汽车CAN总线系统简介论文
汽车控制系统中的CAN总线通信技术研究

汽车控制系统中的CAN总线通信技术研究随着汽车的智能化和数字化程度不断提高,汽车控制系统变得越来越复杂。
为了实现各种功能的协调与交互,车内需要大量地进行信息交换和处理,并且保证信息的安全和可靠性。
CAN总线作为一种高速、可靠、安全的现代汽车网络通信技术,已经成为了汽车控制系统中最常用的通信协议。
本文将对CAN总线技术在汽车控制系统中的应用及相关研究进行阐述和分析。
一、CAN总线的概述1.1 CAN总线的发展历程CAN(Controller Area Network)是由德国Bosch公司于1983年首次提出的一种汽车网络通信协议。
早期的汽车控制系统中,各种控制单元间之间的通信采用的都是点对点的串行通信方式,虽然能够实现数据的传输,但是其速度慢、可靠性差、开销大等问题日益凸显。
为了避免这种情况,Bosch公司提出了CAN总线协议,该协议在速度、可靠性、安全性等方面都具有极大的优势,很快被广泛应用在汽车控制系统中。
1.2 CAN总线的特点和优势CAN总线是一种串行通信协议,其特点是可靠性高、速度快、结构简单、成本低、可扩展性好、安全性高等。
其在汽车控制系统中的应用主要有以下几个方面:(1)传输速率高。
CAN总线的传输速率可达到1Mbps,高速率的传输可以满足车载设备复杂控制需求,同时传输距离又可以达到了数百米,能够满足车辆广大控制系统的需求。
(2)支持多设备的连接。
CAN总线是一种多主机共享总线协议,每一台设备都可以主导总线,所有设备在总线上共享通信。
(3)实现分布式控制。
CAN总线允许多个设备通过总线进行分布式控制,可以让控制和处理集中和分散起来,这样做可以有效地降低了整个系统的复杂度,也可以提高了控制系统的可靠性和安全性。
(4)高可靠性。
CAN总线是一种高可靠性的协议,它借助CRC校验、错误帧处理、重传机制等技术,保证数据传输的正确性和完整性。
在汽车控制系统中,这种高可靠性尤为重要,可以保障驾驶者的安全。
学士论文毕业设计论文can总线技术在汽车上的应用
毕业论文(设计)评定成绩:题目CAN总线技术在汽车上的应用副标题性质:毕业论文学生姓名年级系别专业指导教师目录1.CAN总线技术及在汽车上的应用 (3)2.CAN总线技术的特点及优点 (4)2.1、CAN总线技术的特点 (4)2.2、CAN总线技术的优点 (5)3.汽车上的CAN总线 (6)4.车用CAN未来发展趋势 (6)5.CAN总线控制系统的检修 (8)5.1 CAN总线故障形式 (9)5.2 CAN总线系统中终端电阻的检修 (9)5.3 用故障诊断仪器检修CAN系统 (9)6. CAN总线的维修 (9)7.结论 (9)8.谢辞 (10)9. 参考文献 (10)CAN总线技术在汽车上的应用摘要:介绍了CAN总线技术在汽车上的应用,以及CAN总线出现的故障及检测和维修方法。
关键词:CAN总线;总线故障;检测;维修就像汽车电子技术在20世纪70年代引入集成电路、80年代引入微处理器一样,现在数据CAN总线技术的引入也将是汽车电子技术发展的一个里程碑。
随着电子、程控技术、集成电路及单片机在汽车上的应用,汽车的大多数部件控制由传统的机械控制逐步转变为现在的电子、程控控制,如电控燃油喷射发动机、自动变速器、电子转向和防盗系统等的控制。
技术的进步,控制精度的提高,这就使得汽车上的控制单元数目增加,控制单元数目增加后导致线束增多、电路复杂、质量大、成本高、故障多、维修困难,为了减少线束、减少成本、优化结构,必须采用一种线束少、信息传输快、可控性强的信息传递系统。
因而,一种新型的信息传递技术CAN总线技术产生了。
1、CAN技术及在汽车上的应用CAN全称为“Controller Area Ne twork”,即控制器局域网。
CAN是国际上应用最广泛的现场总线之一。
它将各个单一的控制单元以某种形式(多为星形)连接起来,形成一个完整的系统。
在该系统中,各控制单元都以相同的规则进行数据传输交换和共享,称为数据传输协议。
关于汽车CAN总线概述及其故障诊断检测方法的论文

论文汽车CAN总线概述及其故障诊断检测方法班级:11汽车电子技术(1)班姓名:..学号:…指导教师:..日期:2013年7月6日摘要随着汽车技术的快速发展,汽车性能不断提高,汽车电器与电子控制装置在汽车上的应用越来越多,传统的汽车线路难以满足汽车技术发展。
为了简化线路,提高信息传输的速度和可靠性,降低故障频率,车载网络技术应运而生。
一辆汽车不管有多少个电控单元,每个电控单元都只需引出两条线共同接在两个节点上,这两条导线就称作数据总线,并且由于硬件控制器元件供应商不断降低成本的努力及提供大量产品来发展关于CAN的系统,而一增长趋势在未来十年仍将持续。
本文介绍了CAN总线技术及会出现的故障问题和解决方法。
关键词:车载网络技术,故障和解决方法目录摘要 (2)汽车CAN总线技术简介 (4)汽车CAN总线技术工作原理 (5)汽车CAN总线技术的优缺点 (5)汽车CAN总线技术的应用及功能......................................6-7汽车CAN总线技术的故障和解决方法...............................7-8参考文献. (9)1汽车CAN总线技术简介CAN总线技术是ISO国际标准化的串行通信协议。
在汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。
由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。
为适应“减少线束的数量”、“通过多个LAN,进行大量数据的高速通信”的需要,1986 年德国电气商博世公司开发出面向汽车的CAN 通信协议。
此后,CAN 通过ISO11898 及ISO11519 进行了标准化,在欧洲已是汽车网络的标准协议。
汽车CAN总线技术通过遍布车身的传感器,汽车的各种行驶数据会被发送到“总线”上,这些数据不会指定唯一的接收者,凡是需要这些数据的接收端都可以从“总线”上读取需要的信息。
CAN数据总线在迈腾轿车中应用论文

CAN数据总线在迈腾轿车中应⽤论⽂
浅谈CAN数据总线在迈腾轿车中的应⽤【摘要】本篇论⽂针对can数据总线在迈腾轿车上的⼀些⽤应、can数据总线⼀些基本特点和汽车can数据总线的发展趋势等进⾏了较为深⼊的研究。
【关键词】can;数据总线;通信;迈腾
⼀汽⼤众⽣产的中⾼级轿车迈腾为德国⼤众集团b级车平台——pq46平台上诞⽣的最新⼀代b级轿车,⼜称为passat b6,为上海⼤众passat b5轿车的新⼀代产品。
迈腾轿车应⽤了⼤量的先进技术,尤其多路can总线系统的应⽤,提⾼了车辆的动⼒性、舒适性、安全性。
can 是controller area network 的缩写,是德国bosch公司为解决现代汽车中众多的控制单元及传感器之间的数据交换⽽开
发的⼀种串⾏数据通信协议。
它是⼀种多主总线通信介质可以是双绞线同轴电缆或光导纤维,通信速率可达1mbps,距离可达10km。
在⼤众集团旗下轿车中can总线最⼤多为500kbit/s。
考虑到信号的重复率及产⽣出的数据量,各个公司在汽车上应⽤多路can总线。
