0交通灯的模拟控制
利用单片机实现对交通灯的模拟控制

利用单片机实现对交通灯的模拟控制作者:刘静来源:《计算机光盘软件与应用》2013年第08期摘要:本文主要介绍了利用单片机LY-51SV2.3开发板实现对交通灯的模拟控制,通过本实例的设计与制作,使我们对单片机的学习有一个更深入的理解与掌握,并加强C语言的编程能力。
希望通过本实例的学习,对以后进一步学习单片机提供一个良好的基础。
关键词:单片机;交通灯;C语言中图分类号:TP319目前,交通信号灯可以说随处可见,只要有交通的地方的就有交通控制灯,我们在街道随处可以见到红、黄、绿三色信号灯,交通灯在生活中是至关重要的,没有交通灯,交通就会陷入瘫痪,人们的出行就会受到影响,所以本文利用LY-51SV2.3开发板,通过C语言编程模拟实现对交通灯的简单控制,使初学者对LY-51SV2.3开发板有一个基本的了解与掌握,对C语言编程有个基本的掌握,为以后的进一步学习提供基础。
1设计要求双干线十字路口交通灯控制规则如下:A:放行线:绿灯亮放行25秒,黄灯亮警告5秒,然后红灯禁行;B:禁行线:红灯亮30秒禁止通行,绿灯亮放行。
设计能控制东、南、西、北四个路口的红、黄、绿信号灯正常工作;当东西方向放行时,南北方向禁行,反之亦然;利用P1口控制LED灯实现;用数码管显示时间2接线根据设计要求,连接开发板线路端口。
3函数与端口说明主函数voidmain(void)定时器中断程序(LED显示)voidtimer0()interrupt1共阴数码管显示函数voidDisplay(unsignedcharFirstBit,unsignedcharNum);延时函数voidDelayMs(unsignedchart);注:LED显示采用多分支选择语句sbitRED_A=P1^0;//南北sbitYELLOW_A=P1^1;sbitGREEN_A=P1^2;sbitRED_B=P1^3;//东西sbitYELLOW_B=P1^4;sbitGREEN_B=P1^5;unsignedchartime_A,time_B;unsignedcharoperation_type=1;unsignedcharms;#defineDataPortP0//定义数据端口程序中遇到DataPort则用P0替换sbitLATCH1=P2^2;//定义锁存使能端口段锁存sbitLATCH2=P2^3;//位锁存unsignedcharcodedofly_DuanMa[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};unsignedcharcodedofly_WeiMa[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7funsignedcharTempData[8];//存储显示值的全局变量voidDelayUs2x(unsignedchart);voidDelayMs(unsignedchart);voidDisplay(unsignedcharFirstBit,unsignedcharNum);4实现过程voidmain(void){ TMOD=0x01; //使用模式1,16位定时器TH0=(65536-50000)/256; //给定初值TL0=(65536-50000)%256;EA=1; ET0=1; TR0=1;time_A=25;time_B=30;while(1)//主循环{TempData[0]=dofly_DuanMa[time_A/10];TempData[1]=dofly_DuanMa[time_A%10];TempData[2]=dofly_DuanMa[time_B%10];TempData[3]=dofly_DuanMa[time_B%10];Display(0,4); }}voidDelayUs2x(unsignedchart){while(--t);}voidDelayMs(unsignedchart){while(t--){DelayUs2x(245); DelayUs2x(245);}} voidDisplay(unsignedcharFirstBit,unsignedcharNum) {unsignedchari; for(i=0;i{DataPort=0;//清空数据,防止有交替重影LATCH1=1;LATCH1=0;DataPort=dofly_WeiMa[i+FirstBit];//取位码LATCH2=1;LATCH2=0;DataPort=TempData[i];//取显示数据,段码LATCH1=1;LATCH1=0;DelayMs(2);//扫描间隙延时,时间太长会闪烁,太短会造成重影}} voidtimer0()interrupt1{ TH0=(65536-50000)/256;TL0=(65536-50000)%256;ms++; if(ms==20){ms=0;time_A--; time_B--;}switch(operation_type){ case1:RED_A=1;YELLOW_A=1;GREEN_A=0; //南北绿灯 25S RED_B=0;YELLOW_B=1;GREEN_B=1; //东西红灯 30Sif(time_A!=0)return; //25S时间到time_A=5;operation_type=2; break;case2:YELLOW_A=0;GREEN_A=1; //南北黄灯5Sif(time_A!=0)return; //5S时间到time_A=30;time_B=25; //南北30S,东西25Soperation_type=3; break;case3:RED_A=0;YELLOW_A=1;GREEN_A=1; //南北红灯30S RED_B=1;YELLOW_B=1;GREEN_B=0; //东西绿灯25Sif(time_B!=0)return; //25S时间到time_B=5; //5Soperation_type=4;break;case4:YELLOW_B=0;GREEN_B=1; //东西黄灯5Sif(time_B!=0)return; //5S时间到time_A=25;time_B=30; //东西25S,南北30Soperation_type=1; break; }5总结到此,我们通过对设计要求的理解,对开发板的线路端口的正确连接以及C语言编程,我们对整个实例就完成了,虽然本实例有很多不完善的地方,但是希望通过本实例的设计与制作,使我们对使用单片机开发模拟控制交通灯有个简单的理解与掌握,也希望通过进一步的学习,能设计制作出更优秀的作品来。
单片机课程报告设计--交通信号灯模拟控制系统设计

单片机课程报告设计题目:交通信号灯模拟控制系统设计专业:电子信息科学与技术班级:学号:姓名:指导老师:年月日※※※※※※前言※※※※※※本课程设计的目的和意义本课程设计是在学完单片机原理及课程之后综合利用所学单片机知识完成一个单片机应用系统设计并在实验室实现。
该课程设计的主要任务是通过解决一、两个实际问题,巩固和加深“单片机原理与应用”课程中所学的理论知识和实验能力,基本掌握单片机应用电路的一般设计方法,提高电子电路的设计和实验能力,加深对单片机软硬知识的理解,获得初步的应用经验,为以后从事生产和科研工作打下一定的基础。
