A320_模拟机训练笔记(2)八个特殊情况记忆项目
A320_模拟机训练笔记要点
房氏秘籍房氏掌门:房大勇弟子:李响,赵晓东2010.10.20大侧风起飞大侧风的概念:有正风和侧风超过20KT。
刹车好到差的情况下,分别为。
15M,12M,10M,8M,2M。
干或湿跑道的情况下,干:起飞14.5,落地16.5 湿:都为14.5原因分析:1侧风使得发动机进气口的空气流动加强,导致飞机进气量不足,过富油,易产生喘振和喘流漩(发动机后部),当地速达到40KTS以上时,前冲力增加了进气量,可以消除这种现象。
2大侧风起飞时,低速时方向舵控制方向的效率很低,速度增加后效应增强,容易保持方向。
3大侧风起飞时,使得下风面机轮(起落架)的压力增加,使飞机的受力点(焦点)发生变化,采取此程序可以改善。
PF PNF---松刹车"松刹车""压力零"---计时N1 50"稳定,一致"--- N1 70"低速40"---设置起飞推力;侧杆向前到底(消除抬头力矩)"MAN FLX,SRS, RAY,A/THR""check"中断中断起飞分为低速和高速,一般以100海里为界限。
动作都是一样的,区别在于,低速时方向比较难控制,有“起飞抑制”,所以原则上100海里以上任何ECAM警告都可以中断,但是要谨慎。
高速时可用停止距离有限和爆胎的危险低速区;咨询条件(EGT超限,震动指数偏高,滑油压力温度异常)和任何ECAM警告都应中断。
操纵特点;第一反应舵面,刹车同时到底,油门慢车。
“中断,报告”反喷无要求低速中断多出现在速度60节。
高速区;任何ECAM都中断,(因为有起飞抑制)PNF;“ECAM告警”一定要拉反喷,但EGT超温或者震动指数异常不应中断,V1-20到V1爆胎考虑继续起飞。
V1:提前5海里报优先于任何口令必须继续起飞,若侧干无效“交操纵”PF PNF---松刹车"松刹车""压力零"---计时N1 50"稳定,一致"---设置起飞推力"MAN FLX,SRS, RAY,A/THR""check"(目视发现急偏)"中断,报告""XX,ZH****,XX原因中断"清除主注意/警告"(始终目视保持方向)---满舵,最大刹车---收油门IDEL---拉出反推(低速可不用)(根据方向是否可控收回) "减速板升起,反推绿,减速""70KT"---反推慢车---将飞机刹停,上停留刹车"停留刹车刹住" (如果有火,向风方向停)"压力好"---开DOME灯---PA广播"乘务组各就各位""ECAM动作"---执行做到ECAM状态“清除ECAM”然后评估决策(漏油,火警冒烟,机体损坏,三种情况需撤离)如需退出跑道检查机轮页面(刹车温度高于800需拖车)PF;“乘务组和旅客回到原位坐好”如要撤离;PF 叫“紧急撤离检查单”PNF边读边做(灭火按钮全部按压,灭火瓶按需,若起落架折断,灭火瓶全部释放)。
A320复训科目
A320复训科目2022年上半年模拟机复训科目说明为复训科目的解读、说明。
模拟机训练的参考。
三、故障处理遵循手册,按照OEB、ECAM动作、QRH、FCOM第三册的顺序完成,机组如确认无OEB项可直接发布ECAM动作等口令。
五、飞机MSN号不同使用程序差别较大,以下程序未能详尽表述所有飞机的程序、动作、要求,某些程序、动作差别较大,运行时请参照具体操作手册!谢意!根据CCAR-121-R4和修订后的《A320飞行训练大纲》的要求,2022年度模拟机的训练将重点突出以下几个方面:1.飞行员资质的要求;2.机长职责,尤其是决策能力、风险防范能力以及管理能力的训练;3.人工操纵能力;4.针对普遍存在的问题和技术薄弱部分;5.新技术的运用等部分科目的说明在出现不正常情况时:任务分担下述的一般任务分担原则适用于所有程序:PF在整个程序中始终是PF。
PF负责:—推力手柄—飞行轨迹和空速的控制—飞机形态(要求改变形态)—导航—通讯PNF负责:—监控和大声读出ECAM和检查单—执行要求的动作或PF要求的动作,(如适用)—操作ENG主电门,IR和带保险盖的电门,要PF证实1、启动超温-人工冷转发动机参见FCOM3.02.70.p251、介绍:启动时如发动机超温不要立即关掉主控开关,要等待ECAM。
只要发动机已开始供油,中断启动后就需要对发动机进行冷转以吹掉残油,对于“超温”导致的中断发动机不会“自动冷转”,因此需要机组进行“人工冷转”。
2、程序:关车后,“发动机方式选择器”向左扳至“CRANK”位,检查APU引气接通(也可以是外部气源或者对侧发动机引气),顶板“人工启动”按钮按下,计时冷转30秒。
结束后“人工启动”按钮关,“发动机方式选择器”扳至“NORMAL”(参考FCOM3.02.70P25)3、再次启动:如果自动启动出现“失速、超温或者引气压力低”等故障,再次启动应尝试“人工启动”,遵循时间间隔“启动2分钟-休息20秒-2分钟-20秒-2分钟-20秒-2分钟-四个周期后休息15分钟”。
A320记忆项目

▪ ▪
建立一个正爬升梯度。
7. 离地时(起飞)的失速警告。一个迎角探头被损坏,在正常法则下假的失速警告会响起,
立即采用以下动作:
◦
推力-TOGA,同时
◦
俯仰姿态-15度
◦
坡度-机翼水平
◦
注:当达到并保持了一个安全的飞行轨迹和速度,如果失速警告继续,将其视为
虚假警告。
8. TCAS(如安装)
◦
活动通告:TRAFFIC信息
◦
起飞时
▪
如V1前-只有在指示V1以下出现显著的空速变化且飞行员决定有足够的
剩余跑道停住飞机时,才能中断起飞。
▪
如V1后
▪
推力手柄-TOGA
▪
到达Vr-抬头
▪
SRS指令-执行
◦
在空中,初始爬升或着陆
▪
推力手柄TOGA位-设定或确认
▪
AP(如接通)-保持
▪
SRS指令-执行
◦
脱离风切变前,不要改变形态(缝翼/襟翼、起落架)
◦
机头下俯操纵-采用(减小迎角)
▪
注:如果没有下俯权限,需要减小推力
