motoman机器人正反解及其仿真分析
机器人运动学正解逆解 ppt课件

C1(C23a44
S1S5C6
S1S5S6
S1C5
C2a33C2a2)
S1C (C 1S253SC465C6S23S46)
S2 3C45C6
S1(C23C45C6S23C46)
C1S5S6 S23C45C6C23C46
S1(C23S45)
C1C5 S2 3S45
S1(C23a44 S23C a442a33S2C a332a2S )2a2
S2
0
C2 0
0
S2a2
1 0
0
0
0
1
C3 S3 0 C3a3
A3
S3
0
C3 0
0
S3a3
1 0
0 0 0 1
C4 0 S4 C4a4
A4
S4
0
0 1
C4 0
S4a4
0
0 0 0 1
C5 0 S5 0
A5
S
5
0
0 1
C5 0
0
0
0
0
0
1
C6 S6 0 0
A6
S
2
arctan(C3a3 (C3a3
a2 )( pz S234a4 ) S3a3( pxC1 py S1 a2 )( pxC1 py S1 C234a4 ) S3a3( pz
C234a4 ) S234a4 )
进而可得:
4 234 2 3
再 根 据 对 应 项 元 素 相 , 等 可 以 得 到
学习重点:1. 给关节指定参考坐标系 2. 制定D-H参数表 3. 利用参数表计算转移矩阵
2
精品资料
• 你怎么称呼老师? • 如果老师最后没有总结一节课的重点的难点,你
【论文】七自由度工业机器人运动学逆解分析及仿真

摘要机器人技术已成为高技术领域内具有代表性的战略性技术之一,它使得传统的工业生产面貌发生巨大的变化,对社会的发展产生深远影响。
机器人运动学是机器人技术重要的组成部分,机器人运动学逆问题的求解是机器人轨迹规划、位置控制和离线编程的主要步骤之一。
本文主要介绍了我国工业机器人的发展以及工业机器人运动学的研究现状,对位姿变换、坐标变换等运动学分析的基础知识进行了简单的描述。
本文通过对Motoman-V A1400型七自由度机器人的结构分析,利用D-H方法建立机器人坐标系简图,确定各关节连杆参数,并在运动学正解的基础上,利用反变换矩阵的方法进行了运动学逆解的计算。
本文简单介绍了虚拟样机技术的概念和应用,虚拟样机技术平台ADAMS软件及其基本模块。
本文最后利用UG对机器人进行三维建模,并导入ADAMS中进行逆运动学的分析及仿真,在已知末端轨迹的情况下,绘出各关节的运动状态曲线,得到仿真结果。
机器人逆运动学研究所取得的任何突破性的进展都将对机器人技术产生重要的影响。
关键词:七自由度,逆运动学,仿真ABSTRACTRobotic technology has become one of representative strategic technology in high-tech field. It makes the traditional industrial production have undergone tremendous changes and have a profound impact on social development. Kinematics is an important part of robotics, and the solution of the robot inverse kinematics is one of the main steps of robot trajectory planning, position control and off-line programming.This article introduces the development of industrial robots and industrial robots research of kinematics, and gives a simple description on the position and orientation transformation, coordinate transformation, kinematics analysis and other basic knowledge. This article analyses the structure of the seven degrees of freedom robot Motoman-V A1400, then establishes the robot coordinate system diagram by D-H method to determine the link parameters of each joint, and the calculations of inverse kinematics by inverse transform matrix method on the basis of kinematics. Then, the article briefly introduces the concept of virtual prototyping technology and applications, virtual prototyping platform, ADAMS, and its basic modules. Finally, the robot using 3D modeling of UG, and in the case of the known end of the track, analyses and simulates the inverse kinematics into ADAMS, draw the simulation results that the state of motion of each joint curves.The progress achieved any breakthrough of inverse kinematics will have a major impact on robotics technology.Key Word: 7 DOF, inverse kinematics, simulation目录摘 要 (I)ABSTRACT (II)第一章 绪论 (1)1.1 工业机器人的发展 (1)1.2 工业机器人运动学研究现状 (2)1.3 虚拟样机技术的应用 (3)1.4 课题来源及选题意义 (4)1.5 本文的主要研究内容 (6)第二章 机器人空间描述与坐标变换矩阵 (7)2.1 MOTOMAN-VA1400机器人简介 (7)2.2 MOTOMAN-VA1400机器人空间描述 (8)2.2.1 机器人坐标系的建立 (8)2.2.2 机器人连杆参数的确定 (10)2.3 MOTOMAN-VA1400机器人坐标变换矩阵 (11)2.3.1 机器人齐次坐标变换 (11)2.3.2 机器人坐标变换矩阵的求解 (12)2.4 本章小结 (15)第三章 机器人逆运动学求解 (17)3.1 逆运动学求解方案的选择 (17)3.2 逆运动学方程最优解的选取 (17)3.3 逆运动学方程的求解过程 (18)3.4 逆运动学求解结果 (21)3.5 本章小结 (25)第四章运动学仿真与分析 (26)4.1 ADAMS基本模块简介 (26)4.2 ADAMS模型仿真 (27)4.2.1 机器人的几何建模 (27)4.2.2 ADAMS环境下生成虚拟样机 (29)4.2.3 样机的约束添加和参数设置 (29)4.2.4 仿真与结果的输出 (32)4.3 仿真结果分析 (34)4.4 本章小结 (36)第五章结论与展望 (37)5.1 结论 (37)5.2 技术经济分析 (37)5.2.1 技术可行性分析 (37)5.2.2 经济优越性分析 (37)5.3 对进一步研究的展望 (38)参考文献 (39)致谢 (41)附录 (42)第一章绪论1.1 工业机器人的发展机器人是一种可编程,通用,有操作和移动能力的自动化机械。
串联机器人运动学分析、结构优化设计及仿真研究-----Motoman hp6
关键词:六自由度串联机器人 多目标优化 机构优化设计 模态分析 离线编程
仿真系统
ABSTRACT