can数据总线将各个控制单元组合成⼀个整体,使所有信息都沿总线传输,与所连接的控制单元数及所涉及的信息量的⼤⼩⽆关,这样就解决了随着新增信息量的加⼤,线路及控制单元上插头的数⽬不断增加的问题,并且使不同信息需要不同线路的问题也得以解决。
由于采⽤了许多新技术及独特的设计,can总线与⼀般的总线相⽐,具有突出的可靠性、实时性和灵活性。
所以新型轿车普遍应。
CAN总线与车辆网络控制系统
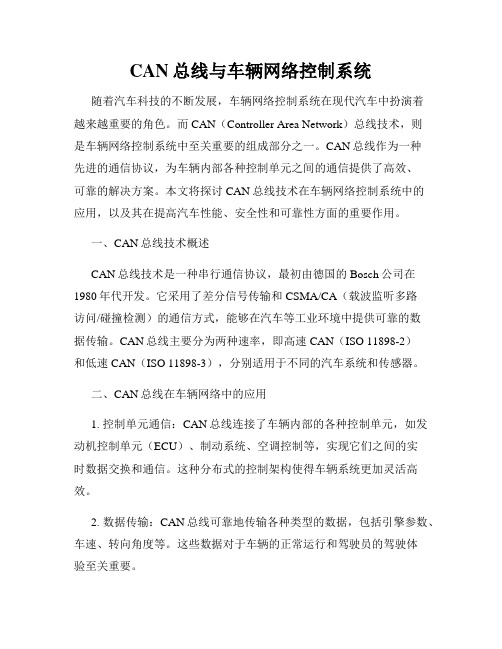
CAN总线与车辆网络控制系统随着汽车科技的不断发展,车辆网络控制系统在现代汽车中扮演着越来越重要的角色。
而CAN(Controller Area Network)总线技术,则是车辆网络控制系统中至关重要的组成部分之一。
CAN总线作为一种先进的通信协议,为车辆内部各种控制单元之间的通信提供了高效、可靠的解决方案。
本文将探讨CAN总线技术在车辆网络控制系统中的应用,以及其在提高汽车性能、安全性和可靠性方面的重要作用。
一、CAN总线技术概述CAN总线技术是一种串行通信协议,最初由德国的Bosch公司在1980年代开发。
它采用了差分信号传输和CSMA/CA(载波监听多路访问/碰撞检测)的通信方式,能够在汽车等工业环境中提供可靠的数据传输。
CAN总线主要分为两种速率,即高速CAN(ISO 11898-2)和低速CAN(ISO 11898-3),分别适用于不同的汽车系统和传感器。
二、CAN总线在车辆网络中的应用1. 控制单元通信:CAN总线连接了车辆内部的各种控制单元,如发动机控制单元(ECU)、制动系统、空调控制等,实现它们之间的实时数据交换和通信。
这种分布式的控制架构使得车辆系统更加灵活高效。
2. 数据传输:CAN总线可靠地传输各种类型的数据,包括引擎参数、车速、转向角度等。
这些数据对于车辆的正常运行和驾驶员的驾驶体验至关重要。
3. 网络管理:CAN总线具有自动检测和纠正错误的能力,能够在通信过程中实时监测数据的完整性和准确性,提高了系统的可靠性和稳定性。
三、CAN总线在提升汽车性能和安全性方面的作用1. 实时性能:CAN总线的高速通信能力确保了车辆各个系统之间的实时数据传输,从而提高了车辆的响应速度和性能。
2. 故障诊断:CAN总线可以通过故障码诊断系统快速检测和定位车辆故障,提高了维修效率和成本效益。
3. 安全性:CAN总线具有高度的数据完整性和稳定性,能够有效防止数据的篡改和恶意攻击,保障了车辆系统的安全性。
汽车电子系统中的CAN总线技术研究
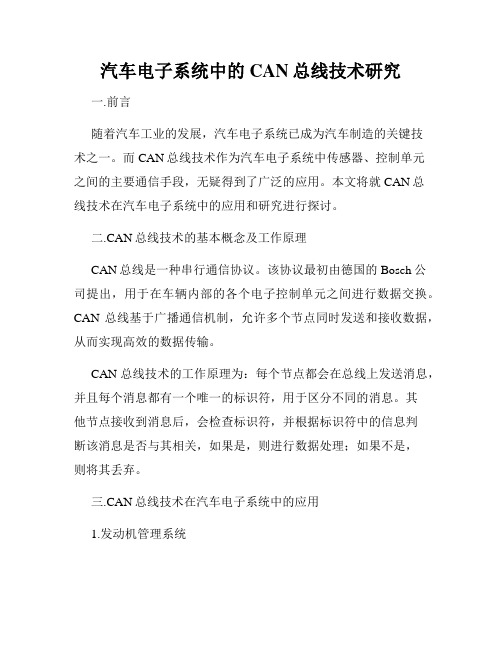
汽车电子系统中的CAN总线技术研究一.前言随着汽车工业的发展,汽车电子系统已成为汽车制造的关键技术之一。
而CAN总线技术作为汽车电子系统中传感器、控制单元之间的主要通信手段,无疑得到了广泛的应用。
本文将就CAN总线技术在汽车电子系统中的应用和研究进行探讨。
二.CAN总线技术的基本概念及工作原理CAN总线是一种串行通信协议。
该协议最初由德国的Bosch公司提出,用于在车辆内部的各个电子控制单元之间进行数据交换。
CAN总线基于广播通信机制,允许多个节点同时发送和接收数据,从而实现高效的数据传输。
CAN总线技术的工作原理为:每个节点都会在总线上发送消息,并且每个消息都有一个唯一的标识符,用于区分不同的消息。
其他节点接收到消息后,会检查标识符,并根据标识符中的信息判断该消息是否与其相关,如果是,则进行数据处理;如果不是,则将其丢弃。
三.CAN总线技术在汽车电子系统中的应用1.发动机管理系统汽车电子系统从发动机管理系统开始,而CAN总线技术在发动机管理系统中的应用也是最为广泛的。
发动机控制单元会通过CAN总线接收来自传感器和执行器的反馈,并根据这些信息调整发动机的工作状态,以达到提高燃油效率、降低排放等目的。
2.车身控制系统车身控制系统包括车门、车窗等部件的控制,也包括座椅调整等配件的控制。
CAN总线技术可以将不同的控制节点连接在同一总线上,从而使得这些节点之间可以互相通信,实现更高的车身控制精度。
3.底盘控制系统底盘控制系统包括ABS防抱死制动系统、ESP电子稳定控制系统等。
CAN总线技术可以将不同的底盘控制单元连接在同一总线上,以实现数据共享和协调。
例如,当ESP系统检测到车辆出现打滑现象时,它会向ABS系统发送信息,要求它尽快制动,从而使车辆得到更好的控制。
四.CAN总线技术的发展和挑战随着汽车电子系统的发展,越来越多的电控单元需要连接到CAN总线上,同时需要传输更大的数据量,这对CAN总线技术提出了更高的要求。
CAN总线汽车仪表论文

CAN总线的汽车仪表探究【摘要】汽车在我国已经成为我国居民生活中越来越普遍的生活交通工具,人们对于汽车性能的要求也逐渐提高。
由于汽车总线技术的不断发展创新,总线型汽车仪表取代传统汽车仪表已经是汽车仪表发展的必然趋势。
以下我们就对can总线汽车仪表进行简单分析。
【关键词】汽车仪表;can总线;汽车电子0.前言can总线汽车仪表通过实际使用证明该类汽车仪表的稳定性和可靠性以及精准度均要超过传统汽车仪表。
can总线型汽车仪表具有使用功能强大集成度高,产品成本适中等特点。
本文主要针对汽车仪表展开进一步的探索。
1.简述汽车电子由于现代社会对于汽车性能等方面的要求的逐渐提高,为了更好满足这些需求,我们采用电子控制技术,通过对汽车的一些使用性能如汽车尾气排放、汽车节能、安全及汽车舒适性的不断提高的同时也提高了汽车电子的控制程度。
汽车电子产品大体上可分为两类:一类是汽车电子的控制装置,主要包括汽车动力总成控制与、汽车底盘和车身的电子控制、汽车的舒适系统和汽车防盗系统;第二类就是车载汽车的电子装置,主要有汽车信息系统、汽车的导航系统、车载视听娱乐系统、车载网络以及汽车通信系统等。
2.汽车电子的现状近几年来,欧美推出的车型大多配有一个两个或两个以上的网络系统,该系统不仅应用于高档车中,部分低档的经济型车也拥有该系统。
例如神龙汽车推出的“毕加索”、“萨拉”n7轿车就分别安装了一个和两个网络系统,一汽大众的“宝来”与上海大众的“波罗”也分别装备了can网。
伴随着电子技术的不断发展,汽车电子仪表也得到了快速的发展。
发达国家已经将全数字式汽车仪表普遍应用于汽车中,而我国虽然对全数字式汽车仪表非常看好,但我国还未具备该技术的开发条件。
全数字式的汽车仪表将会是现今以及未来一段时间内汽车仪表显示装置的主导技术。
3.简单介绍cancan是近年来在汽车行业中广泛应用的一种数据和控制通讯网络,是韧性较强的一种电器规范与协议,can具有极高的可靠性与容错能力,所以can是应用于轿车或卡车中,用以应对危险与无法预测的恶劣环境中。
车辆CAN总线概述(完整版)
一.CAN总线简介1. CAN总线的发展历史20世纪80年代初期,欧洲汽车工业的蓬勃发展,车辆电子信息化程度的也不断提高。
当时,由于消费者对于汽车功能的要求越来越多,而这些功能的实现大多是基于电子操作的,这就使得电子装置之间的通讯越来越复杂,同时意味着需要更多的连接信号线,但是传统的线束式汽车电子系统已经不能满足车辆电子信息功能发展的需求。
为了解决这一制约现代汽车电子信息化发展的瓶颈,德国Bosch公司设计了一个单一的网络总线,所有的外围器件可以被挂接在该总线上,经过试验,这一总线能够有效解决现代汽车中庞大的电子控制装置之间的通讯,并且能够减少不断增加的信号线。
