直流电动机速度控制设计
非线性大作业—直流电动机调速系统的建模与控制系统的设计
3、PBH秩判据
线性定常系统(1)为完全能控的充分必要条件是,对矩阵A的所有特征值 均成立, ( )或等价地表示为 , 也即(SI-A)和B是左互质的。
4、PBH特征向量判据
线性定常系统(1)为完全能控的充分必要条件是A不能有与B的所有列相正交的非零左特征向量。也即对A的任一特征值,使同时满足 , 的特征向量 。
所谓最优控制,就是根据建立的系统的数学模型,选择一个容许的控制规律,在一定的条件下,使得控制系统在完成所要求的控制任务时,使某一指定的性能指标达到最优值、极小值或极大值。本文利用线性二次型最优调节器(LQR)方法对移动高架吊车进行最优控制。控制目的是使移动高架吊车能在不平衡点达到平衡,并且能够经受一定的外加干扰[8]。
能控性的直观讨论:
从状态空间的角度进行讨论:输入和输出构成系统外部变量,状态为系统内部变量。能控性主要看其状态是否可由输入影响。每一个状态变量的运动都可由输入来影响和控制,由任意的始点到达原点,为能控,反之为不完全能控。具体来说就是指外加控制作用u(t) 对受控系统的状态变量x(t)和输出变量y(t)的支配能力,它回答了u(t)能否使x(t)和y(t)作任意转移的问题。
3.1.2能控性判据
我们利用线性系统的能控性判据来判断其能控性。
设线性定常系统状态方程为:
(1)
1、格拉姆矩阵判据
线性定常系统(1)为完全能控的充分必要条件是,存在时刻,使如下定义的格拉姆(Gram)矩阵 为非奇异。
其中,该判据的证明用到了范数理论中的矩阵范数,在此不再赘述。
2、秩判据
线性定常系统(1)为完全控的充分必要条件是 ,
2 直流电动机调速系统数学模型的建立
直流电动机调压调速可控整流电源设计
直流电动机调压调速可控整流电源设计一、设计目标设计一个可控整流电源,满足直流电动机调压调速的需求。
该电源应具备以下特点:1.输出电压稳定可调;2.输出电流稳定可控;3.满足直流电动机调压调速的要求;4.设计成本低廉;5.性能可靠稳定。
二、设计原理可控整流电源的设计原理主要基于三相桥式可控整流电路。
该电路由6个可控晶闸管组成,分为正半桥和负半桥。
按照正弦交流电源的输入,晶闸管控制引脚接收控制信号,将交流电源的负半周期向直流方向进行整流。
同时,交流电源的正半周期通过极性相反的晶闸管进行整流。
通过控制晶闸管的导通时间,可以调节整流电流的大小和方向,从而实现直流电动机的调压调速需求。
三、设计步骤1.确定直流电动机的额定电压和电流,根据其负载要求确定整流电源的输出电压和电流范围。
2.选择适合的可控晶闸管,根据其额定电压和电流选择合适的型号。
3.根据整流电源输出电压和电流的范围,计算控制晶闸管的导通时间和周期。
4.根据计算结果,设计控制电路,包括控制信号发生器,控制信号的调节电路以及触发电路等。
5.确定整流电源的滤波电路,包括电感和电容等元件。
6.搭建整流电源的实验原型,进行测试和调试,验证设计的可行性。
7.根据实际测试结果进行优化和改进,完善整流电源的性能和稳定性。
四、设计实现1.整流电路:采用三相桥式可控整流电路,由6个可控晶闸管组成。
2.控制电路:采用微控制器或FPGA芯片控制,通过脉宽调制(PWM)的方式生成控制信号,控制晶闸管的导通时间和周期。
3.滤波电路:采用L-C滤波电路,电感和电容组合滤除直流电源中的脉动。
4.保护电路:设计过流保护和过压保护等电路,确保整流电源稳定可靠,避免对电动机的损坏。
5.控制算法:采用PID控制算法,通过测量电动机的转速和负载情况,调节控制信号的占空比,以实现电机的调压调速。
五、设计优化和改进1.优化控制电路:采用先进的数字控制器,改进PWM控制算法,提高整流电源的响应速度和稳定性。
直流电机速度PID控制系统设计毕业论文(设计).doc.doc
序号(学号〉: 161240303长春大学 毕业设计(论文)直流电机速度PID 控制系统设计李一丹国际教育学院自动化1612403曹福成2016 年 5 月 30 0姓 名 学 院 专 业 班 级 指导教师直流电机速度PID控制系统设计摘要:针对现有的直流电机控速难的问题,本文设计了一种基于ATmegal6L单片机的直流电机速度控制系统。
本系统以ATinegal6L单片机为主控制器,搭载了L298n为电机驱动,通过霍尔元件进行测速,通过按键控制电机的转动方向和转动速度,并配以温度传感器DS18B20对温度进行监测,通过PID算法调节PW\1 进行对速度控制。
该系统包括的模块主要有单片机为主体的控制模块、电机的驱动模块、对电机速度进行监测的模块、由LCD1602构成的显示ky r模块、电源模块和按键控制模块等。
本系统可以通过PID算法实现可编程脉宽波形对直流电机的速度进行控制,并且可以显示出当前电机的转速。
