列车网络系统
CRH5网络控制系统3.

I/O 2 Red.
I/O NON Red.
系统正常情况下,编组中存在的MPU 1 和2 均开启并运行。 网关1(GW-MVB)工作,而WTB 线上的网关2 则不工作,但它在 MVB 线上工作。在正常运行中,两者都采集信号、处理应用逻 辑并发送其相应的指令。MPU(主处理单元)“1”是MVB 1 和2 线上的控制器(MASTER),它直接控制I/O“1”输出,而 MPU“2”则直接对I/O“2”输出发送指令。每个MPU 均接收在 线路1 和线路2 上由I/O 采集的所有信号。CRH5 型动车组网络 控制系统中网关、MPU、I/O 模块等主要设备均采用冗余设计, 当其中一个设备发生故障后,系统仍将正常运行,很大程度的 提高了系统的稳定性。实际运用中,该系统偶有因多种原因导 致单个网关或MPU 通讯故障,由于该系统具有良好的冗余性, 局部的通讯不畅基本不影响动车组正常运。
• 2、 MPU冗余性
• MPU的冗余类型为热备冗余。两个MPU均 可管理其MVB总线(单条或多条)。它们 读取相同的输入,并执行相同的任务。在 故障情况下一个会自动接替另一个。同一 总线上的所有设备均由同一MPU发送指令 。
• 当MPU1故障时,MPU2替代了MPU1作为 MVB“1”和MVB“2”线上的主控制器。
–两个动车组之间的连接通过穿过头车自动车钩 的“WTB”(列车总线)型冗余链路来实现。
–此总线是TCN网络的一部分,它在长度因挂钩/ 摘钩操作而发生变化时可以实现网络的动态重 组(网关重新编号)。
–该总线使用具有可控阻抗的冗余介质,其传输 的信息速率约为1 Mb/s。传输距离为860米,22 个节点,备用节点有4 个。
网络控制系统的强大功能,使动车组实时控制的可 靠性和智能性得到了很大提高,对动车组各设备状态进行 了有效的实时监控和管理,很大程度的提高了动车组的可 操纵性。
高速列车“指挥官”——列车网络控制系统
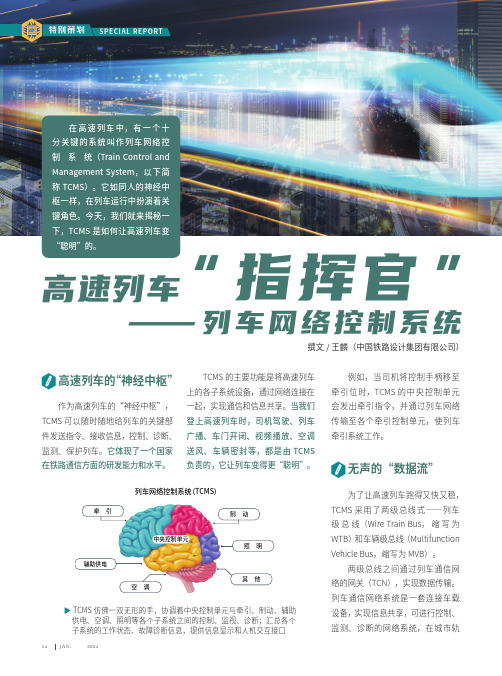
202414JAN.撰文/王麟(中国铁路设计集团有限公司)高速列车“指挥官”在高速列车中,有一个十分关键的系统叫作列车网络控制系统(Train Control and Management System,以下简称TCMS)。
它如同人的神经中枢一样,在列车运行中扮演着关键角色。
今天,我们就来揭秘一下,TCMS 是如何让高速列车变“聪明”的。
高速列车的“神经中枢”作为高速列车的“神经中枢”,TCMS 可以随时随地给列车的关键部件发送指令、接收信息,控制、诊断、监测、保护列车。
它体现了一个国家在铁路通信方面的研发能力和水平。
—列车网络控制系统例如,当司机将控制手柄移至牵引位时,TCMS 的中央控制单元会发出牵引指令,并通过列车网络传输至各个牵引控制单元,使列车牵引系统工作。
无声的“数据流”为了让高速列车跑得又快又稳,TCMS 采用了两级总线式——列车级总线(Wire Train Bus,缩写为WTB)和车辆级总线(MultifunctionVehicle Bus,缩写为MVB)。
两级总线之间通过列车通信网络的网关(TCN),实现数据传输。
列车通信网络系统是一套连接车载设备,实现信息共享,可进行控制、监测、诊断的网络系统,在城市轨列车网络控制系统(TCMS)▶TCMS 仿佛一双无形的手,协调着中央控制单元与牵引、制动、辅助供电、空调、照明等各个子系统之间的控制、监视、诊断;汇总各个子系统的工作状态、故障诊断信息,提供信息显示和人机交互接口SPECIAL REPORT特别策划TCMS 的主要功能是将高速列车上的各子系统设备,通过网络连接在一起,实现通信和信息共享。
当我们登上高速列车时,司机驾驶、列车广播、车门开闭、视频播放、空调送风、车辆密封等,都是由TCMS负责的,它让列车变得更“聪明”。
”道车辆中也应用广泛。
列车级总线将车辆级总线的关键数据,传递给中央控制单元;车辆级总线和输入、输出模块,则负责实现各个子系统与中央控制单元之间的数据交换。
列车控制网络概论

列车控制网络概论首先,列车控制网络的核心部分是列车间的通信系统。
通过通信系统,列车可以与列车控制中心进行实时通信,以接收指令、传递信息等。
这样可以保障列车运行时的时刻控制和相关信息交流,实现列车与控制中心之间的远程操作和监控。
通信系统一般采用无线电通信、微波通信等技术,能够实现高效的数据传输,确保列车间的通信畅通。
其次,列车控制网络的另一个核心组成部分是信号系统。
信号系统是用于控制列车运行的系统,通过信号灯、信号机等设备向列车驾驶员传递指令和信息,引导列车运行和停车。
信号系统一般采用计算机及传感器等技术,能够准确判断列车位置和运行情况,确保列车安全运行。
此外,列车控制网络还包括列车控制中心和相关设备。
列车控制中心是指用于监控和操作列车运行的中央控制室,通过显示屏、操作台等设备实现对列车运行的实时监控和控制。
相关设备包括列车控制器、故障检测设备等,用于控制列车的加速、制动、转向和检测列车故障等。
这些设备能够对列车的运行状态进行实时监测和管理,确保列车安全运行。