所以在1986年Bosch公司正式公布了这一总线,且命名为CAN总线。
CAN控制器局部网(CAN—Controller Area Network)属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的串行通讯网络,它具有很高的网络安全性、通信可靠性和实时性,简单实用,网络成本低,特别适用于汽车计算机控制系统和环境恶劣、电磁辐射强和振动大的工业环境,因此CAN总线在诸多现场总线中独占鳌头,成为汽车总线的代名词,CAN总线开始进入快速发展时期:1987年Intel公司生产出了首枚CAN控制器(82526)。
不久,Philips公司也推出了CAN 控制器82C200;1991年,Bosch颁布CAN 2.0技术规范,CAN2.0包括A和B两个部分为促进CAN以及CAN协议的发展,1992在欧洲成立了国际用户和厂商协会(CAN in Automation,简称CiA),在德国Erlangen注册,CiA总部位于Erlangen。
CiA提供服务包括:发布CAN的各类技术规范,免费下载CAN文献资料,提供CANopen规范DeviceNet规范;发布CAN产品数据库,CANopen产品指南;提供CANopen验证工具执行CANopen认证测试;开发CAN规范并发布为CiA 标准。
汽车专业论文 CAN总线构成与常见故障分析 (1)
CAN总线模块就是特定的数据采集、显示、控制单元。数据交换--信号电平和位表示:静态时是2.5V,用CAN_H高(3.5V)比CAN_L低(1.5V)表示的逻辑0被称为显形位,而用CAN_L(3.5V)比CAN_H(1.5V)表示的逻辑1叫做隐性位。CAN总线数据分为模拟量和数字量,模拟量是由相应的传感器测量得到,并将得到的信号经过处理,再通过A/D设备转换成数字信号,最后由处理器MCU将数据处理成CAN报文并发送到总线上。模拟量最终的值显示在指针表阵列中。如车速、转速、水温、气压等。
故障排除:车辆拖入地沟检查故障,发现车下串接前控模块和中控模块的胎压模块1、2防水插头部位严重氧化、腐蚀导致线路断路,经过线束维修该故障排除。惯性思维推测,串接中控模块和后顶控模块的胎压模块3插头也在车下,极有可能存在故障隐患,经检查发现插头也有氧化、腐蚀现象,维修线束后故障隐患排除。
(二)、布局要求
故障现象:串联CAN总线系统车型某车报修内容--全车供电不正常。
故障检查:接通电源开关和钥匙开关, CAN总线系统不工作,全车无供电,使用万用表测量前控模块用电输入电压24V和向各模块输出唤醒24V正常,CAN-H、CAN-L之间60Ω电阻值不正常,仪表模块120Ω正常,后控模块120Ω没有,检测串接中控模块两端60Ω电阻值,后控模块正常,仪表模块没有。工作原理分析:串接的胎压模块1、2连接故障。
一、CAN总线构成
(一)、硬件
CAN总线是由传输媒体与一系列电控模块(ECU)构成。传输媒体为屏蔽双绞线,其中两条绞线被称为CAN-H(高)和CAN-L(低)负责连接各模块通讯,外部屏蔽线抵抗信号干扰,必须单点搭铁,屏蔽线接车身地,其它各个电控单元屏蔽地接口悬空。SAE J1939协议规定,为减小信号干扰,主CAN线长度不超过40米,支CAN线长度不超过1.5米。
汽车CAN总线—毕业论文设计

摘要汽车CAN 总线是20世纪80年代以来发展起来的多主机串行数据通信协议网络,它解决了复杂传统布线方式与提升汽车性能的矛盾,如今CAN总线已比较广泛的应用与车在网络并发挥出强大的“中枢神经”的作用,但是中国在该技术上起步晚,因此国内对于CAN总线相对陌生,本文系统介绍车用CAN总线技术的产生发展,从微观和宏观应用介入介绍汽车CAN总线的应用原理及在国内市场的使用状况,并预测该技术的发展趋势及对今后中国汽车服务业的挑战。
使汽车行业从业人员和消费者对该技术有不同程度的了解,从而提高一定程度上提高国人的汽车文化素养,迎接汽车数字化时代的到来。
关键词:CAN总线,帧,协议,应用AbstractVehicle CAN-Bus is a kind of serial date agreement developed since 1980th .It solved the contradiction between complex traditional arrangement of wire way and promoting of high property. At present CAN-Bus is already relatively widely used in board network and plays the role of CNS. But Chinese enterprises starts late .Thus Chinese people feel strange for it. This text tells the produce and development of vehicle CAN-Bus and predicts challenges this technology will give for Chinese vehicle service industry in order to give a different degrees comprehension for consumers and relative worker in vehicle industry. Countrymen will promote their vehicle know-how quality in a certain degree and welcome the coming of digital time of vehicle.Key Words:Can-bus,Frame,Agreement,Application目录前言 (1)1 汽车CAN总线的产生与发展 (2)1.1CAN总线简介 (2)1.2CAN总线的产生 (2)1.3车用CAN总线标准化历程 (3)1.4汽车CAN总线应用分类 (3)1.4.1驱动系统子网 (4)1.4.2信息∕娱乐子网 (4)1.4.3 安全∕舒适子网 (4)1.4.4故障诊断子网 (4)2 CAN协议体系结构和功能 (5)2.1 CAN协议分层 (5)2.2数据链路层和物理层功能简介 (6)2.2.1接收滤波 (6)2.2.2 超载通知 (6)2.2.3 恢复管理 (6)2.2.4数据封装和拆装 (7)2.2.5帧编码 (7)2.2.6物理信令(PLS) (7)2.2.7物理介质附件子层(PMA) (7)3汽车CAN总线系统硬件构成及其工作原理 (8)3.1传感器 (8)3.2控制单元 (8)3.3控制器 (9)3.4收发器 (10)3.5汽车网络传输介质 (11)3.5.1双绞线 (11)3.5.2同轴电缆 (11)3.5.3光纤 (12)3.6网关 (13)3.7数据线终端电阻 (14)4.汽车CAN总线工作过程 (15)4.1多路传输原理 (15)4.2位数值表示与通信距离 (15)4.3 多帧信息的拆装与重组 (16)4.4汽车CAN总线消息帧分类 (17)4.4.1数据帧 (17)4.4.2远程帧 (18)4.4.3出错帧 (18)4.4.4过载帧 (19)4.4.5帧间空间 (19)4.5CAN总线的错误类型和界定 (20)4.6非破坏性按位仲裁规则 (21)4.7 CAN总线系统的网络管理 (21)4.8例析CAN总线具体工作过程 (22)5汽车CAN技术应用升级方向 (25)5.2 D2B Optical 光纤 (25)5.3OSEK开放式标准化系统 (25)5.4COMMAND网络 (26)6车用CAN总线在国内车市的应用趋势调查及影响 (27)结论 (29)致谢 (30)参考文献 (31)前言目前国内车市越来越类似于手机市场,车系繁多且性能多样,而具备相同性能的汽车在过去的价格要贵得多。
