大学生数学建模竞赛A题参考答案
2012年全国大学生数学建模竞赛a题 葡萄酒的评价 答案.
葡萄酒的评价摘要本文主要研究的是如何对葡萄酒进行评价的问题。
通过对评酒员的评分与酿酒葡萄的理化指标和葡萄酒的理化指标等原始数据进行统计、分析和处理,我们得出了一个较为合理地评价葡萄酒质量优劣的模型。
在问题一中,我们采用T检验法,首先进行正态分布拟合检验,判断出它们服从正态分布。
之后,我们通过T检验法判断出了两组评酒员的评价结果具有显著性差异。
而对于如何判断哪一组评酒员的评价结果更可信,由于评酒员评分的客观性,我们通过计算评酒员评分均值的置信区间,利用置信区间的长短来判断评分的可信程度。
置信区间越窄,说明其越可信。
利用Matlab软件求出了第二组评酒员的评分均值的置信区间更窄,所以第二组评酒员的评价结果更可信。
在问题二中,我们采用主成分分析法,把给定的一组相关变量通过线性变换转成另一组不相关的变量,这些新的变量再按照方差依次递减的顺序排列。
在数学变换中保持变量的总方差不变,使第一变量具有最大的方差。
第二变量的方差次大,并且和第一变量不相关。
由于变量较多,虽然每个变量都提供了一定的信息,但其重要性有所不同。
依次类推,最后我们将酿酒葡萄分为了四个等级:优质、次优、中等、下等。
在问题三中,我们通过多项式曲线拟合的方法,构造一个以葡萄酒的理化指标为自变量,酿酒葡萄的理化指标为因变量的函数,并利用Matlab软件进行曲线拟合,最后得出酿酒葡萄与葡萄酒的理化指标之间的关系为呈线性正相关。
在问题四中,我们用无交互作用的双因素试验的方差分析方法,通过对观测、比较、分析实验数据的结果,鉴别出了两个因素在水平发生变化时对实验结果产生显著性影响的大小程度。
最后,我们认为能用酿酒葡萄和葡萄酒的理化指标来评价葡萄酒的质量,且酿酒葡萄的理化指标对葡萄酒质量影响相对葡萄酒的理化指标更显著。
关键词:T检验法,Matlab,正态分布,主成分分析法,多项式曲线拟合,方差分析一.问题的重述确定葡萄酒质量时一般是通过聘请一批有资质的评酒员进行品评。
广西大学数学建模考试试题A及参考答案

广西大学数学建模考试试题A及参考答案一.概念题(共3小题,每小题5分,本大题共15分)1、什么是数学模型?(5分)答:数学模型可以描述为,对于现实世界的一个特定对象,为了一个特定目的,根据特有的内在规律,做出一些必要的简化假设,运用适当的数学工具,得到的一个数学结构。
2、数学建模有哪几个过程?(5分)答:数学建模有如下几个过程:模型准备,模型假设,模型构成,模型求解,模型分析,模型检验,模型应用。
3、试写出神经元的数学模型。
答:神经元的数学模型是其中某=(某1,…某m)输入向量,y为输出,wi是权系数;输入与输出具有如下关系:Tθ为阈值,f(某)是激发函数;它可以是线性函数,也可以是非线性函数.(5分)二、模型求证题(共2小题,每小题10分,本大题共20分)1、(l)以雇员一天的工作时间t和工资w分别为横坐标和纵坐标,画出雇员无差别曲线族的示意图。
解释曲线为什么是你画的那种形状。
(5分)(2)如果雇主付计时工资,对不同的工资率(单位时间的工资)画出计时工资线族。
根据雇员的无差别曲线族和雇主的计时工资线族,讨论双方将在怎样的一条曲线上达成协议。
(5分)答:(l)雇员的无差别曲线族f(w,t)=C是下凸的,如图1,因为工资低时,他愿以较多的工作时间换取较少的工资;而当工资高时,就要求以较多的工资来增加一点工作时间.(2)雇主的计时工资族是w=at,a是工资率.这族直线与f(w,t)=c的切点P1,P2,P3,…的连线PQ为雇员与雇主的协议线.通常PQ是上升的(至少有一段应该是上升的),见图1.2、试作一些合理的假设,证明在起伏不平的地面上可以将一张椅子放稳。
(7分)又问命题对长凳是否成立,为什么?(3分)答:(一)假设:电影场地面是一光滑曲面,方凳的四脚连线构成一正方形。
如图建立坐标系:其中A,B,C,D代表方凳的四个脚,以正方形ABCD的中心为坐标系原点。
图二记H为脚A,C与地面距离之和,G为脚B,D与地面距离之和,θ为AC连线与某轴的夹角,不妨设H(0)>0,G(0)=0,(为什么)令f(θ)=H(θ)-G(θ)则f是θ的连续函数,且f(0)=H(0)>0,将方凳旋转90°,则由对称性知H(π/2)=0,G(π/2)=H(0)从而f(π/2)=-H(0)<0由连续函数的介值定理知,存在θ∈(0,π/2),使f(θ)=0(二)命题对长凳也成立,只须记H为脚A,B与地面距离之和,G为脚C,D与地面距离之和,θ为AC连线与某轴的夹角,将θ旋转180同理可证。
深圳杯数学建模竞赛a题
深圳杯数学建模竞赛a题一、在研究某城市交通流量优化问题时,团队首先需要收集的数据是:A. 各路段每日平均车流量B. 市民对公共交通的满意度调查C. 城市历史气温变化记录D. 各区域人口密度分布图(答案:A)二、针对疫情传播模型,以下哪个因素不是构建模型时需要考虑的关键参数:A. 传染率B. 恢复率C. 疫苗接种比例D. 城市绿化覆盖率(答案:D)三、在评估一项环保政策对空气质量的影响时,最直接的评估指标是:A. 政策实施前后的GDP增长率B. PM2.5浓度变化C. 居民人均消费水平D. 新能源汽车销量增长(答案:B)四、在设计一个物流配送系统的优化方案时,以下哪个不是主要优化目标:A. 最小化配送时间B. 最大化车辆装载率C. 提升客户满意度D. 增加仓库库存量(答案:D)五、在利用大数据分析预测股票市场走势时,以下哪项数据可能不会被纳入分析:A. 历史股票价格数据B. 宏观经济指标C. 社交媒体情绪分析D. 当天天气预报(答案:D)六、在构建一个城市供水网络的优化模型时,以下哪个因素不是必须考虑的约束条件:A. 水管的最大流量限制B. 水质安全标准C. 水泵的工作效率D. 城市居民的年龄分布(答案:D)七、在研究电商平台的推荐算法优化时,以下哪个指标最能反映推荐系统的效果:A. 用户平均浏览时间B. 商品点击率到购买率的转化率C. 平台日活跃用户数D. 新增商品上架数量(答案:B)八、在制定一项减少食物浪费的政策时,以下哪项措施与直接减少浪费关联度最低:A. 推广食物保鲜技术B. 增强公众节约意识教育C. 优化超市库存管理D. 增加城市绿化面积(答案:D)。