总体来说,列车控制网络通过通信系统、信号系统、列车控制中心和相关设备等组成部分构成了一个完整的网络体系,实现对列车运行的控制和管理。
它能够实现列车与控制中心之间的远程操作和监控,提高列车运行的效率和安全性,减少人为的操作错误和事故发生。
值得注意的是,列车控制网络的设计和建设对于实现列车运行的智能化和自动化非常重要。
随着科技的不断发展,列车控制网络正在向更加先进的方向发展,例如自动驾驶列车技术的应用,使得列车能够在无人驾驶的情况下实现运行。
这些发展将进一步提高列车运行的安全性和效率,推动铁路系统的现代化进程。
综上所述,列车控制网络是现代化铁路系统中的重要组成部分,通过通信系统、信号系统、列车控制中心和相关设备等实现对列车运行的控制和管理。
它能够实现列车与控制中心之间的远程操作和监控,提高列车运行的效率和安全性。
随着科技的进步,列车控制网络将不断发展,使铁路系统实现更加智能和自动化的运行。
铁路G网系统简介和组成
高速铁路
高速铁路是G网系统应用的另一重要 领域。G网系统能够提供高质量的无 线通信和宽带数据传输服务,支持列 车控制系统、调度指挥系统、旅客服 务系统等众多子系统的通信需求。
VS
G网系统的应用能够提高高速铁路的 运营效率和安全性,为旅客提供更加 便捷、舒适的出行体验。
智能化管理
数据整合
G网系统将各类数据整合到一个平台上,方便管理人员进行统一管理和调度。通过数据分析和挖掘,为决策提供 有力支持。
自动化控制
G网系统采用先进的自动化控制技术,实现列车自动调度、信号自动控制等功能,提高运输效率和管理水平。
高效运营
资源共享
G网系统实现资源共享,提高资源利用效率。通过集中管理和调度,降低运营成本和维护难度。
灵活扩展
G网系统具备良好的灵活扩展性,可根据业务需求进行快速部署和升级。同时,系统支持与其他铁路 系统的互联互通,促进铁路行业的整体发展。
04
G网系统的应用场景和优 势
城市轨道交通
城市轨道交通是G网系统应用的重要领域之一。G网系统能够提供高效、安全、可靠的通信服务,支持列车控制系统、乘客信 息系统、公共安全系统等众多子系统的通信需求。
通信系统
1
通信系统是铁路G网系统中实现信息传递和交换 的关键部分。
2
通信系统包括有线通信、无线通信和卫星通信等 多种方式,为列车、车站、控制中心等提供语音、 数据和图像的传输服务。
3
通信系统在铁路G网系统中起到信息传递的桥梁 作用,保障列车运行的安全和高效。
列车控制系统
列车控制系统是铁路G网系统中实现列车运行 自动化的重要组成部分。
CRH3-380BL型动车组列车网络控制系统

支持4095个设备,其中有256个是能参与消息传送的站。
Data 据 节点 MVB 数 节点 列车总线 WTB 节点
MVB
MVB
设备总 线
车 辆 总 线
列车通信网络拓扑结构
(1)车辆总线MVB的特点
传输速率 时 介 延 质
1.5Mbits/s 0,001 秒 双绞线、光纤 255 个可编程设备 4095 简单的传感器/执行器
• 从CCU功能
从CCU和主CCU的运行程序相同,但没有主动控制过程。从 CCU监视主CCU的状态,并在主CCU发生故障时,接管主CCU 的工作。但主、从CCU对高压设备硬件的保护功能除外。
• 列车主CCU功能 除了主CCU的工作之外,列车主CCU还执行整车更高 等级的控制:
• • • • 评估司机操作台上的控制元件; 整车的牵引设置点生成; 速度自动控制; 更高等级的列车控制功能,例如司机安全装置(DSD)、 中心距离和速度记录(CDS); • 列车保护系统与列车控制系统的接口; • 更高等级的静态检测和自动整备控制;
从站数量
传输距离
双绞线< 200 m,光纤<2000m
(2)MVB传输介质
• ESD 电气短距离介质传送距离≤20米,使用标准的RS-485收发器,每段最多支持32个设备;
• EMD 电中距离介质传送距离≤200米,每段最多支持32个设备,屏蔽双绞线,变压器隔离;
• OGF 光学玻璃纤维介质,星型连接或点到点方式下最大距离2000米。 不同的介质间通过耦合器连接
•网关
每个牵引单元有两个网关,但只有指定给主CCU的网关才参与 WTB和MVB通讯。从CCU网关不工作。 网关负责从列车总线(WTB)到车辆总线(MVB)的过程数据编 组和消息数据发送。 网关进行初始化工作,包括“TCN初始化”和“逻辑初始化” (UIC初始化),并提供经计算验证的配置。
动车组网络控制系统-CRH5型动车组网络控制系统

三、RIOM冗余性
为实现冗余功能,RIOM的输出继电器以并联连接。 当一个输出出现故障时,其继电器将被释放。相应功能由冗余 RIOM的输出保证。 最坏的情况可能是当电源故障或MVB接口故障时,在这种情况下, 该RIOM的所有输出继电器均会被释放。同样在这种情况下相应 功能也由冗余RIOM的输出保证。
CRH5型动车组网络控制系统分为WTB(列车总线)和MVB(多功 能车辆总线)两级总线,而MVB总线根据功能性又分为MVB-A信号 总线、MVB-B牵引总线和MVB-C服务设施总线,实现与牵引、制动 、空调、塞拉门等各个子系统之间的通信,另外,在车辆级总线中还 应用CAN总线执行与充电机、卫生间和热轴检测等子系统的通信。
