雷达目标微动特性(黎湘,刘永祥,李康乐)思维导图
空间目标进动特性及在雷达识别中的应用.pdf

第 !" 卷 因此可以将! 作为“特征量”来区分结构相似的真 假弹头目标 ! 式中变量 " 可以通过多种途径获得, 如高分辨成像、先验知识等 ! 则问题的关键就归结 为如何获取目标的进动参数 !
第 !! 期
#$$" 年 !! 月
)++)
( +) 为 "#$ 采样值, 0 为采样点数 ! $1 ,-$. ( 求取使得 & 最小的% 和&!
考虑质心运动时的进动参数估计结果 真实值 估计值
表# 实验次数 ! ( )
! " #$! " " %! ! " &#! " " %! ! " &%! " " *! ! " &#! " " !(!
! " &’ " ’!! " " % " !$! ! " &# " $%! " " ) " ’%! ! " &) " ’’! " " * " $!! ! " && " ’!! " " !( " !$!
(
)
在不 考 虑 弹 头 质 心 运 动 的 情 况 下,雷 达 视 线 ( 45/6 -7 .589#) 和锥体对称轴 ! ( 的夹角即为目标 123 视线角 [ .5/ (& % ’ *+,,-. #.5/ !" ) & )( ,-. #,-. &,-. &], (&) 其中 & 为雷达视线 123 与空间定向角动量 " 之间 的夹角,也称平均视线角 $ 假设均质锥体的密度为 ’,根据转动惯量定义 #! + " , ’ ’+ " * ’ ’ + " * ,分别以 - 轴和 . * * *
雷达原理教学课件—第五章 雷达作用距离

① 虚警概率(门限)一定时,信噪比越大,发 现概率越大。信噪比对发现概率的影响较大。
② 虚警率越低,则门限电平越高。
第五章 雷达作用距离
雷达系统中采用的是CFAR检测器( 恒虚警检测器) 检测概率和虚警概率(采样)的直观 理解(A/D变换后回波的离散采样)
作业
第五章 雷达作用距离
的噪声是宽带高斯噪声, 其概率密度函数由下
式给出:
p(v)
1
2
exp(
v2
2 2
)
高斯噪声通过窄带中频滤波器(其带宽远小于
其中心频率)后加到包络检波器, 根据随机噪声
的数学分析可知, 包络检波器输出端噪声电压
振幅的概率密度函数(瑞利分布)为
p(r)
r
2
exp(
r2
2 2
)
r0
第五章 雷达作用距离
1、雷达带宽B=50kHz,平均虚警时间为10分钟,则该 雷达的虚警概率是多少?虚警总数又是多少?
解:
雷达的虚警概率为: Pfa
1
BIF Tfa
1 50 103 10 60
3.33 108
雷达的虚警总数为: nf
1
Pfa
3 107
第五章 雷达作用距离
★ 脉冲积累NS o对min =D检o 测性能的改善
虚警 真实目标A、B、C
第五章 雷达作用距离
当按图中所设的门限电平2来进行检测判决时,此时会出现 虚警现象,即
除了目标A、B和C三个真实目标可以被检出外,在D和E 处的噪声电平因为超过门限值,因而也被误认为是目标信号
检测判决准则
第五章 雷达作用距离
雷达系统中主要使用检测概率和虚警概率 这两个物理量。
雷达原理(第三版)第8章概论
c
f c
(8.1.9)
第 8 章 运动目标检测及测速
这 个 条 件 是 经 常 满 足 的 , 例 如 若 目 标 速 度 为 10 倍 音 速 , vr=3.3×103 m/s, 则2vr/c≈ 2×10-5, 这样即使信号的时间带宽积τΔf 为1000数量级时, 不等式(8.1.9)仍能满足。以上讨论均忽略了目 标加速度引起的影响。可以看出, 在当前目标运动的速度范围内, 运动目标回波的表达式(8.1.4)可以近似为
第 8 章 运动目标检测及测速
2. 常用雷达信号为窄带信号(带宽远小于中心频率)。 其发射 信号可以表示为
s(t) Re[u(t)e j0t ]
式中,Re表示取实部; u(t)为调制信号的复数包络; ω0为发射角频 率。
同连续波发射时的情况相似, 由目标反射的回波信号sr(t)可 以写成
sr (t) ks(t tr ) Re[ ku(t tr )e j0 (ttr ) ] (8.1.4)
R(t' ) R0 vrt'
往返R(t′)距离所需的时间正是目标的延迟时间tr, 即
可解得结果
R(t' )
2 c
tr
tr
c
1 vr
(2R02vrt)
(8.1.5) (8.1.6)
第 8 章 运动目标检测及测速
将tr代入式(8.1.1)可得运动目标回波为
sr (t)
k' cos0
c c
vr vr
sr
(t)
Re k '
u
c c
vr vr
t
2R0 c vr
exp
j0
c c
vr vr
t
雷达原理(第三版) 丁鹭飞 第6章PPT课件
R c
Rc
(6.1.3)
13
第 6 章 目标距离的测量
随着距离R的增大, ΔR也增大。在昼夜间大气中温度、 气压及湿度的起伏变化所引 起的传播速度变化为Δc/c≈10-5, 若用平均值c作为测距计算的标准 常 数 , 则 所 得 测 距 精 度 亦 为 同 样 量 级 , 例 如 R=60 km 时 , ΔR=60×103×10-5=0.6m的数量级,对常规雷达来讲可以忽略。
掠速度, 这是距离可分的临界情况,
Δrc
为
rc
c 2
ห้องสมุดไป่ตู้
d vn
式中, d为光点直径; υn为光点扫掠速度(cm/μs)。
23
第 6 章 目标距离的测量
光点直径vdn
τ
+
d vn
图6.5 距离分辨力
24
第 6 章 目标距离的测量
用电子方法测距或自动测距时, 距离分辨力由脉冲宽度τ或波
门宽度τe决定, 如图6.3所示, 脉冲越窄, 距离分辨力越好。 对于复 杂的脉冲压缩信号, 决定距离分辨力的是雷达信号的有效带宽B,
BL为其调制带宽。
22
第 6 章 目标距离的测量
6.1.3 距离分辨力和测距范围
距离分辨力是指同一方向上两个大小相等点目标之间最
小可区分距离。在显示器上测距时, 分辨力主要取决于回波的
脉冲宽度τ, 同时也和光点直径d所代表的距离有关。如图6.5所
示的两个点目标回波的矩形脉冲之间间隔为τ+d/υn, 其中υn为扫
有效带宽越宽, 距离分辨力越好。 距离分辨力Δrc可表示为
rc
c 2
1 B
(6.1.5)
测距范围包括最小可测距离和最大单值测距范围。所谓最小可
雷达方程图解(北航课件)
