慧鱼创新实验--立体车库
基于“慧鱼”创新套件的立体仓库设计
同组设计者及分工:
独立完成
指导教师签字___________________
年月日
哈尔滨华德学院毕业设计(论文)阶段检查纪录
完成情况
存在问题
指导教师签字
开题检查
中期检查
结题验收
目前土地资源日益紧张,企业用低成本越来越高。立体库的使用可以显著减少企业土地规划面积。一般来说,自动化高架仓库其空间利用率为普通平库的2-5倍。这是相当可观的。
2、采用“慧鱼”创意组合模型主要有组合包、培训模型、工业模型三大系列,涵盖了机械、电子、控制、气动、汽车技术、能源技术和机器人技术等领域和高新学科,利用工业标准的基本构件(机械元件/电气元件/气动元件),辅以传感器、控制器、执行器和软件的配合,运用设计构思和实验分析,可以实现任何技术过程的还原,更可以实现工业生产和大型机械设备操作的模拟,从而为实验教学、科研创新和生产流水线可行性论证提供了可能,世界知名品牌公司等一大批著名公司都采用慧鱼模型来论证生产流水线。创新是一个民族进步的灵魂,而慧鱼创意组合模型就是我们期待的创新教育的理想学具!慧鱼模型就是利用“六面可拼接体”这种开放的零件,来构建或者模拟现实发挥你的创意,来完成机电一体化的工业设计为主的模型组建,现在慧鱼模型在中国有众多的高校以及职业学校在使用,并且越来越受到大家的关注。使用“慧鱼”模型增加了本身的创新能力,对于日后的发展更有利。
技术要求与主要内容:
技术要求:
1、查阅相关的资料;
2、老师的指导;
3、“慧鱼”安装视频;
4、“慧鱼”安装组件。
主要内容:
1、采用“慧鱼”立体仓库设计;
2、将“慧鱼”套件拼接完成,并使其达到立体仓库的实际应用;
3、使用三维设计(UG)设计并完成三维图形(0号图纸一张,A2图纸一张,附加一张电路图);
机器人综合设计与实践之慧鱼机器人创意设计报告
机器人综合设计与实践之慧鱼机器人创意设计报告姓名:学号:专业班级:姓名:学号:专业班级:姓名:学号:专业班级:姓名:学号:专业班级:姓名:学号:专业班级:报告提交时间:2017 年12 月18 日1、作品名称:承载汽车停车装置2、主要材料:慧鱼创意组合模型3、设计目的随着社会的进步,家家户户都有了小汽车,出行啊是越来越方便,但随之而来的问题也成为了热点话题,出行方面,还有限号等措施来进行限制,但一辆车,无论如何限号,停车总是一辆车要实打实的占一个车位的,在这个寸土寸金的年代,停车位是越发珍惜。
我们小组就以此为契机设计了这款承载汽车停车装置,为的就是为解决停车难这一社会问题提供我们大学生的一点思路。
而理论上我们的这个装置思路,可将停车位土地的利用提高四倍左右。
切实解决了停车位稀缺引发争抢的问题。
4、设计与制作步骤□1计构思及设计草图:我们组五个人经过激烈的讨论后,最后选定做简易可实施的高空停车装置,并放弃了摩天轮式的传车和文具盒式的停车方式,最后选用可施行的货运传送方式。
□2基本骨架:我们组选用长条行快上下左右两层来模拟楼层,做到了简单,神似,美观的效果。
□3货运传送装置:□4动力装置:动力装置方面的问题我们组才用了电机动力,可施行,具有可靠性。
□5装运车辆的框架:这对于我们组来说是个难题,多次失败后,组长决定才用电梯式的方式将车辆运送到高空楼层进行停放。
可靠。
□6进行骨架,动力装置,传送装置的合并与组装。
□7进行局部修改,让装置高端大气上档次。
5、作品功能简述及其搭建过程中遇到的问题,解决方法?我们作品是一个简易的汽车停泊装置,主要的功能是停放轿车、面包车等中小型汽车。
在作品的制作过程中我们遇到的问题及解决方法如下:一、对制作零件和安装零件的方法不熟悉。
在我们的小组当中,大多数人所在的专业与本课程的内容没有联系,因此也鲜少有机会能接触到此类装置的制作,所以对它们不太熟悉。
但是好在老师为我们提供了相关的专业安装书集,并且给了我们一堂课的时间来熟悉并使用这些工具、零件,我们的小组通过积极参与这个活动,娱乐彼此之间的交流和分享,在短时间内,顺利解决这这个问题的。
基于慧鱼模型的传送式立体车库创新设计
车板受力10000N。
图1传送式立体停车库总体拼装图
各部分结构及工作原理
立体停车库主体由六大装置组成:智能控制装阀装置、进车装置、停车及托车板装置、升降横取车装置。
智能控制装置
可以使用编程软件ROBO Pro来控制装配了制器的机器人。
它的优点是内部自带若干能单功能的基本模块,编程时,若要实现某一基只要直接调用而不需要书写代码。
程序采用的表现形式,理解起来更为直观[4]。
作品由5块慧鱼编程接口板控制,由直流9V 电源供电。
接通工作开关后程序启动,各个部单独操作。
利用计数器与限位开关联合工作,确控制。
图2传送式立体停车库总程序图。
慧鱼创意设计实验报告doc
慧鱼创意设计实验报告篇一:慧鱼实验报告华北电力大学实验报告实验名称: 慧鱼创意系统的实践与开发课程名称:科技创新实践3实验人:设制1301班施宗财 XX04410121输电1402班张志聪 XX04400231机电1401班侯文涛 XX044XX0成绩:优秀指导教师:房静实验日期:华北电力大学工程训练中心 | || |隧道蔽障寻迹机器人作品设计说明一.研制背景及意义我们知道,隧道、涵洞、高楼等工程建筑物发生事故时会发生坍塌,此时,救援人员是无法直接进入这些建筑物中进行营救工作的。