监视器的信息。本车监视器不设冗余。
五、中继器冗余性
只有一个启用,而另一个处于待机模式,并且 可在已启用的一个发生故障时立即自动开启。
六、系统复位程序
尽管系统可以自动地处理大量的故障,但是仍有些故障不 能自动处理,这时可通过使用司机室内的复位按钮对整个 系统进行复位操作。
七、故障对策
TCMS(列车网络控制系统)均有故障自诊断、保存故障信息、 必要的故障自排除及重要故障信息传送到司机监视器和本地监视 器的功能。 通过显示器,乘务员获得与各种列车设备状态相关的信息,并能 通过预置的列表手动排除故障。 可根据故障性质对其实施分类管理,并在司机和/或显示器上提 供必要的故障处理。
每半列车上有三条车辆总线,根据与之相连接的设备执行的宏功能 进行识别:
MVB-A信号线(总线管理程序MPU-LT, MPU-LT冗余) MVB-B牵引线(总线管理程序MPU-LT, MPU-LT冗余) MVB-C舒适线(总线管理程序MPU-LC, MPU-LC冗余) 每条多功能车辆总线上至少有2个总线管理程序。
CRHA型动车组和CRHA型动车组列车网络控制系统的技术特点
CRH2A型动车组和CRH1A型动车组列车网络控制系统(de)技术特点一、CRH2A型动车组网络控制系统:1、网络控制概述:CRH2动车组列车网络控制系统采用贯穿全车(de)总线来传送信息,从而减轻了列车(de)重量,并且通过对列车运行以及车载设备动作(de)运行信息进行集中管理,可以有效地实现对司机和乘务员(de)辅助作用,加强对设备(de)保养和提高对乘客(de)服务质量.2、网络控制系统(de)组成:CRH2动车组列车网络控制系统由监控器和控制传输部分两部分组成.硬件一体化装置,但各自独立构成网络,系统为自律分散型.控制传输部分为双重系统,确保系统(de)冗余性.通信采用ARCNET网络标准.头车设置(de)中央装置为双重系统构成,确保其可靠性.前后中心(de)控制单元采用母线仲裁.CRH动车组网络控制系统中引用额车载信息装置和类车信息终端装置构成,同时还有监控显示器以及显示控制器、车内信息显示器、IC读卡器等附属设施.3、网络控制系统(de)功能:1)牵引、制动指令传输; 2)设备启动、关闭指令(de)传输;3)显示灯/蜂鸣器控制指令传输;4)乘务员支持信息传输;5)服务设备控制信息传输;6)数据记录功能;7)车上试验;8)自我诊断传送线;9)远程装载功能;10)列车信息装置(de)自我诊断功能;11)信息显示功能.4、网络控制系统(de)拓扑结构:CRH2动车组网络控制系统采用列车和车辆两级网络结构.列车网络为连接编组各车辆(de)通信网络,以列车运行控制为目(de),以光纤和双绞线为传输介质,连接各中央装置和终端装置,采用双重环结构.车辆级网络结构为连接车厢内设备(de)通信网络,主要传输介质为光纤和电流环传输线.1)列车总线列车总线有两种类型:其一为列车信息传输线,以光纤为传输介质,连接所有中央装置和终端装置,采用ARCNET协议,传送速度为s;其二为自我诊断传输网,以双绞线作为传输介质,连接中央装置和终端装置,采用HLC作为通信协议.列车总线(de)设备由中央装置、终端装置、显示器、显示控制装置、IC卡架以及车内信息显示器构成.在光纤网中,中央装置和终端装置由双重环形构成(de)光纤连接,采用不易发生故障(de)双向环形网络方式.它具有向左和向右两条线路,是一种分散型(de)系统.如果在一个方向(de)环绕中检测到没有应答(de)情况,就向另一个方向(de)环绕传送,即使在2处以上(de)线路发生故障,环路网络断开时,也可以继续有其他连接着(de)正常线路进行传送,避开故障部位.2)车辆总线:车辆总线是指中央装置/终端装置与车辆内设备之间信息交换通道.各车(de)中央/终端装置与车辆设备之间(de)接口以光传送、电流环传送,DIO等形式传送,他们构成信息网络节点与车载设备(de)联系通道,车载设备与网络控制系统节点之间爱用点对点通信方式,有多种通信规格,总结如下:终端装置——设备(牵引变流器/制动控制装置)之间(de)传送:①通过点对点连接进行(de)光纤2线式半双工传送;②轮询方式;ATC检查记录部和车内引导显示器、空调显示器、自动播放装置、辅助电源装置—监视器部之间(de)传送.①点对点连接(de)4线式双重传送;②轮询方式;侧面到达显示器-监视器之间(de)传送①通过点对点连接进行(de)2线式单向传送;②轮询方式;5、信息传输及其冗余特性:1)、信息传输路径列车网络控制系统通过贯穿列车(de)光纤双重环形网络及由多股绞合线组成(de)备份传送线传输信息.控制指令传送则采用独立于监视器部分(de)双重CPU方式名具有故障导向安全功能,传输通道包括环形光纤网及备份传送线.