减速比=伺服的转数÷丝杠的转数。
2、工件平移的距离=螺距×丝杠的转数。
3、工件平移的距离=螺距×伺服的转数÷减速比。
4、伺服的转数=伺服输入的驱动脉冲÷伺服每转一周的驱动脉冲数。
5、工件平移的距离÷伺服输入的驱动脉冲=螺距÷(减速比×伺服每转一周的驱动脉冲数。
6、脉冲当量=螺距÷(减速比×伺服每转一周的驱动脉冲数)。
驱动脉冲数是多少
1、驱动脉冲数=伺服转数×伺服每转一周的驱动脉冲数。
2、电子齿轮比=驱动脉冲数÷控制脉冲。
3、驱动脉冲数=控制脉冲×电子齿轮比。
4、伺服每转一周的驱动脉冲数=伺服每转一周控制脉冲数×电子齿轮比。
5、脉冲当量=工件平移的距离÷伺服输入的驱动脉冲=螺距÷(减速比×伺服每转一周控制脉冲数×电子齿轮比)。
伺服电子齿轮比的计算

伺服电子齿轮比的计算
电子齿轮比是伺服中经常要用到的,下面介绍两个伺服电子齿轮设置的例子,供大家参考:
例1:
已知伺服马达的编码器的分辨率是131072 P/R,额定转速为3000r/min,上位机发送脉冲的能力为200Kpulse/s,要想达到额定转速,那么电子齿轮比至少应该设为多少?
计算如下图所示:
根据上图中的算法,可以算出电子齿轮比CMX/CDV的值
例2:
已知伺服马达的分辨率是131072 P/R,滚珠丝杠的进给量为 Pb =8mm。
(1) 计算反馈脉冲的当量(一个脉冲走多少)?
(2) 要求指令脉冲当量为0.1um/p ,电子齿轮比应为多少?
(3) 电机的额定速度为3000rpm,脉冲频率应为多少?
解答:
(1) 计算反馈脉冲的当量(一个脉冲走多少)?
△Lo= 8mm/131072
(2) 要求指令脉冲当量为0.1um/p ,电子齿轮比应为多少?
△Lo×电子齿轮比×1000=0.1
(3) 电机的额定速度为3000rpm,脉冲频率应为多少?
Fc×电子齿轮比=3000/60×131072。
电子齿轮计算公式

电子齿轮计算公式指令脉冲当量(电机转1圈脉冲量)电子齿轮计算公式如下:脉冲量*分子/分母=分辨率。
额定转速(电机转1分钟脉冲量)电子齿轮计算公式如下:脉冲量*分子/分母=电机转速/60秒*分辨率。
指令脉冲当量带减速比(电机转1圈脉冲量)电子齿轮计算公式如下:脉冲量*分子/分母=分辨率*m/n。
M减速比分子;n减速比分母。
额定转速带减速比(电机转1分钟脉冲量)电子齿轮计算公式如下:脉冲量*分子/分母=电机转速/60秒*分辨率*m/n。
M减速比分子;n减速比分母。
例1:1)上位机发出脉冲能力为200Kp/S,200×1000/s,200×1000×60/min;2)电机额定转速为3000R/ min,3000/60s;3)伺服电机编码器分辨率是131072;4)丝杆螺距是10mm;求:1、电机额定转速运行时的电子齿轮比?根据公式:脉冲量*分子/分母=电机转速/60秒*分辨率。
200*1000*分子/分母=3000/60*131072200000*分子/分母=50*131072200000*分子/分母=6553600分子/分母=6553600/200000分子/分母=32.7682、如果电子齿轮比是1,伺服电机的转速?1.如果电子齿轮比是1:12.上位机发出的1个脉冲=编码器输出检测反馈的1个脉冲:3.上位机发出脉冲能力时发出的脉冲频率=200×1000/s;4.伺服电机的转速是=200×1000/s×60/131072= 91.55 r/min3、生产时,设定指令脉冲当量,确定电子齿轮比?1.丝杆螺距是10mm,2.要求上位机每发一个指令脉冲,工件移动0.001mm,即指令脉冲当量为0.001mm,也可以说指令脉冲单位为0.001mm:3.如果伺服转一周,丝杆转一周,减速比是1:14.丝杆转一周,上位机应该发出的指令脉冲为10mm/0.001mm=10000(个);5.伺服转一周,编码器检测反馈脉冲为131072(个);6.根据公式:脉冲量*分子/分母=分辨率。