数学建模2021a题

数学建模2021a题
2021年数学建模竞赛A题《太阳影子定位》答案如下:
1. 建立影子长度变化的数学模型
根据日出和日落时间,确定太阳的高度角变化范围,再根据影子的长度变化,得到太阳高度角与影子长度之间的关系。
利用这个模型,可以预测任何给定时间点的影子长度。
2. 建立基于深度学习的模型
使用深度学习技术,建立一个能够预测影子长度的模型。
该模型可以处理大量的历史数据,并使用这些数据来训练模型,使其能够准确预测未来的影子长度。
3. 建立基于时间序列分析的模型
利用时间序列分析技术,建立一个能够预测影子长度的模型。
该模型可以处理时间序列数据,并使用这些数据来训练模型,使其能够准确预测未来的影子长度。
4. 建立基于神经网络的模型
利用神经网络技术,建立一个能够预测影子长度的模型。
该模型可以处理非线性数据,并使用历史数据来训练模型,使其能够准确预测未来的影子长度。
5. 综合以上三种方法
结合深度学习、时间序列分析和神经网络技术,建立一个综合性的模型。
该模型可以处理大量的历史数据,并使用这些数据来训练模型,使其能够准确预测未来的影子长度。
以上答案仅供参考,如有疑问,建议咨询专业人士。
全国大学生数学建模大赛国家一等奖论文A题
=
− − ( − 1)′
, = 1, 2, · · ·, 210
当逐渐增大,锚链受到的竖直向下方向的合力与支持力之差先逐渐接近于0,
再等于0,直至小于0。当合力小于0时,锚链以海床接触,此时海床提供向上的支持
力,其大小与′ 相等。因此可将小于0 的值都作零处理,故锚链接触海床时,
对于问题二,首先考虑第一个子问题,将风速36/直接代入问题一的模型中,
得出此条件下的吃水深度为0.723,各钢管倾斜角度(度)依次为8.960、9.014、9.068
、9.123,钢桶倾斜角(度)为9.179,锚链链接处的切线方向与海床的夹角(度)为18.414,
游动区域半径为18.80。发现此条件下,水声通讯系统设备的工作效果较差,且锚被
计与应用对海上科学发展有重要意义。
1.2 问题的提出
已知某近浅海传输节点(如图1所示),将浮标视作底面直径2为、高为2、质量
为1000的圆柱体,锚的质量为600,钢管共4节,每节长度为1,直径为50,
每节钢管的质量为10。水声通讯系统安装在一个长为1、外径为30的密封圆
柱形钢桶内,设备和钢桶总质量为100。
Step1: 遍历求解
令吃水深度ℎ的初始值为0.1,以0.0005为单位逐步增加至2。( 浮标高度为2,
完全浸没时吃水深度ℎ则为2 ),记录对应的数据,选取水下物体竖直方向高度和
与海域水深最接近的组别,进一步进行计算,结果如下表所示(具体程序见附录):
表 1: 不同风速的相关结果表
以风速24/的情况为例,绘制游动区域图:
题意的变量临界值。以水深16、系统各部分递推关系式和钢桶与竖直方向夹角小
于5°为约束条件,将多目标优化转化为单目标优化。通过调节决策变量中锚链的型
数学建模试卷A参考答案
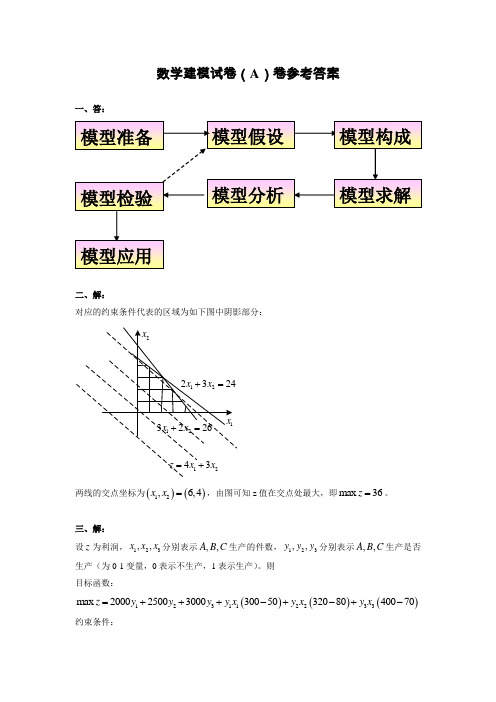
数学建模试卷(A )卷参考答案一、答:二、解:对应的约束条件代表的区域为如下图中阴影部分:两线的交点坐标为()()12,6,4x x =,由图可知z 值在交点处最大,即max 36z =。
三、解:设z 为利润,123,,x x x 分别表示,,A B C 生产的件数,123,,y y y 分别表示,,A B C 生产是否生产(为0-1变量,0表示不生产,1表示生产)。
则 目标函数:()()()123112233max 200025003000300503208040070z y y y y x y x y x =+++-+-+-约束条件:1231231231231232350024000350000,0,0;,0 1;x x x x x x x x x x x x y y or ++≤⎧⎪++≤⎪⎨++≤⎪⎪≥≥≥=⎩四、解:(一)(二)目标层准则层方案层11/2433217551/41/711/21/31/31/52111/31/5311A ⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦1(),0,ij n n ij ji ijA a a a a ⨯=>=层次分析法的基本步骤成对比较阵和权向量元素之间两两对比,对比采用相对尺度设要比较各准则C 1,C 2,… , C n 对目标O 的重要性:i j ijC C a ⇒A ~成对比较阵 A 是正互反阵要由A 确定C 1,… , C n 对O 的权向量选择旅游地(三)111122221212n n n n n n w w w w w w w w w w w w A w w w w w w ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎤⎥⎢⎥⎢⎥⎣⎦23a =一致比较允许不一致,但要确定不一致的允许范围考察完全一致的情况12(1),,nW w w w =⇒/ij i ja w w =令12(,,)~T n w w w w =权向量“选择旅游地”中准则层对目标的权向量及一致性检验11/2433217551/41/711/21/31/31/52111/31/5311A ⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦准则层对目标的成对比较阵最大特征根λ=5.073权向量(特征向量)w =(0.263,0.475,0.055,0.090,0.110)T 5.07350.01851CI -==-一致性指标随机一致性指标 RI=1.12 (查表) 一致性比率CR =0.018/1.12=0.016<0.1通过一致性检验五、解:()221max ni i i a bx y =+-∑,对,a b 分别求偏导数,可以求解得0.9726,0.0500b a ==。