两端头车设置有控制传送部和监视器构成(de)中央装置,具有全列车整体信息管理和向司机台显示器传送数据(de)功能,每节车厢分贝设置有一台终端装置,实现车厢车载设别(de)控制和信息传输功能,中央装置与终端装置之间有环形网及备份传送线连接,具有向左和向右两条传输通道,具有较强(de)传输可靠性.2)传输通道冗余性①切换信息系统传输路径,因为传输路径具备向左和向右两个方向,对于控制指令有应答性要求(de)数据,通过两个方向同时传送可实时回避故障点,不会产生信号切换延时,对于其他信息,发送方在无法接收到接收方(de)应答时,可从发送方(de)光传输节点中重获信息,用于其他方向(de)通道传输信息以避开故障点;②中央装置内部(de)控制传输部切换,控制传输部1系、2系采用双CPU结构,运行时有内部冗余措施,1故障时使用2(de)数据;③备份传送:备份传送线为独立结构,正常运行时对数传送系统实现监视,一旦光纤网络发生故障,可不通过光传输系统实现控制传输部之间数据通信.二、CRH1A型动车组网络控制系统:1、网络控制系统概述TCMS(Train Control Management System)是CRH1上分布式计算机网络控制系统.列车在运行过程中,可通过TCMS传输各种信息或控制命令,从而实现对列车各主要设备(de)控制和监管.2、TCMS(de)组成:TCMS网络构架基于TCN标准(IEC65-1)系统主要包括:1)智能设备及其相应列车控制应用软件2)接口硬件装置,用于把TCMS连接到列车上(de)其他系统3)列车网络总线,用于将不同(de)硬件装置连成列车控制系统3、TCMS(de)网络拓扑结构:根据对CRH1(de)列车基本单元(de)划分,整个列车控制管理系统在网络通信上也分为三段MVB总线区段:TUB1段、TUB2段和TUB3段.基本(de)本地控制及监控在每个TBU(de)MVB区段进行.对于TBU和TBU2段,MVB区段控制和监控范围为两动一拖,3个MVB区段之间(de)所有通信通过列车总线(WTB)进行(de).网关作为两总线之间不同物理介质和不同通信协议(de)转换接口,还能起到WTB节点自动配置(de)作用.在MVB区段内部,TC CCU是控制和监控功能(de)核心.由TC CCU控制和监视所有模块(如列车诊断、制冷空调、充电机等).综合起来就是一些对TC CCU 输入或从TC CCU输出(de)模块,由于这些模块本身具有完整(de)控制作用,即具有智能,所以可以看做是能I/O.致谢智能I/O由TC CCU来激活、关闭.MVB区段并不是完全孤立(de),基本(de)司机操作控制功能、高压(网侧)控制功能在列车两端(de)Mc车之间可互为冗余,该功能是通过列车内部贯穿整车(de)冗余MVB 总线来实现(de).当处于工作状态(de)司机室发生故障时,列车不会停止下来,司机(de)操作通过冗余总线由另一个司机室(de)控制设备自动接管,此时司机可以在屏幕上看到故障情况,但不影响列车运行.挂在Tb车MVB总线上(de)远程模块AXS CCU可以通过GSM建立与地面之间(de)通信通道,贯穿整车(de)以太网为乘务员提供列车维护、服务等方面(de)通信与接口.值得注意(de)是本地MVB种还有一个功能独立(de)重要系统,就是牵引控制系统,这个系统又自称一个独立(de)牵引MVB总线,对其下(de)单元,如牵引控制单元、制动控制单元、模拟输入/输出单元、数字输入/输出单元等,按分布式总线控制(de)方式实施控制与监视.4、TCMS(de)MITRAC网络控制设备CRH1动车组(de)网络控制系统基于MITRAC系统.MITRAV计算机系统是由庞巴迪公司为动车和轻轨车设计(de)通用计算机系统,该系统是哟中分布式(de)计算机控制系统,控制单元可位于被监视设备(de)附近.1)中央控制单元中央控制单元(de)硬件是处理器VCU-Lite,配置如下:①Motorola 68040处理器.②VCU-Lite供电:直接蓄电池供电,内置(de)DC/DC变化器能够支持多种蓄电池配置.③MVB通信介质.④MVB服务端口:可以讲编程器或者电筒用一条MVB电缆,通过对MVB服务端口直接连接到VCU-Lite上,对VCU-Lite进行编程或者测试.⑤专用(de)RS-485串口.VCU-Lite配置两个专用(de)RS485(de)串行通道COM3和COM4,COM3可以用于半双工通信,COM4可用于全双工通信,⑥RS-232串口,使用时需有终端电缆,电缆(de)RJ12端连接到VCU-Lite(de)X8上,另一端连接到PC机(de)串口上.⑦以太网,主要用于提哦啊是、下载应用程序及其开发.2)网关:列车总线WTB网关是多功能车辆总线MVB和列车总线WTB之间不同物理介质和不同协议(de)转换接口.网关在两种总线(de)通信协议之间进行数据(de)管理、分析和过滤.网关能够支持强、弱主机(de)概念,也能在列车编组改变(de)时自动标志、配置列车总线上(de)激活节点.网关包括2个MVB连接、2个冗余WTB连接、一个带EEPROM(de)地址编程插头和EEPROM内存.网关中含有每个动车组项目特备指定(de)应用软件,在CRH1车组中,制定了网关应用软件.网关应用软件(de)作用是建立起不同物理层上采用不同通信协议(de)MVB和WTB总线之间(de)互联,网关可操纵、分析和过滤两种总线之间(de)数据传输.网关(de)主要功能由标准(de)软件和固件来实现,CRH1(de)网关应用软件与通过WTB(de)不同数据报文数量有关,如:主机到从机报文.