Nowadays, various production industries have an increasing demand for industrial robots. Although the government has made a big investment in research of industrial robots over the years, the effect is not obvious. The R&D on universal and key technology of about industrial robots is the lifeblood of the development of China's industrial robots. The primary aim of this article is to provide a comprehensive study on the optimal design of kinematics, dynamics, structural and interactive offline programming of Motoman hp6 industrial robot. (1) Based on the discussion of kinematic characteristics of the Motoman hp6 robot and the forward and inverse solution method, the kinematics forward and inverse solution is obtained. Furthermore, the application of multi-objective genetic algorithm in optimization of inverse kinematics is investigated to get the optimal solution of inverse kinematics on the condition of satisfying the constraints. (2) This paper also studies the structure and transmission of the serial robot, then establishes the virtual prototype model of the Motoman hp6 robot. The dynamics between each joint is analyzed when serial robot moves from one point to another point, meanwhile, the structure of the main components of the robot is studied with finite element analysis, then the structure will be improved based on the analysis results. The machine modal of the serial robot is analyzed and the structure of the serial robot is then improved based on the variation of the modal shape. (3) Finally, the offline programming system which integrates the kinematics forward and inverse solution, trajectory interpolation, teaching playback and graphic display module is presented. Meanwhile, the robot offline programming system is also constructed under the environment of Visual C++6.0 and Opengl, which possesses the characteristics of high integration, fast speed, strong visibility and good human-computer interaction interface. The above research results make it richer of the theory of universal and key technology of serial robot, especially the theory of inverse kinematics, optimization design of mechanism and Offline programming simulation system of robot. KEY WORDS: 6-DOF serial robot, Multi-objective optimization, Optimization design of mechanism, Modal analysis, Offline programming simulation system
遥操作系统中MOTOMAN-SV3X机器人的运动建模研究
Cui Jianwei Song Aiguo Huan Weiyi
(Department of Instument Science and TechnoIogy,Southeast University,Nanjing 210096,China)
第 33 卷第 4 期
东 南 大 学 学 报( 自 然 科 学 版 )
VoI.33 No.4
2003 年 7 月
JOURNAL OF SOUTHEAST UNIVERSITY(NaturaI Science Edition)
JuIy 2003
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
4)转动关节的连杆变量!i 与其转轴 Zi 之间符合右手定则,Zi 轴的正方向规定为:垂直向上、向右或 垂直于纸面指向观察者 . 这样,当从 Z 轴的正向看!i 角时,它的正向也符合逆时针为正的习惯 .
如上所述,由于规定了机器人的基础坐标系、工具坐标系的位置和方向以及关节变量的正方向,使得 直接参与机器人控制的关节变量和观察方向符合人们的习惯而且有统一的定义,并能反映出机器人的运 动学全貌,便于直接移植到不同的使用条件中 . 满足此规定并用 D-H 法建立的模型便会有通用性 . 图 l 表 示了满足以上规定且用 D-H 法建立的 MOTOMAN SV3X 坐标系 . MOTOMAN SV3X 是一个六自由度机器 人,它的 6 个关节均为转动关节,各个关节变量为:!l ,!2 ,!3 ,!4 ,!5 ,!6 . !"# MOTOMAN SV3X 机器人的广义变换矩阵
解释机器人运动学方程的正解和逆解

解释机器人运动学方程的正解和逆解
机器人运动学方程是研究机器人运动规律的一种数学工具。
机器人运动由位置、速度和加速度三部分组成,而机器人运动学方程便是描述这三部分关系的方程。
机器人运动学方程分为正解和逆解。
正解是指根据机器人关节角度、长度等参数,推导出机器人末端执行器的位置、速度和加速度等运动学参数的过程。
在机器人运动学分析中,正解一般使用解析法、几何法和向量法等方法。
通常我们会在正解中借助三角函数和向量函数,对机械臂的运动主体进行数学建模,推导出机器人最终执行器的位置和末端的速度、加速度等参数,完成机器人运动学方程的正解。
而逆解则是指在已知机器人末端执行器的位置、速度和加速度等参数的基础上,求出机器人关节角度,这样机器人才能达到需要执行的动作。
逆解是机器人指令控制中的核心技术之一,一般采用数值计算的方法来求解。
逆解方法有直接法和迭代法两种,直接法一般应用于计算复杂的工业机器人,而迭代法则更适用于机场搬运、医疗康复等关节数较少的应用场景。
机器人运动学方程的正解和逆解都涉及高等数学和工程数学的知识,需要对机器人的运动学规律有一定的理解和掌握。
随着人工智能和机器人技术的不断发展,机器人运动学方程的应用将得到更广泛的推广和应用,成为未来机器人研究和应用的重要工具。
HP20机器人的运动学逆解计算及模拟仿真
HP20机器人的运动学逆解计算及模拟仿真
张刚;黄海波
【期刊名称】《轻工机械》
【年(卷),期】2011(029)006
【摘要】根据Motoman-HP20型机器人的结构特点,利用DH方法建立了其运动学方程,并推导出了运动学逆解.将所求得的运动学逆解编写成Matlab程序,计算了末端执行器在正弦曲线轨迹下各个关节角度变化曲线.建立HP20型机器人的多体动力学虚拟样机,将曲线导入驱动虚拟样机,得到模型的运动轨迹.通过对比,目标曲线与运动轨迹吻合良好,验证了运动学逆解及程序的正确性.研究结果为研究在特定工况下,机械臂的运动学、动力学及电机扭矩特性打下了基础.