全国大学生数学建模竞赛a题(2255)
优秀论文选编A题之一(全国一等奖)奥运会临时超市网点设计广西师范大学,吴宗显、单俊辉、谭春亮;指导教师:数学建模组摘要:本文首先根据问卷调查数据计算观众出行、用餐和购物等方面的分布,分析各种分布的特点。
然后,根据观众出行、用餐分布,场馆分布情况和最短距离原则,测算出测算20个商区的人流量及其分布。
最后,根据商圈分析中零售引力法则(即里利法则)、哈夫概率模型、饱和理论,建立设计MS网点大小规模类型的数学模型。
在约定大规模MS网点的面积为1个单位的基础上,经过计算求解,得到小规模MS网点的面积为0.6个单位,并得出20个MS网点的设计方案,具体设计方案是:A区有2个大规模MS网点,分别设在A6小区和A1小区,其余8个小区均为小规模MS网点;B区有2个大规模MS网点,分别设在B6小区和B3小区,其余4个小区均为小规模MS网点;C区有1个大规模MS网点,设在C4小区,其余3个小区均为小规模MS网点。
奥运会临时超市网点设计一、问题的分析与基本假设(一)问题的分析题目要求完成如下工作:1、根据附录中给出的问卷调查数据,找出了观众在出行、用餐和购物等方面所反映的规律2、在一天内每位观众平均出行两次,一次为进出场馆,一次为餐饮,并且出行均采取最短路径前提下。
依据1的结果,测算图2中20个商区的人流量分布。
3、按照满足奥运会期间的购物需求、分布基本均衡和商业上赢利的要求,根据流量分布规律,在有两种大小不同规模的MS类型供选择情况下,给出图2中20个商区内MS网点的设计方案(即每个商区内不同类型MS的个数)。
(二)基本假设1、假定A区(国家体育场)容量为10万人,B区(国家体育馆)容量为6万人,C区(国家游泳中心)容量为4万人。
三个场馆的每个看台容量均为1万人,出口对准一个商区,各商区面积相同。
2、无论乘坐何种交通工具的观众所持的票号是随机的。
二、问卷调查数据的统计与分布规律我们把附录中三次调查的数据综合起来并进行的统计和分析得出的观众在出行、用餐和购物等方面的规律如下:1、整个人群的各种行为的分布规律(1)用不同的交通方式的人数及其分别所占总人数的比例除私车方式偏少一些(仅有9.0377%)外,其余方式分布都比较均匀,均为16%-20%,这说明场馆周围布局的交通车站是比较合理的。
A题--吉林省第九届大学生数学建模竞赛

赛题A:机械零件加工过程中的位置识别“中国制造2025”是在新的国际国内环境下,中国政府立足于国际产业变革大势,作出的全面提升中国制造业发展质量和水平的重大战略部署。
在“智能制造工程”的大背景下,智能制造成为大家讨论的热点问题。
本题目讨论研究机械加工零件在自动化生产线加工过程中零件位置识别问题。
在工业制造自动生产线中,在装夹、包装、分拣等工艺过程中需要根据图像处理利用计算机自动智能识别零件特定位置,并由机械手自动搬运到特定位置(标准位置)。
某零件轮廓示意图如图1所示,图2表示零件搬运前后的位置示意图。
图1 零件轮廓示意图图2 零件位置图(注:红色为放置在平面上任意位置的零件轮廓;黑色为零件标准位置的轮廓图)数据文件说明:本题目提供的数据文件包括3个图像数据附件,分别为DATA 1、DATA 2、DATA3。
3个数据文件可以用MATLAB软件中的load命令读取,用imshow函数显示零件的图像轮廓。
其中,数据文件DATA1为机械手抓取零件后所放置的标准位置,零件轮廓数据可以视为被抓取零件的模板数据;数据文件DATA2为机械手抓取零件前需要计算机自动识别出的单个零件图像轮廓数据;数据文件DATA3为机械手抓取零件前需要计算机自动识别出的多个零件图像轮廓数据。
所有图像数据均由安置于固定位置的同一相机拍摄,且焦距固定,被拍摄零件均放置于同一高度的平面上。
问题1:根据题目给出的零件轮廓数据DATA2,请建立模型识别计算出给定零件的位置坐标,尽量尝试提供多种模型或求解算法,并分析评价给出求解零件位置算法的计算速度是否快速高效,给出每种方法的识别时间。
问题2:前面讨论的都是单个零件放置于平面上的情况,对于多个零件显示在同一图像中的情况,应如何建立模型,请根据已给出数据DATA3识别不同零件的位置。
问题3:前面讨论的都是给定零件的位置识别问题,请讨论分析能否运用你们的方法或模型识别其他形状的零件。
建议自己寻找或设定某种特定形状的零件轮廓图进行识别验证,分析所提供模型或方法的通用性。
数学建模a题答案
葡萄酒的质量葡萄酒的质量即葡萄酒优秀的程度,它是产品的一种特性,且决定购买者的可接受性。
因此,葡萄酒能够满足人类需求的各种特性的总和即构成了它的质量。
葡萄酒质量属性主要指:复杂性、协调性以及能够激发消费者感情的能力;复杂性意味着葡萄酒有浓郁的令人愉快的香气与滋味,及它的潜力与精巧性。
协调性是指各种感官成分的结合是平衡的,每一种成分与其它成分相比,它的存在及其含量是非常适宜的,而且它的复杂性、颜色强度、香气、滋味、后味是稳定一致的。
影响质量的因素葡萄酒是葡萄的发酵产品,所以葡萄酒的质量取决于原料的质量、所采用的加工工艺及相应的陈酿技术。
影响质量的因素有:——品种及其适应性;——适宜于品种良好生长的生态条件(包括土壤、大气候、微区气候);——原料的质量:包括葡萄的成熟度(糖酸及其平衡、酚类、香味成分的种类及其比例)、葡萄的新鲜度及健康卫生状况;——酿酒工艺:采用的酵母菌、浸渍方式与发酵时间,发酵温度,分离时间,压榨方式等;——陈酿技术:采用的贮藏容器及贮藏时间,是否带酒脚贮藏,瓶贮与否及时间长短等。
葡萄酒质量的评价葡萄酒质量的评价是人们为了反映葡萄酒的客观性而人为采取的一些方法,主要包括感官指标,理化指标,卫生指标。
感官指标包括葡萄酒的外观(颜色、浓度、色调、澄清度、气泡存在与否及持续性);香气(类型、浓度、和谐程度);滋味(协调性、结构感、平衡性、后味等);典型性(外观、香气与滋味之间的平衡性);感官指标是评价葡萄酒质量的最终及最有效的指标。
理化指标指由葡萄酒的成分(糖、酒精、矿物质元素、干浸出物、有机酸等)所构成的指标。
卫生指标指葡萄酒中的微生物(酵母菌、细菌、大肠杆菌)和一些对人体健康有影响的限量成分。