关键词:单片机;PID算法;直流电机The design of DC motor speed control system with PID Abstract: According to the existing DC motor speed control problem, this paper describes the design of a DC motor speed control system based on ATmegal6L MCU. To ATMEGA16L microcontroller as the main controller for the system, equipped with a L298n for motor drive, through the hall element of speed, through the buttons to control the motor rotation direction and the rotation speed, and the temperature sensor DS18B20 the temperature monitoring, PID algorithm is used to adjust the PWM control of the speed. The system includes the following modules display microprocessor control module, as the main body of the motor drive module, monitoring module, the speed of motor is composed of LCD1602 module, power supply module and key control module.This system can realize through PID algorithm to control the speed of the programming pulse waveforms of DC motor, and can display the current motor speed.Keywords: single chip microcomputer, PID algorithm, DC motor ky r戈ml ml ——II —In —In | * 11—I 1111 ml 1111目录Bit (1)l.i选题背景及意义 (1)1.2国内外研宄现状 (2)1.3木文主要研究的内容 (3)第2章总体方案论述 (4)ky r2.1系统主要传感器介绍 (4)2.1.1温度传感器 (4)2.1.2转速检测模块 (5)2.2系统总体功能及方案选择 (6)2.2.1系统所需模块及功能 (6)2.2.2主控制器选择 (8)第3章系统总体硬件设计 (10)3.1单片机最小系统 (10)3.1.1ATmegal6L单片机的引脚分布 (10)3.1.2最小系统的硬件电路 (13)3.2电机驱动电路 (14)3.3温度检测电路 (15)3.4光电管提示电路和按键控制电路 (15)3.5LCD1602 显示电路 (16)3.6电源电路 (17)3.7本章小节 (18)第4章系统软件设计 (19)4.1系统总体流程图 (19)4.2 PID算法简介 (19)4.2.1PID算法介绍 (20)4.2.2HD算法结果 (21)4.3系统调试步骤 (21)4.4误差分析即改进方法 (22)给论 (23)致谢 (24)参考文献 (25)隱 (26)附录I系统总体硬件电路图 (26)附录II系统中部分程序 (27)ky r In—ml ml ml ml | , I af—.第1章绪论1.1选题背景及意义电动机简称电机,俗称马达,在现实生活中,我们处处都可以见到电机的身影,小到小学生玩的电动四驱车,大到炼钢厂用的滚动罐,这些都是电机家族的成员。
基于单片机的直流电机PWM调速控制系统的设计
基于单片机的直流电机PWM调速控制系统的设计第一章:前言1.1前言:直流电机的定义:将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能(直流发电机)的旋转电机。
近年来,随着科技的进步,直流电机得到了越来越广泛的应用,直流具有优良的调速特性,调速平滑,方便,调速范围广,过载能力强,能承受频繁的冲击负载,可实现频繁的无极快速起动、制动和反转,需要满足生产过程自动化系统各种不同的特殊要求,从而对直流电机提出了较高的要求,改变电枢回路电阻调速、改变电压调速等技术已远远不能满足现代科技的要求,这是通过PWM方式控制直流电机调速的方法就应运而生。
采取传统的调速系统主要有以下的缺陷:模拟电路容易随时间飘移,会产生一些不必要的热损耗,以及对噪声敏感等。
而用PWM技术后,避免上述的缺点,实现了数字式控制模拟信号,可以大幅度减低成本和功耗。
并且PWM调速系统开关频率较高,仅靠电枢电感的滤波作用就可以获得平滑的直流电流,低速特性好;同时,开关频率高,快响应特性好,动态抗干扰能力强,可获很宽的频带;开关元件只需工作在开关状态,主电路损耗小,装置的效率高,具有节约空间、经济好等特点。
随着我国经济和文化事业的发展,在很多场合,都要求有直流电机PWM调速系统来进行调速,诸如汽车行业中的各种风扇、刮水器、喷水泵、熄火器、反视镜、宾馆中的自动门、自动门锁、自动窗帘、自动给水系统、柔巾机、导弹、火炮、人造卫星、宇宙飞船、舰艇、飞机、坦克、火箭、雷达、战车等场合。
1.2本设计任务:任务: 单片机为控制核心的直流电机PWM调速控制系统设计的主要内容以及技术参数:功能主要包括:1)直流电机的正转;2)直流电机的反转;3)直流电机的加速;4)直流电机的减速;5)直流电机的转速在数码管上显示;6)直流电机的启动;7)直流电机的停止;第二章:总体设计方案总体设计方案的硬件部分详细框图如图一所示。