*******目录*******一、设计要求二、设计内容三、交通信号灯模拟控制系统设计程序流程图四、交通信号灯模拟控制系统原理图五、交通信号灯模拟控制系统主程序六、运行步骤七、检测与调试八、课程设计体会九、参考文献十、说明一、设计要求:交通信号灯模拟控制系统设计利用单片机的定时器定时,令十字路口的红绿灯交替点亮和熄灭,并且用LED数码管显示时间。
用8051做输出口,控制十二个发光二极管燃灭,模拟交通灯管理。
二、设计内容:因为本课程设计是交通灯的控制设计,所以要了解实际交通灯的变化情况和规律。
假设一个十字路口为东西南北走向。
初始状态0为东西红灯,南北红灯。
然后转状态1东西红灯,南北绿灯通车,。
过一段时间转状态2南北绿灯灭,黄灯闪烁几次,东西仍然红灯。
再转状态3,东西绿灯通车,南北红灯。
过一段时间转状态4,东西绿灯灭,闪几次黄灯,南北仍然红灯。
最后循环至状态1。
注意:.双色LED是由一个红色LED管芯和一个绿色LED管芯封装在一起,公用负端。
当红色正端加高电平,绿色正端加低电平时,红灯亮;红色正端加低电平,绿色正端加高电平时,绿灯亮;两端都加高电平时,黄灯亮。
三、交通信号灯模拟控制系统设计程序流程图四、交通信号灯模拟控制系统主程序ORG 0000HSJMP A3ORG 0030HA3: MOV SP,#60H ;设栈指针初值MOV A, #24HMOV P1, ASETB P3.2CLR P3.3CLR P3.4SETB P3.5 ;全部红灯亮MOV R4,#00H ;显示0秒MOV R7,#00H ;显示0秒MOV R2,#03HLCALL XI ;调用子程序A2 : MOV A,#0CHMOV P1,ASETB P3.2SETB P3.3CLR P3.4CLR P3.5 ;东西红灯,南北绿灯MOV R4,#14H ; 显示20秒LOOP2 : MOV R2,#03HLCALL XIDJNZ R4,LOOP2 ;判断20秒显示时间到否MOV R2,#03HLCALL XILOOP8: MOV R2,#03H ;南北黄灯闪3次LCALL XIMOV R4,#05H ;设南北黄灯亮长显示5秒SETB P3.2CLR P3.3A1: MOV A,#14HMOV P1 ,ASETB P3.4CLR P3.5 ;东西红灯,南北黄灯MOV R2,#01H ;定时LCALL DELAY ;调用延时子程序MOV A ,#04HMOV P1 ,ACLR P3.4CLR P3.5 ;东西红灯,南北不亮即意思要南北黄灯闪烁MOV R2 ,#01H ;定时LCALL DELAYDJNZ R4,LOOP8 ;判断南北黄灯闪烁,显示5秒到否?MOV A, #61HMOV P1,ACLR P3.2CLR P3.3CLR P3.4SETB P3.5 ;东西绿灯,南北红灯MOV R4,#14H ;显示20秒LOOP3:MOV R2,#03HLCALL XIDJNZ R4,LOOP3 ;判断20秒显示时间到否MOV R7,#05H ;设东西黄灯亮长显示5秒SETB P3.5A0: MOV A,#0A2HMOV P1,ACLR P3.2CLR P3.3CLR P3.4 ;东西黄灯,南北红灯MOV R2,#01H ;定时LCALL DELAYMOV A,#20H ;MOV P1,ACLR P3.2CLR P3.3CLR P3.4 ;南北红灯,东西不亮即意思要东西黄灯闪烁MOV R2,#01H ;定时LCALL DELAYDJNZ R7,A0 ;判断东西黄灯闪烁,显示5秒到否?LJMP A2 ;循环回状态1,即东西红灯,南北黄灯DELAY: PUSH 2PUSH 1PUSH 0 ;进栈DELAY1: MOV 1,#00HDELAY2:MOV 0,#0B2HDJNZ 0,$ ;判断是否运行完0B2HDJNZ 1,DELAY2DJNZ 2,DELAY1POP 0POP 1POP 2 ;出栈DJNZ R2 ,DELAY ;判断R2是否运行完RET ;返回主程序XI: MOV A,R4MOV B,#10DIV ABMOV R6,AMOV DPTR,#TABMOV A,BMOVC A,@A+DPTRMOV SBUF,AMOV R7,#0FHH55S: DJNZ R7,H55SMOV A,R6MOVC A,@A+DPTRMOV SBUF,AMOV R7,#0FHH55S1: DJNZ R7,H55S1LCALL DELAYRETTAB:DB 0fch,60h,0dah,0f2h,66h,0b6h,0beh,0e0hDB 0feh,0f6h,0eeh,3eh,9ch,7ah,9eh,8ehEND五、交通信号灯模拟控制系统原理图设计的连线图提示:(1) 完整的DVCC实验箱面板(2)硬件电路连接说明六、运行步骤:①8051 P1.0—P1.7、P3.2—P3.5依次接发光二极管L1—L12。
交通信号灯模拟(PV操作)

目录第一章课程设计目的和要求 01.1 课程设计目的 01.2 课程设计要求 (1)第二章课程设计任务内容 02.1课程设计任务 02.2 课程设计原理 02.3 课程设计内容 (4)第三章详细设计说明 (5)3.1 模块描述 (5)3.2 性能描述 (5)3.3 输入项 (6)3.4 输出项 (6)3.5 数据结构 (7)3.6 算法介绍 (7)3.7 流程图 (8)3.7.1 主程序流程图 (8)3.7.2 算法流程图 (9)3.8 接口描述 (11)3.9 限制条件 (13)第四章件使用说明 (13)4.1 系统开发与运行环境 (13)4.2系统的运行说明 (13)4.3 运行结果 (13)第五章课程设计心得体会 (19)附录1:参考文献 (20)附录2:程序清单 (21)交通信号灯模拟第一章课程设计目的和要求1.1 课程设计目的根据学院课程安排,在大三的第一个学期我们开设了操作系统这门课程,操作系统可以说是是计算机系统的核心和灵魂,是计算机系统必不可少的组成部分。
通过学习,对于操作系统的运行方式以及设计理念有了较清楚的认识。
要想真正学好并理解操作系统这门课程,不但需要理解操作系统的概念和原理,还需要加强操作系统实验,上机进行编程实践,现在一学期的课程已经结束,本次课程设计在同学们掌握理解该课程的基础上,对操作系统内部的一些具体项目的实现方法进行实战演练,通过实践将知识彻底掌握。
操作系统课程设计是该课程重要的实践教学环节。
通过这次课程设计,一方面可以使学生更透彻地理解操作系统的基本概念和原理,摆脱抽象的理解,从实践中将理论具体化;另一方面,通过课程设计还可以加强学生的实践能力,培养学生独立分析问题、解决问题、应用知识的能力和创新精神。
本次课程设计的题目为交通信号灯模拟,在熟练掌握课本所讲解的计算机的P 操作和V操作的原理的基础上,利用C++程序设计语言在windows操作系统下模拟实现交通信号灯的模拟,一方面加深对原理的理解,另一方面提高根据已有原理通过编程解决实际问题的能力,为进行系统软件开发和针对实际问题提出高效的软件解决方案打下基础。
十字路口交通灯模拟红绿灯控制电路课程设计