【总页数】6页(P40-45)
【作者】张刚;黄海波
【作者单位】宁波大学机械工程与力学学院,浙江宁波315211;宁波大学机械工程与力学学院,浙江宁波315211
【正文语种】中文
【中图分类】TP242.2
【相关文献】
1.基于旋量和臂形标志的机器人运动学逆解计算 [J], 王卫忠;赵杰;吕常青;蔡鹤皋
2.基于MATLAB的HP20机器人运动学分析与仿真 [J], 张新敏;朱学军;赵晨晨;陈官
3.移摆送料机器人的运动学逆解研究 [J], 张乾; 曲一兵; 昃向博
4.基于布谷鸟算法和牛顿法组合算法的6R机器人运动学逆解 [J], 赵瑜
5.可重构机器人封闭形式的运动学逆解计算 [J], 赵杰;王卫忠;蔡鹤皋
因版权原因,仅展示原文概要,查看原文内容请购买。
Motoman工业机器人有限元静态分析及改进设计
Fi ie e e e ts a i n l s s a e i n i pr v m e n t l m n t tc a a y i nd d s g m o e nt
f r m o o a nd s r a o o 0 l t m n i u t i lr b t
ig i ei ,b tas a e t r l n n r ya d rd c d t ec s. n n t a u lo s v d ma e i sa de eg n e u e h o t a
合金 材料并作 相应结构改进后 , 机器 人的最大等效应力 、 应变均 比改进前有所减小 ’ 最大位移和改进前 相 比,
基 本 保 持 不变 , 满 足 Moo n工 业 机 器 人 用 于 焊 接 、 漆 等 较 轻 载 荷 工 况 下 的基 本 性 能 . 种 改 进 设 计 不 能 tma 喷 这 仅 可 以减 轻 工 业机 器人 的本 体 重 量 , 提高 机器 人 的 动态 特 性 , 小机 器 人 的 运 动 惯量 , 能 节 约 材 料 , 约 能 减 还 节 源 , 低成本. 降 关 键 词 ; tma 业 机 器 人 ; 限元 静 态 分 析 ; 进设 计 Moo n工 有 改
XI AO Hi o g Z — n ,DUAN in z o g,DU n qa g,LIJa y Ja - h n Xi— in in
( c o lo e h nc lE g n e ig, n xa Un v r i Yi c u n 7 0 2 , h n ) S h o fM c a ia n i e rn Ni g i i e st y, n h a 5 0 1 C i a
机器人运动学反解-完整PPT课件

反解就是已知手爪位姿求关节变量。
正解
nx ox ax px
04T
ny
nz 0
oy oz 0
ay az 0
p
y
pz 1
01T (1) 21T (2 ) 23T (3 ) 34T
反解
反变换法是一种把关节变量分离出来从而求解的方法,也称 代数法。
c1 0 s1 0
01T
4.1.4 运动学反解的有关问题
一、解的存在性和工作空间 容易求得
x y
l1c1 l1s1
l2c12 l2s12
两自由度平面机械手
通常把反解存在的区域(如圆环)称为该机器人的工作空间。 严格地讲,工作空间分为两种:(1)灵活(工作)空间,是指机器 人手爪能以任意方位到达的目标点集合; (2)可达(工作)空间, 是指机器人手爪至少能以一个方位到达的目标点集合。
式中正,负号对应着θ3 的两种可能解。
最后求θ2: 将 pz a3s23 d4c23 a2s2 展开并整理得:
pz (a3c3 a2 d4s3)s2 (a3s3 d4c3 )c2
同样再利用三角代换容易求得θ2的四种可能解:
2 A tan 2( pz ,
k
2 x
k
2 y
pz2
)
d
c2 2
4 23
2a3a2 s23 s2
2d4a2c23s2
2a3d 4 s23c23
合并同类项并整理得:
2a2a3c3 2a2d4s3 px2 py2 pz2 d22 a32 a22 d42
令
k
( px2
py2
pz2
a22
a32
d22
机器人运动学正解逆解课件

在机器人力控制中,需要知道每个关节的角度变化来调整 机器人的姿态和力矩。逆解可以用于求解每个关节的角度 变化,从而调整机器人的姿态和力矩。
机器人定位
在机器人定位中,需要知道每个关节的角度变化来调整机 器人的位置和姿态。逆解可以用于求解每个关节的角度变 化,从而调整机器人的位置和姿态。
04
实现复杂运动轨迹
利用运动学正解与逆解,可以规划出 复杂的运动轨迹,满足各种应用需求 。
02
机器人运动学正解
正解的基本概念
正解是指机器人末端执行器从某一初 始位置和姿态到达目标位置和姿态所 需经过的关节角度值。
正解是机器人运动学中的基本问题, 是实现机器人精确控制和自主导航的 基础。
正解的求解方法
逆解的求解方法
01
代数法
通过建立机器人关节角度与目标点坐标之间的方程组,利用数学软件求
解方程组得到关节角度。这种方法适用于简单的机器人结构,但对于复
杂机器人结构求解过程可能较为繁琐。
02
数值法
通过迭代或搜索的方法,不断逼近目标点坐标,最终得到满足要求的关
节角度。这种方法适用于复杂机器人结构,但求解时间较长且可能存在
机器人运动学正解逆解课件
目 录
• 机器人运动学概述 • 机器人运动学正解 • 机器人运动学逆解 • 机器人运动学正逆解的对比与联系 • 机器人运动学正逆解的实例分析
01
机器人运动学概述
定义与分类
定义
机器人运动学是研究机器人末端 执行器位姿与关节变量之间的关 系的学科。
分类
根据机器人的结构和运动特性, 可以分为串联机器人和并联机器 人。
局部最优解。
03
解析法
通过几何学和代数学的方法,直接求解关节角度与目标点坐标之间的关
基于BP网络的MOTOMAN机器人运动学逆解研究
基于BP网络的MOTOMAN机器人运动学逆解研究
张培艳;吕恬生;宋立博
【期刊名称】《机电工程》
【年(卷),期】2003(020)002
【摘要】探讨了BP网络在MOTOMAN机器人运动学逆解中的应用.利用正解的结果作为训练样本,通过逐次训练6个输入节点、2个隐层、单输出节点的BP网络得到机器人从工作空间到关节空间的非线性映射,从而实现运动学逆解计算.