示数码管显PWM单片机按键控制电机驱动基于单片机的直流电机PWM调速控制系统的设计键盘向单片机输入相应控制指令,由单片机通过P1.0与P1.1其中一口输出与转速相应的PWM脉冲,另一口输出低电平,经过信号放大、光耦传递,驱动H型桥式电动机控制电路,实现电动机转向与转速的控制。
他励直流电动机调速multisim仿真设计
任务名称:他励直流电动机调速multisim仿真设计一、引言在现代工业领域中,电动机作为一种重要的动力装置,广泛应用于各种机械设备中。
而直流电动机由于具有调速范围广、响应快等优点,被广泛应用于需要精确控制转速的场合。
为了实现直流电动机的调速控制,我们可以利用Multisim软件进行仿真设计。
本文将详细介绍他励直流电动机调速Multisim仿真设计的方法与步骤。
二、他励直流电动机调速原理他励直流电动机调速是通过改变电动机的励磁电流来实现的。
在他励直流电动机中,励磁电流的大小决定了磁场的强弱,进而影响电动机的转速。
通过控制励磁电流的大小,我们可以实现对电动机转速的精确调节。
三、Multisim软件简介Multisim是一种基于电路仿真的软件,可以模拟和分析各种电路的性能。
它提供了直观的界面和丰富的元件库,方便用户进行电路设计与仿真。
在本次任务中,我们将利用Multisim软件进行他励直流电动机调速的仿真设计。
四、他励直流电动机调速Multisim仿真设计步骤4.1 创建电路图首先,我们需要在Multisim中创建一个新的电路图。
在电路图中,我们需要添加电动机、电源和控制电路等元件。
4.2 连接电路在创建电路图后,我们需要根据他励直流电动机的调速原理,将电动机、电源和控制电路等元件进行连接。
确保电路连接正确,以确保仿真结果的准确性。
4.3 设置电动机参数在进行仿真之前,我们需要设置电动机的参数,包括电动机的额定电压、额定转速等参数。
这些参数将影响电动机的仿真结果。
4.4 添加控制电路为了实现对电动机的调速,我们需要添加一个控制电路。
控制电路可以根据输入的控制信号,调节励磁电流的大小,从而实现对电动机转速的调节。
在控制电路中,我们可以使用电阻、电容、晶体管等元件来实现。
4.5 设置调速范围为了满足不同工况下的需求,我们需要设置电动机的调速范围。
通过调整控制电路中的元件数值,我们可以实现不同转速范围的调节。
第三章直流电动机速度控制系统
机械特性与静差率
n n01
额定转速降
ΔnN
R nN I N Ce
U d1
n02
是一个恒值。 调速系统在不 同电压下的机 械特性是互相 平行的,两者 的硬度相同。
1-25
ΔnN
Ud2
0
TeN
Te
图3-4 不同转速下的机械特性
机械特性与静差率
• 调速系统在不同电压下的理想空载转速 不一样。 • 理想空载转速越低时,静差率越大。 • 同样硬度的机械特性,随着其理想空载 转速的降低,其静差率会随之增大, • 调速系统的静差率指标应以最低速时能 达到的数值为准。
1-12
n n0
Ra Ra+R1 Ra+R2 Ra+R3
0
Id
图3-1 直流电动机调阻调速时的机械特性
1-13
减弱磁通调速法
U R n T n n 0 2 e K K K (3-3) e e m
• 理想空载转速 n 0 将随 增大。 的减少而
1-14
减弱磁通调速法
1-4
第一节
直流电动机控制基础
• 直流伺服电机的分类 直流电机按其励磁方式分为永磁式、励磁式(他 励、并励、串励、复励)、混合式(励磁和永磁 合成)三种;按电枢结构分为有槽、无槽、印刷 绕组、空心杯形等;按输出量分为位置、速度、 转矩(或力)三种控制系统;按运动模式分为增 量式和连续式;按性能特点及用途不同又有不 同品种。
(3-5)
1-23
2. 静差率
• 当系统在某一转速下运行时,负载由理 想空载增加到额定值时电动机转速的变 化率,称为静差率s。
• 用百分数表示 s
nN s n0
电机速度开环控制和闭环控制
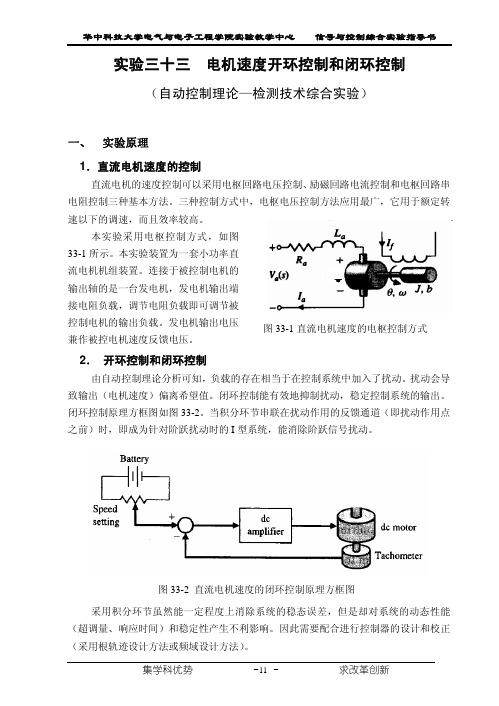
实验三十三 电机速度开环控制和闭环控制(自动控制理论—检测技术综合实验)一、 实验原理1.直流电机速度的控制直流电机的速度控制可以采用电枢回路电压控制、励磁回路电流控制和电枢回路串电阻控制三种基本方法。
三种控制方式中,电枢电压控制方法应用最广,它用于额定转速以下的调速,而且效率较高。
本实验采用电枢控制方式,如图33-1所示。
本实验装置为一套小功率直流电机机组装置。
连接于被控制电机的输出轴的是一台发电机,发电机输出端接电阻负载,调节电阻负载即可调节被控制电机的输出负载。
发电机输出电压兼作被控电机速度反馈电压。
2. 开环控制和闭环控制由自动控制理论分析可知,负载的存在相当于在控制系统中加入了扰动。
扰动会导致输出(电机速度)偏离希望值。
闭环控制能有效地抑制扰动,稳定控制系统的输出。
闭环控制原理方框图如图33-2。
当积分环节串联在扰动作用的反馈通道(即扰动作用点之前)时,即成为针对阶跃扰动时的I 型系统,能消除阶跃信号扰动。
采用积分环节虽然能一定程度上消除系统的稳态误差,但是却对系统的动态性能(超调量、响应时间)和稳定性产生不利影响。
因此需要配合进行控制器的设计和校正(采用根轨迹设计方法或频域设计方法)。
