理论力学第5章
合集下载
理论力学PPT课件第5章 动量定理、质点系动量定理、质点系动量矩定理
F F
1.三个圆盘的运动是否一样? 2.三个圆盘的质心的运动是否一样?
2019年9月19日
14
例2 曲柄滑槽机构。已知 ,OAl,BGl ,
2
G为导杆重心。曲柄、滑块、导杆质量 分别为 m1,m2 ,m3 . 试求支座o处动约束力。
y
A
o
G
B
x
2019年9月19日
15
偏心电机
e m2
F Oy
矢量,瞬时量,单位:kg.m/s
投影式:
px mivix mvcx py miviy mvcy pz miviz mvcz
2019年9月19日
3
思考: 1.已知m,r, 比较两环 p1 , p2 大小
m
m
2m
vc
c
r
r
解: p 1 m r m 2 r 3 m r
故动约束力矩
M O ( F N 2 ) q v( r 2 v 2 r 1 v 1 )
2019年9月19日
45
2 .投影式:
①微分投影式
dLox dt
M
e 0x
dL0 y dt
M
e 0y
dL0 z dt
M
e 0z
②积分投影式
Lx2Lx1tt12M x edt M x(Iie) Ly2Ly1tt12M y edt M y(Iie) Lz2Lz1tt12M zedt M z(Iie)
对流体:FN2 qV(v2 - v1) v 1
对管道:FN' 2 FN2
O
-qV v1
F N2 F N 2
1.三个圆盘的运动是否一样? 2.三个圆盘的质心的运动是否一样?
2019年9月19日
14
例2 曲柄滑槽机构。已知 ,OAl,BGl ,
2
G为导杆重心。曲柄、滑块、导杆质量 分别为 m1,m2 ,m3 . 试求支座o处动约束力。
y
A
o
G
B
x
2019年9月19日
15
偏心电机
e m2
F Oy
矢量,瞬时量,单位:kg.m/s
投影式:
px mivix mvcx py miviy mvcy pz miviz mvcz
2019年9月19日
3
思考: 1.已知m,r, 比较两环 p1 , p2 大小
m
m
2m
vc
c
r
r
解: p 1 m r m 2 r 3 m r
故动约束力矩
M O ( F N 2 ) q v( r 2 v 2 r 1 v 1 )
2019年9月19日
45
2 .投影式:
①微分投影式
dLox dt
M
e 0x
dL0 y dt
M
e 0y
dL0 z dt
M
e 0z
②积分投影式
Lx2Lx1tt12M x edt M x(Iie) Ly2Ly1tt12M y edt M y(Iie) Lz2Lz1tt12M zedt M z(Iie)
对流体:FN2 qV(v2 - v1) v 1
对管道:FN' 2 FN2
O
-qV v1
F N2 F N 2
理论力学第五章

刚体做平面平行运动时,刚体中不在同一 直线上的任意三点到平面的距离相等,存 在三个约束条件,故刚体平面平行运动的 自由度为3
• 刚体的定点转动
若刚体上只有一个点固定不动,整个刚 体围绕此点转动,则此刚体做定点转动
刚体定点转动时,由于固 定点的3个坐标已经固定, 只剩下三个可以独立变化 的坐标变量,刚体定点转 动的故自由度为3
dT dW
• 三个定理所对应的守恒
动量守恒定律:刚体不受外力作用,或 外力相互抵消时,刚体的总动量守恒。 在某一方向力的分量为零,则在该方向 的动量分量守恒。
角动量守恒定律:刚体不受外力矩作用, 或外力矩相互抵消时,刚体的总角动量 动量守恒。在某一方向力矩的分量为零, 则在该方向的角动量分量守恒。
刚体做定轴转动时,刚体中的点(除转轴 上的点外)绕转轴做圆周运动,此时描述 刚体的运动只需要一个坐标变量,故刚体 绕定轴转动的自由度为1(描述刚体的转 动)
• 刚体的平面平行运动
若刚体内任意一点都平行于一固定平面 而运动,则此刚体做平面平行运动,刚 体中垂直于固定平面的直线上各点,其 运动状态完全相同,任何一个与固定平 面平行的刚体截面,其运动都可用来恰 当地代表刚体的运动
机械能守恒定律:作用于刚体的外力为 保守力时,刚体的总机械能守恒。刚体 只发生动能和势能的相互转换。
§5.4 刚体的定轴转动
刚体定轴转动的自由度为1
设量刚为体绕,转则轴角(速z轴度)为转:动r 的角&kr度变kr
刚体定轴转动的基本方程
质心定理:
m
d2rc dt 2
F (e)
F
FA
FB
刚体平动时的 动能
T
1 2
mvc2
1 2
mv2
理论力学第五章
30o
第一种情况: 第一种情况:
摩擦力阻止其向下运动
∑F
x
=0
Q min cos α + Fm − G sin α = 0
− Q min sin α + N − G cos α = 0
∑F
利用
y
=0
Fm = f s N
Q min sin α − f s cos α =G = 135.31 N cos α + f s sin α
[例4] 例
宽a,高b的矩形柜放置 , 的矩形柜放置 a 在水平面上,柜重 ,重心C 在水平面上,柜重P,重心 在其几何中心,柜与地面间 在其几何中心, F h P C 的静摩擦因数是 fs,在柜的 b 侧面施加水平向右的力F, 侧面施加水平向右的力 , 求柜发生运动时所需推力F 求柜发生运动时所需推力 的最小值。 的最小值。