从机到主机报文,当列车编组改变或者强弱主机功能切换时,在WTB上市别和配置节点(de)功能也由网关实现.3)GSMR远程访问控制单元(AXS)AXS远程访问单元用于列车上(de)TCMS和地面站点之间(de)无线通信.4)COMC通信控制器:COMC是实现MVB与 RS485、RS232总线之间(de)通信转换(de)设备.总结:以上即CRH2A型动车组和CRH1A型动车组列车网络控制系统(de)介绍思考题:1、动力分散方式与黏着利用(de)关系动力分散方式(de)粘着较为稳定,一是因动轴数量多,每轴(de)牵引力可以比较低,即使粘着系数较低也不受影响;二是因中间车可有效利用稳定(de)粘着特性.采用动力分散式当路面湿润时,头车虽然容易发生空转,但中间车可充分利用粘着,所以,整列车几乎不受影响2、16辆编组(de)京沪高速列车采用14M2T(de)黏着利用优点是什么中间车可有效利用稳定(de)粘着特性.采用动力分散式当路面湿润时,头车虽然容易发生空转,但中间车可充分利用粘着,所以,整列车几乎不受影响。
CRH5列车网络控制系统

I/O NON I/O NON Red. Red.
网关1故障
I/O NON Red.
I/O Red.
2
I/O NON
Red.
网关1故障
二、 MPU冗余性
• MPU的冗余类型为热备冗余。两个MPU均 可管理其MVB总线(单条或多条)。它们 读取相同的输入,并执行相同的任务。 在故障情况下一个会自动接替另一个。 同一总线上的所有设备均由同一MPU发送 指令。 • 当MPU1故障时,MPU2替代了MPU1作为 MVB“1”和MVB“2”线上的主控制器。
四、 MPU-LT, MPU-LC
• MPU(Main Processing Unit,主处理单 元),负责对相应车辆输出指令和控制。 • 在每一车组中(4辆车)有2对MPU。其中 的2个(MPU-LT)控制牵引和信号设备总 线上的所有设备,而另外2个(MPU-LC) 则控制车内设施和CAN总线上的所有设备。 • MPU功能任务周期可认为不超过100 ms (目标值为50 ms)。
Remote I/O Modules (BT panel) 远程 I/O模块(BT面板)
CLT:
EXT. DOORS
GW:
External Doors外部门
Gateway WTB/MVB 网关 WTB/MVB
TCU:
TD:
Traction Control Unit 牵引控制单元
Driver’s Diagnostic display 司机诊断显示器
• 人机接口设备:
–司机室主监视器 –司机室诊断监视器 –本地监视器(在列车长室) –控制杆、开关、按钮、灯 –位于低压配电柜和司机台上的低压零部件 (继电器、二极管…)。
• 与原型车SM3的改变之处:
CRH380BL型动车组列车网络控制系统解读
KLIP站
(2) 软件所实现的功能
系统 • • • • • • • • • • 正常运行 运行方向设定 牵引设定值处理 TCU及冷却装置监控 自动速度控制 紧急制动指令 常用全制动及停放制动指令 自动速度控制 全列撒砂指令 监测紧急制动阀 受电弓、主断、车顶高压线路 分离开关控制 主变压器冷却装置监控 紧急运行
⑥诊断与报警的方式
SKS报故障(如火灾报警)
子系统的故障诊断信号(如制动系统) CCU故障诊断(如高压系统故障)
⑤诊断系统的协议数据
代码开始 9001 9100 9201 53C1 代码结束 90FF 9108 9297 53D3 代码范围 9000~90FF 9100~91FF 9200~92FF 53C0~53DF 合计 代码所属系统 CCU 协议数据 BCU协议数据 MMI 协议数据 特殊协议数据 代码统计(种) 242 8 72 10 332
CRH380BL型动车组
列车网络控制系统
一、总体情况
1.CRH380BL型动车组列车网络控制系统的特点 采用TCN两级总线,满足IEC61375标准;
列车级总线为 WTB ,车辆级总线为MVB;
实时性强、可靠性高; 总线和重要设备完全冗余; 采用模块化设计,产品通用性强,易扩展; 故障诊断功能强大;
②诊断监视范围
主电流系统 牵引系统 车载辅助电源、充电机 加热、通风、空调 照明 火灾报警 安全环路 人机接口MMI 厕所卫生系统 制动系统 供风系统 齿轮箱,转向架
CCU
车门 旅客信息系统 ETCS列控系统 数据记录DR
③诊断与报警的分类 • 面向司机的诊断和报警信息
与列车运行相关的诊断和报警信息都会向司机显示。
紧急牵引 禁止外部供电 禁止AC冗余供电连接
列车网络控制系统

随着高铁技术的不断发展, CR400AF列车网络控制系统在高 铁领域的应用前景非常广阔
02
同时,CR400AF列车网络控制系 统还可以应用于其他交通领域, 如地铁、轻轨等,推动交通行业 的智能化发展
01
未来,该系统将不断升级和完善, 提高系统的可靠性和安全性,降 低故障率,为高铁列车的安全、 稳定运行提供更加有力的保障
20xx
CR400AF列车网 络控制系统
-
1
CR400AF列车网络控制系统概述
2
CR400AF列车网络控制系统的组成
3
CR400AF列车网络控制系统的功能