2016 ~ 2017 学年第一学期《数字电子技术》课程设计报告题目:专业:班级:姓名:指导教师:**电气工程学院2016年月日1、任务书目录摘要 (3)第一章设计任务与要求 (4)第二章基本方案 (4)2. 1方案一 (4)2. 2方案二 (4)2. 3方案三 (4)第三章方案选择 (4)第四章电路原理图 (4)4. 1计数模块电路 (4)4. 2 红灯闪烁电路 (5)4. 3数码管显示电路 (5)4. 4 194模块 (8)4. 5主体电路图 (10)4. 6元器件清单 (10)第五章电路调试 (11)5. 1 Protues软件仿真 (11)5. 2硬件电路调试 (11)5.2.1 测试电路 (12)5.2.2硬件测试出现问题及解决方案 (14)第六章电路测试后总结 (15)6. 1设计小结 (15)6. 2设计缺点 (15)6. 3系统性能分析 (15)参考文献 (15)摘要中文摘要:在城市交通道路中,由两条道路的汇合点所形成的十字交叉路口很多。
为了确保交通安全及车辆的迅速、有效的通行,在交叉路口的每个入口处需要设置红、绿、黄三色信号灯。
对于机动车来说,红灯亮时,禁止通行;绿灯亮时,则允许通行;黄灯亮时,则提示司机将行使中的车辆减速并准备停下来。
十字路口交通灯的控制逻辑采用数字电路很容易实现。
根据交通灯控制的点功能不同,有简单的红、黄、绿三色交通灯控制电路。
有带时间显示的控制电路;有主干道与支干道通行时间不同的控制电路;有带时间转换功能的交通灯控制电路;有手动控制电路。
一般交通灯控制电路主要由定时器、控制器、译码和显示几个部分组成。
关键词:交通灯定时器控制器一、设计任务与要求1.按照红-绿-黄顺序轮流点亮2.东西向绿灯与南北向红灯不同时亮,南北向绿灯与东西向红灯不同时亮3.东西向黄灯点亮时南北向红灯闪烁,南北向黄灯点亮时东西向红灯闪烁4.当绿灯亮时数显开始倒计时二、基本方案通过74192进行计数,D触发器跳变使下一组74192开始计数,也可通过开关来控制D触发器,在此基础上用移位寄存器替代D触发器来控制74192。
三菱PLC-用经验设计法实现十字路口交通灯控制的模拟

实训一十字路口交通灯控制
在十字路口交通灯单元完成本实验
一、实验目的
熟练使用基本指令,根据控制要求,掌握PLC的编程方法和程序调试方法,使用PLC解决一个实际问题。
二、实验说明
信号灯受一个启动开关控制,当启动开关接通时,信号灯系统开始工作,且先南北红灯亮,东西绿灯亮。
当启动开关断开时,所有信号灯都熄灭。
工作时序:南北红灯亮维持25秒,在南北红灯亮的同时东西绿灯也亮,并维持20秒;到20秒时,东西绿灯闪亮,闪亮3秒后熄灭。
在东西绿灯熄灭时,东西黄灯亮,并维持2秒。
到2秒时,东西黄灯熄灭,东西红灯亮,同时,南北红灯熄灭,绿灯亮,东西红灯亮维持30秒。
南北绿灯亮维持20秒,然后闪亮3秒后熄灭。
同时南北黄灯亮,维持2秒后熄灭,这时南北红灯亮,东西绿灯亮。
周而复始。
三、实验面板图
四、实训步骤
1.I/O分配:
输入地址 输出地址 启动SD X0 南北方向绿灯 Y0
南北方向黄灯 Y1
南北方向红灯 Y2
东西方向绿灯 Y3
东西方向黄灯 Y4
东西方向红灯 Y5
2. 实训步骤:
⑴按照上述I/O分配设计程序梯形图;
⑵连接模拟电路,调试程序;
⑶将调试运行正常的梯形图写入实验报告。
(实验报告包括:1、实验目的2、控制要求3、I/O口分配4、梯形图5、实验结果)。
实训指导:
1.时序图:
2.参考梯形图(见下):。
模拟交通灯控制实验PPT课件

-
1
实验目的
在以往单元电路的基础上综合运用 8255A可编程并行接口芯片,8254 定时/计数器芯片,中断系统。 学习实际计算机控制系统设计方法。
-
2
实验原理
在本次实验中,我们利用发光二极管 模拟交通灯,实验箱上所用的是双色 二极管,红、绿两线均接高电平时发 黄光,实验中的发光二极管是利用 8255驱动,工作于方式1,利用8253 作为0.5S脉冲发生器。
-
11
L1 : JMP L1
L2 : MOV SI,0
INT7: MOV AX,DATA
MOV DS,AX
MOV DX,288H
MOV AL,LED1[SI]
OUT DX,AL
INC SI
CMP AL,0FFH
JZ L2
MOV AL,20H
OUT 20H,AL
MOV AH,1
INT 16H
JZ NEXT
IN AL,21H
OR AL,80H
OUT 21H,AL
STI
MOV AH,4CH
INT 21H
NEXT:IRET
CODE ENDS
END START
-
12
④ 26S~30S取南北红灯亮、东西黄灯闪的数(82H,80H) 每隔0.5S取一个数,也就是1S黄灯闪一次,要取10个此 数字。
⑤ 转①重复
-
6
实验步骤
1、输入源程序,并检查无误后,保存到E:\。 2、汇编,连接后形成EXE的可执行文件。 3、按图一所示的实验接线图连接实验线路。
检查无误后打开实验箱的电源。 4、执行可执行文件,观察六个发光二极管的
① 前10S中取 南北绿、东西红的数(24H),那么要取 10÷0.5=20个此数字。
plc红绿灯实验报告
plc红绿灯实验报告篇一:PLC交通灯实验报告十字路口交通灯控制的模拟实验报告一、实验目的1、熟练使用各基本指令,定时器,计数器,内部指令等。
2、根据控制要求,掌握PLC的编程方法和程序调试方法。
3、掌握交通灯的实验设计与三菱PLC的连线方法。
二、实验要求交通灯模拟控制实验区中,下框中的南北红、黄、绿灯R、Y、G分别接主机的输出点Y2、Y1、Y0,东西红、黄、绿灯R、Y、G分别接主机的输出点Y5、Y4、Y3,模拟南北向行驶车的灯接主机的输(本文来自:小草范文网:plc红绿灯实验报告)出点Y6,模拟东西向行驶车的灯接主机的输出点Y7;下框中的SD接主机的输入端X0。
上框中的东西南北三组红绿黄三色发光二极管模拟十字路口的交通灯。
信号灯受一个启动开关控制,当启动开关接通时,信号灯系统开始空座,且先南北红灯亮,东西绿灯亮。
当启动开关断开时,所有信号灯都熄灭。
南北红灯亮维持25秒,在南北红灯亮的同时东西绿灯也亮,并维持20秒。
到20秒时,东西绿灯闪亮,闪亮3秒后熄灭。
在东西绿灯熄灭时,东西黄灯亮,并维持2秒。
到2秒时,东西黄灯熄灭,东西红灯亮,同时,南北红灯熄灭,绿灯亮。
东西红灯亮维持30秒。
南北绿灯亮维持25秒,然后闪亮3秒后熄灭。
同时南北黄灯亮,维持2秒后熄灭,这时南北红灯亮,东西绿灯亮。
周而复始。
1三、程序设计步骤 1、过程分析:过程一:东西向车行驶2、设置定时器当司机看到红灯变为绿灯的时候需要有时间反应,启动车辆等。
因此在车子行驶和交通灯变化之间设置1s的间隔。
②设置T22、T222、T221、T223的原因是:T2和T7只能控制交通灯的闪亮时间,并不能使其控制。
T22一个定时器并不能同时控制东西绿灯与南北绿灯的闪烁,要分别设置控制器,所以通过T22、T222的分别作用,使东西绿灯与南北绿灯分别在高、低电平交替的时候闪亮。
24、按照设置的I/O分配进行接线。
5、打开PLC实验箱和实验面板上的电源开关,将预先编好的实验程序写入计算机,再下载到PLC中。
模拟交通灯实验报告