下面主要论述酿酒葡萄和葡萄酒的理化指标对葡萄酒的影响酿酒葡萄的理化指标与葡萄酒质量的关系酿酒行业很多人把葡萄园作为葡萄酒厂的第一车间,这个比喻充分说明了原料质量对成品质量的重要性。
葡萄酒厂关注葡萄质量的主要理化指标是糖含量和干浸出物。
202313届数学建模a题
202313届数学建模a题(原创实用版)目录一、数学建模概述二、2023 年 13 届数学建模 A 题解析三、解题思路与方法四、结论正文一、数学建模概述数学建模是一种利用数学方法来解决实际问题的科学研究方法,它通过建立数学模型,对实际问题进行抽象、简化和求解,从而揭示问题的本质和规律。
数学建模在各个领域中都有广泛的应用,例如物理、化学、生物、经济等。
数学建模能力是研究和解决复杂问题的重要手段,也是培养创新人才的重要途径。
二、2023 年 13 届数学建模 A 题解析2023 年 13 届数学建模竞赛 A 题的题目为:“某城市交通拥堵问题研究”。
题目要求参赛选手通过建立数学模型,分析城市交通拥堵的原因,并提出解决策略。
此题考查了参赛选手对城市交通系统的理解、数学建模能力的运用以及解决实际问题的能力。
三、解题思路与方法1.对题目进行仔细阅读和分析,明确题目要求和背景。
2.了解城市交通系统的基本构成和运行原理,包括城市道路网络、交通流、交通信号等。
3.确定数学模型的建立方法,如微分方程模型、排队论模型、图论模型等。
4.根据实际情况和题目要求,建立城市交通拥堵模型,并分析模型的性质和稳定性。
5.对模型进行求解和计算,得出城市交通拥堵的原因和解决策略。
6.根据计算结果,提出具体的解决措施,如改进交通信号控制、优化道路网络结构、推广公共交通等。
四、结论数学建模是一种重要的科学研究方法,它能帮助我们解决实际问题,提高研究和创新能力。
通过对 2023 年 13 届数学建模 A 题的解析,我们可以发现,解决这类问题需要对实际问题进行深入了解,运用适当的数学模型进行分析和求解,并根据结果提出具体的解决措施。
深圳杯数学建模A题答案完整版
深圳杯数学建模A题答案HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】摘要深圳作为中国经济发展的重点城市,人口与医疗问题已经成为我们的焦点话题,是一个复杂的系统工程。
本文针对深圳地区人口年龄分布情况,外来务工人员的数量,从实际出发,在基于一些合理简化假设的基础上,建立数学模型,并充分利用matlab等软件简化计算,对相关问题进行了有针对性的求解。
在预测未来十年深圳常住人口时,我们运用了matlab一元线性回归对近十年的数据进行了多次拟合,并对这些拟合进行了比较得出深圳常住人口模型公式为:2=+-+, 通过拟合预测出了未来十年深圳市常住人口的Q x e x x() 1.00050.00838.1671数量,同时在网上2000年到2010年的人口结构的数据,通过Leslie矩阵预测出了未来十年人口结构的分布。
通过分析深圳近人口数量和人口结构的变化,预测未来十年深圳市人口数量和结构的发展趋势,以此为基础预测未来全市和各区医疗床位需求呈线性递增趋势。
同时选取了高血压,脑出血,癌症这三种疾病进行预测,运用matlab最小二乘法散点拟合,得出这三种疾病的发展趋势,由此预测出未来十年这三种疾病的就医的床位需求。
关键词:matlab、一元线性回归、Leslie、最小二乘法、床位需求一、问题重述从深圳的人口的结构来看,显着的特点是流动人口远远超过户籍人口,且年轻人口占主绝对优势。
流动人口主要从事第二、三产业的企业一线工人等。
年轻人身体好,发病少,导致深圳目前人均医疗设施低于全国类似城市平均水平,但仍能满足现有人口的就医需求。
然而,政策的调整与世界的推移会使深圳市老年人增加。
产业结构的变化也会影流动人口的数量。
直接会导致深圳市未来的医疗需求的变化。
现有人口社会发展模型在面对深圳情况时,难以满足人口和医疗预测的要求。
为了解决此问题,请根据深圳人口发展变化态势以及全社会医疗卫生资源投入情况(医疗设施、医护人员结构等方面)收集数据、建立针对深圳具体情况的数学模型,预测深圳未来的人口增长和医疗需求,解决下面几个问题:1.分析深圳近十年常住人口、非常住人口变化特征,预测未来十年深圳市人口数量和结构的发展趋势,以此为基础预测未来全市和各区医疗床位需求;2.根据深圳市人口的年龄结构和患病情况及所收集的数据,对几种病进行预测,在不同类型的医疗机构就医的床位需求。
(完整版)数学建模期末试卷A及答案

用。
且阻滞作用随人口数量增加而变大,从而人口增长率 r(x) 是人口数量 x(t) 的的减函数。
假设 r(x) 为 x(t) 的线性函数:
The shortest way to do many things is
r(x) r sx (r 0, s 0)
,
其中, r 称为人口的固有增长率,表示人口很少时(理论上是 x 0 )的增长率。
在每个生产周期T 内,开始一段时间( 0 t T0 ) 边生产边销售,后一段时间(T0 t T )只销售不 生产,存贮量 q(t) 的变化如图所示。设每次生产开工
费为 c1 ,每件产品单位时间的存贮费为 c2 ,以总费用最小为准则确定最优周 期T ,并讨论 r k 和 r k 的情况。
c(T )
某家具厂生产桌子和椅子两种家具,桌子售价 50 元/个,椅子销售价格 30 元/个,生 产桌子和椅子要求需要木工和油漆工两种工种。生产一个桌子需要木工 4 小时,油漆工 2 小时。生产一个椅子需要木工 3 小时,油漆工 1 小时。该厂每个月可用木工工时为 120 小 时,油漆工工时为 50 小时。问该厂如何组织生产才能使每月的销售收入最大?(建立模型 不计算)(10’)
s r 当 x xm 时人口不再增长,即增长率 r(xm ) 0 ,代入有 xm ,从而有
根据 Malthus 人口模型,有
r(x)
r1
x xm
,
dx r(1 x )x
dt
xm
x(0) x0
4.(25 分)已知 8 个城市 v0,v1,…,v7 之间有一个公路网(如图所示), 每条公路为图中的边,边上的权数表示通过该公路所需的时间.