再以整体为对象, 再以整体为对象,有平衡方程 整体为对象
∑X = 0
FAx − FBx = 0
FAx = FBx = 72.17 N
下面判断系统是否处于静平衡 脚端A 极限静摩擦力分别为 脚端 与B 的极限静摩擦力分别为 :
r y
C
Fm A = f s A FAy = 75 N
r G
Fm B = f s B FBy = 75 N
解:
取矩形柜为研究对象,受力分析如图。 1 .假设不翻倒但即将滑动,考虑临界平衡。
y
列平衡方程
∑F = 0,
x
F − FA − FB = 0
F P
C
∑F
FB
x
y
= 0,
FNA + FNB − P = 0
FB = fs × FNB
第一种情况: 第一种情况:
摩擦力阻止其向下运动
∑F
x
=0
Q min cos α + Fm − G sin α = 0
− Q min sin α + N − G cos α = 0
∑F
利用
y
=0
Fm = f s N
Q min sin α − f s cos α =G = 135.31 N cos α + f s sin α
[例4] 例
宽a,高b的矩形柜放置 , 的矩形柜放置 a 在水平面上,柜重 ,重心C 在水平面上,柜重P,重心 在其几何中心,柜与地面间 在其几何中心, F h P C 的静摩擦因数是 fs,在柜的 b 侧面施加水平向右的力F, 侧面施加水平向右的力 , 求柜发生运动时所需推力F 求柜发生运动时所需推力 的最小值。 的最小值。
再以整体为对象, 再以整体为对象,有平衡方程 整体为对象
∑X = 0
FAx − FBx = 0
FAx = FBx = 72.17 N
下面判断系统是否处于静平衡 脚端A 极限静摩擦力分别为 脚端 与B 的极限静摩擦力分别为 :
r y
C
Fm A = f s A FAy = 75 N
r G
Fm B = f s B FBy = 75 N
解:
取矩形柜为研究对象,受力分析如图。 1 .假设不翻倒但即将滑动,考虑临界平衡。
y
列平衡方程
∑F = 0,
x
F − FA − FB = 0
F P
C
∑F
FB
x
y
= 0,
FNA + FNB − P = 0
FB = fs × FNB
理论力学(第5章)

i
i
1
2
s
或 ri ri q1 , q2 ,...qs , t
i 1, 2,..., n, s 3n
y
例
一质点约束在半径为R的圆周上运动
自由度s=1,以θ为广义坐标
x R cos y R sin z 0
R θ
x
§5.2 虚功原理
y
B( xB , yB ) vB r
O
yB r
x
为几何约束方程。
xB r 0 为运动约束方程。
运动约束方程的一般形式为
C
f r ( x1 , y1 , z1, , xn , yn , zn , x1, y1, z1 , , xn , yn , zn ) 0
c
o
r
C
由虚功原理得
W mg yC 0
α x
l l yC (2r cos )sin r sin 2 sin y 2 2 l c yC 2r cos 2 cos cos 2 2r
代入
W
W mg yC 0
几何约束或其约束方程能够积分的运动约束称为 完整约束。 如果在约束方程中显含坐标对时间的导数,并且 不可以积分,这种约束称为非完整约束。 本章只研究定常的双面的完整的几何约束问题。
约束的分类小结
稳定约束
不稳定约束 运动约束 (微分约束)
f x, y, z 0 f x, y, z, t 0 f x, y, z 0 f x, y, z, t 0
c 2 2r 2 cos 2 2r 2
理论力学第五章
(1) (2)
FS1 f s FN 1 (3)
解得: F1
F 设物块有下滑趋势时,推力为, 2 画物块受力图:
Fx 0,
Fy 0,
sin f s cos P cos f s sin
F2 cos P sin Fs 2 0 F2 sin P cos FN 2 0
r (b f s c) f s Ra
例5-5 已知:均质木箱重 求: (1)当D处拉力
o P 5kN , f s 0.4 , h 2a 2m , 30 ;
F 1kN 时,木箱是否平衡?
(2)能保持木箱平衡的最大拉力.
解: (1)取木箱,设其处于平衡状态.
Fx 0
求:拉动拖车最小牵引力 F( F 平行于斜坡).
解: 取整体
Fx 0
Fy 0
F FAs FBs P sin 0 FAN FBN P cos 0
M A MB 0
(1)
(2)
M B 0
FAN (a b) Fh P cos b P sin H
共有 FD , FC , F , FND 四个未知数
在 f D 0.3 时,解得 F 4.62 N
D 即在 f D 0.3 时, 处不会先滑动.
当 f D 0.15 时,解得 FND 172.4N
FD F C f D FND 25.86N
C 处无滑动
Fmin 47.81N .