单片机综合实验报告题目: 模拟真实交通灯班级:姓名:学号:指导老师:时间:一、实验内容:用8255芯片的PA、PB口低四位做输出口,控制十二个发光二极管燃灭,模拟十字路口交通灯管理,并利用数码显示器进行倒计时显示(采用单片机内部定时器定时)。
通过外部中断能使交通灯暂停运行,并点亮4个红灯。
通过16*16点阵中的图形模拟控制行人过马路的人形“走”、“停”指示灯,可参考下图所示。
选做增加项目:在交通灯开始之前可通过开关对红绿灯亮灭时间的初始值进行增、减设定或者交通灯暂停时加上乐曲报警。
二、实验电路及功能说明电路:74LS138译码器电路8255与发光二极管连线图数码LED显示器电路(不需接线)16×16LED点阵显示电要求:交通灯亮灭过程同“8255控制交通灯实验”,倒计时显示只需两位数(0~99),用定时器定时进行倒计时,每秒钟减1。
在16*16点阵中显示的人形“走”、“停”标志可自定义,由专门软件可转换为相应显示代码,不需自己推理。
三、实验程序流程图:主程序:子程序:详细程序请参考程序清单。
四、实验结果分析对程序进行仿真可以观察到:点阵中交替显示如图(a)、(b)所示图像,且交替显示时间为30秒。
当显示图像为(a)时,表示可以容行人通过,限时30秒;当显示图像为(b)时,表示不容行人通过,也限时30秒。
如此,在十字路口各置一对点阵即可模拟实景。
五、心得体会通过此次实验,对单片机的I/O口的使用的条件有了更深的理解,对单片机的各个管脚功能的理解也加深了,以及在常用编程设计思路技巧的掌握方面也向前迈了一大步。
这次的课程设计让我把单片机的理论知识应用在实践中,实现了理论和实践相结合,从中更懂得理论是实践的基础,实践有助于检验理论的正确性的道理,对我以后参加工作或者继续学习深造将产生巨大的帮助和影响。
六、程序清单#include <reg51.h>#include <absacc.h>#define uchar unsigned char#define uint unsigned int#define ROW1 XBYTE[0XFFE3]#define ROW2 XBYTE[0XFFE0]#define COL1 XBYTE[0XFFE2]#define COL2 XBYTE[0XFFE1]#define PA XBYTE[0xffd8]#define PB XBYTE[0xffd9]#define CTL XBYTE[0xffdb]#define SEG XBYTE[0xffdc]#define BIT XBYTE[0xffdd]#define allredend 10#define ewredend 2*ewstarter+allredend#define snyellowend ewredend+10#define snredend snyellowend+2*snstarter#define ewyellowend snredend+10sbit KEY1=P1^0;sbit KEY2=P1^1;sbit KEY3=P1^2;sbit P32=P3^2;uchar tongBu;uchar code ewTable[]={0xb6,0x75,0xf3,0xf7,0xae,0x9e,0xbe};uchar code nsTable[]={0xd,0xd,0xc,0xd,0xb,0x7,0xf};//uchar tempa,tempb;int time=1,cnt,change,intflag,inttime=1,ewstarter=10,snstarter=15;int tempseg;uchar key1=0;uchar buffer[]={0,0,0,0,0,0};uchar table[]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,0xff};/*-- 行走--*//*-- 宽度x高度=16x16 --*/uchar code led1[]={0x01,0x80,0x02,0x40,0x02,0x40,0x01,0x80,0x03,0xC0,0x06,0x60,0x0A,0x50,0x0A,0x5 0,0x0B,0xD0,0x12,0x48,0x02,0x40,0x02,0x60,0x04,0x20,0x04,0x20,0x08,0x20,0x18,0x60};/*-- 停止--*//*-- 宽度x高度=16x16 --*/uchar code led2[]={0x01,0x80,0x02,0x40,0x02,0x40,0x01,0x80,0x07,0xE0,0x7E,0x7E,0x02,0x40,0x02,0x40 ,0x03,0xC0,0x01,0x80,0x01,0x80,0x01,0x80,0x01,0x80,0x01,0x80,0x01,0x80,0x03,0xC0};/*-- 文字: 高--*//*-- Fixedsys12; 此字体下对应的点阵为:宽x高=16x16 --uchar code led2[]={0x02,0x00,0x01,0x00,0xFF,0xFE,0x00,0x00,0x0F,0xE0,0x08,0x20,0x0F,0xE0,0x00,0x0 0,0x7F,0xFC,0x40,0x04,0x4F,0xE4,0x48,0x24,0x48,0x24,0x4F,0xE4,0x40,0x14,0x40,0x08};*/ void delayshort(){char n;for(n=50;n>0;n--);}uchar changeleft(uchar led){uchar temp;temp=0;temp|=(led<<7)&0x80;temp|=(led<<5)&0x40;temp|=(led<<3)&0x20;temp|=(led<<1)&0x10;temp|=(led>>1)&0x08;temp|=(led>>3)&0x04;temp|=(led>>5)&0x02;temp|=(led>>7)&0x01;return(temp);}void led16_16display(uchar *table,uchar length){uchar i=length/2,scan1=0x1,scan2=0x1;for(i=0;i<16;i++){if(i<8){ROW1=0;ROW2=0;COL1=scan1;COL2=0;ROW1=changeleft(table[2*i]);ROW2=table[2*i+1];COL1=scan1;COL2=0;delayshort();scan1<<=1;}else{ROW1=0;ROW2=0;COL1=0;COL2=scan2;ROW1=changeleft(table[2*i]);ROW2=table[2*i+1];COL1=0;COL2=scan2;delayshort();scan2<<=1;}}}void changeseg(){if(key1==0){buffer[3]=10;buffer[0]=10;buffer[5]=tempseg%10;buffer[4]=tempseg/10;buffer[2]=tempseg%10;buffer[1]=tempseg/10;}else