◦
使用水平操纵至机翼水平
◦
当改出失速时(不再有失速指示)
▪
推力-按需柔和增加
▪
减速板-检查收回
▪
飞行轨迹-柔和恢复
▪
如果在光洁形态并且低于20000英尺时,选择襟翼1
◦
注:如果存在接地的风险,一旦明显地改出失速(不再有失速指示),就柔和地
5. 刹车失效
◦
若选择了自动刹车
▪
踩刹车脚踏来接管刹车控制
◦
如果无刹车可用:
▪
反推-最大
A320_模拟机训练笔记

房氏秘籍房氏掌门:房大勇弟子:李响,赵晓东2010.10.20大侧风起飞大侧风的概念:有正风和侧风超过20KT。
刹车好到差的情况下,分别为。
15M,12M,10M,8M,2M。
干或湿跑道的情况下,干:起飞14.5,落地16.5 湿:都为14.5原因分析:1侧风使得发动机进气口的空气流动加强,导致飞机进气量不足,过富油,易产生喘振和喘流漩(发动机后部),当地速达到40KTS以上时,前冲力增加了进气量,可以消除这种现象。
2大侧风起飞时,低速时方向舵控制方向的效率很低,速度增加后效应增强,容易保持方向。
3大侧风起飞时,使得下风面机轮(起落架)的压力增加,使飞机的受力点(焦点)发生变化,采取此程序可以改善。
PF PNF---松刹车"松刹车""压力零"---计时N1 50"稳定,一致"--- N1 70"低速40"---设置起飞推力;侧杆向前到底(消除抬头力矩)"MAN FLX,SRS, RAY,A/THR""check"中断中断起飞分为低速和高速,一般以100海里为界限。
动作都是一样的,区别在于,低速时方向比较难控制,有“起飞抑制”,所以原则上100海里以上任何ECAM警告都可以中断,但是要谨慎。
高速时可用停止距离有限和爆胎的危险低速区;咨询条件(EGT超限,震动指数偏高,滑油压力温度异常)和任何ECAM警告都应中断。
操纵特点;第一反应舵面,刹车同时到底,油门慢车。
“中断,报告”反喷无要求低速中断多出现在速度60节。
高速区;任何ECAM都中断,(因为有起飞抑制)PNF;“ECAM告警”一定要拉反喷,但EGT超温或者震动指数异常不应中断,V1-20到V1爆胎考虑继续起飞。
V1:提前5海里报优先于任何口令必须继续起飞,若侧干无效“交操纵”PF PNF---松刹车"松刹车""压力零"---计时N1 50"稳定,一致"---设置起飞推力"MAN FLX,SRS, RAY,A/THR""check"(目视发现急偏)"中断,报告""XX,ZH****,XX原因中断"清除主注意/警告"(始终目视保持方向)---满舵,最大刹车---收油门IDEL---拉出反推(低速可不用)(根据方向是否可控收回) "减速板升起,反推绿,减速""70KT"---反推慢车---将飞机刹停,上停留刹车"停留刹车刹住" (如果有火,向风方向停)"压力好"---开DOME灯---PA广播"乘务组各就各位""ECAM动作"---执行做到ECAM状态“清除ECAM”然后评估决策(漏油,火警冒烟,机体损坏,三种情况需撤离)如需退出跑道检查机轮页面(刹车温度高于800需拖车)PF;“乘务组和旅客回到原位坐好”如要撤离;PF 叫“紧急撤离检查单”PNF边读边做(灭火按钮全部按压,灭火瓶按需,若起落架折断,灭火瓶全部释放)。
A320模拟机训练笔记(3)需要部分记忆

第三部分需要部分记忆的科目:一、G+Y双液压故障二、G+B双液压故障操作技巧:1. 红色的尽快落地,如果最后一套液压失去飞机将失去控制(包括机械备份法则也不可用)。
所以决策上立即飞向最近合适的机场落地,在完成检查单的前提下抓紧时间尽快着陆,不得拖延时间。
2. 强调熟练整个机组的协同配合,检查单和总结的完成方法,如果处于巡航阶段,可以先阅读完ECAM的状态页内容(如FCOM中提到的八个步骤),等决定好着陆机场做进近准备时再逐条完成ECAM的状态页内容,如果在开始ECAM动作时已经决定目的地机场比如飞机处于刚刚起飞或下降进近阶段,则建议在完成ECAM动作时遵循“读且做”的原则,可避免动作程序的重复而浪费宝贵的时间,争取尽快落地。
3. G+B:只有右升降舵工作,副翼不工作,配平有延迟,等待飞行时速度不能太小,以220kts为宜。
进近时断开自动油门,速度200kts重力放轮提前进入直接法则以改善飞行操纵性能,避免操纵的不稳定。
G+Y:安定面配平不工作,安定面失效。
在备份法则中,通过升降舵提供自动配平功能。
在放下起落架时,转换到直接法则,自动配平功能失效。
不过,此时的平均升降舵位置被储存,并且成为侧杆定中位置的参考。
这是程序要求等到飞机在进近速度稳定时才放轮以保证进近和着陆时正确的侧杆定中位置的原因。
如果没有执行这个程序而复飞,拉平和俯仰控制可能比较困难。
由此,应该忽略放轮后PFD(主飞行显示仪)上显示的信息“USE MAN PITCH TRIM”(使用人工俯仰配平)。
4. 航线构成不要小,注意襟翼或缝翼慢的特点,G+B最好在三边放襟翼放轮,以免因状态不稳定错过进近时机,造成复飞。
5. 着陆技巧:注意偏离SOP的喊话,防止避免檫机尾,特别是G+Y,由于襟翼不工作,飞机着陆姿态比较大(10°左右),注意速度不要小,控制仰角,收光油门要谨慎,防止擦机尾(13.5°)。
6. 复飞程序:复飞后返场着陆则保持CONF3形态,起落架不能收上,速度MAX SPD-10建立起落航线着陆。
A320应急处置记忆项目

A320飞机应急处置记忆项目①风切变在每部PFD上均显示“风切变”的小红旗并伴有“风切变”的合成音响,重复三次。
如风切变是由系统探测的或由飞行员观察的,执行下列恢复技术:■起飞时·如 V1 前只有在指示V1以下出现显著的空速变化且飞行员决定有足够的剩余跑道停住飞机时,才能中断起飞。
