THB7128芯片应用注意事项
芯片分选机安全操作及保养规程

芯片分选机安全操作及保养规程随着科技的进步,芯片分选机便成为了电子制造业中的一个高效、精准的工具。
然而,由于其特殊的工作原理,使用者必须遵守特定的操作规程和保养细则,以确保设备的正常运行和安全性。
本文着重介绍芯片分选机的安全操作及保养规程。
安全操作1. 保持清洁与干燥芯片分选机内部结构十分复杂,故使用前需保持安装环境干燥清洁,尽量避免水分、灰尘或异物进入设备,以免影响其工作正常。
在设备运行时,不允许吸烟或进食,以免危及人员健康或影响设备性能。
2. 合理使用设备芯片分选机设备是相对脆弱、敏感的,需使用者严格遵照指示手册进行正确使用。
特别要注意,在设备开启时,要按规定扭动设备开关,尽量避免使用过度或暴力操作,以免影响设备正常运作或造成危害。
3. 合理配件安装配件的安装是影响设备使用效果的重要因素之一。
因此,安装配件需在关闭电源的状态下进行,并且在装配时要仔细检查每个部位的紧固度和调整好与设备的配合度。
如安装不正确,容易导致设备无法稳定运行或发生意外事故。
4. 调试前对设备进行检查调试前需首先检查设备所有部位是否固定完好、接线是否正常、电源是否稳定,以确保设备运行立体良好,保证生产过程的正常进行。
如出现任何不正常现象,应及时暂停使用,并呼叫售后服务进行检查和修理,以避免安全隐患。
5. 设立安全防护尤其当芯片分选机使用于工业生产环境时,应加装一些安全防护措施,以防止工作人员操作误伤、机器故障等安全事故的发生。
保养规程1. 定期清洁保养芯片分选机一定要经常保持清洁卫生,应每周进行一次清洁保养,包括清洁设备内部外部、整理线路, 以及及时清理 / 更换滤网等。
保证设备的卫生和通风,以确保设备正常运行。
2. 定期检查配件芯片分选机在工作过程中,各类配件的密封性和紧密度的保养检查也很重要,需定期检查各个配件,如燃烧器、热交换器、进气口等,确保其状态良好,周密维护设备的各项性能指标。
3. 正确使用润滑油芯片分选机的摩擦部位需要强制润滑,定期更换滑油,以确保设备的正常工作。
常用芯片参数

MAX3081 参数符号MIN TYPE MAX 单位 Input High V oltage VIH1 DE, DI, RE, H/ F, TXP , RXP2.0 VInput Low V oltage VIL1 DE, DI, RE, H/ F, TXP , RXP0.8 V SRL Input CurrentIin1DE, DI, RE±2 uA Iin2 H/F, TXP , RXP , internal pulldown10 40Driver Input V oltage (DI).............................-0.3V to (VCC + 0.3V) Driver Output V oltage (A, B, Y , Z)........................................±13V Receiver Input V oltage (A, B) ..............................................±13V Receiver Output V oltage (RO)....................-0.3V to (VCC + 0.3V) Continuous Power Dissipation:8-Pin Plastic DIP (derate 9.09mW/°C above +70°C) ...727mW 8-Pin SO (derate 5.88mW/°C above +70°C)................471mW参数符号 MIN MAX TYPE 单位 工作温度 TA -40 85 °C 输入正向电流 IF20 mA 输入反向电压 VR5 V 输入电流, 低电平 I fl0 250 uA 输入电流, 高电平 I fh7.5 15 mA 低电平选通电压 V el0.8 V 高电平选通电压 VEH2.0 VCC V 