if(key1==1){buffer[3]=10;buffer[0]=10;buffer[5]=ewstarter%10;buffer[4]=ewstarter/10;buffer[2]=ewstarter%10;buffer[1]=ewstarter/10;}else{buffer[3]=10;buffer[0]=10;buffer[5]=snstarter%10;buffer[4]=snstarter/10;buffer[2]=snstarter%10;buffer[1]=snstarter/10;}}void timer1()interrupt 3{static uchar temp=0x20,cnt1;TH1=(65536-1000)/256;TL1=(65536-1000)%256;changeseg();SEG=0xff;SEG=table[buffer[cnt1]];cnt1++;if(cnt1==6)cnt1=0;BIT=temp;temp>>=1;if(temp==0)temp=0x20;}void int_0()interrupt 0{delayshort();if(P32==0){PA=0xB6;PB=0xd;PT0=1;PT1=1;intflag=1;while(inttime<=20)led16_16display(led2,32);inttime=1;intflag=0;PT0=0;PT1=0;PA=ewTable[tongBu];PB=nsTable[tongBu];}}void timer0()interrupt 1{TH0=(65536-50000)/256;TL0=(65536-50000)%256;cnt++;if(cnt==5){cnt=0;if(intflag==1){inttime++;tempseg=10-inttime/2;}else{time++;if(time<=allredend){tongBu=0;PA=ewTable[tongBu];PB=nsTable[tongBu];tempseg=allredend/2-(time+1)/2;}else if((time>allredend)&&(time<=ewredend)){tongBu=1;PA=ewTable[tongBu];PB=nsTable[tongBu];tempseg=ewstarter+allredend/2-(time+1)/2;}else if((time>ewredend)&&(time<=snyellowend)){if(change==0){tongBu=2;PA=ewTable[tongBu];PB=nsTable[tongBu];change=1;}else{tongBu=3;PA=ewTable[tongBu];PB=nsTable[tongBu];change=0;}tempseg=ewstarter+allredend/2+5-(time+1)/2;}else if((time>snyellowend)&&(time<=snredend)){tongBu=4;PA=ewTable[tongBu];PB=nsTable[tongBu];tempseg=ewstarter+allredend/2+5+snstarter-(time+1)/2;}else if((time>snredend)&&(time<=ewyellowend)){if(change==0){tongBu=5;PA=ewTable[tongBu];PB=nsTable[tongBu];change=1;}else{tongBu=6;PA=ewTable[tongBu];PB=nsTable[tongBu];change=0;}tempseg=ewstarter+10+allredend/2+snstarter-(time+1)/2;}else{tongBu=1;time=allredend+1;PA=ewTable[tongBu];PB=nsTable[tongBu];tempseg=ewstarter+allredend/2-(time+1)/2;}}}}void key(){uchar keynum;keynum=~(P1|0XF8);switch(keynum){case 0x1:while(KEY1==0)led16_16display(led2,32);key1++;TR0=0;if(key1==3){key1=0;TR0=1;}break;case 0x2:while(KEY2==0)led16_16display(led2,32);if(key1==1){ewstarter++;if(ewstarter==100)ewstarter=0;}if(key1==2){snstarter++;if(snstarter==100)snstarter=0;}break;case 0x4:while(KEY3==0)led16_16display(led2,32);if(key1==1){ewstarter--;if(ewstarter==-1)ewstarter=99;}if(key1==2){snstarter--;if(snstarter==-1)snstarter=99;}break;default:break;}}void main(){IE=0x8b;IT0=1;TMOD=0x11;TH0=(65536-50000)/256;TL0=(65536-50000)%256;TH1=(65536-1000)/256;TL1=(65536-1000)%256;CTL=0x80;tongBu=0;TR1=1;PA=ewTable[tongBu];PB=nsTable[tongBu];tempseg=allredend/2-(time+1)/2;TR0=1;while(1){key();if(intflag==0){if(key1==0){if(time<=allredend)led16_16display(led2,32);else if(time>allredend&&time<=snyellowend)led16_16display(led1,32);else if(time>snyellowend&&time<=ewyellowend)led16_16display(led2,32);}elseled16_16display(led2,32);}}}。
交通灯模拟控制plc实验报告

交通灯模拟控制plc实验报告交通灯模拟控制PLC实验报告一、实验背景与目的交通灯是城市道路交通管理的重要设施,安全的交通灯控制是保障行人和车辆安全通行的重要保障。
本实验是以PLC控制器为核心设计的交通灯模拟控制实验,旨在通过实验学习PLC的基础知识,了解PLC在交通灯控制中的运用方式,掌握常用的PLC控制方法,进一步提高学生的工程实践能力。
二、实验原理1.交通灯控制方式通常情况下,交通灯主要采用三种控制方式:定时控制、信号协调控制和应急控制。
其中,定时控制是指交通灯按固定的时间间隔进行交替控制,适用于交通量少、时间规律的路段;信号协调控制是基于交通流量实时监测和协调控制交通灯,以提高交通能力和效率,适用于交通量较大、较为复杂的路段,如城市繁忙路口、高速公路入口等;应急控制是指在一定情况下强制交通灯进行跳闸或其他应急控制方法,以保障交通安全和畅通。