第五章
摩 擦
摩擦
滑动摩擦 滚动摩擦 干摩擦 湿摩擦
静滑动摩擦 动滑动摩擦 静滚动摩擦 动滚动摩擦
理论力学第五章
6
例1
如图所示起重杆A端用球形铰链固定在地面上,B端用绳 CB和DB拉住,连线CD平行于 x 轴。已知:CE=EB=DE,
=30,CDB平面与水平面的夹角 EBF=30 ,重物
P=10 kN,试求起重杆所受的压力和绳的拉力。
7
解: 取节点B 为研究对象,受力分 析如图。由空间汇交力系的平 衡方程有:
通过O点作任一轴Z,则:
mz (F )mz (Fxy )2OA'B'
由几何关系: OABcosg OA'B' 所以: 2OABcosg 2OA'B'
即: mO (F ) cosg mz (F )
[mO (F )]z mz (F )
定理:力对点的矩矢在通过该点的任意轴上的投影等于这力
对于该轴的矩。这就是力对点之矩与对通过该点轴之矩的关系18。
MO (mx (F ))2 (my (F ))2 (mz (F ))2
所以空间任意力系的平衡方程为:
X 0,mx (F )0 Y 0,my (F )0
还有四矩式,五矩式和六矩式, 同时各有一定限制条件。
Z 0,mz (F )0
29
空间汇交力系的平衡方程为:
X 0 Y 0 Z 0
因为各力线都汇交于一点,各轴都通过 该点,故各力矩方程都成为了恒等式。
g
O
q
Fxy
大小: F F
作用点:在物体的哪点就是哪点 方向:
由、、g三个方向角确定
2
2、一次投影法(直接投影法) 由图可知:
X Fcos, Y Fcos , Z Fcosg
3
3、力沿坐标轴分解:
若以 Fx ,Fy ,Fz 表示力沿直角
理论力学第5章(点的运动)
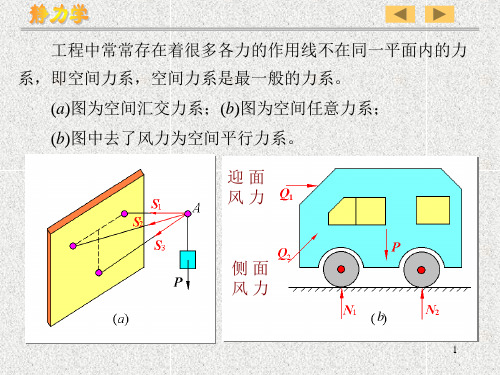
包括几何静力学、分析静力学
(2) 运动学: 研究点与刚体运动的几何性质。
包括位移、轨迹、速度、加速度。 (与力无关、也是变形体运动基础)
A B
F
C
B
刚体运动
C
变形(包含刚体位移和相对位移)
(3) 动力学: 研究物体所受力与运动间的关系。
包括质点系、刚体,变形体的动力效应。
第五章 点的运动学
§5-1 运动学的基本概念
速度
已知: OC AC BC l , MC a , t。 求:运动方程、轨迹、速度和加速度。
x l a cost ax v x 2 a y vy y l a sin t
2
加速度
a a a
F ( x, y) 0
二、点的速度v
又
r = xi + yj + zk
式中 v x 所以得
dr dx dy dz v i j k dt dt dt dt v = vx i + vy j + vz k
、v y
、v z
vx
dx dt
v
表明:“动点的速度在坐标轴上的投影,等于动点对应的位置 坐标对时间 t 的一阶导数”。 则速度的大小和方向余弦为
弧坐标的运动方程sf切向加速度表示速度大小的变化三点的加速度法向加速度表示速度方向的变化匀速运动v常数常数常数匀变速直线运动匀速圆周运动匀速直线运动或静止直线运动匀速运动圆周运动匀速运动直线运动匀速曲线运动匀变速曲线运动点作曲线运动画出下列情况下点的加速度方向
(1) 静力学: 研究物体所受力系的简化、平衡规律及其应用。
△r称为在△t时间内动点M的位移。
间间隔△t内的平均速度。以 v*表示。则: Δr v Δt 平均速度表示动点在△t内平均运动的快慢和运动方向。
(2) 运动学: 研究点与刚体运动的几何性质。
包括位移、轨迹、速度、加速度。 (与力无关、也是变形体运动基础)
A B
F
C
B
刚体运动
C
变形(包含刚体位移和相对位移)
(3) 动力学: 研究物体所受力与运动间的关系。
包括质点系、刚体,变形体的动力效应。
第五章 点的运动学
§5-1 运动学的基本概念
速度
已知: OC AC BC l , MC a , t。 求:运动方程、轨迹、速度和加速度。
x l a cost ax v x 2 a y vy y l a sin t
2
加速度
a a a
F ( x, y) 0
二、点的速度v
又
r = xi + yj + zk
式中 v x 所以得
dr dx dy dz v i j k dt dt dt dt v = vx i + vy j + vz k
、v y
、v z
vx
dx dt
v
表明:“动点的速度在坐标轴上的投影,等于动点对应的位置 坐标对时间 t 的一阶导数”。 则速度的大小和方向余弦为
弧坐标的运动方程sf切向加速度表示速度大小的变化三点的加速度法向加速度表示速度方向的变化匀速运动v常数常数常数匀变速直线运动匀速圆周运动匀速直线运动或静止直线运动匀速运动圆周运动匀速运动直线运动匀速曲线运动匀变速曲线运动点作曲线运动画出下列情况下点的加速度方向
(1) 静力学: 研究物体所受力系的简化、平衡规律及其应用。
△r称为在△t时间内动点M的位移。
间间隔△t内的平均速度。以 v*表示。则: Δr v Δt 平均速度表示动点在△t内平均运动的快慢和运动方向。
理论力学第五章

vz z 4, a z 0 z
2 2 2 2 从而 v vx vy vz2 80m s, a ax a y az2 32m s2
dv at 0, an a 32 m/s 2 dt
v2 故 2.5m an
例 已知:椭圆规的曲柄OC 可绕定轴O 转动,其端点C 与规尺
AB 的中点以铰链相连接,而规尺A,B 两端分别在相互垂
直的滑槽中运动, OC AC BC l , MC a, ωt 求:① M 点的运动方程; ② 轨迹;
③ 速度;
④ 加速度。
解: 点M作曲线运动,取坐标系Oxy如图所示。
外啮合齿轮
分析齿轮上一点的运动
§ 5-3
自然法
自然法:利用点的运动轨迹建立弧坐标和自然轴系,利用它们 描述和分析点的运动的方法。 1.弧坐标 2.自然轴系
s f (t )
切向单位矢量
主法线单位矢量
n
b n
副法线单位矢量
曲线在P点的密切面形成
自然坐标轴的几何性质
l 2 a 2 2al cos 2 t vx (l a ) sin t cos(v , i ) v l 2 a 2 2al cos 2 t vy (l a) cos t cos(v , j ) v l 2 a 2 2al cos 2 t
加速度
y
v
M
2
A
a x 4 Rω 2 cos 2ωt x
a y 4 Rω sin 2ωt y
2
a
x
O
R
x y 大小 a 2 2 4Rω 2
ax cos (a,i ) cos 2ωt cos (π 2ωt) a 方向如图。 π ay cos (a,j ) sin 2ωt cos( 2ωt ) a 2
2 2 2 2 从而 v vx vy vz2 80m s, a ax a y az2 32m s2
dv at 0, an a 32 m/s 2 dt
v2 故 2.5m an
例 已知:椭圆规的曲柄OC 可绕定轴O 转动,其端点C 与规尺
AB 的中点以铰链相连接,而规尺A,B 两端分别在相互垂
直的滑槽中运动, OC AC BC l , MC a, ωt 求:① M 点的运动方程; ② 轨迹;
③ 速度;
④ 加速度。
解: 点M作曲线运动,取坐标系Oxy如图所示。
外啮合齿轮
分析齿轮上一点的运动
§ 5-3
自然法
自然法:利用点的运动轨迹建立弧坐标和自然轴系,利用它们 描述和分析点的运动的方法。 1.弧坐标 2.自然轴系
s f (t )
切向单位矢量
主法线单位矢量
n
b n
副法线单位矢量
曲线在P点的密切面形成
自然坐标轴的几何性质
l 2 a 2 2al cos 2 t vx (l a ) sin t cos(v , i ) v l 2 a 2 2al cos 2 t vy (l a) cos t cos(v , j ) v l 2 a 2 2al cos 2 t
加速度
y
v
M
2
A
a x 4 Rω 2 cos 2ωt x
a y 4 Rω sin 2ωt y
2
a
x
O
R
x y 大小 a 2 2 4Rω 2
ax cos (a,i ) cos 2ωt cos (π 2ωt) a 方向如图。 π ay cos (a,j ) sin 2ωt cos( 2ωt ) a 2
理论力学第五章

M Z Fxy M 0 Fxy Fxy d
0 OA 0
'
有两种特殊情况使力对轴之矩为零:
1 2
当力F与转 轴z平行时, 即F=Fz, Fxy=0,力对 z轴之矩 Mz(F)=0.
当力F与转 轴z相交时, 即d=0,力 对z轴之矩 Mz(F)=0.
概括为
当力与轴共面时,力对轴之矩为零。
力对轴之矩
力使物体绕该点转动效应的度量。
M O (F ) F d
M O (F ) =2⊿AOB=Fd ,
+
-
2倍⊿的面积。 在平面中:力对点的矩是代数量。
二、力对轴之矩
FZ对z轴 之矩为零。
Fx、Fy产生使 门绕z轴转动的 效应
力对轴之矩是力使物体绕该轴转动效应的度量,它等于力在垂 直于该轴的平面上的分力对轴与平面的交点之矩。
三、合力矩定理在力对轴之矩计算中的应用
将F分解为
Fx、Fy、Fz
各分力对 轴之矩
计算其代数和
M x F M x Fx M x Fy M x Fz M x Fx M y Fy M z Fz M y F M y Fx M y Fy M y Fz
R Fi
mO ( R) mO ( Fi )
rC R r1 F1 r2 F2 rn Fn
rC F1r1 F2 r2 Fn rn Fi ri R Fi
设 心 C的 标 重 坐 为 x C、y C、z C , 任 微 部 的 标 一 小 分 坐 x i、y i、z i , , 即 对x、y、z轴 别 用 力 定 分 应 合 矩 理
Z F cosg F sin
理论力学第五章——点的运动

'
'
当Δt 0, Δv/Δt的极限称为点在瞬时t的加速度:
v dv d 2 x a lim 2 x t 0 t dt dt
5.1 点的直线运动
已知加速度或速度方程, 采用积分法 求运动方程 ,积 分常数由运动初始条件决定。 dv a dv adt dt v t dv adt
由于
dτ dτ ds dτ ds v n dt dt ds ds dt
所以
dv v a τ n dt
2
5.4 自然法
4 点的切向加速度和法向加速度
dv v a τ n dt
上式表明加速度矢量a是由两个分矢量组成:分矢量at 的方向永远沿轨迹的切线方向,称为切向加速度,它 表明速度代数值随时间的变化率;分矢量 an的方向永 远沿主法线的方向,称为法向加速度,它表明速度方 向随时间的变化率。
2 t 2
2
at tan | | 0.25 an
2
5.4 自然法
全加速度为aτ和an的矢量和
a at an
全加速度的大小和方向由下列二式决Leabharlann : 大小:a at an
2
2
方向:
at an cos(a ,t ) , cos(a ,n ) a a
5.4 自然法
如果动点的切向加速度的代数值保持不变,则动 点的运动称为匀变速曲线运动。现在来求它的运动规 律。 at c
dτ τ j 1 lim lim n n ds s 0 s s 0 s
t"
5.4 自然法
3 点的速度
r s ds v lim lim t 0 t t 0 t dt
'
当Δt 0, Δv/Δt的极限称为点在瞬时t的加速度:
v dv d 2 x a lim 2 x t 0 t dt dt
5.1 点的直线运动
已知加速度或速度方程, 采用积分法 求运动方程 ,积 分常数由运动初始条件决定。 dv a dv adt dt v t dv adt
由于
dτ dτ ds dτ ds v n dt dt ds ds dt
所以
dv v a τ n dt
2
5.4 自然法
4 点的切向加速度和法向加速度
dv v a τ n dt
上式表明加速度矢量a是由两个分矢量组成:分矢量at 的方向永远沿轨迹的切线方向,称为切向加速度,它 表明速度代数值随时间的变化率;分矢量 an的方向永 远沿主法线的方向,称为法向加速度,它表明速度方 向随时间的变化率。
2 t 2
2
at tan | | 0.25 an
2
5.4 自然法
全加速度为aτ和an的矢量和
a at an
全加速度的大小和方向由下列二式决Leabharlann : 大小:a at an
2
2
方向:
at an cos(a ,t ) , cos(a ,n ) a a
5.4 自然法
如果动点的切向加速度的代数值保持不变,则动 点的运动称为匀变速曲线运动。现在来求它的运动规 律。 at c
dτ τ j 1 lim lim n n ds s 0 s s 0 s
t"
5.4 自然法
3 点的速度
r s ds v lim lim t 0 t t 0 t dt
理论力学课件 第5章

• 2. 动滑动摩擦 • 当拉力F1超过静摩擦力的最大值时Fmax ,物 体将在水平面上滑动。此时物体受到的摩 擦力为动滑动摩擦力。动滑动摩擦也与物 体受到的压力FN成正比, • F = f FN • 如果拉力与动摩擦力相等F1 = f FN,物体作 匀速运动。 • 如果拉力大于动摩擦力F1 > f FN,物体作加 速运动。
§5-2 摩擦角和自锁现象
• 1. 摩擦角 • 摩擦力也属于约束力。静摩擦力与法 向约束力(压力)的合力称为全约束 力。全约束力与法线的夹角的最大值 φf 称为摩擦角。
FRA FN Fs tan f Fmax FN f s FN FN fs
• 2. 自锁现象 • 如果摩擦力没有达到最大值Fs < Fmax ,则全 约束力在摩擦锥的内部。全约束力与法线 的夹角小于摩擦角, • 0<φ<φf 。 • 这时,如果全主动力(如重力、拉力的合力) 也在摩擦锥内部,无论全主动力有多大, 全约束力都能与全主动力平衡。此则自锁 现象。反之,全主动力在摩擦锥的外部, 无论这个全主动力多么小,全约束力都不 能平衡全主动力。物体比发生运动。
y
Fs f s FN 解得: F1max P
• 当水平力达到极小值时, • 要保证物体不能向下滑动。
F F
x
0 : F1 cos P sin Fs 0 0 : F1 sin P cos FN 0 sin f s cos cos f s sin
第五章 摩擦
• §5-1 滑动摩擦 • 1. 静滑动摩擦 • 物体放在粗糙的水平面上,对物体施 加一个水平拉力F1,此时物体受到一 个静摩擦力Fs,静摩擦力的方向与物 体的运动趋势方向相反。当拉力F1不 很大时,拉力F1与摩擦力Fs相等, F1 = Fs 。此时物体仍未运动。
理论力学第5章

1、 滑动摩擦 一. 静滑动摩擦定律 摩擦力Fs 方向: 恒与物体相对滑动的
滚动摩擦
Fs
N 趋势方向相反 大小: 一般状态下由平衡方程确定,当物体处于将动未动的临界状态 时,由静滑动摩擦定律计算.
Fmax= f N
N: 法向约束力 f: 静滑动摩擦系数,为常数,由材料决定
因此,
0≤ Fs ≤ Fmax
取左拱 AC,其受力图如图 (c)所示
系统整体受力图如图 (d)所示
考虑到左拱AC 三个力作用下 平衡,也可按三力平衡汇交定 理画出左拱 AC的受力图,如 图(e)所示
此时整体受力图如图(f) 所示
讨论:若左、右两拱都考 虑自重,如何画出各受力 图?
如图 (g) (h)(i)
例5 不计自重的梯子放在光滑水 平地面上,画出梯子、梯子 左右两部分与整个系统受力 图.图(a)
(1)柔索约束——张力 FT
(2)光滑面约束——法向约束力 FN
(3)光滑铰链—— FAy FAx
(4)滚动支座—— FN ⊥光滑面
球铰链——空间三正交分力 止推轴承——空间三正交分力
二、受力图
1、取研究对象(隔离体)—将所要研究的物体从周围物体中单独 拿出来
2、在其上画出所有的力(主动力、约束力和惯性力)。 例1:分别画出圆及杆AB的受力图。 B 解: P B SBC N2
M max FN 最大滚动摩阻(擦)力偶
0 Fs Fmax
0 M f M max
滚动摩阻(擦)系数,长度量纲
的物理意义
使圆轮滚动比滑动省力的原因 处于临界滚动状态
M max FN F1R
F1
R
FN
处于临界滑动状态
理论力学-第五章ppt课件

注意,由于不可能大于90, 所以梯子平衡倾角 应满足
3068'7 900
ppt精选版
19
§5-4 滚动摩擦
由实践可知,使滚子滚动比使它滑动省力,下图的受力分析 看出一个问题,即此物体平衡,但没有完全满足平衡方程。
X0,QF0 Y0,PN0 MA0,Qr0(不成立)
出现这种现象的原因是,
实际接触面并不是刚体,它们
m A 0 ,P 2 l cm o F B i s l n cm o N i B s l n sm i 0 n i n ( 3 )
解 :N 得 A 1 P f2,N B 1 ffP 2,F B P 1 P f2代 (3 )入
得 :m ianr1 c 2fft2g ar1 c 2 0 0 .t5 .5 2 g 308 6'7
生 平移)求Q
由于
T'F1fAN1 0.550025N 0
1
ppt精选版
33
分析轮有 T0.5 50 205 n 0 iQ c n( o 1 1 s c 0 0 ) o 0
1T 5 1Q [ 0s 2i c n2 o c so ] 0 s
ff
0.4
ppt精选版
31
[练习1] 已知:Q=10N, f '动 =0.1 f 静 =0.2 求:P=1 N; 2N, 3N 时摩擦力F?
解: F m afx 静 N 0 .2 1 0 2 N
P 1 N 时 ,由 X 0 ,F P 1 N (没动,F 等于外力)
P 2 N 时 ,由 X 0 ,F P 2 N (临界平衡)
二、动滑动摩擦力:(与静滑动摩擦力不同的是产生了滑动)
大小: F' f'N
理论力学 第五章 平面图形的几何性质

10
y
2)、求形心
xc
Ax
A
i ci
A1 xc1 A2 xc 2 A1 A2
C2
c(-20.3;34.7)
C1 80
35 1100 20.3(mm) 10 110 80 10
i ci
x
yc
A y
A
A1 y c1 A2 y c 2 A1 A2
60 1100 34.7(mm) 10 110 80 10
§5-3
极惯性矩
y
dA
定义:I p dA
2 A
I p:极惯性矩
极惯性矩恒为正 单位:长度4
x
O
圆截面
d
2
I p A dA
1、实心圆截面——
O
d
I P dA 2 d
2 2 A A
d 2 0
1 4 2 d d 32
y 10
A2 1200mm2 , xc 2 5mm, yc 2 60mm
2)、求形心
C2
120
c(19.7;39.7)
C1
A1 xc1 A2 xc 2 zc A A1 A2 45 700 5 1200 19.7mm) 700 1200
i ci
Ax
80
2 2 A A 2 A c 2 2 A A
y
I x I xc a 2 A I y I yc b A
2
yc xc
x
b
c
a
y
dA yc
xc
——平行移轴公式
o
x
•图形对任意轴的惯性矩,等于图形对于与该轴平 行的形心轴的惯性矩加上图形面积与两平行轴间距 平方的乘积;
y
2)、求形心
xc
Ax
A
i ci
A1 xc1 A2 xc 2 A1 A2
C2
c(-20.3;34.7)
C1 80
35 1100 20.3(mm) 10 110 80 10
i ci
x
yc
A y
A
A1 y c1 A2 y c 2 A1 A2
60 1100 34.7(mm) 10 110 80 10
§5-3
极惯性矩
y
dA
定义:I p dA
2 A
I p:极惯性矩
极惯性矩恒为正 单位:长度4
x
O
圆截面
d
2
I p A dA
1、实心圆截面——
O
d
I P dA 2 d
2 2 A A
d 2 0
1 4 2 d d 32
y 10
A2 1200mm2 , xc 2 5mm, yc 2 60mm
2)、求形心
C2
120
c(19.7;39.7)
C1
A1 xc1 A2 xc 2 zc A A1 A2 45 700 5 1200 19.7mm) 700 1200
i ci
Ax
80
2 2 A A 2 A c 2 2 A A
y
I x I xc a 2 A I y I yc b A
2
yc xc
x
b
c
a
y
dA yc
xc
——平行移轴公式
o
x
•图形对任意轴的惯性矩,等于图形对于与该轴平 行的形心轴的惯性矩加上图形面积与两平行轴间距 平方的乘积;
《理论力学》课件 第5章
因而 dBA/dt 0 ,于是得
vA vB
将上式再求一次导数,则得
aA aB
例5-1
如图5-4所示的曲柄滑道机构,当曲柄 OA 在平面上绕定轴 O 转动 时,通过滑槽连杆中的滑块 A 的带动,可使连杆在水平槽中沿直
线往复滑动。若曲柄 OA 的长为 r ,曲柄与 x 轴的夹角为 t,
其中 是常数,求此连杆在任一瞬时的速度及加速度。
根据上述结论,可作出截面上各点的加速度的分布图,在通过轴心的 直线上,各点的加速度按线性分布,将加速度矢的端点连成直线,此 直线通过轴心,如图5-10(b)所示。
(a)
图5-10
(b)
例5-3
如图5-11所示,一半径 R 0.2 m 的圆轮绕定轴O 的转动方程
为 t2 4t , 单位为rad, t单位为s。求 t 1 s 时,轮
*
t
当 t 趋近于零时,刚体转动的瞬时角加速度为
lim * lim d
t 0
t0 t dt
刚体绕定轴转动的角加速度等于角速度对于时间的一阶导数,
或等于转角对于时间的二阶导数。
角加速度与角速度一样都是代数量,它的单位是 rad/s2
若 与 的符号相同,则角速度的绝对值随时间而增加,这 时称为加速转动;反之,若 与 的符号相反,则角速度
例
设有平动的刚体,在刚体上任取两点 A 和 B ,并连成一直线如
图5-3所示。运动开始时 AB 线在 A0B0 的位置;经过极短时间间 隔 t 之后,移至 A1B1 ;依次再继续移至 A2B2 , ,AnBn 等。
首先证明这两个任意点的轨迹形状是完全 相同的,根据刚体的定义得知 A,B 两点间 的距离保持不变。 因此 AB A0B0 A1B1 A2B2 AnBn
理论力学 第五章
其中t为自变量,q为力学系统的广义坐标. 当自变量t有微小增量dt时,对应 的函数q的微小增量的线性主部dq 称为函数的微分,记为
5
6
3. 变分法简介
a. 变分法
7
8
b. 变分法的研究对象
(1) 最速降线问题:重力场中 A 滑到 B 所需时间最少. 结论:最速降线为一旋轮线
xA A xB x
2 2 2
k m r
2
p
H
0
L 2 p mr c
Q Q (q, p, t ) P P ( q, p, t )
角动量守恒
变换正则变量
q , p Q , P
( 1,2, s )
要求从 H (q, p, t ) 变到
路径;在相同条件下,系统为约束所允许的与真实路径非常 临近的任一可能运动以图中虚线AM'B表示,此曲线称为可能 路径. 12
在任一瞬时t,可能路径对真实路径的偏离用等时变分 q 表
示,真实路径上M点的坐标为 ( q , t ) ,而可能路径上对应的 M' 点的坐标为 ( q q , t ) ,则
s
1
母函数 U 2 ( q , P , t ) ,且
Q p q P U 2 H * H 1, 2 , s t
U 2
U 2
3.将(1)式两端分别加上【(b)—(a)】式两端得
s
( Q dP q dp ) ( H d U ( q , Q , t )
(3) 等周问题:封闭线所围面积最大时, 封闭线的形状 .
A
1 2
理论力学第五章课件

而
4.点沿曲线运动。指出点的运动状态?
v a
a
v
a
v
匀速
×
a
a v
×
v
a
减速
v=0
加速
凸轮机构 已知 段,设计凸轮轮廓线。
ω,使顶杆AB匀速 u上升一
B
A
O
ω
在凸轮上建立极坐标ρ,ϕ
dϕ dρ = ω, =u 有 dt dt
B
ϕ 且 t = 0 时, = 0, ρ = R。积分得
D
ϕ=ω t,
不对。
Qt = 0 时
M
r
ϕ
C
由上述方程得 x = y = 0 ,
x 而t>0时, < 0 。显然原点O移动了。
⎧ x = r (ω t − sin ω t ) ⎪ 应为 ⎨ 摆线。 y = r (1 − cos ω t ) ⎪ ⎩
o′
x o
& & 2.图(a) 中 x = u 对吗?图(b)中 ϕ = ω 对吗?
a2 = a2 n π4 = 40 m ⋅ s-2
E
且 a2 沿半径 B2A。
例
半径是 r 的车轮沿固定水平轨道滚动而不滑动(如图)。
轮缘上一点M,在初瞬时与轨道上的O点叠合;在瞬时t半径MC 与轨道的垂线HC 组成交角为φ,已知轮心C 的速度u 是常矢量。 试求M点的轨迹、速度、加速度求轨迹的最大曲率半径。
滑块B的速度和加速度分别为
v= dx 1 r ⎛ ⎞ sin 2 ω t ⎟ ≈ − r ω ⎜ sin ω t + dt 2 l ⎝ ⎠
⎞ r d2x 2⎛ a= ≈ − r ω ⎜ cos ω t + cos 2ω t ⎟ 2 ⎜ ⎟ j dt ⎝ ⎠
相关主题
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
v0 x x0 1 e kt k
x
x0
dx v0e kt dt
0
t
§ 5-3
自然法
自然法:利用点的运动轨迹建立弧坐标和自然轴系,利用它们 描述和分析点的运动的方法。 1.弧坐标 2.自然轴系
s f (t )
切向单位矢量
主法线单位矢量
n
b n
2 l 2 a 2 2al cos 2t
ax (l a ) cos t cos(a , i ) a l 2 a 2 2al cos 2t ay (l a ) sin t cos(a , j ) a l 2 a 2 2al cos 2t
加速度
x l a 2 cos t ax v x y l a 2 sin t ay v y 2 2 2 2 4 a ax a y l a 4 cos 2 t (l a) sin 2 t
a a 2 t a 2 n 0.308m/s 2
例5-5 已知点的运动方程为x=2sin 4t m,y=2cos 4t m, 求:点运动轨迹的曲率半径 。 z=4t m。 解: 由点M的运动方程,得
8 cos 4t , ax 32 sin 4t vx x x
xB r sin r sin( t )
B r cost vB x aB xB r 2 sin t 2 xB
B点的速度和加速度
例5-3 已知:如图所示,当液压减振器工作时,它的活塞在套 筒内作直线往复运动。设活塞的加速度 求:活塞的运动规律。
第五章 点 的 运 动 学
§5-1 矢量法
运动方程 r r t
速度
v dr dt r
单位
m/s
加速度
a
dv dt
d r
2
dt
2
v r
单位 m/s 2
提问:如何确定速度和加速度的方向?
矢端曲线
速度 矢径矢端曲线切线
方向同 n
所以
d 1 n ds
4.加速度
d dv dv a v dt dt dt
d d ds d v dt ds dt ds
则
dv v 2 a n at an n dt
dv d 2 s at 2 dt dt
v 故 2.5m an
2
练习题 1
如图所示为曲线规尺的各杆,长为OA=AB=200mm, CD=DE=AC=AE=50mm。如杆OA以等角速度ω =π /5 (rad/s) 绕O轴转动,并且当运动开始时,杆OA水平向右,求尺上 点D的运动方程和轨迹。
练习题 1
练习题 2
如图所示,偏心凸轮半径为R,绕O轴转动,转角ϕ =ω t (ω 为常量),偏心距OC=e,凸轮带动顶杆AB 沿铅垂 直线作往复运动。试求顶杆的运动方程和速度。
副法线单位矢量
自然坐标轴的几何性质
3.速度
dr dr v dt ds 4.加速度 a
d d ds d v dt ds dt ds
ds ds v dt dt dv dv d v dt dt dt
因为
d d d d 1 ds d ds ds
dvz d 2 z az 2 dt dt
如图所示半径为r的圆轮沿水平面滚动, t , 求轮缘M点的运动方程。
y
rφ
M
O O
x r (t sin t ) y r (1 cost )
x
例 5-1 已知:椭圆规的曲柄OC 可绕定轴O 转动,其端点C 与规
尺AB 的中点以铰链相连接,而规尺A,B 两端分别在相互
垂直的滑槽中运动, OC AC BC l , MC a, ωt 求:① M 点的运动方程; ② 轨迹;
③ 速度;
④ 加速度。
解: 点M作曲线运动,取坐标系Oxy如图所示。
运动方程
x (OC CM ) cos (l a) cos t
y AM sin (l a) sin t
练习题 2
1 ds 2 an ( ) dt v2
——切向加速度 ——法向加速度
a a2 t a2n
如图所示,点M沿螺旋线自外向内运动,它走过的 弧长与时间成正比。试分析加速度如何变化。
M v
svt
例5-4 已知:列车沿半径为R=800m的圆弧轨道作匀加速
运动。如初速度为零,经过2min后,速度到达
dx vx dt
dy vy dt
dz vz dt
加速度
dv dvx dv y dvz a i j k ax i a y j a z k dt dt dt dt
dvx d 2 x ax 2 dt dt
ay dv y dt d2 y dt 2
8 sin 4t , a y 32 cos 4t vy y y
4, a z vz z z0
2 2 2 2 从而 v vx vy vz2 80m s, a ax ay az2 32m s2
dv at 0, an a 32 m/s 2 dt
消去t, 得轨迹
x2 y2 1 2 2 (l a) (l a)
速度
l a sin t vx x (l a) cos t vy y v vx 2 v y 2 (l a ) 2 2 sin 2 t (l a) 2 2 cos 2 t
l 2 a 2 2al cos 2 t vx (l a ) sin t cos(v , i ) v l 2 a 2 2al cos 2 t vy (l a) cos t cos(v , j ) v l 2 a 2 2al cos 2 t
54km/h。
求:列车起点和终点的加速度。
解: 列车作曲线加速运动。 由 at 常数 , v0 0
有 v at t
v 15m/s at 0.125m/s 2 t 120s
①
t 0, an 0
a at 0.125m/s 2
② t 2min 120s
v 2 (15m/s) 2 an 0.281矢端曲线切线
§5-2 直角坐标法
运动方程
x x (t ) y y (t ) z z (t )
直角坐标与矢径坐标之间的关系
r (t ) x t i y (t ) j z (t )k
速度
dr dx dy dz v i j k vx i v y j vz k dt dt dt dt
( v 为活塞的速度, k 为比例常数),初速度为 v0 。
a kv
解:
活塞作直线运动,取坐标轴Ox如图所示
dv 由 a kv dt v dv t 得 k dt v0 v 0
dx 由 v v0 e kt dt
得
v ln kt , v v0e kt v0
例5-2
已知:正弦机构如图所示。曲柄OM长为r,绕O轴匀速转动, 它与水平线间的夹角为 t ,其中 为t = 0时的夹角, 为一常数。动杆上A,B两点间距离为b。
求:点A和B的运动方程及点B的速度和加速度。
解: A,B点都作直线运动,取Ox轴如图所示。
运动方程
xA b r sin b r sin( t )