同时,也没法得知里面的实际状况。
为了解决这个问题,我们此次设计了这个隧道蔽障寻迹机器人,以期解决这个问题,以方便营救,代替人力进入这些复杂地段进行探测工作。
根据设计方案,我们先搭建了慧鱼模型,并进行了调试及简单的实地实验。
二、实验目的1、认识了解慧鱼创意模型组合包中的各种功硬件。
2、了解ROBOPRO软件及编程。
3、了解慧鱼创意模型是如何控制与协调机构运动的。
4、锻炼机械创新能力,初步建立对机电一体化产品的认识。
三、实验原理隧道机器人是一种代替人力进入到坍塌建筑物中的机器。
能够进行蔽障、循迹,并且能够携带摄像头、红外探头、热敏、光敏、声敏电阻等的传感器进入复杂地段进行探测的机器。
拥有很大的市场开发前景。
四、实验器材1、“慧鱼”创意模型组合包。
2、“慧鱼”专用电源、数据线。
3、计算机一台。
4、“慧鱼”专用智能接口板。
5、ROBOPRO软件。
五、实验准备认识“慧鱼”创意模型使用手册中已搭建的示例模型。
六、实验内容1、根据慧鱼”创意模型使用手册,使用各种构件逐步搭建示例模型。
2、模型搭建好后连接相应电路。
3、在计算机上应用ROBOPRO软件编写相应程序,并通过数据线将程序下载到接口板中。
4、接通电源,调试程序。
5、验收成果并拆卸构件,放回原处。
七、实物成品图片展示八、程序流程图九、简单介绍功能1、进入坍塌建筑物进行探测(可以加装摄像头以及探测头);2、寻找并避开障碍物;3、给定轨迹,能迎着所给轨迹进行运动(走出轨迹以后,灯亮,同时蜂鸣器发声)十、实物示范(实际效果图)篇二:慧鱼创新设计实验报告实验五慧鱼创新设计实验报告姓名:宋俊超班级: 13机自专升本1班成绩:实验日期: 12月18日教师签字:一、实验目的1、培养学生用创造性思维方法,设计、搭建新型的机构或装置;2、培养学生的创新意识及综合设计能力;3、项目组织能力。
一种无避让可旋转立体停车库的仿真模型设计
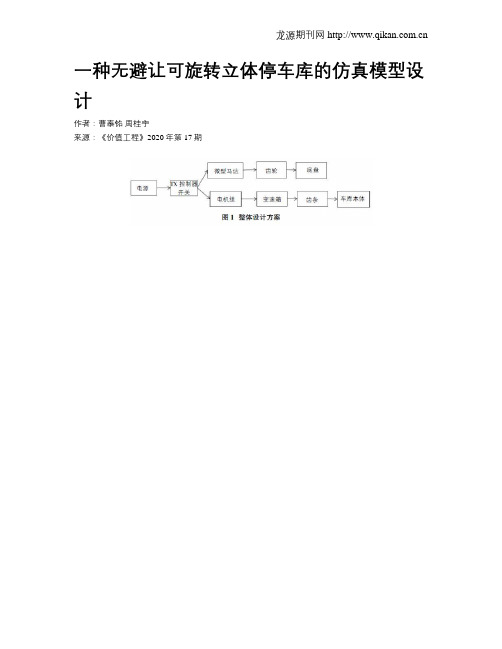
一种无避让可旋转立体停车库的仿真模型设计作者:曹泰铭周桂宇来源:《价值工程》2020年第17期摘要:本装置主要对新型无避让可旋转立体停车库的慧鱼模型进行搭建、仿真,采用改进的平行四边形机构实现车位升降,在二层底盘上安装旋转装置,直接旋转车头方向,取车方便。
并通过对关键结构进行动力分析得出结论,其设计具有合理性,实际投产后,占地面积小,适应路况多,减少停车时间,降低驾驶者取车难度。
Abstract: This device mainly constructs and simulates the hui fish model of the new rotating three-dimensional parking garage, adopts the improved parallelogram mechanism to realize the parking space lifting, installs the rotating device on the second floor chassis, directly rotates the direction of the locomotive, and takes the car conveniently. Through the dynamic analysis of the key structure, it is concluded that the design is reasonable. After the actual production, it will cover a small area, adapt to more road conditions, reduce the parking time and reduce the difficulty for drivers to get the car.關键词:旋转立体停车库;慧鱼模型;动力分析Key words: rotary three-dimensional parking garage;fish model;dynamic analysis中图分类号:U491.2 ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; 文献标识码:A ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ;文章编号:1006-4311(2020)17-0137-021 ;立体车库的背景停车问题是城市在发展过程中出现的静态交通(车辆停放状态)问题,静态交通是相对于动态交通(车辆行驶状态)而存在的一种交通形态,二者相互联系,互相影响。
基于“慧鱼”的小型智能立体停车库设计
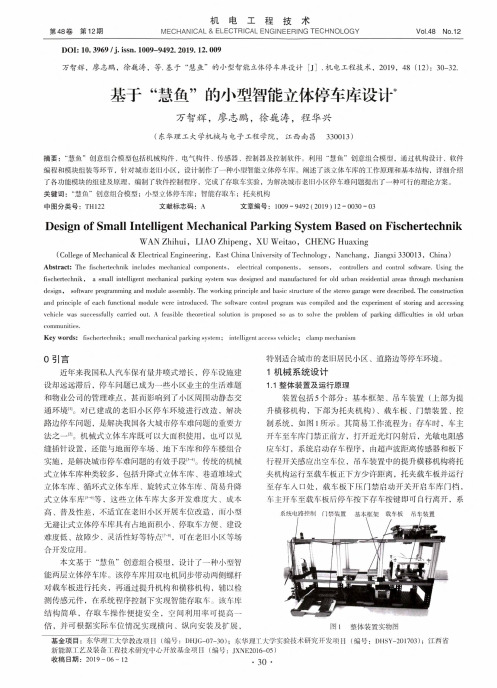
