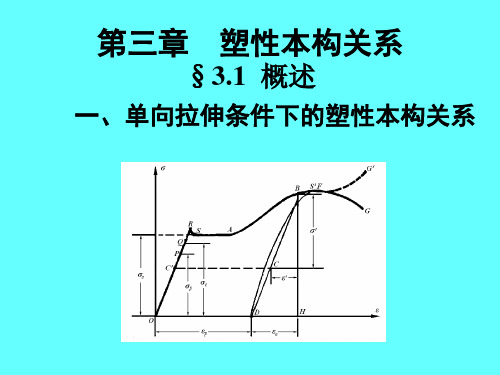
塑性力学第三章
塑性力学课件 第三章
2
(a)
' Oσ 2 其长度 同理, 同理 AB 在π平面上的方向平行于 平面上的方向平行于 ,
为:
2 A′B′ = σ 2 (b) 3 ' BP 在π平面上的方向平行于 Oσ 3,其长度为 其长度为:
ห้องสมุดไป่ตู้
§3.3 应力空间与屈服曲面
一、应力空间的概念
把六个应力分量看成六维空间的坐标, 把六个应力分量看成六维空间的坐标,则 每一应力状态就相当于六维空间中的一个点。 每一应力状态就相当于六维空间中的一个点 。 称这个六维空间为六维应力空间。 称这个六维空间为六维应力空间 。 屈服条件 ( 3—1)式就是六维应力空间中的一个超曲面 ) 为了区别于普通三维空间中的曲面, ( 为了区别于普通三维空间中的曲面 , 称为超 曲面) 曲面)。
假定材料各向同性,则屈服条件为: 假定材料各向同性,则屈服条件为: f( σ 1 , σ 2 , σ 3)= C (3—2) ( ) f是σ 1 , σ 2 , σ 3 的对称函数(即三个主应力 的对称函数( 是 可以互换位置而函数值不变) 可以互换位置而函数值不变)。 的对称函数,所以, 而 I1 , I 2 , I 都是 σ 1 , σ 2 , σ 3 的对称函数,所以, 3 I 1 , I的对称形式的函 可以把屈服条件写成 2 , I3 屈服条件又可表示为: 数,即屈服条件又可表示为: ) f2( I1 , I 2 , I 3 )= C (3—3)
1 (σx+σy+σz)= 3
1 (σ1+σ2+σ3)=0 3
即 π平面上的任意点所代表的应力状 平面上的任意点所代表的应力状 其球张量为零, 态 其球张量为零 , 这个应力状态本身就是 一个偏张量。 一个偏张量。
岩土弹塑性力学教学课件(共13章)第3章_应变状态
§3.1 应变状态11
• 三个刚性转动分量及6个应变分量合在一起,才全 面反映了物体变形
xyz x y z xy yz zx
B
B’’ 刚性转动
B’’’
B’
变形
A 刚性平动 A`
§3.1 应变状态12
• 工程应变: ln l0
l0
变形后长度 原始长度
不适用于大变形
• 自然应变/对数应变:
在塑性变形较大时,用-曲线不能真正代表加载和变形的状态。
x y z
• ——弹性体一点的体积改变量
• 引入体积应变有助于简化公式。
• 大于零表示体积膨胀,小于零体积压缩。
• 注意:土力学中塑性体应变符号约定相反。
§3.2 主应变与应变主方向8
应变Lode参数: 为表征偏量应变张量的形式,引入应变Lode参数:
22 3 1 3
1
(1.66)
如果两种应变状态με 相等,表明它们所对应的应变莫尔圆 相似,也即偏应变张量的形式相同。
Vz y
;
zx
Vz x
Vx z
;
§3.3 应变率张量 2
小变形情况下,应变速率分量与应变分量间存在如下关系:
x
Vx x
du x dt
d dt
u x
x
u x
y
Vy y
dv y dt
d v
dt
y
y
v y
z
Vz z
z
dw dt
d w dt z
z
w z
线应变速率
j
Vj,i )
(1.56)
§3.3 主应变与应变主方向 4
由于时间度量的绝对值对塑性规律没有影响,因
弹塑性力学课件第三章

zx C61x C62 y C63z C64 xy C65 yz C66 zx
C ij
ijkl kl
Cijkl Cijlk
2021/1/10
4
第三章 本构关系
一、线性弹性体的本构方程——具有一个弹性对称面的线
性弹性体
x
y
C11
C12 C22
C13 C23
C14 C24
2021/1/10
10
第三章 本构关系
一、线性弹性体的本构方程——各向同性弹性体
x