(w/m2)
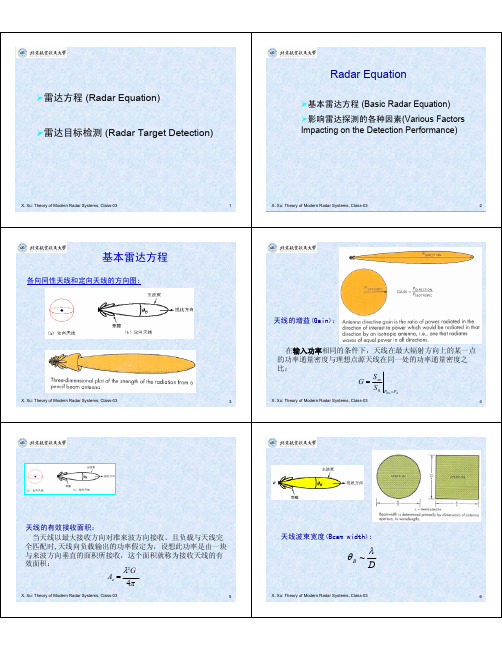
用雷达散射截面(Radar Cross Section, RCS)来度量。
σ = lim{4πR 2 ×
R →∞
定向天线: 若增益为Gt, 则
目标 散射功率密度 (雷达 处! ) } 入射到目标 的功率密度 (目标 处! ) Es
2 2
PG S1 = t t2 4πR
X. Xu: Theory of Modern Radar Systems, Class-03
所以,
Pi ( SNR ) in kTs Bn = = Pi Ga ( SNR ) out N
S 输出信号功率 Ga = o = S i 输入信号功率
F=
( SNR ) i P/N = i i ( SNR ) o Po / N o
So it is ALWAYS true that F>1 !
38
X. Xu: Theory of Modern Radar Systems, Class-03
SNR =
Ps N
X. Xu: Theory of Modern Radar Systems, Class-03
21
X. Xu: Theory of Modern Radar Systems, Class-03
22
为了能使雷达可靠 地检测目标,一般要求 接收到的回波功率 Pr 必须超过某个最小可检 测信号功率 Ps min 当
27
X. Xu: Theory of Modern Radar Systems, Class-03
28
Aperture Size:
影响雷达探测的其他重要因素: (1)最小可检测信号的统计特性(通常取决于接收 机噪声); (2)目标RCS的不确定性和起伏特性; (3)雷达系统本身可能存在的各种损耗; (4)地球表面或大气传播。
《雷达信号分析》PPT课件

2
t 2 dt
三、单载频矩形脉冲信号: 2 2 T 2
3
26
§3.4 信号的非线性相位特性
对测量精度的影响
(t) 0,具有非线性相位。
时间相位常数: 2 t ' (t)a2 (t)dt 2 t ' (t) u(t) 2 dt
2
[a(t)] dt
u(t) 2 dt
2
2 0
2E N0
1 [1
(
0
)2 ]
2
2 0
1
2E [1 (
N0
0
)2 ]
结论:① ②
27
例1: u(t) rect( t )e jkt2
T
t T
(t ) k t 2 ' (t ) 2k t
2
t ' (t)a 2 (t)dt
2
T /2
t(2kt)dt
T / 2
2kT2
2
[a(t)] dt
20
经过推导有:
Sr (t)
[t
2v t
]e
j
2f0 [t
2vt C
]
C
[t ]e j 2f0 e j 2 ( f0 fd )t
1
2v , C
fd
2v C
f0
2v
运动目标的影响:① 压缩/展宽;②多普勒偏差。
考虑到 1, f0 f有d :
S r (t) [t ]e j 2 ( f0 fd )(t )
4
7 相干脉冲串信号
7.1相干脉冲串信号 7.2 均匀脉冲串信号的频谱 7.3 均匀脉冲串信号的模糊函数 *7.4 均匀脉冲串信号的性能 *7.5 均匀脉冲串信号的处理方法 *7.6 其它形式脉冲串信号简介
《雷达导引头概论》读书笔记思维导图PPT模板下载
5.3 指令形成
0 1
5.1.1 常 规检测
0 2
5.1.2 恒 虚警检测
0 3
5.1.3 预 定检测
0 4
5.1.4 高 分辨检测
0 6
5.1.6 积 累检测
0 5
5.1.5 识 别检测
5.2.1 速度信息 5.2.2 距离信息
5.2.3 角度信息 5.2.4 仿形处理
5.3.2 制导指令
5.3.1 管理指令
06 第6章 主动导引头
目录
07 第7章 半主动导引头
08 第8章 被动导引头
09 第9章 复合导引头
010 第10章 系统设计
011 第11章 分系统技术
012 第12章 试验技术
目录
013 附录A 缩略术语汇总 表
015 参考文献
014
附录B 物理量符号汇 总表
本书介绍雷达导引头的基本体制和相关技术,全书共12章,内容包括概述、目标、环境、信号与噪声、导引 头基本功能、主动导引头、半主动导引头、被动导引头、复合导引头、系统设计、分系统技术和试验技术。本书 可作为从事雷达导引头研制工作的工程技术人员和高等院校相应专业师生的参考书。
11.3.6 信道化 接收机
11.3.5 锁相接 收机
11.3.7数字化接 收机
11.4.1 功能与技 术要求
11.4.2 硬件结构
11.4.3 软件流程
11.4.4 主要子程 序
11.5.1 功能 1
与技术要求
11.5.2 原理 2
框图与主要部 件
3 11.5.3 角预
定回路
4 11.5.4 角稳
10.5.2 可靠 2
性模型
3 10.5.3 可靠
HotZ-雷达原理与系统-第五章 雷达作用距离
第五章雷达作用距离作用距离是雷达的重要性能指标之一,它决定了雷达能在多大的距离上发现目标。
作用距离的大小取决于雷达本身的性能,其中有发射机、接收系统、天线等分机参数,同时又和目标的性质及环境因素有关。
第一节雷达方程雷达作用距离方程,表征雷达作用距离和发射机、接收系统、天线分机参数以及目标的性质、环境因素等的关系距离R 处任一点的雷达发射信号功率密度:考虑到定向天线增益G :§5.1.1 基本雷达方程目标散射截面积设为σ,则其接收的功率为σS 1以目标为圆心,雷达处散射的功率密度:雷达收到功率:Ar:雷达天线接收面积rr雷达接收到的回波功率反比于目标与雷达站间距离R的四次方►收发不同天线时►收发同天线时►收发不同天线时,最大作用距离►收发同天线时,最大作用距离雷达实际作用距离受目标后向散射截面积σ、S imin 、噪声和其他干扰的影响,具有不确定性,服从统计学规律。
当接收功率为接收机最小检测功率S imin时,可得:R max∝λ2►总结:◆雷达方程虽然给出了作用距离和各参数间的定量关系,但由于未考虑设备的实际损耗和环境因素,且目标有效反射面积σ和最小可检测信号S imin不能准确预定,因此仅用来作估算的公式,考察各参数对作用距离的影响。
◆雷达在噪声和其他干扰背景下检测目标,同时,复杂目标的回波信号本身存在起伏,因此,接收机输出的是一个随机量。
