纹理特征计算
gee sentinel 纹理特征
gee sentinel 纹理特征1. 介绍地球引擎(Google Earth Engine,简称GEE)是一个用于分析地球观测数据的云平台。
Sentinel系列是欧空局(ESA)推出的一组卫星,提供了高质量、高分辨率的地球观测数据。
在GEE中,可以利用Sentinel卫星数据进行纹理特征分析。
纹理特征是指图像中像素之间的空间关系和变化。
通过对纹理特征的分析,可以提取出图像中不同区域的纹理信息,并进一步应用于土地覆盖分类、城市建设规划等领域。
本文将介绍如何使用GEE平台和Sentinel卫星数据进行纹理特征分析,并展示一些常用的纹理特征指标和应用案例。
2. GEE平台介绍GEE是一个基于云计算的平台,提供了丰富的地球观测数据集、强大的计算能力和易于使用的编程接口。
用户可以在GEE平台上进行遥感影像处理、空间分析、机器学习等操作。
GEE平台中包含了大量公开可用的遥感影像数据集,其中包括Sentinel系列卫星获取到的多时相、多波段的遥感影像数据。
这些数据集可以通过GEE平台提供的API进行访问和处理。
3. Sentinel卫星数据Sentinel系列卫星由欧洲空间局(ESA)运营,提供了高质量、高分辨率的地球观测数据。
Sentinel-2卫星搭载了多光谱传感器,可以获取到10米至60米的分辨率的遥感影像数据。
用户可以通过GEE平台访问和处理Sentinel-2卫星数据。
在GEE中,Sentinel-2卫星数据以图像集(Image Collection)的形式存在,每个图像集包含了一系列时相的遥感影像。
4. 纹理特征分析纹理特征是指图像中像素之间的空间关系和变化。
通过对纹理特征的分析,可以获取到图像中不同区域的纹理信息。
常用的纹理特征分析方法包括灰度共生矩阵(GLCM)、局部二值模式(LBP)等。
在GEE中,可以利用Sentinel卫星数据进行纹理特征分析。
首先需要选择一个感兴趣区域(Region of Interest),然后从相应的Sentinel-2图像集中提取出该区域内的遥感影像。
一种新的纹理特征提取算法
2011年1月第16卷第1期西 安 邮 电 学 院 学 报JOU RN A L OF XI .AN U N IV ERSIT Y OF PO ST S AN D T EL ECOM M U NICA T IO N S Jan.2011V ol 116N o 11收稿日期:2010-11-16作者简介:闫晶莹(1985-),女,硕士研究生,研究方向:图像检索,E -mail:y iy 2336@;王成儒(1945-),男,教授,研究方向:图像处理、模式识别等。
一种新的纹理特征提取算法闫晶莹,王成儒(燕山大学信息科学与工程学院,河北秦皇岛 066004)摘要:为了提高纹理特征提取的效率,提出一种基于傅里叶变换的纹理特征提取算法。
该算法先将图像进行傅里叶变换,然后把图像傅里叶域分割为12个扇形区域,提取扇形区域中的纹理特征,并使用Caneberr a 距离函数计算两幅图像的相似度。
与现有算法相比,本算法对纹理特征提取具有较高的效率和准确率。
关键词:傅里叶变换;纹理特征;小波变换中图分类号:T P391.41 文献标识码:A 文章编号:1007-3264(2011)01-0049-04基于内容的图像检索在过去的二十多年来已经成为一个日益活跃的研究领域,在这个时期已经研发出一些实验和商业用的图像检索系统,如基于内容的图像检索(Co ntent -based Image Retriev al,CBIR)系统。
在CBIR 系统中,图像数据库使用是来自图像底层特征的图像视觉内容包括颜色、纹理、形状或者几种底层特征组合。
由于纹理特征描述了很多实际的自然图像(云,水,树林,医学图片)和非自然图像(砖块,织布和建筑),所以在基于内容的图像检索系统中,纹理特征提取起着重要的作用[1]。
提取纹理特征的算法很多,在早期的纹理分析研究中主要使用的是基于统计或者结构的方法提取纹理特征,如灰度共生矩阵法、直方图法[2]等。
近几年,各种变换被用于纹理特征的提取算法,最常使用的是变换包括傅里叶变换[3,4]、小波变换[5-8]和Gabo r 变换[9]等。
颜色、形状、纹理特征提取算法及应用wtt

颜⾊、形状、纹理特征提取算法及应⽤wtt ⼀、颜⾊特征1 颜⾊空间1.1 RGB 颜⾊空间是⼀种根据⼈眼对不同波长的红、绿、蓝光做出锥状体细胞的敏感度描述的基础彩⾊模式,R 、G 、B 分别为图像红、绿、蓝的亮度值,⼤⼩限定在 0~1 或者在0~255。
1.2 HIS 颜⾊空间是指颜⾊的⾊调、亮度和饱和度,H 表⽰⾊调,描述颜⾊的属性,如黄、红、绿,⽤⾓度 0~360度来表⽰;S 是饱和度,即纯⾊程度的量度,反映彩⾊的浓淡,如深红、浅红,⼤⼩限定在 0~1;I 是亮度,反映可见光对⼈眼刺激的程度,它表征彩⾊各波长的总能量,⼤⼩限定在 0~1。
1.3 HSV 颜⾊模型HSV 颜⾊模型依据⼈类对于⾊泽、明暗和⾊调的直观感觉来定义颜⾊, 其中H(Hue)代表⾊度, S (Saturat i on)代表⾊饱和度,V (V alue)代表亮度, 该颜⾊系统⽐RGB 系统更接近于⼈们的经验和对彩⾊的感知, 因⽽被⼴泛应⽤于计算机视觉领域。
已知RGB 颜⾊模型, 令M A X = max {R , G , B },M IN =m in{R , G ,B }, 分别为RGB 颜⾊模型中R 、 G 、 B 三分量的最⼤和最⼩值, RGB 颜⾊模型到HSV颜⾊模型的转换公式为:S =(M A X - M IN)/M A XH =60*(G- B)/(M A X - M IN) R = M A X120+ 60*(B – R)/(M A X - M IN) G= M A X240+ 60*(R – G)/(M A X - M IN) B = M A XV = M A X2 颜⾊特征提取算法2.1 ⼀般直⽅图法颜⾊直⽅图是最基本的颜⾊特征表⽰⽅法,它反映的是图像中颜⾊的组成分布,即出现了哪些颜⾊以及各种颜⾊出现的概率。