1 E
x
( y
z ) ,
xy
1 G
xy
y
1 E
y
( x
z ) ,
yz
1 G
yz
z
1 E
z
( x
y ) ,
zx
1 G
zx
ij 1Eij Ekkij
2021/1/10
11
第三章 本构关系 一、线性弹性体的本构方程——各向同性弹性体
0 x
0
y
z xy
C33 0 0
对
C44 0
0 z
0
xy
yz
zx
称
C55
0 C66
yz zx
2021/1/10
6
第三章 本构关系 一、线性弹性体的本构方程——正交各向异性弹性体
x y z xy
1 Ex
xy
1 Ey
对
xz
yz
弹塑性力学课件第三章
第三章 本构关系
本章学习要点:
掌握各项同性材料的广义Hooke定律 掌握弹性应变能密度函数的概念及计算 理解初始屈服、后继屈服以及加卸载的概 念 掌握几个常用的屈服条件 理解弹塑性材料的增量和全量本构关系的 基本概念
塑性力学-第三章
(12)
称为 ij 的第一、第二和第三不变量。因为它们与坐标系
的选择无关。
可以证明 有三个实根(可参考弹塑性力学的习题与例题, 清华徐秉业编),这里不证。将 ij 的主值记为 1、 2 和 3 , 且规定 1 2 3。 (12)式也可用主值来表示:
I 2 ( 1 2 2 3 3 1 ) I 3 1 2 3 I1 1 2 3
1 1 3 2 1 2 2 2 3 2 1 3 2 2
1 1 3 2 J 2 1 1 3 2 4 3
得证
J 2 是很重要的参数,用它可定义一些重要的参量。
如定义等效应变
z
T ν
用张量方式来描述,Cauchy公式可以写作
Ti ij j
(i, j 1,2,3)
(6)
(6)式可以用来描述应力边界条件
在连续介质中应用Newton第二定律(或动量守恒定 律),可以得到应力张量满足的运动方程 ij, j Fi i (i, j 1,2,3) (7)
1 1 2 2 2 2 2 2 ij ij 11 22 33 12 23 31 2 2
(17)
证明
J2
2 2 2 11 22 33 2 11 22 33 211 22 22 33 3311 0
j ij i ij ij j 0
于是,可以写出统一的公式
ij
ij j 0
(10)
式中 是 ij 的主值。若 ij代表应力张量, 是主应力。 若 ij 代表应变张量, 是主应变。
塑性力学-塑性本构关系
第三章塑性本构关系全量和增量理论•全量理论(形变理论):在塑性状态下仍有应力和应变之间的关系。
Il’yushin(伊柳辛)理论。
•增量理论(流动理论):在塑性状态下是塑性应变增量和应力及应力增量之间的关系。
Levy-Mises理论和Prandtl-Reuss理论。
3-5 全量理论的适用范围简单加载定律变形:小变形加载:简单加载适用范围:物体内每一点应力的各个应力分量,在加载过程中成比例增长简单加载:()0ij ijt σασ=0ijσ非零的参考应力状态()t α随着加载单调增长加载时物体内应力和应变特点:应力和应变的主方向都保持不变应力和应变的主分量成比例增长应力Lode参数和应力Lode角保持常数应力点的轨迹在应力空间是直线小变形前提下,判断简单加载的条件:荷载按比例增长(包括体力);零位移边界材料不可压缩应力强度和应变强度幂函数关系m i iA σε=实际应用:满足荷载比例增长和零位移边界条件3-6 卸载定律卸载:按照单一曲线假设,应力强度减小•外载荷减小,应力水平降低•塑性变形发展,应力重分布,局部应力强度降低简单卸载定律:•各点的应力分量按比例减少•不发生新的塑性变形¾以卸载时的荷载改变量为假想荷载,按弹性计算得到应力和应变的改变量¾卸载前的应力和应变减去卸载过程中的改变量塑性本构关系的基本要素•初始屈服条件–判断弹性或者塑性区•后继屈服条件–描述材料硬化特性,内变量演化•流动法则–应变增量和应力以及应力增量之间的关系,包括方向和分配关系Saint-Venant(1870):应变增量和应力张量主轴重合•继承这个方向关系•提出分配关系()0ij ij d d S d ελλ=≥应变增量分量和应力偏量分量成比例Levy-Mises 流动法则(M. Levy,1871 & Von Mises,1913)适用范围:刚塑性材料3-7 流动法则--Levy-Mises & Prandtl-Reuss。