E图33-1直流电机速度的电枢控制方式图33-2 直流电机速度的闭环控制原理方框图此外,在扰动可以测量的情况下,采用顺馈控制也能有效地对扰动引起的跟踪误差进行补偿,减轻反馈系统的负担,见图33-3。
图33-3 反馈+顺馈控制方式消除扰动引起的误差式中: 为控制器传递函数,也是扰动输入时的反馈通道传递函数;)(11s G G =)(22s G G = 为被控对象(本实验中即被控直流电机)的传递函数;)(s G G c c = 为顺馈控制通道传递函数;R 为指令输入,即希望的电机速度;C 为输出被控量,即被控电机的输出速度;E 为系统的稳态误差;D 为系统的扰动输入,即电机的负载。
由扰动到输出的传递函数可知,扰动引起的稳态误差为D G G G G GE c R 212101)1(++−== (33-1) 当选择顺馈回路传递函数为 11G G c −= (33-2) 时,有00==R E ,即扰动对输出没有影响。
单片机课程设计完整版《PWM直流电动机调速控制系统》
单片机原理及应用课程设计报告设计题目:学院:专业:班级:学号:学生姓名:指导教师:年月日目录设计题目 (3)1 设计要求及主要技术指标: (4)1.1 设计要求 (4)1.2 主要技术指标 (5)2 设计过程 (6)2.1 题目分析 (9)2.2 整体构思 (10)2.3 具体实现 (12)3 元件说明及相关计算 (14)3.1 元件说明 (14)3.2 相关计算 (15)4 调试过程 (16)4.1 调试过程 (16)4.2 遇到问题及解决措施 (20)5 心得体会 (21)参考文献 (22)附录一:电路原理图 (23)附录二:程序清单 (24)设计题目:PWM直流电机调速系统本文设计的PWM直流电机调速系统,主要由51单片机、电源、H桥驱动电路、LED液晶显示器、霍尔测速电路以及独立按键组成的电子产品。
电源采用78系列芯片实现+5V、+15V对电机的调速采用PWM波方式,PWM是脉冲宽度调制,通过51单片机改变占空比实现。
通过独立按键实现对电机的启停、调速、转向的人工控制,LED实现对测量数据(速度)的显示。
电机转速利用霍尔传感器检测输出方波,通过51单片机对1秒内的方波脉冲个数进行计数,计算出电机的速度,实现了直流电机的反馈控制。
关键词:直流电机调速;定时中断;电动机;PWM波形;LED显示器;51单片机1 设计要求及主要技术指标:基于MCS-51系列单片机AT89C52,设计一个单片机控制的直流电动机PWM 调速控制装置。
1.1 设计要求(1)在系统中扩展直流电动机控制驱动电路L298,驱动直流测速电动机。
(2)使用定时器产生可控的PWM波,通过按键改变PWM占空比,控制直流电动机的转速。
(3)设计一个4个按键的键盘。
K1:“启动/停止”。
K2:“正转/反转”。
K3:“加速”。
K4:“减速”。
(4)手动控制。
在键盘上设置两个按键----直流电动机加速和直流电动机减速键。
在手动状态下,每按一次键,电动机的转速按照约定的速率改变。
直流电机调速方案设计

直流电机调速方案设计一、引言直流电机是一种常用的电机,在工业生产和日常生活中都有广泛的应用。
直流电机调速是将电机旋转的速率从低速调整到高速或从高速调整到低速的过程。
直流电机调速方案设计是在特定的应用场景下对直流电机进行调速的方案设计。
本文将介绍直流电机调速方案的设计过程和实现方法,以及在不同场景下的应用。
二、直流电机调速的原理直流电机的转速与直流电压成正比,即转速越高,直流电压也越高。
因此,为了实现直流电机的调速,可以通过控制直流电机的直流电压来达到控制直流电机转速的目的。
直流电机调速的基本原理为:通过改变电机绕组的电流和磁场的磁通量,来改变电机的输出扭矩和电机的转速。
三、直流电机调速方案的设计直流电机调速方案的设计需要根据具体的应用场景来制定。
下面将介绍一些常见的直流电机调速方案的设计方法。
1. 电阻调速这是一种基本的直流电机调速方法,通过在电动机电枢电路中串联外接电阻实现调速。
外接电阻的增加会降低电机电枢回路的电阻值,从而降低电机的旋转速度。
2. 变压器调速变压器调速是通过改变电机附近的变压器的电压来改变电机的转速。
当变压器的输出电压降低时,也会降低电机的转速。
3. 装有系数调速器的直流电机装有系数调速器的直流电机可以使用直接控制电机电压的方式来调速。
这种方法可以提供更精确的调速和较高的效率。
4. PWM调速PWM调速是通过改变电机驱动芯片的PWM脉冲宽度来改变电机的转速。
这种调速方法可以达到很高的精度,并且可以很好地控制电机的细节。
五、直流电机调速方案的应用下面将介绍几个常见的直流电机调速方案的应用场景。
1. 工业生产中的电机控制直流电机调速在工业生产中的应用非常广泛。
例如,机床设备、生产线和工程机械等都需要使用直流电机,并根据需要进行调速。
2. 机器人的动力源直流电机是机器人的常用动力源之一,直流电机调速可以精确地控制机器人的行动。
3. 电动工具的控制电动工具,例如电动钻、电动锤,需要根据需要自动调整转速以适应不同的材料和工作条件。
基于PWM控制直流电机自动调速系统设计

1 绪论1.1 课题的研究背景和意义直流电动机是最早出现的电动机,也是最早能实现调速的电动机。
长期以来,直流电动机一直占据着调速控制的统治地位。