雷达作用距离也不是一个确定值而是统计量,通常只在概率意义上讲,当虚警概率(如10-6)和发现概率(如90%)给定时的作用距离是多大。
§5.1.2 目标的雷达截面积►目标的雷达截面积定义:►实际测量:返回接收机每单位立体角内的回波功率在远场条件(平面波照射的条件)下,目标处每单位入射功率密度在接收机处的单位立体角内产生的反射功率乘以4π习题►设目标距离为R0,当标准金属圆球(截面积为σ)置于目标方向离雷达R0/2处时,目标回波的平均强度正好与金属球的回波强度相同,试求目标的雷达横截面积。
目标截面积及其起伏特性讲解

目标截面积及其起伏特性1 点目标特性与波长的关系目标的后向散射特性除与目标本身的性能有关外, 还与视角、 极化和入射波的波长有关。
其中与波长的关系最大, 常以相对于波长的目标尺寸来对目标进行分类。
为了讨论目标后向散射特性与波长的关系, 比较方便的办法是考察一个各向同性的球体。
因为球有最简单的外形, 而且理论上已经获得其截面积的严格解答, 其截面积与视角无关, 因此常用金属球来作为截面积的标准, 用于校正数据和实验测定。
图1 球体截面积与波长λ的关系球体截面积与波长的关系如图1所示。
当球体周长2πr<<λ时, 称为瑞利区, 这时的截面积正比于λ-4; 当波长减小到2πr =λ时,就进入振荡区, 截面积在极限值之间振荡; 2πr>>λ的区域称为光学区, 截面积振荡地趋于某一固定值, 它就是几何光学的投影面积πr 2。
目标的尺寸相对于波长很小时呈现瑞利区散射特性, 即σ∝λ-4。
绝大多数雷达目标都不处在这个区域中, 但气象微粒对常用的雷达波长来说是处在这一区域的(它们的尺寸远小于波长)。
处于瑞利区101.00.10.010.0010.10.20.30.50.8 1.022010853瑞利区振荡区光学区λ2πr πr 2σ球的目标, 决定它们截面积的主要参数是体积而不是形状, 形状不同的影响只作较小的修改即可。
通常,雷达目标的尺寸较云雨微粒要大得多, 因此降低雷达工作频率可减小云雨回波的影响而又不会明显减小正常雷达目标的截面积。
实际上大多数雷达目标都处在光学区。
光学区名称的来源是因为目标尺寸比波长大得多时, 如果目标表面比较光滑, 那么几何光学的原理可以用来确定目标雷达截面积。
按照几何光学的原理, 表面最强的反射区域是对电磁波波前最突出点附近的小的区域, 这个区域的大小与该点的曲率半径ρ成正比。
曲率半径越大,反射区域越大, 这一反射区域在光学中称为“亮斑”。
可以证明, 当物体在“亮斑”附近为旋转对称时, 其截面积为πρ2, 故处于光学区球体的截面积为πr2, 其截面积不随波长λ变化。
第五章雷达图像特性及其判读特点

➢ 假定地面平坦的情况下,可以根据斜距和航高 来确定近似的地面距离。
(二)投影差
➢ 与热红外扫描成像一样,侧视雷达图像的投影 差是一维的,并与航线正交,但其投影差方向 即像点的视差
二、图像色调特征及透视信息
➢ 侧视雷达图像色调深浅反映地物后向散射回波 的弱强。
➢ 地物回波强弱主要影响因素包括地物表面的几 何性质和介电性质。
➢ 地物表面几何性质对雷达回波的影响,取决于 地物表面粗糙度、雷达工作波长和波束照射俯 角三者关系。只有三者恰当配合、相互制约才 会产生较强的回波。
1.覆盖范围大 ➢ 对地面的覆盖范围取决于飞行高度和由近射程
到远射程的俯角。一般在图像比例尺较小、航 高较大的情况下,单个成像条带可长达几百公 里、宽几十公里。比其它航空遥感大很多。 ➢ 雷达图像几何畸变小,很容易镶嵌成图,从而 为区域分析提供了宽广的视域。 ➢ 雷达图像可以放大,以供详细判读。
2.线性形迹增强
➢ 因为当雷达脉冲遇到垂直的地物时,先到达地 物的顶端,后到达其基部。于是从垂直地物的 顶端返回的信号也就先于基部到达天线。这就 会使垂直地物发生上下位移,即像点位移的方 向朝向扫描线上的投影中心。这种上下位移效 应在近距离内表现得尤为突出。
➢ 下图比较这一效应与航空摄影的投影差 。
侧视雷达图像与航空摄影图像 的投影差比较
➢ 透视缩减与上下位移都与雷达盲区现象相关。
➢ 背向雷达天线的坡面所接收的信号很弱,或者 根本没有信号接收。
➢ 地物A的右侧背向飞机,其坡度又小于俯角, 因而还能得到雷达脉冲的照射。但这种脉冲照 射非常轻微,回波也就很弱,图像比较阴暗。
目标微动特性

目标微动特性研究进展庄钊文,刘永祥,黎 湘(国防科技大学电子科学与工程学院,湖南长沙410073) 摘 要: 目标特征控制技术的发展增加了目标探测与识别任务的技术难度.随着先进传感器的测量能力和信号处理水平的提高,对目标微动特性的测量和分析正在成为当前目标探测与识别领域的新兴研究方向.本文在目标微动的概念、目标微动对电磁波的调制效应、目标微动特征处理与分析技术进展、目标微动特性应用领域等方面做了比较深入的介绍和分析,最后对目标微动特性研究的发展趋势和技术难点进行了预测.关键词: 微动;微多普勒;雷达目标;时频信号处理中图分类号: T N95 文献标识码: A 文章编号: 037222112(2007)0320520206The Achievements of Target Characteristic with Micro 2MotionZH UANG Zhao 2wen ,LI U Y ong 2xiang ,LI X iang(School o f Electronic Science and Engineering ,National Univer sity o f De fense Technology ,Changsha ,Hunan 410073,China )Abstract : Technical progresses in controlling of target characteristic play the challenge to the tasks of target measurement and recognition.With the development of advanced sensors and time 2frequency signal processing ,some advancement in target micro 2motion measurement and feature analysis gain more and more attentions in the