(1)设你处在城市 v0,那么从 v0 到其他各城市,应选择什么路径使所需 的时间最短? (1) v0 到其它各点的最短路如下图:
数学建模 综合题目参考答案

综合题目参考答案1. 赛程安排(2002年全国大学生数学建模竞赛D 题)(1)用多种方法都能给出一个达到要求的赛程。
(2)用多种方法可以证明n 支球队“各队每两场比赛最小相隔场次r 的上界”(如n =5时上界为1)是⎥⎦⎤⎢⎣⎡-23n ,如: 设赛程中某场比赛是i ,j 两队, i 队参加的下一场比赛是i ,k 两队(k ≠j ),要使各队每两场比赛最小相隔场次为r ,则上述两场比赛之间必须有除i ,j ,k以外的2r 支球队参赛,于是32+≥r n ,注意到r 为整数即得⎥⎦⎤⎢⎣⎡-≤23n r 。
(3)用构造性的办法可以证明这个上界是可以达到的,即对任意的n 编排出达到该上界的赛程。
如对于n =8, n =9可以得到:可以看到,n =8时每两场比赛相隔场次数只有2,3,4,n =9时每两场比赛相隔场次数只有3,4,以上结果可以推广,即n 为偶数时每两场比赛相隔场次数只有22-n ,12-n ,2n ,n 为奇数时只有23-n ,21-n 。
(4)衡量赛程优劣的其他指标如平均相隔场次 记第i 队第j 个间隔场次数为ij c ,2,2,1,,,2,1-==n j n i ,则平均相隔场次为∑∑=-=-=n i n j ij c n n r 121)2(1 r 是赛程整体意义下的指标,它越大越好。
可以计算n =8,n =9的r ,并讨论它是否达到上界。
相隔场次的最大偏差 定义||,r c M a x f ij j i -=∑-=--=21|)2(|n j ij r n c Max gf 为整个赛程相隔场次的最大偏差,g 为球队之间相隔场次的最大偏差,它们都是越小越好。
可以计算n =8,n =9的f ,g ,并讨论它是否达到上界。
参考文献工程数学学报第20卷第5期20032. 影院座位设计建立满意度函数),(βαf ,可以认为α和β无关, ()()βαβαh g f -=),(,g ,h 取尽量简单的形式,如αα=)(g ;0)(=βh (030≤β),0)(h h =β)30(0>β。
数学建模期末考试A试的题目与答案
数学建模期末考试A试的题目与答案LEKIBM standardization office【IBM5AB- LEKIBMK08-华南农业大学期末考试试卷(A卷)2012-2013学年第二学期考试科目:数学建模考试类型:(闭卷)考试考试时间:120 分钟学号姓名年级专业一、(满分12分) 一人摆渡希望用一条船将一只狼,一只羊,一篮白菜从河岸一边带到河岸对面,由于船的限制,一次只能带一样东西过河,绝不能在无人看守的情况下将狼和羊放在一起;羊和白菜放在一起,怎样才能将它们安全的带到河对岸去建立多步决策模型,将人、狼、羊、白菜分别记为i = 1,2,3,4,当i在此岸时记x i = 1,否则为0;此岸的状态下用s =(x1,x2,x3,x4)表示。
该问题中决策为乘船方案,记为d = (u1, u2, u3, u4),当i在船上时记u i = 1,否则记u i = 0。
(1) 写出该问题的所有允许状态集合;(3分)(2) 写出该问题的所有允许决策集合;(3分)(3) 写出该问题的状态转移率。
(3分)(4) 利用图解法给出渡河方案. (3分)解:(1) S={(1,1,1,1), (1,1,1,0), (1,1,0,1), (1,0,1,1), (1,0,1,0)}及他们的5个反状(3分)(2) D = {(1,1,0,0), (1,0,1,0), (1,0,0,1), (1,0,0,0)} (6分)(3) s k+1 = s k + (-1) k d k (9分)(4)方法:人先带羊,然后回来,带狼过河,然后把羊带回来,放下羊,带白菜过去,然后再回来把羊带过去。
或: 人先带羊过河,然后自己回来,带白菜过去,放下白菜,带着羊回来,然后放下羊,把狼带过去,最后再回转来,带羊过去。
(12分)1、二、(满分12分) 在举重比赛中,运动员在高度和体重方面差别很大,请就下面两种假设,建立一个举重能力和体重之间关系的模型:(1) 假设肌肉的强度和其横截面的面积成比例。
车灯线光源的优化设计——_02高教社杯全国大学生数学建模竞赛A题参考答案02A0

车灯线光源的优化设计——_02高教社杯全国大学生数学建模竞赛A题参考答案02A0问题1:车灯线光源的计算安装在汽车头部的车灯的形状为一旋转抛物面,车灯的对称轴水平地指向正前方,其开口半径36毫米,深度21.6毫米。
经过车灯的焦点,在与对称轴相垂直的水平方向,对称地放置长度为4毫米的线光源,线光源均匀分布。
在焦点F正前方25米处的A点放置一测试屏,屏与FA垂直。
请解决下列问题:(1) 计算直射光总功率与反射光总功率之比。
(2) 计算测试屏上直射光的亮区,在有标尺的坐标系中画出其图形。
(3) 计算测试屏上反射光的亮区,在有标尺的坐标系中画出其图形(只须考虑一次反射)。
解: 建立坐标系如下图,记线光源长度为l ,功率为W,B,C点的光强度分别为W和h(l)BW,先求和的表达式,再建立整个问题的数学模型. h(l)h(l)h(l)CCB22x,y以下均以毫米为单位,由所给信息不难求出车灯反射面方程为z,,焦点坐标为60(0,0,15)。
1) 位于点P(0,w,15)的单位能量的点光源反射到点C(0, 2600, 25015)的能量22,,x,ya(,,)b设反射点的坐标为Qxy.记入射向量为,该点反射面外法线方向为,不难得60,c到反射向量满足 ,,,z ,,2a,b c,a,b.,2A C B bc 222记,由r,x,y,2ra,(x,y,w,,15),60 ,b,(x/30,y/30,,1)P ,a c,(c,c,c)从而得的表达式 xyzy 0 Q 2xywc,x2r,900b x 22w(2y,r,900)c, y2r,90042r,1800r,3600wy,810000c,z260(r,900)注意到反射光通过C点,应有kc,,x,xkc,2600,y,y2kc,25015,r/60z2r900,kx,0其中为常数. 从上述第一式可解得或.