由于它具有良好的线性调速特性,简单的控制性能,高的效率,优异的动态特性;尽管近年来不断受到其他电动机(如交流变频电机、步进电机等)的挑战,但到目前为止,它仍然是大多数调速控制电动机的优先选择。
近年来,直流电动机的结构和控制方式都发生了很大变化。
随着计算机进入控制领域以及新型的电力电子功率元件的不断出现,使采用全控型的开关功率元件进行脉宽调制 (PulseWidthModulation,简称PWM)控制方式已成为绝对主流。
这种控制方式很容易在单片机控制中实现,从而为直流电动机控制数字化提供了契机。
五十多年来,直流电气传动经历了重大的变革。
首先,实现了整流器件的更新换代,从50年代的使用己久的直流发电机一电动机组(简称G-M系统)及水银整流装置,到60年代的晶闸管电动机调速系统(简称V-M系统),使得变流技术产生了根本的变革。
再到脉宽调制 (PulsewidthModulation)变换器的产生,不仅在经济性和可靠性上有所提高,而且在技术性能上也显示了很大的优越性,使电气传动完成了一次大的飞跃。
另外,集成运算放大器和众多的电子模块的出现,不断促进了控制系统结构的变化。
随着计算机技术和通信技术的发展,数字信号处理器单片机应用于控制系统,控制电路己实现高集成化,小型化,高可靠性及低成本。
以上技术的应用,使系统的性能指标大幅度提高,应用范围不断扩大。
由于系统的调速精度高,调速范围广,所以,在对调速性能要求较高的场合,一般都采用直流电气传动。
技术迅速发展,走向成熟化、完善化、系统化、标准化,在可逆、宽调速、高精度的电气传动领域中一直居于垄断地位[1]。
目前,国内各大专院校、科研单位和厂家也都在开发直流数字调速装置。
姚勇涛等人提出直流电动机及系统的参数辨识的方法。
该方法依据系统或环节的输入输出特性,应用最小二乘法,即可获得系统或环节的内部参数,所获的参数具有较高的精度,方法简便易行。
直流电动机的三种调速方法
直流电动机的三种调速方法嘿,你知道直流电动机不?那家伙可有三种超厉害的调速方法呢!咱先说说调压调速吧。
这就好比开车时控制油门大小,通过改变电压来调节电机转速。
步骤嘛,就是用调压器啥的来改变加到电机上的电压。
那可不得注意别把电压调得太高或太低,不然电机可能就耍脾气不干啦!安全性方面呢,得确保调压器稳定可靠,别整出啥电火花吓人一跳。
稳定性也很重要呀,要是电压波动大,电机转速也跟着乱晃悠可不行。
这种方法在需要精确控制转速的场合很管用,比如一些精密加工设备。
就像雕刻大师手里的刻刀,得稳稳地控制速度才能雕出精美的作品呢!再说说调磁调速。
这就像驯马师控制马的缰绳,通过改变磁场强度来调速。
步骤就是调整励磁电流。
但可得小心别把磁场调得太弱,不然电机没力气干活啦!安全性上要注意防止磁场突然变化对周围设备的影响。
稳定性方面呢,励磁电流得稳定,不然电机转速也会忽上忽下。
这种方法在需要大范围调速的场合有优势,比如起重机啥的。
想象一下,起重机吊起重重的货物,得根据不同情况灵活调整速度,调磁调速就派上用场啦!还有串电阻调速。
这就像给跑步的人加上不同重量的沙袋,通过在电路中串入电阻来改变电机转速。
步骤就是选择合适的电阻接入电路。
可别乱串电阻,不然电机可能累趴下。
安全性要注意电阻别过热起火。
稳定性嘛,电阻得选得合适,不然转速不稳定。
这种方法在一些简单的调速场合挺好用,比如小风扇啥的。
就像夏天的小风扇,根据自己的需要调整风速,串电阻调速就能搞定。
总之,直流电动机这三种调速方法各有千秋。
根据不同的需求选择合适的方法,就能让直流电动机乖乖听话,为我们服务。
咱可得好好利用这些方法,让生活变得更美好呢!我的观点结论就是:直流电动机的三种调速方法都有其独特之处和适用场景,只要用得好,就能发挥大作用。
晶闸管直流电动机调速系统设计设计

晶闸管直流电动机调速系统设计目录1设计概述 (1)1.1 设计意义及要求 (1)1.2 方案分析 (1)1.2.1 可逆调速方案 (1)1.2.2 控制方案的选择 (2)2主电路的设计与分析 (3)2.1 整流电路 (3)2.2 斩波调速电路 (4)3控制电路的设计与分析 (5)3.1 触发电路的设计与分析 (6)3.2脉宽调制(PWM)控制的设计与分析 (6)3.2.1 欠压锁定功能 (7)3.2.2系统的故障关闭功能 (7)3.2.3软起动功能 (7)3.2.4 波形的产生及控制方式分析 (8)3.3 延时、驱动电路的设计 (8)3.4 ASR和ACR调节器设计 (9)3.4.1 ASR(速度调节器) (9)3.4.2 ACR(电流调节器) (10)结束语 (12)参考文献 (12)附录 (13)晶闸管直流电动机调速系统设计1设计概述1.1 设计意义及要求有许多生产机械要求电动机既能正转,又能反转,而且常常还需要快速地起动和制动,这就需要电力拖动系统具有四象限运行的特性,也就是说,需要可逆的调速系统。
改变电枢电压的极性,或改变励磁磁通的方向,都能够改变直流电机的旋转方向。
当电机采用电力电子装置供电时,由于电力电子器件的单向导电性,需要专用的可逆电力电子装置和自动控制系统1.2 方案分析1.2.1 可逆调速方案使电机能够四象限运行的方法有很多,可以改变直流电机电枢两端电压的方向,可以改变直流电机励磁电流的方向等等,即电枢电压反接法和电枢励磁反接法。
电枢励磁反接方法需要的晶闸管功率小,适用于被控电机容量很小的情况,励磁电路中需要串接很大的电感,调速时,电机响应速度较慢且需要设计很复杂的电路,故在设计中不采用这种方式。