其函数表达式如下:H(k)= k n N(k=0,1,…,L-1) (1) 其中,k 代表图像的特征取值,L 是特征可取值的个数, k n 是图像中具有特征值为 k 的象素的个数,N 是图像象素的总数。
纹理特征——精选推荐

纹理特征纹理是⼀种反映图像中同质现象的视觉特征,它体现了物体表⾯的具有缓慢变化或者周期性变化的表⾯结构组织排列属性。
纹理具有三⼤标志:某种局部序列性不断重复;⾮随机排列;纹理区域内⼤致为均匀的统⼀体。
纹理通过像素及其周围空间邻域的灰度分布来表现,即局部纹理信息。
局部纹理信息不同程度的重复性,即全局纹理信息。
⼀幅图像的纹理是在图像计算中经过量化的图像特征。
图像纹理描述图像或其中⼩块区域的空间颜⾊分布和光强分布。
纹理特征可以分为四种类型:(1)统计型纹理特征基于像元及其邻域内的灰度属性,研究纹理区域中的统计特征,或者像元及其邻域内灰度的⼀阶、⼆阶或者⾼阶统计特征。
统计型纹理特征中以GLCM(灰度共⽣矩阵)为主,它是建⽴在估计图像的⼆阶组合条件概率密度基础上的⼀种⽅法。
对于⼀幅图像定义⼀个⽅向(orientation)和⼀个以pixel为单位的步长(step),灰度共⽣矩阵T(N×N),则定义M(i,j)为灰度级为i和j的像素同时出现在⼀个点和沿所定义的⽅向跨度步长的点上的频率。
其中N是灰度级划分数⽬。
由于共⽣矩阵有⽅向和步长的组合定义,⽽决定频率的⼀个因素是对矩阵有贡献的像素数⽬,⽽这个数⽬要⽐总共数⽬少,且随着步长的增加⽽减少。
因此所得到的共⽣矩阵是⼀个稀疏矩阵,所以灰度级划分N 常常减少到8级。
如在⽔平⽅向上计算左右⽅向上像素的共⽣矩阵,则为对称共⽣矩阵。
类似的,如果仅考虑当前像素单⽅向(左或右)上的像素,则称为⾮对称共⽣矩阵。
尽管GLCM提取的纹理特征具有较好的鉴别能⼒,但是这个⽅法在计算上是昂贵的,尤其是对于像素级的纹理分类更具有局限性。
(2)模型型纹理特征假设纹理是以某种参数控制的分布模型⽅式形成的,从纹理图像的实现来估计计算模型参数,以参数为特征或采⽤某种策略进⾏图像分割。
模型型纹理特征提取⽅法以随机场⽅法和分形⽅法为主。
随机场模型⽅法:试图以概率模型来描述纹理的随机过程,它们对随机数据或随机特征进⾏统计运算,进⽽估计纹理模型的参数,然后对⼀系列的模型参数进⾏聚类,形成和纹理类型数⼀致的模型参数。
基于灰度共生矩阵(GLCM)的图像纹理分析与提取

基于灰度共生矩阵(GLCM)的图像纹理分析与提取重磅干货,第一时间送达灰度共生矩阵灰度共生矩阵(Gray Level CO-Occurrence Matrix-GLCM)是图像特征分析与提取的重要方法之一,在纹理分析、特征分类、图像质量评价灯方面都有很重要的应用,其基本原理图示如下:左侧是一个图像,可以看出最小的灰度级别是1,最大的灰度级别是8,共有8个灰度级别。
右侧对应的灰度共生矩阵,左上角第一行与第一列的坐标(1, 1)包含值1,原因在于水平方向上,相距一个像素值,当前像素跟水平右侧相邻像素只有一个是1、1相邻的像素值(灰度级别)对;右侧共生矩阵的原始(1, 2) = 2 说明在像素矩阵中有两个像素值1,2相邻的像素点对、以此类推得到完整的右侧灰度共生矩阵。
根据当前像素跟相邻像素位置不同,可以计算得到不同的共生矩阵,同时根据像素之间的距离不同会输出不同灰度共生矩阵。
总结来说,有如下四种不同角度的灰度共生矩阵:•0度水平方向GLCM•45度方向GLCM•90度垂直方向GLCM•135度方向GLCM根据相邻像素点之间距离参数D不同可以得到不同距离的GLCM。
此外对正常的灰度图像来说,最小灰度值为0,最大的灰度值为255,共计256个灰度级别,所以GLCM的大小为256x256,但是我们可以对灰度级别进行降维操作,比如可以每8个灰度值表示一个level这样,这样原来256x256大小的共生矩阵就可以改成256/8 * 256 /8 = 32x32的共生矩阵。
所以最终影响灰度共生矩阵生成有三个关键参数:•角度 (支持0、45、90、135)•距离(大于等于1个像素单位)•灰度级别(最大GLCM=256 x 56)GLCM实现纹理特征计算灰度共生矩阵支持如下纹理特征计算,它们是:•能量•熵值•对比度•相关性•逆分差这些纹理特征计算公式如下:上述5个是常见的GLCM的纹理特征,GLCM总计由14个特征值输出,这里就不再赘述了!感兴趣的可以自己搜索关键字GLCM。
场景图像中纹理特征的表达与计算研究
场景图像中纹理特征的表达与计算研究作者:朱樱来源:《商情》2017年第16期【摘要】纹理特征是从纹理图像中计算出来的一个值,他对纹理内部灰度级变化的特征进行量化。
本次设计利用统计法中的灰度共生矩阵统计方法,对图像的熵、能量、惯性矩、相关性四个纹理特征进行提取;和利用灰度直方图方法计算图像的平均值、方差、熵和能量。
【关键词】图像纹理共生矩阵灰度直方图熵能量一、课题研究的背景随着科技的快速发展,图像越来越成为人类生活和工作中用于传递信息和进行交流的重要数据载体,图像的有效表示是进一步处理图像的重要基础。
用各种观察系统取得的图像很多都是纹理型的,可以通过图像的纹理分析提取许多有价值的宏观信息。
纹理反映了物体表面或结构的性质。
类似于布纹、草地、砖墙等重复性结构的图像称为纹理图像。