·如 V1 后-油门杆......TOGA位-到达VR...... 抬轮- SRS指令...... 执行■在空中,起始爬升或着陆-油门杆TOGA位......设定或确认- AP(如接通)...... 保持- SRS指令...... 执行该技术包括侧杆向后拉到底,如需要。
注:1. 如AP接通,当迎角大于迎角保护时,AP断开。
2. 如FD不可用,使用起始俯仰姿态至17.5°并且按需拉杆到底。
如果需要尽量减小高度的损失,可以增加该俯仰姿态。
-脱离风切变前,不要改变构型(缝翼/襟翼、起落架)-严密监控飞行航径和速度。
-脱离风切变后,柔和恢复正常爬升。
②前方风切变信息“前方有风切变”显示在各PFD上。
信息的颜色取决于风切变的严重程序和位置红色的前方有风切变■起飞伴随有音响合成话音,“前方有风切变、前方有风切变”。
●起飞前—延迟起飞或选择最有利的跑道。
●在起飞滑跑期间-中断起飞。
注:在100海里/小时到50英尺期间,预测性风切变告警被抑制。
●升空后-油门杆......TOGA通常假设,未进入风切变,缝翼/襟翼构型可以改变。
-SRS指令......遵循注:若已接通,当迎角大于迎角保护时,自动驾驶仪断开。
■着陆伴随有音响合成话音“复飞,前方有风切变”。
注:若确认没有风切变的危险存在,则可将此警告看作是警示性的。
-油门杆......TOGA-报出......“复飞-襟翼”-襟翼......收起一级—收轮......选择这包括在需要时将杆拉到底。
注:1. 若已接通,当迎角大于迎角保护时,自动驾驶仪断开。
2. 若FD不可用,则可使用高达17.5度的初始俯仰姿态。
A320模拟机训练笔记(3)需要部分记忆
第三部分需要部分记忆的科目:一、G+Y双液压故障二、G+B双液压故障操作技巧:1. 红色的尽快落地,如果最后一套液压失去飞机将失去控制(包括机械备份法则也不可用)。
所以决策上立即飞向最近合适的机场落地,在完成检查单的前提下抓紧时间尽快着陆,不得拖延时间。
2. 强调熟练整个机组的协同配合,检查单和总结的完成方法,如果处于巡航阶段,可以先阅读完ECAM的状态页内容(如FCOM中提到的八个步骤),等决定好着陆机场做进近准备时再逐条完成ECAM的状态页内容,如果在开始ECAM动作时已经决定目的地机场比如飞机处于刚刚起飞或下降进近阶段,则建议在完成ECAM动作时遵循“读且做”的原则,可避免动作程序的重复而浪费宝贵的时间,争取尽快落地。
3. G+B:只有右升降舵工作,副翼不工作,配平有延迟,等待飞行时速度不能太小,以220kts为宜。
进近时断开自动油门,速度200kts重力放轮提前进入直接法则以改善飞行操纵性能,避免操纵的不稳定。
G+Y:安定面配平不工作,安定面失效。
在备份法则中,通过升降舵提供自动配平功能。
在放下起落架时,转换到直接法则,自动配平功能失效。
不过,此时的平均升降舵位置被储存,并且成为侧杆定中位置的参考。
这是程序要求等到飞机在进近速度稳定时才放轮以保证进近和着陆时正确的侧杆定中位置的原因。
如果没有执行这个程序而复飞,拉平和俯仰控制可能比较困难。
由此,应该忽略放轮后PFD(主飞行显示仪)上显示的信息“USE MAN PITCH TRIM”(使用人工俯仰配平)。
4. 航线构成不要小,注意襟翼或缝翼慢的特点,G+B最好在三边放襟翼放轮,以免因状态不稳定错过进近时机,造成复飞。
5. 着陆技巧:注意偏离SOP的喊话,防止避免檫机尾,特别是G+Y,由于襟翼不工作,飞机着陆姿态比较大(10°左右),注意速度不要小,控制仰角,收光油门要谨慎,防止擦机尾(13.5°)。
6. 复飞程序:复飞后返场着陆则保持CONF3形态,起落架不能收上,速度MAX SPD-10建立起落航线着陆。
A320飞动模必看宝典
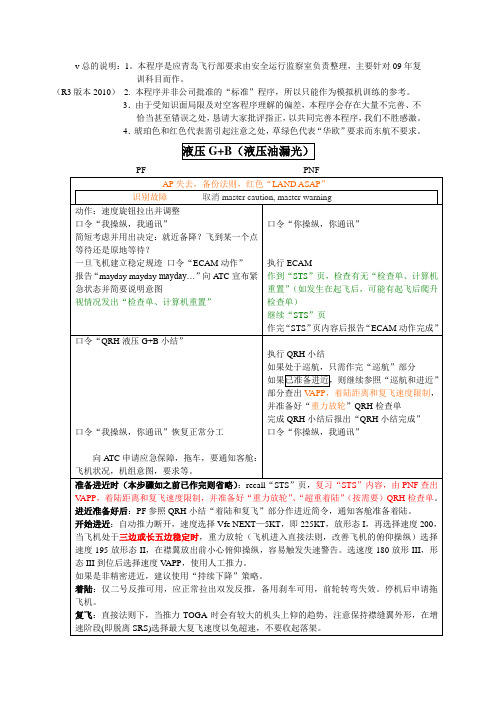
v总的说明:1。
本程序是应青岛飞行部要求由安全运行监察室负责整理,主要针对09年复训科目而作。
(R3版本2010)2. 本程序并非公司批准的“标准”程序,所以只能作为模拟机训练的参考。
3.由于受知识面局限及对空客程序理解的偏差,本程序会存在大量不完善、不恰当甚至错误之处,恳请大家批评指正,以共同完善本程序,我们不胜感激。
4.琥珀色和红色代表需引起注意之处,草绿色代表“华欧”要求而东航不要求。
注意:1、故障发生后,不必匆忙动作,当一旦飞机建立稳定应尽早开始ECAM动作。
2、绿+蓝失效后因缝翼不工作,部分操纵面也不工作,自动推力可能不能很好地保持速度,因此应断开自动推力,对各种重量不同形态下的N1值,可能照QRH“不可靠速度指示”中提供的数据。
3、开始进近后始终使用选择的速度,不要管理。
4、进近时速度200放下起落架,让飞机进入直接法则,自动配平停止,升降舵进入传统模式,与侧杆偏转成比例,改善操纵稳定性(仅一侧升降舵可用)。
5、起落架放下后,因形态一时实际上没有襟缝翼伸展,飞机容易触发失速警告,应马上放出形态二。
但之后不要过早使飞机处于V APP飞行而降低速度余度。
6、作到“STS”页,不必穿插查V APP,着陆距离、复飞速度等,应先完整地读完ECAM。
7、作完ECAM后,再作QRH小结,如在巡航则先只作“巡航”部分即可,进近准备时再能照小结查V APP、着陆距离及复飞速度,然后PF参照“着陆、复飞”部分作进近简令,如果是备降,应在查以上数据前核对MCDU上目的地油量与落地重量。
8、V APP计算可以参照小结,也可以参照ECAM状态页和MCDU性能页查:在MCDU选形态全,查出VLS即Vref,然后按ECAM提示VAPP=Vref+25,即可得出V APP,把它输在MCDU里,再选形态III,顶板GPWS选“着陆襟翼3”。
9、如果故障是由于“低气压”或“过热”引起,在作完ECAM后应监操故障是否消失。
A320模拟机训练笔记(3)需要部分记忆

A320模拟机训练笔记(3)需要部分记忆第三部分需要部分记忆的科目:一、G+Y双液压故障二、G+B双液压故障操作技巧:1. 红色的尽快落地,如果最后一套液压失去飞机将失去控制(包括机械备份法则也不可用)。