汽车can总线工作原理和特点
汽车can总线工作原理和特点全文共四篇示例,供您参考第一篇示例:在现代汽车中,CAN(Controller Area Network)总线作为一种重要的通信系统,已经被广泛应用于汽车的各个领域。
CAN总线的出现不仅极大地提高了汽车的智能化水平,也进一步提升了汽车的安全性能和可靠性。
那么,CAN总线的工作原理和特点又是什么呢?1. 工作原理CAN总线是一种串行通信协议,它的工作原理基于一种叫做“CSMA/CR”(Carrier Sense Multiple Access with Collision Resolution)的控制方式。
在这种控制方式下,所有的节点都可以随时发送信息,当多个节点同时发送信息时,系统会自动进行冲突检测和冲突解决,以确保数据传输的可靠性。
CAN总线的传输介质采用双绞线,其特点是抗干扰能力强、传输距离远、传输速度快。
CAN总线中每个节点都有独立的地址和标识符,节点之间可以通过标识符来进行识别和通信。
这种结构可以实现多节点之间的并行通信,大大提高了通信效率。
2. 特点CAN总线具有高可靠性。
采用冲突检测和冲突解决的方式能够有效避免数据错误和丢失,保证了数据传输的稳定性,大大降低了系统崩溃的风险。
CAN总线具有良好的实时性。
由于CAN总线采用了先进的通信协议和传输介质,因此其传输速度快、响应时间短,非常适合汽车上对实时性要求较高的系统,比如发动机控制、刹车系统等。
CAN总线还具有良好的扩展性和灵活性。
汽车的功能模块非常多样化,CAN总线系统可以根据不同的需求进行扩展和升级,而且可以支持多种不同类型的传感器和执行器的接入,非常适合汽车这样的复杂系统。
CAN总线还具有低功耗的特点。
由于CAN总线的通信协议设计非常精巧,能够最大程度地减少能耗,这对于汽车这种对能源效率要求较高的应用场景非常重要。
CAN总线作为一种先进的汽车通信系统,具有高可靠性、实时性、扩展性、灵活性和低功耗等诸多特点,已经成为车载电子系统中不可或缺的一部分。
基于CAN总线技术的汽车控制系统研究
基于CAN总线技术的汽车控制系统研究汽车控制系统是汽车技术领域的重要组成部分,而CAN总线技术是现代汽车控制系统的重要支撑。
CAN总线技术的应用,使汽车控制系统得到了极大的改进,提高了系统的智能度、稳定性和安全性。
一、CAN总线技术的基本概念CAN总线技术是一种现代化的车辆网络技术,它是Controller Area Network的缩写,意为“控制器局域网络”。
CAN总线技术将传感器、控制器、执行器等元器件通过总线连接,实现实时通讯和数据交换,使得汽车控制系统中的各种信息可以更加智能化地进行传递。
基于CAN总线技术的汽车控制系统之所以具有诸多优势,主要表现在以下方面:1.高速数据传输:CAN总线技术通过串行通信方式,实现高速数据传输,降低了数据传输时延,提高了系统的实时性。
2.巨大信息容量:CAN总线技术可以支持多达8个字节的信息传输,而且可以在同一总线上传输多种类型的信息,包括控制命令、状态信息、数据信息等。
3.高度的可靠性:CAN总线技术采用了差分传输和冗余机制,实现了高度的可靠性和抗干扰性,使得控制系统中的数据传输更为安全可靠。
二、基于CAN总线技术的汽车控制系统的应用1.发动机控制系统基于CAN总线技术的发动机控制系统主要负责发动机的监控、调节和故障诊断等工作。
系统通过传感器获取发动机参数信息,包括转速、负载状态、油压等,并将其传递给控制器进行处理。
系统通过控制器控制发动机喷油、点火等操作实现发动机的稳定运行。
2.制动系统控制基于CAN总线技术的制动系统控制主要由减速控制和牵引力控制两部分组成。
减速控制通过获取车辆速度和制动踏板信号,来控制车辆的减速和停车。
牵引力控制则是通过控制车轮滑行的程度来保证车辆的牵引性。
3.动态稳定控制系统动态稳定控制系统是一种新型的主动安全控制系统,主要通过控制车辆的制动和抓地力分配,有效地改善了弯道行驶过程中的行车稳定性,提高了行车安全性。
4.底盘控制系统底盘控制系统主要用于控制车辆的悬挂,包括悬挂硬度调节、车身姿态控制以及路面状况评估等。
CAN总线论文-1
《CAN总线》论文题目: CAN总线技术及应用院(系):专业:学生姓名:学号:时间:成绩评语CAN总线技术及其应用摘要:CAN是ISO国际标准化的串行通信协议。
CAN总线技术是当今比较实用的现场总线技术。
因具备独特的设计、较高的可靠性及特性,适合工业过程监控设备的互连。
本文分析了CAN总线的技术特点及应用趋势,对CAN 总线在汽车领域的应用进行了深入的探讨。
关键字:CAN总线;报文传输;汽车电子;智能系统1 引言在当前的汽车产业中,出于对安全性、舒适性、方便、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。
由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。
为适应“减少线束的数量”、“通过多个LAN,进行大量数据的高速通信”的需要,1986年德国电气商博世公司开发出面向汽车的CAN通信协议。
此后,CAN 通过ISO11898及ISO11519进行了标准化,现在在欧洲已是汽车网络的标准协议。
CAN属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的串行通信网络。
较之目前许多RS-485基于R线构建的分布式控制系统而言,基于CAN总线的分布式控制系统具有明显的优越性。
1986年德国最大的工业企业之一Rober Bosch公司首次提出了应用于汽车内各种传感器和执行器之间相互通信的CAN 总线(Controller Area Network)技术以来,以其可靠性、实时性和灵活性强的特点,得到了诸多汽车开发商的青睐。
本文介绍了CAN总线的技术特点及应用趋势,对CAN总线在汽车领域的应用进行了深入的探讨。
2 CAN总线的特点及应用趋势2.1 CAN总线的特点CAN总线是德国BOSCH公司从80年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议,它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维。
简介汽车CAN-BUS总线控制系统

岳 丽
科
赢
简介汽车 C N B S总线控制系统 A —U
( 甘肃交通职业技 术学院 , 肃 兰州 7 0 7 ) 甘 3 0 0