直觉上,纹理是比较明显的,但是由于纹理的变化很多并且是与心理效果相关的,很难精确描述。
纹理特征包含了物体表面结构排列的重要信息以及它们与周围环境的联系。
正因为如此,纹理特征在基于内容的场景图像检索、场景图像识别中得到了广泛的应用。
二、系统的框架设计2.1文件操作模块将指定位图文件的数据读入到相应的数据结构中,以便进一步处理,该模块主要是对图像进行打开操作。
用文件操作获得一个图片对象。
用bufferedimage接受这个文件,并用图片的属性宽和高来判断此文件是否为图片文件,若添加的文件宽和高为0,则不是图片格式,此时会提示重新添加。
2.2特征值计算模块2.2.1基于灰度共生矩阵分析方法计算特征值Step1:将原图转换为灰度图像获得图像中一点的像素值,使用bufferedimage.getRGB(i,j)获得该点的颜色值ARGB,然后再将ARGB转化为RGB。
进而求出R,G,B三分量的值。
根据灰度公式:Gray=(R*30+G*59+B*11+50)/100可以计算出灰度值,从而将原图转换为灰度图像。
Step2:灰度级量化灰度图像的灰度级为256,在计算由灰度共生矩阵推导出的纹理特征时,要求图像的灰度级远小于256,主要是因为矩阵维数较大而窗口的尺寸较小则灰度共生矩阵不能很好表示纹理,如要能够很好表示纹理则要求窗口尺寸较大,这样使计算量大大增加,而且当窗口尺寸较大时对于每类的边界区域误识率较大。
csdn matlab提取纹理特征算法
matlab提取纹理特征算法详解在Matlab中提取纹理特征通常涉及使用各种图像处理和计算机视觉技术。
以下是一个简单的纹理特征提取算法的步骤和示例代码,以获取图像的纹理信息。
请注意,这只是一个基本示例,实际应用中可能需要更复杂的方法。
1. 灰度化首先,将彩色图像转换为灰度图像,以简化处理:```matlabimg = imread('your_image.jpg');gray_img = rgb2gray(img);```2. 纹理特征提取使用局部二值模式(Local Binary Pattern, LBP)作为一种常见的纹理特征提取方法。
LBP计算每个像素点周围的局部二值模式,并将其编码为一个整数。
在Matlab中,可以使用`extractLBPFeatures`函数:```matlablbp_features = extractLBPFeatures(gray_img);```3. 纹理特征分析根据实际问题,你可能需要对提取的纹理特征进行分析。
例如,可以使用直方图来观察纹理特征的分布:```matlabhistogram(lbp_features);title('LBP Features Histogram');```完整示例代码```matlab% 读取图像并灰度化img = imread('your_image.jpg');gray_img = rgb2gray(img);% 提取纹理特征lbp_features = extractLBPFeatures(gray_img);% 分析纹理特征histogram(lbp_features);title('LBP Features Histogram');```请注意,这只是一个简单的示例,实际上有很多其他纹理特征提取方法,如灰度共生矩阵(Gray Level Co-occurrence Matrix, GLCM)、Gabor滤波器等。
纹理特征分析的灰度共生矩阵(GLCM)

纹理特征分析的灰度共⽣矩阵(GLCM)纹理分析是对图像灰度(浓淡)空间分布模式的提取和分析。
纹理分析在遥感图像、X射线照⽚、细胞图像判读和处理⽅⾯有⼴泛的应⽤。
关于纹理,还没有⼀个统⼀的数学模型。
它起源于表征纺织品表⾯性质的纹理概念,可以⽤来描述任何物质组成成分的排列情况,例如医学上X 射线照⽚中的肺纹理、⾎管纹理、航天(或航空)地形照⽚中的岩性纹理等。
图像处理中的视觉纹理通常理解为某种基本模式(⾊调基元)的重复排列。
因此描述⼀种纹理包括确定组成纹理的⾊调基元和确定⾊调基元间的相互关系。
纹理是⼀种区域特性,因此与区域的⼤⼩和形状有关。
两种纹理模式之间的边界,可以通过观察纹理度量是否发⽣显著改变来确定。
纹理是物体结构的反映,分析纹理可以得到图像中物体的重要信息,是、和分类识别的重要⼿段。
对于空间域图像或变换域图像(见),可以⽤统计和结构两种⽅法进⾏纹理分析。
统计纹理分析寻找刻划纹理的数字特征,⽤这些特征或同时结合其他⾮纹理特征对图像中的区域(⽽不是单个像素)进⾏分类。
图像局部区域的⾃相关函数、灰度共⽣矩阵、灰度游程以及灰度分布的各种统计量,是常⽤的数字纹理特征。
如灰度共⽣矩阵⽤灰度的空间分布表征纹理。
由于粗纹理的灰度分布随距离的变化⽐细纹理缓慢得多,因此⼆者有完全不同的灰度共⽣矩阵。
结构纹理分析研究组成纹理的基元和它们的排列规则。
基元可以是⼀个像素的灰度、也可以是具有特定性质的连通的像素集合。
基元的排列规则常⽤来描述。
英⽂名称 Texture Analysis;学术解释 指通过⼀定的图像处理技术提取出纹理特征参数,从⽽获得纹理的定量或定性描述的处理过程.纹理分析⽅法按其性质⽽⾔,可分为两⼤类:统计分析⽅法和结构分析⽅法学术定义 纹理是⼀种普遍存在的视觉现象,⽬前对于纹理的精确定义还未形成统⼀认识,多根据应⽤需要做出不同定义. 定义1 按⼀定规则对元素(elements)或基元(primitives)进⾏排列所形成的重复模式. 定义2 如果图像函数的⼀组局部属性是恒定的,或者是缓变的,或者是近似周期性的,则图象中的对应区域具有恒定的纹理.作⽤分析 对这种表⾯纹理的研究称为纹理分析.它在计算机视觉领域有着重要的应⽤. 在机械⼯程中对机械零件加⼯表⾯的这种凹凸不平性开展研究同样具有重要的实践意义。