2.PLC控制原理PLC,全称可编程逻辑控制器,是一种工业控制计算机,广泛应用于现代制造业、工业自动化等领域。
PLC可通过编写相应的程序来实现对机器人、自动化生产线、传感器等设备的控制,可以有效提高生产效率和控制精度。
在交通灯控制中,PLC主要通过接收来自传感器等外部设备的输入信号和内部程序自动判断下一步操作,并通过控制输出口控制交通灯的开关状态,以实现交通灯的自动控制。
三、实验器材PLC控制器、交通灯模拟器、计算机、连线电缆等。
四、实验步骤本次实验的PLC控制程序采用三段式控制方式,分别为红灯亮、倒计时、绿灯亮,时间周期均为10秒。
具体实验步骤如下:1.将PLC控制器与计算机通过连线电缆连接,使得PLC控制器能够接收计算机传来的控制程序。
2.将模拟交通灯的控制线路连接至PLC控制器的输入口,将交通灯的灯泡接到PLC输出口;3.在计算机上编写PLC控制程序,实现三段式控制方式,并将程序加载至PLC控制器;4.打开PLC控制程序,通过模拟交通灯的测试,验证PLC 控制程序的正确性;5.在实验结束后,关闭实验设备,并将连线电缆拔出。
任务三 十字路口交通灯的PLC控制

黄灯 HL3亮
2
当东西方向的红灯亮30s期间,南北方向的绿灯亮25s,后闪3次,共3s, 然后绿灯灭,接着南北方向的黄灯亮2s,完成了半个循环;再转换成南北 方向的红灯亮30s,在此期间,东西方向的绿灯亮25s,后闪3次,共3s,然 后绿灯灭,接着东西方向的黄灯亮2s,完成一个周期,进入下一个循环。
26
项目三 任务三 十字路口交通信号灯的PLC控制
27
考核内容 电路及
程序设计
安装与连线
调试与运行 安全操作
表3-16 任务考核表
考核要求
评分标准
配分 得分
(1)能正确分配I/O, 并绘制I/O接线图
(2)根据控制要求, 正确编制梯形图程序
(1)I/O分配错或少,每个扣5分 (2)I/O接线图设计不全或有错,每处扣5分 (3)三相异步电动机单向连续运行主电路表达不正确或 画法不规范,每处扣5分 (4)梯形图表达不正确或画法不规范,每处扣5分
Y元件编号
Y0 Y1 Y2 Y3 Y4 Y5
16
项目三 任务三 十字路口交通信号灯的PLC控制
图3-66 十字路口交通信号灯控制I/O接线图
图3-67 十字路口交通信号灯控制功能图
17
项目三 任务三 十字路口交通信号灯的PLC控制
➢ 编制程序
图3-68 十字路口交通信号灯控制梯形图
18
项目三 任务三 十字路口交通信号灯的PLC控制
40分 20分 20分
确保人身和设备安全 违反安全文明操作规程,扣10~20分
20分
合计
22
项目三 任务三 十字路口交通信号灯的PLC控制
… …
五、知识拓展
(一)部分重复的编程方法
PLC实验指导书

实验一十字路口交通灯的模拟控制学院:专业班级:学生姓名:班级序号:实验日期:指导老师(签字):一、实验目的熟练使用各基本指令,根据控制要求,掌握PLC的编程方法和程序调试方法,用PLC构成交通灯控制系统。
二、实验仪器与设备FX3U三菱可编程控制器主机挂箱、台式电脑、装配流水线/十字路口交通灯实验挂箱。
三、实验内容图1 十字交通灯控制示意图如上图1所示,十字交通灯模拟挂箱可分为4个区域,即电源区、I/0输入点区、I/O输出点区、指示灯区。
实验时,电源区接上PLC主机挂箱上的24V电源;I/O输入点接PLC的I/O输入口(即X0~X17口);I/O输出点接PLC的I/O输出口(即Y0~Y17);指示灯区会按I/O输出点区所接受到的信号进行显示,直接反映了梯形图程序的控制效果。
1.控制要求按下起动按钮SB后,南北红灯亮并维持10S。
在南北红灯亮的同时,东西绿灯也亮,到7S时,东西绿灯灭同时东西黄灯开始亮,3S后,东西黄灯灭、南北红灯灭,同时东西红灯亮,南北绿灯也亮。
南北绿灯亮7S后灭,南北绿灯灭后南北黄灯亮,3S后南北黄灯灭、东西红灯灭,同时南北红灯亮,东西绿灯亮,循环。
总的说来,遵照十字交通灯基本规则,绿灯亮7S,黄灯亮3S,红灯亮10S。
以上为本实验的最基本要求,感觉无压力的同学可在此要求下添加功能,如:通行绿灯亮到第5S之后开始变成闪烁,闪烁2S之后熄灭;通行绿灯亮0.5S之后相对应的通行车灯甲(模拟东西方向的车流)或乙(模拟南北方向的车流)开始亮,通行绿灯灭的同时相对应的通行车灯甲或乙也灭。
2.I/O分配输入输出起动按钮:X0 东西绿灯:Y0 南北绿灯:Y3东西黄灯:Y1 南北黄灯:Y4东西红灯:Y2 南北红灯:Y5甲:Y6 乙:Y73.梯形图设计4.调试并运行程序。
程序运行结果:指导老师现场验收签名:四、预习要求请按照控制要求预先设计好梯形图,并进行仿真测试,判断所设计的梯形图是否能实现控制要求的功能。
PLC三菱实验指导书3_图文(精)

目录实验一可编程控制器基本指令实验 (3 实验二喷泉的模拟控00000制 (6实验三数码显示的模拟控制 (8实验四舞台灯光的模拟控制 (12实验五天塔之光的模拟控制 (15实验六灯的交通模拟控制 (18实验七四节传送带的模拟控制 (21实验八轧钢机的模拟控制 (26实验九邮料分拣的模拟控制 (28实验十装配流水线的模拟控制 (33实验十一液体混合的模拟控制 (37实验十二机械手的模拟控制 (39实验十三四层电梯的模拟控制 (42实验十四Y/△换接启动的模拟控制(55实验十五五相步进电机的模拟控制 (56 实验十六水塔水位的模拟控制58 实验十七运料小车控制模拟 (60实验十八加工中心模拟实验 (61实验十九自动售货机的模拟控制 (65 实验二十工业洗衣机的模拟控制 (66 实验二十一电镀生产线的模拟控制 (67 实验二十二机械滑台的模拟控制 (68 实验二十三抢答器的模拟控制 (70实验二十四自动配料系统模拟实验 (71 实验二十五直线运动的模拟控制 (73 +实验一可编程控制器基本指令实验一.实验目的熟练掌握可编程控制器的基本指令。
二.实验内容1.线圈驱动指令LD、LDI、OUTLD,取指令。
表示一个与输入母线相连的常开接点指令,即常开接点逻辑运算起始。
LDI,取反指令。
表示一个与输入母线相连的常闭接点指令,即常闭接点逻辑运算起始。
OUT,线圈驱动指令,也叫输出指令。
LD、LDI两条指令的目标元件是X、Y、M、S、T、C,用于将接点接到母线上。
也可以与ANB指令、ORB指令配合使用,在分支起点也可使用。
OUT是驱动线圈的输出指令,它的目标元件是Y、M、S、T、C。
对输入继电器X不能使用。
OUT指令可以连续使用多次。
LD、LDI是一个程序步指令,这里的一个程序步即是一个字。
OUT是多程序步指令,要视目标元件而定。
OUT指令的目标元件是定时器T和计数器C时,必须设置常数K。
2.接点串联指令AND、ANIAND,与指令。
PLC交通灯模拟控制
湘潭职业技术学院毕业设计题目PLC交通灯模拟控制学生姓名郭远专业应用电子指导教师龙小波班级电子053012007年6月12日目录前言 (3)1.功能说明 (4)2.工作原理 (7)3.效果图 (12)4.梯形图 (13)5.难点与调试记录 (19)6.PLC控制交通灯的方法 (20)7.心得体会 (21)8.致谢 (22)9.参考文献 (23)10.附录 (24)前言在当今高速发展的社会里,交通问题已成为了大家关注的社会问题。