摘 要 : 合 实际 , 对 汽 车 C — US总 线控 制 系统 进 行 了论 述 。 结 针 AN B 关 键 词 : 车 ;AN B S总 线控 制 系统 : 构 汽 C —U 结 现 代 中 高 级 轿 车 上 采 用 了 十 几 个 甚 至 二 DV 十几个电控单元,而每一个 电控单元都需要 与 相关的多种传感器和执行器发 生通讯,并且 各 种 电控单元 间也需要进行信息交换 。如果 每项 数 信息都要 通过各 自独立 的数据线进 行传递, 则 整个 电控 系统需要大量 的线和接件 ,增加 了系 统 的诊 断 难 度 和 车重 量 ,同 时 也 增 加 了 成 本 。 德 国 B S h公 司 开 发 出 了 应 用 于 汽 车 上 的 OC SV C N数据总线系统,利用两条数 据传输线实现 A 图 1 AN数 据 总 线 的 组 成 C 图 2 C N数 据 传 输 线 ( 绞 线 ) A 双 各 电控单元间的信息传递。迄今为止,大众 、 奔 驰 、 马 、 用 、 志 和 菲 亚 特 等 汽 车 公 司 都 相 宝 通 凌 控倒单元 l 控 制 革 妇 控 锄单 元 3 控倒 单 蠢珥 继 采 用 了 该 系 统 ,我 国 的 宝来 、奥 迪 和 帕 萨 特 等车型也 已使用该 系统 。 接 散 { l 受 据 ^, 挺 I n } / 数譬 人 / l / I 受 I1 接 1C N数据总线的组 成与结构 A 椅敷 l 矗蛔 l } l l 蠢 据 l I 童 据 l l 捡数 n 检敦 I l C (ot lrAraNe ok即控 制器 局 ANC nr l e t r) oe w 接收 敷搬 l 震 撅 I l 数据 i I 收 舔 l / 、 / 避救 / 接收 V / 接 数 U l l 域 网, 总线 由 1个控制器 、 个 收发器 、 数 该 1 2个 据传输终端和 2条数据传输线组成,如图 1 。 11C N控 制 器 和 C N 收 发 器 . A A ・ 每一个 电控单元 中均 设有一个 C AN控制 一 ~ 器 和一 个 C N收 发 器 。 C N控 制 器 主 要 用 来 A A 、、厂 接收微处理 器传来 的信息,对这些信 息进行处 理并传给 C N收发器, A 同时 , A C N控 制器也接 收由C AN收 发器传 来的数 据,对这些 数据 进 行处理,并传给 电控单元 中的微 处理器 。C AN 敷 据 传 媛 收发器用 接收 C N控制器 送来 的数据并将 其 A 图 3 数 据 的具 体 传 输 过 程 发 送 到 C N 数 据 传 输 线 上 ,同时 接 收 C N 数 A A 据传 输线 上 的数 据 并将 其 送 给 C AN控 制 器 。 系统 中标识符是唯一 的,不可能有两个 站发 C N具有 十分优 越 的特点 : A 低成 本 、 极高 1 A 数 据 传输 终 端 .C N 2 送具有相 同标识符 的报 文。当几个 站同时竞争 的总线利用率 、很远的数据传输距离 ( 长达 l O 在 C AN数据传 输线的数据 发送和接收 两 总线读取 时, 这种配置 十分重要 。 AN总线的报 k 、 C m)高速 的数据 传输速率 ( 高达 1Mbt )可根 is、 / 端,都接有 电阻器, 用于 防止数据在数据传输 线 文发送 和接收参见 图 3 。当一个 站要 向其 它站 据报文 的 I D决定接收或屏蔽该报文 、 可靠的错 终端 被反 射并以 回声的形式返 回,从而保证 了 发送数 据时, 该站 的 C U将要发送 的数据 和 自 误处理和检错机制 、发送的信息遭到破坏后可 P 数据 的正确传送 。 己的标识符传 送给本站 的 C N芯片, A 并处 于准 自动重发 、节点在错误严重的情况下具有 自动 1 . 据 传 输 线 3数 备状态 ;当它 收到总线分配 时,转 为发送报 文 退出总线的功能 、报文不包含源地址或 目标地 数据 传输线 是用 以传输 数据 的双 向数据 状态。C N芯 片将数据根据协议组织 成一定 的 址 、仅用标志符来指示功能信息以及优先级信 A 线 。汽车上 C N数据传输线 大都是双绞线 , A 这 报文格式发 出, 时网上的其它站处 于接收状 息等 。C M / D是 “ 这 S AC 载波侦听多路访 问 , 冲突 (ar rSne Mu il ceswt C l i h — 两条信号 线,被称 为“ AN H” C — ,和“C N— ” 态 。每个处于接收状态 的站对接收到 的报文进 检测 ”C re es hpe A cs i o A L, 这种结构使系统能够同时读写。为了防止数据 行检测, 判断这些报 文是否是发 给 自己的, 以确 li D tc 的缩写 。 io e t sn e ) 利用 C MA访问总线 。 S 可对 传送时的干扰,两条 数据传输线缠绕在 一起如 定是否接受它。 总线上信号进行检测 ,只有 当总线处 于空闲状 图 2 同时这两条线的 电位相反,如果一根数据 。 3 车载网络系统通信 态时 , 才允 许发送 。利用 这种方法 , 可以允许 多 C AN总线规 范 己被 IO制定 为 国际标 准 个节 点挂接 到同一 网络上 。当检测 到一个 冲突 S 线上的电压大约为 O,那么另一根 线上的电压 v 就 大 约 为 5 。这 样 ,两 根 线 的总 电 压保 持 一 个 IO1 88,是 国际上应用最广 泛的现场总线之 位 时 , v S 9 1 所有 节点重新 回到监 听总线状态 , 到该 直 最初 , A C N被 设计作 为汽车环境 中的微控 冲突时间过后 , 开始发送 。 才 在总线超载的情况 常数,而且所产生 的电磁效 应也会 由于极 性相 反而互 相 抵消 ,使 向外 辐 射时 保持 中性 无 辐 制 器 通 讯 ,在 车 载 电子 控 制 装 置 、 C E U之 间 交 下,这种技术可能会造成发送信号经过许多延 换信息 , 形成 汽车 电子控 制网络。 比如 : 发动机 迟 。为 了避 免 发 送 延 时 , 利 用 C MA C 可 S /D方 式 射。 2C AN数 据 总线 的 数 据 传 输 管 理系统 、 速箱控制器 、 变 仪表装备 、 电子 主干 访 问总线 。当总线上有两个节点 同时进行发送 均嵌人 C N控制装置 。 A 数据 总线 的数据传输像一个 电话会议 。一 系统 中, 时,必须通过无损 的逐位仲裁方法来使有最高 个 电话用户电控单元将数据 “讲 人” 网络 中, C N通讯 协议 主要 描述 设备 之 间的信 息 优先权 的的报文优先发送 。 C N总线上发送 A 在 A C N总线层 的定 义与开放系统互连 的每一条报文都具有唯一 的一个 l 位或 2 1 9位 其他用户通过 网络 “接 收” 。当 C AN总线 上的 传递方式 。 A 0I 一致 。每一层 与另一设备上 相同的那 数字 的 I 。 A D C N总线状态取 决于二进制数 0 而 个节 点( 发送数据 时, 站) 它以报文形式广播 给 模型(s) 网络 中所有节点 。 每个节点来说, 对 无论数据是 层通讯 。实际 的通讯发生在每一设备上相邻 不是 1 所 以 I , D号越 小 , 则该 报文拥 有越 高的 否是发给 自己的, 都对其进行接收 。 每组报文开 的两层 ,而设备只通过模型物理层的物理介质 优先权 。因此一个为全 0标志符 的报文具有总 头 的 1 位字符 为标识符 ,而扩展格式 C 1 AN的 互 连 。 C N 总 线 规 范 定 义 了模 型 的 最 下 面 两 线上的最高级优先权 。 A 标志符长度可 达 2 9位。定义 了报文 的优 先级, 层 :数据链路层和物理层。应用层协议可 以由 这 种 报 文 格 式 称 为 面 向内 容 的 编 址 方 案 。在 同 C AN用户定义成适合工业领域 的任何方案 。 责 任编 辑 : 明月 胡