所以决策上立即飞向最近合适的机场落地,在完成检查单的前提下抓紧时间尽快着陆,不得拖延时间。
2. 强调熟练整个机组的协同配合,检查单和总结的完成方法,如果处于巡航阶段,可以先阅读完ECAM的状态页内容(如FCOM中提到的八个步骤),等决定好着陆机场做进近准备时再逐条完成ECAM的状态页内容,如果在开始ECAM动作时已经决定目的地机场比如飞机处于刚刚起飞或下降进近阶段,则建议在完成ECAM动作时遵循“读且做”的原则,可避免动作程序的重复而浪费宝贵的时间,争取尽快落地。
3. G+B:只有右升降舵工作,副翼不工作,配平有延迟,等待飞行时速度不能太小,以220kts为宜。
进近时断开自动油门,速度200kts重力放轮提前进入直接法则以改善飞行操纵性能,避免操纵的不稳定。
G+Y:安定面配平不工作,安定面失效。
在备份法则中,通过升降舵提供自动配平功能。
在放下起落架时,转换到直接法则,自动配平功能失效。
不过,此时的平均升降舵位置被储存,并且成为侧杆定中位置的参考。
这是程序要求等到飞机在进近速度稳定时才放轮以保证进近和着陆时正确的侧杆定中位置的原因。
如果没有执行这个程序而复飞,拉平和俯仰控制可能比较困难。
由此,应该忽略放轮后PFD(主飞行显示仪)上显示的信息“USE MAN PITCH TRIM”(使用人工俯仰配平)。
4. 航线构成不要小,注意襟翼或缝翼慢的特点,G+B最好在三边放襟翼放轮,以免因状态不稳定错过进近时机,造成复飞。
5. 着陆技巧:注意偏离SOP的喊话,防止避免檫机尾,特别是G+Y,由于襟翼不工作,飞机着陆姿态比较大(10°左右),注意速度不要小,控制仰角,收光油门要谨慎,防止擦机尾(13.5°)。
A320检查单记忆项目
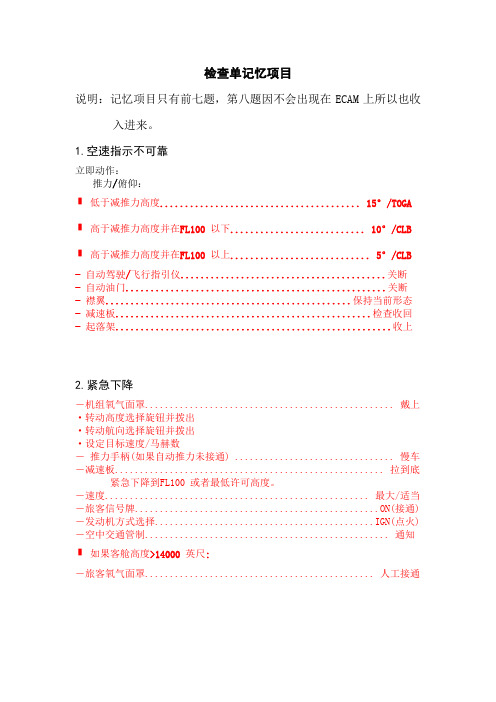
检查单记忆项目说明:记忆项目只有前七题,第八题因不会出现在ECAM上所以也收入进来。
1.空速指示不可靠立即动作:推力/俯仰:低于减推力高度........................................ 15°/TOGA高于减推力高度并在FL100 以下........................... 10°/CLB高于减推力高度并在FL100 以上............................ 5°/CLB−自动驾驶/飞行指引仪.........................................关断−自动油门....................................................关断−襟翼.................................................保持当前形态−减速板...................................................检查收回−起落架.......................................................收上2.紧急下降-机组氧气面罩.................................................. 戴上·转动高度选择旋钮并拨出·转动航向选择旋钮并拨出·设定目标速度/马赫数-推力手柄(如果自动推力未接通) ................................ 慢车-减速板...................................................... 拉到底紧急下降到FL100 或者最低许可高度。
-速度..................................................... 最大/适当-旅客信号牌.................................................ON(接通) -发动机方式选择............................................IGN(点火) -空中交通管制................................................. 通知如果客舱高度>14000 英尺:-旅客氧气面罩.............................................. 人工接通3.风切变起飞时如V1 前只有在指示V1 以下出现显著的空速变化且飞行员决定有足够的剩余跑道停住飞机时,才能中断起飞。
A320机型训练与实验

System Display
第 21 页 共 62 页
南京航空航天大学民航学院实验指导书
1、ECAM 的控制面板
中央操纵台上,在 ECAM 显示的下面,是 ECAM 的控制面板。
① OFF/BRT(断开/亮度)旋钮 控制每部 ECAM 显示组件的接通/断开和亮度(随环境光线变化亮度的自动调整,与人工控制
③ FD(飞行指引仪)按钮 当按下时,可使 FD 杆从相关的主飞行显示器上消失。[若选择了 TRK/FPA(航迹-飞行航迹角) 为 参考则飞行航指引符号消失]。按钮灯熄灭。 再按一次,恢复 FD 指引杆(或飞行航迹指引符号)绿色按钮灯亮。
④ ILS(或着陆系统LS)按钮 当按下时,航向台和下滑道刻度会显示在主飞行显示上。若 ILS 信号有效,会显示偏离符号。 绿色按钮灯亮。
第 17 页 共 62 页
ROSE ILS 方式
南京航空航天大学民航学院实验指导书ROSE VOR 方式
第 18 页 共 62 页
南京航空航天大学民航学院实验指导书
ROSE NAV 方式/ARC 方式
第 19 页 共 62 页
南京航空航天大学民航学院实验指导书