随着社会经济的发展,城市交通问题越来越引起人们的关注。
人、车、路三者关系的协调,已成为交通管理部门需要解决的重要问题之一。
交通信号灯的出现,使交通得以有效管制,对于疏导交通流量、提高道路通行能力,减少交通事故有明显效果。
为了实现交通道路的管理,力求交通管理先进性、科学化。
用可编程控制器(PLC)实现交通灯管制的控制系统,以及该系统软、硬件设计方法,实验证明该系统实现简单、经济,能够有效地疏导交通,提高交通路口的通行量。
城市交通控制系统是用于城市交通数据监测、交通信号灯控制与交通疏导的计算机综合管理系统,它是现代城市交通监控指挥系统中最重要的组成部分。
分析了现代城市交通控制与管理问题的现状,结合交通的实际情况阐述了交通灯控制系统的工作原理,给出了一种简单实用的城市交通灯控制系统的PLC设计方案。
可编程序控制器在工业自动化中的地位极为重要,广泛的应用于各个行业。
随着科技的发展,可编程控制器的功能日益完善,加上小型化、价格低、可靠性高,在现代工业中的作用更加突出。
所以,如何采用合适的控制方法,最大限度利用好耗费巨资修建的城市高速道路,缓解主干道与匝道、城区同周边地区的交通拥堵状况,越来越成为交通运输管理和城市规划部门亟待解决的主要问题。
PLC的发展史:在可编程控制器出现以前,继电器控制在工业控制领域占主导地位,由此构成的控制系统都是按预先设定好的时间或条件顺序地工作,若要改变控制的顺序就必须改变控制系统的硬件接线,因此,其通用性和灵活性较差。
微机原理课程设计——8255_8253交通灯模拟实验

微机原理课程设计一.设计任务及要求:交通信号灯的控制:1.通过8255A并口来控制LED发光二极管的亮灭。
2.A口控制红灯,B口控制黄灯,C口控制绿灯。
3.输出为0则亮,输出为1则灭。
4.用8253定时来控制变换时间。
要求:设有一个十字路口,1、3为南,北方向,2、4为东西方向,初始态为4个路口的红灯全亮。
之后,1、3路口的绿灯亮,2、4路口的红灯亮,1、3路口方向通车。
延迟30秒后,1、3路口的绿灯熄灭,而1,3路口的黄灯开始闪烁(1HZ)。
闪烁5次后,1、3路口的红灯亮,同时2、4路口的绿灯亮,2、4路口方向开始通车。
延迟30秒时间后,2、4路口的绿灯熄灭,而黄灯开始闪烁。
闪烁5次后,再切换到1、3路口方向。
之后,重复上述过程。
二.方案比较及评估论证:分析题意,红,黄,绿灯可分别接在8255的A口,B口和C口上,灯的亮灭可直接由8086输出0,1控制。
30秒延时及闪烁由8253控制,由闪烁的实现方法可分为两种方案:方案一:设8253各口地址分别为:设8253基地址即通道0地址为04A0H;通道1为04A2H;通道2为04A4H;命令控制口为04A6H。
黄灯闪烁的频率为1HZ,所以想到由8253产生一个1HZ的方波, 8255控制或门打开的时间,在或门打开的时间内,8253将方波信号输入或门使黄灯闪烁。
由于计数值最大为65535,1MHZ/65536的值远大于2HZ,所以采用两个计数器级联的方式,8253通道0的clock0输入由分频器产生的1MHZ时钟脉冲,工作在方式3即方波发生器方式,理论设计输出周期为0.01s的方波。
1MHZ的时钟脉冲其重复周期为T=1/1MHZ=1 s,因此通道0的计数初值为10000=2710H。
由此方波分别作为clock1和clock2的输入时钟脉冲,所以通道1和通道2的输入时钟频率为100HZ,通道1作计数器工作在方式1,计数初值3000=BB8H既30s,计数口,8255将A口数据输入到8086,8086检测到则输出一个高电平到8255的PA7到高电平既完成30s定时。
交通灯控制实验(8255)
实验二
交通灯控制实验(8255) 交通灯控制实验(8255)
一、实验目的
掌握8255方式0的工作原理及使用方法。 掌握8255方式0的工作原理及使用方法。 8255方式
二、实验内容
微机接口实验
实验二
交通灯控制实验(8255) 交通灯控制实验(8255)
一、实验目的 掌握8255方式0的工作原理及使用方法。 掌握8255方式0的工作原理及使用方法。 8255方式 二、实验内容 通过并行接口8255 通过并行接口8255实现十字路口交通 8255实现十字路口交通 灯的模拟控制。如图,L7、L6、L5作为南 灯的模拟控制。如图,L7、L6、L5作为南 北路口的交通灯与PC7 PC6、PC5相连 PC7、 相连, 北路口的交通灯与PC7、PC6、PC5相连, L2、L1、L0作为东西路口的交通灯与 作为东西路口的交通灯与PC2 L2、L1、L0作为东西路口的交通灯与PC2 PC1、PC0相连 相连。 、PC1、PC0相连。编程使六个灯按交通灯 变化规律燃灭。 变化规律燃灭。
交通灯控制
二、实验内容
通过并行接口8255 通过并行接口8255实现十字路口交通 8255实现十字路口交通 灯的模拟控制。 L7、L6、L5作为 灯的模拟控制。如下图,L7、L6、L5作为 南北路口的交通灯与PC7 PC6、PC5相连 PC7、 南北路口的交通灯与PC7、PC6、PC5相连 L2、L1、L0作为东西路口的交通灯与 ,L2、L1、L0作为东西路口的交通灯与 PC2、PC1、PC0相连 相连。 PC2、PC1、PC0相连。编程使六个灯按交 通灯变化规律燃灭。 通灯变化规律燃灭。
交通灯控制
三、实验电路
8255 地址: 地址:
控制寄存器: 控制寄存器: C口地址: 口地址: 28BH 28BH 288H 288H
智能交通灯控制系统的设计与模拟
露
苎 ! 黪
。 l与 应 用
数 控 技 术
} v o i d t i me 0 ()i n t e r r u 【 p t 1 { TL 0 = ( 6 5 5 3 6 - 5 0 0 ) %2 5 6 ; TH0 =( 6 5 5 3 6 — 5 0 0 ) / 2 5 6 ;
数 控 技 术
智能交通灯控制系统的设计与模拟
吕冠 艳 王 高 吴 翠 红
( 1 冲 北 大 学信 息与通 信 工程 学 院 山西 太原 0 3 0 0 5 1 ; 2 . 山 西水利 职 业技 术 学 院信 息工程 系 山西运 城 0 4 4 0 0 4 )
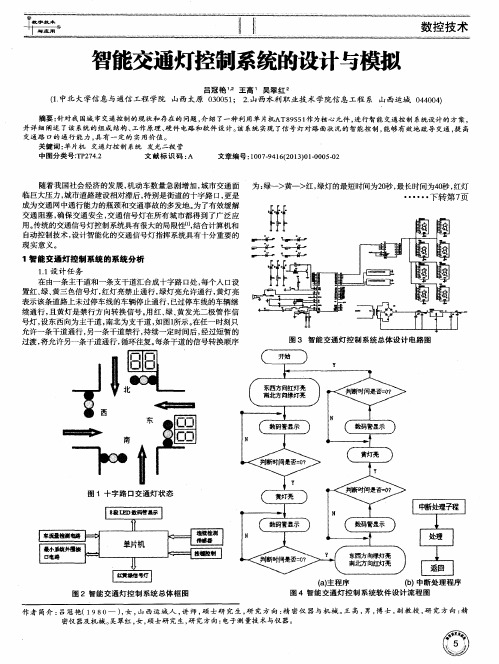
摘要: 针 对我 国城 市交通 控制 的现 状 和存 在 的 问题 , 介绍 了一种 利 用单 片机AT 8 9 s 5 1 作 为核 心 元件 , 进 行智 能 交通控 制 系统设计 的 方案 , 并详 细 阐述 了该 系统 的 组成 结 构 、 工 作原 理 、 硬 件 电路 和软 件 设 计 。 该 系统 实现 了信 号 灯 对路 面状 况的 智能 控 制 , 能 够有 效 地疏 导 交通 , 提高 交通 路 口的 通行 能 力 , 具 有 一 定 的 实用 价值 。 关键 词 : 单 片机 交通灯 控制 系统 发光 二板 管
中 图分 类号 : T P 2 7 4 . 2 文献标识码 : A 文章 编号 : 1 0 0 7 - 9 41 6 ( 2 01 3 ) 0 1 . 0 0 0 5 - 0 2
.