机电工程技术第48卷 第 12期MECHANICAL & ELECTRICAL ENGINEERING TECHNOLOG 丫Vol.48 No.12DOI: 10. 3969/j. issn. 1009-9492. 2019.12. 009万智辉,廖志鹏,徐巍涛,等.基于“慧鱼”的小型智能立体停车库设计[J].机电工程技术,2019, 48 (12): 30-32.基于“慧鱼”的小型智能立体停车库设计*万智辉,廖志鹏,徐巍涛,程华兴(东华理工大学机械与电子工程学院,江西南昌 330013)摘要:“慧鱼”创意组合模型包括机械构件、电气构件、传感器、控制器及控制软件。
利用“慧鱼”创意组合模型,通过机构设计、软件编程和模块组装等环节,针对城市老旧小区,设计制作了一种小型智能立体停车库。
阐述了该立体车库的工作原理和基本结构,详细介绍了各功能模块的组建及原理,编制了软件控制程序,完成了存取车实验,为解决城市老旧小区停车难问题提出了一种可行的理论方案。
关键词:“慧鱼”创意组合模型;小型立体停车库;智能存取车;托夹机构中图分类号:TH 122文献标志码:A文章编号:1009-9492(2019)12-0030-03Design of Small Intelligent Mechanical Parking System Based on FischertechnikWAN Zhihui, LIAO Zhipeng, XU Weitao, CHENG Huaxing(College of Mechanical & Electrical Engineering, East China University of Technology , Nanchang, Jiangxi 330013, China)Abstract : The fischertechnik includes mechanical components , electrical components , sensors , controllers and control software. Using the fischertechnik, a small intelligent mechanical parking system was designed and manufactured for old urban residential areas through mechanismdesign , software programming and module assembly. The working principle and basic structure of the stereo garage were described. The construction and principle of each functional module were introduced. The software control program was compiled and the experiment of storing and accessing vehicle was successfully carried out. A feasible theoretical solution is proposed so as to solve the problem of parking difficulties in old urbancommunities.Key words: fischertechnik; small mechanical parking system ; intelligent access vehicle; clamp mechanism0引言近年来我国私人汽车保有量井喷式增长,停车设施建设却远远滞后,停车问题已成为一些小区业主的生活难题和物业公司的管理难点,甚而影响到了小区周围动静态交 通环境叫 对已建成的老旧小区停车环境进行改造.解决路边停车问题,是解决我国各大城市停车难问题的重要方法之一叫机械式立体车库既可以大面积使用,也可以见 缝插针设置,还能与地面停车场、地下车库和停车楼组合实施,是解决城市停车难问题的有效手段'1。
基于慧鱼模型的三层无避让侧方位停车装置的设计
技术平台基于慧鱼模型的三层无避让侧方位 停车装置的设计张 涛,李高旭,周进良,殷郑丽,周炽琳(西南石油大学,四川 成都 610500)摘 要:针对城市普遍存在的停车难问题,国内外专家学者先后提出了垂直升降式、平面移动式、垂直循环式立体车库等新型停车装置。
本项目组成员在查阅大量相关文献的基础之上分析得出目前已有的停车装置大多需要特定场地用于安装,并不适用于绝大多数小区。
三层无避让侧方位停车装置具有空间利用率高、结构模块化、停取车便捷等特点,可以极好地适应小区侧方位停车 需求。
关键词:无避让;侧方位;停车装置;慧鱼设计1 现状研究近年来,人们的生活水平不断提高,对于汽车的需求急剧增加。
2013年汽车的保有量突破1.3亿,2014年增至1.55亿,到2017年中国居民每百户家用汽车拥有量29.7辆。
虽然私家车超高速増长的时代己经结束,但中高速增长的新常态还将持续10年,年增长率基本维持在10%左右。
很多城市在早期规划时,对停车位重视力度不够,小区建设时未能对停车位的供求给予足够的考量,造成了现如今各大城市特别是用地紧张的一二线城市出现严重的“车多位少”的尴尬局面。