塑性力学第三章
•
弹性应变增量偏张量与应力增量偏张量成线 性关系: dee 1 dS ij ij 2G
且:
e deij deijp deij
•
1 dSij d Sij 所以有:deij 2G
3 塑性本构关系_3.7
Levy-Mises 流动 法则和Prandtl-Reuss流动法则
Prandtl-Reuss(普兰特-雷斯)流动法则
3 塑性本构关系_3.7
Levy-Mises 流动 法则和Prandtl-Reuss流动法则
Prandtl-Reuss(普兰特-雷斯)流动法则
•
(1)1924年,L.Prandtl将Levy-Mises关系 式推广应用于塑性平面应变问题。
---(i):考虑塑性状态下的弹性变形部 分,并认为弹性变形服从Hooke定律。
---(ii):假定塑性应变增量张量和应力 偏张量相似且同轴线。
3 塑性本构关系_3.7
Levy-Mises 流动 法则和Prandtl-Reuss流动法则
Prandtl-Reuss(普兰特-雷斯)流动法则
•
(2)1930年,A.Reuss把L.Prandtl应用在 平面应变的这个假设推广到一般三维问题。
边界条件:
•
按位移求解和按应力求解。
•在弹性和塑性交界处还要满足连续条件。
3 塑性本构关系_3.5
•
•
全量理论的适用 范围简单加载定律
全量理论适用于: (1)小变形+(2)简单加载
简单加载:在加载过程中物体内每一点的各个应力分 量按比例增长的。即在简单加载时,各应力分量与一个 共同的参数成比例,即:
3 塑性本构关系_3.2
达为:
广义Hooke定律
考博弹塑性力学,第三章

h/2 h/2
M
x
y
l ( l >>h)
第三章
平面问题的直角坐标解答
本题属于平面应力问题,且为单连体, Φ 若按 Φ 求解, 应满足相容方程及 S = Sσ 上的应力边界条件。 求解步骤: ⑴ 由逆解法得出,可取 Φ = ay ,且满足 4 ∇ Φ=0 ⑵ 求出应力分量 σ x = 6ay, σ y = τ xy = 0 (a)
3Ah 3Ah
o
3Ah
h/2 h/2 l 3Ah (a)
x
y
第三章
平面问题的直角坐标解答
(2)对于坐标轴不同,可以解决不同的问 题。对于图(b)所示的坐标系,可解决矩形截 面梁的偏心受拉问题;对于图(c)所示的坐标 系,则可解决偏心受压问题。
o h 6Ah y l (b) 6Ah y x 6Ah o h l (c) x 6Ah
3
第三章
平面问题的直角坐标解答
⑶ 检验应力边界条件,原则是: a.先校核主要边界(大边界),必须 精确满足应力边界条件。 b.后校核次要边界(小边界),若不 能精确满足应力边界条件,则应用圣维南 原理,用积分的应力边界条件代替。
第三章
平面问题的直角坐标解答
对于主要边界 y = ± h / 2
(σ y ) y=± h/2 = 0, (τ xy ) y =± h / 2 = 0
(a)
( lσ
x
+ mτ xy ) = f x ,
S
( lτ
xy
+ mσ y ) = f y
S
(b )
⑶ 多连体中的位移单值条件。
(c)
第三章
平面问题的直角坐标解答
对于单连体,(c)是自动满足的。只 须满足条件(a)和(b)。 由 Φ 求应力分量的公式:
弹塑性力学第三章

b
y
b
x
图 3-1b