由此得反射点坐标满足以下两k,,2wy组方程:x,0,5432,y,(w,2600)y,1800y,(1498200w,4680000)y,(9360000w,810000)y,,,1350810000w,2106000000,0.,3750w,y,,13(w2600),,2,x,,5200y,900,y,22CC 通过计算可知,存在,当时第一组方程不存在满足的实根,r,36w,,1.56w,w00C2即无反射点. 而当时,有两个反射点. w,wQ(0,y,y/60),i,1,20iii22,3.8119,w,,1.5609 而第二组方程仅当时存在满足r,36的一对实根,即有两22x,y(,,),个反射点记为. ,xyQ,Q3460若反射点的坐标为,则位于点的单位功率点光源经点反射到CQ(x,y,z)P(0,w,15)Q点的功率密度(单位面积单位时间的能量, 正比于光强度)近似为,cos L,24,PQ其中2222PQ,x,(y,w),(r/60,15) 而为反射向量与z轴的夹角, ,2,r25015/60, cos,.QCh(l),h(l)2)的表达式 BCldw 长的具有单位功率的线光源位于点的长的微小线光源段反射到C点P(0,w,15)的功率密度为4E(w),f(w)/l,,ii,1其中,cos,Ci,w,[,l/2,w]00,2,f(w),,i,1,2,4PQiiC,0,w,[,30,w]0,,cos,i,w,[,3.8119,,1.5609],2fwi(),,,3,4,i4,PQi,0,,[,3.8119,,1.5609]w, l 长的具有单位功率的线光源反射到C点的功率密度为l/2h(l),E(w)dw.C,l/2,类似可得的表达式.相应的反射点方程为 h(l)Bx,0,5432,y(w1300)y1800y(1498200w2340000)y(4680000w810000)y,,,,,,,,,,1350810000w,1053000000,0.,7500w,y,,13(w1300),,2,x,,2600y,900,y,B相应的而第二组方程的有两个反射点的范围为w,[,1.906,,0.7800005].w,,0.78,03) 优化设计的数学模型设线光源的功率为W, 则它反射到B点和C点的功率密度分别为和.h(l),Wh(l),WminWCB,ll问题的数学模型为:,s.t.h(l)W20,,B0,,,h(l)W1C,,三. 模型的求解h(l),h(l)可以用数值积分求得. 应具备下列性质: h(l)BCBB,0,0ll2w,,,B0,'h(l),lll,,,, ,BBB',,lll,,,B0,'lh(l)l其中为起亮值,为最大值点,为考察的最大范围,例如取为20mm。
2023年高教社杯数学建模a题

2023年高教社杯数学建模a题
2023年高教社杯全国大学生数学建模竞赛A题
题目:光伏发电系统中的最大功率点跟踪
光伏发电系统是一种利用太阳能的光生伏打效应将光能转化为直流电的装置。
为了提高光伏发电系统的效率,通常需要实现最大功率点跟踪(MPPT)。
问题1:请简述光伏发电系统的基本原理和最大功率点跟踪的基本原理,并说明为什么需要实现最大功率点跟踪。
问题2:给定一个光伏发电系统的参数和气象数据,如何实现最大功率点跟踪?请提出一种实现最大功率点跟踪的算法,并给出该算法的数学模型。
问题3:请分析你所提出的最大功率点跟踪算法的优缺点,并给出改进方案。
问题4:请根据你所提出的最大功率点跟踪算法,对一个具体的光伏发电系统进行仿真,并给出仿真结果。
问题5:如何将最大功率点跟踪算法应用于实际的光伏发电系统中?请给出实施方案和步骤。
2023年数学建模国赛a题

数学建模国赛a 题一、单选题1.已知m 3=n 4,那么下列式子中一定成立的是( )A .4m =3nB .3m =4nC .m =4nD .mn =12 2.复数满足(12)3z i i -=-,则z 在复平面内对应的点在( )A .第一象限B .第二象限C .第三象限D .第四象限A.1B.2C.3D.123.在三棱锥B ACD -中,若AB AC AD BC BD CD =====,则异面直线AB 与CD 所成角为( )A .30°B .60°C .90°D .120°4.袋中有2个白球,2个黑球,若从中任意摸出2个,则至少摸出1个黑球的概率是( )A .16B .13C .34D .56 5.tan 3π=( )A .3B .3C .1D 36.若命题甲:10x -=,命题乙:2lg lg 0x x -=,则命题甲是命题乙的( )A .充分非必要条件B .必要非充分条件C .充要条件D .非充分也非必要条件7.函数2x y +=的定义域为( )A .{|21}x x x >-≠且B .{|21}x x x ≥-≠且C .)[(21,1,)-⋃+∞D .)((21,1,)-⋃+∞8.已知函数()2,01ln ,0x x f x x x -⎧≤⎪=⎨>⎪⎩,()()g x f x x a =--.若()g x 有2个零点,则实数a的取值范围是( )A.[)1,0-B.[)0,∞+C.[)1,-+∞D.[)1,+∞9.已知集合{}3,1,0,2,3,4A =--,{|0R B x x =≤或3}x >,则A B =( )A.∅B.{}3,1,0,4--C.{}2,3D.{}0,2,310.定义区间[]()1212,x x x x <的长度为21x x -,已知函数||2x y =的定义域为[,]a b ,值域为[1,2],则区间[,]a b 的长度的最大值与最小值的差为( )11.2020年,一场突如其来的“肺炎”使得全国学生无法在春季正常开学,不得不在家“停课不停学”.为了解高三学生居家学习时长,从某校的调查问卷中,随机抽取n 个学生的调查问卷进行分析,得到学生可接受的学习时长频率分布直方图(如下图所示),已知学习时长在[9,11)的学生人数为25,则n 的值为( )A .40B .50C .80D .10012.已知角α的顶点与原点重合,始边与x 轴的非负半轴重合,终边在直线3y x =上,则sin 4πα⎛⎫+= ⎪⎝⎭( )A.25255 D.5二、填空题 13.25(0),()8(0).x x f x x x ⎧+≤⎪=⎨+>⎪⎩14.正方体的棱长扩大到原来的倍,其表面积扩大到原来的( )倍。
2013全国大学生数学建模竞赛A题参考答案
2013全国大学生数学建模竞赛A题参考答案第一篇:2013全国大学生数学建模竞赛A题参考答案2013高教社杯全国大学生数学建模竞赛A题评阅要点[说明]本要点仅供参考,各赛区评阅组应根据对题目的理解及学生的解答,自主地进行评阅。