高电平输出延迟时间 T plh 100 50 ns 低电平输出延迟时间 T phl 100 60 ns 输入门槛电流 5 3 mA 高电平选通电流 -1.6 -0.7 mA 低电平选通电流-1.6-0.9mA符号参数范围单位Vcc Supply voltage ±16 or 32 VVi Input V oltage -0.3 to +32 V Ptot Power Dissipation N SuffixD Suffix 500400mWVid Differential Input V oltage +32 V Iin Input current 50 mA Toper Operating Free-air Temperature Range 0 to +70 ℃Tstg Storage Temperature Range -65 to +150 ℃LM358参数符号数值单位输入电压Vin -0.3—32 V功耗Pd 570 mWMOC3023参数符号数值(max)type 单位反向电压V r 3 V 正向电流If 60 mA热损耗(室温25℃)Pd 1001.33 mW mW / ℃关断状态终端电压Vdrw 400 V 重复冲击电流峰值Itsm 1 A 通态输出峰值电压Vtm 3 1.8 V 通态输出峰值电流Itm 100 mA LED触发电流Ift 5mAP521—1 P521-2 P521-4参数数值电流传输比50%min输入正向电流70 mA(I F) 50 mA(LED)反向电压5V集电极电流50 mA( Ic )集电极热损耗150mw 100mwrecommend type max 单位电源电压 5 24 V正向电流16 25 mA集电极电流 1 10 mAPC817参数符号数值单位正向电流If 50 mA峰值正向电流Ifm 1 A集电极电流Ic 50 mAUce饱和电压Uce响应时间tr 4-18 us高隔离电压:5000V有效值电磁阀利用Vce-Ic 与If的关系控制三极管的饱和开通或直接控制固态继电器的开关脉冲宽度<=100ms,占空比:0.001Z0409参数符号数值单位峰值门限电流Igm 1.2 A温升Rth 15 ℃/W型号最大电流最大反向电压最大浪涌电压最大反向电流DB102S 1.0 A20 40 0.55 1DB103S 1.0 A30 40 0.55 1DB104S 1.0 A40 40 0.55 1DB105S 1.0 A50 40 0.7 1 1DB106S 1.0 A60 40 0.7 1 178M15参数符号数值type max输出电压V o 15V 15.75V 静态电流Iq 5.2mA 8mA 输出电压温漂 1 Mv/℃输入输出电压差 2 V短路电流Isc 250mA峰值电流Ipk 2.2A7805参数符号数值type max输出电压V o 5V 5.25V 静态电流Iq 5.0mA 8mA 输出电压温漂0.8 Mv/℃输入输出电压差 2 V短路电流Isc 230mA峰值电流Ipk 2.2AHCPL0601参数符号数值(max)min 热损耗P1 45mw每个通道输出电流Io 50mA每个通道输出电压V o 7V输入低电平V el 0.8V 0输入高电平V eh Vcc 2.0V 输入电流If 50mA高电平输出延迟时间Telh 20ns低电平输出延迟时间Tehl 20ns输出电压端上拉电阻Rl 4K 330 低电平输入电流Ifl 0—250uA高电平输入电流Ifh 6.3—15mACBS2—10(LV 25—P)参数符号数值(max)min 总精度Ipn ±12V—15V 0.9%估算阻值±12V ±10mA 30Ω190Ω±12 ±14 30Ω100Ω±15 ±10 100Ω350Ω±15 ±14 100Ω190Ω补偿电流Ip 0.15mA电流大小0—14mA原边电流Ip 10mA副边电流Isn 25mAη 2.5电流转换比例电源电压U0 ±12—15V电压传感器的量程:0—±0.2V、0—±2V、0—±20VTLC5615引脚I/O口描述DIN 1 