电枢电压反接法可以应用在电机容量很的情况下,且控制电路相对简单电枢反接反向过程很快,在实际应用中常常采用,本设计中采用该方法。
电枢电压反接电路可以采用两组晶闸管反并联的方式,两组晶闸管分别由不同的驱动电路驱动,可以做到互不干扰。
直流电机调速方案设计
直流电机调速方案设计直流电机是将直流电能转换为机械能的电动机。
因其良好的调速性能而在电力拖动中得到广泛应用。
下面就随小编一起去阅读直流电机调速方案设计,相信能带给大家帮助。
本文以AT89S51单片机为核心,提出了基于直流电机调速与测速系统的设计方案,然后给出了系统的主电路结构,以及驱动电路设计和系统软件设计。
本方案充分利用了单片机的优点,具有频率高、响应快的特点。
直流电机是工业生产中常用的驱动设备,具有良好的起动、制动性能。
早期直流电动机的控制均以模拟电路为基础,采用运算放大器、非线性集成电路以及少量的数字电路组成。
控制系统的硬件部分复杂、功能单一,调试困难。
本方案采用单片机控制系统,使得许多控制功能及算法可以采用软件技术来完成,为直流电动机的控制提供了更大的灵活性,并使系统能达到更高的性能。
P W M简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种技术,广泛应用在测量、功率控制与变换等许多领域中。
脉宽调制是一种模拟控制方式,其根据相应载荷的变化来调制晶体管基极的偏置,改变晶体管导通时间。
是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。
PWM可以应用在许多方面,如电机调速、温度控制、压力控制等。
在PWM驱动控制的调整系统中,按一个固定的频率来接通和断开电源,并根据需要改变一个周期内“接通”和“断开”时间的长短。
通过改变直流电机电枢上电压的“占空比”来改变平均电压的大小,从而控制电动机的转速。
因此,PWM又被称为“开关驱动装置”.PWM的占空比决定输出到直流电机的平均电压。
所以通过调节占空比,可以实现调节输出电压无级连续调节。
整个系统由输入电路、PWM调制、测速电路、驱动电路、控制部分及显示等部分组成,PWM调制选用AT89S51单片机通过软件实现频率和占空比的调节。
直流电机调速的设计方案驱动电路用光耦隔离保护电路,控制部分由单片机和外围电路组成,实现各种控制要求,外围电路主要完成对输入信号的采集、操作、对速度进行控制,显示部分采用四位共阳数码管。
基于51单片机的直流电机PWM调速控制系统设计

基于51单片机的直流电机PWM调速控制系统设计I摘要本文主要研究了利用MCS-51系列单片机控制PWM信号从而实现对直流电机转速进行控制的方法。
本文中采用了三极管组成了PWM信号的驱动系统,并且对PWM信号的原理、产生方法以及如何通过软件编程对PWM信号占空比进行调节,从而控制其输入信号波形等均作了详细的阐述。
另外,本系统中使用了霍尔元件对直流电机的转速进行测量,经过处理后,将测量值送到液晶显示出来。
关键词:PWM信号,霍尔元件,液晶显示,直流电动机II目录目录 (III)1 引言 (1)1.1 课题背景 (1)1.1.2 开发背景 (1)1.1.3 选题意义 (2)1.2 研究方法及调速原理 (2)1.2.1 直流调速系统实现方式 (4)1.2.2 控制程序的设计 (5)2 系统硬件电路的设计 (6)2.1 系统总体设计框图及单片机系统的设计 (6)2.2 STC89C51单片机简介 (6)2.2.1 STC89C51单片机的组成 (6)2.2.2 CPU及部分部件的作用和功能 (6)2.2.3 STC89C51单片机引脚图 (7)2.2.4 STC89C51引脚功能 (7)3 PWM信号发生电路设计 (10)3.1 PWM的基本原理 (10)3.2 系统的硬件电路设计与分析 (10)3.3 H桥的驱动电路设计方案 (11)5 主电路设计 (13)5.1 单片机最小系统 (13)5.2 液晶电路 (13)5.2.1 LCD 1602功能介绍 (14)5.2.2 LCD 1602性能参数 (15)5.2.3 LCD 1602与单片机连接 (17)5.2.4 LCD 1602的显示与控制命令 (18)5.3 按键电路 (19)5.4 霍尔元件电路 (20)III5.4.1 A3144霍尔开关的工作原理及应用说明 (21)5.4.2 霍尔传感器测量原理 (22)6 系统功能调试 (23)总结 (24)致谢 (25)参考文献 (26)IV1 引言1.1 课题背景1.1.2 开发背景在现代电子产品中,自动控制系统,电子仪器设备、家用电器、电子玩具等等方面,直流电机都得到了广泛的应用。
直流电机调速控制系统设计
成绩电气控制与PLC课程设计说明书直流电机调速控制系统设计.Translate DC motor speed Control system design学生王杰学号学院班级信电工程学院13自动化专业名称电气工程及其自动化指导教师肖理庆2016年6月14日目录1 ××11.1 ××××××11.1.1 ××××错误!未定义书签。