汽车技术毕业论文CAN总线在汽车上的应用
汽车技术毕业论⽂CAN总线在汽车上的应⽤XX⼯业⾼等专科学校继续教育学院毕业论⽂(设计)中⽂题⽬:CAN总线在汽车上的应⽤英⽂题⽬:CAN bus and its application in automobile毕业专业:汽车机械制造技术学⽣姓名: XX准考证号:指导教师:⼆零⼀⼆年⼆⽉独创性声明本⼈声明所呈交的论⽂是本⼈在导师指导下进⾏的研究⼯作和取得的研究成果,除了⽂中特别加以标注和致谢之处外,论⽂中不包含其他⼈已经发表或撰写过的研究成果,也不包含为获得XX⼯业⾼等专科学校或其他教育机构的学位或证书⽽使⽤过的材料。
与我⼀同⼯作的同志对本研究所做的任何贡献均已在论⽂中作了明确的说明并表⽰了谢意。
论⽂作者签名:签字⽇期:年⽉⽇学位论⽂版权使⽤授权书本论⽂作者完全了解XX⼯业⾼等专科学校有关保留、使⽤论⽂的规定。
特授权XX⼯业⾼等专科学校可以将论⽂的全部或部分内容编⼊有关数据库进⾏检索,并采⽤影印、缩印或扫描等复制⼿段保存、汇编以供查阅和借阅。
(保密的论⽂在解密后适⽤本授权说明)论⽂作者签名:导师签名:签字⽇期:年⽉⽇签字⽇期:年⽉⽇中⽂摘要随着汽车的发展,汽车正向⾼舒适.⾼操控性.⾼安全性.⾼智能⽅向发展。
尤其是⾼档轿车,⾼精度传感器及汽车电器在整车⼤量应⽤,增加了⼤量复杂的线束,⼤量的线束给整车的安全性能带来巨⼤隐患。
在这种情况下,产⽣了⼀种全新的信号传递⽅式“总线”既BUS。
总线技术最先应⽤于⼯控领域。
现场总线技术⾃70年代诞⽣⾄今,由于它在减少系统线缆,简化系统安装、维护和管理,降低系统的投资和运⾏成本,增强系统性能等⽅⾯的优越性,引起⼈们的⼴泛注意,得到⼤范围的推⼴,导致了⾃动控制领域的⼀场⾰命。
本⽂介绍了汽车电器中最常⽤的总线——CAN总线的产⽣及发展历史,并对其优点及主要技术指标进⾏了详述,就其在汽车上的具体应⽤给出了实例,最后分析了CAN总线的发展趋势。
关键词:控制器局部⽹、通信、CAN总线的功能A b s t r a c tWith the development of automobile, auto forward high comfort, high maneuverability, high security and intelligent direction. Especially the high-end cars, high-precision sensors and automotive appliances in the vehicle a large number of applications, adds a number of complex wiring harness, a large number of wiring harness to the vehicle's safety performance of a huge hidden dangers. It was first used in industrial field bus technology. Field bus technology since the birth of 70 years so far, because of its reduced system, cable, simplifying installation, maintenance and management, and lower system investment and operating costs, increase system performance, the advantages of causing widespread attention, get big range of promotion, led to a revolution in the field of automatic control. This article describes the most common vehicle electrical bus - CAN bus generation and development of history and its advantages and the main technical indicators of the detail on its specific application in the car example is given, the last of the CAN Bus trends.Keywords: controller area network, communications, CAN bus functions⽬录⽬录第1章 CAN总线的产⽣与发展 (1)1.1 CAN BUS 基础 (1)1.2 CAN BUS 系统构成 (2)1.3 CAN BUS 特点 (3)1.4 CAN BUS 技术介绍 (4)1.4.1 位仲裁 (4)1.4.2 CAN与其它通信⽅案的⽐较 (4)1.4.3 CAN的报⽂格式 (5)1.4.4 数据错误检测 (5)第2章利⽤CAN总线完成对汽车电⼦控制系统节点的在线编程 (7)2.1 CAN BUS是系统在线编程应⽤和代码升级重要⼯具 (7)2.2 系统分析与设计 (7)2.2.1 系统整体设计分析 (7)2.2.2 PC机控制层软件的设计 (7)2.2.3 ECU节点软件的分析 (8)2.3 ECU节点的软件设计 (8)2.4 利⽤CAN总线对汽车电⼦控制系统节点的在线编程的优点 (9)第3章 CAN BUS 的发展趋势 (10)3.1 现场总线的发展不会被计算机通信技术取代 (10)3.1.1 功能⽅⾯ (10)3.1.2 要求⽅⾯ (11)3.1.3 结构⽅⾯ (12)3.2 现场总线应⽤⼯程的发展趋势 (12)3.2.1 通过应⽤技术发挥现场总线的优势 (12)3.2.2 不同类型的现场总线组合更有利于降低成本 (13)3.2.3 现场总线的本质是信息处理现场化 (13)3.2.4 ⽹络的设计 (13)3.2.5 系统组态傻⽠化 (13)第4章结束语 (14)参考⽂献 (15)致谢 (16)第1章 CAN总线的产⽣与发展控制器局部⽹(CAN-CONTROLLER AREA NETWORK)是BOSCH公司为现代汽车应⽤领先推出的⼀种多主机局部⽹,由于其卓越性能现已⼴泛应⽤于⼯业⾃动化、多种控制设备、交通⼯具、医疗仪器以及建筑、环境控制等众多部门。
CAN总线在汽车计算机控制系统中的应用

CAN总线在汽车计算机控制系统中的应用【摘要】CAN总线技术在汽车行业中扮演着至关重要的角色。
本文从基本原理入手,介绍了CAN总线在汽车控制系统中的应用。
在汽车发动机控制方面,CAN总线实现了各个传感器和执行器之间的高效通讯,提高了发动机性能和燃油效率。