【总页数】4页(P56-59)
【作者】张培艳;吕恬生;宋立博
【作者单位】上海交通大学,机械工程学院,上海,200030;上海交通大学,机械工程学院,上海,200030;上海交通大学,机械工程学院,上海,200030
【正文语种】中文
【中图分类】TP242;TP183
【相关文献】
1.基于BP神经网络的机器人运动学逆解新算法 [J], 余光群
2.基于BP网络的尾焦收集机器人运动学逆解算法分析 [J], 李欧阳;朱石沙;李国栋
3.基于RBF神经网络的MOTOMAN-UPJ型机器人运动学逆解 [J], 陈平;刘国海
4.基于BP网络判据的工业机器人运动学逆解 [J], 奚陶;张海鸥;王桂兰;芮道满
5.Motoman机器人的运动学建模及基于BP网络的IKP研究 [J], 刘鹏飞;韩九强;马健梅
因版权原因,仅展示原文概要,查看原文内容请购买。
Motoman—UP20机器人运动学分析及求解
wrs e a aen s t d i s d t n lz h n e s i e tc ft e rbo 。 nd i e s ie ais a t its p r t e s meho s u e o a ay et e iv re k n ma iso h o t a nv r e kn m t r hmei bo tt e c i tc a u h
,
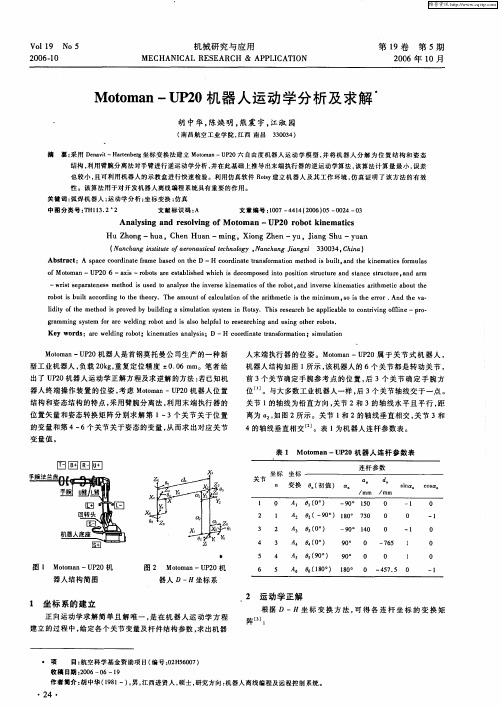
胡 中华 。 陈焕明 。 熊震 宇 。 江淑 园
( 昌航 空 工 业 学 院 , 南 江西 南 昌 3 03 ) 30 4
摘
要 : 用 D nvt atneg坐标 变换 法 建 立 Mo m n 采 e ai—H r br e t a —UP0六 自由度 机 器 人 运 动 学模 型 , 将 机 器 人 分 解 为 位 置 结 构 和 姿 态 o 2 并 结构 , 用 臂 腕 分 离 法 对 手臂 进 行 逆 运 动 学 分 析 , 在 此 基 础 上 推 导 出末 端 执 行 器 的 逆 运 动学 算 法 , 算 法 计 算 量 最 小 , 差 利 并 该 误 也较 小 , 可利 用 机 器 人 的示 教 盒进 行 快 速 检 验 。利 用仿 真 软 件 R t 且 o y建 立 机 器 人 及 其 工 作 环境 , 真 证 明 了 该方 法 的 有 效 s 仿 性 。 该 算法 用 于对 开 发 机 器 人 离线 编程 系统 具 有 重 要 的作 用 。
Ab ta t s r c :A pa e c o dnaefa eba e n t — H o r i t r n f r ain meto sb l. nd te kie aisfr l s s c o r i t rm s d o heD c o dnae ta som t o h d i uita h n m t o mu a c o oo n — U12 一a i rbos ae e tb ihe ih i e mp s d i t sto tu t r nd sa c tu t e. nd a m fM tma >06 xs— o t r sa ls d whc s d co o e n opo iin sr c u e a tn e sr cur a r
基于RBF神经网络的MOTOMAN—UPJ型机器人运动学逆解

A e h d f r S li g I v re Ki e t so 0T0M AN —UPJ M t o o o vn n e s n ma c fM i —
M a i u ao s d o np l tr Ba e n RBF Newo k t r
C HEN P n . L U o a ig I Gu h i
Ab ta t src :Ap rp it o riaeo po r ec odn t f a MOT OMA —U Jrb t np ltr setbih db s g D n vt N P oo ma iuao sa l e yu i e ai —Hatn egmeh d, wa s n re b r to
(col f lc cyadIfr t nE g er g J ns nvri , hni gJ ns 10 3 C ia Sho o et i n no i ni e n , i guU iesy Z ejn i gu22 1 , hn ) E rt i mao n i a t a a
c n eg n e t h ew r . o v r e c t e BP n t o k o
Ke wo d : MOT MAN —UP n iuao ;I vre kn mais y rs O Jma p ltr n es ie t ;RB ewok c F n t r
O 前言 机器人运动学描述了机器人关 节与组成 机器人 的
仿真 。R F ( ai ai F nt n 网络是一 种局 B R da B s u co ) l s i 部逼近网络 ,网络在逼近能力 、分类能力和学 习速度 等方面均优于 B P网络 ] 。文 献 [ ] 中,作 者使 4
行 了计算仿真 . 验证 了该方法 的可行性 。与传 统解 析法 相 比,大大减 少 了求 解运 动方 程的计 算量 。与 B P神 经网络 相 比, 加快 了收敛速度 , 解决 了实时 性 的问题 。 差
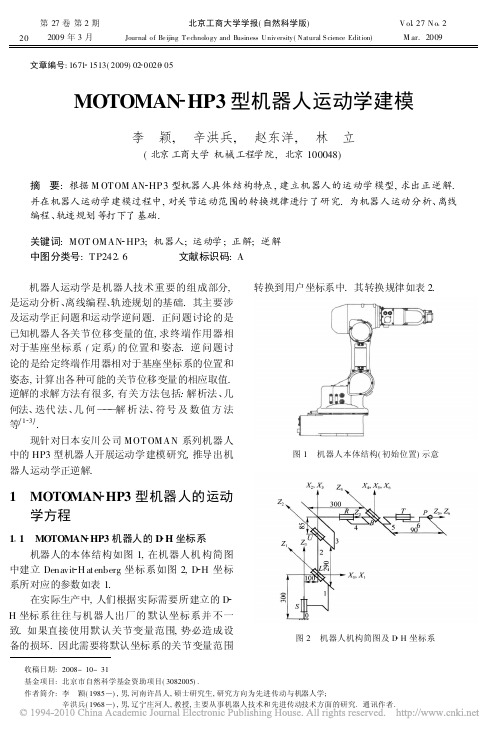
MOTOMAN_HP3型机器人运动学建模
第 27 卷 第 2 期
李 颖等: M OT OM A N HP3 型机器人运动学建模
21
杆件编号 i - 1- i
01 12 23 34 45 56
转角
i 1 2 3 4 5 6
扭角 i/ ( ) - 90
转换到用户坐标系中. 其转换规律如表 2.
图 1 机器人本体结构( 初始位置) 示意
1 MOTOMAN HP3 型机器人的运动 学方程
1 1 MOTOMAN HP3 机器人的 D H 坐标系 机器人的本体结构如图 1, 在机器人机 构简图
中建立 Denavit H at enberg 坐标系如图 2, D H 坐标 系所对应的参数如表 1.
右乘
A
6
1
得式( 3)
.