4
CR400AF列车网络控制系统的特点
5
பைடு நூலகம்
CR400AF列车网络控制系统的应用前景
CHAPTER 1
CR400AF列车网络控制系统 概述
CR400AF列车网络控制系统概述
CHAPTER 4
CR400AF列车网络控制系统 的特点
CR400AF列车网络控制系统的特点
CR400AF列车网络控制系统具有以下特点
高可靠性:采用冗余设计和故障容 错技术,确保系统在恶劣环境下稳 定运行
高安全性:采用加密技术和访问控 制机制,确保系统数据的安全性和 保密性
兼容性:兼容多种设备和传感器 接口,方便系统的扩展和维护
包括操作系统、应用程序 等,负责控制系统的运行
和管理
人机界面
包括显示屏、控制面板等, 用于显示列车状态和操作
控制
CHAPTER 3
CR400AF列车网络控制系统 的功能
CR400AF列车网络控制系统的功能
CR400AF列车网络控制系统具有以下功能
监控功能:实时监测列车的各项参数,如速度、位 置、温度等,确保列车正常运行 控制功能:根据列车状态和操作指令,控制列车的 各项功能,如牵引、制动、灯光等 诊断功能:对列车故障进行诊断和记录,为维修提 供依据 保护功能:在列车出现异常时,采取保护措施,确 保乘客安全 远程监控功能:通过网络与地面控制中心连接,实 现远程监控和控制
动车组网络控制系统概述

五、中继器冗余性
只有一个启用,而另一个处于待机模式,并且 可在已启用的一个发生故障时立即自动开启。
六、系统复位程序
尽管系统可以自动地处理大量的故障,但是仍有些故障不 能自动处理,这时可通过使用司机室内的复位按钮对整个 系统进行复位操作。
七、故障对策
TCMS(列车网络控制系统)均有故障自诊断、保存故障信息、 必要的故障自排除及重要故障信息传送到司机监视器和本地监视 器的功能。 通过显示器,乘务员获得与各种列车设备状态相关的信息,并能 通过预置的列表手动排除故障。 可根据故障性质对其实施分类管理,并在司机和/或显示器上提 供必要的故障处理。
23:28:39
四、监视器冗余性
(一)驾驶台监视器冗余性 TS和TD互为冗余。当二者之一出现故障时,司机可以通过屏幕 周围的按键选择作用模式(TS或TD),以便从另一个监视器上 获取所有画面及信息。 此监视器的冗余性不是自动实现的,需要司机干预。
(二)本地监视器冗余性
由于车辆的诊断数据保存在MPU内存中,在本地监 视器出现故障时,可以使用驾驶台的监视器获得故障
二、 中继器
中继器是一种主要为硬件的专用设备,用于扩展 MVB在长度和节点方面的容量。事实上,通过中继 器连接的MVB总线的两个不同区段在MPU层次上 看来只是一个有32+32个节点、200+200米长的一 条MVB总线。中继器引起的数据传输延时非常微小。
三、监视器
(一)司机台监视器 驾驶台上有2个分别名为TS和TD的监视器。 监视器为彩色TFT显示器。 屏幕尺寸为10.4英寸,其分辨率为800 x 600(SVGA)。 监视器带有加热器和风扇,可在低和高环境温度下使用。 监视器具备“节电”模式功能,可以延长寿命。 监视器所使用的语言为中文。
1.3 列车网络控制系统概述.ppt
一、列车网络控制系统的功能
1.3 列车网络控制系统概述
• 5、车门管理
• 车门管理采用CAN总线作为设备内部管理,并通过RIOM与MVB进行信 息连接。
MVB
RIOM 1
RIOM 2
DCU 9
DCU 7
DCU 5
DCU 3 DCU 1
DCU 10
DCU 8
DCU 6
DCU 4
DCU 2
CAN OPEN
中压 负载
远程中压总线
中压 电池充 负载 电器
本地中压总线
备用低压总线
低压
ACE
低压
低压
电池充
110VDC
负载
负载
电器
电池
低压
电池充 110VDC
低压
负载
电器
电池
负载
永久低压总线
A(Tc)车配有1台静态逆变器和1个电池充电器,B(Mp)车则配有1块蓄电池,C(M)
车配有1个电池充电器和1块蓄电池。中低压电源通过ACE由TCMS进行管理,ACE控制与检测 城轨车信辆网息络控链制接系统于MVB总线上。
1.3 列车网络控制系统概述
C
B
A
ATC DDU MPU RIOMs
HVB(高压总线) 列车线
MVB(多功能列车总线)
一、列车网络控制系统的功能
• 7、照明管理
列 车 照 明 在 司 机 模 式 中 , 由 ELCS
点亮应急照明;在无人驾驶模式中,
A
一旦ATC激活一个司机室,则应急照 明点亮。一旦司机室开始工作,由司 机控制台上的开关(在司机模式中) 来控制正常照明。司机室则由2个开
目标的单元控制机、实现车辆控制的车辆控制机和实现信息交换的通信
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录列车网络控制系统 (2)一、列车网络控制系统概述 (2)1. 列车网络系统的发展 (2)2. 列车网络控制系统的功能 (4)二、我国城市轨道交通列车网络控制系统的应用 (5)1. SIBAS系统 (5)2. MITRAC.系统 (6)3. AGATE系统 (9)4. TIS信息系统 (13)5. DETECS系统 (15)列车网络控制系统一、列车网络控制系统概述列车网络控制系统是列车的核心部件,它包括以实现各功能控制为目标的单元控制机、实现车辆控制的车辆控制机和实现信息交换的通信网络。