field of target measurement and recognition.In this paper ,some topics related to target characteristic with micro 2motion are introduced and analyzed ,such as the basic concept of micro 2motion dynamics ,the mechanism of modulation on electromagnetic wave induced by target with micro 2motion ,progresses in feature analysis of target with micro 2motion ,and the applied fields based on micro 2motion dynamics.Some directions of further work in tar 2get characteristic with micro 2motion and their technical difficulties are predicted at last.K ey words : micro 2motion ;micro 2Doppler ;radar target ;time 2frequency signal processing1 引言 近年来,目标特征控制技术,如隐身、伪装等方面获得了快速发展,对目标探测与识别提出了更高的技术要求.随着先进传感器的测量能力和时频信号处理水平的提高,对目标细节的描述和刻画,尤其是目标运动状态的精细刻画已成为一个新的技术热点.近一个时期,目标微动特性在目标探测与识别领域的重要价值开始引起国内外学术界和工程界的关注.本文将介绍在目标微动特性测量和特征分析方面取得的主要技术进展,分析其应用前景和发展趋势.2 目标微动及其雷达特征概述 目标微动目前还没有一个严格的定义,一般将目标或目标部件除质心平动以外的振动、转动和加速运动等微小运动统称为微动(M icro 2m otion ,M icro 2dynam ics )[1].微动在自然界普遍存在,如人的行走,桥梁的振动,天线的转动,电动机的转动,直升机旋翼的转动,中段弹头的进动等[2].在雷达观测条件下,微动的范围描述可以进一步推广,将目标或目标部件在雷达视线方向上的小幅(相对于目标与雷达的径向距离)非匀速运动或运动分量统称为微动.对于点目标,微动表现为运动的非匀速性;对于扩展刚体目标,微动表现为目标各部分的不同运动状态;对于扩展非刚体目标/分布式目标,微动表现为多目标或目标各部件之间的不同运动形式.可以说,目标微动表征了目标运动状态的细节.目标微动状态下对电磁波的调制效应主要包括多普勒特征、回波功率调制特征以及成像特征等.从多普勒效应来看,若点目标径向存在非匀速运动,则多普勒频移是时变的,表现在频谱上就是存在频谱旁瓣或展宽;对于非刚体运动目标,目标各部件的不同运动状态也会使其回波频谱存在频谱旁瓣或展宽,这种现象称为微多普勒效应(M icro 2D oppler E ffect )[2],也称为时频像(T ime 2frequency Profile ),描述微动引起的瞬时多普勒效收稿日期:2006206220;修回日期:2006211203基金项目:国家自然科学基金项目(N o.60402032)第3期2007年3月电 子 学 报ACT A E LECTRONICA SINICA V ol.35 N o.3M arch 2007应.微多普勒是从频率上描述了目标微动的雷达特征,反映了多普勒频移的瞬时特性,表征了目标微动的瞬时径向速度.在微多普勒的基础上,相继提出了微多普勒率和多普勒谱等概念,其中微多普勒率反映了多普勒变化率的瞬时特性,表征目标微动瞬时径向加速度;多普勒谱则体现了多普勒在时间和空间的积累,表征一定观测时间内目标各部件微动径向速度的分布.目标微动的雷达回波功率调制特征,主要体现为RCS时间序列,表征目标的姿态变化引起的RCS起伏.目标微动的成像特征,主要指目标雷达成像以及利用雷达像能够获得的结构、尺寸和运动特征,具体包括:结构特征—转动或振动中心,称为微动结构;尺寸特征—转动半径或振动幅度,称为微动尺寸;运动特征—转动频率或振动频率,称为微动频率等.根据目标微动对电磁波的调制效应分析可知,利用先进的时频信号处理手段,可以从微动目标的雷达回波中提取和估计目标微动信息.一般的,微动点目标的电磁回波包含了点目标的速度信息.对于扩展刚体目标,RCS调制序列反映了目标姿态的变化,而目标姿态变化是由微动规律决定的,由此可以根据微动目标的RCS时间序列反演微动规律.在微动目标的成像方面,可以综合利用多个时刻微动目标的成像结果估计目标的微动结构、微动尺寸和微动频率.3 目标微动特征的分析与处理技术 微动本质上是一种非匀速运动或非刚体运动,目标微动特征信号具有非线性和非平稳的特点,因此目标微动特征分析和处理的核心问题是时变信号处理,主要包括以下技术和方法:时频分析技术,时频分析技术是目标微动特征分析和处理中使用最广泛的技术,其着眼于真实信号组成成份的时变谱特征,通过构造时间和频率的密度函数,将信号以二维的时间2频率密度函数形式表示出来,以揭示信号中所包含的频率分量及其演化特性.已用于微多普勒信号分析和处理的时频分析技术包括W igner2Ville分布,G abor变换,小波分析技术和自适应时频分析技术等.独立成分析技术,时域和空域联合独立成分析技术将目标微动特征信号分解成独立的基函数的线性组合,每个基函数对应一种微动特性,组合系数表征了空时微多普勒特征.例如经验模式分解技术(Em pirical M ode Decom position,E M D)就是将目标微动特征信号频率调制模式分解成不同的调制模式的叠加.匹配傅立叶变换技术,若已知微多普勒信号的形式,可根据先验信息设计对应的指数基函数代替傅立叶变换基函数,将微多普勒信号进行分解,这种技术可称为匹配傅立叶变换技术.例如对于正弦振动激励的微多普勒信号,可用正弦调制指数基函数分析.