式( 3) 左边:
A3 A4 A5=
c3c4c5- s 3s5 - c3 s4 - c3c4 s5- s3 c5 - s3 S3+ a3c3
s3 c4c5+ c3s5 - s3 s4 - s 3c4s 5+ c3 c5
- s4c5
- c4
s 4s 5
c3 S3+ a3s3 ,
s 1 s2 oy - c 2oz ) s 6,
第 27 卷 第 2 期
李 颖等: M OT OM A N HP3 型机器人运动学建模
23
o∀y = ( - c 1s 2 nx - s1 s2 ny - c 2 nz ) s 6 + ( - c1 s2 ox -
s1 s2 oy - c 2 oz ) c6,
motoman机器人正反解及其仿真分析

Θ1-t图Θ2-t图Θ3-t图Θ4-t图Θ5-t图Θ6-t图理想轨迹仿真轨迹使用matlab计算motoman机器人的正、反解;雅克比并实现仿真(程序如下)%正解反解雅可比clear all;syms thet;syms thet1thet2thet3thet4thet5thet6;syms a1a2a3d4;%正解rotz=[cos(thet) -sin(thet) 0 0;sin(thet) cos(thet) 0 0;0 0 1 0;0 0 0 1];t100=eye(4,4);t210=[1 0 0 a1;0 0 -1 0;0 1 0 0;0 0 0 1];t320=[1 0 0 a2;0 1 0 0;0 0 1 0;0 0 0 1];t430=[1 0 0 a3;0 0 -1 0;0 1 0 0;0 0 0 1];t540=[1 0 0 0 ;0 0 1 0;0 -1 0 0;0 0 0 1];t650=[1 0 0 0;0 0 -1 0;0 1 0 0 ;0 0 0 1];tg0=[1 0 0 0;0 1 0 0 ;0 0 1 d4;0 0 0 1];t10=subs(t100*rotz,thet,thet1);t21=subs(t210*rotz,thet,thet2);t32=subs(t320*rotz,thet,thet3);tg=t430*rotz;t43=subs(tg*tg0,thet,thet4);t54=subs(t540*rotz,thet,thet5);t65=subs(t650*rotz,thet,thet6);t61=t21*t32*t43*t54*t65;t62=t32*t43*t54*t65;t610=t10*t61%反解syms px py pz nx ny nz ox oy oz ax ay az;t60=[nx ox ax px;ny oy ay py;nz oz az pz;0 0 0 1];%求theta1t01=inv(t10);t610=t01*t60;f11=t610(2,4);f12=t61(2,4);%求theta3f311=t610(1,4);f312=t61(1,4);f321=t610(3,4);f322=t61(3,4);%求theta2t30=t10*t21*t32;t03=inv(t30);t631=t03*t60;t632=t43*t54*t65;f211=t631(1,4);f212=t632(1,4);f221=t631(2,4);f222=t632(2,4);%求theta4f411=t631(1,3);f412=t632(1,3);f421=t631(3,3);f422=t632(3,3);%求theta5t40=t10*t21*t32*t43;t04=inv(t40);t641=t04*t60;t642=t54*t65f511=t641(1,3);f512=t642(1,3);f521=t641(3,3);f522=t642(3,3);%求theta6t45=inv(t54);t651=t45*t641;t652=t45*t642;f611=t651(3,1);f612=t652(3,1);f621=t651(1,1);f622=t652(1,1);【注释】此处可用simple命令简化各矩阵。
麦克纳姆轮正逆运动学模型
麦克纳姆轮正逆运动学模型麦克纳姆轮正逆运动学模型麦克纳姆轮正逆运动学模型是一种描述运动系统行为的模型,它将问题的求解分解为两个步骤:正运动学(Forward Kinematics)和逆运动学(Inverse Kinematics)。
正运动学求解的是末端笛卡尔坐标位置,逆运动学求解的是驱动关节的位置角度值。
正运动学(Forward Kinematics)正运动学是一种从末端节点到根部节点的方法,用来计算某个机器人运动系统的末端点位置,即机器人手臂末端的坐标。
正运动学中最核心、最重要的就是建立一组运动学模型,以描述整个机构的结构和运动特性,常用的模型有DH参数模型(Denavit-Hartenberg model)、URDF参数模型等。
逆运动学(Inverse Kinematics)逆运动学是一种从根部到末端节点的方法,用来确定某个行动机构的驱动关节的位置角度值。
逆运动学是基于正运动学模型的,它以机器人末端状态为约束条件,推导出驱动关节的角度值,从而完成末端手臂到末端机器人驱动关节的建模。
常用的迭代算法有 Jacobian算法(Jacobian method)、pseudoinverse算法(pseudo-inverse method)等。
总结麦克纳姆轮正逆运动学模型是一种描述运动系统行为的模型,它将问题求解分解为正运动学(Forward Kinematics)和逆运动学(Inverse Kinematics)两部分。
正运动学用来计算某个机器人运动系统的末端点位置,而逆运动学用来确定某个行动机构的驱动关节的位置角度值。
正运动学需要建立一组运动学模型,而逆运动学则需要迭代算法,如Jacobian算法和pseudoinverse算法。
解释机器人运动学方程的正解和逆解

解释机器人运动学方程的正解和逆解正解与逆解是机器人运动学方程的重要概念,也是机器人学研究中最重要的内容之一。
正解和逆解可以帮助我们建立机器人的空间模型,从而控制机器人的运动状态,为机器人的实际应用提供有力的支持。
本文将对机器人运动学中的正解和逆解的概念及其在机器人学中的应用进行详细剖析。
一、正解与逆解概念介绍正解和逆解是机器人运动学中常用的概念,也是机器人学研究中最重要的内容之一。
正解是指从给定的末端位姿或空间位置确定机器人的轴位置的运算,而逆解则是反之,从给定的关节位置到末端位姿的运算。