▲ A髓
随着 我国社会经济的发展 , 机动车数量急剧增加 , 城市交通面 为 : 绿一 > 黄一>红 , 绿灯的最短 时间为2 0 秒, 最长 时间为4 0 秒, 红灯 临巨大压力 , 城 市道路建设相对滞后 , 特别是街道 的十字路 口, 更是 下转第7 页 成为交通 网中通行能力的瓶颈和交通事故 的多发地 。 为了有效缓解 交通阻塞 , 确保交通安全 , 交通信号灯在所有城市都得到了广泛应 用。 传统的交通信号灯控 制系统具有很大的局限. 眭I “ , 结合计算机和 自动控 制技术 , 设计智能化 的交通信号灯指挥系统具有十分 重要 的 现实意 义。
交通灯的PLC控制系统设计-《机电传动及控制》课程设计-毕业设计

交通灯的PLC控制系统设计-《机电传动及控制》课程设计-毕业设计课程设计题目交通灯的PLC控制系统设计学院物流工程学院专业物流工程班级物流姓名指导教师2013 年7 月 5 日课程设计任务书学生姓名:专业班级:物流卓越xxx班指导教师: xxxx教授工作单位:物流工程学院题目:交通灯的PLC控制系统设计初始条件:1)PLC型号:西门子公司S7系列,S7-3002)编程环境:SIMATIC Manager /Step7 V5.4或更高版本3)根据控制要求分配PLC I/O地址,画出PLC与控制对象的接线图,设计控制流程,按照模块化的方式设计程序,既可以采用LAD编程,也可以采用STL 编程,还可以采用组合方式编程。
4)编写的需要输入PLC,调试通过。
要求完成的主要任务:1)十字路口交通信号灯,共有两组信号灯,其中一组控制直行,一组控制转弯。
当轮到一个方向开始直行时,控制该方向直行的绿灯亮,指示该方向可以直行,并维持20s,当通行时间即将结束时,绿灯闪烁3s以作提示。
2)随后,该方向的黄灯亮2s,熄灭,通行时间结束,该方向的红灯亮,禁止该方向通行。
同时控制该方向转弯的绿灯亮,指示该方向转弯,转弯时,绿灯维持15s,当转弯时间即将结束时,绿灯闪烁3s以作提示。
3)紧接着,该方向的黄灯亮2s,熄灭,转弯时间结束。
4)接下来,该方向的红灯亮,禁止该方向转弯。
同时另一方向直行的绿灯亮,轮到另一方向直行了。
如此周而复始。
指导教师签名:年月日系主任(或责任教师)签名:年月日摘要城市规模不断扩大,城市的交通问题也变的日益突出,如堵车问题,城市交通问题也越来越引起人们的关注,人、车、路三者关系的协调,已成为交通管理部门需要解决的重要问题之一。
为了解决交叉口混合交通流中的相互影响或彼此的相互影响,我们可以合理的设置交叉路口的红绿灯系统,帮助疏导交通流,从而有效的减少交通阻塞等问题,并为行人的安全提供强有力地保障。
现在,城市的红绿灯基本上都是程序控制,在实际使用中采用可编程序控制器(PLC)控制占很大比例,其主要原因是因为PLC具有简单易懂、操作方便、可靠性高、通用灵活、体积小、使用寿命长等一系列的优点。
一种基于PLC的十字路口交通灯模拟控制

【 关键词】 P L C ; 自动控制 ; 梯 形图; 交通 灯控制 系统
1 . 十字路 口交通灯模拟控制的具体 设计
1 . 1 系统的控制要求 交 通信 号灯由红、 绿、 黄三种颜 色组成 。禁 止通行用红色表示 , 准 许通行用绿 色用表示 . 警示黄 色用表示 。交 通信号灯用于城市道路 的 十字路 口 . 通过 到达同一 十字路 口的交 通车辆和市民行人发 出停止或 前进 的指令 . 十字路 口的通行 能力 得到 了提高 . 畅通 和安 全得到 了有 效 的保 障。 该 系统现场示意 图如 图 1 所示 , 南北和东 西每个 方向各有红 、 绿、 黄三种 颜色的信号灯 . 为了能够 提高通行安全 性 . 要求实 现以下三点
输人 S D 输出 南北 G 南北 南北 东西 G 东西 Y 东西 R 警示灯
Y R
Y4 Y1 Y1 YO Y3
直 至 运 行 结 果 和 控 制 要 求 一 致 。 Q
【 参考文献 】
[ 1 ] 瞿 彩萍 . P L C应 用技术 ( 三 菱) . 北京: 中国劳动社 会保 障 出版社 , 2 0 0 6 : 1 3 2
接线
4 P L C的外部接线 图 1 3 9. 由交通 灯系统 的输 入/ 输 出( I / O ) 端 口分 配表可知 , P L C的外 部接 [ 2 ] P L C与变频器技能实训 . 北京 : 高等教育出版社 , 2 0 1 1 , 7 : 1 2 4 — 1 3 6 . 线图如 图 1 - 3所示 。 [ 3 ] P L C技术项 目实训及应 用 E 京: 高等教育出版社 , 2 0 1 2 : 2 9 — 3 2 .
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
输入
输出
起动按钮:I0.0
南北红灯:Q0.0
停止按钮I0.2
南北黄灯:Q0.1
南北绿灯:Q0.2
东西红灯:Q0.3
东西黄灯:Q0.4
东西绿灯:Q0.5
南北车灯(乙):Q0.6
东西车灯(甲)Q0.7
四、交通灯控制顺序功能图
五、交通灯控制梯形图
实验四交通灯的模拟控制
一、实验目的
用PLC构成交通灯控制系统
二、实验内容
1.控制要求
起动后,南北红灯亮并维持25s。在南北红灯亮的同时,东西绿灯也亮,1s后,东西车灯即甲亮。到20s时,东西绿灯闪亮,3s后熄灭,在东西绿灯熄灭后东西黄灯亮,同时甲灭。黄灯亮2s后灭东西红灯亮。与此同时,南北红灯灭,南北绿灯亮。1s后,南北车灯即乙亮。南北绿灯亮了20s后闪亮,3s后熄灭,同时乙灭,黄灯亮ቤተ መጻሕፍቲ ባይዱs后熄灭,南北红灯亮,东西绿灯亮,循环。