§ 3-1
多项式解答
♦ 同理,应力函数
cy 2
c 0
O
能解决矩形板在 x 方向受 均布拉力(设 c> 0 )或均 布压力 (设 c < 0 ) 的问 题,图3-1c 。
2
2 2Φ 12kxy Φ x 2 3 y 2 0 y h x 2Φ 6ky 2 3k 3 xy xy h 2h
O l y
h x
(2)边界条件:
上下边界
y y h 2
0
2
xy y h 2
h 6k 3k 2 0 3 h 2h
y
图 3-1 a
§ 3-1
多项式解答
可见,应力函数 ax 能
2
2a
O
解决矩形板在y方向受均布 拉力(设a > 0)或均布压 力(设a < 0)的问题。
2a
y 图 3-1a
x
§ 3-1
多项式解答
(2) bxy
b 0
b b
O
x 0, y 0, xy yx b
12 M x 3 y, y 0, xy yx 0 代入式(a),得: h
M x y, y 0, xy yx 0 I 结果与材料力学中完全相同。 对于长度l 远大于深度h 的梁,上面答案 是有实用价值的;对于长度l与深度h 同等大 小的所谓深梁,这个解答是不准确的。
塑性力学课件 第三章 屈服条件
理想塑性材料:进入塑性阶段以后,在应 力空间中代表应力状态的点均位于屈服曲面 f(σij)= C上。由于没有强化现象,应力状态 变化时,尽管塑性变形还可以不断增长,而屈 服函数的值却不再增长。即不可能有df>0的情 况出现。代表应力状态的点只能在屈服面上移 动,这时有df = 0,属于加载;当代表应力状态 的点移向屈服面以内时,df<0,属于卸载。即 df<0,卸载 (3—34) df = 0,加载 由实验结果得知,加载及中性变载时产生 新的塑性变形,卸载及时不产生新的塑性变形, 其各应力分量与各应变分量的改变服从弹性规 律。
§3.5 Mises屈服条件
Tresca屈服条件完全忽视了居于中间大 小的主应力对材料屈服的影响,这是和实际 有出入的。 Mises用Tresca屈服条件的屈服轨迹正六 边形ABCDEF的外接园作为屈服轨迹。 2 由(3—23)式知圆的半径为 σs,
3
2 2 圆的方程为: R2 = s 3
(3—25)
简单加载定理:对小变形的受力物体,满足 下列三个条件即可保证物体内所有各点都处于简 单加载(充分条件): (1)物体上所有外加荷载(包括表面力和体 积力)成比例增长。如有位移边界条件,只能是 零位移边界条件; (2)应力强度和应变强度呈幂关系 i A in ; 1 (3)材料不可压缩,即泊松比μ= 。
S
s
2
二、各主应力不按大小顺序排列时的 Tresca屈服条件 (3—16)可改写为: σmax-σmin =σs (3—19) (3—19)等价于下式中至少有一个式子成立: 1 3 s 0 0 3 s 1 1 2 s 0 (3—20) 1 2 s 0 2 3 s 0 2 3 s 0
塑性力学第三章

简单拉伸时的塑性现象 初始屈服条件和初始屈服面 Tresca条件和Mises条件 Tresca条件和Mises条件的实验验
后继屈服条件及加、卸载准则 几种硬化模型 Drucker公设
§3-1
简单拉伸时的塑性现象
一、单拉实验 1、初始屈服点、初始屈服 初始弹性阶段的界限所对应的点——初 始屈服点。材料由初始弹性阶段进入塑性的 过程就称为初始屈服。 2、后继屈服点、后继屈服 材料进入塑性阶段后卸载,然后重新加 载至继续发生新的塑性变形时材料的再度屈 服称为后继屈服,相应的屈服点称为后继屈 服点。
12
2
10
7
6
§3-3 Tresca条件和Mises条件 一、Tresca条件 当最大剪应力达到材料的某一定值时, 材料就开始屈服,进入塑性状态。表示为 max k 当 1 2 3 时可写作
max 1 3
2 k , 1 3 2k