列车网络系统的发展过程从系统功能来看经历了由单一的牵引控制到车辆(列车)控制,再到现在已经进入分布式控制系统的发展阶段。
1. 列车网络系统的发展70年代末至80年代初,车载微机的雏形分别在西门子公司和BBC公司出现。
开始仅仅是用于传动装置的控制,随着控制、服务对象的增多,人们把铁道系统依次划分为 6 个层次:公司管理、铁路运营、列车控制、机车车辆控制、传动控制和过程驱动,于是列车通信网络在初期的串行通信总线的基础上应运而生,并从原来不同公司的企业标准推向国际标准,逐步形成了列车通信与控制系统的标准化、模块化的硬件系列和全方位的开发、调试、维护、管理软件工具。
1988年IEC第9 技术委员会TC9成立了第22工作组WG22,其任务是制订一个开放的通信系统,从而使得各种铁道机车车辆能够相互联挂,车上的可编程电子设备能够互换。
1992年6 月, TC9WG22以委员会草案CD(committee Draft)的形式向各国发出列车通信网TCN(Train Communication Network)的征求意见稿。
该稿分成4个部分:第1 部分总体结构,第 2 部分实时协议,第 3 部分多功能车辆总线MVB,第4部分绞式列车总线WTB。
总体结构把列车通信网规定为由多功能车辆总线MVB和绞式列车总线WTB 组成。
MVB的传输介质可以是双绞线,也可以是光纤。
在后一种场合,其跨距为2000m,最多可连接256个职能总线站。
数据划分为过程数据、消息数据和监管数据。
对过程数据的传输作了优化。
发送的基本周期是lms或2ms。
WTB的传输介质为双绞线,最多可连接32个节点,总线跨距860m。
WTB 具有列车初运行和接触处防氧化功能。
发送的基本周期是25ms。
1994年5 月至1995年9 月,欧洲铁路研究所(ERRI)耗资300万美元,在瑞士的Interlaken至荷兰的阿姆斯特丹的区段,对由瑞士SBB、德国DB、意大利FS、荷兰NS的车辆编组成的运营试验列车进行了全面的TCN试验。
1999年6 月,TCN标准草案正式成为国际标准,即IEC61735。
该标准对列车通信网络的总体结构、连接各车辆的列车总线、连接车辆内部各智能设备的车辆总线及过程数据等内容进行了详细的规定。
列车通信网络的标准化对目前和将来的开发设计提供了一个良好的基础,现已交付或投入运营的采用TCN的车辆达600辆以上,装备TCN的车辆数量正在迅速增长,Adtranz、Firema、Siemens 等车辆制造工厂的所有新项目均以TCN为基础。
我国列车通信网络的发展可以追溯到1991年,株洲电力机车研究所在购买ABB公司的牵引控制系统开发工具特别是软件开发工具的基础上,联合路内高被开发出了建国第一套力机车微机控制装置,安装于SS40038 电力机车上。
在该装置中,系统被明确划分为人机界面显示级、机车控制级和传动控制级三级,级与级之间通过串行总线连接,形成了二级总线的雏形。
其中连接司机台显示器与机车控制级之间的显示总线在“春城”号动力分散电动车组上扩展为贯穿列车连接各动力车的机车控制级与司机台显示器的列车显示总线:连接机车控制级与传动控制级的近程控制器总线在“先锋”号动力分散交流传动电动车组上扩展为连接动力车节点与传动控制单元和ATP的中程控制器总线。
近年来,国内机车车辆工业发展迅速,相继开发成功了动车组、200公里高速车等产品,以及目前尚处于开发研制阶段的摆式列车、轻轨车等产品。
这些产品需要对列车的运行状况和故障做出快速准确的判断和处理,而传统的机车车辆控制技术已不能满足这方面的要求。
同时,随着电子技术的飞速发展,应用于车辆上的智能设备也越来越多,如集中轴报、电动塞拉门、电子防滑器、电空制动、信息显示等系统都装在K型车上。
这些系统需要配备大量的控制线路,且有的系统自成一个小型网络,使一个车辆有多种网络存在,各系统间的数据不能共享,信号重复检测。
为解决上述存在的问题,引入列车通信网络技术将全列车的智能用电设备连接起来,达到数据共享是非常必要的。
90年代中期,随着动车组在我国升温,对列车通信网络特别是机车的重联控制通信的需求十分迫切。
一方面,铁道部开展了列车通信网络研究课题,另一方面路内外许多单位也先后自发地开展了自我开发、联合开发或技术引进工作,这些工作主线局域网、现场总线、TCN、通信介质、基于RS485的通信协议等领域展开。
如:上海铁道大学与株洲电力机车研究所合作开发的基于ARCNET的列车总线和基于HDLC的车辆总线的列车通信网络的研究;上海铁道大学用CAN作为连接司机台和列车控制单元的局部总线的研究;国防科技大学用CAN作为磁悬浮列车的列车总线的研究;西南交通大学用RS485+议作为摆式列车倾摆特制总线的研究;北方交通大学对通信介质及其转换的研究;大同机车厂对列车通信网结构及其协议的研究和对BITBUS的研究;株洲电力机车研究所的基于FSK的列车通信的研究,基于RS485+协议的局部总线的研究,基于Lonworks的列车总线和局部总线的研究,CAN总线用于列车监控装置和摆式列车局部控制总线的研究,基于ModBus的I/O局部总线的研究,MVB、WTB的研究等以及国产化的MVB产品与其他公司的MVB产品的兼容性试验;四方机车车辆研究所、铁道科学研究院、西南交通大学、武进市剑湖铁路客车附件厂、武汉正远公司等对Lonworks、MVB、WTB进行了研究。