在底盘控制中,CAN总线可以实现车辆稳定性控制和制动系统的协调工作。
在安全系统方面,CAN总线通过快速传输信息,提高了车辆的安全性。
而在信息娱乐系统中,CAN总线使得各个娱乐设备之间实现互联互通。
CAN总线技术的应用不仅提升了汽车控制系统的可靠性和智能化水平,也为汽车工业的发展带来了新的机遇和前景。
在未来,随着技术的不断进步,CAN总线有望在汽车行业中扮演更加关键的角色。
【关键词】CAN总线, 汽车计算机控制系统, 基本原理, 发动机控制, 底盘控制, 安全系统, 信息娱乐系统, 技术重要性, 控制系统提升, 发展前景.1. 引言1.1 CAN总线在汽车计算机控制系统中的应用在发动机控制方面,CAN总线可以实现各个传感器和执行器之间的数据交换,使发动机控制更加精确和高效。
通过CAN总线,发动机控制单元可以实时监测发动机工况,并根据需要对燃油喷射、点火时机等参数进行调整,以提高燃油效率和降低排放。
在底盘控制方面,CAN总线可以实现车辆动态稳定控制、制动系统协调、悬挂系统调节等功能。
通过CAN总线,各个底盘控制单元可以实时传输数据,协同工作,使车辆在各种路况下保持稳定性和安全性。
在安全系统方面,CAN总线可以实现防抱死制动系统(ABS)、电子稳定系统(ESP)、车身控制系统等功能。
这些系统可以通过CAN 总线实时交换数据,快速做出反应,避免事故发生。
在信息娱乐系统方面,CAN总线可以实现音频、视频、导航等功能的集成。
通过CAN总线,各个娱乐设备可以实现数据共享,并与车辆其他系统进行交互,提供更加智能的驾驶体验。
CAN总线技术在汽车行业中发挥着重要作用,为汽车控制系统的提升和发展提供了重要支持。
汽车电子系统中的CAN总线技术研究
汽车电子系统中的CAN总线技术研究I. 汽车电子系统的发展与CAN总线技术的出现随着现代科技的不断发展,汽车制造业也获得了巨大的推进。
在此背景下,汽车电子系统逐步成为了汽车的重要组成部分。
而CAN总线技术的出现,则更加完美地解决了汽车电子系统的通信问题。
II. CAN总线技术的基本原理和特点CAN(控制器局域网)总线技术,是一种用于实时应用通信的汽车总线标准。
它能够让多个ECU(电子控制单元)之间进行相互通信,并且实现对汽车电路的实时控制。
它的基本原理在于,使用CAN总线将多个设备相互连接起来,将数据进行传送和处理。
其特点包括高速、高可靠性、低成本等。
III. CAN总线技术在汽车电子系统中的应用现在的汽车电子系统主要有发动机控制系统、制动系统、车身控制系统、音响系统以及空调系统。
它们之间的通信,主要依靠CAN总线技术。
在汽车电子控制领域中,CAN总线技术在数据通信、数据存储、数据控制等方面具有着重要的应用价值。
比如,在发动机控制系统中,通过CAN总线技术将数据传输至ECU,并能实现对发动机的实时调节;制动系统中,可以通过CAN总线实现制动分配的控制作用;空调系统中,CAN总线技术可以实现液压和电力控制的配合。
IV. CAN总线技术的优劣分析尽管CAN总线技术在汽车电子系统中有很多应用,但是它仍然存在一些缺陷。
如安全性不够,可能易受到黑客攻击;可扩展性较差,不同型号的车型进行联网会存在一定问题;数据传输的速度有限,不适用于某些高速或低速数据传输需求。
然而,这些缺陷并不足以改变CAN总线技术作为汽车电子系统重要通信标准的地位。
V. CAN总线技术在未来发展的趋势未来的汽车电子控制系统将会在更多方面应用到CAN总线技术:从现有的软件中隐藏更多的硬件控制逻辑,使得未来的汽车控制系统在不断发展变化中更加灵活和适应快速发展的科技。
同时,未来的系统将具有更高的安全性,更广泛的可扩展性和更高速的数据通信能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
论文汽车CAN总线系统简介摘要CAN(Controller Area Network)即控制器局域网,是德国Bosch公司20世纪80年代最初动机是为了解决现代汽车中庞大的电子控制装置之间的通讯,减少不断增加的信号线而应用开发的一种通信协议。
因其良好的性能价格比和可靠性,如今已得到广泛应用。
传输速率为83.3~500kbit/s。
LIN总线:是车内最新且运用最广泛的低成本串行通讯系统。
开发这种是为了产生一种开放的标准“低成本”CAN,用在CAN难于实现或使用成本过高的位置。
使用LIN后,无需增加CAN的带宽和灵活性,即可实现与智能传感器和执行器之间的通信。
通信协议和数据格式均基于单主/多从概念。
LIN总线在物理上基于单线制12V总线。
通过LIN启动的典型部件包括车门模块(电动车窗、车门锁、后视镜调节),滑动天窗,转向盘上的控制按钮(收音机、电话……),座椅控制器,风挡玻璃雨刮器,照明,雨水/光线传感器,起动机,发电机等等。
LIN 总线是一条双向单线接口,最大传输速率为20kbit/s。
与一般的通信总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性,它在汽车领域上的应用最为广泛,世界上一些著名的汽车制造厂商都采用了CAN总线来实现汽车内部控制系统与各检测和执行机构间的数据通信。
绪论我在汽车销售服务有限公司进行售后维修实习。
在来这九个多月的时间里,首先我对汽车4S店的零部件供给、售后服务流程有了相关了解,其次学会了维修设备:举升机、轮胎动平衡机、部分专用工具等的使用,还有掌握了对检测仪器:DAS电脑检测仪、电池测试仪、万用表等的一般使用,以及对车间信息系统软件能熟练运用。
实习期间我主要从事汽车保养工作。
汽车保养是很重要的,买的一辆新车,首先要懂得如何保养。
汽车保养需求做的几项任务:干净汽车表面,检查门窗玻璃、刮水器、室内镜、后视镜、门锁与升降器手摇柄能否完全有效。
检查散热器的水量、曲轴箱内的机油量、油箱内的燃油储量、蓄电池内的电解液液面高度能否符合请求。
检查喇叭、灯光能否完全、有效,安装能否结实。
检查转向机构各连接部位能否松旷,安装能否结实。
检查轮胎气压能否充足,并肃清胎间及胎纹间杂物。
检查转向盘的游动间隙能否符合标准;轮毂轴承、转向节主销能否松动。
汽车保养除了换机油外,还要用电脑检测仪检查车各个电控部件能否正常。
检查发动机机油液位,发动机冷冻液液位,助力转向油液位,刹车油油位和轮胎气压。
谈到轮胎气压,很多车主看到车轮很扁,以为气压不足,而给汽车车胎打气,直至不扁。
实际上这是错的。
太高的轮胎气压,造成轮胎过早磨损,在高速公路行驶时,简单发作爆胎,非常风险。
轮胎气压太低也不好,最好按各车的标准,可查随车手册或油箱盖上的说明标签。
在这次实习中我认识到要把这项技术学习好,首先要有丰富的理论知识,要有灵活的思维,要有精心钻研的意志,只有这样才能吧车迅速的修好。
所以我在工作之余就会到公司技术部去借阅资料,当我看到“汽车CAN总线系统”资料时不禁眼前一亮。
虽然看起来有些枯燥,但却是汽车诊断维修必不可少的理论基础。
主体一、CAN总线特点CAN总线是一种串行数据通信协议,其通信接口中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等项工作。
CAN总线特点如下:(1)多主机方式工作,网络上任意一个节点均可以在任意时刻主动地向网络上的其他节点发送信息,而不分主从,通信方式灵活。