45 这与单拉时滑移线与轴线大致成 ,以及
即:
f ij 0 f ij 0
, n dσ 0 , n dσ 0
对于像Tresca屈服面,由几个光滑屈服面构 成的非光滑屈服面,在光滑屈服面处的加卸 载准则同上式。但在光滑屈服面的交界处的 加卸载准则为: 应力点处在屈服面上,即 f l ij f m ij 0
静水应力不影响屈服的事实相符。
在一般情况下,主应力的次序是未知的,这 时,Tresca屈服条件应表示为: 1 2 2k 2 3 2k 3 1 2k 上式中至少一个等式成立时,材料就开 始屈服,进入塑性变形。 在三维应力空间中, 1 2 2k 是一对与 偏量平面 的法线以及 3 轴平行的平面。因 此,按上式所建立的屈服面是由三对互相平
塑性力学第三章
5)平面应力条件下的情形
平面应力条件下总有一个主应力为零 设
σ1
σ3 = 0
σ 1 − σ 2 = ±2kT ⎫ ⎪ σ 2 = ±2kT ⎬ ⎪ σ 1 = ±2kT ⎭
折线所围区域为弹性应力 区域 为应力状态空间屈服 面与坐标面之交
3)加载准则
外荷载的改变引起材料内部各点应力和应变的改变
已知一点处应力改变 需要判断属于加载或卸载
dσ ij
1)
F (σ ij , κ ) = 0
⎧> 0 ⎪ F (σ ij + dσ ij , κ ) = ⎨= 0 ⎪< 0 ⎩
加载 中性变载 卸载
注意
∂F F (σ ij + dσ ij , κ ) = F (σ ij , κ ) + dσ ij + o(dσ ij )2 ∂σ ij
初始屈服条件
f (σ ij ) = 0
后继屈服条件
F (σ ij , κ ) = 0
或
F (σ ij , αij , κ ) = 0
κ , αij
F (σ ij , αij , κ )
— 与应变历史有关的硬化变量 — 加载函数
2)硬化模型
等向硬化
初始屈服 后继屈服
单向应力状态
σ
σs
f (σ ) =| σ | − σ s = 0
σ z /σs
§3.4 后继屈服与硬化模型
1)后继屈服条件的概念
单向拉伸的情况下,当材料进入塑性状态卸载后再 重新进行加载时,拉伸应力和应变的变化仍服从弹性 关系,直至应力到达前次卸载前的最高应力点时,材 料才再次进入 塑性状态,产生新的塑性 变形.这个应力点就是材 料在经历了塑性变形后的 新的屈服点.由于材料的 硬化特性,它比初始屈服 点为高.
弹塑性力学第三章
(1)11=k(x12+x22) x3 , 22=kx22x3 , 33=0
12=2k x1 x2 x3, 23= 13=0
2020/1/23
32
作业:
(2) 11=k(x12+x22) , 22=kx22 , 33=0, 12=2kx1x2, 23= 13=0
2x32222x22332x222x33
22
u2 x2
33
u3 x3
23
1(u3 2 x2
u2 x3
)
2020/1/23
24
§3-5 变形协调条件(相容条件)
2x12332x32112x233x11
33
u3 x3
2020/1/23
17
§3-3 应变张量和转动张量的坐 标变换式
在 xk 坐标系中,已知变形体内任一点应ij和 ’ij 均可以通
过二阶张量的坐标转换式求出它们。
即:
' ij
Qi'kQ
j'l
kl
i'j Qi'kQ j'l kl
2020/1/23
4
§3-1 位移和(工程)应变
工程应变共有六个分量:
三个正应变,正应变以伸长为正,
三个剪应变,剪应变以使直角变小为正。
x3
dx1
dx2
x3
dx3 P
x1
2020/1/23
x2
22dx2
P x1
x2
23
5
§3-2 应变张量和转动张量
应变张量和转动张量是描述一点变形 和刚体转动的两个非常重要的物理量,本 节将讨论一下它们与位移之间关系,在讨 论之前,先介绍一下相对位移矢量和张量.