脉冲当量计算

脉冲当量或细分(电子齿轮比)计算公式
杆导程mm 5Pb =,减速比1/1n =,脉冲当量0025.00=⋅∆,则电子齿轮比CDV
CMX 可以由下式计算得到: 100013107251
12621440025.0Pb n Pt 0S Pt 0CDV CMX =**=**⋅∆=∆*⋅∆= 家里常用步进机器的Z 轴电机驱动器2000Pt =,滚珠螺杆导程mm 5Pb =,
减速比1/1n =,电子齿轮比1CDV
CMX =,则脉冲当量0⋅∆可以由下式计算得到: 151
120000Pb n Pt 0S Pt 0CDV CMX =**⋅∆=**⋅∆=∆*⋅∆= 0025.040010==⋅∆ 3、齿轮齿条结构 家里常用伺服机器的XY 轴电机分辨率131072Pt =,齿轮齿条模数25.1m =,电机轴齿数30Z =,减速比3/1n =,脉冲当量005.00=⋅∆,
则电子齿轮比CDV
CMX 可以由下式计算得到: 100001679551415926.33025.13
1131072005.0Z m n Pt 0S Pt 0CDV CMX =****=π****⋅∆=∆*⋅∆= 家里常用步进机器的XY 轴电机分辨率2000Pt =,齿轮齿条模数25.1m =,
电机轴齿数20Z =,减速比3/1n =,电子齿轮比1CDV
CMX =,则脉冲当量0⋅∆由下式计算得: π
****⋅∆=∆*⋅∆=Z m n Pt 0S Pt 0CDV CMX 08996875.1310001415926.32025.13
1200001=****⋅∆= 50130899687.0100008996875.130==⋅∆。
电子齿轮比与脉冲当量应用换算

电子齿轮比与脉冲当量应用换算一、科普一下这几个参数在定位参数的基本参数里,有四个相关的参数,分别是单位设置、每转脉冲数、每转移动量、单位倍率。
1.单位设置这个参数设置的是定位控制时的指令单位,可以设置为mm、inch、degree、pulse。
如果设置为脉冲单位pulse,那么我们在发定位指令时就是以脉冲为单位了,这时我们就该关心程序里应该发多少脉冲了。
如果设置为毫米mm,那么我们发定位指令时就可以直接让控制对象(比如丝杠)走多少距离,而不需要也不应该操心程序里应该发多少脉冲。
2.每转脉冲数这个参数设置的是电机轴每转所需要的脉冲数。
3.每转移动量这个参数设置的是当伺服电机转动一转时,控制对象(比如丝杠)走多少距离。
举个例子,丝杠的螺距是2mm,伺服电机直接带动丝杠,没有减速机,那么伺服电机转动一转时,丝杠移动量2mm,所以这里应该设置为2000um(前述提到的“单位设置”应设置为mm)4.单位倍率这个参数是当每转移动量超出设置范围时可以作出的调整。
在使用QD75等定位模块时,会发现,每转脉冲数的设置范围是0-65535,每转移动量则与单位有关,若单位是pulse,则范围是1-65535pulse;若单位是mm,这范围是0.1-6553.5um。
显然,第一,如果用的是JE伺服,那么每转脉冲数要设置为131072啊!第二,如果丝杠螺距超过7mm,每转移动量也无法设置。
在QD75里,如果每一脉冲的位移量小于1,则会发生命令频率变化。
较小的设置会增加变化并可能导致机器振动。