参数搜索技术,若目标微动可用多项式运动规律表示,如匀加速运动或多阶运动等,则可用运动参数搜索技术,本质上仍然是一种基函数展开技术,将特征信号表示成多项式相位信号之和,使用遗传算法等搜索技术,通过最优匹配理论搜索运动参数.4 目标微动特征的研究现状及其应用领域 多普勒现象敏感于工作频率,微动和微多普勒的概念首先是从相干激光雷达系统中引出,随着现代信号处理技术特别是时频分析技术发展,使得微多普勒现象在雷达中也可实际观测到,自2000年起,陆续出现了关于雷达目标微动特征和微多普勒信号分析抽的报道.411 空间目标探测与识别中的微动特征典型的弹道导弹飞行过程如图1所示,弹道导弹从发射到攻击一般经历弹箭分离、诱饵释放、惯性飞行以及再入等特征事件,由于弹箭分离以及诱饵释放时对弹头的横向干扰,弹头在中段和再入段飞行过程中存在微动[3].从美国导弹防御系统雷达技术及目标识别的发展进程看(如图2),20世纪80年代至今基于运动特征的分辨算法是研究重点,超宽带雷达的微动测量和基于带宽外推技术的微动特征提取尤其是值得关注的焦点[4].125第 3 期庄钊文:目标微动特性研究进展 文献披露,洛克希德・马丁相干技术公司在激光雷达领域处于世界领先地位,研究与开发相干探测成像传感器,实现微多普勒成像(M icro 2D oppler Imaging ),并利用成像序列估计目标的运动状态[5].马克资源公司自20世纪70年代开始研究使用雷达测量分辨弹头和诱饵,称为雷达目标运动分辨(T arget M otion Resolution ,T MR ),也称为相位导数测距(Phase Derived Range ,PDR )或多普勒时间密度(D oppler T ime Intensity ,DTI )处理,可以得到目标的轨道特征、速度与加速度特征(再入时的减速特性)以及微动特征(如弹头的自旋、进动、章动以及抖动等),微动特征是中段目标特性的重要方面,可望为目标识别难题提供新的解决手段[6].美国导弹防御局2004年资助了一项“S 波段雷达微多谱勒特征用于弹道导弹识别”的创新研究,使得宙斯盾防御系统的AN/SPY 21相控阵S 波段雷达能利用微多谱勒特征识别威胁目标[7].1990年3月29日和10月20日美国进行了两次Firefly 试验,验证利用微动特性进行弹道导弹中段真假目标识别的可行性.试验过程中,诱饵装在存储罐中,自旋弹出后膨胀成2米的锥体气球,可控锥体气球模拟了几种不同的进动过程,如图3,利用Firepond 激光雷达对整个过程进行了观测,激光成像雷达成功的观测到700km 以外的诱饵过程,并估计出了目标运动参数[8].波音公司开展了基于微多普勒的非合作目标识别与分类研究,开发的微多普勒激光雷达系统已经在新概念技术演示计划的精确瞄准与识别中投入实用,其机载样机在毛伊岛空间监测基地已经进行了试验测试[9].312 空中目标探测与识别中的微动特征当雷达观测直升机、螺旋桨飞机、喷气式飞机等空中目标时,在一定的姿态角范围内由于飞机旋转运动部件对雷达回波的调制,雷达回波往往含有周期性调制成分.例如对于喷气引擎飞机,雷达信号的调制现象来自于喷气发动机压缩叶片的旋转,表现出活动部件的周期调制谱线对应着引擎的旋转频率.美国陆军研究实验室使用92G H z 连续毫米波雷达对M i 224“雌鹿”D 型直升机进行了微多普勒测量,分析了直升机目标的多普勒频谱构成,包括喷气发动机的调制效应(Jet Engine M odulation ,J E M )、主旋翼和尾旋翼的多普勒谱等,并测量了不同视角的微多普勒特征[10].M arple 使用X 波段雷达测量了荷兰BO 2105双引擎直升机,并利用时频分析技术从回波信号中提取了主旋翼和尾旋翼的微多普勒成分,在信噪比相差70dB 的动态信号范围内有效提取出微多普勒成分,这为直升机的探测和识别提供了新的有效的途径[11].波音公司开发了多功能光学系统试验台,包括微多普勒相干探测激光雷达、中波和长波红外摄像仪、可视CC D 摄像仪等,测试表明相干探测激光雷达可以通过测量飞机发动机的振动特征来识别目标.在微多普勒特征提取方面,其分辨率可以达到0.3H z ,对X 波段雷达其微径向速度分辨力能够达到5mm/s 量级,这对稀薄大气层内各类飞行器的检测、分辨、跟踪与识别是极为有用的特征[12].313 地面目标探测与识别中的微动特征微动特性提供了一种新的研究目标特性的手段,例如汽车引擎产生的振动可以从汽车表面探测到,根据表面振动形成的微多普勒特征可以分辨坦克与汽车,甚至可根据微多普勒特征估计引擎转速来进一步确认发动机类型.“辐射亡命徒”先期技术演示计划(Radiant Outlaw AT D )已经演示了综合利用形状和振动微多普勒处理可靠地识别舰船目标,地面目标外场测量表明微多普勒提取技术对于地面车辆目标识别也具有非常重要的意义[13].美国的联合监视目标攻击雷达系统(Joint ST ARS )利用了S AR 和G MTI 雷达双模式工作,即利用S AR 成像发现静止目标,利用G MTI 发现敌方的运动目标,再利用精细的雷达目标微动特征分辨,对地面坦克、装甲车、移动导弹发射架、人员和动物等进行探测与识别[14].225 电 子 学 报2007年 得克萨斯大学奥斯汀分校设计和制造了微多普勒数据采集雷达,研究微多普勒特征提取及目标识别.雷达工作频率从4G H z ~10G H z 可调,为零差频(H om o 2dyne )I/Q 双通道探测模式.该雷达提取了行人步法产生的微多普勒率,为分析非刚体目标的微多普勒和其它复杂目标多散射现象提供了条件[15].在图6中可以看出,躯体(胸膛)多普勒频移近似为常量,手臂的微多普勒频移近似为正弦形式,并且可以估计出摆臂频率约1.2Hz.新加坡南洋理工大学使用经验模式分解(Em pirical M ode Decom position ,E M D )技术提取出了静止卡车发动机的微多普勒特征[16],实验中雷达置于距目标10米处,工作频率为100~900MH z ,实验表明当雷达工作在低载频时,微多普勒处于±30H z 附近,如图7,乔治亚理工学院使用X 波段零差频雷达,通过分析有大型车辆通过桥梁时的微多普勒特征,获取桥梁的共振频率信息,预测桥梁寿命.依据载重、货物布置和吸振装置不同,拖车的自然共振频率约为1~5H z [17].另外,雷达探测仪照射人体时,回波信号包含了人体运动调制的多普勒频率[18],在X 段人体呼吸所产生的多普勒频率大约在0.12~1H z 范围内,通过检测多普勒频率就能够提取出人体的生命参数(如呼吸或心跳),该技术可用于地震、雪灾等情况下生命定位探测等.325第 3 期庄钊文:目标微动特性研究进展5 雷达目标微动特性研究的发展趋势 雷达目标的微动特征通过微时间(M icro2tem poral)、微距离(M icro2range)和微频率(M icro2frequency)的概念,展示了时间2空间2频率三维特征空间的变化特性[11],在此三维特征空间中,微多普勒/多普勒谱、高分辨距离像、IS AR像/S AR像可以分别视为时间2频率像(T ime2 frequency Profile)、时间2距离像(T ime2range Profile)和距离2多普勒像(Range2D oppler Profile),是雷达目标三维特征空间的切片.目标微动特征反映了目标的电磁散射特性、几何结构特性和运动特性,为雷达目标探测和识别提供了新的途径.雷达目标微动特征提取是运动学与雷达信号处理交叉结合的一个新兴的研究方向,涉及运动建模,时频分析,变采样滤波,雷达成像理论和技术等,随着研究的不断深入,预计将在以下方面取得有价值的研究成果:(1)建立完善的雷达目标微动特征体系.目前,国外对雷达目标微动特征的分析和研究还主要集中在点目标微多普勒方面,在微动对电磁波的调制效应分析方面还未见系统的阐述,并且对微多普勒分析尚未形成统一的方法.通过建立完善的雷达目标微动特征体系,从频率、功率、极化、成像等方面描述雷达目标微动特性,将会为雷达目标的探测和识别提供新的途径.(2)建立系统的微多普勒提取技术.微多普勒是估计目标微动参数的前提,其关键在于瞬时频率的高精度估计,需要重点突破具有高时频分辨能力的时频分布及其高效计算.另外,目前研究主要集中在基于微多普勒的单目标微动特性分析,而基于多种微多普勒分量的多目标微动特性分析尚不多见,这对于微动目标分辨,包括刚体目标的多种运动成分分辨、非刚体目标的运动组件分辨、运动目标群的分辨等问题具有重要意义,为目标的精细描述提供技术基础.(3)具备稳健的目标微动成像能力.高分辨雷达已成为目标特性测量的主要手段,雷达目标的微动成像主要包括刚体/非刚体目标复杂运动状态下的IS AR成像,尤其对于目标各部件具有不同的平动和转动速度的非刚体目标IS AR成像,为微动目标的结构特性描述提供基础.目标微动成像能力的技术难点是不同的散射中心运动规律和不同的散射中心强度分布,存在复杂的时间、频率和距离的耦合,如多普勒效应就是时间量与频率量之间的复杂耦合,其解决途径是时2频解耦,具体而言,对于距离像要获得零多普勒纵向像估计,对方位像要获得零微多普勒横向像估计.(4)初步解决目标微动识别难题.从国外的研究进展分析,微动特性被视为目标独一无二的特征,在目标识别方面有独到的优势.为解决目标微动识别问题,需要探索目标微动特性与目标物性参数的关系,如目标质量分布特征、惯量比特征、发动机特征等,为实现可靠的目标识别提供基础.另外,需要解决目标微动探测与识别系统开发中的实用化问题,面向系统的任务和功能,基于目标微动特性分析有针对性的开展相关技术方案的设计和实现.参考文献:[1]Chen V C,Li F,Ho S,Wechsler H.Micro2doppler effect inradar2phenomenon,model and simulation Study[J].IEEE Trans on AES,2006,42(1):2-21.[2]Chen V C.Micro2Doppler effect of micro2motion dynamics:areview[A].Proceedings of SPIE on Independent Component Analyses,Wavelets,and Neural Networks[C].Orlando,USA: SPIE Press,2003.240-249.[3]Nunn E C.The US army white sands missile range develop2ment of target motion resolution[A].Proceedings of IEEE Electronics and Aerospace Systems Conventions[C].Arlington, USA:IEEE Press,1980.346-352.[4]Camp W W,Mayhan J T,O’Donnell R M.Wideband radar forballistic missile defense and range Doppler imaging of satellites [J].Lincoln Laboratory J ournal,2000,12(2):267-280. [5]Hannon S M,Thomson J A.Agile multiple pulse coherent ladarfor range and micro2Doppler measurement[A].Proceedings of SPIE on Laser Radar Technology and ApplicationsⅢ[C].Or2 lando,USA:SPIE Press,1998.259-269.[6]Rihaczek A W,Hershkowitz S J.Radar Resolution and Com2plex2Image Analysis[M].Boston:Artech House,1996.24-155.[7]S2band radar micro2Doppler signatures for BMD discrimination[DB/OL]./osbp/sbir/solicitations/ sbir044/mda044.htm,2003210216/2004208224.[8]Hanson F,Beaghler G.Discriminating interceptor technologyprogram laser radar[A].Proceedings of SPIE on Laser Radar Technology and Applications[C].Orlando,USA:SPIE Press, 1999.372-380.