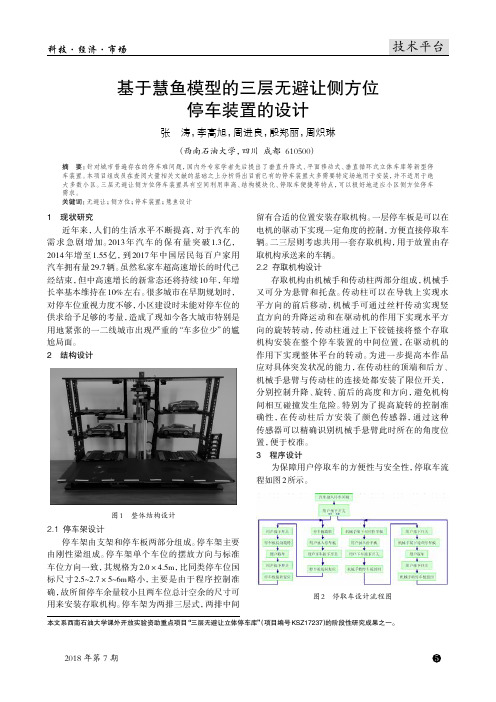
2 结构设计图1 整体结构设计2.1 停车架设计停车架由支架和停车板两部分组成。
停车架主要由刚性梁组成。
停车架单个车位的摆放方向与标准车位方向一致,其规格为2.0×4.5m,比同类停车位国标尺寸2.5~2.7×5~6m 略小,主要是由于程序控制准确,故所留停车余量较小且两车位总计空余的尺寸可用来安装存取机构。
停车架为两排三层式,两排中间留有合适的位置安装存取机构。
一层停车板是可以在电机的驱动下实现一定角度的控制,方便直接停取车辆。
二三层则考虑共用一套存取机构,用于放置由存取机构承送来的车辆。
2.2 存取机构设计存取机构由机械手和传动柱两部分组成,机械手又可分为悬臂和托盘。
传动柱可以在导轨上实现水平方向的前后移动,机械手可通过丝杆传动实现竖直方向的升降运动和在驱动机的作用下实现水平方向的旋转转动,传动柱通过上下铰链接将整个存取机构安装在整个停车装置的中间位置,在驱动机的作用下实现整体平台的转动。
“慧鱼创意组合模型”实验

河南职业技术学院机电系
机械运动
• 传递圆周运动
直(斜)齿轮传动
锥齿轮传动
河南职业技术学院机电系
机械运动
传递圆周运动
涡轮蜗杆传动 (自锁)
冠状齿轮
河南职业技术学院机电系
机械运动
• 传递直线运动
齿轮齿条传动
丝杆螺母传动
河南职业技术学院机电系
机械运动
带传动
河南职业技术学院机电系
机械运动
• 滑轮传动
定滑轮: 固定的, 不省力但改变方向
例: 旗杆
河南职业技术学院机电系
机械运动
• 滑轮传动
动滑轮:
省力 但不能改变力的方向
例: 吊车
河南职业技术学院机电系
机械运动
• 滑轮传动
滑轮组
河南职业技术学院机电系
河南职业技术学院机电系
慧鱼教具编程模块简介
2)Input——输入模块
按键开关 光电传感器 磁敏感应器
插入该功能模块时,应从“Image” 对话框中选择显示的对应图标。 在“Swap 1/0 branches” 中选择 希望的输出状态。
河南职业技术学院机电系
慧鱼教具编程模块简介
3)Wait for input——等待输入模块
河南职业技术学院机电系
慧鱼教具编程模块简介
5)Time delay——延时模 块
延时模块是在程序中设定延迟时 间长短的功能模块。当程序步骤到达 Wait延时模块时,时间延迟,然后再 执行程序的下一步。
河南职业技术学院机电系
慧鱼教具编程模块简介
6)Start——开始模块
基于慧鱼模型的自行车智能停车装置设计
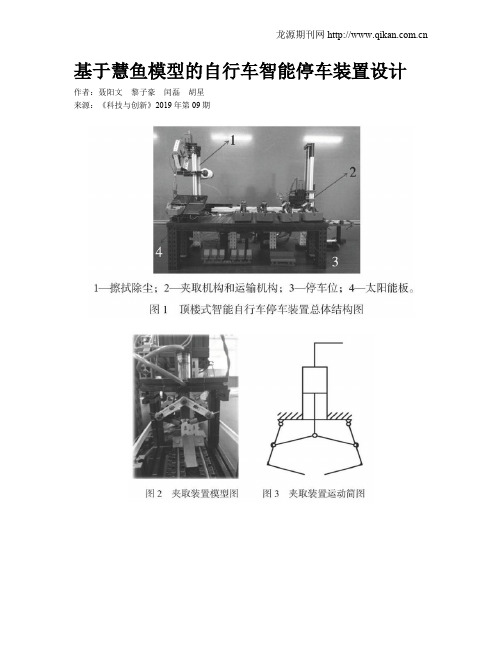
基于慧鱼模型的自行车智能停车装置设计作者:聂阳文黎子豪闰磊胡星来源:《科技与创新》2019年第09期摘要:针对目前自行车停车装置存在停放位置不足(或乱停乱放)、久置积灰以及停放不安全等问题,设计了一种顶楼式自行车智能停车装置,采用了慧鱼模型零部件对该装置设计方案进行模型搭建,并基于慧鱼ROBO PRO编程软件对该装置进行程序设计和系统调试,验证了该装置设计方案技术的可行性。
关键词:慧鱼模型;自行车;停车装置;环境污染中图分类号:U495文献标识码:ADOI:10. 15913/ki.kjycx.2019.09.020近年来,随着交通拥堵、环境污染等问题日益严重,自行车作为一种经济便利、低碳环保的交通方式,作为一种健康的生活方式,受到世界各国青睐[1]。
与此同时,自行车停放问题随着自行车数量增长而越来越严重,例如停放位置严重不足(乱停乱放影响公共环境)[2-3]、久置积灰以及停放不安全等问题,而现有的自行车停车装置普遍存在占用公共空间、功能相对单一以及容易被盗等问题。
本文设计了一种顶楼式自行车智能停车装置,采用密码存放方式,将自行车停放在小区休息亭、路面车库或者公交站台候车亭的顶部,不占用公共空间,并且配置擦拭除尘装置对自行车上灰尘进行擦拭,有效解决目前自行车停放问题。
慧鱼模型是技术含量很高的工程技术类拼装模型,涵盖机械工程、计算机、自动控制等多个学科,具有很强的扩展性和启发性,被广泛应用于实验教学、科学研究和实际生产中[4]。
本文基于慧鱼模型对顶楼式自行车智能停车装置设计方案进行模型搭建,并采用ROBO PRO 编程软件对该装置进行程序设计和系统调试,验证了该装置设计方案在工程技术可行性。
此作品已获得第八届全国大学生机械创新设计大赛慧鱼组竞赛一等奖。
1 机械设计方案顶楼式智能自行车停车装置的设计方案综合运用了连杆机构、齿轮齿条机构、链传动、丝杠螺母结构等多种慧鱼模型零部件,实现了将自行车夹紧、提升、下降、转向、擦拭除尘等自行车存取全过程的稳定运行,其模型总体结构如图1所示。
机械式立体停车库的外观设计

机械式立体停车库的外观设计摘要:为解决目前停车难、机动车乱停放等问题,基于慧鱼模型设计了机械式立体车库。
机械式立体车库系统由车辆承载运输装置、控制装置、车库顶棚防护装置组成。
通过车辆承载运输装置将底层车辆移至上层停车区,增大了空间利用率;车库顶棚可沿固定轴转动一定角度,当雨雪天来临时,利用气压泵提供动力,将顶棚一侧顶起,倾斜一定的角度,实现除雨雪的功能。