纹理特征提取方法
纹理xx 方法发展1973年,Haralick在利用陆地卫星图像研究美国加利福尼亚海岸带的土地利用问题时,开创性地提出著名的GLCM它在纹理分析中是一个很好的方法,广泛用于将灰度值转化为纹理信息。
此外,这个阶段出现的方法主要还有灰度行程长度法、灰度差分统计法,自回归模型法等,这些方法在纹理分类中有一定效果,但是这些方法的后继研究很少,在实际应用中也较少采用从20世纪80年代以来,MRF理论在纹理分析中掀起一阵热潮..,为纹理特征提取找到了一个新的方向,尔后相继出现了MRF模型、Gibbs模型、高斯马尔可夫随机场(GMRF模型、同步自回归模型(SAR)隐马尔可夫随机场模型(HMRF)广义MRF模型和多分辨率MRF等等。
同时,分形理论也为提取纹理特征注入了新的活力。
1984年,Pentland等人在这方面做了开创性的工作,指出分形模型非常适用于描述纹理图像。
后来更多学者将分形用于纹理分类,以分数维来描述图像区域的纹理特征。
其中引人瞩目的是Chaudhuri和Sarker提出了差分计盒算法,这是一种简单、快速、精度高的分形维数计算方法。
也是目前用得较多的一种方法。
随后,Kapan等提出了非常吸引人的扩展分形特征。
90 年代以后随着小波理论的发展,小波在纹理特征提取中的应用也不断发展。
近年来,较引人瞩目的是ojala等于2002年提出的局部二进制模式(LBP,该方法分析纹理的吸引人的地方在于其计算复杂度小,具有多尺度特性和旋转不变特性,在纹理检索领域得到应用。
纹理是图像分析中常用的概念,指的是图像像素的灰度或者颜色的某种变化。
纹理特征,这里指得是利用计算机技术从数字图像中计算出来的可以定量描述人对纹理的定性的感知的某些参数,它对区域内部灰度变化或者色彩变化的某种规律进行量化,这些纹理特征能够尽可能地缩小纹理的类内差距,同时尽可能增大纹理的类间差距方法分类1.统计家族(基于像元及其邻域的灰度属性,研究纹理区域中的统计特性,或像元及其邻域内的灰度的一阶、二阶或高阶统计特性)(1)GLCM(灰度共生矩阵):该方法是建立在估计图像的二阶组合条件概率密度基础上(2)半方差:该方法是一种基于变差函数的方法,由于变差函数反映图像数据的随机性和结构性。
纹理特征公式
纹理特征公式纹理特征是计算机视觉和图像处理中的一个重要概念,它描述了图像中像素或区域的模式、结构或重复性图案。
在图像处理和分析中,提取并使用纹理特征对于各种任务至关重要,如分类、识别、检索和增强等。
本文将介绍纹理特征的公式定义,以及其在不同领域的应用。
一、纹理特征的公式定义纹理特征通常通过数学公式来描述,这些公式可以捕捉到图像中像素或区域之间的模式和关系。
以下是一些常见的纹理特征公式:1. 灰度共生矩阵(GLCM):GLCM描述了像素对在特定方向和距离上的灰度级相关性。
它包含了四个主要的特征:对比度、相关性、能量和熵。
2. 灰度游程矩阵(GLRM):GLRM描述了像素的灰度级在行或列方向上的连续性。
它可以通过计算像素连续出现的频率来描述纹理的方向性和周期性。
3. 小波变换(WT):小波变换是一种时频分析方法,可以用于提取图像中的纹理特征。
它可以将图像分解成不同频率和方向的部分,然后通过分析这些部分的系数来描述纹理特征。
4. 傅里叶变换(FFT):傅里叶变换可以将图像从空间域转换到频率域,从而通过分析频率成分来描述纹理特征。
二、纹理特征的应用纹理特征在许多领域都有广泛的应用,以下是几个例子:1. 图像分类:通过提取图像中的纹理特征,可以对图像进行分类。
例如,可以利用纹理特征将不同类型的材料、表面或场景进行区分。
2. 目标检测:在安全监控、自动驾驶等领域,目标检测是一项关键任务。
通过提取目标的纹理特征,可以有效地识别和定位目标。
3. 遥感图像分析:遥感图像通常包含丰富的纹理信息,通过提取和分析这些纹理特征,可以用于土地覆盖分类、环境监测、城市规划等领域。
4. 医学影像分析:在医学影像中,不同的组织往往具有独特的纹理特征。
通过提取和分析这些特征,可以用于疾病诊断和治疗方案的制定。
5. 增强现实:在增强现实应用中,纹理特征可以帮助识别和跟踪物体,从而实现更精确的虚拟物体与真实场景的融合。
总结纹理特征是图像处理和分析中的重要工具,通过提取和分析这些特征,可以实现各种应用。
纹理特征
纹理特征纹理是指存在于图像中某一范围内的形状很小的、半周期性或有规律地排列的图案。
在图像判读中使用纹理表示图像的均匀、细致、粗糙等现象。
纹理是图像处理和模式识别的主要特征之一。
纹理特征是指图像灰度等级的变化,这种变化是与空间统计相关的。
图像的纹理特征反应了图像本身的属性,有助于图像的区分。
一般的图片都具有丰富、稳定的纹理特征,且利用统计方法方法提取图像的纹理特征具有计算量小的特点。
a.统计法a)灰度共生矩阵假定,在一幅图像中规定了一个方向(水平的、垂直的等)和一个距离(一个象素,两个象素等)。
那么该物体的共生矩阵P 的第(i,j )个元素值等于灰度级i 和j 在物体内沿该方向相距该指定距离的两个像素上同时出现的次数,除以M ,其中M 是对P 有贡献的像素对的总数。
矩阵P 是N ×N 的,其中N 为灰度阴影级的划分数目。
各个共生矩阵可以通过对距离和方向的各个组合来定义。
对矩阵有贡献的像素对的总数M ,比物体内部像素的个数少,而且这个数目随着距离的增加逐渐减少。
因此,小物体的矩阵会相当稀疏。
由于这个原因,灰度级划分N 常常被减少,例如从256级到8级,以便于共生矩阵的计算。
在水平方向上的共生矩阵,如果考虑当前像素的左右方向上的像素,则称为对称共生矩阵,如果只考虑当前像素的右或左方向上的像素,则称为非对称共生矩阵。