[9]Swirski Y,Wolowelsky K.Detection and delineation of build2ings from airborne ladar measurements[A].Proceedings of SPIE on Applications of Digital Image Processing XXVII[C].Orlando,USA:SPIE Press,2004.149-156.[10]Nalecz M,Andrianik R R,Wojtkiewicz A.Micro2Doppleranalysis of signal received by FMCW radar[A].Proceedingsof International Radar Symposium[C].Dresden,Germany:IEEE Press,2003.231-235.[11]Marple S L.Sharpening and bandwidth extrapolation tech2niques for radar micro2Doppler feature extraction[A].Pro2 ceedings of International Conference on Radar[C].Adelaide,Australia:IEEE Press,2003.166-170.425 电 子 学 报2007年[12]Alfred B G,William E K.Development of coherent laser radarat Lincoln Laboratory[J].Lincoln Laboratory J ournal,2000, 12(2):383-396.[13]Wellman R J,Silvious J L.Doppler signature measurements ofa Mi224Hind2D Helicopter at92GHz[R].Adelphi,USA:AirResearch Laboratory,1998.[14]Barbaross S.Doppler2rate filtering for detecting moving targetswith synthetic aperture radars[A].Proceedings of the SPIE on Millimeter Wave and Synthetic Aperture Radar[C].Orlando, USA:SPIE Press,1989.140-147.[15]Ling H.Exploitation of micro2Doppler and multiple scatteringphenomena for radar target recognition[R].Austin,USA:The University of Texas at Austin,2004.[16]Cai C J,Liu W X,Fu J S.Empirical mode decomposition ofmicro2Doppler signature[A].Proceedings of International Conference on Radar[C].Washington,USA:IEEE Press, 2005.895-899.[17]Greneker E F,Geisheimer J L,Asbell D.Extraction of micro2Doppler data from vehicle targets at x2band frequencies[A].Proceedings of SPIE on Radar Sensor Technique[C].Orlan2 do,USA:SPIE Press,2001.1-9.[18]Chen K,Huang Y,and Zhang J.Microwave life detection sys2tems for searching human subjects under earthquake rubble or behind barrier[J].IEEE Trans on Biomedical Engineering, 2000,27(1):1052-1064.作者简介:庄钊文 男,1958年出生于福建泉州,工学博士,国防科学技术大学教授,博士生导师,中国电子学会会士.主要从事智能信号处理、自动目标识别、卫星导航定位等领域的研究工作.E2mail:zhaowenzhuang@.cn刘永祥 男,1976年出生于河北唐山,工学博士,国防科学技术大学副教授,中国电子学会高级会员.主要从事信息融合、雷达目标识别等领域的研究工作.E2mail:lyx-bible@.cn黎 湘 男,1967年出生于湖南长沙,工学博士,国防科学技术大学教授,博士生导师,中国电子学会高级会员.主要从事精确制导、信息融合、目标识别等领域的研究工作.E2mail:xiangli@525第 3 期庄钊文:目标微动特性研究进展。
雷达原理介绍
基本原理
发射系统 目标 接收系统
将雷达的接收信号与发射信号进行比较,就可 以获得目标的位置、速度、形状等信息,根据这些 信息,雷达进而可以完成对目标的检测、跟踪、识 别等任务。
基本原理
发射信号:
Tp Tr t
雷达发射周期性脉冲,记脉冲宽度为 Tp,重复周期为 Tr,雷达峰值功率(即脉冲期间的平均功率)为Pt,雷达 平均功率(即周期内的平均功率)为Pav,工作比(即脉冲 宽度与重复周期之比)为D。显然有: D = Tp / Tr = Pt / Pav ≤ 1 当雷达发射信号是连续波时,其工作比D = 1。
雷达原理介绍
2012年7月16日
定义与任务
雷达,英文Radar的音译,源于Radio Detection and Ranging的缩写,原意是“无线电 探测和测距”,即用无线电方法发现目标并测 定它们的空间位置。随着雷达技术的发展,雷 达的种类越来越多,不同雷达的功能范围也从 单纯的测量目标位置扩展到测量目标速度,甚 至测量目标的尺寸、形状、表面粗糙度及介电 特性等。
发射功率
不考虑各种损耗,影响目标回波峰值功率Ps的因素有: 雷达发射峰值功率Pt、目标的雷达截面积(RCS) 、目 标与雷达的相对距离R。它们之间存在关系: Ps= Pt /R4 是与雷达系统及环境有关的常数。若 过小或R过大,则 接收信噪比SNR会过低,从而可能导致无法发现目标:
?