关键词:立体车库;慧鱼模型;机械式传统的机械式立体车库每个车子的位置都存在载车板,中间层的载车板既可以平移又可实现升降,最底层的载车板只能实现左右平移。
本论文设计的3×3型七车位的机械式立体车库,较传统立体车库的不同点在于,最上层载车板也可以实现升降运动,此立体车库通过中间层和下层的空位,利用载车板平移来变换空位,将汽车停到指定位置,需要强调第一层的汽车无需变换位置,可以直接实现开进与开出。
由于机械式的立体车库对场地的要求不大,且针对不同的地形以及空间可灵活适应的特点,广泛被应用。
1械式立体车库控制系统硬件设计机械式立体停车库控制系统中的PLC主要完成对载车板、载车板位置以及完成相应存取车的操作。
用按钮开关、行程开关实现位置监控,用相应接触器、继电器实现电机的起停控制。
对电机正反转的控制实现对相应车位载车板的控制。
同时此机械式立体车库还应该具有互锁装置,即载车板的升降动作与平移动作不能同时进行。
行程开关的设定能够实现载车板动作的精确定位,能够到达平移或升降的预定位置,从而可以保证存取车安全可靠,行程开关的逻辑同样需要严格互锁。
行程开关以及压力传感器根据其位置布置的不同功能不同,安装在载车板左右两边的行程开关,主要用于检测载车板上的车是否停放到指定位置,安装在每层底部的行程开关,主要用于确保载车板到达指定位置。
载车板对角线上安装压力传感器可以用来判断载车板上是否有车。
同时在此立体车库中还运用了位移开关,报警装置,紧急停车开关,手动按钮,复位开关等。
慧鱼智能化立体旋转停车库的创新设计

DOh 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 9 - 9 4 9 2 . 2 0 1 3 . 0 8 . 0 2 1
慧鱼智能化立体旋转停车库的创新设计术
蒯 苏 苏 , 陈寒松 ,孙 明权 ,吴动 波 , 张 闯 ,杨 君
( 江 苏大 学 , 江 苏镇 江 2 1 2 0 1 3 )
KUAI S u - s u, CHE N Ha n - s o n g ,S UN Mi n g — q u a n ,W U D o n g — b o ,Z HANG C h u a n g , YANG J u n ( J i a n g s u U n i v e r s i t y ,Z h e n j i a n g 2 1 2 0 1 3 ,C h i n a )
中图分类号 :T HI 2 2 文献标识码 :A 文章编号 :1 0 0 9—9 4 9 2( 2 0 1 3 ) 0 8—0 0 8 1 一O 5
F i s c h e r t e c h i n k I n t e l l i g e n t Th r e e - Di me n s i o n a l Ro t a t i n g Pa r k i n g Ga r a g e I n n o v a t i v e型 ,车库 的结构设计使用 了 “ 行 星轮”式转盘 结构 ,控制软件用 R O B O P r o 图形化编程 ,控制智 能化立体旋转停车库
完成一系列复杂动 作 ,如寻找车库— —沿轨迹行走——遇 到边界停止—— 回避边界— —识别车位— —清洁车身——继续沿轨迹 行走等 ,充分利用 了创新智能 。 关键词 :创新设计 ;T R I Z 理论 ;标准解 ;慧鱼模型 ;智能化车库 ;计算机技术
基于慧鱼模型的传送式立体车库创新设计
基于慧鱼模型的传送式立体车库创新设计作者:宋玉梅庞海文孙增浩丰欢覃如影解泽兴来源:《科技视界》2019年第05期【摘要】针对小区停车存在的问题,利用慧鱼创意组合模型,设计组装了传送式立体车库。
详细介绍了其设计思路、各部分结构、工作原理、工作流程及创新点。
模型经过了反复试验,可以达到预定功能,并得到了大赛评委们的充分肯定,具有设计的独特性及实用性。
【关键词】慧鱼模型;传送式;立体车库;创新设计中图分类号: TH122-4;G642 文献标识码: A 文章编号: 2095-2457(2019)05-0034-0030 引言伴随我国经济持续发展,汽车保有量迅猛增加,尤其是私家小轿车的快速增多,带来了大中城市的普遍拥堵和停车难问题。
现在很多小区内车位也严重不足。
为此,第八届全国大学生机械创新设计大赛主题之一即为“小型停车机械装置”的设计,并规定停车数量为10辆家用轿车以下,主要解决现在小区存在的停车难问题。
基于这一大赛主题,我们利用了98%的慧鱼创意组合模型元件设计组装了这个传送式立体车库。
这个车库可以在同样占地面积的情况下将现有车位增加2~3倍,可以有效缓解小区停车难的问题。
1 慧鱼创意组合模型简介慧鱼创意组合模型1964年诞生于德国,是技术含量很高的智趣拼装模型,其涵盖了机械、电子、气动、新能源和机器人技术等学科,利用工业标准的基本构件(机械元件/电气元件/气动元件),辅以传感器、控制器、执行器和软件的配合,运用设计构思和实验分析,可以实现任何生产过程的还原。
慧鱼创意组合模型为创新教育和创新实验提供了最佳的载体[1-3]。
2 设计思路传送式立体停车库是基于慧鱼的创新设计,作品采用斜停式,一共可以停放7辆车,两侧各停放三辆,顶上停放一辆。