1.1.2 ××××1……1.2 ××××××11.2.1 ××××8……2 ×××××82.1 ××××××102.1.1 ××××10……3 ×××××123.1 ××××××123.1.1 ××××12……参考文献13附录14附录114附录2141 直流电机调速控制系统模型1.1 直流调速系统的主导调速方法根据直流电动机的基础知识可知,直流电动机的电枢电压的平衡方程为:R I E U a +=式(1.1)公式中:U 为电枢电压;E 为电枢电动势;R I a 为电枢电流与电阻乘积。
由于电枢反电势为电路感应电动势,故:n C E φe =式(1.2)式中:e C 为电动势常数;φ为磁通势;n 为转速。
由此得到转速特性方程如下:φe a C R I U /)(n -=式(1.3)由式(1.3)可以看出,调节直流电动机的转速有以下三种方法:1.改变电枢回路的电阻R ——电枢回路串电阻调速。
直流电机调速控制和测速系统设计
直流电机调速控制和测速系统设计摘要:直流型的电机得性能在电机结构中有着较好的优势,由于时代的持续进步,与直流电机相关的使用频率也变得更高。
然而,以往的直流电机工作性质与所面临得运转问题息息相关,怎样对转速进行合理管控就变成了直流电机发展和应用期间存在的困难。
而直流电机控制系统的产生,可以较好的处理该方面的情况,不仅能够增强直流电机的平稳程度和精准程度,还可以合理管控直流电机的运行速度,从而达到我国对相关设备的应用标准。
基于此,本文重点分析了直流电机调速控制的方式,进一步对测速系统进行设计,以供相关人员参考。
关键词:直流电机;调速控制;测速系统目前,直流发电机的应用非常广泛,在自动化装备领域中,其内蓄电池内部都配置有相应的直流发电机,保证在断电的情况下起到一定的发电机组的润滑作用。
而直流电动机在启动时,其所用的电流量会增大很多,造成一定的冲击力,这种冲击力会造成一定的影响,比如充电器出现损坏、短路等,这些故障的产生都会使得发电设备无法正常运转。
因此,为了解决我国在有关这方面的控制技术上存在的问题,需要对调速与测速系统进行控制与设计,以此来确保整个电机设备的稳定性与安全性。
1电机调速原理及其实现电机调速原理主要是指对电机两端所存在的电压进行数据上的更改,以此来完成对电机转速的调节工作,对于电机而言,当自身的电压方向出现改变,那么电机的旋转变化发生改变。
而PWM在调速原理方面则是以脉冲信号为主,利用脉冲信号的输出特性来进行传输,并改变原本存在于电机内部空间的脉冲信号,通过间接或速度按钮来完成有关电机电压的更改工作,从而来确保电机的转速能够因此发生改变。
在这一过程中,电机内部的脉冲占比越大,转速也就越慢。
整个电路主要是以H桥为主,为了确保整个驱动电机能够得到有效控制,将三极管进行单片机的引脚安装,将基极部分分别安装,从而来确保当电机处于运行状态时,能够利用垫片机来对其自身的转速内容进行控制。
当脉冲信号输送工作时,另一端会通过开展低电平的模式来进行应用,这时的直流电机会呈现为正转状态,反之亦然。
直流电动机速度控制设计.

第一章:概述直流电动机是人类发明最早和应用的一种电机。
与交流电机相比,直流电机因结构复、维护苦难,价格昂贵等缺点制约了它的发展,应用不及交流电机广泛。
但由于直流电动机具有优良的启动、调速和制动性能,因此在工业领域中仍占有一席之地。
转速调节的主要技术指标是:调速范围D和负载变化时对转速的影响即静差率,以及调速时的允许负载性质等(静差率就是表示在负载变化时拖动装置转速降落的程度。
静差率越小,表示转速稳定性越好,对生产机械,如机床加工的零件,其加工的精度及表面光洁度就越高)。
而直流电动机的突出优点是恰好是能在很大的范围内具有平滑,平稳的调速性能,过载能力较强,热动和制动转矩较大。
因此,从可靠性来看,直流电动机仍有一定的优势。
调节直流电动机转速的方法有三种:(1)电枢回路串电阻;(2)改变励磁电流;(3)改变电枢回路的电源电压;而本文从另一个角度来阐述直流电机的速度控制,即利用自动控制中的反馈来调节电机的平稳运行以达到各项性能指标。
第二章:系统数学模型本系统的简化方框图为:其对应的原理图为:控制系统的被控对象为电动机(带负载),系统的输出量是转速w ,参数亮是Ui 。
控制系统由给定电位器、运算放大器1(含比较作用)、运算放大器2(含RC 校正网络)、功率放大器、测速发电机、减速器等部分组成。
工作原理为:当负载角速度ω和电动机角速度m ω一致的时候,反馈电压为0,电机处于平衡状态即电动机运行稳定。
当负载的角速度收到干扰的作用时,ω和m ω失谐,控制系统通过反馈电压的作用来改变m ω直到达到新的一致使系统恢复稳定,电机稳定运行。
2.1直流电动机的数学模型:直流电动机的数学模型。
直流电动机可以在较宽的速度范围和负载范围内得到连续和准确地控制,因此在控制工程中应用非常广泛。
直流电动机产生的力矩与磁通和电枢电流成正比,通过改变电枢电流或改变激磁电流都可以对电流电机的力矩和转速进行控制。
图2.2是一个电枢控制式直流电动机的原理图。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一章:概述
直流电动机是人类发明最早和应用的一种电机。
与交流电机相比,直流电机因结构复、维护苦难,价格昂贵等缺点制约了它的发展,应用不及交流电机广泛。
但由于直流电动机具有优良的启动、调速和制动性能,因此在工业领域中仍占有一席之地。
转速调节的主要技术指标是:调速范围D和负载变化时对转速的影响即静差率,以及调速时的允许负载性质等(静差率就是表示在负载变化时拖动装置转速降落的程度。