因此,机器人运动学中的正解和逆解都是从关节位置到末端位姿和反之的一种运算。
二、正解的求解方法正解的求解方法主要有三种,分别为数值法、解析法和实验法。
(1)数值法数值法是指将从给定末端位姿或空间位置求解机器人轴位置的过程采用数学计算的方法来求解。
这种方法的优点在于可以根据实际情况采用不同的公式来求解,也可以用数值算法来求解机器人的轴位置。
其缺点是计算量大,求解速度慢,无法满足实时性要求。
(2)解析法解析法是指利用数学分析方法,从一整套已知机器人轴位置求解和从末端位姿求机器人轴位置的过程,运用特定的反函数,做单就反函数,解出机器人轴位置。
这种方法计算时间短,可以满足实时性要求,但缺点是所用的反函数不一定准确,容易发生解析法错误。
(3)实验法实验法是指实际应用中,通过针对特定的机器人空间进行实验,来确定机器人轴位置的过程。
这种方法好处在于可以得到准确的机器人轴位置,不受数学计算模型的影响,缺点是计算时间长,不能满足实时性要求。
三、逆解的求解方法逆解的求解方法主要也有三种,分别为数值法、解析法和实验法。
其中,数值法包括逐次迭代法、牛顿迭代法等;解析法包括几何法、角度法等;实验法包括传感器测量法、机器人调试法等。
(1)数值法数值法是通过几何和动力学方面的矩阵求解形式,利用数值计算技术,从给定的关节位置计算机器人构成末端位姿的过程。
【论文】MOTOMAN机器人双机协调下棋系统设计
摘要随着工业化的飞速发展,机器人成为了替代人类手工的首要选择,承担了大部分的繁重工作,由其是在恶劣的,常人无法忍受的工作环境下。
并且它们的工作质量远远高于人类。
在这种在大环境下,对于机器人的研究已经成为了一个热门的话题。
本文主要研究了日本安川MOTOMAN机器人双机协调下棋系统。
利用Visual C++语言完成控制程序的编写,并在PC机上模拟人机做战过程。
本实验中,两台MOTOMAN机器人与计算机之间采用的是网口通信,采用这种通信方式,可以形成一个小的局域网络,通过计算机发送信号给两台机器人。
在棋盘重绘过程中,提取人机双方棋子移动坐标,使机器人能够根据人的棋子移动和计算机博弈算法产生的象棋移动结果实现象棋的正确移动,并对机器人的各种运动位置进行了校正,整个控制程序可以满足下象棋的控制需求,这些工作为进一步进行双机器人实现人-人对战奠定了基础,并为双机器人协调运动的要操作通信方式提供了一个较新颖的思路。
关键词:MOTOMAM机器人,象棋,程序,网口通讯AbstractWith the rapid development of the industry, robot has become the first choice to instead the handful manufacture. They afford the most part of the heavy work, especially in a terrible weather or an unendurable work environment to human. Thus, the study on robot has become a hot topic.This paper mainly researches on the coordinated chessing system by two MOTOMAN robots from YASKAWA Company in Japan. I accomplished the program by Visual C++ language, and simulated the chessing process on the computer. In this experiment, I used net communicate to connect the two robots and the computer. A LAN(local area network) is set up and become a tool to send message to the two robots. The transferring chess coordinate is collected when the chess board is being redrawn. In this way, the computer can find the correct movement of chess according to the last step and the chessing method in the computer and correct all kinds of position. So the whole controlling program can fit the chessing demand. All the work that I have done establishes the foundation of chessing by two robots by two people on a computer and provide a new idea on the way of connect among two robots and a computer.Key words: MOTOMAN robot, Chinese chess, program, communication目录第一章前言 (1)1.1 课题背景 (1)1.2 国内外多机器人协调系统的发展概况 (1)1.3遥操作概况 (4)1.4 本文研究内容、方案及步骤 (5)第二章双机器人协调下棋系统的构建 (6)2.1 MOTOMAN机器人的硬件结构 (6)2.2 MOTOMAN机器人的软件结构 (9)2.3 双机器人协调系统的构建 (10)2.3.1 双机器人中的真、假协调 (10)2.3.2 硬件I/O平台的构建 (10)2.3.3 软件系统设计 (12)2.4 本章小结 (13)第三章通讯模块程序设计 (14)3.1 网口通讯模式设计 (14)3.2 通讯模块程序 (14)3.2.1 通讯程序介绍 (14)3.2.2 通讯模块程序的运行 (16)3.3 程序流程图 (18)3.4 本章小结 (18)第四章对弈模块程序设计 (20)4.1 对弈程序介绍 (20)4.2 对弈过程中相关判断程序介绍 (21)4.2.1 搜索算法的设计 (21)4.2.2 棋子坐标的提取和转换 (22)4.2.3 走棋和吃棋的判断 (23)4.2.4 走棋过程设计 (24)4.3 本章小结 (26)第五章示教程序调试 (27)5.1 示教程序设计 (27)5.1.1.