作品整体采用模块化设计思路,把它分为:进车、出车、停车和控制模块等。
传送式立体停车库总体拼装图如图1所示。
2.1 车库外形尺寸设计根据大赛主题,我们对目前常见的一些小型汽车进行了长、宽、高度的数据统计,得出如下结论:车体长度<7m,宽度<2.5m,高度<2m。
“智慧型”慧鱼实验室设计说明书
2014年第六届全国大学生机械设计创新大赛慧鱼组作品设计说明书作品名称:“智慧型”慧鱼创意实验室设计者指导教师:参赛单位:天津工业大学日期: 2014年1月11日“智慧型”慧鱼创意实验室设计者:指导教师:(天津工业大学机械工程学院,天津300387)摘要本作品设计是将物联网技术与传统的机械结构相结合,设计一“智慧型”慧鱼创意实验室。
该实验室设计主要致力于如何更好地建设未来慧鱼实验室、利用慧鱼零件来满足对机械相关专业课程学习的需要,能够使课堂教学更加丰富、更具吸引力。
该实验室分为四大区域,分别是零件摆放区、拼接区、成品展示区和作品演示区,每块区域都涵盖了不同的简单机械装置。
实验室用慧鱼零件拼接成机械装置完成,并利用WIFI和二维码技术将慧鱼零件、作品与互联网上的电子信息相连接、以手机为终端读取相应机械装置的机械原理知识及机构间运动关系的分析,拓展慧鱼实验室的使用功能。
关键词:智慧型慧鱼实验室二维码作品内容简介本作品旨在设计一“智慧型”慧鱼创意实验室,将物联网技术与传统的机械结构相结合,不仅满足现有慧鱼实验室的基本需求,同时体现未来实验室的智能型、知识共享性。
mm,室内分为三大区域,分别是本实验室模型的整体尺寸为800x600x5003零件摆放区和拼接区、成品展示区和作品演示区、休息区。
零件摆放与拼接区设计一公共零件存放盒,以满足不同种类零件的存放要求。
零件拼接区设计一可折叠桌椅,以减少对实验室的占有率,提高现有实验室的使用率。
在拼接桌上面有控制面板,按下具体功能键会有相应的零件盒翻转,体现零件查找自动化。
成品展示区所展示的是机械原理模拟区、往年竞赛的优秀作品和校企合作产品,用慧鱼模型去展示机械原理相关知识点,以对机械原理会有更深入的了解,也减少对实物模型的依赖进而节省实验费用。
成品展示区中的典型的实例和机构上,均设有二维码,学生通过手机扫描二维码可了解到该机构的原理和其它的应用,并将相关信息存到手机中,随时查阅,将现有实验室的知识进行拓展,提高实验室使用的智能化。
基于慧鱼模型方法的老旧小区立体车库创新设计
收稿日期:2020-10-29基于慧鱼模型方法的老旧小区立体车库创新设计张永锐,张忠林,王飞皓,丛晖,张瀚文,郭旋(哈尔滨工程大学机电工程学院,哈尔滨150001)摘要:针对现存的老旧小区停车难问题,进行了统计性的数据分析,提出了一种适用于老旧小区的立体车库的设计方案,方案运用了高空可旋转式立体车库的设计思路和方法,通过“慧鱼”组合模型搭建了立体车库物理模型,完成了车库控制系统的设计与调试。
经过慧鱼搭建和干涉验证了车库设计的可行性,可以实现多辆车的同时存取,存取过程准确有序进行的目标。
方案具有占地小、效率高、方便停车等设计特点,可为老旧小区的立体车库设计提供参考。
关键词:高空可旋转式立体车库;“慧鱼”创意组合模型;机械设计;控制设计中图分类号:U491.7+1文献标志码:A文章编号:1009-9492(2021)05-0165-06开放科学(资源服务)标识码(OSID ):Innovative Design of Stereo Garage in Old Residential District Based on CreativeModel of Fischer CombinationZhang Yongrui ,Zhang Zhonglin ,Wang Feihao ,Cong Hui ,Zhang Hanwen ,Guo Xuan(School of Mechanical and Electrical Engineering,Harbin Engineering University,Harbin 150001,China )Abstract:According to the existing parking difficulties in elderly communities,statistical data was analyzed and a three-dimensional garage design scheme suitable for elderly communities was ing the design ideas and methods of the high-altitude rotating three-dimensional garage,the physical model of the three-dimensional garage was established through the Fischer combined model,and thedesign and debugging of the garage control system were completed.The construction and