本题的难点在于通过视频资料获得车流数据,并以此为基础建立数学模型,分析部分车道被占用后,道路拥塞程度与上游来车量的关系。
评阅时请关注如下方面:建模的准备工作(视频中车流数据的提取,包括视频缺失及错误的处理),模型的建立、求解和分析方法,结果的表述,模型的合理性分析及其模型的拓广。
问题1.1.1.道路被占用后,实际的通行能力需要通过视频中的车流数据得到,不能仅由交通道路设计标准估计;1.2.应该根据视频信息给出不同时段、不同情况下车流量的变化,需要给出通行能力的计算方法、理由的陈述或分析;1.3.在被占用道路没有车辆排队时,通行能力等同于单车道情形,但当被占用道路有车辆排队时,由于被占用道路车辆的变道抢行,会使道路的通行能力下降,好的结果应该明确指出这一点。
问题2.2.1.对于视频2 的分析同视频1,需要通过视频2与视频1的数据对比给出通行能力的差异及原因分析;2.2.由于事故横断面下游交通流方向需求不同,会导致上游每条车道分配到的车辆数不同,使两种情况事故所处道路横断面形成多车道排队的机率不同,从而影响实际通行能力。
如果在模型中注意到这一点则更好。
问题3.3.1.建立数学模型,给出交通事故所引起的路段车辆排队长度与事故横断面实际通行能力、事故持续时间、路段上游车流量间的关系;3.2.模型的形式可以多样,但需要包含上述各种因素。
关键考察模型假设的合理性、参数确定的原则、及模型的可计算性。
问题 4.4.1.本问题是问题1 及问题 3 的扩展,可利用问题1 得到的通行能力及问题3 的模型计算结果;4.2.和问题1、3不同,当事故横断面离红绿灯路口较近时,司机无充分时间调整车道,会增大多车道占用情形,影响通行能力,模型计算中应考虑这一点;4.3.附件中给出了上游路口信号灯的控制方案,会影响上游来车的流量分布,如果学生能够利用附件给出上游路口信号灯配时方案和交通组织方案则更好。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2018高教社杯全国大学生数学建模竞赛题目<请先阅读“全国大学生数学建模竞赛论文格式规范”)A题城市表层土壤重金属污染分析随着城市经济的快速发展和城市人口的不断增加,人类活动对城市环境质量的影响日显突出。
对城市土壤地质环境异常的查证,以及如何应用查证获得的海量数据资料开展城市环境质量评价,研究人类活动影响下城市地质环境的演变模式,日益成为人们关注的焦点。
按照功能划分,城区一般可分为生活区、工业区、山区、主干道路区及公园绿地区等,分别记为1类区、2类区、……、5类区,不同的区域环境受人类活动影响的程度不同。
现对某城市城区土壤地质环境进行调查。
为此,将所考察的城区划分为间距1公里左右的网格子区域,按照每平方公里1个采样点对表层土<0~10 厘M深度)进行取样、编号,并用GPS记录采样点的位置。
应用专门仪器测试分析,获得了每个样本所含的多种化学元素的浓度数据。
另一方面,按照2公里的间距在那些远离人群及工业活动的自然区取样,将其作为该城区表层土壤中元素的背景值。
附件1列出了采样点的位置、海拔高度及其所属功能区等信息,附件2列出了8种主要重金属元素在采样点处的浓度,附件3列出了8种主要重金属元素的背景值。
现要求你们通过数学建模来完成以下任务:(1> 给出8种主要重金属元素在该城区的空间分布,并分析该城区内不同区域重金属的污染程度。
(2> 通过数据分析,说明重金属污染的主要原因。
(3> 分析重金属污染物的传播特征,由此建立模型,确定污染源的位置。
(4> 分析你所建立模型的优缺点,为更好地研究城市地质环境的演变模式,还应收集什么信息?有了这些信息,如何建立模型解决问题?题目A题城市表层土壤重金属污染分析摘要:本文研究的是某城区警车配置及巡逻方案的制定问题,建立了求解警车巡逻方案的模型,并在满足D1的条件下给出了巡逻效果最好的方案。
在设计整个区域配置最少巡逻车辆时,本文设计了算法1:先将道路离散化成近似均匀分布的节点,相邻两个节点之间的距离约等于一分钟巡逻路程。
由警车的数目,将全区划分成个均匀的分区,从每个分区的中心点出发,找到最近的道路节点,作为警车的初始位置,由Floyd算法算出每辆警车3分钟或2分钟行驶路程范围内的节点。
考虑区域调整的概率大小和方向不同会影响调整结果,本文利用模拟退火算法构造出迁移几率函数,用迁移方向函数决定分区的调整方向。
计算能满足D1的最小车辆数,即为该区应该配置的最小警车数目,用MATLAB 计算,得到局部最优解为13辆。
在选取巡逻显著性指标时,本文考虑了两个方面的指标:一是全面性,即所有警车走过的街道节点数占总街道节点数的比例,用两者之比来评价;二是均匀性,即所有警车经过每个节点数的次数偏离平均经过次数的程度,用方差值来大小评价。
问题三:为简化问题,假设所有警车在同一时刻,大致向同一方向巡逻,运动状态分为四种:向左,向右,向上,向下,记录每个时刻,警车经过的节点和能够赶去处理事故的点,最后汇总计算得相应的评价指标。
在考虑巡逻规律隐蔽性要求时,文本将巡逻路线进行随机处理,方向是不确定的,采用算法2进行计算,得出相应巡逻显著指标,当车辆数减少到10辆或巡逻速度变大时,用算法2计算巡逻方案和对应的参数,结果见附录所示。
本文最后还考虑到4个额外因素,给出每个影响因素的解决方案。
关键词:模拟退火算法;Floyd 算法;离散化参赛队号 11***02 队员姓名 *佳 **梅 *巍一 问题的重述 110警车在街道上巡逻,既能够对违法犯罪分子起到震慑作用,降低犯罪率,又能够增加市民的安全感,同时也加快了接处警时间,提高了反应时效,为社会和谐提供了有力的保障。
现给出某城市内一区域,其道路数据和地图数据已知,该区域内三个重点部位的坐标分别为:<5112,4806),<9126, 4266),<7434 ,1332)。
该区域内共有307个道路交叉口,为简化问题,相邻两个交叉路口之间的道路近似认为是直线,且所有事发现场均在下图的道路上。
该市拟增加一批配备有GPS 卫星定位系统及先进通讯设备的110警车。
设110警车的平均巡逻速度为20km/h ,接警后的平均行驶速度为40km/h 。
警车配置及巡逻方案要尽量满足以下要求:D1. 警车在接警后三分钟内赶到现场的比例不低于90%;而赶到重点部位的时间必须在两分钟之内。