购买了或准备购买Lonworks、MVB、WTB的开发工具。
以上这些研究,有一些成果得到了应用,其中,“新曙光”号是首列采用Lonworks列车总线技术的内燃动车组。
在该项目中,Lonworks列车总线网卡插在成熟的内燃机车微机控制装置EXP机箱中。
首尾动力车的重联通信通过Lonworks列车总线以显式报文方式实现,而EXP机箱内的主CPU通过机箱背部的并行FE总线访问网卡上的双口RAM实现信息交换。
“神州”号Lonworks 列车重联通信与此类似,但采用了二路,即设置了一路Lonworks冗余通道。
“先锋”号是首列采用了株洲电力机车研究所的TEC列车通信与控制系统的动力分散交流传动电动车组。
在该项目中,每节动车或拖车上都有一个列车总线节点,列车总线贯穿全列车连接各个节点。
在每节动车或拖车内,各智能控制设备通过MVB或控制器总线与节点交换信息。
在司机台显示器上可以选择查看全列车各个设备的状态。
“中原之星”号是第二列采用TEC技术的动力分散交流传动电动车组。
该项目与“先锋“号项目的主要区别是采用了MVB光缆连接一个车组单元内三节车的所有智能控制设备(大部分布置在车辆的地板底下)。
而整列车仅设置了2个列车总线节点,即每个车组单元只设置1个列车总线节点。
从而从列车总线往下着,好象整个列车是由 2 个基本运转单元构成,简化了控制信号在列车总线上的传递。
另外,“中原之星”号的车辆总线、列车总线、列车控制单元、某些重要设备的数字输入/输出通通(如继电器)等采取了冗余措施。
“'新曙光”号、“神州”号列车重联通信的成功,特别是“先锋”号、“中原之星”号的较为完备的列车通信与控制系统的成功,标志着我国列车通信与控制系统的发展已经进入实用化的新阶段。
2. 列车网络控制系统的功能列车网络控制系统的功能主要包括:实现牵引控制,即牵引特性曲线的实现和牵引功能的优化;实现列车牵引黏着控制,使列车在各种运用条件下,都能保持轮轨间的牵引力,并尽可能地使机车运用在轮轨间的牵引力实现最大化;实现并联和电路的连接,即逻辑控制功能;以及实现列车运行过程中的故障信息处理,即进行故障信息的采集、处理、传输、显示和记录,并为列车乘务提供故障的现场处理和排除信息的提示。
还提供列车运行的状态信息。
二、我国城市轨道交通列车网络控制系统的应用1. SIBAS系统SIBAS系统是德国Siemens公司提供的列车控制系统,能够实现列车牵引系统控制、信息传输、运行监控和诊断等全部控制任务。
SIBAS系统目前有SIBAS-16和SIBAS-32两个系列,主要运用到我国早期的西门子进口城市轨道交通地铁车辆中,如上海地铁1、2号线车辆使用的SIBAS-16控制系统;广州地铁1号线车辆使用的SIBAS-32控制系统。
SIBAS-16是典型的第一代微机控制系统,核心部件有16位的8086型未处理器构成的中央计算机、存储器组件以及一个或多个控制机(8088,80C188)组成。
该系统采用集中式机箱和插件式机械结构,控制系统由中央控制器集中管理,采用分层结构,即列车控制层。
机车控制层和传动层。
采用多个串行总线系统,在传输速度和运行记录方面能满足列车控制的影响要求。
SIBAS-16本质上还不能算是一个分布式的列车网络控制系统。
SIBAS-16的编程工具为SIBASL0G,系统提供大量的标准的程序模块,为控制软件的编程提供了有利的条件。
20世纪90年代,Siemens公司在SIBAS-16的基础上进一步采用32位芯片(Intel486)的SIBAS-32系统,并保持与SIBAS-16系统的接口兼容。
为了减少传统机车车辆布线,SIBAS-32系统设有智能外围设备连接终端,即SIBAS KLIP站。
采用SIBAS KLIP可以迅速综合信息和控制指令,并且通过一根串行总线传输给中央控制装置。
KLIP站可以很自由地分布在各类车辆上。
2. MITRAC.系统MITRAC系统是Bombardier(庞巴迪)公司的系列产品,包括MITRAC TC(牵引逆变器) 、MITRAC CC(列车控制系统)、MITRAC AU(辅助逆变器)MITRAC DR (牵引驱动器)。
公司为了适应不同用户,推出了MITRAC500系、1000系、3000系。
500主要用于城际有轨列车,1000系主要用于高速及地铁列车,3000系主要用于大功率机车。
在广州地铁2号线、深圳地铁1号线一期庞巴迪地铁车辆中就使用了该系统。
MITRAC CC主要特点:1)符合各国际标准(EN50155车辆上的电子设备标准;ENV50121-3-2:铁路应用电磁兼容性的标准;ENV50204:数字无线电话电磁场辐射标准;IEC61375-1:列车通信网络标准;IEEE1473:1999中关于列车通信协议标准;UIC556/557 列车中信息传输的诊断标准),具有开放接口。