intervention of fischers proved the feasibility of the garage design,which can realize the simultaneous access of multiple vehicles and the accurate and orderly entry and exit process.The schemehas innovative design features,such as small footprint,high efficiency,easy parking,etc.,which can solve practical problems and provide a reference for the design of the stereo garage in the old community.Key words:high-altitude rotatable stereo garage;Fischer creative combination model;mechanical design;control design第50卷第05期Vol.50No.05机电工程技术MECHANICAL &ELECTRICAL ENGINEERING TECHNOLOGYDOI:10.3969/j.issn.1009-9492.2021.05.045张永锐,张忠林,王飞皓,等.基于慧鱼模型方法的老旧小区立体车库创新设计[J ].机电工程技术,2021,50(05):165-170.0引言近年来,随着我国经济水平和居民生活水平的不断提高,人们购车的能力及意愿显著提升,机动车以及汽车保有量稳步增长。
慧鱼机器人实验报告内容
华北电力大学综合性实验报告项目名称:慧鱼创意模型开放实验课程名称:科技创新实践3实验人员:沙理想测控1201班 8赛测控1201班 5实验时间:2015年11月28日华北电力大学工程实训中心慧鱼创意模型开放实验实验报告一、实验目的(1)认识了解“慧鱼”创意模型组合包中的各种硬件;(2)了解ROBOPRO软件及编程;(3)了解慧鱼创意模型是如何控制和协调机构运动的;(4)锻炼机械创新设计能力,初步建立对机电一体化产品的认识。
二、实验器材(1)“慧鱼”创意模型组合包;(2)“慧鱼”专用电源;(3)个人计算机;(4)“慧鱼”专用智能接口板;(5)ROBOPRO软件;三、实验准备认识“慧鱼”创意模型使用手册中已搭建的示例模型。
四、实验容2.红绿灯(1)完成模型与接口板、接口板与计算机之间的连接;(2)分别测试马达、灯、信号开关;(3)编写控制程序,实现红绿灯通常情况为绿灯亮,当有行人按下按钮I1,3秒后绿灯灭,黄灯亮,4秒后黄灯灭,红灯亮,红灯持续亮10秒钟,接着红灯、黄灯同时亮3秒钟,随后红、黄灯灭,绿灯亮。
(4)写出实验报告:说明模型的工作原理,附上所编程序。
原理:利用计时器,当有人时,绿灯亮;当过一定时间后,红灯亮,绿灯灭;然后黄灯亮。
当程序如下:3.移动门(1)完成模型与接口板、接口板与计算机之间的连接;(2)分别测试马达、灯、信号开关、光电传感器,搞清马达、灯、光电传感器的作用;(3)编写控制程序,并运行使模型实现按下按钮I3,门打开,5秒钟后关闭。
编程注意事项:首先要关门,这是起始位置,马达旋转直到门碰到限位开关I1=0;查询按钮I3,如果按下,门打开,启动马达向左直到限位开关I2为1;5秒后再次关门(到程序开始处循环)(4)编写控制程序,并运行使模型实现:在作业一的基础上增加光传感器,防止顾客动作慢,门夹住他。
注意只有在光幕没有遮住时,门才能关闭;在关门时只要光幕被遮住,门应立即打开;只要光幕被遮住,即使按钮没有按下门也要打开。
立体车库升降传输装置的设计
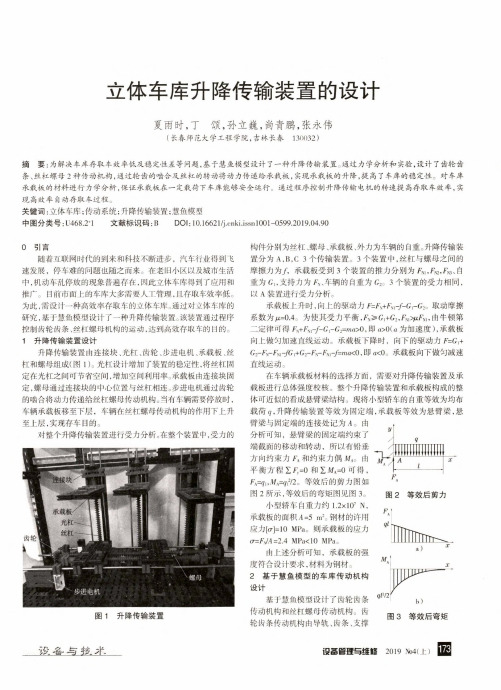
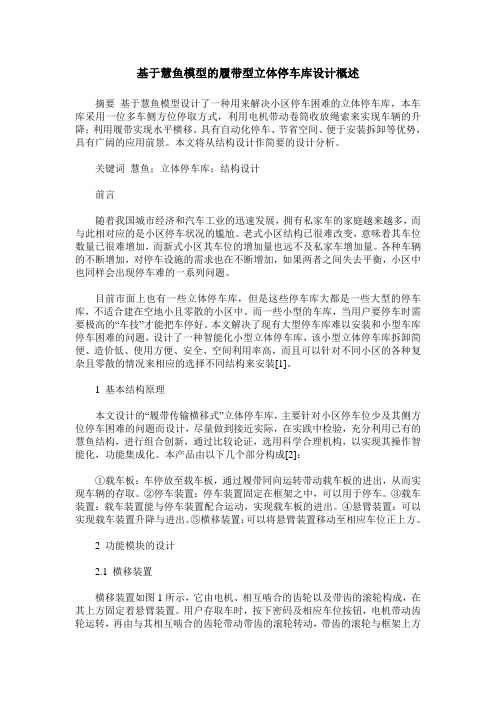
图2等效后剪力
度符合设计要求,材料为钢材。
2基于慧鱼模型的车库传动机构 设计
基于慧鱼模型设计了齿轮齿条
传动机构和丝杠螺母传动机构。齿 轮齿条传动机构由导轨、齿条、支撑
图3等效后弯矩
ห้องสมุดไป่ตู้
设备与技尢
i殳备留理与维修2019 No4(上) 173
块、固定支撑组成,齿条、支撑块、固定支撑可由慧鱼零件搭接 (图4)。在整个传动机构中电机起着传递动力的作用。现对齿轮 齿条传输电机进行选择。
在车辆承载板材料的选择方面,需要对升降传输装置及承
载板进行总体强度校核。整个升降传输装置和承载板构成的整
体可近似的看成悬臂梁结构。现将小型轿车的自重等效为均布
载荷g,升降传输装置等效为固定端,承载板等效为悬臂梁,悬
臂梁与固定端的连接处记为A。由
分析可知,悬臂梁的固定端约束了
y
q
端截面的移动和转动,所以有铅垂
0引言 随着互联网时代的到来和科技不断进步,汽车行业得到飞
速发展,停车难的问题也随之而来。在老旧小区以及城市生活 中,机动车乱停放的现象普遍存在,因此立体车库得到了应用和 推广。目前市面上的车库大多需要人工管理,且存取车效率低。 为此,需设计一种高效率存取车的立体车库。通过对立体车库的 研究,基于慧鱼模型设计了一种升降传输装置。该装置通过程序 控制齿轮齿条、丝杠螺母机构的运动,达到高效存取车的目的。 1升降传输装置设计