静差率越小,表示转速稳定性越好,对生产机械,如机床加工的零件,其加工的精度及表面光洁度就越高)。
而直流电动机的突出优点是恰好是能在很大的范围内具有平滑,平稳的调速性能,过载能力较强,热动和制动转矩较大。
因此,从可靠性来看,直流电动机仍有一定的优势。
调节直流电动机转速的方法有三种:
(1)电枢回路串电阻;
(2)改变励磁电流;
(3)改变电枢回路的电源电压;
而本文从另一个角度来阐述直流电机的速度控制,即利用自动控制中的反馈来调节电机的平稳运行以达到各项性能指标。
第二章:系统数学模型
本系统的简化方框图为:
其对应的原理图为:
控制系统的被控对象为电动机(带负载),系统的输出量是转速w ,参数亮是Ui 。
控制系统由给定电位器、运算放大器1(含比较作用)、运算放大器2(含RC 校正网络)、功率放大器、测速发电机、减速器等部分组成。
工作原理为:当负载角速度ω和电动机角速度m ω一致的时候,反馈电压为0,电机处
于平衡状态即电动机运行稳定。
当负载的角速度收到干扰的作用时,ω和m ω失谐,控制系统通过反馈电压的作用来改变
m ω直到达到新的一致使系统恢复稳定,电机稳定运行。
2.1直流电动机的数学模型:
直流电动机的数学模型。
直流电动机可以在较宽的速度范围和负载范围内得到连续和准确地控制,因此在控制工程中应用非常广泛。
直流电动机产生的力矩与磁通和电枢电流成正比,通过改变电枢电流或改变激磁电流都可以对电流电机的力矩和转速进行控制。
图2.2是一个电枢控制式直流电动机的原理图。
在这种控制方式中,激磁电流恒定,控制电压加在电枢上,这是一种普遍采用的控制方式。
设为输入的控制电压
电枢电流
为电机产生的主动力矩
为电机轴的角速度
为电机的电感
为电枢导数的电阻
为电枢转动中产生的反电势
为电机和负载的转动惯量
根据电路的克希霍夫定理
(2-1)
电机的主动转矩
(2-2)
其中为电机的力矩常数。
反电势
(2-3)
式中为电机反电势比例系数
力矩平衡方程
(2-4)
消去中间变量,,后得到
(2-5)
整理后
(2-6)
式中:称为直流电动机的电气时间常数;称为直流电动机的机电时间常数;
,为比例系数。
直流电动机电枢绕组的电感比较小,一般情况下可以忽略不计,式(2-6)可简化为
(2-7)
图2.1 直流电动机
忽略Mr扰动后,则直流电动机微分方程为
经拉斯变后得:
1
1
)(+=
S T K G m s
所以直流电动机就等效为以个惯性环节,即:
2.2测速发电机数学模型
测速发电机的输出电压i u 和转速ω成正比,即有
i u = K t ω
式中K t 是测速发电机比例系数,经拉斯变换为一比例环节:
2.3功率放大器数学模型
常用的直流功率放大器有集成功率放大器、PWM 功率放大器、晶闸管功率放大器三种。
其中PWM 是一个电压脉冲变换装置,其PWM 波形信号经功率放大输出以驱动直流电机,实现调速控制。
在采用PWM 控制的系统中,由于开关频率远大于电机频率,靠电枢的滤波作用,脉冲交流并不会对直流电机造成影像。
PWM 还有独特的“动力润滑作用”使电机的低速平滑换向性好。
当使用PWM 功放时候,它可以等效为一个惯性环节,即:
2.4系统传递函数
两个比例放大器均可等效为比例环节,因此此控制系统经等效后结构框图为:
由此可得此系统的闭环传递函数为
()1
321323321)(++++=
m m m m
s K K K K S T T S T T K K K K G
经忽略和简化后可得
K
S TS K
G s ++=
2
)( 其中m m T T T T T +=
33 , 3
321T T K
K K K K m m +=
第三章:系统性能分析
经过对一般电机和控制系统的研究取K=2,T=0.6s. 系统的单位阶跃响应表达式及动态性能指标及。
结论
通过本次设计,对直流电动机和反馈控制有了更深的了解和掌握。
本此设计的重点之一就是抽象数学模型,求出传递函数,求出系统的传递函数以后,关于系统各种性能的分析就相对简单一些,但是系统的各项指标是判断系统控制好坏的重要标准,因此性能分析不能小视!通过对系统性能的分析以后,根据对系统性能的要求,在原系统的基础之上进行校正。
通过各种分析和适当的校正,系统满足了对其提出的要求,就能平稳的工作,很好地执行电机的各种功能。
设计体会
在本次的设计中,感受最深的就是理论和实际的区别,本以为自控学的还可以,设计就不会太难,但是设计开始之后,就感到了知识的肤浅,要想做一个好设计必须对知识有深刻的理解和准确的把握。
虽然完成了课程设计,但我认为存在许多不足。
我觉得在以后的学习中应注意理论和实际的联系。
在以后的学习中要做到:
1.认真阅读与钻研参考资料。
2.系统学习和重点深入相结合。
在全面系统学习教材的基础上,对重点知识点进行深入的学习,掌握重要原理和概念,以便更好地把握本课程的全部内。
3. 重视理论联系实际,提高分析问题、解决问题的能力。
4. 保证必要的学习时间。
根据本课程特点和自身的实际情况,合理设计内容和自学
时间。
参考文献
[1]胡寿松.自动控制原理. 科学出版社2001 2
[2]易继锴,现代控制系统设计,北京工业大学出版社1992 3
[3]李友善.自动控制原理. 国防工业出版社2003
[4]刘修文.实用电子电路图解中国电力出版社2006。