数据输入SCLK 1 时钟输入CS 1 芯片选择,低电平有效DOUT O 链接传出数据AGND 模拟接地REFIN 1 基准输入OUT O 交直流模拟电压输出Vdd 电源电压参数符号数值(max)min 提供电源电压Vdd 5V输入高电平Vih 2.4V输入低电平Vil 0.8V推荐输出负载Rl Rl 2KRl=10K,输出电压Uout Vcc—0.4 0短路电流Iosc 20mA输出低电平V ol 0.25V输出高电平V oh 4.75VTLP250 maxLED 正向电流 If 20mA LED 短路尖峰电流 Ifpt 1A LED 反向电压 V r 5V 输入门线电流max If 5mA 输入电流 Icc 11mA输出电流 Io ±2.0AHCNR200电流转换比 K321pd pd IIHCNR200:±15% HCNR201:±5% 平均输入电流 If 25mA 尖峰输入电流 If ’40mAK3 Type 都为1 0.85—1.15 0.93—1.07min type max K1 HCNR200 0.25 0.5 0.75 K1 HCNR201 0.36 0.48 0.72 LED 正向电压1.31.61.85THB7128 参数 符号 数值 type 低导通电阻 Ron 0.53Ω 最高耐压 40V DC 峰值电流3.3A管脚说明VREF 电流设定端OSC1斩波频率设定电容连接端M1、M2、M3 细分设置端CW/CCW 正/反转信号输入端 低电平正转 高电平反转 ENBLE 脱机信号控制端 低电平,强制关断,高阻状态 高电平,恢复输出 VM电源VM 连接端 最大工作电压 Vm max 36V 最大输出电流 Io max 3.3A 最大逻辑输入电压6V逻辑输入电压2—6V 5V 数字信号电源 3.3—6V 5V VCC 电源连接端输入低电平时解除待机状态逻辑输入低电平0.8V逻辑输入高电平2V。
机械臂控制系统的设计
机械臂控制系统的设计1 引言近年来;随着制造业在我国的高速发展;工业机器人技术也得到了迅速的发展..根据负载的大小可以将机械臂分为大型、中型、小型三类..大型机械臂主要用于搬运、码垛、装配等负载较重的场合;中小型机械臂主要用于焊接、喷漆、检测等负载较小的场合..随着国外工业机器人技术的不断发展;尤其是一些中小型机器人;它们具有体积小、质量轻、精度高、控制可靠的特点;甚至研发出更为轻巧的控制箱;可以在工作区域随时移动;这样大大方便了工作人员的操作..在工业机器人的应用中最常见的是六自由度的机械臂..它是由6个独立的旋转关节串联形成的一种工业机器人;每个关节都有各自独立的控制系统..2机械臂硬件系统设计2.1 机械臂构型的选择要使机器臂的抓持器能够以准确的位置和姿态移动到给定点;这就要求机器人具有一定数量的自由度..机器臂的自由度是设计的关键参数;其数目应该与所要完成的任务相匹配..为了使安装在双轮自平衡机器人上的机械臂能够具有完善的功能;能够完成复杂的任务;将其自由度数目定为6个;这样抓持器就可以达到空间中的任意位姿;并且不会出现冗余问题..在确定自由度后;就可以合理的布置各关节来分配这些自由度了..由于计算数值解远比封闭解费时;数值解很难用于实时控制;这样;后3个关节就确定了末端执行器的姿态;而前3个关节确定腕关节原点的位置..采用这种方法设计的机械臂可以认为是由定位结构及其后面串联的定向结构或手腕组成的..这样设计出来的机器人都具有封闭解..另外;定位结构都采用简单结构连杆转角为0或90°的形式;连杆长度可以不同;但是连杆偏距都为0;这样的结构会使推倒逆解时计算简单..定位机构是涉及形式主要有以下几种:SCARA型机械臂;直角坐标型机械臂;圆柱坐标型机械臂;极坐标型机械臂;关节坐标型机械臂等..SCARA机械臂是平面关节型;不能满足本文对机械臂周边3维空间任意抓取的要求;直角坐标型机械臂投影面积较大;工作空间小;极坐标方式需要线性移动;机械臂如需较大的工作空间;则臂长较长;和其他类型相比关节型机械臂在其工作空间内干涉是最小的;是一种较为优良的结构..