上升缓慢,但也可到达指 制造成本低、并具有
定位置:时长约8 so
自锁功能。
当模拟车辆的重量超过
齿轮齿条传动机构
4号
齿轮齿条 0.5炖时,发现车位也能平 的承载力大,传动精 稳地上升至指定位置,有轻
基于慧鱼模型的履带型立体停车库设计概述
基于慧鱼模型的履带型立体停车库设计概述摘要基于慧鱼模型设计了一种用来解决小区停车困难的立体停车库,本车库采用一位多车侧方位停取方式,利用电机带动卷筒收放绳索来实现车辆的升降;利用履带实现水平横移。
具有自动化停车、节省空间、便于安装拆卸等优势,具有广阔的应用前景。
本文将从结构设计作简要的设计分析。
关键词慧鱼;立体停车库;结构设计前言随着我国城市经济和汽车工业的迅速发展,拥有私家车的家庭越来越多,而与此相对应的是小区停车状况的尴尬。
老式小区结构已很难改变,意味着其车位数量已很难增加,而新式小区其车位的增加量也远不及私家车增加量。
各种车辆的不断增加,对停车设施的需求也在不断增加,如果两者之间失去平衡,小区中也同样会出现停车难的一系列问题。
目前市面上也有一些立体停车库,但是这些停车库大都是一些大型的停车库,不适合建在空地小且零散的小区中。
而一些小型的车库,当用户要停车时需要极高的“车技”才能把车停好。
本文解决了现有大型停车库难以安装和小型车库停车困难的问题,设计了一种智能化小型立体停车库,该小型立体停车库拆卸简便、造价低、使用方便、安全、空间利用率高,而且可以针对不同小区的各种复杂且零散的情况来相应的选择不同结构来安装[1]。
1 基本结构原理本文设计的“履带传输横移式”立体停车库,主要针对小区停车位少及其侧方位停车困难的问题而设计,尽量做到接近实际,在实践中检验,充分利用已有的慧鱼结构,进行组合创新,通过比较论证,选用科学合理机构,以实现其操作智能化,功能集成化。
本产品由以下几个部分构成[2]:①载车板:车停放至载车板,通过履带同向运转带动载车板的进出,从而实现车辆的存取。
②停车装置:停车装置固定在框架之中,可以用于停车。
③载车装置:载车装置能与停车装置配合运动,实现载车板的进出。
④悬臂装置:可以实现载车装置升降与进出。
⑤横移装置:可以将悬臂装置移动至相应车位正上方。
2 功能模块的设计2.1 横移装置横移装置如图1所示,它由电机、相互啮合的齿轮以及带齿的滚轮构成,在其上方固定着悬臂装置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
辽宁工学院
慧鱼模型组合实验报告书
(创新设计)
学院(系):机械工程与自动化学院
专业班级:机电022 团队:
学生姓名:候振峰刘静岩高飞
任大维王光玥
指导教师:尚锐应明
实验项目:
慧鱼模型组合实验—自行创意组合
一、实验目的
慧鱼模型组合实验是学生理论联系实际的实践教学环节,是对学生进行的一次专业设计训练。
本实验的任务是应用慧鱼模型进行工业产品的组合与设计,通过本次实验使学生获得以下几方面能力。
1、进一步巩固和加深学生所学的专业理论知识;
2、培养学生独立分析和解决工程实际问题的能力;
3、培养计算机应用、文献查阅、报告撰写等基本技能;
4、培养学生的团队协作精神、严肃认真的治学态度和严谨求实的工作
作风。
二、组合模型的方案拟定
1、创意模型的名称
立体车库
2、创意模型的工艺路线
按开关1(3,5,7)按开关2(4,6,8)1号车库进车 1号车库显示有车 1号库出车
2号车库进车 2号车库显示有车 2号库出车
3号车库进车 3号车库显示有车 3号库出车
4号车库进车 4号车库显示有车 4号库出车
3、创意模型的执行机构方案
进车—电机带动传送带传动
取车—电机带动传送带传动
运车台升降—电机带动传送带传动
4、创意模型的驱动方式
电动驱动
5、创意模型的传动方案
齿轮传动
6、创意模型的控制方案
由电脑中的程序控制模型进行整体运动。
模型中的开关进行局部控制电机,带动齿轮和传送带传动。
7、方案简图
方案说明:前面为运车升降台,可实现垂直和水平运动,将车送入车库。
升降台后面为四个示例车库,内有传送带,可实现车的传入送出。
右边的八个开关分别控制各车库的进车,出车。
以车库一为例,向车库一送车时,按开关一;要将车库一中的车取出时,按开关二。
三、 组合模型功
1、 动力系统功能
2、 控制系统功能
智能接口板由电脑输入信号 去控制电动机、开关。
电动机可以产生动力,通过
齿轮把能量传递给传送带。
3、执行系统功能
开关:8个开关分别控制各
层车库的进车出车情况。
传送带:电机将动力传递给传
送带,传送带运动,带动小车
前进。
运车升降台:由电机控制,可
实现水平和垂直运动。
4、模型总体布局图
四、模型控制线路
1、控制线路图
2、程序图及说明板1:
程序说明:
板2:
程序说明:
五、模型的设计意义
为了有效利用空间,我们构想了这个立体车库。
人们可根据住宅的大小随意选择车库的层数和个数,还可以建立大型的商业停车车厂。
它完全实现自动化,只通过按钮控制就可以取车送车,操作安全方便。