弹塑性力学第三章 应力与应变讲解

式中:n和s分别为微分面的法线和切线方向的单位 矢量。全应力和应力分量之间有
n pn n
n pn s
pn2
2 n
(3.3)
研究具体问题时,总是在一个可以选定坐标系里进 行。对给定的直角坐标系,全应力还可以沿坐标系 方向进行分解。
p 的单位法向量,它与三个坐标轴之间的夹角余弦为 l1、l2、l3
则该主平面上的应力矢量 n 可表示为
pn n (3.14)
或
px py
l1 l2
(3.15)
pz
l3
式中: 表示主应力
将应力分量表达式(3.7)代入上式,经移项并整理后得
(
x
)l1
设给定的坐标系Oxyz下,某点M的应力张量为
ij yxx
xy y
xz yz
zx zy z
现让该坐标系原点不动,坐标轴任意旋转一个角度而得 到新坐标系Ox’y’z’,新旧坐标关系如下表:
x
y
z
X’ l11 cos(x ', x) l12 cos(x ', y) l13 cos(x ', z)
要使主方向存在,也即要使方程组(3.17)或(3 .18)有 非零解,则其系数行列式必须为零。
x yx zx
xy y
zy
xz yz 0 z
(3.19a)
方程组(3.19)也可以写成
det ij ij 0
(3.19b)
式(3.19)展开后,得
对面)上有9个应力分量。这9个应力分量的整
塑性力学第三章
(1)有一个判断材料是处于弹性阶段还是 已进入塑性阶段的判断式,即屈服条件; (2)应力与应变之间是非线性关系; (3)应力与应变之间不存在弹性阶段那样 的单值关系。
§3-2
初始屈服条件和初始屈服曲面
一、屈服条件 1、初始屈服条件 物体内一点开始出现塑性变形时其应力 状态所应满足的条件。 一般情况下,应力状态由6个独立的应 力分量确定,不能简单地取某一个应力分量 作为判断是否开始屈服的标准,且这6个分 量还和坐标轴的选择有关。材料是否进入塑 性状态和材料性质及应力(应变)状态有关。 表示为: f (σ ij ) = 0
一、Lode实验 1926年Lode用钢、铜、镍作成的薄壁管 加轴向拉力和内压进行实验(这时主应力方 向不变),得到的结论是Mises条件与实验 结果符合较好。 二、Taylor和Quinney实验 Taylor和Quinney在1931年用铜、铝、 钢作成的薄壁管在轴向拉力和扭矩共同作用 下进行实验(这时主应力方向可以改变), 得到的结论仍然是Mises条件与实验结果符 合较好。
§3-1 §3-2 §3-3 §3-4 证 §3-5 §3-6 §3-7
简单拉伸时的塑性现象 初始屈服条件和初始屈服面 Tresca条件和Mises条件 Tresca条件和Mises条件的实验验 后继屈服条件及加、卸载准则 几种硬化模型 Drucker公设
§3-1
简单拉伸时的塑性现象
一、单拉实验 1、初始屈服点、初始屈服 初始弹性阶段的界限所对应的点——初 始屈服点。材料由初始弹性阶段进入塑性的 过程就称为初始屈服。 2、后继屈服点、后继屈服 材料进入塑性阶段后卸载,然后重新加 载至继续发生新的塑性变形时材料的再度屈 服称为后继屈服,相应的屈服点称为后继屈 服点。
当荷载增加时,如果物体内每点的应力张量 各分量均按比例增加,即 μσ 值保持不变, 从而使应力张量的主方向保持不变,这种加 载方式即简单加载或比例加载。 在复杂加载时,一点的应力张量各分量 不按比例增加,μσ 值在改变,应力张量和应 力偏张量的主方向也随之改变。 和弹性阶段不同,塑性的变形规律即本 构关系应具有以下几个重要的特点: