SPI通信.c
关于spi通信,发送接收共用一个中断

当不用FIFO时,只有一个中断,发送和接收共用一个,因为发送和接收是同时完成的:
例如主机上升沿发下降沿收,那么从机就必须上升沿收下降沿发,所以一串时钟过去之后,主机发送完了数据,从机也发送完了数据。
如果是无协议的收发,例如A发给B,B只负责收,那么A就不需要开启中断,因为都不需要去读数(对方都没真正发数据给你,收到的都是对方TXBUF保存的值)
如果是有协议的收发,例如主机A发0x01,代表叫B发一个频率的值过来,那么过程是这样的:
首先 A------>--------0X01------>------B 这个0x01含义是双方商定的
同时 A------<--------垃圾1----<------B 这个垃圾1是B自动发的,A不用读
然后 A------>--------垃圾2------>------B 这个垃圾2是为了产生时钟让B发送数据过来的
同时 A------<--------频率--------<------B 这个频率是B借住A虚发过程发送过来的
所以说发送和接收是同时完成的,如果中断使能之后,进是一定会进的,因为无论发送完毕还是接收完毕都会引起中断,读还是不读就得看收到的数是不是有意义的。
UARTIICSPI通信协议

UARTIICSPI通信协议UART(Universal Asynchronous Receiver Transmitter)是一种异步串行通信协议,它使用简单的电气和物理接口。
UART通信是双向的,即可以同时发送和接收数据。
在UART通信中,发送和接收数据的设备之间没有共享的时钟信号,所以数据传输的速率由设备的时钟精度和波特率决定。
UART通信只使用两根线来传输数据,分别是数据线(TX、RX)和地线。
UART通信广泛应用于各种串口设备,如计算机、微控制器、传感器等。
UART通信的简洁性和广泛适用性是它最大的优点,但它也有一些缺点,比如传输速率相对较低。
I2C(Inter-Integrated Circuit)是一种串行通信协议,用于连接微控制器和外围设备。
I2C通信是双向的,可以同时发送和接收数据。
在I2C通信中,数据传输通过两根线来完成,分别是串行数据线(SDA)和串行时钟线(SCL)。
I2C通信需要主设备和从设备之间的时钟同步,因此从设备无需使用独立的时钟源。
I2C通信具有多主机和多从机的能力,可以连接多个设备。
I2C通信广泛应用于各种外围设备,如传感器、存储器、显示屏等。
I2C通信的主要优点是使用的线数较少,可以连接多个设备,但传输速率较慢。
SPI(Serial Peripheral Interface)是一种串行通信协议,用于连接微控制器和外围设备。
SPI通信是全双工的,可以同时发送和接收数据。
在SPI通信中,数据传输通过四根线来完成,分别是主设备输出线(MOSI)、主设备输入线(MISO)、串行时钟线(SCK)和片选线(CS)。
SPI通信中的主设备通过片选线来选择从设备。
SPI通信可以实现高速数据传输,适用于要求实时性的应用。
SPI通信广泛应用于各种存储设备、显示器件和传感器等。
SPI通信的主要优点是传输速率较快,但需要的线数较多。
总的来说,UART、I2C和SPI是三种常用的串行通信协议,各自具有不同的特点和优缺点。
SPI通信协议详解

串行外设接口SPI通信协议详解什么是SPI?SPI的英文全称为Serial Peripheral Interface,顾名思义为串行外设接口。
SPI是一种同步串行通信接口规范,主要应用于嵌入式系统中的短距离通信。
该接口由摩托罗拉在20世纪80年代中期开发,后发展成了行业规范。
SPI通信的4种工作模式SPI通信中有4种不同的操作模式,不同的从机设备可能在出厂时就被设置好了某种模式,并且无法更改。
但是SPI通信必须处于同一种模式下才能进行。
因此我们应该对自己手里的SPI主机设备进行模式的配置,也就是通过CPOL(时钟极性)和CPHA(时钟相位)来控制SPI主设备的通信模式,具体如下:时钟极性(CPOL)定义了SCLK时钟线空闲状态时的电平:1.CPOL=0,即SCLK=0,表示SCLK时钟信号线在空闲状态时的电平为低电平,因此有效状态为高电平。
2.CPOL=1,即SCLK=1,表示SCLK时钟信号线在空闲状态时的电平为高电平,因此有效状态为低电平。
时钟相位(CPHA)定义了数据位相对于时钟线的时序(即相位):1.CPHA=0,即表示输出(out)端在上一个时钟周期的后沿改变数据,而输入(in)端在时钟周期的前沿(或不久之后)捕获数据。
输出端保持数据有效直到当前时钟周期的尾部边缘。
对于第一个时钟周期来说,第一位的数据必须在时钟前沿之前出现在MOSI线上。
也就是一个CPHA=0的周期包括半个时钟空闲和半个时钟置位的周期。
2.CPHA=1,即表示输出(out)端在当前时钟周期的前沿改变数据,而输入(in)端在时钟周期的后沿(或不久之后)捕获数据。
输出端保持数据有效直到下一个时钟周期的前沿。
对于最后一个时钟周期来说,从机设备在片选信号消失之前保持MISO信号线有效。
也就是一个CHPA=1的周期包括半个时钟置位和半个时钟空闲的周期。
Note:此处的前沿和后沿的意思表示在每个周期中第一个出现的边沿和最后一个出现的边沿。
串行通信协议在嵌入式系统中的应用试卷
串行通信协议在嵌入式系统中的应用试卷(答案见尾页)一、选择题1. 串行通信协议在嵌入式系统中主要用于:A. 数据传输B. 远程控制C. 系统间通信D. 以上都是2. 在嵌入式系统中,以下哪个不是常见的串行通信协议?A. RS-232B. SPIC. I2CD. HDMI3. 以下哪项不是串行通信协议的特性?A. 信号传输简单B. 只能传输数字信号C. 传输距离远D. 成本低4. 在选择串行通信协议时,通常需要考虑哪些因素?A. 传输速度B. 通信距离C. 抗干扰能力D. 以上都是5. 以下哪种设备通常使用串行通信协议进行数据传输?A. 打印机B. 键盘C. 鼠标D. 显示器6. 以下哪项不是串行通信协议中的帧格式?A. 同步帧B. 异步帧C. 空闲帧D. 广播帧7. 在使用串行通信协议时,为了确保数据的正确传输,通常需要考虑哪些因素?A. 波特率B. 数据位C. 奇偶校验D. 以上都是8. 以下哪种设备是串行通信协议中常用的从设备?A. 计算机B. 手机C. 微控制器D. 数字相机9. 在设计嵌入式系统时,选择串行通信协议需要考虑哪些因素?A. 系统的性能需求B. 电源限制C. 通信距离D. 以上都是10. 以下哪种情况不适合使用串行通信协议?A. 高速数据传输B. 长距离通信C. 高抗干扰能力要求D. 低功耗要求11. 以下哪项不是串行通信协议在嵌入式系统中常用的?A. I2CB. SPIC. USBD. HDMI12. 在嵌入式系统中,哪种串行通信协议具有高速度和低功耗的特点?A. I2CB. SPIC. USBD. HDMI13. 以下哪项是SPI通信协议的特点?A. 高速度B. 低功耗C. 高成本D. 易于使用14. IC通信协议中,主设备是如何与从设备进行通信的?A. 主设备发出命令,从设备响应B. 主设备发送数据,从设备接收C. 主设备与从设备同时发送和接收数据D. 以上都不对15. SPI通信协议中,主设备控制时钟信号的方式是?A. 主设备提供时钟信号B. 从设备提供时钟信号C. 双方设备共同提供时钟信号D. 以上都不对16. 以下哪种设备通常作为SPI通信协议的从设备?A. 微控制器B. 存储器C. 显示屏D. 扬声器17. USB通信协议主要用于哪种类型的设备连接?A. 高速外设B. 低速外设C. 有线连接D. 无线连接18. USB通信协议中的设备分类包括?A. HubB. 控制器C. 外设D. 上层软件19. 以下哪项不是USB通信协议中的传输类型?A. 控制传输B. 批量传输C. 端点传输D. 中断传输20. 在设计嵌入式系统时,选择适当的串行通信协议需要考虑哪些因素?A. 性能需求B. 功耗限制C. 连接设备的类型D. 系统成本21. 以下哪个是常用的串行通信协议?A. I2CB. SPIC. USBD. HDMI22. 以下哪个是SPI通信协议的特点?A. 高速度B. 低功耗C. 需要时钟信号D. 不支持多个设备同时连接23. 以下哪个是IC通信协议的数据传输方向?A. 单工B. 半双工C. 全双工D. 无方向性24. 以下哪个是USB通信协议的标准版本?A. USB 1.0B. USB 2.0C. USB 3.0D. USB 4.025. 以下哪个是SPI通信协议的典型应用场景?A. 网络通信B. 存储设备访问C. 传感器数据采集D. 显示器控制26. 以下哪个是IC通信协议在嵌入式系统中常见的应用?A. 传感器数据采集B. LED闪烁控制C. 键盘输入D. 触摸屏操作27. 以下哪个是USB通信协议在嵌入式系统中常见的应用?A. 网络通信B. 存储设备访问C. 打印机连接D. 无线模块通信28. 以下哪个是SPI通信协议在嵌入式系统中的常见实现方式?A. 基于硬件桥接B. 基于软件编程C. 基于专用控制器D. 基于通用处理器29. 以下哪个是IC通信协议在嵌入式系统中的常见实现方式?A. 基于硬件桥接B. 基于软件编程C. 基于专用控制器D. 基于通用处理器30. 以下哪个是USB通信协议在嵌入式系统中的常见实现方式?A. 基于硬件桥接B. 基于软件编程C. 基于专用控制器D. 基于通用处理器31. 在嵌入式系统中,串行通信协议通常用于:A. 高速数据传输B. 远距离通信C. 系统内部设备间通信D. 以上都是32. 以下哪项不是串行通信协议的特点?A. 信号传输简单B. 传输线路成本低C. 可靠性高D. 传输速度慢33. 串行通信协议中的波特率是指:A. 每秒传输的位数B. 信号的电平级别C. 数据的起始位34. 在嵌入式系统中,常用的串行通信协议有:A. RS-232B. SPIC. I2CD. 以上都是35. RS-协议主要用于:A. 近距离低速通信B. 近距离高速通信C. 远距离低速通信D. 远距离高速通信36. SPI协议的主要特点不包括:A. 高速传输B. 同步传输C. 信号线少D. 易于使用37. IC协议主要用于哪种类型的设备间通信?A. 高速电子设备B. 远距离传感器C. 复杂的电子设备D. 低功耗设备38. 以下哪项是串行通信协议在嵌入式系统中可能遇到的常见问题?A. 错误检测B. 信号干扰C. 数据丢失D. 以上都是39. 在设计嵌入式系统的串行通信协议时,主要考虑的因素包括:B. 通信距离C. 抗干扰能力D. 以上都是40. 什么是串行通信协议?它在嵌入式系统中的主要作用是什么?A. 串行通信协议是一种数据传输方式,用于在嵌入式系统中与外部设备进行数据交换。
STM32的SPI通信总结(含DMA)
STM32---SPI(DMA)通信的总结(库函数操作)本文主要由7项内容介绍SPI并会在最后附上测试源码供参考:1.SPI的通信协议2.SPI通信初始化(以STM32为从机,LPC1114为主机介绍)3.SPI的读写函数4.SPI的中断配置5.SPI的SMA操作6.测试源码7.易出现的问题及原因和解决方法一、SPI的通信协议SPI(Serial Peripheral Interface)是一种串行同步通讯协议,由一个主设备和一个或多个从设备组成,主设备启动一个与从设备的同步通讯,从而完成数据的交换。
SPI 接口一般由4根线组成,CS片选信号(有的单片机上也称为NSS),SCLK时钟信号线,MISO数据线(主机输入从机输出),MOSI数据线(主机输出从机输入),CS 决定了唯一的与主设备通信的从设备,如没有CS 信号,则只能存在一个从设备,主设备通过产生移位时钟信号来发起通讯。
通讯时主机的数据由MISO输入,由MOSI 输出,输入的数据在时钟的上升或下降沿被采样,输出数据在紧接着的下降或上升沿被发出(具体由SPI的时钟相位和极性的设置而决定)。
二、以STM32为例介绍SPI通信1.STM32f103 带有3个SPI模块其特性如下:2SPI 初始化初始化SPI 主要是对SPI要使用到的引脚以及SPI通信协议中时钟相位和极性进行设置,其实STM32的工程师已经帮我们做好了这些工作,调用库函数,根据自己的需要来修改其中的参量来完成自己的配置即可,主要的配置是如下几项:引脚的配置SPI1的SCLK, MISO ,MOSI分别是PA5,PA6,PA7引脚,这几个引脚的模式都配置成GPIO_Mode_AF_PP 复用推挽输出(关于GPIO的8种工作模式如不清楚请自己百度,在此不解释),如果是单主单从, CS引脚可以不配置,都设置成软件模式即可。
通信参数的设置1.SPI_Direction_2Lines_FullDuplex把SPI设置成全双工通信;2.在SPI_Mode 里设置你的模式(主机或者从机),3.SPI_DataSize是来设置数据传输的帧格式的SPI_DataSize_8b是指8位数据帧格式,也可以设置为SPI_DataSize_16b,即16位帧格式4.SPI_CPOL和SPI_CPHA是两个很重要的参数,是设置SPI通信时钟的极性和相位的,一共有四种模式在库函数中CPOL有两个值SPI_CPOL_High(=1)和SPI_CPOL_Low ( =0). CPHA有两个值SPI_CPHA_1Edge (=0) 和SPI_CPHA_2Edge(=1)CPOL表示时钟在空闲状态的极性是高电平还是低电平,而CPHA则表示数据是在什么时刻被采样的,手册中如下:我的程序中主、从机的这两位设置的相同都是设置成1,即空闲时时钟是高电平,数据在第二个时钟沿被采样,实验显示数据收发都正常。
SPI通信协议重点梳理

SPI是串行外设接口(Serial Peripheral Interface)的缩写,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线(1)MISO–Master Input Slave Output,主设备数据输入,从设备数据输出;(2)MOSI–Master Output Slave Input,主设备数据输出,从设备数据输入;(3)SCLK–Serial Clock,时钟信号,由主设备产生;(4)CS–Chip Select,从设备使能信号,由主设备控制。
数据输出通过SDO线,数据在时钟上升沿或下降沿时改变,在紧接着的下降沿或上升沿被读取。
完成一位数据传输,输入也使用同样原理。
因此,至少需要8次时钟信号的改变(上沿和下沿为一次),才能完成8位数据的传输。
注:说明可以配置上升沿或下降沿采样时钟信号线SCLK只能由主设备控制,从设备不能控制。
(和MDIO一样都是由STA控制,而iic是主机控制)SPI总线传输的模式:1. 采用主-从模式(Master-Slave)的控制方式SPI 规定了两个SPI 设备之间通信必须由主设备(Master) 来控制次设备(Slave). 一个Master 设备可以通过提供Clock 以及对Slave 设备进行片选(Slave Select) 来控制多个Slave 设备, SPI 协议还规定Slave 设备的Clock 由Master 设备通过SCK 管脚提供给Slave 设备, Slave 设备本身不能产生或控制Clock, 没有Clock 则Slave 设备不能正常工作.2.采用同步方式(Synchronous)传输数据CPOL:clock polarity 时钟的极性;表示SPI 在空闲时, 时钟信号是高电平还是低电平.CPHA:clock phase 时钟的相位;表示SPI 设备是在SCK 管脚上的时钟信号变为上升沿时触发数据采样, 还是在时钟信号变为下降沿时触发数据采样.Master 设备会根据将要交换的数据来产生相应的时钟脉冲(Clock Pulse), 时钟脉冲组成了时钟信号(Clock Signal) , 时钟信号通过时钟极性(CPOL) 和时钟相位(CPHA) 控制着两个SPI 设备间何时数据交换以及何时对接收到的数据进行采样, 来保证数据在两个设备之间是同步传输的.SPI总线四种工作方式SPI 模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。
spi通信原理
spi通信原理SPI通信原理。
SPI(Serial Peripheral Interface)是一种全双工的通信协议,通常用于在微控制器和外围设备之间进行数据传输。
它是一种同步串行通信协议,通过四根线进行通信,包括一个主设备和一个或多个从设备。
SPI通信协议在许多嵌入式系统中被广泛应用,因为它具有高速传输、简单的硬件连接和灵活的通信方式等优点。
SPI通信的原理非常简单,主要包括时钟信号、数据输入、数据输出和片选信号等几个关键部分。
下面我们将逐一介绍SPI通信的原理和工作方式。
首先,SPI通信协议是一种同步通信协议,它需要一个时钟信号来同步主设备和从设备之间的数据传输。
时钟信号由主设备产生,并且在数据传输的过程中始终保持稳定。
这样可以确保数据在传输过程中不会出现错误,保证通信的可靠性和稳定性。
其次,SPI通信需要同时进行数据输入和数据输出。
主设备通过数据输入线向从设备发送数据,同时从设备通过数据输出线向主设备返回数据。
这种全双工的通信方式可以实现数据的双向传输,提高了通信效率和灵活性。
另外,SPI通信中还包括片选信号。
片选信号用于选择需要进行通信的从设备,当主设备需要与某个从设备进行通信时,它会将该从设备的片选信号拉低,表示开始通信;通信结束后,片选信号会被拉高,表示通信结束。
通过片选信号,可以实现主设备与多个从设备之间的独立通信,提高了系统的可扩展性。
最后,SPI通信协议的工作方式非常灵活。
它可以通过软件和硬件来实现,主设备和从设备之间的通信速率、数据格式和传输模式等都可以根据实际需求进行配置和调整。
这使得SPI通信协议适用于各种不同的应用场景,包括存储器、传感器、显示器等多种外围设备。
总的来说,SPI通信协议是一种简单、高效、灵活的通信方式,它在许多嵌入式系统中得到广泛应用。
通过理解SPI通信的原理和工作方式,我们可以更好地设计和应用SPI接口的外围设备,提高系统的性能和可靠性。
希望本文对您理解SPI通信原理有所帮助,如果您对SPI通信协议还有其他疑问,欢迎留言讨论。
SPI总线完全解读
SPI时序详解SPI总线是Motorola公司推出的三线同步接口,同步串行3线方式进行通信:一条时钟线SCK,一条数据输入线MOSI,一条数据输出线MISO;用于CPU与各种外围器件进行全双工、同步串行通讯。
SPI 主要特点有:可以同时发出和接收串行数据;可以当作主机或从机工作;提供频率可编程时钟;发送结束中断标志;写冲突保护;总线竞争保护等。
SPI总线有四种工作方式(SP0, SP1, SP2, SP3),其中使用的最为广泛的是SPI0和SPI3方式。
SPI模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。
如果CPOL=0,串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。
时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。
如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。
SPI主模块和与之通信的外设音时钟相位和极性应该一致。
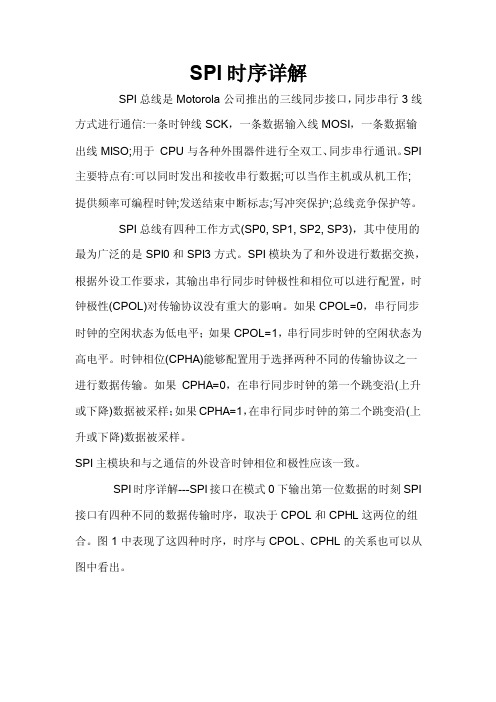
SPI时序详解---SPI接口在模式0下输出第一位数据的时刻SPI 接口有四种不同的数据传输时序,取决于CPOL和CPHL这两位的组合。
图1中表现了这四种时序,时序与CPOL、CPHL的关系也可以从图中看出。
图1CPOL是用来决定SCK时钟信号空闲时的电平,CPOL=0,空闲电平为低电平,CPOL=1时,空闲电平为高电平。
CPHA是用来决定采样时刻的,CPHA=0,在每个周期的第一个时钟沿采样,CPHA =1,在每个周期的第二个时钟沿采样。
由于我使用的器件工作在模式0这种时序(CPOL=0,CPHA=0),所以将图1简化为图2,只关注模式0的时序。
图2我们来关注SCK的第一个时钟周期,在时钟的前沿采样数据(上升沿,第一个时钟沿),在时钟的后沿输出数据(下降沿,第二个时钟沿)。
spi通信配置流程
spi通信配置流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!SPI 通信配置流程。
1. 引脚配置。
在单片机中选择用于 SPI 通信的引脚(MOSI、MISO、SCK、SS)。
SPI通信协议(SPI总线)学习
SPI通信协议(SPI 总线)学习各位读友大家好,此文档由网络收集而来,欢迎您下载,谢谢支持全双工通信通信简单数据传输速率块3、缺点没有指定的流控制,没有应答机制确认是否接收到数据,所以跟IIC总线协议比较在数据可靠性上有一定的缺陷。
4、特点1):高速、同步、全双工、非差分、总线式2):主从机通信模式5、协议通信时序详解1):SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以(单向传输时)。
也是所有基于SPI的设备共有的,它们是SDI(数据输入)、SDO(数据输出)、SCLK(时钟)、CS(片选)。
(1)SDO/MOSI –主设备数据输出,从设备数据输入;(2)SDI/MISO –主设备数据输入,从设备数据输出;(3)SCLK –时钟信号,由主设备产生;(4)CS/SS –从设备使能信号,由主设备控制。
当有多个从设备的时候,因为每个从设备上都有一个片选引脚接入到主设备机中,当我们的主设备和某个从设备通信时将需要将从设备对应的片选引脚电平拉低或者是拉高。
2):需要说明的是,我们SPI通信有4种不同的模式,不同的从设备可能在出厂是就是配置为某种模式,这是不能改变的;但我们的通信双方必须是工作在同一模式下,所以我们可以对我们的主设备的SPI模式进行配置,通过CPOL和CPHA来控制我们主设备的通信模式,具体如下:Mode0:CPOL=0,CPHA=0Mode1:CPOL=0,CPHA=1Mode2:CPOL=1,CPHA=0Mode3:CPOL=1,CPHA=1时钟极性CPOL是用来配置SCLK 的电平出于哪种状态时是空闲态或者有效态,时钟相位CPHA是用来配置数据采样是在第几个边沿:CPOL=0,表示当SCLK=0时处于空闲态,所以有效状态就是SCLK处于高电平时CPOL=1,表示当SCLK=1时处于空闲态,所以有效状态就是SCLK处于低电平时CPHA=0,表示数据采样是在第1个边沿,数据发送在第2个边沿CPHA=1,表示数据采样是在第2个边沿,数据发送在第1个边沿例如:CPOL=0,CPHA=0:此时空闲态时,SCLK处于低电平,数据采样是在第1个边沿,也就是SCLK由低电平到高电平的跳变,所以数据采样是在上升沿,数据发送是在下降沿。
UART、IIC、SPI通信协议

数据通信格式
6
2021/5/27
低
高
位
位
在
在
前
后
多字节数据传输
7
2021/5/27
注:异步通信是按字符传输的,接收设备在收到起始 信号之后只要在一个字符的传输时间内能和发送设备 保持同步就能正确接收。下一个字符起始位的到来又 使同步重新校准(依靠检测起始位来实现发送与接收 方的时钟自同步的)
UART工作原理
12
2021/5/27
IIC通信协议
• IIC总线进行数据传送时,时钟信号为高电平期 间,数据线上的数据必须保持稳定,只有在时钟 线上的信号为低电平期间,数据线上的高电平或 低电平状态才允许变化。
• 起始信号:SCL线为高电平期间,SDA线由高电平 向低电平的变化表示起始信号。
• 终止信号 :SCL线为高电平期间,SDA线由低电平 向高电平的变化表示终止信号。
下降沿(线路电位由高电位变为低电位)时说明 线路有数据传输,按照约定的波特率从低位到高 位接收数据,数据接收完毕后,接着接收并比较 奇偶校验位是否正确,如果正确则通知后续设备 准备接收数据或存入缓存。
10
2021/5/27
10位串行字符收发时序图
11
2021/5/27
IIC
• IIC为串行外设接口, IIC总线是双向、两线(SCL、 SDA)、串行、多主控(multi-master)接口标准, 具有总线仲裁机制,通常两线需要接上拉电阻, 非常适合在器件之间进行近距离、非经常性的数 据通信。
单片机中的SPI通信原理与实现
单片机中的SPI通信原理与实现SPI通信(Serial Peripheral Interface)是一种常用的串行通信协议,在单片机中广泛使用。
本文将介绍SPI通信的原理和实现方法。
一、SPI通信原理SPI通信采用主从方式,通常由一个主设备和多个从设备组成。
主设备负责控制通信的发起和结束,而从设备则被动地接收和发送数据。
SPI通信基于四根线(时钟、主输出从输入(MOSI)、主输入从输出(MISO)、片选(CS))进行数据传输。
具体步骤如下:1. 主设备通过片选信号选择对应的从设备。
2. 主设备产生时钟信号,控制数据的传输。
3. 主设备将数据通过MOSI线发送给从设备。
4. 从设备将数据通过MISO线返回给主设备。
5. 数据传输完成后,主设备通过片选信号取消对从设备的选择。
SPI通信工作在全双工模式下,即主设备和从设备可以同时发送和接收数据。
通过时钟信号的同步,确保数据的可靠传输。
二、SPI通信实现方法在单片机中实现SPI通信,需要根据具体的开发平台和编程语言来进行配置和编码。
下面以Arduino为例,介绍SPI通信的实现步骤。
1. 引入SPI库在Arduino IDE中,引入SPI库,并通过include语句告知编译器要使用SPI库函数。
2. 初始化SPI在setup函数中,使用SPI.begin()函数初始化SPI通信,并设置主设备的通信速率(默认为4MHz)和片选引脚。
3. 选择从设备在发送数据之前,通过SPI.beginTransaction()函数选择对应的从设备。
该函数需要传入配置参数,包括通信速率、MSB(Most Significant Bit,最高有效位)、SPI模式等。
4. 发送数据使用SPI.transfer()函数向从设备发送数据,并通过MOSI线传输。
该函数返回从设备传回的数据。
5. 接收数据使用SPI.transfer()函数接收从设备返回的数据,并通过MISO线传输。
单片机中的SPI通信协议详解
单片机中的SPI通信协议详解SPI(Serial Peripheral Interface)是一种同步串行通信协议,采用主从式结构,用于在嵌入式系统中实现设备之间的通信。
在单片机中,SPI通信协议被广泛应用于与外设的数据交换和设备控制。
1. SPI通信协议概述SPI通信协议由四根信号线组成,包括主设备输出(MOSI)、主设备输入(MISO)、时钟信号(SCLK)和片选信号(SS)。
其中,MOSI用于主设备向从设备传输数据,MISO用于从设备向主设备传输数据,SCLK用于同步主从设备的时钟,SS用于选择从设备。
2. SPI通信协议的传输方式SPI通信协议有两种传输模式,分别是全双工模式和半双工模式。
(1)全双工模式:主设备和从设备可以同时进行数据的发送和接收。
主设备通过MOSI将数据发送至从设备的MISO,同时从设备通过MISO将数据发送至主设备的MOSI。
这种模式下,同步时钟信号由主设备提供。
(2)半双工模式:主设备和从设备在同一时间段内只能进行数据的发送或接收。
主设备通过MOSI将数据发送至从设备的MISO,然后通过MISO将数据发送至主设备的MISO。
然后从设备向主设备发送数据的过程相同。
3. SPI通信协议的时序图SPI通信协议的时序图如下所示:```CPOL = 0 CPOL = 1------------------- -------------------| | | || Idle State | | Idle State || | | |------------------- -------------------| | | || | | |_______| |__________________| |_________Master | Slave | MasterData Send/Rec | Data Rec/Send | Data Send/Rec```其中,CPOL(Clock Polarity)和CPHA(Clock Phase)是SPI通信协议中的两个重要参数。
spi的通信原理

SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以(单向传输时)。
也是所有基于SPI的设备共有的,它们是SDI(数据输入),SDO(数据输出),SCK(时钟),CS(片选)。
(1)SDO –主设备数据输出,从设备数据输入(2)SDI –主设备数据输入,从设备数据输出(3)SCLK –时钟信号,由主设备产生(4)CS –从设备使能信号,由主设备控制其中CS是控制芯片是否被选中的,也就是说只有片选信号为预先规定的使能信号时(高电位或低电位),对此芯片的操作才有效。
这就允许在同一总线上连接多个SPI设备成为可能。
接下来就负责通讯的3根线了。
通讯是通过数据交换完成的,这里先要知道SPI是串行通讯协议,也就是说数据是一位一位的传输的。
这就是SCK时钟线存在的原因,由SCK提供时钟脉冲,SDI,SDO则基于此脉冲完成数据传输。
数据输出通过 SDO线,数据在时钟上升沿或下降沿时改变,在紧接着的下降沿或上升沿被读取。
完成一位数据传输,输入也使用同样原理。
这样,在至少8次时钟信号的改变(上沿和下沿为一次),就可以完成8位数据的传输。
要注意的是,SCK信号线只由主设备控制,从设备不能控制信号线。
同样,在一个基于SPI 的设备中,至少有一个主控设备。
这样传输的特点:这样的传输方式有一个优点,与普通的串行通讯不同,普通的串行通讯一次连续传送至少8位数据,而SPI允许数据一位一位的传送,甚至允许暂停,因为SCK时钟线由主控设备控制,当没有时钟跳变时,从设备不采集或传送数据。
也就是说,主设备通过对SCK时钟线的控制可以完成对通讯的控制。
SPI 还是一个数据交换协议:因为SPI的数据输入和输出线独立,所以允许同时完成数据的输入和输出。
不同的SPI设备的实现方式不尽相同,主要是数据改变和采集的时间不同,在时钟信号上沿或下沿采集有不同定义,具体请参考相关器件的文档。
最新STM32的SPI通信总结(含DMA)
STM32---SPI(DMA)通信的总结(库函数操作)本文主要由7项内容介绍SPI并会在最后附上测试源码供参考:1.SPI的通信协议2.SPI通信初始化(以STM32为从机,LPC1114为主机介绍)3.SPI的读写函数4.SPI的中断配置5.SPI的SMA操作6.测试源码7.易出现的问题及原因和解决方法一、SPI的通信协议SPI(Serial Peripheral Interface)是一种串行同步通讯协议,由一个主设备和一个或多个从设备组成,主设备启动一个与从设备的同步通讯,从而完成数据的交换。
SPI 接口一般由4根线组成,CS片选信号(有的单片机上也称为NSS),SCLK时钟信号线,MISO数据线(主机输入从机输出),MOSI数据线(主机输出从机输入),CS 决定了唯一的与主设备通信的从设备,如没有CS 信号,则只能存在一个从设备,主设备通过产生移位时钟信号来发起通讯。
通讯时主机的数据由MISO输入,由MOSI 输出,输入的数据在时钟的上升或下降沿被采样,输出数据在紧接着的下降或上升沿被发出(具体由SPI的时钟相位和极性的设置而决定)。
二、以STM32为例介绍SPI通信1.STM32f103 带有3个SPI模块其特性如下:2SPI 初始化初始化SPI 主要是对SPI要使用到的引脚以及SPI通信协议中时钟相位和极性进行设置,其实STM32的工程师已经帮我们做好了这些工作,调用库函数,根据自己的需要来修改其中的参量来完成自己的配置即可,主要的配置是如下几项:引脚的配置SPI1的SCLK, MISO ,MOSI分别是PA5,PA6,PA7引脚,这几个引脚的模式都配置成GPIO_Mode_AF_PP 复用推挽输出(关于GPIO的8种工作模式如不清楚请自己百度,在此不解释),如果是单主单从,CS引脚可以不配置,都设置成软件模式即可。
通信参数的设置1.SPI_Direction_2Lines_FullDuplex把SPI设置成全双工通信;2.在SPI_Mode 里设置你的模式(主机或者从机),3.SPI_DataSize是来设置数据传输的帧格式的SPI_DataSize_8b是指8位数据帧格式,也可以设置为SPI_DataSize_16b,即16位帧格式4.SPI_CPOL和SPI_CPHA是两个很重要的参数,是设置SPI通信时钟的极性和相位的,一共有四种模式在库函数中CPOL有两个值SPI_CPOL_High(=1)和SPI_CPOL_Low ( =0). CPHA有两个值SPI_CPHA_1Edge (=0) 和SPI_CPHA_2Edge(=1)CPOL表示时钟在空闲状态的极性是高电平还是低电平,而CPHA则表示数据是在什么时刻被采样的,手册中如下:我的程序中主、从机的这两位设置的相同都是设置成1,即空闲时时钟是高电平,数据在第二个时钟沿被采样,实验显示数据收发都正常。
SPI的通信速率到底可以达到多少 (2)
楼主提问:SPI的通信速率到底可以达到多少???按照手册上的说明,应该能到fosc/4,然而实际上由于SPI通信底层没有任何握手,不像I2C总线那样带ACK,所以SPI速率实际上根本不能达到fosc/4,除非发信端与收信端完全同步,然而事实上接收端往往要对接收到的数据进行一些判断和处理,所以在接收端往往会丢数,解决办法就是在发信端发完一个字节后人为加上延时等待接收端处理,但是如果这样的话,高速还有什么意义呢?我做了一个试验,即使关掉所有其它中断,只作SPI通信处理,在fosc/4的通信速率下,接收端只能接收10个字节以内的数据,10个字节以上就会丢数,而在fosc/8的通信速率下,如果关闭所有其它中断,收发256个字节是没什么问题的,但是如果应用程序有1ms的时钟中断事件的话,spi通信成功率很低。
在前面很多帖子里,看到不少人说spi只是硬件底层,通信的可靠性要靠通信协议,诚然如此,但是我以为通信协议只是最后一道保障,如果底层不可靠,通信协议再完善也是惘然。
轮询和中断方式有本质区别吗?轮询就能保证不被其它中断干扰吗?主机自己掌握SPI节奏,它只知道自己发送出去了,并不知道从机是否处理完,如果从机还在处理上一个字节,这时候发下个字节显然会丢数据啊解答者1回答:是同步!不是异步!也就是说MASTER提供时钟,所以完全由MASTER决定速率(当然大家都能达到的)再有就是这个速率仅仅指一个BYTE的通讯速率,不是整个帧速率(2个BYTE以上)从机查询和中断无关,说白了就是移位寄存器!楼主再问:关键就在于这个速率要大家都能达到啊,如果都能达到就不用讲了,实测下来就是slave 端达不到这个速率啊。
如果这个速率是一个BYTE的指标那就没啥说的了,我认了,只能在字节之间加延时了。
解答者2:我试过用fosc/2的时钟速率进行两机通讯(系统时钟16M),连续传了好多字节都没有问题。
主机用查询方式发送;从机用中断接收,接收到的数据用液晶显示出来。
SPI通信的总结

STM32---SPI通信的总结(库函数操作)本文主要由7项内容介绍SPI并会在最后附上测试源码供参考:1.SPI的通信协议2.SPI通信初始化(以STM32为从机,LPC1114为主机介绍)3.SPI的读写函数4.SPI的中断配置5.SPI的SMA操作6.测试源码7.易出现的问题及原因和解决方法一、SPI的通信协议SPI(Serial Peripheral Interface)是一种串行同步通讯协议,由一个主设备和一个或多个从设备组成,主设备启动一个与从设备的同步通讯,从而完成数据的交换。
SPI 接口一般由4根线组成,CS片选信号(有的单片机上也称为NSS),SCLK时钟信号线,MISO数据线(主机输入从机输出),MOSI数据线(主机输出从机输入),CS 决定了唯一的与主设备通信的从设备,如没有CS 信号,则只能存在一个从设备,主设备通过产生移位时钟信号来发起通讯。
通讯时主机的数据由MISO输入,由MOSI 输出,输入的数据在时钟的上升或下降沿被采样,输出数据在紧接着的下降或上升沿被发出(具体由SPI的时钟相位和极性的设置而决定)。
二、以STM32为例介绍SPI通信1.STM32f103 带有3个SPI模块其特性如下:2SPI 初始化初始化SPI 主要是对SPI要使用到的引脚以及SPI通信协议中时钟相位和极性进行设置,其实STM32的工程师已经帮我们做好了这写工作,调用库函数,根据自己的需要来修改其中的参量来完成自己的配置即可,主要的配置是如下几项:引脚的配置SPI1的SCLK, MISO ,MOSI分别是PA5,PA6,PA7引脚,这几个引脚的模式都配置成GPIO_Mode_AF_PP 复用推挽输出(关于GPIO的8种工作模式如不清楚请自己百度,在此不解释),如果是单主单从,CS引脚可以不配置,都设置成软件模式即可。
通信参数的设置1.SPI_Direction_2Lines_FullDuplex把SPI设置成全双工通信;2.在SPI_Mode 里设置你的模式(主机或者从机),3.SPI_DataSize是来设置数据传输的帧格式的SPI_DataSize_8b是指8位数据帧格式,也可以设置为SPI_DataSize_16b,即16位帧格式4.SPI_CPOL和SPI_CPHA是两个很重要的参数,是设置SPI通信时钟的极性和相位的,一共有四种模式在库函数中 CPOL有两个值SPI_CPOL_High(=1)和SPI_CPOL_Low ( =0).CPHA有两个值SPI_CPHA_1Edge (=0) 和SPI_CPHA_2Edge(=1)CPOL表示时钟在空闲状态的极性是高电平还是低电平,而CPHA则表示数据是在什么时刻被采样的,手册中如下:我的程序中主、从机的这两位设置的相同都是设置成1,即空闲时时钟是高电平,数据再第二个时钟沿被采样,实验显示数据收发都正常。
电快速瞬变脉冲群干扰对SPI通信的影响分析及应对设计

电快速瞬变脉冲群干扰对SPI通信的影响分析及应对设计李望; 魏勇; 赵贺; 王全海; 史宏光; 王淇森【期刊名称】《《电子设计工程》》【年(卷),期】2019(027)017【总页数】6页(P183-188)【关键词】电快速瞬变脉冲群干扰; SPI通信; CRC算法; 抗干扰设计【作者】李望; 魏勇; 赵贺; 王全海; 史宏光; 王淇森【作者单位】许继电气股份有限公司河南许昌461000; 国网北京市电力公司电力科学研究院北京100000【正文语种】中文【中图分类】TN972+.1SPI(serial peripheral interface)是一种高速的、全双工、同步的串行通信总线[1],以主从方式工作,接口连线简单、配置灵活、传输效率高[2],正是出于这种简单易用的特性,SPI通信广泛应用于IED设备内部数据传输通信[3]。
由于串行通信传输的不确定性以及易受干扰等原因,用于电力强电磁干扰环境下的IED设备一般要进行电快速瞬变脉冲群干扰试验,本文针对采用SPI总线作为板间通信方案的终端装置在快瞬试验过程中发现的传输错误数据的异常现象,设计了一种具有CRC校验和配置锁定功能的APP,通过该设计检测数据在传输过程中是否发生错误。
CRC是由分组线性码的分支而来[4],该算法简单易实现,能够同时检测和抗干扰,是一种高效可靠的差错校验法[5]。
该方法导致数据的冗余量增加,发送端不仅发送数据,最后还需将CRC码发送给接收端。
接收端也对接收的数据进行CRC计算,如果计算的校验码与接收到的校验码相同,则数据传输正确,反之错误。
文中首先介绍了SPI总线接口概述及装置中所使用的计量芯片中的CRC串行算法,其次对试验过程所遇到的问题及处理方法进行分析,最后描述了针对定位的干扰进行的应对设计,经试验验证,表明了该设计可有效保障数据传输的可靠性。
1 SPI总线接口SPI(Serial Peripheral Interface—串行外设接口)总线系统是一种同步串行外设接口,允许MCU与各种外围设备以串行方式进行通信、数据交换。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
if(k == 255) //等待失败
return 0;
SPI_Buf = TransData;
SPI_BufSize = TransSize;
SPI_BufTransOver = 0;
_SET_BIT(DDRB, MISO); //MISO引脚设置为输出
_CLR_BIT(DDRB, MOSI); //MOSI设置为输入
_CLR_BIT(DDRB, SCK); //SCK设置为输入
if(!_IS_MASTER)
{
SPDR = SPI_Buf[SPI_BufPtr]; //从机模式时, 接收数据后就发送数据
SPI_Buf[SPI_BufPtr] = data; //将收到的数据保存在缓冲区, 实质就是与主机交换的数据
//SPSR SPI状态寄存器
// -----------------------------------------------------------------
// | SPIF | WCOL | - | - | - | - | - | SPI2X |
BIT(SPE) | BIT(MSTR) | BIT(CPOL) | BIT(CPHA) | BIT(SPR0);// 1/16时钟频率
SPSR = 0;
_SS_LO;
_SET_BIT(DDRB, SS); //引脚设置为输出
// -----------------------------------------------------------------
// SPIF:SPI中断标志,串行发送结束后此位置位,对于查询方式,可先读SPSR,紧着
// 访问SPDR来对SPIF位清零。
_SET_BIT(SPSR, 0);
}
else if(rate < 8)
{
_CLR_BIT(SPCR, 1);
_SET_BIT(SPCR, 0);
_CLR_BIT(SPSR, 0);
}
_SET_BIT(PORTB, MISO); //使用上拉电阻
}
else
{
SPCR = //BIT(SPIE) |
BIT(SPE) | BIT(CPOL) | BIT(CPHA);
SPSR = BIT(SPI2X);
#include "spi.h"
//MISO----MISO
//MOSI----MOSI
//SCK ----SCK
// /SS ----/SS
//返回是否成功
unsigned char spi_init(unsigned char Master)
{
//SPCR SPI控制寄存器
#pragma interrupt_handler spi_STC_isr:iv_SPI_STC
void spi_STC_isr(void)
{
unsigned char data = 0, over = 0;
data = SPDR; //接收本次的数据
void SPI_SetSCKRate(unsigned char rate)
{
if(rate < 1)
{
SPCR &= ~0x03;
_SET_BIT(SPSR, 0);
}
else if(rate < 2)
// SPIE:SPI中断使能
// SPE:SPI使能
// DORD:数据次序,为1时LSB先发送
// MSTR:是否主机模式,若为主机模式,SS引脚配置为输入,但被拉低则MSTR被清零
// SPSR的SPIF位置位。用户必须重新设置MSTR位进入主机模式。
static volatile unsigned char SPI_BufTransOver = 1;
//******************************************
// SPI 中断服务程序
//******************************************
Hale Waihona Puke } //注意, 主从机的发送和接收缓冲区大小必须一致, 否则只会传输出部分数据, 即缓冲区最小的数据
unsigned char SPI_TransData(unsigned char *TransData, unsigned char TransSize)
{
unsigned char i = 0, k = 0;
else if(rate < 16)
{
_SET_BIT(SPCR, 1);
_CLR_BIT(SPCR, 0);
_SET_BIT(SPSR, 0);
}
else if(rate < 32)
{
_SET_BIT(DDRB, MOSI); //MOSI引脚设置为输出
_SET_BIT(DDRB, SCK); //SCK引脚设置为输出
_CLR_BIT(DDRB, MISO); //MISO引脚设置为输入
{
SPCR &= ~0x03;
_CLR_BIT(SPSR, 0);
}
else if(rate < 4)
{
_CLR_BIT(SPCR, 1);
_SET_BIT(SPCR, 0);
思想是, 在SPI中断程序中完成数据的发送的接收, 并且假设主机和从机的缓冲区长度是相同的. 每次中断时, 主机将数据发送给从机, 从机中断后将数据发给主机, 这样一次中断实现了主机与从机的一个字节的互换. 直到全部数据互换完成. 既然是互换, 所以只用了一个缓冲区, 它在传输前保存的是要发送的数据, 传输后保存的就是接收到的数据了. 不过在试验时有串位的情况发生, 暂未找到原因, 请高手指教.
_CLR_BIT(SPSR, 0);
}
}
static volatile unsigned char *SPI_Buf = 0;
static volatile unsigned char SPI_BufSize = 0;
static volatile unsigned char SPI_BufPtr = 0;
_SET_BIT(PORTB, SS); //使用上拉电阻
}
return 1;
}
//rate 为时钟的分频比(2,4,8,16,32,64,128)
//此函数改变 SPCR:0 SPCR:1 SPSR:0 三位
if(SPCR & BIT(SPIE)) //若已经开SPI中断则等待
for(k = 0; k < 255 && !SPI_BufTransOver; ++k)
WDR(); //等待传输出结束
}
if(over)
{
SPCR &= ~BIT(SPIE); //传输出结束后, 关SPI中断
SPI_BufPtr = 0;
SPI_BufTransOver = 1;
}
// -----------------------------------------------------------------
// | SPIE | SPE | DORD | MSTR | CPOL | CPHA | SPR1 | SPR0 |
// -----------------------------------------------------------------
_SET_BIT(SPCR, 1);
_CLR_BIT(SPCR, 0);
_CLR_BIT(SPSR, 0);
}
else
{
_SET_BIT(SPCR, 1);
_SET_BIT(SPCR, 0);
// CPOL:时钟极性,为1时表示空闲时SCK为高电平,否则为低电平。
// CPHA:时钟相位,为0时为时钟的起始沿采样数据,否则为终止沿采样数据
// SPR1,SPR0:SPI时钟速率选择:00 1/4, 01 1/16, 10 1/64, 11 1/128
SPI_BufPtr++;
if(SPI_BufPtr >= SPI_BufSize)
over = 1;
else
SPDR = SPI_Buf[SPI_BufPtr];
SPI_BufPtr++;
if(SPI_BufPtr >= SPI_BufSize)
over = 1;
}
else
{
SPI_Buf[SPI_BufPtr] = data;
_CLR_BIT(DDRB, SS); //SS设置为输入
_SET_BIT(PORTB, MOSI); //使用上拉电阻
_SET_BIT(PORTB, SCK); //使用上拉电阻
_SS_HI; //使用上拉电阻
if(!_SS_GT) //若SS引脚为低电平, 说明本机被设置为从机, 返回失败信息
return 0;
SPCR = //BIT(SPIE) |
// WCOL:写冲突标志,可通过先读SPSR,紧接着访问SPDR来清零。
// SPI2X:SPI倍速,若为主机,SCK最高频率可达CPU频率一半,从机则只能保证为1/4
if(Master)
{
_CLR_BIT(DDRB, SS); //SS引脚设置为输入, 检测SS引脚是否为高