计划方式 在真北方位图上以静态方式显示飞行计划航段。 地图中心为飞行员在他的 MCDU(多功能控制显示组件)上使用滚动键选择的地图参照点。地图
EFIS
备用仪表
EFIS
ECAM
4、中央操纵台
操纵台包括的控制与其他飞机基本相同: - 无线电通讯 - 襟翼,减速板, - 发动机控制… - ECAM 控制面板, - 多功能控制显示器(MCDU),是与飞行制导和飞行管理相联系的用于长时段管理的界面。
第 4 页 共 62 页
南京航空航天大学民航学院实验指导书 第 5 页 共 62 页
2013下半年A320复训科目(学习笔记)

东方航空 A320 2013 年下半年复训(学习笔记)
空客发布
*HOT*掌握飞机性能
未来空中导航系统
掌握寒冷气象条件下的运行方法
掌握减少进近及着陆事故的方法 掌握主最低设备清单和最低设备
清单
A320 Family performance retention and fuel savings
Getting To Grips With the Cost Index
Getting To Grips With fuel Economy
Getting To Grips With RNP AR
Fuel Economy
学员带飞学习手册
掌握客舱安全 逐步掌握数据链
Getting To Grips With Aircraft Noise Getting To Grips With Fatigue and
“启动发动机 1”--- 报出 发动机 1 --- 主电门 ON 双发启动完成后---启动后项目
与上方相同 见下图
关于自动起动 该程序受FADEC全权控制,FADEC控制: - 启动活门 C - 点火器 F - 高压燃油活门 M FADEC:
● By PF changing the level of automation ● By PF reverting to manual flight ● By PNF taking action:
a) Question b) Challenge c) TakRO-NOR-SOP-90 标准喊话
Flight Operations Briefing Notes (FOBNs)
每半年及时更新复训笔记
2
东方航空 A320 2013 年下半年复训(学习笔记)
A320飞机理论知识概要

A319/320机型理论知识概要——深航A320机型理论培训编辑:赖聪监制:空客飞机的八条金科玉律一、驾驶本机型的方法与其他飞机相同二、驾驶、导航、通讯、管理——按此顺序三、总有一个人抬头监管飞机四、交叉检查飞行管理系统的精度五、总是知晓飞机方式信号牌六、当事情不按预期时——接管七、使用正确的自动化级别达成任务八、机组分工并互相支持目录空客飞机的八条金科玉律 (2)第一飞机概述 (5)一、概况二、主要尺寸第二空调/增压/通风 (5)一、空调 (5)1.流量2.冲压空气3.组件控制器4.最佳温度调节5.关组件起飞6.HOT AIR (热空气)按钮开关二、增压 (5)1.概述2.各种极限数字3.安全活门4.自动增压控制方式5.增压系统释压6.提供额外氧气,恢复生理机能高度对应表三、通风 (5)1.通风系统包括2.形态3.鼓风机故障或排风扇故障警告4.烟雾形态第三自动飞行自动指引 (7)第四通讯系统 (11)第五电源系统 (11)第六飞行控制 (13)1.俯仰操纵2.横滚操纵3.减速板控制4.地面扰流板控制5.全伸出---中断起飞阶段6.地面扰流板收回7.慢车逻辑8.方向舵配平9.地面方式10.飞行方式11.拉平方式12.载荷因数限制13.俯仰姿态保护限制范围14.大迎角保护15.高速度保护16.低速稳定性17.横侧操纵与坡度角保护18.横滚直接规则19.侧滑目标20.备用规则21.侧杆优先逻辑22.翼尖刹车23.计算机失效24.A320/319擦机尾仰角25.着陆时擦机翼坡度第七燃油系统 (16)第八液压系统 (17)第九防火 (18)第十防冰和排雨 (19)第十一指示纪录系统 (19)第十二起落架 (20)第十三灯光 (21)第十四导航系统 (22)第十五氧气系统有关数据 (23)第十六气源系统有关数据 (23)第十七水/废物系统 (24)第十八维护系统 (24)第十九舱门 (24)第二十APU (25)第二十一动力装置 (26)历次口试题目集锦(一) (28)运行手册试题范围 (50)第一飞机概述一、概况A320/A319飞机是亚音速中程民用运输机。
A320系列复训题库题库(845道)

A320系列复训题库1、预先准备的有效时间为:在航班起飞前()小时至起飞前()小时完成。
——[单选题]A 48,8B 24,8C 24,12D 48,12正确答案:D2、在从公司始发的航班,应使用本人空勤登机证在签到时间前至少()分钟到达签到处,在一体机上完成签到及酒精测试。
——[单选题]A 3B 5C 10D 15正确答案:B3、执行虹桥出港航班的乘务员应在起飞前()签到。
——[单选题]A 90分钟B 100分钟C 110分钟D 120分钟正确答案:B4、执行浦东出港航班准备会时间()。
——[单选题]A 15 分钟B 20 分钟C 25 分钟D 30 分钟正确答案:B5、执行虹桥出港航班准备会时间()。
——[单选题]A 15 分钟B 20 分钟C 25 分钟D 30 分钟正确答案:B6、A320CEO机型 4 号乘务员座椅失效指定占用旅客座位为()。
——[单选题]A 56AB 56BC 55CD 55H正确答案:C7、A321CEO-200机型 4 号乘务员座椅失效指定占用旅客座位为()。
——[单选题]A 61CB 62BC 63CD 63B正确答案:D8、A321CEO和 A320CEO属于同一种机型,训练差异等级为()级。
——[单选题]A 一B 二C 三D 四正确答案:C9、基地运行时,在飞行值勤期结束后(关车后)30 分钟,至下一个飞行任务或主备份前开始前()分钟为止的时间段。