如果每一脉冲的位移量变为小于1,则也使用驱动装置的电子齿轮功能并进行设置使每一脉冲的位移量大于等于1。
这段话的意思是AL*AM / AP >=1.二、举个实际例子有一设备伺服轴,用的是MR-JE的马达,JE马达编码器分辨率是131072,丝杠螺距20mm;客户设置的参数是:QD75设置:每转脉冲数设置为1pulse,每转移动量设置为10um,单位倍率为1倍;伺服放大器侧电子齿轮比设置为8192/125;Pb:丝杆导程 n:减速比 Pt:电机编码器分辨率(脉冲/转)三角L0:每脉冲对应的进给量(mm/脉冲)三角S:电机每转对应的进给量(mm/r)CMX / CDV = 三角L0* Pt / 三角S = 三角L0* Pt / (n*Pb)CMX / CDV = (0.01*131072) / 20 = 8192 / 125QD75每转脉冲数设置AP为1pulse,每转移动量设置AL为10um,单位倍率AM为1倍,所以电机转一圈所需脉冲数为:脉冲当量= 导程/(减速比*伺服电机每转一周的定位模块脉冲数。
伺服电机电子齿轮比的算法

伺服电机电子齿轮比的算法一般来说主要由三大因素组成:1、要知道电机转一圈雕刻机的X/Y/Z走多少距离;2、上位机脉冲当量的单位:“毫米/脉冲”还是“脉冲/毫米”;3、伺服电机电子齿轮比的分子与分母。
而分子的基数一般是固定的,只需输入此值就行,而常见的国内分体的伺服电机,它的分子的值与编码器精度有关,精度说法不外乎有两种:一、讲多少线的,比如常见的为2500线,那么它的分子的值为2500的四倍,即10000,如我司分体的就是这样算的。
二、讲多少位,位是指2的幂次方,比如安川的17位、20位就是2的17或20次方。
第1个:要知道电机转一圈雕刻机的X/Y/Z走多少距离1、丝杆机:这个简单,只要知道丝杆的导程(现场一般叫螺距,但书面上来说两者的是不一样的概念。
我们可从它们的相同点来说只要是单头螺纹的丝杆这两者的说法就无区别),然后知道传动比(这又分为减速的传动比还是加速的传动比),然后按以下算法:电机转一圈距离=导程X传动比注:减速传动比一般分子比分母小,如1/3、1/5等等,加速传动比般为分子比分母大,如3/1、5/1等等。
2、齿轮齿条机;按以下算法:电机转一圈距离=齿轮模数X齿轮齿数X3.1415X传动第2个:“毫米/脉冲”与“脉冲/毫米”转换关系如下:“毫米/脉冲”转“脉冲/毫米”:脉冲/毫米=1 /输入的“毫米/脉冲”数值,比如输入值为0.01,那么就等于100脉冲/毫米。
“脉冲/毫米”转“毫米/脉冲”:毫米/脉冲=1 //输入的“脉冲/毫米”数值,比如输入值为100,那么就等于0.01毫米/脉冲第3个:电子齿轮比的分母或脉冲当量(单位为毫米/脉冲)的算法电子齿轮比的分母=电机转一圈距离/脉冲当量从这个算法公式可看出,电子齿轮比的分母或脉冲当量这两者必须有一个是人为任意设置一个数值(只要不超过说明书的许可范围,一般电子齿轮比的分母不超过分子,脉冲当量不超过0.1),另一个才可能求出。
电子齿轮计算公式

指令脉冲当量(电机转1圈脉冲量)电子齿轮计算公式如下:脉冲量*分子/分母=分辨率。
额定转速(电机转1分钟脉冲量)电子齿轮计算公式如下:脉冲量*分子/分母=电机转速/60秒*分辨率。
指令脉冲当量带减速比(电机转1圈脉冲量)电子齿轮计算公式如下:脉冲量*分子/分母=分辨率*m/n。
M减速比分子;n减速比分母。
额定转速带减速比(电机转1分钟脉冲量)电子齿轮计算公式如下:脉冲量*分子/分母=电机转速/60秒*分辨率*m/n。
M减速比分子;n减速比分母。
