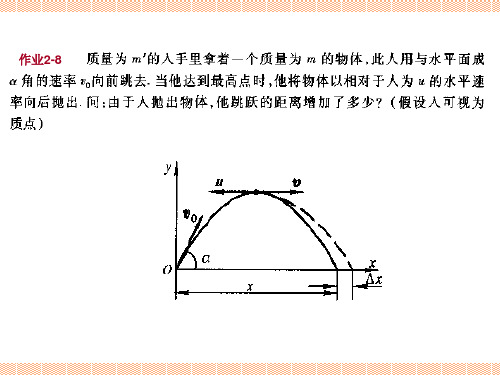
大学物理9-2旋转矢量
大学物理学第9章作业题

9-7 若简谐运动方程为()()m π25.0π20cos 10.0+=t x ,求:(1) 振幅、频率、角频率、周期和初相;(2)s 2=t 时的位移、速度和加速度.分析 可采用比较法求解.将已知的简谐运动方程与简谐运动方程的一般形式()ϕω+=t A x cos 作比较,即可求得各特征量.运用与上题相同的处理方法,写出位移、速度、加速度的表达式,代入t 值后,即可求得结果.解 (1) 将()()m π25.0π20cos 10.0+=t x 与()ϕω+=t A x cos 比较后可得:振幅A =0.10m ,角频率1s π20-=ω,初相ϕ=0.25π,则周期s 1.0/π2==ωT ,频率Hz /1T =v .(2)s 2=t 时的位移、速度、加速度分别为()m 1007.7π25.0π40cos 10.02-⨯=+=t x()-1s m 44.4π25.0π40sin π2d /d ⋅-=+-==t x v()-22222s m 1079.2π25.0π40cos π40d /d ⋅⨯-=+-==t x a9-12 一放置在水平桌面上的弹簧振子,振幅A =2.0 ×10-2 m ,周期T =0.50s.当t =0 时,(1) 物体在正方向端点;(2) 物体在平衡位置、向负方向运动;(3) 物体在x =-1.0×10-2m 处, 向负方向运动; (4) 物体在x =-1.0×10-2 m 处,向正方向运动.求以上各种情况的运动方程.分析 在振幅A 和周期T 已知的条件下,确定初相φ是求解简谐运动方程的关键.初相的确定通常有两种方法.(1) 解析法:由振动方程出发,根据初始条件,即t =0 时,x =x 0 和v =v 0 来确定φ值.(2) 旋转矢量法:如图(a )所示,将质点P 在Ox 轴上振动的初始位置x 0 和速度v 0 的方向与旋转矢量图相对应来确定φ.旋转矢量法比较直观、方便,在分析中常采用.题9-12 图解 由题给条件知A =2.0 ×10-2 m ,1s π4/2-==Tω,而初相φ可采用分析中的两种不同方法来求.解析法:根据简谐运动方程()ϕω+=t A x cos ,当0t =时有()ϕω+=t A x c o s 0,sin 0ωA -=v .当(1)A x =0时,1cos 1=ϕ,则01=ϕ;(2)00=x 时,0cos 2=ϕ,2π2±=,因00<v ,取2π2=; (3)m 100120-⨯=.x 时,50cos 3.=ϕ,3π3±= ,由00<v ,取3π3=; (4)m 100120-⨯-=.x 时,50cos 4.-=ϕ,3ππ4±= ,由00>v ,取3π44=. 旋转矢量法:分别画出四个不同初始状态的旋转矢量图,如图(b )所示,它们所对应的初相分别为01=ϕ,2π2=,3π3=,3π44=. 振幅A 、角频率ω、初相φ均确定后,则各相应状态下的运动方程为(1)()m t πcos4100.22-⨯=x (2)()()m /2πt π4cos 100.22+⨯=-x (3)()()m /3πt π4cos 100.22+⨯=-x (4)()()m /3π4t π4cos 100.22+⨯=-x9-13 有一弹簧, 当其下端挂一质量为m 的物体时, 伸长量为9.8 ×10-2 m .若使物体上、下振动,且规定向下为正方向.(1) 当t =0 时,物体在平衡位置上方8.0 ×10-2 m 处,由静止开始向下运动,求运动方程.(2) 当t =0 时,物体在平衡位置并以0.6m·s -1的速度向上运动,求运动方程.分析 求运动方程,也就是要确定振动的三个特征物理量A 、ω和φ.其中振动的角频率是由弹簧振子系统的固有性质(振子质量m 及弹簧劲度系数k )决定的,即ωk 可根据物体受力平衡时弹簧的伸长来计算;振幅A 和初相φ需要根据初始条件确定.题9-13 图解 物体受力平衡时,弹性力F 与重力P 的大小相等,即F =mg .而此时弹簧的伸长量Δl =9.8 ×10-2m .则弹簧的劲度系数k =F /Δl =mg /Δl .系统作简谐运动的角频率为1s 10-=∆==l g m k //ω(1) 设系统平衡时,物体所在处为坐标原点,向下为x 轴正向.由初始条件t =0 时,x 10 =8.0 ×10-2 m 、v 10 =0 可得振幅()m 10082210210-⨯=+=./ωv x A ;应用旋转矢量法可确定初相π1=[图(a )].则运动方程为()()m π10t cos 100.821+⨯=-x(2)t =0 时,x 20 =0、v 20 =0.6 m·s -1 ,同理可得()m 100622202202-⨯=+=./ωv x A ;2/π2=[图(b )].则运动方程为()()m π5.010t cos 100.622+⨯=-x9-14 某振动质点的x -t 曲线如图(a )所示,试求:(1) 运动方程;(2) 点P 对应的相位;(3) 到达点P 相应位置所需的时间.分析 由已知运动方程画振动曲线和由振动曲线求运动方程是振动中常见的两类问题.本题就是要通过x -t 图线确定振动的三个特征量A 、ω和0ϕ,从而写出运动方程.曲线最大幅值即为振幅A ;而ω、0ϕ通常可通过旋转矢量法或解析法解出,一般采用旋转矢量法比较方便.解 (1) 质点振动振幅A =0.10 m.而由振动曲线可画出t 0 =0 和t 1 =4 s时旋转矢量,如图(b ) 所示.由图可见初相3/π0-=(或3/π50=),而由()3201//ππω+=-t t 得1s 24/π5-=ω,则运动方程为()m 3/π24π5cos 10.0⎪⎭⎫ ⎝⎛-=t x题9-14 图(2) 图(a )中点P 的位置是质点从A /2 处运动到正向的端点处.对应的旋转矢量图如图(c ) 所示.当初相取3/π0-=时,点P 的相位为()000=-+=p p t ωϕϕ(如果初相取成3/π50=,则点P 相应的相位应表示为()π200=-+=p p t ω.(3) 由旋转矢量图可得()3/π0=-pt ω,则s 61.=p t .9-15 作简谐运动的物体,由平衡位置向x 轴正方向运动,试问经过下列路程所需的最短时间各为周期的几分之几? (1) 由平衡位置到最大位移处;(2) 由平衡位置到x =A /2 处; (3) 由x =A /2处到最大位移处.解 采用旋转矢量法求解较为方便.按题意作如图所示的旋转矢量图,平衡位置在点O .(1) 平衡位置x 1 到最大位移x 3 处,图中的旋转矢量从位置 1 转到位置3,故2/πΔ1=,则所需时间411//T t =∆=∆ωϕ(2) 从平衡位置x 1 到x 2 =A /2 处,图中旋转矢量从位置1转到位置2,故有6/πΔ2=,则所需时间1222//T t =∆=∆ωϕ(3) 从x 2 =A /2 运动到最大位移x 3 处,图中旋转矢量从位置2 转到位置3,有3/πΔ3=,则所需时间633//T t =∆=∆ωϕ题9-15 图9-25 质量为0.10kg 的物体,以振幅1.0×10-2 m 作简谐运动,其最大加速度为4.0 m·s -1 求:(1) 振动的周期;(2) 物体通过平衡位置时的总能量与动能;(3) 物体在何处其动能和势能相等? (4) 当物体的位移大小为振幅的一半时,动能、势能各占总能量的多少?分析 在简谐运动过程中,物体的最大加速度2max ωA a =,由此可确定振动的周期T .另外,在简谐运动过程中机械能是守恒的,其中动能和势能互相交替转化,其总能量E =kA 2/2.当动能与势能相等时,E k =E P =kA 2/4.因而可求解本题.解 (1) 由分析可得振动周期s 314.0/π2/π2max ===a A ωT(2) 当物体处于平衡位置时,系统的势能为零,由机械能守恒可得系统的动能等于总能量,即J100221213max 22k -⨯====.mAa mA E E ω(3) 设振子在位移x 0 处动能与势能相等,则有42220//kA kx =得 m 100772230-⨯±=±=./A x(4) 物体位移的大小为振幅的一半(即2x A =/)时的势能为4221212P /E A k kx E =⎪⎭⎫ ⎝⎛== 则动能为 43P K /E E E E =-=9-27 质量m =10g 的小球与轻弹簧组成一振动系统, 按()()cm 3/ππ85.0+=t x 的规律作自由振动,求(1) 振动的角频率、周期、振幅和初相;(2) 振动的能量E ;(3) 一个周期内的平均动能和平均势能.解 (1) 将()()cm 3/ππ85.0+=t x 与()ϕω+=t A x cos 比较后可得:角频率1s π8-=ω,振幅A =0.5cm ,初相φ=π/3,则周期T =2π/ω=0.25 s(2) 简谐运动的能量 J 1090721522-⨯==.ωmA E (3) 简谐运动的动能和势能分别为()ϕωω+=t mA E K 222sin 21 ()ϕωω+=t mA E P 222cos 21 则在一个周期中,动能与势能对时间的平均值分别为()J 109534d sin 2115220222-⨯==+=⎰.ωϕωωmA t t mA T E T K ()J 109534d cos 2115220222-⨯==+=⎰.ωϕωωmA t t mA T E T P9-30 两个同频率的简谐运动1 和2 的振动曲线如图(a )所示,求(1)两简谐运动的运动方程x 1 和x 2;(2) 在同一图中画出两简谐运动的旋转矢量,并比较两振动的相位关系;(3) 若两简谐运动叠加,求合振动的运动方程.分析 振动图已给出了两个简谐运动的振幅和周期,因此只要利用图中所给初始条件,由旋转矢量法或解析法求出初相位,便可得两个简谐运动的方程.解 (1) 由振动曲线可知,A =0.1 m,T =2s,则ω=2π/T =πs-1 .曲线1表示质点初始时刻在x =0 处且向x 轴正向运动,因此φ1 =-π/2;曲线2 表示质点初始时刻在x =A /2 处且向x 轴负向运动,因此φ2 =π/3.它们的旋转矢量图如图(b )所示.则两振动的运动方程分别为()()m 2/ππcos 1.01-=t x 和 ()()m 3/ππcos 1.02+=t x(2) 由图(b )可知振动2超前振动1 的相位为5π/6.(3)()ϕω+'=+=t A x x x cos 21其中()m 0520cos 212212221.=-++='ϕϕA A A A A()120.268arctan cos cos sin sin arctan 22112211πϕϕϕϕϕ-=-=++=A A A A则合振动的运动方程为 ()()m π/12πcos 052.0-=t x题9-30 图9-31 将频率为348 Hz 的标准音叉振动和一待测频率的音叉振动合成,测得拍频为3.0Hz .若在待测频率音叉的一端加上一小块物体,则拍频数将减少,求待测音叉的固有频率.分析 这是利用拍现象来测定振动频率的一种方法.在频率υ1 和拍频数Δυ=|υ2 -υ1|已知的情况下,待测频率υ2 可取两个值,即υ2 =υ1 ±Δυ.式中Δυ前正、负号的选取应根据待测音叉系统质量改变时,拍频数变化的情况来决定.解 根据分析可知,待测频率的可能值为υ2 =υ1 ±Δυ =(348 ±3) Hz 因振动系统的固有频率mk π21=v ,即质量m 增加时,频率υ 减小.从题意知,当待测音叉质量增加时拍频减少,即|υ2 -υ1|变小.因此,在满足υ2 与Δυ 均变小的情况下,式中只能取正号,故待测频率为υ2 =υ1 +Δυ=351 Hz9-10 如图(a )所示,两个轻弹簧的劲度系数分别为1k 、2k .当物体在光滑斜面上振动时.(1) 证明其运动仍是简谐运动;(2) 求系统的振动频率.题9-10 图分析 从上两题的求解知道,要证明一个系统作简谐运动,首先要分析受力情况,然后看是否满足简谐运动的受力特征(或简谐运动微分方程).为此,建立如图(b )所示的坐标.设系统平衡时物体所在位置为坐标原点O ,Ox 轴正向沿斜面向下,由受力分析可知,沿Ox 轴,物体受弹性力及重力分力的作用,其中弹性力是变力.利用串联时各弹簧受力相等,分析物体在任一位置时受力与位移的关系,即可证得物体作简谐运动,并可求出频率υ.证 设物体平衡时两弹簧伸长分别为1x 、2x ,则由物体受力平衡,有2211sin x k x k mg ==θ (1)按图(b )所取坐标,物体沿x 轴移动位移x 时,两弹簧又分别被拉伸1x '和2x ',即21x x x '+'=.则物体受力为 ()()111222sin sin x x k mg x x k mg F '+-='+-=θθ (2)将式(1)代入式(2)得1122x k x k F '-='-=(3) 由式(3)得11k F x /-='、22k F x /-=',而21x x x '+'=,则得到 ()[]kx x k k k k F -=+-=2121/式中()2121k k k k k +=/为常数,则物体作简谐运动,振动频率 ()m k k k k πm k ωv 2121/21/π21π2/+=== 讨论 (1) 由本题的求证可知,斜面倾角θ 对弹簧是否作简谐运动以及振动的频率均不产生影响.事实上,无论弹簧水平放置、斜置还是竖直悬挂,物体均作简谐运动.而且可以证明它们的频率相同,均由弹簧振子的固有性质决定,这就是称为固有频率的原因.(2) 如果振动系统如图(c )(弹簧并联)或如图(d )所示,也可通过物体在某一位置的受力分析得出其作简谐运动,且振动频率均为()m k k v /π2121+=,读者可以一试.通过这些例子可以知道,证明物体是否作简谐运动的思路是相同的.9-18 图(a )为一简谐运动质点的速度与时间的关系曲线,且振幅为2cm ,求(1) 振动周期;(2) 加速度的最大值;(3) 运动方程.分析 根据v -t 图可知速度的最大值v max ,由v max =Aω可求出角频率ω,进而可求出周期T 和加速度的最大值a max =Aω2 .在要求的简谐运动方程x =A cos (ωt +φ)中,因为A 和ω已得出,故只要求初相位φ即可.由v -t 曲线图可以知道,当t =0 时,质点运动速度v 0 =v max /2 =Aω/2,之后速度越来越大,因此可以判断出质点沿x 轴正向向着平衡点运动.利用v 0 =-Aωsinφ就可求出φ.解 (1) 由ωA v =max 得1s 51-=.ω,则s 2.4/π2==ωT(2)222max s m 1054--⋅⨯==.ωA a(3) 从分析中已知2/sin 0ωA ωA =-=v ,即21sin /-=ϕ6/π5,6/π--=因为质点沿x 轴正向向平衡位置运动,则取6/π5-=,其旋转矢量图如图(b )所示.则运动方程为 ()()cm 6/π55.1cos 2-=t x题9-18 图9-21 一飞轮质量为12kg ,内缘半径r =0.6m,如图所示.为了测定其对质心轴的转动惯量,现让其绕内缘刃口摆动,在摆角较小时,测得周期为2.0s ,试求其绕质心轴的转动惯量.9-21 题图分析 飞轮的运动相当于一个以刃口为转轴的复摆运动,复摆振动周期为c /π2mg l J T =,因此,只要知道复摆振动的周期和转轴到质心的距离c l ,其以刃口为转轴的转动惯量即可求得.再根据平行轴定理,可求出其绕质心轴的转动惯量.解 由复摆振动周期c /π2mgl J T =,可得22π4/mgrT J =.则由平行轴定理得222220m kg 8324⋅=-=-=./mr mgrT mr J J π9-22 如图(a )所示,质量为1.0 ×10-2kg 的子弹,以500m·s -1的速度射入木块,并嵌在木块中,同时使弹簧压缩从而作简谐运动,设木块的质量为4.99 kg ,弹簧的劲度系数为8.0 ×103 N·m -1 ,若以弹簧原长时物体所在处为坐标原点,向左为x 轴正向,求简谐运动方程.题9-22 图分析 可分为两个过程讨论.首先是子弹射入木块的过程,在此过程中,子弹和木块组成的系统满足动量守恒,因而可以确定它们共同运动的初速度v 0 ,即振动的初速度.随后的过程是以子弹和木块为弹簧振子作简谐运动.它的角频率由振子质量m 1 +m 2 和弹簧的劲度系数k 确定,振幅和初相可根据初始条件(初速度v 0 和初位移x 0 )求得.初相位仍可用旋转矢量法求.解 振动系统的角频率为 ()121s 40-=+=m m k /ω由动量守恒定律得振动的初始速度即子弹和木块的共同运动初速度v 0 为()12110s m 01-⋅=+=.m m v m v又因初始位移x 0 =0,则振动系统的振幅为 ()m 105.2//202020-⨯==+=ωωx A v v图(b )给出了弹簧振子的旋转矢量图,从图中可知初相位2/π0=,则简谐运动方程为()()m π0.540cos 105.22+⨯=-t x。
《大学物理学》机械振动练习题

《大学物理学》机械振动自主学习材料一、选择题9-1.一个质点作简谐运动,振幅为A ,在起始时质点的位移为2A -,且向x 轴正方向运动,代表此简谐运动的旋转矢量为( )【旋转矢量转法判断初相位的方法必须掌握】9-2.已知某简谐运动的振动曲线如图所示,则此简谐运动的运动方程(x 的单位为cm ,t 的单位为s )为( )(A )222cos()33x t ππ=-;(B )222cos()33x t ππ=+;(C )422cos()33x t ππ=-;(D )422cos()33x t ππ=+。
【考虑在1秒时间内旋转矢量转过3ππ+,有43πω=】9-3.两个同周期简谐运动的振动曲线如图所示,1x 的相位比2x 的相位( )(A )落后2π; (B )超前2π; (C )落后π; (D )超前π。
【显然1x 的振动曲线在2x 曲线的前面,超前了1/4周期,即超前/2π】9-4.当质点以频率ν作简谐运动时,它的动能变化的频率为( ) (A )2ν; (B )ν; (C )2ν; (D )4ν。
【考虑到动能的表达式为22211sin ()22kE mv kA t ωϕ==+,出现平方项】9-5.图中是两个简谐振动的曲线,若这两个简谐振动可叠加,则合成的余弦振动的初相位为( )(A )32π; (B )2π; (C )π; (D )0。
【由图可见,两个简谐振动同频率,相位相差π,所以,则合成的余弦振动的振幅应该是大减小,初相位是大的那一个】9--1.一物体悬挂在一质量可忽略的弹簧下端,使物体略有位移, 测得其振动周期为T ,然后将弹簧分割为两半,并联地悬挂同 一物体,再使物体略有位移,测得其振动周期为'T ,则()A ()B()C()D )s--'/T T 为( )(A )2; (B )1; (C; (D )12。
【弹簧串联的弹性系数公式为12111k k k =+串,弹簧对半分割后,其中一根的弹性系数为2k ,两弹簧并联后形成新的弹簧整体,弹性系数为4k ,公式为12k k k =+并,利用ω=2T πω=,所以,'22T T π==】9--2.一弹簧振子作简谐运动,当位移为振幅的一半时,其动能为总能量的( ) (A )12;(B;(C)2;(D )34。
旋转矢量表示法B版

1 2
⎞ ⎟ ⎠
−
π⎤
3
⎥ ⎦
=
2 π
⎡ 2π ⎢⎣ 3
−
π⎤ 3 ⎥⎦
=
2 3
=
0.667(s)
四、相图(phase diagram)
利用相图描述非线性动力学的方 法是19世纪末法国数学家亨利·庞加 莱(H.Poincare)发明的.
现以坐标和速度为坐标轴定义一 个平面, 称为相平面. 系统的一个运 动状态对应于相平面上的一个点, 称 为相点. 当系统的运动状态发生变化 时, 相点在相平面内运动, 相点的轨 迹则称为相图.
A 端投影:
x = A cos(ωt + ϕ )
与简谐运动方程完全相同, 所以投影点的运动为简谐运动.
二、初相位
ϕ = π平衡位置 2
旋转矢量表示法
π <ϕ <π 2
ϕ
ϕ=π
负向最大
π 0<ϕ<
2
x ϕ=0
正向最大
π < ϕ < 3π 2
3π < ϕ < 2π 2
ϕ = 3π 平衡位置 2
初相位讨论
大学物理
振动学基础
第3讲 旋转矢量表示法
旋转矢量表示法
旋转矢量表示法
一、旋转矢量表示法(参考圆法)
是研究简谐运动规律时所采用的直观的几何描述方法.
自 Ox 轴原点作矢量 A , 其模等 于振幅. A 绕 O点逆时针旋转, 角 速度为ω (其数值即为简谐运动的 角频率) , 则 A 称为旋转振幅矢量. 设初始时刻 t = 0 时 A 与 x 轴夹角 等于初相位 ϕ , 经过时间 t , A 与 x 轴夹角等于相位ω t +ϕ .
《大学物理》下册(第五版)课后答案

第九章振动9-1一个质点作简谐运动,振幅为A,在起始时刻质点的位移为-A,且向x 轴正方向运2动,代表此简谐运动的旋转矢量为()题9-1图分析与解(b)图中旋转矢量的矢端在x 轴上投影点的位移为-A/2,且投影点的运动方向指向O x轴正向,即其速度的x 分量大于零,故满足题意.因而正确答案为(b).9-2已知某简谐运动的振动曲线如图(a)所示,则此简谐运动的运动方程为()(A)x = 2cos⎡2πt -2 π⎤(cm)(C)x = 2cos⎡2 πt +2 π⎤(cm)⎢⎣3 3 ⎥⎦ ⎢⎣3 3 ⎥⎦(B)x = 2cos⎡4πt -2 π⎤(cm)(D)x = 2cos⎡4 πt +2 π⎤(cm)⎢⎣3 3 ⎥⎦ ⎢⎣3 3 ⎥⎦题9-2图分析与解由振动曲线可知,初始时刻质点的位移为–A/2,且向x 轴负方向运动.图(b)是其相应的旋转矢量图,由旋转矢量法可知初相位为2π / 3 .振动曲线上给出质点从–A/2 处运动到+A 处所需时间为 1 s,由对应旋转矢量图可知相应的相位差∆ϕ=4π3 ,则角频率ω=∆ϕ/ ∆t =(4π/ 3)s-1 ,故选(D).本题也可根据振动曲线所给信息,逐一代入方程来找出正确答案.9-3两个同周期简谐运动曲线如图(a)所示,x1 的相位比x2 的相位()(A)落后π2(B)超前π2(C)落后π(D)超前π分析与解由振动曲线图作出相应的旋转矢量图(b)即可得到答案为(b).题9-3图9-4当质点以频率ν作简谐运动时,它的动能的变化频率为()(A)v(B)v (C)2v2(D)4v分析与解质点作简谐运动的动能表式为E k=1mω2 A 2sin2 (ωt2+ϕ),可见其周期为简谐运动周期的一半,则频率为简谐运动频率ν 的两倍.因而正确答案为(C).9-5图(a)中所画的是两个简谐运动的曲线,若这两个简谐运动可叠加,则合成的余弦振动的初相位为()3(A)π21(B)π2(C)π(D)0分析与解由振动曲线可以知道,这是两个同振动方向、同频率简谐运动,它们的相位差是π(即反相位).运动方程分别为x1=A cosωt 和x2=Acos(ωt +π).它们的振幅不同.对2于这样两个简谐运动,可用旋转矢量法,如图(b)很方便求得合运动方程为x1 =而正确答案为(D).Acosωt .因2题9-5图9-6 有一个弹簧振子,振幅A = 2.0 ⨯10-2 m ,周期T = 1.0 s ,初相ϕ出它的运动方程,并作出x -t 图、v -t 图和a -t 图.=3π / 4 .试写题9-6 图分析弹簧振子的振动是简谐运动.振幅 A 、初相ϕ、角频率ω是简谐运动方程m / k 外, ω 可通过关系式ω = 2π / T 确定.振子运动的速度和加速度的计算仍与质点运动学中的计算方法相同.解 因ω = 2π / T ,则运动方程x = A cos (ωt + ϕ ) = A ⎛ 2πt + ϕ ⎫cos ⎪ ⎝ T⎭根据题中给出的数据得x = 2.0 ⨯ 10-2 cos (2πt + 0.75π ) (m )振子的速度和加速度分别为v = d x / d y a = d 2x / d 2y = -4π ⨯ 10-2sin (2πt = -8π ⨯ 10-2cos (2πt + 0.75π) ( m ⋅ s-1 )+ 0.75π) ( m ⋅ s -1)x - t 、 v - t 及 a - t 图如图所示.9-7 若简谐运动方程为 x = 0.10 cos (20πt + 0.25π)(m ),求:(1) 振幅、频率、角频率、周期和初相;(2) t = 2s 时的位移、速度和加速度.分析 可采用比较法求解.将已知的简谐运动方程与简谐运动方程的一般形式x = A cos (ωt + ϕ )作比较,即可求得各特征量.运用与上题相同的处理方法,写出位移、速度、加速度的表达式,代入t 值后,即可求得结果.解 (1) 将 x = 0.10 cos (20πt + 0.25π)(m )与 x = A cos (ωt + ϕ )比较后可得:振幅 A = 0.10m ,角频率ω = 20π s -1,初相ϕ =0.25 π ,则周期T = 2π / ω = 0.1 s ,频率 v = 1/ T Hz .(2) t = 2s 时的位移、速度、加速度分别为x = 0.10 cos (40πt + 0.25π) = 7.07 ⨯10-2 mv = d x / d t = -2πsin (40π + 0.25π) = -4.44m ⋅ s -1a = d 2 x / d 2t = -40π2cos (40π + 0.25π) = -2.79 ⨯102 m ⋅ s -29-8 一远洋货轮,质量为 m ,浮在水面时其水平截面积为 S .设在水面附近货轮的水平截面积近似相等,水的密度为 ρ,且不计水的粘滞阻力,证明货轮在水中作振幅较小的竖直自由运动是简谐运动,并求振动周期.分析 要证明货轮作简谐运动,需要分析货轮在平衡位置附近上下运动时,它所受的合外力 F 与位移 x 间的关系,如果满足 F = -kx ,则货轮作简谐运动.通过 F = -kx 即可求得振动 周期T = 2π / ω = 2π .证 货轮处于平衡状态时[图(a )],浮力大小为 F =mg .当船上下作微小振动时,取货轮处于力平衡时的质心位置为坐标原点 O ,竖直向下为 x 轴正向,如图(b )所示.则当货轮向下偏移 x 位移时,受合外力为∑ F = P + F '其中 F ' 为此时货轮所受浮力,其方向向上,大小为F ' = F + ρgSx = mg + ρgSx则货轮所受合外力为题9-8图∑F=P -F '=-ρgSx =-kx式中k =ρgS 是一常数.这表明货轮在其平衡位置上下所作的微小振动是简谐运动.由∑F =m d2 x / d2t 可得货轮运动的微分方程为d2 x / d2t +ρgSx / m = 0令ω2 =ρgS / m ,可得其振动周期为T =2π / ω = 2π9-9设地球是一个半径为R 的均匀球体,密度ρ= 5.5 ⨯103 kg ⋅ m-3 .现假定沿直径凿通一条隧道,若有一质量为m 的质点在此隧道内作无摩擦运动.(1)证明此质点的运动是简谐运动;(2)计算其周期.题9-9图分析证明方法与上题相似.分析质点在隧道内运动时的受力特征即可.证(1)取图所示坐标.当质量为m 的质点位于x 处时,它受地球的引力为m / ρgSm / k x xF = -Gm x m式中G 为引力常量, m 是以 x 为半径的球体质量,即 m = 4πρx 3/ 3 .令 k = 4πρGm / 3 ,则质点受力F = 4πρGmx / 3 = -kx因此,质点作简谐运动.(2) 质点振动的周期为T = 2π = = 5.07 ⨯103 s9-10 如图(a )所示,两个轻弹簧的劲度系数分别为 k 1 、k 2时.(1) 证明其运动仍是简谐运动;(2) 求系统的振动频率..当物体在光滑斜面上振动题 9-10 图分析 从上两题的求解知道,要证明一个系统作简谐运动,首先要分析受力情况,然后看是否满足简谐运动的受力特征(或简谐运动微分方程).为此,建立如图(b )所示的坐标.设系统平衡时物体所在位置为坐标原点 O ,Ox 轴正向沿斜面向下,由受力分析可知,沿 Ox 轴, 物体受弹性力及重力分力的作用,其中弹性力是变力.利用串联时各弹簧受力相等,分析物体 在任一位置时受力与位移的关系,即可证得物体作简谐运动,并可求出频率υ .证 设物体平衡时两弹簧伸长分别为 x 1 、 x 2 ,则由物体受力平衡,有mg sin θ = k 1x 1 = k 2 x 2按图(b )所取坐标,物体沿 x 轴移动位移 x 时,两弹簧又分别被拉伸 x 1' 和 x 2' ,即物体受力为(1)x = x 1' + x 2' .则 3π / Gρ1 2π(k + k )/ m 1 21 2F = mg si n θ - k 2 (x 2 + x 2' )= mg si n θ - k 1 (x 1 + x 1') 将式(1)代入式(2)得(2) F = -k 2 x 2' = -k 1x 1' 由式(3)得 x 1' = -F / k 1 、 x 2' = -F / k 2 ,而 x = x 1' + x 2' ,则得到(3)F = -[k k / (k + k )]x = -kx 1 2式中 k = k 1k 2 / (k 1 + k 2 )为常数,则物体作简谐运动,振动频率v = ω / 2π = 12π k / m = 讨论 (1) 由本题的求证可知,斜面倾角 θ 对弹簧是否作简谐运动以及振动的频率均不产生影响.事实上,无论弹簧水平放置、斜置还是竖直悬挂,物体均作简谐运动.而且可以证明它们的频率相同,均由弹簧振子的固有性质决定,这就是称为固有频率的原因.(2) 如果振动系统如图(c )(弹簧并联)或如图(d )所示,也可通过物体在某一位置的受力分析得出其 作简谐运动,且振动频率均为v = ,读者可以一试.通过这些例子可以知道,证明物体是否作简谐运动的思路是相同的.*9-11 在如图(a )所示装置中,一劲度系数为 k 的轻弹簧,一端固定在墙上,另一端连接一质量为 m 1 的物体 A ,置于光滑水平桌面上.现通过一质量 m 、半径为 R 的定滑轮 B (可视为匀质圆盘)用细绳连接另一质量为 m 2 的物体 C .设细绳不可伸长,且与滑轮间无相对滑动, 求系统的振动角频率.题 9-11 图分析 这是一个由弹簧、物体 A 、C 和滑轮 B 组成的简谐运动系统.求解系统的振动频率可采用两种方法.(1) 从受力分析着手.如图(b )所示,设系统处于平衡状态时,与物体1 2πk k /(k + k )m1 2 1 2k 正向从原点 O 伸长 x 时,分析物体 A 、C 及滑轮 B 的受力情况,并分别列出它们的动力学方程,可解得系统作简谐运动的微分方程.(2)从系统机械能守恒着手.列出系统机械能守恒方 程,然后求得系统作简谐运动的微分方程.解 1 在图(b )的状态下,各物体受力如图(c )所示.其中 F = -k (x + x 0 )i .考虑到绳 子不可伸长,对物体 A 、B 、C 分别列方程,有F T 1 = -k (x + x 0 ) = d 2 x m 1 d t 2 d 2 x(1)m 2 g - F T 2 = m 2 d t2 (2)( - ) = α = 1d 2 xF T 2 F T 1 R J2 mR d t 2(3) kx 0 = m 2 g (4)方程(3)中用到了 F = F ' 、F = F ' 、J = mR 2/ 2 及α = a / R .联立式(1) ~式(4)T 2 T 2 可得T 1 T 1d 2 x k则系统振动的角频率为d t2+m 1 + m 2 + m / 2x = 0(5)ω = 解 2 取整个振动装置和地球为研究系统,因没有外力和非保守内力作功,系统机械能守恒.设物体平衡时为初始状态,物体向右偏移距离 x (此时速度为 v 、加速度为 a )为末状态, 则由机械能守恒定律,有E = -m gx + 1 m v 2 + 1 m v 2 + 1 J ω2 + 1 k (x + x )20 2 2 1 2 2 2 2在列出上述方程时应注意势能(重力势能和弹性势能)零点的选取.为运算方便,选初始状态下物体 C 所在位置为重力势能零点;弹簧原长时为弹性势能的零点.将上述方程对时间求导得0 = -m gv + m v d v + m v d v + Jω d ω + k (x + x )d x2 1 d t 2 d t d t 0d t 将 J = mR 2 / 2 , ωR = v , d v / d t = d 2 x / d t 2和m g = kx 代入上式,可得d 2x + d t 2 m2 0+ m + m / 2 x = 0(6)12式(6)与式(5)相同,表明两种解法结果一致.9-12 一放置在水平桌面上的弹簧振子,振幅 A =2.0 ×10-2 m ,周期 T =0.50s.当 t =0 时,(1) 物体在正方向端点;(2) 物体在平衡位置、向负方向运动;(3) 物体在 x =-1.0×10-2m 处, 向负方向运动; (4) 物体在 x =-1.0×10-2 m 处,向正方向运动.求以上各种情况的运动方程.分析 在振幅 A 和周期 T 已知的条件下,确定初相 φ 是求解简谐运动方程的关键.初相k / (m 1 + m 2 + m / 2)π π = 4π 的确定通常有两种方法.(1) 解析法:由振动方程出发,根据初始条件,即 t =0 时,x =x 0 和 v =v 0 来确定 φ 值.(2) 旋转矢量法:如图(a )所示,将质点 P 在 Ox 轴上振动的初始位置 x 0 和速度 v 0 的方向与旋转矢量图相对应来确定 φ.旋转矢量法比较直观、方便,在分析中常采用.题 9-12 图解 由题给条件知 A =2.0 ×10-2 m , ω = 2 / T = 4π s -1,而初相 φ 可采用分析中的两种不 同方法来求.解析法 : 根据简 谐 运动方 程 x = A cos (ωt + ϕ ) ,当 t = 0 时有 x 0 = A cos (ωt + ϕ ) ,v 0 = - Aωsin .当(1) x 0 = A 时, cos ϕ1 = 1,则ϕ1 = 0 ;π π(2) x 0 = 0 时, cos ϕ2 = 0 ,ϕ2 = ± ,因v 0 < 0 ,取ϕ2 = ;2 2(3) x 0 = 1.0 ⨯10-2 m 时, cos ϕ = 0.5 ,ϕ3 = ± π 3 ,由v 0 < 0 ,取ϕ3 = ; 3(4) x = -1.0 ⨯10-2m 时, cos ϕ = -0.5 ,ϕ = π ± ,由v > 0 ,取ϕ 4π 0 4 4 3 0 4 3旋转矢量法:分别画出四个不同初始状态的旋转矢量图,如图(b )所示,它们所对应的初 相分别为ϕ1 = 0 , ϕ2 =, ϕ3 =2, ϕ4 =.33振幅 A 、角频率 ω、初相 φ 均确定后,则各相应状态下的运动方程为(1) x = 2.0 ⨯10-2cos4πt(m )(2) x = 2.0 ⨯10-2 cos (4πt + π/2) (m ) (3) x = 2.0 ⨯10-2 cos (4πt + π/3) (m ) (4) x = 2.0 ⨯10-2 cos (4πt + 4π/3) (m )9-13 有一弹簧, 当其下端挂一质量为 m 的物体时, 伸长量为 9.8 ×10-2 m .若使物体上、下振动,且规定向下为正方向.(1) 当 t =0 时,物体在平衡位置上方 8.0 ×10-2 m 处,由静止开始向下运动,求运动方程.(2) 当 t =0 时,物体在平衡位置并以 0.6m·s -1 的速度向上运动,求运动方程.π π 3.k / m g / ∆l x + ( 21010 v / ω )2⎝ 12 ⎭分析 求运动方程,也就是要确定振动的三个特征物理量 A 、ω 和 φ.其中振动的角频率是 由弹簧振子系统的固有性质(振子质量 m 及弹簧劲度系数 k )决定的,即ω =k /m ,k 可根据物体受力平衡时弹簧的伸长来计算;振幅 A 和初相 φ 需要根据初始条件确定.题 9-13 图解 物体受力平衡时,弹性力 F 与重力 P 的大小相等,即 F =mg .而此时弹簧的伸长量 Δl =9.8 ×10-2m .则弹簧的劲度系数 k =F /Δl =mg /Δl .系统作简谐运动的角频率为ω = = = 10 s -1(1) 设系统平衡时,物体所在处为坐标原点,向下为 x 轴正向.由初始条件 t =0 时, x 10 =8.0 ×10-2 m 、v 10 =0 可得振幅 A = = 8.0 ⨯10- 2m ;应用旋转矢量法可确定初相ϕ1 = π [图(a )].则运动方程为x = 8.0 ⨯10-2cos (10t + π) (m ) (2)t =0 时,x 20 =0、v 20 =0.6 m·s -1 ,同理可得 A 2 == 6.0 ⨯10- 2 m ; ϕ2 = π / 2 [图(b )].则运动方程为x = 6.0 ⨯10-2cos (10t + 0.5π) (m ) 9-14 某振动质点的 x -t 曲线如图(a )所示,试求:(1) 运动方程;(2) 点 P 对应的相位;(3) 到达点 P 相应位置所需的时间.分析 由已知运动方程画振动曲线和由振动曲线求运动方程是振动中常见的两类问题.本题就是要通过 x -t 图线确定振动的三个特征量 A 、ω 和ϕ0 ,从而写出运动方程.曲线最大幅值即为振幅 A ;而 ω、ϕ0 通常可通过旋转矢量法或解析法解出,一般采用旋转矢量法比较方便. 解 (1) 质点振动振幅 A =0.10 m.而由振动曲线可画出 t 0 =0 和 t 1 =4 s时旋转矢 量,如图( b ) 所 示.由图可见初相 ϕ0 = -π / 3 (或 ϕ0 = 5π / 3 ), 而由 ω(t 1 - t 0 ) = π / 2 + π / 3 得ω = 5π / 24 s ,则运动方程为 -1x = 0.10 cos⎛ 5πt - π / 3⎫(m )24⎪ x + ( 220 20 v / ω)2ppp p题9-14 图(2)图(a)中点P 的位置是质点从A/2 处运动到正向的端点处.对应的旋转矢量图如图(c)所示.当初相取ϕ0 =-π / 3 时,点P 的相位为ϕp =ϕ0 +ω(t - 0)= 0 (如果初相取成=5π / 3 ,则点P 相应的相位应表示为ϕp =ϕ0 +ω(t -0)=2π .(3)由旋转矢量图可得ω(t - 0)=π/ 3 ,则t =1.6 s .9-15作简谐运动的物体,由平衡位置向x 轴正方向运动,试问经过下列路程所需的最短时间各为周期的几分之几?(1)由平衡位置到最大位移处;(2)由平衡位置到x =A/2 处;(3)由x =A/2 处到最大位移处.解采用旋转矢量法求解较为方便.按题意作如图所示的旋转矢量图,平衡位置在点O.(1))平衡位置x1到最大位移x3处,图中的旋转矢量从位置 1 转到位置 3 ,故∆ϕ1=π / 2 ,则所需时间∆t1=∆ϕ1 / ω=T / 4(2)从平衡位置x1到x2=A/2 处,图中旋转矢量从位置1 转到位置2,故有∆ϕ2则所需时间=π / 6 ,∆t2=∆ϕ2 / ω=T / 12(3)从x2=A/2 运动到最大位移x3处,图中旋转矢量从位置 2 转到位置3,有∆ϕ0=π / 3 ,则所需时间∆t3=∆ϕ3 / ω=T / 6N 题 9-15 图9-16 在一块平板下装有弹簧,平板上放一质量为 1.0 kg 的重物.现使平板沿竖直方向作上下简谐运动,周期为 0.50s,振幅为 2.0×10-2 m .求:(1) 平板到最低点时,重物对平板的作用力;(2) 若频率不变,则平板以多大的振幅振动时,重物会跳离平板? (3) 若振幅不变,则平板以多大的频率振动时, 重物会跳离平板?题 9-16 图分析 按题意作示意图如图所示.物体在平衡位置附近随板作简谐运动,其间受重力 P 和板支持力 F N 作用,F N 是一个变力.按牛顿定律,有d 2 y F = mg - F N = m d t 2(1)由于物体是随板一起作简谐运动,因而有a 改写为 = d 2y d t 2 = -A ω 2 cos (ωt + ϕ ) ,则式(1)可 F N = mg + mA ω 2cos (ωt + ϕ ) (2)(1) 根据板运动的位置,确定此刻振动的相位ωt + ϕ ,由式(2)可求板与物体之间的作 用力.(2) 由式(2)可知支持力 F N 的值与振幅 A 、角频率 ω 和相位( ωt + ϕ )有关.在振 动过程中,当ωt + ϕ = π 时 F N 最小.而重物恰好跳离平板的条件为 F N =0,因此由式(2)可 分别求出重物跳离平板所需的频率或振幅.解 (1) 由分析可知,重物在最低点时,相位ωt + ϕ =0,物体受板的支持力为F = mg + mA ω 2 = mg + mA (2π / t)2 = 12.96 N 重物对木块的作用力 F N ' 与 F N 大小相等,方向相反. (2) 当频率不变时,设振幅变为 A ′.根据分析中所述,将 F N =0 及ωt + ϕ 分析中式(2),可得= π 代入max max2A ' = mg / mω2 = gT 2 / 4π2 = 6.2 ⨯10-2 m(3) 当振幅不变时,设频率变为v ' .同样将 F N =0 及ωt + ϕ 可得= π 代入分析中式(2), v ' = ω = 2π = 3.52 Hz 9-17 两 质点作同 频率、同 振幅的简 谐运动. 第一个质 点的运动 方程 为x 1 = A cos (ωt + ϕ ),当第一个质点自振动正方向回到平衡位置时,第二个质点恰在振动正方 向的端点,试用旋转矢量图表示它们,并求第二个质点的运动方程及它们的相位差.题 9-17 图解 图示为两质点在时刻 t 的旋转矢量图,可见第一个质点 M 的相位比第二个质点 N 的相位超前π / 2 ,即它们的相位差 Δφ=π/2.故第二个质点的运动方程应为x 2 = A cos (ωt + ϕ - π / 2)9-18 图(a )为一简谐运动质点的速度与时间的关系曲线,且振幅为 2cm ,求(1) 振动周期;(2) 加速度的最大值;(3) 运动方程.分析 根据 v -t 图可知速度的最大值 v max ,由 v max =Aω 可求出角频率 ω,进而可求出周期 T 和加速度的最大值 a max =Aω2 .在要求的简谐运动方程 x =A cos (ωt +φ)中,因为 A 和 ω 已得出,故只要求初相位 φ 即可.由 v -t 曲线图可以知道,当 t =0 时,质点运动速度v 0 =v max /2 =Aω/2,之后速度越来越大,因此可以判断出质点沿 x 轴正向向着平衡点运动.利用 v 0 =-Aωsinφ 就可求出 φ.解 (1) 由v = A ω 得ω =1.5 s -1 ,则 T = 2π / ω = 4.2 s (2) a = A ω 2 = 4.5 ⨯10-2 m ⋅ s -2 (3) 从分析中已知 v 0 = - Aωsin= Aω / 2 ,即 sin ϕ = -1 / 2= -π / 6,-5π / 6因为质点沿 x 轴正向向平衡位置运动,则取 = -5π / 6 ,其旋转矢量图如图(b )所示.则运动 方程为 x = 2cos (1.5t - 5π / 6) (cm )1 mg / m A 2πg / l g / l max题 9-18 图9-19 有一单摆,长为 1.0m ,最大摆角为 5°,如图所示.(1) 求摆的角频率和周期;(2)设开始时摆角最大,试写出此单摆的运动方程;(3) 摆角为 3°时的角速度和摆球的线速度各为多少?题 9-19 图分析 单摆在摆角较小时(θ<5°)的摆动,其角量 θ 与时间的关系可表示为简谐运动方程 θ = θmax co s (ωt + ϕ ) ,其中角频率 ω 仍由该系统的性质(重力加速度 g 和绳长 l )决定,即 ω = .初相 φ 与摆角 θ,质点的角速度与旋转矢量的角速度(角频率)均是不同的物理 概念,必须注意区分.解 (1) 单摆角频率及周期分别为ω = = 3.13 s -1; T = 2π / ω = 2.01 s(2) 由t = 0 时θ = θ = 5o可得振动初相ϕ = 0 ,则以角量表示的简谐运动方程为 θ = π cos3.13t 36(3) 摆角为 3°时,有cos (ωt + ϕ ) = θ / θmax = 0.6 ,则这时质点的角速度为J / mgl c maxE c M线速度的大小为d θ/d t = -θmax ωsi n (ωt + ϕ ) = -θmax ω = -0.80θ ω = -0.218 s -1 v = l d θ/d t = -0.218 s -1讨论 质点的线速度和角速度也可通过机械能守恒定律求解,但结果会有极微小的差别.这是因为在导出简谐运动方程时曾取sin θ ≈ θ ,所以,单摆的简谐运动方程仅在 θ 较小时成立.9-20 为了测月球表面的重力加速度,宇航员将地球上的“秒摆”(周期为 2.00s),拿到月 球上去,如测得周期为 4.90s,则月球表面的重力加速度约为多少? (取地球表面的重力加速度 g = 9.80 m ⋅s-2 ) 解 由单摆的周期公式T = 2π 可知 g ∝ 1 / T 2 ,故有 g / g = T 2 / T 2 ,则月球的重力加速度为 g = (T/ T M )2g M E E M= 1.63 m ⋅ s - 29-21 一飞轮质量为 12kg ,内缘半径 r =0.6m,如图所示.为了测定其对质心轴的转动惯量,现让其绕内缘刃口摆动,在摆角较小时,测得周期为 2.0s ,试求其绕质心轴的转动惯量.9-21 题图分析 飞轮的运动相当于一个以刃口为转轴的复摆运动,复摆振动周期为 T = 2π ,因此,只要知道复摆振动的周期和转轴到质心的距离l c ,其以刃口为转轴的 转动惯量即可求得.再根据平行轴定理,可求出其绕质心轴的转动惯量.解 由复摆振动周期T = 2π J / mgl ,可得 J = mgrT 2 / 4π2.则由平行轴定理得 J 0 = J - mr 2 = mgrT 2 / 4π 2 - mr 2 = 2.83 kg ⋅ m 29-22 如图(a )所示,质量为 1.0 ×10-2kg 的子弹,以 500m·s -1 的速度射入木块,并嵌在木块中,同时使弹簧压缩从而作简谐运动,设木块的质量为 4.99 kg ,弹簧的劲度系数为 8.0 ×103 N·m -1 ,若以弹簧原长时物体所在处为坐标原点,向左为 x 轴正向,求简谐运动方程.1 - cos2 (ωt + ϕ ) l / g E E题 9-22 图分析 可分为两个过程讨论.首先是子弹射入木块的过程,在此过程中,子弹和木块组成的系统满足动量守恒,因而可以确定它们共同运动的初速度 v 0 ,即振动的初速度.随后的过程是以子弹和木块为弹簧振子作简谐运动.它的角频率由振子质量 m 1 +m 2 和弹簧的劲度系数 k 确定,振幅和初相可根据初始条件(初速度 v 0 和初位移 x 0 )求得.初相位仍可用旋转矢量法求.解 振动系统的角频率为 ω == 40 s -1由动量守恒定律得振动的初始速度即子弹和木块的共同运动初速度 v 0 为v = m v (m + m ) = 1.0 m ⋅ s -10 1 1 2 又因初始位移 x 0 =0,则振动系统的振幅为A = = v 0/ ω = 2.5⨯10-2 m 图(b )给出了弹簧振子的旋转矢量图,从图中可知初相位 0 = π / 2 ,则简谐运动方程为x = 2.5⨯10-2 cos (40t + 0.5π) (m )9-23 如图(a )所示,一劲度系数为 k 的轻弹簧,其下挂有一质量为 m 1 的空盘.现有一质量为 m 2 的物体从盘上方高为 h 处自由落入盘中,并和盘粘在一起振动.问:(1) 此时的振动周期与空盘作振动的周期有何不同? (2) 此时的振幅为多大?k / (m 1 + m 2 ) x + ( 2 0 0 v / ω) 2x + (v / ω) 2 20 0题 9-23 图分析 原有空盘振动系统由于下落物体的加入,振子质量由 m 1 变为 m 1 + m 2,因此新系统的角频率(或周期)要改变.由于 A = ,因此,确定初始速度 v 0 和初始位移 x 0 是求解振幅 A 的关键.物体落到盘中,与盘作完全非弹性碰撞,由动量守恒定律可确定盘与物体的共同初速度 v 0 ,这也是该振动系统的初始速度.在确定初始时刻的位移 x 0 时,应注意新振动系统的平衡位置应是盘和物体悬挂在弹簧上的平衡位置.因此,本题中初始位移 x 0 ,也就是空盘时的平衡位置相对新系统的平衡位置的位移.解 (1) 空盘时和物体落入盘中后的振动周期分别为T = 2π / ω = 2π T ' = 2π / ω' = 2π 可见 T ′>T ,即振动周期变大了. (2) 如图(b )所示,取新系统的平衡位置为坐标原点 O .则根据分析中所述,初始位移为空盘时的平衡位置相对粘上物体后新系统平衡位置的位移,即x = l - l =m 1g - m 1 + m 2 g = - m 2 g 01 2 k k k式中 l 1 =m 1/k 为空盘静止时弹簧的伸长量,l 2 =(m 1 +m 2)/k 为物体粘在盘上后,静止时弹 簧的伸长量.由动量守恒定律可得振动系统的初始速度,即盘与物体相碰后的速度v 0 = m 2 v =m 1 + m 2 式中 v = 是物体由 h 高下落至盘时的速度.故系统振动的振幅为m 1 / k(m 1 + m 2 )/ km 2 m 1 + m 2 2gh2ghx +(2 v / ω ) ' 20 0x + 20 0( v/ ω) 211A ==本题也可用机械能守恒定律求振幅A.9-24如图所示,劲度系数为k 的轻弹簧,系一质量为m1的物体,在水平面上作振幅为A的简谐运动.有一质量为m2的粘土,从高度h 自由下落,正好在(a)物体通过平衡位置时,(b)物体在最大位移处时,落在物体上.分别求:(1)振动周期有何变化?(2)振幅有何变化?题9-24 图分析谐振子系统的周期只与弹簧的劲度系数和振子的质量有关.由于粘土落下前后,振子的质量发生了改变,因此,振动周期也将变化.至于粘土如何落下是不影响振动周期的.但是,粘土落下时将改变振动系统的初始状态,因此,对振幅是有影响的.在粘土落到物体上的两种不同情况中,系统在水平方向的动量都是守恒的.利用动量守恒定律可求出两种情况下系统的初始速度,从而利用机械能守恒定律(或公式A =)求得两种情况下的振幅.解(1)由分析可知,在(a)、(b)两种情况中,粘土落下前后的周期均为T =2π / ω =2πT '=2π / ω'=2π物体粘上粘土后的周期T′比原周期T 大.(2)(a)设粘土落至物体前后,系统振动的振幅和物体经过平衡位置时的速度分别为A、v 和A′、v′.由动量守恒定律和机械能守恒定律可列出如下各式kA'2 / 2 =m v2 / 2 (1)kA'2 / 2 =(m+m)v'2 / 22(2)联立解上述三式,可得m1v=(m1+m2)v'A'=(3)即A′<A,表明增加粘土后,物体的振幅变小了.(b)物体正好在最大位移处时,粘土落在物体上.则由动量守恒定律知它们水平方向的共同速度v′=m1v/(m1+m2)=0,因而振幅不变,即m2gk1 +2khm1+m2m1/ k(m1+m2)/ km1/(m1+m2)AA / a max max 0 max max 9-25 质量为 0.10kg 的物体,以振幅 1.0×10-2 m 作简谐运动,其最大加速度为 4.0 m·s -1求:(1) 振动的周期;(2) 物体通过平衡位置时的总能量与动能;(3) 物体在何处其动能和势能相等? (4) 当物体的位移大小为振幅的一半时,动能、势能各占总能量的多少?分析 在简谐运动过程中,物体的最大加速度 a = A ω 2,由此可确定振动的周期T .另外,在简谐运动过程中机械能是守恒的,其中动能和势能互相交替转化,其总能量 E =kA 2/2.当动能与势能相等时,E k =E P =kA 2/4.因而可求解本题.解 (1) 由分析可得振动周期 T = 2π / ω = 2π = 0.314 s(2) 当物体处于平衡位置时,系统的势能为零,由机械能守恒可得系统的动能等于总能量,即 E = E = 1 mA 2ω 2 = 1 mAak 2 2max = 2.0 ⨯10-3 J(3) 设振子在位移 x 0 处动能与势能相等,则有kx 2 / 2 = kA 2 / 4得 x 0 = ± 2 A / 2 = ±7.07 ⨯10-3 m(4) 物体位移的大小为振幅的一半(即 x = A / 2 )时的势能为 E = 1 kx 2 = 1 k ⎛ A ⎫ = E / 4 P 2 2 2 ⎪ ⎝ ⎭则动能为E K = E - E P = 3E / 4 9-26 一氢原子在分子中的振动可视为简谐运动.已知氢原子质量 m =1.68 ×10-27 Kg ,振动频率υ =1.0 ×1014 Hz ,振幅 A =1.0 ×10-11m.试计算:(1) 此氢原子的最大速度;(2) 与此振动相联系的能量.解 (1) 简谐运动系统中振子运动的速度 v =-A ωsin (ωt +φ),故氢原子振动的最大速度为v = ωA = 2πvA = 6.28⨯102 m ⋅ s -1 (2) 氢原子的振动能量E = mv 2 / 2 = 3.31⨯10-20 J 9-27 质量 m =10g 的小球与轻弹簧组成一振动系统, 按 x = 0.5(8πt + π / 3) (cm )的规 律作自由振动,求(1) 振动的角频率、周期、振幅和初相;(2) 振动的能量 E ;(3) 一个周期内的平均动能和平均势能.解 (1) 将 x = 0.5(8πt + π / 3) (cm )与 x = A cos (ωt + ϕ )比较后可得:角频率ω = 8π s -1 ,振 幅 A =0.5cm ,初相 φ=π/3,则周期 T =2π/ω=0.25 sA + A + 2 A A cos ( 2 2 1 2 1 2 ϕ - ϕ ) 2 1(2) 简谐运动的能量 E = 1 mA 2ω 2 = 7.90 ⨯10-5 J (3) 简谐运动的动能和势能分别为 E = 1 mA 2ω 2sin 2 (ωt + ϕ ) K 2E = 1 mA 2ω 2cos 2 (ωt + ϕ ) P 2则在一个周期中,动能与势能对时间的平均值分别为E = 1 ⎰T 1 mA 2ω 2 sin 2 (ωt + ϕ )d t = mA 2ω 2 = 3.95 ⨯10-5 J T 0 2 4E = 1 ⎰T 1 mA 2ω 2 cos 2 (ωt + ϕ )d t = mA 2ω 2 = 3.95 ⨯10-5 J T 0 2 49-28已 知 两 同 方 向 、 同 频 率 的 简 谐 运 动 的 运 动 方 程 分 别 为 x 1= 0.05cos (10t + 0.75π) (m ); x 2 = 0.06cos (10t + 0.25π) (m ) .求:(1) 合振动的振幅及初相;(2) 若有另一同方向、同频率的简谐运动 x 3 = 0.07co s (10t + ϕ3 ) (m ),则ϕ3 为多少时, x 1 +x 3 的振幅最大? 又ϕ3 为多少时,x 2 +x 3 的振幅最小?题 9-28 图分析 可采用解析法或旋转矢量法求解.由旋转矢量合成可知,两个同方向、同频率简谐运动 的合成仍为一简谐运动,其角频率不变;合振动的振幅 A = ,其大小与两个分振动的初相差ϕ2 - ϕ1 相关.而合振动的初相位ϕ = arctan [(A s in ϕ + A sin ϕ ) / (A cos ϕ + A cos ϕ )] 1 1 2 2 1 1 2 2解 (1) 作两个简谐运动合成的旋转矢量图(如图).因为∆ϕ 故合振动振幅为= ϕ2 - ϕ1 = -π / 2 , A = 合振动初相位= 7.8 ⨯10-2 m ϕ = arctan [(A s in ϕ + A sin ϕ ) / (A cos ϕ + A cos ϕ )] 1 1 2 2 1 1 2 2= arctan11 = 1.48 rad (2) 要使 x 1 +x 3 振幅最大,即两振动同相,则由∆ϕ= 2k π 得 A + A + 2 A A cos ( 2 2 1 2 1 2 ϕ - ϕ ) 21 K PA 2 + A 2 + 2A 2cos (π + ϕ - ϕ ) 2 12ϕ3 = ϕ1 + 2k π = 2k π + 0.75π, k= 0,±1,±2,...要使 x 1 +x 3 的振幅最小,即两振动反相,则由()得 ϕ3 = ϕ2 + (2k + 1)π = 2k π + 1.25π, k = 0,±1,±2,...9-29 手电筒和屏幕质量均为 m ,且均被劲度系数为 k 的轻弹簧悬挂于同一水平面上,如 图所示.平衡时,手电筒的光恰好照在屏幕中心.设手电筒和屏幕相对于地面上下振动的表达式分别为 x 1 = A cos (ωt + ϕ1 )和 x 2 = A cos (ωt + ϕ2 ).试求在下述两种情况下,初相位 φ1 、φ2 应满足的条件:(1) 光点在屏幕上相对于屏静止不动;(2) 光点在屏幕上相对于屏作振幅 A ′=2A 的振动.并说明用何种方式起动,才能得到上述结果.题 9-29 图分析 落在屏幕上的光点相对地面的运动和屏幕相对于地面的运动都已知道,且是两个简谐运动.因此由运动的合成不难写出光点相对屏的运动(实际上是两个同方向、同频率简谐运动的合成).根据相对运动公式,有依题意x 光对地 = x 光对屏 + x 屏对地x 光对地 = x 1 = A cos (ωt + ϕ1 ) x 屏对地 = x 2 = A cos (ωt + ϕ2 ) 所以 x 光对屏 = x 1 - x 2 = x 1 + x 2'= A cos (ωt + ϕ1 ) + A cos (ωt + π + ϕ2 ) 可见光点对屏的运动就是两个同方向、同频率简谐运动 x 1 = A cos (ωt + ϕ1 ) 和 x 2' = A cos (ωt + π + ϕ2 )的合成.用与上题相同的方法即可求解本题.其中合运动振幅 A ' = . 解 (1) 根据分析和参考上题求解,当要求任一时刻光点相对于屏不动,即 x 光对屏 = 0 ,就是 当π + ϕ2 - ϕ1 = (2k + 1)π 时,即ϕ = ϕ1 + 2k π 时( k = 0,±1,±2,...),A ′=0.当光点 相对于屏作振幅为 2A 的运动时,要求π + ϕ2 - ϕ1 = 2k π ,即ϕ2 = ϕ1 + (2k - 1)π .(2) 由以上求解可知,要使光点相对于屏不动,就要求手电筒和屏的振动始终要同步, 即同相位,为此,把它们往下拉 A 位移后,同时释放即可;同理,要使光点对屏作振幅为 2A 的谐振动,两者必须相位相反,为此,让手电筒位于平衡点 0 上方的-A 处,而屏则位于+A 处同。
大学物理第九章振动学基础
处2向AX轴负方向运动,而 2
试用旋转矢量法求这两个谐振动的初相差。 以及两个质点第一次通过平衡位置的时刻。
解:设两质点的谐振动方程分别为
x1
A cos (2
T
t
10)
20 A
x2
A cos (2
T
t
20)
10
4
20
0
3
4
A
2
1 10
O
X
质点1第一次经过平衡位置的时刻
t (2 / T )t 4
第九章 振动学基础
第九章 振动学基础
9-0 教学基本要求 9-1 简谐振动的规律 9-2 简谐振动的描述 9-3 简谐振动的合成
教学基本要求
一、理解简谐振动的基本特征, 了解研究谐振子模型的意义. *二、能建立一维简谐振动的微分方程, 能根据给定的初始条 件写出一维简谐振动的运动方程, 并理解其物理意义.
O后,仅因回复力(弹性力) 和惯性而自由往返运动.
F kx ma
F弹
x ox
a
d2x dt 2
F
m
k x m
d2x dt 2
k m
x
0
令 2 k
m
有
d2x dt 2
2
x
0
弹簧振子的振动微分方程(动力学方程)
解微分方程得
(1) 位移时间关系(振动方程)
x A cos(t )
(2)速度时间关系
2. 简谐振动的能量有什么特点?
3. 简谐振动的周期由什么因素决定?如何计算一简谐 振动的周期?
4. 研究谐振子模型的意义何在?
一、简谐振动的定义
1.弹簧振子 一个劲度系数为k的轻质弹簧的一端固定,另一端
大学物理(一)教学大纲
《大学物理(一)》课程教学大纲一、课程名称1.中文名称大学物理(一)2.英文名称 University Physics (I)3.课程号 WL310011二、学时总学时54学时其中:授课54学时实验0学时三、考核方式考试四、适用专业应用型非物理各专业五、课程简介(200字以内)本课程系统地阐述了物理学中“力学”和“热学”的基本概念、基本理论和基本方法。
“力学”包括质点运动学、牛顿定律、动量守恒定律和能量守恒定律、刚体转动、振动、波动、相对论等;“热学”包括气体动理论和热力学基础等。
六、本门课程在教学计划中的地位、作用和任务物理学是探讨人类直接接触世界、时间、空间、以及时空中的物质结构和物质运动规律的科学,物理学着重研究世界中最普遍、最基本的运动形式及规律。
因此,它是自然科学和工程技术的基础,也是人类思想方法、世界观建立的基础。
在高等工科院校中,物理是一门重要的必修基础课,是一门建立正确的科学思想和科学方法论的基础课。
它的教学目的和任务是: 使学生对物理学的基本概念、基本原理和基本规律有较全面系统的认识,了解各种运动形式之间的联系,以及物理学的近现代发展和成就。
使学生在运算能力、抽象思维能力和对世界的认识能力等方面受到初步的训练;熟悉研究物理学的基本思想和基本方法;培养学生分析问题和解决问题的能力。
使学生在学习物理学知识的同时,逐步建立正确的思想方法和研究方法,充分发挥本课程在培养学生辩证唯物主义世界观方面的作用,进行科学素质教育。
大学物理课的教学宗旨不仅是为后续专业课打好基础,而且也是使学生建立正确的科学思想和方法论的一门基础课。
作为处在当今科学、社会高速发展阶段的大学生,应了解科学的进展,具备科学的思想和方法。
学生通过物理学的学习可以培养自己判断、推理、归纳的逻辑思维能力;细致、敏锐、准确的观察能力、想象创造力和运用其他学科知识处理、解决实际问题的能力等。
这些能力正是人们在自然界和社会中生存与发展必不可少的基本素质。
大学物理旋转矢量

极坐标表示法
极坐标与平面角
旋转矢量在极坐标系中由一个起点、一个长度和一个平面角唯一确定。平面角表示矢量旋转的方向和角度。
旋转矢量的运算
在极坐标系中,可以通过加减、数乘等运算得到新的旋转矢量。
直角坐标表示法
直角坐标与平面矢量
旋转矢量在直角坐标系中由三个分量唯一确定,这三个分量表示矢量在x、y、z轴上的投影。
结论总结
总结实验结果,得出结论,并指出实验的局限性和未来改进的方向 。
THANKS
感谢观看
旋转矢量的积分
当一个旋转矢量在某区间内进行积分时,其 结果为该区间内所有点处的切线方向与该区 间内所有点处的速度方向一致的点所组成的
线段。
04
旋转矢量在物理中的应用
角动量守恒定律
角动量定义
物体的转动惯量和转动半径的乘积称为角动量。
角动量守恒定律
在没有外力矩作用的情况下,物体的角动量保持不变。
旋转矢量表示
旋转矢量的应用领域
物理学
旋转矢量在物理学中广泛应用于描述物体的 旋转运动,如刚体的转动、电磁场的旋涡等 。
工程学
在机械工程、航空航天等领域,旋转矢量可以用于 分析物体的动态平衡、稳定性等问题。
电子技术
在电子技术中,旋转矢量可以用于描述信号 的相位、频率等参数,以及进行数字信号处 理。
02
旋转矢量的表示方法
03
旋转矢量的运算规则
加法运算规则
平行四边形法则
当两个旋转矢量相加时,以两个矢量的末端 为起点,分别画出平行四边形的两个相邻边 ,连接对角线,得到的结果是两个旋转矢量 相加后的矢量。
三角形法则
当两个旋转矢量相加时,以一个矢量的起点 为起点,画另一个矢量的平行线,得到的结 果是两个旋转矢量相加后的矢量。
大学物理A第九章简谐振动

第九章 简谐振动一、填空题(每空3分)9-1 质点作简谐振动,当位移等于振幅一半时,动能与势能的比值为 ,位移等于 时,动能与势能相等。
(3:1,A )9-2两个谐振动方程为()120.03cos (),0.04cos 2()x t m x t m ωωπ==+则它们的合振幅为 。
(0.05m )9-3两个同方向同频率的简谐振动的表达式分别为X 1=6.0×10-2cos(T π2t+4π) (SI) , X 2=4.0×10-2cos(Tπ2t -43π) (SI) ,则其合振动的表达式为______(SI).( X=2.0×10-2cos(T π2t+4π) (SI)) 9-4一质点作周期为T 、振幅为A 的简谐振动,质点由平衡位置运动到2A处所需要的最短时间为_________。
(12T) 9-5 有两个同方向同频率的简谐振动,其表达式分别为 )4cos(1πω+=t A x m 、)43cos(32πω+=t A x m ,则合振动的振幅为 。
(2 A)9-6 已知一质点作周期为T 、振幅为A 的简谐振动,质点由正向最大位移处运动到2A处所需要的最短时间为_________。
(6T) 9-7有两个同方向同频率的简谐振动,其表达式分别为 )75.010cos(03.01π+=t x m 、)25.010cos(04.02π-=t x m ,则合振动的振幅为 。
(0.01m )9-8 质量0.10m kg =的物体,以振幅21.010m -⨯作简谐振动,其最大加速度为24.0m s -⋅,通过平衡位置时的动能为 ;振动周期是 。
(-32.010,10s J π⨯) 9-9一物体作简谐振动,当它处于正向位移一半处,且向平衡位置运动,则在该位置时的相位为 ;在该位置,势能和动能的比值为 。
(π)9-10质量为0.1kg 的物体,以振幅21.010m -⨯作谐振动,其最大加速度为14.0m s -⋅,则通过最大位移处的势能为 。
大学物理第九章振动学基础习题答案

第九章 振动学习题9-1 一小球与轻弹簧组成的振动系统,按(m) 3ππ8cos 05.0⎪⎭⎫ ⎝⎛+=t x ,的规律做自由振动,试求(1)振动的角频率、周期、振幅、初相、速度最大值和加速度最大值;(2)t=1s ,2s ,10s 等时刻的相位;(3)分别画出位移、速度和加速度随时间变化的关系曲线。
解:(1)ω=8πs -1,T=2π/ω=0.25s ,A=0.05m ,ϕ0=π/3,m A ω=v ,2m a A ω=(2)π=8π3t φ+ (3)略 9-2 一远洋货轮质量为m ,浮在水面时其水平截面积为S 。
设在水面附近货轮的水平截面积近似相等,水的密度为ρ,且不计水的粘滞阻力。
(1)证明货轮在水中做振幅较小的竖直自由运动是谐振动;(2)求振动周期。
解:(1)船处于静止状态时gSh mg ρ=,船振动的一瞬间()F gS h y mg ρ=-++ 得F gSy ρ=-,令k gS ρ=,即F ky =-,货轮竖直自由运动是谐振动。
(2)ω==,2π2T ω==9-3 设地球是一个密度为ρ的均匀球体。
现假定沿直径凿通一条隧道,一质点在隧道内做无摩擦运动。
(1)证明此质点的运动是谐振动;(2)计算其振动周期。
解:以球心为原点建立坐标轴Ox 。
质点距球心x 时所受力为324433x m F G G mx x πρπρ=-=- 令43k G m πρ=,则有F kx =-,即质点做谐振动。
(2)ω==2πT ω== 9-4 一放置在水平桌面上的弹簧振子,振幅A =2.0 ×10-2 m ,周期T =0.50s 。
当t =0时,(1)物体在正方向端点;(2)物体在平衡位置,向负方向运动;(3)物体在x =1.0×10-2m 处,向负方向运动;(4)物体在x =-1.0×10-2 m 处,向正方向运动。
求以上各种情况的振动方程。
解:ω=2π/T=4πs -1(1)ϕ0=0,0.02cos4(m)x t π=(2)ϕ0=π/2,0.02cos 4(m)2x t ππ⎛⎫=+ ⎪⎝⎭ (3)ϕ0=π/3,0.02cos 4(m)3x t ππ⎛⎫=+ ⎪⎝⎭ (4)ϕ0=4π/3,40.02cos 4(m)3x t ππ⎛⎫=+ ⎪⎝⎭9-5 有一弹簧,当其下端挂一质量为m 的物体时,伸长量为9.8 ×10-2 m 。
大学物理12机械振动2
A
x x−t 图
T
ω v = − A ω sin( ω t + ϕ )
π = Aω cos(ωt +ϕ + ) 2 2 a = − A ω cos( ω t + ϕ )
= Aω cos(ωt +ϕ + π)
2
T=
2π
取ϕ = 0
− Aω
v v −t图 Aω o T
l = l0 1− (v / c)2
在飞船B上测得飞船 相对于飞船 的速度: 在飞船 上测得飞船A相对于飞船 的速度: 上测得飞船 相对于飞船B的速度
v = l / ∆t = (l0 / ∆t) 1−(v / c)
解得:v = l0 / ∆t 1 + (l0 / c∆t )
2
2
= 2.68 ×10
8
∆φ > π 3π 称振动( )落后于振动( ) φ2 −φ1 > 0 例:φ2 −φ1= 2 称振动(2)落后于振动(1) 2π − ∆φ
分别作出四种情况的矢量图! 分别作出四种情况的矢量图!
2 4
∆ϕ21 = (ω t + ϕ2 ) - (ω t + ϕ1) = ϕ2 - ϕ1
φ2 −φ1 < 0 例:φ2 −φ1= − 3π称振动(2)超前振动(1) 2π + ∆φ 称振动( )超前振动( )
90
v am
ω
0
ω t+ϕ
·
x
1、用旋转矢量方法确定初相位ϕ: 、 要求条件: 的关系, 要求条件:已知 x0 与A的关系,初速度的方向。 的关系 初速度的方向。 例1: 已知一物体做简谐振动。1)x0=(1/2)A且向位移的 : 已知一物体做简谐振动。 ) 且向位移的 且向位移的正方向运动。 负方向运动; ) 且向位移的正方向运动 负方向运动; 2)x 0= 0且向位移的正方向运动。试求 两种情况下的初相。 两种情况下的初相。 ϕ = π/3
大学物理第九章简谐运动

t 确定, 振动状态确定
O
A
O X X
初相位:=/3
判断: t = 0, 振子的初位移、初速度 x0=A/2, v0<0(向x轴负方向运动)
用旋转矢量描述简谐振动:
O
O X 判断: t = 0,
A
X
=/2
振子的初位移、初速度
x0=0, v0<0 (向x轴负方向运动)
用旋转矢量描述简谐振动:
14
讨论
相位差:表示两个相位之差
(1)对于两个同频率的简谐运动,相位 差表示它们间步调上的差异(解决振动合成 问题). x1 A1 cos(t 1 ) x2 A2 cos(t 2 )
(t 2 ) (t 1 )
2 1
15
合成
简谐运动 谐振子 分解 复杂振动
作简谐运动的物体
8
弹簧振子的振动模型
弹簧和一谐振子组成的振动系统。
l0 k
m
x
C
o
B
x xB F FB
x 0 F 0 平衡位置
x xc v 0
9
振动的成因
a 回复力
b 惯性
10
弹簧振子的动力学分析
F
o
F kx ma
2
m
x
解得 x A cos(t )
简谐运动方程
积分常数,根据初始条件确定
12
由 x A cos(t )
简谐运动方程
简谐振动的各 阶导数也都作 简谐振动
dx 得 v A sin(t ) dt A cos t 2 d2 x a 2 A 2 cos(t ) dt
大学物理 旋转矢量(一)

大学物理旋转矢量(一)引言概述:在大学物理的学习中,旋转矢量(一)是一个重要的知识点。
旋转矢量是描述物体在空间中旋转运动的工具,它具有方向和大小,并可以表示绕定轴进行的旋转。
本文将围绕旋转矢量展开讨论,依次讲解旋转矢量的基本概念、旋转轴和角速度、刚体的定点转动、角动量和力矩、以及旋转的动力学方程。
一、旋转矢量的基本概念1. 旋转的定义与描述2. 旋转角度的表示方法3. 旋转矢量的含义与性质4. 旋转矩阵的使用及推导5. 旋转矢量与坐标系的转换二、旋转轴和角速度1. 旋转轴的定义与求解2. 旋转轴的方向确定方法3. 角速度的概念与计算4. 角速度的单位及数值表达5. 转动矢量与角速度的关系三、刚体的定点转动1. 定点转动的定义与特点2. 转动惯量的概念与计算3. 定点转动的动力学方程4. 定点转动的动力学矢量关系5. 刚体定点转动现象的实例分析四、角动量和力矩1. 角动量的概念与性质2. 角动量的计算与单位3. 力矩的定义与计算4. 力矩的性质与作用5. 角动量和力矩的关系及应用五、旋转的动力学方程1. 旋转的动力学定律与原理2. 牛顿第二定律在旋转运动中的应用3. 旋转的动力学方程的推导过程4. 动力学方程与运动学方程的对应关系5. 旋转动力学方程实际问题的解析解和数值解总结:通过本文的介绍,我们对大学物理中的旋转矢量有了更深入的认识。
我们了解到旋转矢量的基本概念、旋转轴和角速度的计算方法、刚体的定点转动特性、角动量和力矩的关系,以及旋转的动力学方程的应用。
这些知识将有助于我们理解旋转运动的本质和规律,为进一步的学习和研究打下了基础。
大学物理 旋转矢量(两篇)2024

引言概述:在大学物理学中,旋转矢量(二)是一个重要的概念。
它在描述物体旋转和角动量时发挥着关键作用。
本文将详细阐述旋转矢量的相关内容,包括其定义、性质以及在实际应用中的应用案例等。
正文内容:一、旋转矢量的定义1.旋转矢量的概念和来源2.旋转矢量的数学表示和坐标系选择3.旋转矢量的物理意义和几何解释4.旋转矢量与旋转矩阵的关系5.旋转矢量的性质和基本运算法则二、旋转矢量的旋转定理1.旋转矢量的定义和旋转方向2.旋转定理的几何解释和物理意义3.旋转定理的数学推导和证明4.旋转定理的应用案例:刚体的旋转运动5.旋转定理的实验验证和实际应用三、旋转矢量的角动量1.角动量的定义和物理性质2.角动量的计算方法和表达式3.角动量守恒定律和旋转矢量的关系4.角动量的变化和影响因素5.角动量对物体运动轨迹的影响和解释四、旋转矢量的应用案例1.旋转矢量在力学和动力学问题中的应用2.旋转矢量在电磁学和光学问题中的应用3.旋转矢量在量子力学和粒子物理学问题中的应用4.旋转矢量在天体力学和宇宙学问题中的应用5.旋转矢量在工程和技术领域中的实际应用五、旋转矢量的拓展与发展1.旋转矢量的局限性和扩展性2.旋转矢量在现代物理学和数学中的发展趋势3.旋转矢量在计算机图形学和虚拟现实领域中的应用4.旋转矢量的研究方法和实验手段5.旋转矢量相关学科和概念的比较和关联总结:旋转矢量作为大学物理学的重要内容,在描述物体旋转和角动量时具有不可替代的作用。
本文从旋转矢量的定义、性质和旋转定理开始,详细阐述了其在实际应用中的案例和应用领域。
同时,展望了旋转矢量的拓展与发展,以及与其他学科和概念的比较与关联。
通过对旋转矢量的深入研究和理解,有助于我们更好地理解物体的旋转规律和角动量的变化,为解决各种实际问题提供了强有力的工具和方法。
引言概述:旋转矢量是大学物理中一个重要概念,它在描述物体或系统的旋转运动中起到了关键作用。
本文将从基本概念出发,分析旋转矢量的定义、性质和应用,并探讨其在物理学中的重要性。
大学物理B2_第9章_1
19
第九章 振动1
二阶常系数齐次微分方程的解:
2 2 s 2Ce st 2Ce st 0 s 0 s j 其中 j 1
d 2x 2 x0 2 dt
st 设解为: x Ce 代入微分方程
jt jt x C1e s1t C2 es2t x C1e C2 e
mg kl
d 2x m 2 kx dt d 2x 2 x0 2 dt
k m
2
所以该系统是作简谐振动
11
2014年10月15日星期三
第九章 振动1
-2kg x 如图 9.8cos(10 t10 ) ,弹簧的静止形变为 cm 例2. m=2× l=9.8cm,t=0 时, t 0, x0 0, 取开始振动时为计时零点,写出振动方程; v0 0 (2) x 。⑴ 0=-9.8cm,v0=0
7
第九章 振动1
简谐振动图象表示:
x
A
x t v t
图
t
x A cos(t )
图
A
v
t
dx v Vm cos(t ) dt 2
dv a Am cos(t ) dt
2014年10月15日星期三
a t
图
A
2
a
t
8
第九章 振动1
四、简谐振动的特征物理量
A x (
2 0
mg l 解: v0 A k sin 0
2
-5
-10
10
5
O
-5 -10
0.2
l
FS
0.6 0.8 1
0.4
v0
大学物理作业解答
2-22 质量为m 的小球A,以速度 v 0 沿质量为M,半径为R的地
球表面切向水平向右飞出。 OC =3R。求C 点的速度。 (略空气阻力及地球自转。)
解∶取小球与地球为系统,机械能守恒:
M
m
O R
v0
C
O
1 2 G0 Mm 1 2 G0 Mm mv 0 mv 2 R 2 3R
fr
N
Afr E2 E1
Afr f r dx cos L x gdx
l a
l x g
1 2 g l a 2
作业5-3:一链条总长l,质量为m,放在桌面靠边处,下垂一端长 为a,链条与桌面的滑动摩擦系数为 ,链条由静止开始运动。 求:(1)链条离开桌边过程中,摩擦力对链条作的功? (2) 链条离开桌边时的速度?
1 2 Afr g l a 2
以桌面为重力势能零点,
fr
N
1 2 l a E2 E1 mv mg 0 ag 2 2 2
l x g
v
g2 2 2 l a l a l
a x 10 0.02 2 (m s )
2 2
2
回复力
F kx 50 0.02 1 ( N)
(3)振子速度具有正最大值,是位于平衡位置向
正方向运动,由旋转矢量法可知
x
2
所以振动方程为
x 0.04 cos10t (SI) 2
0
m
r0 o
v
解 小球所受的力中,重力和桌面的支持力 抵消,只有绳的拉力影响小球的运动。 拉力的作用线通过o点,对o点 的力矩为零,故小球在运动中 对o点的角动量守恒,于是有 r0 2 2 mr0 0 m( ) 2
旋转矢量法描述简谐波
( 4 ) 矢 端加速 度在 Y轴上 投影 的负 值 即是该 质
点 的加 速度.
( 5 ) 该 质点动 能与 势能 的 比值
Ek
图 1
, MP\
E 一\ O P/
对 于第 5点 , 由于位 于 5 C处 的质点 做类 简 谐振
如图 1为 旋转 矢 量 图 , 矢端 沿 圆周运 动 的 角速
摘 要 : 采 用 旋 转 矢 量 法 将 简 谐 波 的时 间性 与 空 间性 , 各质点的能量 、 相位 、 位移 、 速 度 以及 加 速 度 均 反 映 到 矢 量 图中, 并利用该方法探究同方向 、 同频 率 波 的 合 成 问 题 , 直 观 地 反 映 合 成 波 的相 关 性 质 .
【 例 1 】一 平 面简 谐 波沿 z轴 正 向传 播 , 已知 距
[ Al s i n ( 一 h + 1 ) +
A2 s i n( 一 疋 r + 2 )s i no a o z ( 1 5 )
波 源 z一 2 m 处 的质点 M 在 t :2 s 时刻 , 向下 运动 且 相位为 , 波长 为 6 0 m, 周期 为 3 s . 求:
y — y1 + 2 ( 1 4 )
式( 1 2 ) 、 ( 1 3 ) 代 人式 ( 1 4 ) 整理, 得
一
所 以
[ A1 c o s ( 一 妇 十 1 ) + A 2 c o s ( 一 + 2 ) ] o o s  ̄ 0 t 一
鲁 E 一 ( \ / O P ) 。
^
为波 长. 其 波上各 质点 的位移 、 速度 、 加速 度 等
学习简谐 波 的过程 中, 对 波 的相 位 、 时间性 与空 间性
大学物理学教学中初相位的求解——旋转矢量法

大学物理学教学中初相位的求解——旋转矢量法
初相位的求解作为理论物理学中一个重要的内容经常被大学物理学教学中提及,相比较传统的三角函数法,旋转矢量法作为一种新的数学计算方式正逐步在各个大学物理教学中得到应用,本文将以此方式进行初相位的求解及应用。
旋转矢量法是一种计算变换位置、旋转之间关系的重要方法,可以把旋转视为矢量,这种矢量可以是旋转轴向量乘以旋转角度的形式。
在计算初相位时,可以利用旋转矢量的相加、相减,从而得出相应的位置、角度变换及旋转信息,从而解决初相位求解问题。
旋转矢量法具体应用于初相位求解时如下:
(1)以坐标系0-A,以A点为原点,以X轴为横轴,以Y轴为纵轴。
(3)从A点到B点的位移量为Rb,定义α角为旋转量,此旋转的旋转轴向量为:
U=(X`Y`Z`)。
(5)根据位移量Ra和α角,计算出旋转矢量:〖R_b〗^α=(X^`Y^`Z^`)。
(6)由计算出的旋转矢量〖R_b〗^α和位移量Ra,求出从A点到B点的旋转量Φ:Φ=〖R_a〗^α+Ra,Φ即为A点到B点的初相位。
(9)根据计算出的β角得出从A点到B点的旋转量γ:γ=β- α。
以上就是应用旋转矢量法求出初相位的步骤,3D旋转的运算角度可以根据同理求出。
传统的三角函数法只能表示2D的运算,而旋转矢量法则不仅可以求出2D的运算,还可以求出3D的运算,可以用来解决复杂的初相位求解问题。
总之,旋转矢量法作为一种基于几何的运算方式,其优点可以体现在于它融合几何和代数在一起,能够有效解决复杂多轴的位移、角度变换及旋转运算的问题,可以有效求解初相位问题。
从而为进一步的理论物理数学研究打下基础。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x
o
9-2
旋转矢量
k 0.72N m 解 ( 1) m 0.02kg
1
6.0s 1
v A x x0 0.05m
2 0
2 0 2
v0 tan 0 x0
o
A
x
0 或 π
由旋转矢量图可知
0 x A cos(t ) 0.05cos(6.0t )
o
x/m
0.0知 m 0.01 kg, A 0.08 m, T 4 s
t 1.0 s, x, F t 0, x 0.04 m, v0 0 求(1) 2 π π 1 解 A 0.08 m s T 2 t 0,x 0.04 m π 代入 x A cos( t ) 3 π v0 0 A 3 π x/m 3
i
A5
A0
A 2 O A6 A x 1
A4 A3
9-5
简谐运动的合成
四 的合成
两个同方向不同频率简谐运动
9-5
简谐运动的合成
频率较大而频率之差很小的两个同方 向简谐运动的合成,其合振动的振幅时而 加强时而减弱的现象叫拍.
x1 A1 cos1t A1 cos2 π1t
讨论
1)相位差
A
A A 2 A1 A2 cos( 2 1 )
2 1 2 2
2 1 2k π (k 0 , 1, 2)
x
x
o A
o
T
A A1 A2 x ( A1 A2 ) cos(t ) 2 1 2k π
A2
2
0
A
x
x
x x1 x2
x A cos(t )
2 1 2 2
x2
1
x1
A1
A A A 2 A1 A2 cos( 2 1 )
A1 sin 1 A2 sin 2 tan A1 cos 1 A2 cos 2
两个同方向同频 率简谐运动合成 后仍为简谐运动
2 1
2
t ) cos 2 π
2 1
2
t
振幅部分
合振动频率
振动频率 (1 2 ) 2 振幅 A 2 A1 cos 2 π
2 1
2
Amax 2 A1
t
Amin 0
9-5
简谐运动的合成
x (2 A1 cos 2 π
2 1
2
t ) cos 2 π
2 1
2
t
2 1 2π T π 2
1 T 2 1
拍频(振幅变化的频率)
2 1
9-5
简谐运动的合成
方法二:旋转矢量合成法
( 2 1 )t ( 2 1 )
2t 2
A 2 2
1 A1
A
2 1
1t 1
m 0.01 kg
0.08 0.04
v
o
0.04 0.08
x/m
9-2
旋转矢量
(2)由起始位置运动到x = -0.04 m处所需 要的最短时间.
法一 设由起始位置运动到x= -0.04 m处所 需要的最短时间为t
v
0.08 0.04
x/m
o
0.04
0.08
9-2
旋转矢量
π π π π x 0.08 cos( t ) 0.04 0.08 cos( t ) 2 3 2 3 1 π arccos( ) 2 2 3 t 0.667 s π2 3
为其它
超前
落后
(t 2 ) (t 1 )
0 同步
π 反相
x
x
x
o
t
o
t
o
t
9-2
旋转矢量
例1 如图所示,一轻弹簧的右端连着一物体,弹 1 簧的劲度系数 k 0.72N m ,物体的质量 m 20g .
(1)把物体从平衡位置向右拉到 x 0.05 m 处停 下后再释放,求简谐运动方程; A (2)求物体从初位置运动到第一次经过 处时的 2 速度; (3)如果物体在 x 0.05 m 处时速度不等于零, 1 而是具有向右的初速度 v0 0.30m s ,求其运动方程 .
y
A2
o
A1
x
9-5
简谐运动的合成
讨 论
x 2 y 2 2 xy 2 cos( ) sin ( 2 1 ) 2 1 2 2 A1 A2 A1 A2
(3)2 1 π 2
y
A2
x2 y2 2 1 2 A1 A2
o
A1
x
x A1 cost π y A2 cos(t ) 2
9-2
旋转矢量
A 解 ( 2) x 2
x A cos(t ) A cos(t )
A
x 1 cos( t ) A 2
π 由旋转矢量图可知 t 3
π 5π t 或 3 3
A
o
v A sin t
A 2
x
0.26m s
1
(负号表示速度沿 Ox 轴方向)
2 1 2 2
x
x
o 2
A 2
A1
A A1 A2 2
o
T
t
A
9-5
简谐运动的合成
小结
1)相位差
2 1 2k π
A A1 A2
(k 0 , 1)
相互加强
2)相位差 2
1) 1 (2k 1)π (k 0 ,
A A1 A2
x2 A2 cos2t A2 cos2 π 2t
x x1 x2
讨论 A1 A2 , 2 1 1 2 的情况
9-5
简谐运动的合成
方法一 x x1 x2 A1 cos2 π1t A2 cos2 π 2t
x (2 A1 cos 2 π
9-2
旋转矢量
y vm
t
0
an
π t 2
A
vm A
v a
x
an A
2
x A cos(t )
π v A cos( t ) 2
a A cos(t )
2
9-2 用旋转矢量图画简谐运动的
旋转矢量 图
o
x2
x1
x
x
1 2 0
2 π( 2 1 )t
9-5
简谐运动的合成
振幅 A A1 2(1 cos )
2 A1 cos(
2 1
2
t)
2
A2
( 2 1 )t
A
拍频
2 1
o
x2
A1 1
x1
x
x
振动圆频率
2
2
9-5
简谐运动的合成
讨 论
x 2 y 2 2 xy 2 cos( ) sin ( 2 1 ) 2 1 2 2 A1 A2 A1 A2
y
2 1 0或 2 π ( 1) A2 y x A1
A2
o
A1
x
2 1 π ( 2) A2 y x A1
0.08 0.04
o
0.04
0.08
9-2
旋转矢量
π 3 π π x 0.08 cos( t ) 2 3 t 1.0 s, x, F 可求(1) t 1.0 s 代入上式得 x 0.069 m
F kx m 2 x 1.70 10 3 N
π 0.0707 cos( 6.0t ) 4
9-2
旋转矢量
例2 一质量为0.01 kg的物体作简谐运动, 其振幅为0.08 m,周期为4 s,起始时刻物体在 x=0.04 m处,向ox轴负方向运动(如图).试求 (1)t=1.0 s时,物体所处的位置和所 受的力;
v
0.08 0.04
9-5
简谐运动的合成
用旋转矢量描绘振动合成图
9-5
简谐运动的合成
两相 互垂直同 频率不同 相位差简 谐运动的 合成图
9-5
*三
简谐运动的合成
多个同方向同频率简谐运动的合成
x1 A1 cos( t 1 )
x2 A2 cos( t 2 )
A3 A
1 A1
9-2 解 ( 3)
旋转矢量
1
x0 0.05m
A' x
2 0
v0 0.30m s
v
v0 tan' 1 x0
π 3π ' 或 4 4
2 0 2
0.0707m
π 由旋转矢量图可知 ' 4
o
π 4
x
x A cos(t )
A'
x1 x2 cost A
1t 2t
1 2
2
2 1
9-5
简谐运动的合成
五
两相互垂直不同频率的简谐运动的合成
李 萨 如 图
v
0.08 0.04
x/m
o
0.04
0.08
9-2
旋转矢量
法二
t
时刻
t
π3 π3
起始时刻
0.08 0.04