——[单选题]A 20B 25C 30D 35正确答案:C10、定期复训的有效期指训练到期月(12个月)之前、之中、之后的()个月。
——[单选题]A 1B 2C 3D 6正确答案:A11、乘务教员资格训练适用于至少具有()年乘务长(含)以上岗位工作经历,具有相应的知识经验、训练和经证明的能力,在被提升到此岗位前应接受的训练。
——[单选题]A 2B 3C 4D 5正确答案:A12、参加乘务长升级训练的乘务员必须满足至少具有()年客舱乘务员(含)岗位工作经历的人。
A320_模拟机训练笔记(2)八个特殊情况记忆项目
A320 模拟机训练笔记(二)——A320 非正常/紧急操纵程序(郑重声明:本训练笔记仅供学习参考使用,当笔记内容与《A320 FCOM》有冲突时,应以《A320 FCOM》为依据。
)第一部分特情处置的基本原则一、非正常/应急程序管理顺序:严格执行操纵、导航、通讯、ECAM动作的顺序。
当ECAM显示一个警告或注意信息时,机组首先要确保飞机处于安全的飞行轨迹,对飞机的状况有正确的了解(操纵),有正确的导航(决断和决策),与ATC简明准确的沟通(通讯),最后才开始的ECAM程序处理。
二、关于操纵:1. 飞行操纵法则的确认及特点,(操作飞行员(PF)在侧杆上的输入和飞机反应之间的关系被称为操纵法则,这种关系确定了飞机的操作特性)。
操纵法则有 3 种,根据计算机、相关设备和液压的状态来决定:·正常法则:自动配平;提供5种保护:大迎角保护、载荷因数保护、大俯仰姿态保护、坡度角保护、高速保护。
·备用法则:俯仰与正常法则一样,同时拉平时为直接法则;滚转为直接法则,除载荷因数保护外,大多数的保护都失效。
·直接法则:升降舵的偏转与侧杆偏转成正比,最大偏转量取决于构型和重心;人工控制俯仰配平;副翼和扰流板的偏转与侧杆偏转成正比,但是偏转量变化只与飞机构型有关。
飞机没有任何保护,可以使用人工俯仰配平,但是有超速或失速警告。
·机械备份:(不太可能出现),操作飞行员可以使用方向舵和人工俯仰配平来安全和稳定地控制飞机,同时重新恢复各系统。
2. 人工接管的方法技巧:自动驾驶:若AP不可用,人工接管操纵。
飞行指引:若FD不可用(PFD左上角有红色FD 故障旗),关指引,放小鸟,换成FPV (如不关指引,放小鸟后没有蓝色的目标航迹杆)。
自动油门:若A/THR不可用且推力锁定(ENG THRUST LOCKED),人工移动油门杆离开CLB位即可解锁,此时应该将油门杆移至当前飞行状态所需推力位置。
A320模拟机训练笔记八个特殊情况记忆项目

A320摹拟机训练笔记八个特殊情况记忆项目A320摹拟机训练笔记 - 八个特殊情况记忆项目一、引言A320摹拟机训练中,了解和熟悉特殊情况的处理是飞行员必备的技能之一。
本文将介绍A320摹拟机训练中的八个特殊情况记忆项目,包括飞行中的紧急情况和飞机系统故障的处理方法。
以下是详细的内容描述:二、紧急情况1. 引擎失效当发生引擎失效时,飞行员需要即将采取以下步骤:- 确认失效引擎:通过仪表、声音和振动等方式确认失效引擎。
- 断开自动推力:关闭自动推力系统,避免失效引擎产生的推力对飞机造成不利影响。
- 增加推力:增加剩余引擎的推力以维持飞机的高度和速度。
- 执行单发程序:根据飞机操作手册中的单发程序,完成相应的检查和操作。
2. 失速当飞机发生失速情况时,飞行员需要迅速采取以下措施:- 确认失速:通过仪表和飞机动力学状态等信息确认飞机是否发生失速。
- 推力增加:增加推力以增加升力和恢复飞机的稳定状态。
- 收回襟翼和襟翼:收回襟翼和襟翼以减小阻力,提高飞机的速度和升力。
- 采取姿态调整:通过控制控制杆和脚蹬等飞机控制设备,调整飞机的姿态以恢复平稳飞行。
3. 火警当飞机浮现火警情况时,飞行员需要即将执行以下步骤:- 确认火警:通过火警报警系统和相关仪表确认火警是否发生。
- 切断电源:切断与火警相关的电源,避免火势蔓延。
- 报告地面:与地面空中交通管制通话,向其报告火警情况,并请求适当的指导和支持。
- 执行灭火程序:根据飞机操作手册中的灭火程序,完成相应的操作,以尽快控制火势。
4. 氧气系统故障当飞机氧气系统发生故障时,飞行员需要迅速采取以下措施:- 带上氧气面罩:确保自身和机组成员都佩戴氧气面罩,以保证正常呼吸。
- 检查氧气系统:检查氧气系统的压力和供氧情况,确保正常运作。
- 报告地面:与地面空中交通管制通话,向其报告氧气系统故障,并请求适当的支持和指导。
- 寻觅备用氧气系统:根据飞机操作手册中的指导,寻觅备用氧气系统以维持机组成员的正常呼吸。
A320初始模拟机改装笔记

A320初始模拟机改装笔记1.ND的外圈(亮度调节)的作用:(FCOM 1.31.50 P3)答:控制气象雷达图像和EGPWS地形显示的亮度。
2.ACP3的PA按键与RCDR面板上的GND CTL 有什么区别:(FCOM 3.03.06 P3 / FCOM 1.23.30 P1)答:--PA:使得客舱乘务员的广播能录制在驾驶舱话音记录器上(CVR);注:录音是将音量调到中或上段。
--GND CTL:在地面,按下GND CTL可使CVR人工通电,记录发动机启动前的舱内对话。
3.跳开关的分类,及相关知识:(网上,AMM手册,FCOM 1.24.10 P4a)答:跳开关上的相应数字:代表允许经过的最大电流值;黄色帽:电器紧急情况下,考虑拔出;红色帽:WTB(翼尖刹车),防止复位的跳开关;黑色帽:基本型跳开关,没有与SDAC相连的触电,平时拔出时,不会触发ECAM告诫;绿色帽:有辅助点和SDAC相连,拔出后,由SDAC给ECAM触发告诫,(1min之后会有ECAM显示)。
4.综合备用仪表(ISIS)如何复位?(FCOM 1.34.25 P3 / FCOM 1.34.25 P7)答:按压ATT RST至少2s 可以复位姿态显示。