例如,设一幅图像的大小为M ×N ,灰度级为L ,G ={0,1,2……., L-1},f(x,y)是坐标(x,y)处像素的灰度级,一幅图像的一个共生矩阵是一个L ×L 矩阵L L ij t T *][,T 中的元素是图像灰度的空间关系,以及按特定方式表示的两灰度间变化的次数。
我们只考虑水平方向的共生矩阵,则对称共生矩阵的定义如下:∑∑===M i Nj ij k l t 00),(δ (3-2)式中⎩⎨⎧=-==+=jk l f i k l f jk l f i k l f )1,(,),()1,(,),( ;1),(=k l δ (3-3) 否则 0),(=k l δ (3-4) 当只考虑水平方向的右边的像素,则非对称共生矩阵的定义如下:j k l f i k l f =+=)1,(,),( ;1),(=k l δ (3-5)否则 ;0),(=k l δ (3-6)我们得到从灰度级i 到j 变化的概率如下:∑∑-=-==101L i L i ijijij tt p (3-7)b) TamuraTamura 以人类的主观心理度量作为标准,提出了六个基本的纹理特征,这些特征包括:粗糙度(coarseness ),对比度(contrast ),方向度(directionality ),线像度(linelikeness ),规整度(regularity )和粗糙度(roughness ),这些特征中最重要的主要是纹理的粗糙度,对比度和方向度。
纹理特征——精选推荐
纹理特征第⼀章绪论1.1研究背景随着计算机技术的迅速发展以及机器视觉系统在通信、宇宙探测、遥感、⽣物医学等领域的应⽤,纹理图像分析技术越来越成为视觉领域研究的热点话题。
在⽇常⽣活中,图像随处可见,我们所接受的所有信息的80%是来⾃视觉信息,可见图像信息在我们⽇常⽣活中的重要性。
图像的特征主要包括颜⾊特征、纹理特征和形状特征。
相⽐于颜⾊特征和形状特征,图像的纹理特征包含了图像的许多信息,通过对其分析可以得到更好的宏观和微观信息,所以在图像分析中,纹理的特征分析越来越受到⼈们青睐。
因此,越来越多的国内外学者致⼒于图像纹理特征提取的研究。
纹理特征提取技术作为数字图像处理领域中的⼀种新的应⽤,在军事、医学和计算机科学等众多领域,都⼴泛地采⽤了这⼀技术。
(1). ⽆⼈飞⾏器的⾃主导航与定位利⽤存放在飞⾏器上的参考图像,与其在飞⾏过程中获得的下视或前下视、图像进⾏⽐较,从⽽判断⽆⼈飞⾏器的当前位置,确定其飞⾏⽅向和位置上的偏差[1-3]。
(2)遥感测量从20世纪90年代以来,随着遥感技术的提⾼,⾼分辨率的遥感影像越来越多,遥感可以在较⼩的空间范围内观察地表的细节变化,进⾏⼤⽐例尺遥感制图、提取⾼精度的地理信息、监测⼈为活动对环境的影响等。
借助对遥感图像的纹理分析、提取影响的纹理特征,可以推进影响解译的⾃动化[1]。
在遥感图像中,不同地形地貌对应着遥感图像中不同的纹理图像,平原、⼭地、丘陵、村庄、⽔域、⽥地等不同地貌可以通过纹理区分开来。
(3)医疗辅助诊断从严格意义上说,在引⼊线代医疗仪器前,医学基本上不能称为科、学。
传的医疗诊断靠的是经验。
事实上即使在今天中医也基本上依靠经验。
这样就带来了两⽅⾯的问题,⼀是医⽣的训练⽆法科学化,⽽是诊断的结果加⼊了较多的⼈为因素。
现代医疗仪器的使⽤在⼀定程度上解决了这两⽅⾯的问题,但仪器除了直接提供数据外,⼏乎不能进⾏任何⾃动分析⼯作,很多仪器如X-光机、CT、B 超、各种显微诊断设备等提供的都是图像,这样诊断的结论⼜⼀次依赖于读者经验。
图像纹理特征的提取

图像纹理特征的提取摘要纹理是图像中一个重要而又难以描述的特性,它们反映了物体表面要色和灰度的某种变化,只有采取有效的描述纹理特性的方法才能去分析纹理区域与纹理图像。
如何有效地提取纹理特征一直是数字图像处理领域的热点话题,而各种提取方法也层出不穷。
本文简单介绍3种提取的方法及其算法的比较。
关键词纹理特征;灰度共生矩阵;Gabor滤波;自回归模型0 引言纹理是图像中一个重要而又难以描述的特性,它们反映了物体表面要色和灰度的某种变化。
纹理分析技术一直是计算机视觉、图像处理、图像分析、图像检索等的活跃研究领域。
研究内容的一个最基本的问题是纹理特征提取。
提取的方法可以大致的分为四个家族:统计家族,结构家族,信号处理家族,模型家族。
1 纹理特征的提取方法1.1 基于图像灰度共生矩阵的特征提取1.1.1 灰度共生矩阵共生矩阵用两个位置的象素的联合概率密度来定义,它不仅反映亮度的分布特性,也反映具有同样亮度或接近亮度的象素之间的位置分布特性,是有关图象亮度变化的二阶统计特征。
它是定义一组纹理特征的基础。
一幅图象的灰度共生矩阵能反映出图象灰度关于方向、相邻间隔、变化幅度的综合信息,它是分析图象的局部模式和它们排列规则的基础。
设f(x,y)为一幅二维数字图象,其大小为M×N,灰度级别为Ng,则满足一定空间关系的灰度共生矩阵为:P(i,j)=#{(x1,y1),(x2,y2)∈M×N|f(x1,y1)=i,f(x2,y2)=j}其中,#(x)表示集合x中的元素个数,显然P为Ng×Ng的矩阵,若(x1,y1)与(x2,y2)间距离为d,两者与坐标横轴的夹角为θ,则可以得到各种间距及角度的灰度共生矩阵P(i,j,d,θ)。
1.1.2 统计量在上面灰度共生矩阵的基础上可以定义14个特征向量:二阶矩,对比度,相关性,共生和方差,共生和均值,共生差均值,逆差分距,熵,均匀性,协方差,共生差熵,共生差方差,共生和熵,最大概率。
python灰度共生矩阵提取纹理特征

Python灰度共生矩阵提取纹理特征1.介绍在计算机视觉和图像处理领域,纹理特征是用来描述图像中物体表面细节的重要特征之一。
纹理特征可以提供关于图像物体的结构、形状、纹理、模式等信息。
其中,灰度共生矩阵(Gray Level Co-occurrence Matrix, GLCM)是一种常见的用于提取纹理特征的方法。
2.灰度共生矩阵概述灰度共生矩阵是通过计算图像中不同像素对之间的关系统计信息,来表示图像纹理特征的方法之一。
它的原理是统计图像中某一像素与其相邻指定距离和指定方向的像素对之间的灰度级组合出现的频率。
灰度共生矩阵通常是一个对称的二维矩阵,其维度取决于图像的灰度级数目。
每个矩阵元素表示了对应灰度级组合出现的频率。
常用的灰度共生矩阵特征包括:能量(Energy)、对比度(Contrast)、相关性(Correlation)和熵(Entropy)等。
3.Python中的灰度共生矩阵提取纹理特征Python提供了丰富的图像处理库和工具,用于实现灰度共生矩阵的计算和纹理特征的提取。
下面是使用Python进行灰度共生矩阵和纹理特征提取的基本步骤和代码示例:我们需要加载图像并将其转换为灰度图像,这可以通过使用Python的图像处理库如OpenCV或PIL来实现。
以下是加载图像并转换为灰度图像的示例代码:import cv2# 读取图像image = cv2.imread('image.jpg')# 转换为灰度图像gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)接下来,我们可以使用灰度图像计算灰度共生矩阵,并提取纹理特征。
对于灰度图像的灰度共生矩阵计算,可以使用Python的skimage库或Mahotas库。
以下是计算灰度共生矩阵的示例代码:import numpy as npfrom skimage.feature import greycomatrix, greycoprops# 计算灰度共生矩阵glcm = greycomatrix(gray_image, [1], [0], levels=256, symmetric=True, normed=T rue)# 提取纹理特征 - 能量energy = greycoprops(glcm, 'energy')# 提取纹理特征 - 对比度contrast = greycoprops(glcm, 'contrast')# 提取纹理特征 - 相关性correlation = greycoprops(glcm, 'correlation')# 提取纹理特征 - 熵entropy = greycoprops(glcm, 'homogeneity')我们可以将提取到的纹理特征进行进一步的分析、处理和应用。
纹理因子计算
纹理因子计算
均值(Mean):描述图像的平均亮度,计算公式为均值=灰度共生矩阵中每个像素值的平均值。
方差(Variance):描述图像的亮度变化程度,计算公式为方差=灰度共生矩阵中每个像素值与均值的差的平方和的平均值。
同质性(Homogeneity):描述图像的纹理均匀程度,计算公式为同质性=灰度共生矩阵中每个像素值与中心像素值的差的绝对值的平均值。
对比度(Contrast):描述图像的纹理清晰程度,计算公式为对比度=灰度共生矩阵中每个像素值与中心像素值的差的绝对值的最大值。
差异性(Dissimilarity):描述图像的纹理变化程度,计算公式为差异性=灰度共生矩阵中每个像素值与中心像素值的差的绝对值的总和。
灰度熵(Entropy):描述图像的纹理复杂程度,计算公式为灰度熵=-ΣP(i,j)log2P(i,j),其中P(i,j)表示灰度共生矩阵中像素值为(i,j)的概率。
角二阶矩(Second Moment):描述图像的纹理细腻程度,计算公式为角二阶矩=Σ[(i-j)²P(i,j)],其中i和j分别表示灰度共生矩阵中的行和列,P(i,j)表示灰度共生矩阵中像素值为(i,j)的概率。
相关性(Correlation):描述图像的纹理方向性,计算公式为相关性=Σ[(i-j)P(i,j)]/[(Σ(i-m)²ΣP(i,j)]^(1/2),其中m表示灰度共生矩阵中所有像素值的平均值。
这些纹理因子可以单独或组合使用来描述图像的纹理特征。
在实际应用中,可以根据不同的需求选择不同的纹理因子来进行特征提取和图像分类等任务。
python计算纹理特征
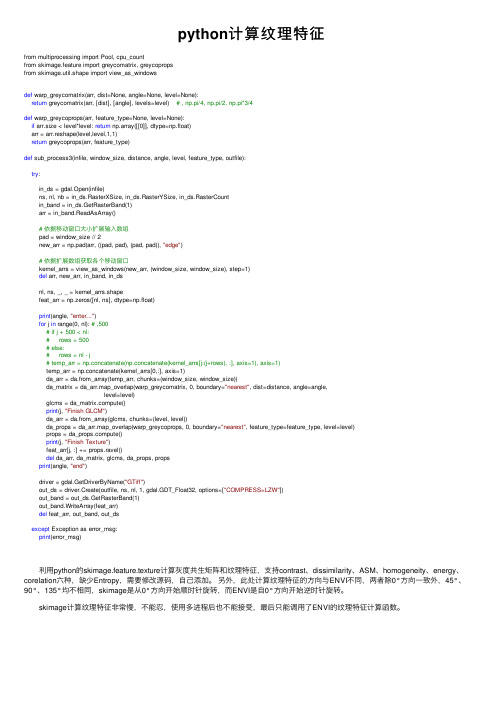
python计算纹理特征from multiprocessing import Pool, cpu_countfrom skimage.feature import greycomatrix, greycopropsfrom skimage.util.shape import view_as_windowsdef warp_greycomatrix(arr, dist=None, angle=None, level=None):return greycomatrix(arr, [dist], [angle], levels=level) # , np.pi/4, np.pi/2, np.pi*3/4def warp_greycoprops(arr, feature_type=None, level=None):if arr.size < level*level: return np.array([[0]], dtype=np.float)arr = arr.reshape(level,level,1,1)return greycoprops(arr, feature_type)def sub_process3(infile, window_size, distance, angle, level, feature_type, outfile):try:in_ds = gdal.Open(infile)ns, nl, nb = in_ds.RasterXSize, in_ds.RasterYSize, in_ds.RasterCountin_band = in_ds.GetRasterBand(1)arr = in_band.ReadAsArray()# 依据移动窗⼝⼤⼩扩展输⼊数组pad = window_size // 2new_arr = np.pad(arr, ((pad, pad), (pad, pad)), "edge")# 依据扩展数组获取各个移动窗⼝kernel_arrs = view_as_windows(new_arr, (window_size, window_size), step=1)del arr, new_arr, in_band, in_dsnl, ns, _, _ = kernel_arrs.shapefeat_arr = np.zeros([nl, ns], dtype=np.float)print(angle, "enter...")for j in range(0, nl): # ,500# if j + 500 < nl:# rows = 500# else:# rows = nl - j# temp_arr = np.concatenate(np.concatenate(kernel_arrs[j:(j+rows), :], axis=1), axis=1)temp_arr = np.concatenate(kernel_arrs[0,:], axis=1)da_arr = da.from_array(temp_arr, chunks=(window_size, window_size))da_matrix = da_arr.map_overlap(warp_greycomatrix, 0, boundary="nearest", dist=distance, angle=angle,level=level)glcms = da_pute()print(j, "Finish GLCM")da_arr = da.from_array(glcms, chunks=(level, level))da_props = da_arr.map_overlap(warp_greycoprops, 0, boundary="nearest", feature_type=feature_type, level=level)props = da_pute()print(j, "Finish Texture")feat_arr[j, :] += props.ravel()del da_arr, da_matrix, glcms, da_props, propsprint(angle, "end")driver = gdal.GetDriverByName("GTiff")out_ds = driver.Create(outfile, ns, nl, 1, gdal.GDT_Float32, options=["COMPRESS=LZW"])out_band = out_ds.GetRasterBand(1)out_band.WriteArray(feat_arr)del feat_arr, out_band, out_dsexcept Exception as error_msg:print(error_msg) 利⽤python的skimage.feature.texture计算灰度共⽣矩阵和纹理特征,⽀持contrast、dissimilarity、ASM、homogeneity、energy、corelation六种,缺少Entropy,需要修改源码,⾃⼰添加。
envi计算纹理特征
envi计算纹理特征
envi计算纹理特征是一种基于遥感图像处理的方法,用于提取地物表面的纹理特征。
该方法利用环境光谱学软件envi中的纹理分析工具,对遥感图像进行处理,从中提取出图像的纹理信息。
具体来说,该方法将遥感图像分成若干个小块,对每个小块进行纹理分析,计算出其纹理特征。
常用的纹理特征包括均值、方差、对比度、相关性等。
通过对这些特征进行统计和分析,可以得到地物表面的纹理信息,进而实现对地物的分类、识别等任务。
envi计算纹理特征具有计算速度快、可扩展性强等优点,因此在遥感图像处理中得到了广泛应用。
- 1 -。
gee 纹理计算
gee 纹理计算
Gee纹理计算是一种用于图形渲染的计算方法,它根据一个或多个纹理图像的像素值来确定最终的颜色输出。
Gee纹理计算的优势在于能够实现更加复杂的纹理效果,例如环境映射、凹凸贴图、反射和折射等等。
Gee纹理计算的核心思想是将纹理图像映射到几何图形表面上,并从每个像素中提取颜色信息。
对于每个需要进行纹理计算的像素,Gee计算引擎会根据该像素在纹理图像中的位置,从纹理图像中读取相应的像素值,并将其与其他像素值进行组合,最终输出一个颜色值。
Gee纹理计算可以通过多种方法实现,例如使用着色器程序、多重纹理层、纹理坐标映射等。
无论使用何种方法,Gee纹理计算都需要快速高效地处理大量像素数据,因此对计算性能要求较高。
总之,Gee纹理计算是计算机图形学中非常重要的一种技术,它可以为现代游戏、电影和虚拟现实等领域提供丰富的视觉效果。
- 1 -。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
lVal1 = pImage[((iRow+iLoopRow)*iPixelSize*iWidth) + ((iCol+iLoopCol)*iPixelSize)];