走棋程序设计 (27)5.1.2.吃棋程序设计 (28)5.2 程序名含义清单 (28)5.3 棋子坐标表示 (29)5.4 本章小结 (30)第六章实验结果 (31)6.1 遥操作通讯部分 (31)6.1.1 通讯部分实验 (31)6.1.2 通讯部分实验结果 (32)6.2 整体部分 (32)6.2.1 整体实验 (32)6.2.2 整体实验结果 (33)6.3 本章小结 (34)第七章结论和展望 (35)7.1 结论 (35)7.2 技术经济分析报告 (35)7.2.1 技术可行性分析 (37)7.2.2 经济优越性报告 (37)7.3 对进一步研究的展望 (38)参考文献 (39)致谢 (40)附录1 (41)附录2 (48)声明 (50)第一章前言1.1 课题背景自从20世纪50年代第一台工业机器人面世以来,随着计算机、通信、电子、传感、控制等技术以及人工智能的飞速发展,集多种先进技术为一体的机器人技术在需求的牵引下已经得到了很大的发展。
机器人正反解方法概述
机器人正反解方法概述引言机器人运动学是机器人学的基础,是描述机器人运动过程中,各个关节及末端执行器的变化情况。
它涉及到两个方面的内容:即机器人正运动学和逆运动学。
机器人正运动学是已知机器人的连杆参数和各个关节变量,求解机器人末端执行器的位置和姿态;而机器人逆运动学恰好相反,是已知其末端执行器的位置和姿态,求解机器人的各个关节变量。
因此,求解机器人位置正反解的方法成为机器人设计中重要的内容。
机器人逆运动学比正运动学问题复杂得多,并且随着机器人自由度的增加,对于逆运动学问题的求解会越来越复杂。
由于机器人逆解的准确性以及求解速度的快慢会直接影响机器人的实时控制,因此国内外研究机器人逆解的求解算法比较多。
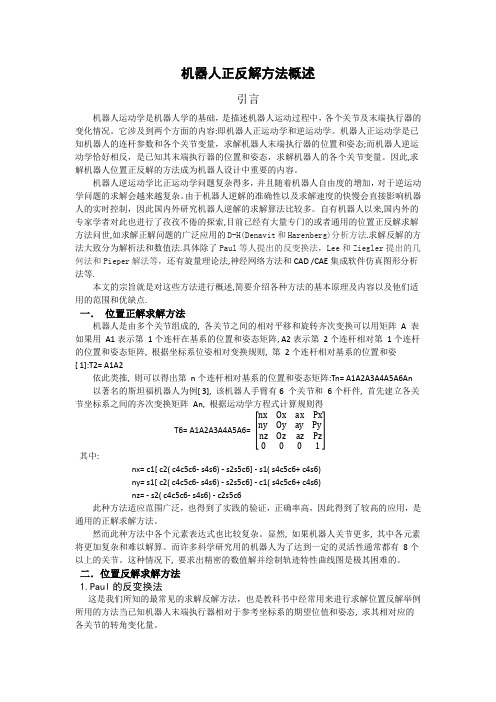
自有机器人以来,国内外的专家学者对此也进行了孜孜不倦的探索,目前已经有大量专门的或者通用的位置正反解求解方法问世,如求解正解问题的广泛应用的D-H(Denavit 和Harenberg)分析方法.求解反解的方法大致分为解析法和数值法.具体除了Paul 等人提出的反变换法,Lee 和Ziegler 提出的几何法和Pieper 解法等,还有旋量理论法,神经网络方法和CAD /CAE 集成软件仿真图形分析法等.本文的宗旨就是对这些方法进行概述,简要介绍各种方法的基本原理及内容以及他们适用的范围和优缺点.一. 位置正解求解方法机器人是由多个关节组成的, 各关节之间的相对平移和旋转齐次变换可以用矩阵 A 表如果用 A1表示第 1个连杆在基系的位置和姿态矩阵, A2表示第 2个连杆相对第 1个连杆的位置和姿态矩阵, 根据坐标系位姿相对变换规则, 第 2个连杆相对基系的位置和姿[ 1]:T2= A1A2依此类推, 则可以得出第 n 个连杆相对基系的位置和姿态矩阵:Tn= A1A2A3A4A5A6An 以著名的斯坦福机器人为例[ 3], 该机器人手臂有6 个关节和 6个杆件, 首先建立各关节坐标系之间的齐次变换矩阵 An, 根据运动学方程式计算规则得T6= A1A2A3A4A5A6= [nx Ox ny Oy ax Px ay Py nz Oz 00az Pz 01] 其中:nx= c1[ c2( c4c5c6- s4s6) - s2s5c6] - s1( s4c5c6+ c4s6)ny= s1[ c2( c4c5c6- s4s6) - s2s5c6] - c1( s4c5c6+ c4s6)nz= - s2( c4c5c6- s4s6) - c2s5c6此种方法适应范围广泛,也得到了实践的验证,正确率高,因此得到了较高的应用,是通用的正解求解方法。
机器人运动学的正逆问题
机器人运动学的正逆问题1.引言在机器人学领域,机器人运动学是一门研究机器人运动的学科,它涉及到机器人的几何形态、运动学模型以及正逆运动学问题等内容。
本文将介绍机器人运动学中的正逆问题,并对其背景、定义、求解方法和应用等方面进行探讨。
2.正逆问题的背景机器人是现代工业生产的重要组成部分,在制造、物流、医疗等领域发挥着重要的作用。
而机器人的运动控制是实现各种任务的基础。
机器人运动学的正逆问题是解决机器人运动控制的关键之一。
正问题:给定机器人的关节角度,求解机器人末端执行器的位置和姿态。
正问题的解决能够帮助我们确定机器人在特定关节空间下的位置和姿态,这对于实现特定运动任务非常重要。
逆问题:给定机器人末端执行器的位置和姿态,求解机器人的关节角度。
逆问题的解决能够帮助我们实现机器人在特定位置和姿态下的运动,从而实现特定任务。
3.正逆问题的定义正问题的定义:给定机器人的关节角度,求机器人的正运动学模型以及末端执行器的位置和姿态。
逆问题的定义:给定机器人的正运动学模型以及末端执行器的位置和姿态,求机器人的关节角度。
4.正逆问题的求解方法4.1正运动学求解方法机器人的正运动学问题可以通过以下几种方法来求解:解析法-:通过几何和三角学方法,推导机器人的正运动学模型,并求解关节角度与末端执行器的位置和姿态之间的关系。
几何法-:利用几何构图和几何关系,将机器人的运动转化为几何问题,从而求解机器人的位置和姿态。
数值法-:通过迭代方法,计算机数值求解机器人的正运动学问题。
4.2逆运动学求解方法机器人的逆运动学问题可以通过以下几种方法来求解:解析法-:通过解析推导,建立关节角度与机器人末端执行器的位置和姿态之间的关系方程,从而求解关节角度。
迭代法-:利用迭代方法,反复逼近机器人的关节角度,使其末端执行器的位置和姿态接近给定值。
数值法-:通过数值优化算法,寻找机器人的关节角度使其末端执行器的位置和姿态与给定值最为接近。
5.正逆问题的应用机器人运动学的正逆问题在实际应用中具有广泛的应用价值:轨迹规划-:通过求解机器人的逆运动学问题,可以实现机器人末端执行器的轨迹规划,从而实现复杂的运动任务。
基于Matlab的MOTOMAN-MH12机器人正运动学仿真
基于Matlab的MOTOMAN-MH12机器人正运动学仿真陈才
【期刊名称】《电子世界》
【年(卷),期】2017(0)15
【摘要】通过研究安川公司的MOTOMAN-MH12机器人,对机器人的各项关节运动参数分析解读,然后通过DH坐标系的建立和使用齐次变换矩阵建立机器人正运动模型.最后,使用MATLAB软件进行仿真,与厂商给出的机器人运动范围做对比,从而验证所建坐标系和正运动模型的准确性和正确性.