例1:1)上位机发出脉冲能力为200Kp/S,200×1000/s,200×1000×60/min;2)电机额定转速为3000R/ min,3000/60s;3)伺服电机编码器分辨率是131072;4)丝杆螺距是10mm;求:1、电机额定转速运行时的电子齿轮比?根据公式:脉冲量*分子/分母=电机转速/60秒*分辨率。
200*1000*分子/分母=3000/60*131072200000*分子/分母=50*131072200000*分子/分母=6553600分子/分母=6553600/200000分子/分母=32.7682、如果电子齿轮比是1,伺服电机的转速?1.如果电子齿轮比是1:12.上位机发出的1个脉冲=编码器输出检测反馈的1个脉冲:3.上位机发出脉冲能力时发出的脉冲频率=200×1000/s;4.伺服电机的转速是=200×1000/s×60/131072= 91.55 r/min3、生产时,设定指令脉冲当量,确定电子齿轮比?1.丝杆螺距是10mm,2.要求上位机每发一个指令脉冲,工件移动0.001mm,即指令脉冲当量为0.001mm,也可以说指令脉冲单位为0.001mm:3.如果伺服转一周,丝杆转一周,减速比是1:14.丝杆转一周,上位机应该发出的指令脉冲为10mm/0.001mm=10000(个);5.伺服转一周,编码器检测反馈脉冲为131072(个);6.根据公式:脉冲量*分子/分母=分辨率。
电子齿轮比与脉冲当量相关计算

电子齿轮比与脉冲当量相关计算1. 电子齿轮比(Gear ratio)其中,输出脉冲数是输出轴在一定时间内产生的脉冲数,输入脉冲数是输入轴在同样时间内产生的脉冲数。
2. 脉冲当量(Pulse equivalent)脉冲当量表示电子齿轮系统中每个脉冲对应的位置变化。
对于旋转运动,脉冲当量通常是表示角度变化,单位为度或弧度;对于直线运动,脉冲当量可以表示位移的变化,单位为毫米或英寸等。
脉冲当量和电子齿轮比之间的关系可以通过以下公式计算:脉冲当量=360°/(电子齿轮比*齿轮一圈的脉冲数)其中,齿轮一圈的脉冲数是指齿轮转一圈所产生的脉冲数。
3.相关计算方法为了更好地理解电子齿轮比和脉冲当量的计算方法,我们可以通过以下实例进行说明。
例1:假设一个电子齿轮系统中,输入轴每转一圈产生100个脉冲,输出轴每转一圈产生500个脉冲。
求电子齿轮比和脉冲当量。
解:根据电子齿轮比的定义可得:接下来,根据脉冲当量的计算公式可得:脉冲当量=360°/(电子齿轮比*齿轮一圈的脉冲数)=360°/(5*500)≈0.144°所以,该电子齿轮系统的电子齿轮比为5,脉冲当量为0.144°。
例2:假设一个电子齿轮系统中,输入轴每转一圈产生2000个脉冲,输出轴每转一圈产生6000个脉冲。
求电子齿轮比和脉冲当量。
解:脉冲当量=360°/(电子齿轮比*齿轮一圈的脉冲数)=360°/(3*6000)≈0.02°所以,该电子齿轮系统的电子齿轮比为3,脉冲当量为0.02°。
综上所述,电子齿轮比和脉冲当量是电子齿轮系统中重要的参数,通过计算可以得到它们之间的关系。
在实际应用中,根据具体的输入和输出要求,可以选择合适的电子齿轮比和脉冲当量,以实现精确的位置控制。
脉冲当量与齿轮比
脉冲当量与齿轮比
减速传动比一般就是分子比分母小。
加速传动比一般就是分子比分母大。
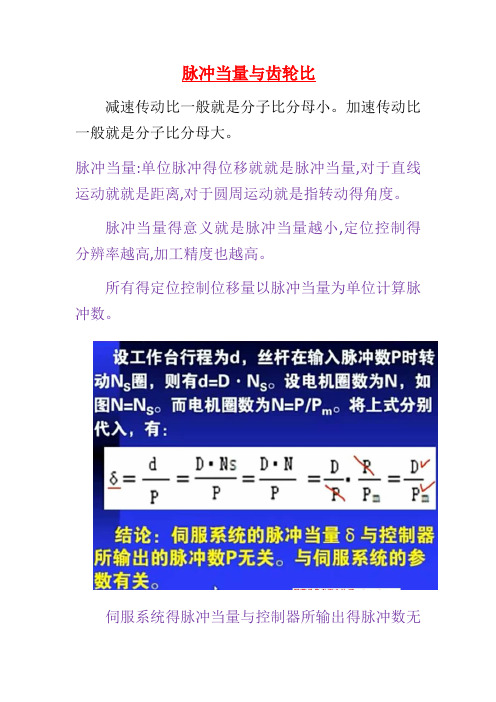
脉冲当量:单位脉冲得位移就就是脉冲当量,对于直线运动就就是距离,对于圆周运动就是指转动得角度。
脉冲当量得意义就是脉冲当量越小,定位控制得分辨率越高,加工精度也越高。
所有得定位控制位移量以脉冲当量为单位计算脉冲数。
伺服系统得脉冲当量与控制器所输出得脉冲数无
关,与伺服系统得参数有关。
脉冲当量计算例1:
丝杆螺距D除编码器分辨率Pm=该伺服系统得脉冲当量
脉冲当量计算例2:
带减速轮得脉冲当量得计算:螺距/(编码器脉冲分辨率乘减速比K)
脉冲当量计算例3:
角度值得脉冲当量:360°/(编码器脉冲分辨率乘减速比K)
脉冲当量计算例4:
脉冲当量=πD(驱动轮得周长)/编码器分辨率
齿轮得直径计算方法:
齿顶圆得直径=(齿数Z+2)*模数
分度圆直径=齿数*模数
齿根圆直径=齿顶圆直径-(4、5X模数) 例如:M4 32齿
齿顶圆得直径:(32+2)*4=136mm
分度圆得直径mZ:32*4=128mm
分度圆得周长:πX128=401、92mm
齿根圆得直径:136-4、5*4=118mm
脉冲当量=πmZ(分度圆直径)/编码器分辨率
步进电机脉冲当量:
圈脉冲P=360°X细分倍数m/电机得步距角
1、
电子齿轮比: 2、
n为转速
现在就是每分钟1465转,要达到每分钟3000转需要设定电子齿轮比。
nN为额定转速,Pm编码器分辨率,f为系统输出频率,电机转速提高后,脉冲当量也会发生变化。
会变大,使精度变小。
电子齿轮比的计算

电子齿轮比计算样例电子齿轮比是伺服中经常要用到的,初学者对这个参数的设置有时会不解,先介绍两个伺服电子齿轮设置方面的2个小例子,供大家参考下。
例子1:已知伺服马达的编码器的分辨率是131072 P/R,额定转速为3000r/min,上位机发送脉冲的能力为200Kpulse/s,要想达到额定转速,那么电子齿轮比至少应该设为多少?计算如下图所示根据上图中的算法,可以算出电子齿轮比CMX/CDV的值例子2:已知伺服马达的分辨率是131072 P/R,滚珠丝杠的进给量为 Pb =8mm。
(1) 计算反馈脉冲的当量(一个脉冲走多少)?△Lo=(2) 要求指令脉冲当量为0.1um/p ,电子齿轮比应为多少?电子齿轮比=(3) 电机的额定速度为3000rpm,脉冲频率应为多少?Fc=解答:(1) 计算反馈脉冲的当量(一个脉冲走多少)?△Lo= 8mm/131072(2) 要求指令脉冲当量为0.1um/p ,电子齿轮比应为多少?△Lo×电子齿轮比×1000=0.1(3) 电机的额定速度为3000rpm,脉冲频率应为多少?Fc×电子齿轮比=3000/60×131072电子齿轮比与脉冲当量相关计算1、什么是机械减速比(m/n)答:机械减速比的定义是减速器输入转速与输出转速的比值,也等于从动轮齿数与主动轮齿数的比值。
在数控机床上为电机轴转速与丝杠转速之比。
2、什么是电子齿轮比答:电子齿轮比就是对伺服接受到上位机的脉冲频率进行放大或者缩小,其中一个参数为分子,一个为分母。
如分子大于分母就是放大,如分子小于分母就是缩小。
例如:上位机输入频率100HZ,电子齿轮比分子设为1,分母设为2,那么伺服实际运行速度按照50HZ的脉冲来进行。
上位机输入频率100HZ,电子齿轮比分子设为2,分母设为1,那么伺服实际运行速度按照200HZ的脉冲来进行3、怎样计算电子齿轮比(B/A)明白几个概念:编码器分辨率(F):伺服电机轴旋转一圈所需脉冲数。
根据电机额定转速计算电机额定转速时电子齿轮比、脉冲当量

根据电机额定转速计算电机额定转速时电子齿轮比、
脉冲当量
先根据电机额定转速,计算电机额定转速时电子齿轮比、脉冲当量:
1)位置环上限频率=周指令脉冲×电机转速;
2)周指令脉冲=位置环上限频率/电机转速
3)电子齿轮比=编码器解析度/周指令脉冲=编码器解析度/(位置环上限频率/电机转速)=(编码器解析度×电机转速)/位置环上限频率
4)脉冲当量=螺距/(减速比×周指令脉冲)=螺距/减速比÷周指令脉冲=螺距/减速比÷编码器解析度/电子齿轮比
5)这时,电机额定速度运行,电子齿轮比的设定值最大,脉冲当量的设定值最大;。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电子齿轮比与脉冲当量相关计算
为方便客户,我们提供vc电子齿轮比计算程序。
请点击下载电子齿轮比计算
1、什么是机械减速比(m/n)
答:机械减速比的定义是减速器输入转速与输出转速的比值,也等于从动轮齿数与主动轮齿数的比值。
在数控机床上为电机轴转速与丝杠转速之比。
2、什么是电子齿轮比
答:电子齿轮比就是对伺服接受到上位机的脉冲频率进行放大或者缩小,其中一个参数为分子,一个为分母。
如分子大于分母就是放大,如分子小于分母就是缩小。
例如:上位机输入频率100HZ,电子齿轮比分子设为1,分母设为2,那么伺服实际运行速度按照50HZ的脉冲来进行。
上位机输入频率100HZ,电子齿轮比分子设为2,分母设为1,那么伺服实际运行速度按照200HZ的脉冲来进行
3、怎样计算电子齿轮比(B/A)
明白几个概念:
编码器分辨率(F):伺服电机轴旋转一圈所需脉冲数。
看伺服电机的铭牌,在对驱动器说明书既可确定编码器的分辨率。
每转脉冲数(f):丝杠转动一圈所需脉冲数。
脉冲当量(p):数控系统(上位机)发出一个脉冲时,丝杠移动的直线距离或旋转轴转动的度数,也是数控系统所能控制的最小距离。
这个值越小,经各种补偿后越容易到更高的加工精度和表面质量。
脉冲当量的设定值决定机床的最大进给速度,当进给速度速度满足要求的情况下,可以设定较小的脉冲当量。
螺距(d):螺纹上相邻两牙对应点之间的轴向距离。
电子齿轮比计算公式如下:
4、步进电机脉冲当量和细分数的关系
在实际调整时可先确定脉冲当量,在根据关系式计算细分数。
或先确定细分数,在计算脉冲当量。
其中:x表示步进驱动器细分数,θ表示步进电机步距角。
5、关于旋转轴
与直线运动轴相比区别在于:旋转轴的螺距值为360,其它计算相同,只需将螺距值换为360。
电子齿轮比与脉冲当量相关计算
1、电机旋转一周的脉冲数到底怎样去计算?”:
1)编码器的分辨率为131072,所以伺服转一周编码器输出131072的检测脉冲;
2)如果丝杠的螺距为5mm,要求输入一个指令脉冲时,工件位移0.001mm,那么要求伺服转一周需要输入的指令脉冲数为
5mm/0.001mm=5000
3)就是说,我们需要伺服转一周时,输给主控器的指令脉冲是5000个,每输入一个指令脉冲工件精确移动0.001mm;
A:就是说,编码器的分辨率是131072,螺距是5mm,要求精度是0.001mm
B:他这是直连的算法
A:应该如何设置?可是他计算的是5000个脉冲。
编码器不是131072个才可以转动一圈的吗?
B:确定值:要求脉冲当量0.001,螺距5,伺服转一周所需脉冲数131072
A:是的,0.001mm的值是如何确定的?我感觉对应不上
B:这是人为确定的,伺服电机转一圈需要上位机发5mm/0.001mm=5000个脉冲,伺服的分辨率是131072这是一个定值。
剩下的就是你调整电子此轮比了。
此时你可以在上位机系统中设定:螺距为5,每转脉冲数为5000,伺服驱动器中设电子此轮比为131072:5000。
如果有减速比的话,电子此轮比设定为131072:5000乘以个减速比。
此时你上位机发5000个脉冲对应外部正好走5MM,正好是5除以5000=0.001。