dTemp += (double) lVal1;
}
}
lSignature[iBlockNum] = sqrt(dTemp);
double dTemp;
int iBlockNum = 0;
long lVal1;
BYTE *pImage;
imageAsli.Load(strNamaFile, CXIMAGE_FORMAT_BMP);
if( !imageAsli.IsValid() ) return 1.0;
{
// Block Processing
lSignature[iBlockNum] = 0.0;
dTemp = 0.0;
for(iLoopRow = 0; iLoopRow < iBlockSize; iLoopRow++ )
{
for(iLoopCol = 0; iLoopCol < iBlockSize; iLoopCol++ )
//
free(lSignature);
strTemp.Format("%.7f - %s", dTemp,strNamaFile);
m_ListFound.AddString(strTemp);
return dTemp;
}
{
lSignature[i] /= dTemp;
}
//
// There are 256 elements for each image. Compare them using Eucliean Distance
// The smaller the value the similiar the image visually
iBlockNum++;
}
}
//
// Normalize 归一化
//
dTemp=0.0;
for(i = 0; i < 256; i++ )
{
dTemp += lSignature[i];
}
for(i = 0; i < 256; i++ )
CSSDlg dlg;
dlg.dEnerg = energy;
dlg.dEntroy = entroy;
dlg.dInerQ = inertiaquadrature;
dlg.dLocalClam = localcalm;
if (IDOK==dlg.DoModal())
{
inertiaquadrature = sqrt((InertiaQuadratureKey - InertiaQuadratureSearch)*
(InertiaQuadratureKey - InertiaQuadratureSearch));
localcalm = sqrt((LocalCalmKey- LocalCalmSearch)*(LocalCalmKey- LocalCalmSearch));
//缩放图片
imageAsli.Resample(iWidth, iHeight);
//变换缩放后的图片的;imageAsli, &imageAsli, &rfft1, &ifft1);
lSignature = (double*) malloc(sizeof(double)*i*j);
if(!energy && !entroy && !inertiaquadrature && !localcalm && EnergyKey)
MessageBox("找到此图片,纹理特征匹配为100%!");
}
}
相似度测量的计算代码如下:
double CXbwDlg::Madhosi(CString strNamaFile)
void CXbwDlg::OnFeatureSimilarity()
{
//根据特征值判断相似度
//基本思想是:在相同的方向选择下,计算各个特征值的欧几里德距离来
// 体现两副图片的纹理特征的差异
double energy = 0.0;
double entroy = 0.0;
double inertiaquadrature = 0.0;
double localcalm = 0.0;
energy = sqrt((EnergyKey - EnergySearch)*(EnergyKey - EnergySearch));
entroy = sqrt((EntropyKey - EntropySearch)*(EntropyKey - EntropySearch));
{
CString strTemp;
CxImage imageAsli;
CxImage rfft1;
CxImage ifft1;
int iWidth = 256;
int iHeight = 256;
int iPixelSize = 1; // 1=GrayScale, 3=24bpp, 4=32bpp
int iBlockSize = 16;
int i = iWidth/iBlockSize;
int j = iHeight/iBlockSize;
int iRow;
int iCol;
int iLoopRow;
int iLoopCol;
double *lSignature;
pImage = rfft1.GetBits();
//计算每幅图像的相似度测量,欧几里德距离
for(iRow = 0; iRow < iHeight; iRow += iBlockSize)
{
for(iCol = 0; iCol < iWidth; iCol += iBlockSize )
//
dTemp = 0.0;
for(i = 0; i < 256; i++ )
{
dTemp += (m_KeySignature[i]-lSignature[i])*(m_KeySignature[i]-lSignature[i]);
}
//
dTemp = sqrt(dTemp);