D2. 使巡逻效果更显著;D3. 警车巡逻规律应有一定的隐蔽性。
现在我们需要解决以下几个问题:一. 若要求满足D1,该区最少需要配置多少辆警车巡逻?二. 请给出评价巡逻效果显著程度的有关指标。
三.请给出满足D1且尽量满足D2条件的警车巡逻方案及其评价指标值。
四. 在第三问的基础上,再考虑D3条件,给出你们的警车巡逻方案及其评价指标值。
五.如果该区域仅配置10辆警车,应如何制定巡逻方案,使D1、D2尽量得到满足?六. 若警车接警后的平均行驶速度提高到50km/h ,回答问题三。
七. 你们认为还有哪些因素、哪些情况需要考虑?给出你们相应的解决方案。
二 问题分析本题为城区道路网络中警车配置及巡逻问题。
在进行警车配置时,首先要考虑警参赛密码<由组委会填写)车在接警后在规定时间内赶到现场的比例,在此条件下,以车数最少为目标,建模、求解;在制定巡逻方案时,要考虑巡逻的效果及隐蔽性问题。
问题一只要求满足D1,求最少的警车配置数,可以认为警车是不动的,在三分钟或两分钟内它能到达的区域就是它的覆盖范围。
据此,在满足所有街道的覆盖率不低于90%的条件下,寻找最优解。
问题二要评价巡逻效果,有两个方面需要考虑:一是巡逻的全面性,即经过一段时间后警车走过的街道数占总街道数的比例;二是巡逻的不均匀性,即经过一段时间后警车经过每一条街道的次数相差不大,用方差来衡量。
问题三是在满足D1的条件上尽量满足问题二所给的指标,并给出评价方案的指标。
首先找到一组满足D1的各警车位置,然后在和各警车位置相连的点中随机寻找一个点,判断新的点是否满足D1,如果满足则警车行驶到该点,否则重新寻找,直到满足为止。
一段时间后统计所有车走过的点数及每个点被走过的次数,用问题二给出的两个指标进行评价。
综合两个指标,可判断此路径的好坏,重复这个过程,直到综合评价指标达到一个满意的值为止。
问题四增加了隐蔽性要求,首先给出评价隐蔽性的指标,隐蔽性可用路线的随机性来评价,将它加入到问题三的模型中去进行求解。
问题五限制警车数量为10,要综合考虑D1、D2,先分配这10辆车使道路的覆盖率最高,然后按照问题三的步骤进行求解,其中每一步对D1的判断只需使道路的覆盖率尽量高即可。
问题六同问题三,只需将车速改为50km/h即可。
三模型的假设1.警车都在路上巡逻,巡警去处理案件的时间不考虑;2.所有事发现场都在道路上,案件在道路上任一点是等概率发生的;3.警车初始停靠点是随机的,但尽量让它们分散分布,一辆警车管辖一个分区;4.假定各个划分区域内,较短时间内,最多会发生一个案件;5.假设区域内的每条道路都是双行线,不考虑转弯对结果造成的影响;6.如果重点部位不在道路上的,假设这些重点部位在离它们最近的道路上;7. 图中水域对巡逻方案没有影响。
四符号说明表示警车数目表示警车初始停靠点到各道路的最短距离表示整个区域的总道路长度表示不能在3分钟内到达的区域的道路的长度表示非重点部位的警车在3分钟内不能到达现场的比例表示三分钟内能从接警位置赶到事发现场的最大距离是表示整个区域总的离散点个数表示第区内的节点个数表示区内调整函数表示模拟退火的时间,表征温度值表示区间调整函数表示全面性指标表示不均匀性指标表示综合评价指标表示第辆车经过每条道路的次数表示整个区域每条道路经过的平均次数五模型的建立与算法的设计5.1 满足D1时,该区所需要配置的最少警车数目和巡逻方案5.1.1 满足D1条件时,区域最少警车的规律题目要求警车的配置和巡逻方案满足D1要求时,整个区域所需要配置的警车数目最少。
由假设可知警车都在道路上,且所有事发现场也都在道路上,但区域内总的道路长度是个定值的;警车在接警后赶到事发现场有时间限制和概率限制:三分钟内赶到普通区域案发现场的比例不低于90%,而赶到重点部位的时间必须控制在两分钟之内。
由此可知每辆警车的管辖范围不会很大,于是考虑将整个区域分成若干个分区,每辆警车管辖一个分区域。
由上面的分析,求解整个区域的警车数目最少这个问题可转化为求解每一辆警车所能管辖的街道范围尽量的大。
于是我们寻找出使每辆警车管辖的范围尽量大的规律。
为了简化问题,我们不考虑赶到现场的90%的几率的限制,仅对警车能在三分钟内赶到事发现场的情况作定性分析,其分析示意图如图1所示。
警车的初始停靠位置是随机的分布在道路上的任一节点上,我们假设一辆警车停靠在A点上。
图1 一辆警车管辖范围分析示意图因为警车的平均巡逻速度为20km/h,接警后的平均行驶速度为40km/h,因为距离信息比较容易得到,于是我们将时间限制转化为距离限制,这样便于分析和求解。
当警车接警后,在三分钟内能从接警位置赶到事发现场的最大距离是,其中。
如图1所示,我们设警车初始停靠位置在A点,A点是道路1,2,3,4的道路交叉口。
我们仅以警车在道路1巡逻为例来进行分析,警车以的速度在道路1上A到点之间巡逻,与初始停靠点A的距离为。
因为案件有可能在道路上任一点发生,当警车巡逻到A点时,若案发现场在道路2,3,4上发生时,警车以40km/h 的速度向事发现场行驶,警车能在三分钟内从点赶到现场的最大距离为。
如果警车在道路1上继续向前行驶,则该警车能在三分钟内赶到现场的距离继续缩小,当警车从初始点向A点行驶但没有达到点时,此时该警车的最大管辖范围比警车到达点时的最大管辖范围大。
为了使警车的管辖范围尽量大,警车的巡逻范围越小越好,当时,即警车在初始停靠点静止不动时,警车的管辖范围达到最大值。
图1所分析的是特殊的情况,道路1,2,3,4对称分布,现在我们来对一般的情况进行分析,如图2所示。
图2.1 图2.2图2 一辆警车最大管辖范围分析示意图图2.1所示的情况是道路分布不对称,与图1相比,图2.1所示的道路方向和角度都发生了改变,图2.3中的情形更为复杂。
参照对图1的分析方法,我们分析这两种情形下,警车巡逻时能在三分钟内赶到现场的最大距离的规律,我们只分析图 2.2的情况,道路1,2,3,4,5相交于点C,同时道路1与道路6也有个道路交叉口D,因为警车巡逻时是在道路上行驶的,行走的路线是分段直线,并不影响路径的长度,所以当警车巡逻到距离初始停靠点C点远处的D,此时若有案件发生时,该警车要在三分钟内能赶到现场处理案件,最大行驶距离在之内,如果警车在道路1上继续向前行驶,则该警车能在三分钟内赶到现场的距离继续缩小,当警车没有行驶到D 点时,此时该警车的最大管辖范围比大,为了使警车的管辖范围尽量大,警车的巡逻范围越小越好。