【总页数】2页(P53,55)
【作者】陈才
【作者单位】广东工业大学自动化学院
【正文语种】中文
【相关文献】
1.基于ADAMS的关节型机器人正运动学分析与仿真 [J], 张艳丽;李景奎
2.基于MATLAB的机器人正运动学分析与仿真 [J], 赵慧娟
3.基于SharpGL的工业机器人正运动学仿真技术研究 [J], 谢坤鹏;刘朝华;邓三鹏;祁宇明
4.基于MATLAB的六足机器人运动学分析仿真 [J], 刘园园
5.基于MATLAB的工业机器人运动学分析与仿真 [J], 李小伟;高清冉
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Θ1-t图Θ2-t图Θ3-t图Θ4-t图Θ5-t图Θ6-t图理想轨迹仿真轨迹使用matlab计算motoman机器人的正、反解;雅克比并实现仿真(程序如下)%正解反解雅可比clear all;syms thet;syms thet1thet2thet3thet4thet5thet6;syms a1a2a3d4;%正解rotz=[cos(thet) -sin(thet) 0 0;sin(thet) cos(thet) 0 0;0 0 1 0;0 0 0 1];t100=eye(4,4);t210=[1 0 0 a1;0 0 -1 0;0 1 0 0;0 0 0 1];t320=[1 0 0 a2;0 1 0 0;0 0 1 0;0 0 0 1];t430=[1 0 0 a3;0 0 -1 0;0 1 0 0;0 0 0 1];t540=[1 0 0 0 ;0 0 1 0;0 -1 0 0;0 0 0 1];t650=[1 0 0 0;0 0 -1 0;0 1 0 0 ;0 0 0 1];tg0=[1 0 0 0;0 1 0 0 ;0 0 1 d4;0 0 0 1];t10=subs(t100*rotz,thet,thet1);t21=subs(t210*rotz,thet,thet2);t32=subs(t320*rotz,thet,thet3);tg=t430*rotz;t43=subs(tg*tg0,thet,thet4);t54=subs(t540*rotz,thet,thet5);t65=subs(t650*rotz,thet,thet6);t61=t21*t32*t43*t54*t65;t62=t32*t43*t54*t65;t610=t10*t61%反解syms px py pz nx ny nz ox oy oz ax ay az;t60=[nx ox ax px;ny oy ay py;nz oz az pz;0 0 0 1];%求theta1t01=inv(t10);t610=t01*t60;f11=t610(2,4);f12=t61(2,4);%求theta3f311=t610(1,4);f312=t61(1,4);f321=t610(3,4);f322=t61(3,4);%求theta2t30=t10*t21*t32;t03=inv(t30);t631=t03*t60;t632=t43*t54*t65;f211=t631(1,4);f212=t632(1,4);f221=t631(2,4);f222=t632(2,4);%求theta4f411=t631(1,3);f412=t632(1,3);f421=t631(3,3);f422=t632(3,3);%求theta5t40=t10*t21*t32*t43;t04=inv(t40);t641=t04*t60;t642=t54*t65f511=t641(1,3);f512=t642(1,3);f521=t641(3,3);f522=t642(3,3);%求theta6t45=inv(t54);t651=t45*t641;t652=t45*t642;f611=t651(3,1);f612=t652(3,1);f621=t651(1,1);f622=t652(1,1);【注释】此处可用simple命令简化各矩阵。
%雅可比%j1p1=t61;sp=[0 p1(3,4) -p1(2,4);-p1(3,4) 0 p1(1,4);p1(2,4) -p1(1,4) 0]; j12=p1(1:3,1:3);p2=inv(j12)j11=p2*sp;ja1=j11(:,3);jb1=p2(:,3);j1=[ja1;jb1]p1=t62;sp=[0 p1(3,4) -p1(2,4);-p1(3,4) 0 p1(1,4);p1(2,4) -p1(1,4) 0]; j22=p1(1:3,1:3);p3=inv(j22);j21=(inv(j22))*sp;ja2=j21(:,3);jb2=p3(:,3);j2=[ja2;jb2]p1=t632;sp=[0 p1(3,4) -p1(2,4);-p1(3,4) 0 p1(1,4);p1(2,4) -p1(1,4) 0]; j32=p1(1:3,1:3);p4=inv(j32);j31=(inv(j32))*sp;ja3=j31(:,3);jb3=p4(:,3);j3=[ja3;jb3]p1=t642;sp=[0 p1(3,4) -p1(2,4);-p1(3,4) 0 p1(1,4);p1(2,4) -p1(1,4) 0]; j42=p1(1:3,1:3);p5=inv(j42);j41=(inv(j42))*sp;ja4=j41(:,3);jb4=p5(:,3);j4=[ja4;jb4]p1=t65;sp=[0 p1(3,4) -p1(2,4);-p1(3,4) 0 p1(1,4);p1(2,4) -p1(1,4) 0]; j52=p1(1:3,1:3);p6=inv(j52);j51=(inv(j52))*sp;ja5=j51(:,3);jb5=p6(:,3);j5=[ja5;jb5]【注释】同样用simple命令简化各雅克比矩阵。
%仿真分析clc;clear all;close all;a1=200;a2=600;a3=115;d4=770;nx=0;ny=0;nz=1;ox=1;oy=0;oz=0;ax=0;ay=1;az=0;t=0:0.01:10*pi;px=sin(t);py=10*(t-sin(t))+970;pz=10*(1-cos(t))+715;theta1=atan2(py,px);figure(1)hold on;plot(t,theta1);k=0.5*(a1^2+pz.^2+px.^2+py.^2-(a2^2+a3^2+d4^2));u=(k-a1*sqrt(px.^2+py.^2))/a2;theta3=atan2(u,sqrt(a3^2+d4^2-u.^2))-atan2(a3,d4);figure(3)hold on;plot(t,theta3);theta23=atan2((py.*sin(theta1)+cos(theta1).*px-a1).*(d4+a2*sin(th eta3))+pz.*(a2*cos(theta3)+a3),(py.*sin(theta1)+px.*cos(theta1)-a 1).*(a2*cos(theta3)+a3)-pz.*(d4+a2*sin(theta3)));theta2=theta23-theta3;figure(2)hold on;plot(t,theta2);theta4=atan2(-cos(theta1),sin(theta1).*cos(theta2+theta3));figure(4)hold on;plot(t,theta4);theta5=atan2(cos(theta2).*cos(theta3).*cos(theta4).*sin(theta1)-c os(theta1).*sin(theta4)-cos(theta4).*sin(theta1).*sin(theta2).*si n(theta3),sin(theta2 + theta3).*sin(theta1));figure(5)hold on;plot(t,theta5);theta6=atan2(-sin(theta2+theta3).*sin(theta4),cos(theta2).*cos(th eta3).*sin(theta5)-sin(theta2).*sin(theta3).*sin(theta5)+cos(theta2).*cos(theta4).*cos(theta5).*sin(theta3)+cos(theta3).*cos(theta 4).*cos(theta5).*sin(theta2));figure(6)hold on;plot(t,theta6);figure(7)plot3(px,py,pz);grid on;px1=cos(theta1).*(a1+a3*(cos(theta2).*cos(theta3)-sin(theta2).*si n(theta3))+d4*(cos(theta2).*sin(theta3)+cos(theta3).*sin(theta2)) +a2*cos(theta2));py1=sin(theta1).*(a1+a3*(cos(theta2).*cos(theta3)-sin(theta2).*si n(theta3))+d4*(cos(theta2).*sin(theta3)+cos(theta3).*sin(theta2)) +a2*cos(theta2));pz1=a3*(cos(theta2).*sin(theta3)+cos(theta3).*sin(theta2))-d4*(co s(theta2).*cos(theta3)-sin(theta2).*sin(theta3))+a2*sin(theta2); figure(8)plot3(px1,py1,pz1);grid on;【仿真图如下】。