注:在此程序中飞机必须平飞,复位时间大约10s,屏幕上有:“ATT 10s”显示;相关知识:BUGS 游标选择按钮,可以选4个速度+ 2个高度(V1 Vr V2 绿点TA/TL)5.TCAS的ALL/ABV位分别代表什么?(FCOM 1.34.80 P7)答:扫描范围:ABV:飞机以上7000ft ~ 飞机以下2700ft;N :以上2700ft ~ 以下2700ft;BLW:以上2700ft ~ 以下7000ft。
6.发动机启动好的标志:答:EGT 打到峰值,EPR出现A V AIL,灰色背景消失。
①自动启动,参数监控(FCOM 1.70.80 P5 / FCOM 3.03.08 P1~1)②人工启动,程序(FCOM 3.04.70 P4 / FCOM 1.70.80 P7)7.地面,停留刹车刹上,在ECAM告诫信息出现之前,油门最大可加至什么位置?答:EPR 1.20(1.19),地面机务试车。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A320 模拟机训练笔记(二)——A320 非正常/紧急操纵程序(郑重声明:本训练笔记仅供学习参考使用,当笔记内容与《A320 FCOM》有冲突时,应以《A320 FCOM》为依据。
)第一部分特情处置的基本原则一、非正常/应急程序管理顺序:严格执行操纵、导航、通讯、ECAM动作的顺序。
当ECAM显示一个警告或注意信息时,机组首先要确保飞机处于安全的飞行轨迹,对飞机的状况有正确的了解(操纵),有正确的导航(决断和决策),与ATC简明准确的沟通(通讯),最后才开始的ECAM程序处理。
二、关于操纵:1. 飞行操纵法则的确认及特点,(操作飞行员(PF)在侧杆上的输入和飞机反应之间的关系被称为操纵法则,这种关系确定了飞机的操作特性)。
操纵法则有 3 种,根据计算机、相关设备和液压的状态来决定:·正常法则:自动配平;提供5种保护:大迎角保护、载荷因数保护、大俯仰姿态保护、坡度角保护、高速保护。
·备用法则:俯仰与正常法则一样,同时拉平时为直接法则;滚转为直接法则,除载荷因数保护外,大多数的保护都失效。
·直接法则:升降舵的偏转与侧杆偏转成正比,最大偏转量取决于构型和重心;人工控制俯仰配平;副翼和扰流板的偏转与侧杆偏转成正比,但是偏转量变化只与飞机构型有关。
飞机没有任何保护,可以使用人工俯仰配平,但是有超速或失速警告。
·机械备份:(不太可能出现),操作飞行员可以使用方向舵和人工俯仰配平来安全和稳定地控制飞机,同时重新恢复各系统。
2. 人工接管的方法技巧:自动驾驶:若AP不可用,人工接管操纵。
飞行指引:若FD不可用(PFD左上角有红色FD 故障旗),关指引,放小鸟,换成FPV (如不关指引,放小鸟后没有蓝色的目标航迹杆)。
自动油门:若A/THR不可用且推力锁定(ENG THRUST LOCKED),人工移动油门杆离开CLB位即可解锁,此时应该将油门杆移至当前飞行状态所需推力位置。
恢复人工接管推力。
三、关于导航:根据飞机故障情况、机组人员状况、天气条件、着陆机场条件等进行综合评估,作出合理的决断和决策。
作为一个通用规则:ECAM显示有红色的“LAND ASAP”(尽快着陆)信息时,应尽快在最近的可安全进近和着陆的机场着陆。
有琥珀色的“LAND ASAP”信息时,应考虑情况的严重性并选择合适的机场准备着陆。
一般的故障可以完成ECAM动作到计算机复位,如复位不成功可以应考虑情况的严重性并选择合适的机场准备着陆。
四、关于通讯:1.正常情况下PNF负责所有的ATC通讯、记录、和复述所收到的指令。
两个飞行员都要监控所有的ATC指令。
PF负责和地面机务人员的所有通讯。
2.当飞机发生故障或紧急情况时,原则上应由PF负责与ATC的联系,如受条件限制,可指定PNF或第三人按照PF的意图通讯。
作为建议,当飞机发生故障或紧急情况时,PF 先保持好飞机的状态,由PNF先向ATC通报飞机的情况和机组的意图,收抄ATC的指令;直到PF下达机组重新分工的指令:“我操纵飞机、导航、通信;你完成ECAM动作。
”由PF接管通讯,PNF开始执行ECAM动作。
3.作为一条通用原则:当ECAM显示红色的“LAND ASAP”信息时,机组应该发“MAYDAY”报,当ECAM显示红琥珀色的“LAND ASAP”信息时,机组应该发“PANPAN”报,同时将应答机调至“7700”。
其他情况机组视情而定。
五、关于非正常/应急情况下的机组分工:当出现非正常/应急情况,机组责任区要重新分工:1.PF 负责操纵飞机、导航、通讯:①推力手柄;②飞行轨迹;③速度控制;④飞机形态(形态的改变);⑤导航;⑥通讯;⑦监控确认PNF的动作的正确性。
PNF负责完成ECAM动作:①监控并大声读出ECAM程序和检查单;②视情况执行所需动作或者PF要求的动作;③使用发动机主电门、IR、加了护盖的电门(要求PF共同证实);④监控飞机的状态,如有偏差及时以标准喊话提醒。
2.当需要PF/PNF职责的转换:飞行机组人员必须用如下喊话来转换操作: PF交操作,喊出“(FMA方式牌内容)、通讯频率、减速板状态、你操纵”。
紧急情况时,可以直接喊“你操纵”。
PNF接操纵,喊出“我操纵”。
3.虽然强调机组的明确分工,但应提醒机组有意识的相互配合和支持。
六、关于正确的ECAM认读和执行程序:1. 程序的开始前飞行航径的稳定:确保飞行航径稳定,在下列条件满足之前,不做ECAM动作(通过主警报灯消除音呼报警除外):①若起飞,进近或复飞期间发生故障,飞机至少高于跑道400英尺。
建议400英尺高度是因为这可以很好的协调稳定所需时间和程序启动超时延迟所需时间。
②在一些紧急情况,加入已建立了适当的飞行路径,操纵飞行员可以在此高度前起始动作比如“起飞火警”。