(2)网络上的节点(信息)可分成不同的优先级,可以满足不同的实时要求。
(3)采用非破坏性位仲裁总线结构机制,当两个节点同时向网络上传送信息时,优先级低的节点主动停止数据发送,而优先级高的节点可不受影响地继续传输数据。
(4)可以点对点、一点对多点(成组)及全局广播几种传送方式接收数据。
(5)直接通信距离最远可达6km(速率10Kbps以下)。
(6)通信速率最高可达1MB/s(此时距离最长30m)。
(7)节点数实际可达110个。
(8)采用短帧结构,每一帧的有效字节数为8个。
(9)每帧信息都有CRC校验及其它检错措施,数据出错率极低。
(10)通信介质可采用双绞线,同轴电缆和光导纤维,一般采用廉价的双绞线即可,无特殊要求。
(11)节点在错误严重的情况下,具有自动关闭总线的功能,切断它与总线的联系,以使总线上的其他操作不受影响。
二、CAN 的工作原理车身系统的控制单元多为低速马达和开关量器件,对实时性要求低而数量众多。
使用低速的总线连接这些电控单元。
将这部分电控单元与汽车的驱动系统分开,有利于保证驱动系统通信的实时性。
此外,采用低速总线还可增加传输距离、提高抗干扰能力以及降低硬件成本。
动力与传动系统的受控对象直接关系汽车的行驶状态,对通讯实时性有较高的要求。
因此使用高速的总线连接动力与传动系统。
传感器组的各种状态信息可以广播的形式在高速总线上发布,各节点可以在同一时刻根据自己的需要获取信息。
这种方式最大限度地提高了通信的实时性。
故障诊断系统是将车用诊断系统在通信网络上加以实现。
信息与车载媒体系统对于通讯速率的要求更高,一般在2 Mb/s以上。
采用新型的多媒体总线连接车载媒体。
这些新型的多媒体总线往往是基于光纤通信的,从而可以充足保证带宽。
网关是电动汽车内部通信的核心,通过它可以实现各条总线上信息的共享以及实现汽车内部的网络管理和故障诊断功能。
CAN总线标准包括物理层、数据链路层,其中链路层定义了不同的信息类型、总线访问的仲裁规则及故障检测与故障处理的方式。
当CAN 总线上的一个节点(站)发送数据时,它以报文形式广播给网络中所有节点。
每组报文开头的11位字符为标识符,定义了报文的优先级,这种报文格式称为面向内容的编址方案。
当一个节点要向其它节点发送数据时,该节点的CPU 将要发送的数据和自己的标识符传送给本节点的CAN芯片,并处于准备状态;当它收到总线分配时,转为发送报文状态。
CAN 芯片将数据根据协议组织成一定的报文格式发出,这时,网上的其它节点处于接收状态。
每个处于接收状态的节点对接收到的报文进行检测,判断这些报文是否是发给自己的,以确定是否接收它。
由于CAN总线是一种面向内容的编址方案,因此很容易建立高水准的控制系统并灵活地进行配置。
可以很容易地在CAN 总线中加进一些新节点而无需在硬件或软件上进行修改。
三、汽车电子网络结构:在汽车内部采用基于总线的网络结构,可以达到信息共享、减少布线、降低成本以及提高总体可靠性的目的。
通常的汽车网络结构采用多条不同速率的总线分别连接不同类型的节点,并使用网关服务器来实现整车的信息共享和网络管理,如图1所示。
四、CAN总线标准、协议国际上众多知名汽车公司早在20世纪80年代就积极致力于汽车网络技术的研究及应用,迄今为止,已有多种网络标准。
目前存在的多种汽车网络标准,其侧重的功能有所不同。
为方便研究和设计应用,SAE(美国汽车工程师协会)将汽车数据传输网划分为A、B、C三类。
A类是面向独立模块间数据共享的中速网络,传输速率在10-125 kb/s,主要应用于车身电子舒适性模块、仪表显示等系统;B类是面向高速、实时闭环控制的多路传输网,位速率在125 kb/s-1 Mb/s之间,主要用于牵引控制、先进发动机控制、ESP等系统;C类是面向传感器/执行器控制的低速网络,数据传输位速率通常小于1O kb/s,主要用于后视镜调整,电动窗、灯光照明等控制。
(1) A类总线标准、协议A类中的国际标准是CAN总线。
CAN总线是德国BOSCH公司从20世纪80年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议,它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维。
通信速率可达1Mb/s。
CAN总线通信接口中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、检验、优先级判别等项工作。
CAN协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码,最多可标识2048(2.OA)个或5亿(2.OB)多个数据块。
采用这种方法的优点可使网络内的节点个数在理论上受限制。
数据段长度最多为8个字节,不会占用总线时间过长,从而保证了通信的实时性。
CAN协议还可提供相应的错误处理功能,保证了数据通信的可靠性。
A类标准总线传输速率在100kb/s左右。
从1992年起欧洲大部分汽车公司,一直采用A类标准总线,所使用的传输速率范围从47.6-500kb/s不等。
(2)B类高速总线系统标准、协议由于高速总线系统主要用于与汽车安全相关,以及实时性要求比较高的地方,如动力系统等,所以其传输速率比较高。
根据传统的SAE的分类,该部分属于B类总线标准,通常在125kb/s-1Mb/s之间,必须支持实时的周期性的参数传输。
目前,随着汽车网络技术的发展,未来将会使用到具有高速实时传输特性的一些总线标准和协议,包括采用时间触发通讯的系统总线标准和用于安全气囊控制和通讯的总线标准、协议。
B类总线标准、协议是用来支持分布在车辆各个不同位置的电控单元之间实现实时闭环控制功能的高速通信标准,其数据传输速率为250kb/s。
(3)C类总线标准、协议C类网络使用起来既简单又经济,但随着技术的发展,预计在今后几年中将会逐步在汽车通信系统中被停止使用。
目前首选的标准是LIN。
LIN是用于汽车分布式电控系统的一种新型低成本串行通信系统,它是一种主从结构的单线12V的总线通信系统,主要用于智能传感器和执行器的串行通信,而这正是CAN总线的带宽和功能所不要求的部分。
由于目前尚未建立低端多路通信的汽车标准,因此LIN正试图发展成为低成本的串行通信的行业标准。
LIN的标准简化了现有的基于多路解决方案的低端CAN,同时将降低汽车电子装置的开发、生产和服务费用。
LIN采用低成本的单线连接,传输速度最高可达20kb/s,对于低端的大多数应用对象来说,这个速度是可以接受的。
在下表中,给出了LIN总线以及下列其他各类典型汽车总线标准、协议特性和参数。
五、CAN的报文格式在总线中传送的报文,每帧由7部分组成。
CAN协议支持两种报文格式,其唯一的不同是标识符(ID)长度不同,标准格式为11位,扩展格式为29位。
在标准格式中,报文的起始位称为帧起始(SOF),然后是由11位标识符和远程发送请求位 (RTR)组成的仲裁场。
RTR位标明是数据帧还是请求帧,在请求帧中没有数据字节。
控制场包括标识符扩展位(IDE),指出是标准格式还是扩展格式。
它还包括一个保留位,为将来扩展使用。
它的最后四个字节用来指明数据场中数据的长度(DLC)。
数据场范围为0~8个字节,其后有一个检测数据错误的循环冗余检查(CRC)。