可见,正交解调处理将信号的中心频率降低了 f0 。
|s( f )|
s(t)
sm(t)
0 |sm( f )|
正交解 调前
exp(-j2 f0t)
f0
正交解 调后
f
0
f
脉冲压缩
如前所述,元器件发展水平使得不能仅以增加发射机 功率Pt来提高接收信号SNR,同时,太高的发射功率也使 得己方雷达容易被敌方发现并摧毁。于是产生了各种复杂 的信号包络,具有这种信号形式的雷达以相对较低的功率
组网雷达中旋转目标微多普勒效应分析及三维微动特征提取

组网雷达中旋转目标微多普勒效应分析及三维微动特征提取李东伟;罗迎;张群;李天鹏【摘要】目标微动特征提取是当前研究的一个热点,在组网雷达技术中研究了旋转目标的徼多普勒效应,分别分析了组网雷达中不同信号形式下的目标微多普勒效应,并给出了其参数化表达.利用组网雷达的多视角特性,将不同信号形式下分布在不同位置的雷达获得的回波信号进行参数提取,通过构造多元非线性方程组,以提取的参数作为变量,进行目标3维微动参数解算,实现了目标3维微动特征的提取.仿真实验验证了所提算法的有效性.%The micro - motion feature extraction for micro - motion target has attracted great attention in recent years. The micro - Doppler (m - D) effect of rotating target is introduced in the netted radar techniques in the paper. The m - D effects are separately analyzed and the parameterized expressions are deduced in the netted radars that transmit different forms of signals. Making use of the multi - view of netted radar, the parameters of the radars different forms of echo signals those come from different locations are extracted, the three - dimensional micro -motion features are obtained by solving nonlinear multivariable equation systems. Simulation results validate the effectiveness of the proposed algorithm.【期刊名称】《空军工程大学学报(自然科学版)》【年(卷),期】2012(013)003【总页数】6页(P45-49,90)【关键词】组网雷达;微多普勒;三维微动特征;旋转目标【作者】李东伟;罗迎;张群;李天鹏【作者单位】空军工程大学防空反导学院,陕西三原,713800;空军工程大学信息与导航学院,陕西西安,710077;空军工程大学信息与导航学院,陕西西安,710077;空军工程大学防空反导学院,陕西三原,713800【正文语种】中文【中图分类】TN957随着电子技术的迅猛发展,雷达对抗愈演愈烈,空袭与防空已不再是单种兵器的对抗,而是空袭体系与防空体系的对抗,组网雷达[1]应运而生。
雷达原理(第三版)--丁鹭飞第5章PPT课件

为
P
P2
4
S1
4
据此, 又可定义雷达截面积σ为
4返回接收 入机 射每 功角 单 率内 位 密的 立 度回 体波功率
σ定义为, 在远场条件(平面波照射的条件)下, 目标处每单位入射 功率密度在接收机处每单位立体角内产生的反射功率乘以4π。
.
9
第 5 章 雷达作用距离
为了进一步了解σ的意义, 我们按照定义来考虑一个具有良好导 电性能的各向同性的球体截面积。 设目标处入射功率密度为S1, 球目标的几何投影面积为A1, 则目标所截获的功率为S1A1。 由于 该球是导电良好且各向同性的, 因而它将截获的功率S1A1全部均 匀地辐射到4π立体角内, 根据式(5.1.10),可定义
输出噪声功率通常是在接收机检波器之前测量。大多数接收机 中, 噪声带宽Bn由中放决定, 其数值与中频的3dB带宽相接近。 理想接收机的输入噪声功率Ni为
Ni kT0Bn
.
15
第 5 章 雷达作用距离
故噪声系数Fn亦可写成
Fn
(S/ N)i (S/ N)o
输入信噪比 输出端信噪比
(5.2.1)
将上式整理后得到输入信号功率Si的表示式为
Et Pt 0 Ptdt
代替脉冲功率Pt, 用检测因子Do= (S/N)o min替换雷达距离方程 (5.2.6)式时, 即可得到。
用检测因子Do表示的雷达方程为
R m a x (4)2 E k tG 0 tF A T n r D 0 C B L 1 /4 ( 4P )t3 k G t0 G F T r n D 0 2 C B L 1 /4(5.2.7)
S N omin=Do
匹配 接收机
检波器
检波后 积累
雷达基本工作原理ppt课件

天线
回波 T/R
触发器
接收机
电源
船电
显示器
回波 船首线 方位
精品课件
12
3 雷达相关技术参数
1. 波长λ
S 波段 X 波段
10cm波长 2000~4000MHz 7.5~15cm 3050MHz
3cm波长 8000~12500MHz 2.4~3.75cm 9375MHz 。
天气好: X band; 天气坏(雨/雪) : S band
方位标志
固定距标圈 荧光屏边缘
精品课件
10
1.4 雷达的测距与测向原理
1. 雷达测距原理
Δt: 往返于天线与目标的时间,
C: 电 磁 波 在 空 间 传 播 速 度
3×108m/s。
R
=
1 C
×Δ
t
2
2. 雷达测向原理 借助于定向天线 - 扫描.
精品课件
11
2 雷达基本组成
微波传输线 发射脉冲
发射机
长脉冲 →窄范围的频谱 △f ↑→ 噪声↑→灵敏度↓→ 失真↓ △f ↓→ 噪声↓→ 灵敏度↑→ 失真↑ 兼顾: 远量程 △f ↓→ 灵敏度↑
近量程 △f ↑→ 灵敏度↓ 航海雷达 1~25 MHz
精品课件
15
3 雷达相关技术参数
8.天线增益
定向天线最大辐射方向的功率与点状天线各向均匀辐射的平均功率之比。
目标
4
雷达目标
雷达所能发现的所有目标。
▪ 船舶 ▪ 岛屿(陆地) ▪ 浮标 ▪ 海浪杂波 ▪ 雨雪杂波
精品课件
5
目标信息
相对位置(距离和方位) 真速度 真航向 CPA(Closest Point of Approach) TCPA(Distance to CPA)