③五边进近中,1000英尺之前可以继续进近同时完成ECAM动作,五边进近1000英尺之后出现特情应复飞,完成ECAM动作后再着陆。
2. 程序的开始前操纵、判断、决断或决策、通讯的完成:①出现故障,PF控制飞机状态,监控好飞行诸元(高度、速度、方向),注意到飞行操纵法则的变化情况、故障系统的降级情况(强调使用正确的自动化级别达成任务,有自动设备尽可能使用):自动驾驶:若AP不可用,人工接管操纵。
飞行指引:若FD不可用(PFD左上角有红色FD 故障旗),关指引,放小鸟,换成FPV (如不关指引,放小鸟后没有蓝色的目标航迹杆)。
自动油门:若A/THR不可用且推力锁定(ENG THRUST LOCKED),人工移动油门杆到当前所需位置即可解锁,人工接管油门。
PNF复位主警告/主注意(只要灯亮铃响就按压复位而不应该有延迟)并喊出“主警告(主注意)”“故障标题”。
②在进行ECAM动作之前一定要对故障进行综合判断,同时核实E/WD、SD、顶板的系统故障灯、PFD和ND这四个地方的显示。
注意到系统显示上使用的感应器和触发ECAM故障信息的感应器是不同的。
③根据故障,机组进行决断、决策,决定返场或继续执行航班,共同制定领航计划。
④由PNF报告ATC有关特情和飞行机组意图,抄收ATC指令。
根据ATC指令调整飞行状态。
3.执行ECAM动作:状态稳定后,PF 口令:“我操纵、通讯、导航;你完成ECAM 动作”。
PNF 开始执行ECAM 程序,直到状态页面出现后,宣布“状态页面”,PF口令“停止ECAM动作”,然后:① PF喊出“正常检查单”:按需完成正常的程序动作及相应的检查单(如“起飞后爬升检查单”“下降进近检查单”等)。
应注意到修正海压的转换,10000英尺动作,考虑地形雷达按钮(如紧急下降)等。
② PF喊出“OEB”:核实OEB(操作工程通告),检查有无OEB动作。
③ PF喊出“计算机复位”:查看QRH2.34有关计算机复位的内容,视情复位计算机。
如果前面通过按压顶板上的按钮断开再接通系统,也算是计算机复位。
④复位成功,可继续执行航班;复位不成功,机组决策是否改航。
⑤通知乘务和签派:若决定返场或备降,PNF通过呼叫前舱通知乘务长飞机出现故障,现在返航或备降,大约需要多少时间落地,是否需要做紧急撤离准备(切记一个完整的客舱紧急撤离准备大约需要12分钟左右)等。
通过ATC或签派频率通知公司签派,以获取地面支援和协助。
⑥ PF然后下口令“继续ECAM动作”,PNF执行并完成状态页面,状态页面完成,PNF 请示清除后宣布“ECAM动作完成”。
⑦视情完成QRH相应的检查单和查阅FCOM3上相应内容。
注意:利用ECAM程序,状态信息及PFD/ND的检查来处理故障就足够了,不过,执行ECAM动作之前,应该在系统显示中确认故障。
在ECAM动作完成后并且核实了ECAM状态后,若时间允许,机组可参阅FCOM3和FCOM1等内容以获取补充信息。
但在紧急或关键的情况下不应该为查阅FCOM而延长飞行,影响尽快落地。
4. ECAM动作的方法:①在做动作或者选择之前,为防止飞行机组无意地执行一些不可逆转的动作,操作飞行员和不操作飞行员必须认真落实交叉检查一些选择器或按钮(包括发动机主开关,防火按钮,惯性基准系统,综合驱动发电机以及,作为一条通用规则,所有加护盖的开关)。
为了避免找错电门,空客公司顶板都是分类设计的。
当ECAM要求操作顶板按钮或者开关时,可以参阅每个面板一侧的白色系统名称来确定正确的系统面板。
在执行任何动作之前,不操作飞行员应该记住这个顺序;“系统,然后程序/选择器,然后动作”(比如,“空气,交输引气,关闭”)。
这个方法以及在行动之前喊出,即将做出的选择可以让不操作飞行员一直通知操作飞行员程序的进展情况。
②如果系统故障,系统按钮(位于顶板上)上的相关故障(FAULT)灯将以琥珀色显示,这可以帮助正确地确认。
在选择系统开关或按钮时,不操作飞行员应该检查SD以确认所选择的动作已生效(比如,关闭交输引气活门会改变SD上出现的指示)。
③操作飞行员可以在任何时候喊出“停止ECAM”,如果必须执行其它的特定动作(正常检查单,或者执行一次计算机复位)。
当动作完成时,操作飞行员必须喊出:“继续ECAM”。
六、关于非正常/紧急情况下的进近准备和简令:1.进近准备:非正常/紧急情况下,PF通常在整个飞行中保持操作飞行员的工作,除非机长决定接管操作。
此时的进近准备建议委托PNF完成,再由PF交操纵以完成进近简令。
这样的分工可以加强进近准备的交叉检查和核实。
2.进近简令:①进近简令应首先核实状态页面,证实故障造成的不工作系统的影响以及由此带来的对进近着陆的特殊要求。
②然后是正常的MCDU帽子各个页面程序,确保正常的设备和程序不出差错,防止因特情影响正常进近程序。
③非计划改航落地强调重点注意有无超重,否则视情完成“超重着陆检查单”或耗油后落地,需要地面支援和协助时及时通报ATC(如拖车、救护车、救火车等)。
④按照进近图,强调复飞的动作协调及复飞后的线路以及扇区安全高度。
⑤强调偏差的提醒,机组之间的相互支持配合,特别如自动报话不工作、自动刹车不工作、反喷不工作、EGPWS不工作,复飞形态的确认等等。
七、关于非正常/紧急情况下的进近着陆:1. 状态页的自动跳出:缝翼放下时,SD自动显示状态,除非页面为空。
应该仔细地检查、核实STS(状态)页面,确认有无未完成内容和新增内容,并且按要求执行未完成或新增的程序,然后清除。
2. 重新调整进近策略:对于故障带来的新的特点,在进近中注意有针对性的调整,例如针对襟/缝翼慢的情况,那么就提前建立形态。
针对起落架不能回收的情况,必须断定天气符合标准且天气稳定才放轮,因为万一复飞改航燃油可能不够等等。
3. 标准喊话:最后进近着陆中PNF应报出以下飞行状态,并在着陆之前报高度。
①当速度小于Vapp-5或大于目标速度+10时,报“速度”。