所以初步确定本文机械臂构型为关节型..2.2臂杆长度的确定机械臂的臂杆设计如表2-1所示:表2-1 机械臂臂杆长度臂体名称大臂L1 小臂L2 机械手长度mm 550 500 1502.3 机械臂结构设计2.3.1 关节结构方案为了便于机械臂关节的模块化涉及和简化结构;本设计使用电机直接连接减速器;减速器连接臂体连接结构..图2-1是关节结构动力传递方案..图2-1 关节结构动力传递方案使用这种联接方式因中间零件少;故形变量与回程间隙都较小;且能保持较高的结构刚度..2.4 关键部件的选型2.4.1 关节负载的估算各关节的动态参数是驱动元件的选择和关节传动零件选择的重要依据..由机器人动力学相关知识可知完整的机器人动力学方程为:式中一般使用静力学方法和动力学方法计算机器人的动力参数;速度较低的机械;在运行过程中;惯性引起的动载荷较小;一般使用静力学方法;忽略C和F的影响..而对于运行速度较高机械;其动载荷也较大;即C项的影响较大;甚至超过静载荷;且粘滞摩擦也较大;同时考虑静载荷和动载荷;需使用动力学计算..本文的设计要求是一款可以安装在全向移动平台上的轻型机械臂;对关节的旋转速度要求不高;因此估算机械臂力矩时采用静力学方法..图2-2 机械臂受力简图估计关节力矩之前;首先假设每个关节的重力作用集中在中心;将连杆的重量均分于各关节;机械臂受力简图如图 2-2 所示;使用静力学方法计算关节所受力矩的最大值..六自由度机械臂三维静态仿真图如图2-3所示:图2-3 三维静态仿真图2.4.2 关节驱动系统电机的选型机械臂的驱动系统;有三种基本类型;即电动驱动、液压驱动和气动驱动;也可以根据需要组合成为复合式的驱动系统..1 电机驱动目前机械臂上使用最多的一种驱动方式是电动驱动;它利用各种电机产生的力和力矩;直接或通过机械传动装置来驱动执行机构..这类系统效率比液压驱动和气动驱动系统高;且电源方便;所以在机器人中得到了广泛的应用..2 液压驱动液压驱动的主要优点是功率密度大..液压缸也可直接作为臂体的一部分;因而结构紧凑;刚性好..由于液压油液的不可压缩性;系统的固有频率较高;快速响应好;可实现频繁平稳的变速和换向..液压系统易于实现过载保护;动作平稳、耐冲击、耐振动、防爆性好..3 气动驱动气动驱动系统通常由气缸、气阀、气罐和空压机组成;其特点是气源方便、结构简单、造价较低、维修方便..与液压驱动系统相比;同体积条件下功率较小;也难以进行速度控制;多用于中、小负荷且精度要求不高的机器人控制系统中..综上;本设计决定使用电动驱动方式为机械臂提供动力;步进电机为驱动电机..2.4.3驱动系统减速器的选型结合上文;本文将使用步进电机为驱动电机为机械臂提供动力;结合各关节受力和机械臂关节传动机构组合方式;应在驱动电机和机械臂关节间安装减速器做扭矩适配;降低输出轴的速度;增大输出扭矩..一般行星齿轮减速器、蜗轮蜗杆减速器、谐波减速器、齿轮减速器等可以和步进电机适配..1、行星齿轮减速器行星齿轮减速器通常由一个或者多个外部齿轮围绕着一个中心齿轮旋转;就像行星绕着太阳公转一样..在工作状态中多个行星齿轮协同工作;因而承载能力大;属纯扭矩传动;工作平稳..单级行星齿轮减速器的减速比一般较小;需要增加减速比时只需增加行星轮系的级数即可;而整体体积变化较小..2、蜗轮蜗杆减速器蜗轮蜗杆减速器的传动比大;一般为 10-80;也可以达到 80 以上..此外;蜗轮蜗杆减速器机械结构紧凑、热交换性能好、工作平稳、噪声小、具备机械自锁能力;安全性高..3、谐波减速器波发生器;柔轮;刚轮是谐波减速器的三大部分;谐波齿轮减速器传动结构简单;减速比高;同时啮合的齿数多;运行平稳、传动承载力大;齿侧间隙小;传动精度高;传动误差只有普通圆柱齿轮传动的 1/4 左右;传动空程小;适用于反向转动;在机器人领域有着广泛应用..但对柔轮材料有较高的强度要求;工艺复杂..4、齿轮减速器圆柱齿轮减速机构为定传动比齿轮机构;其传动准确;平稳高效;传动功率范围和速度范围大;广泛用于各种仪器仪表中;但其制造和安装精度要求高;高减速比时结构较为复杂;体积一般较大..综上;初步去确定使用谐波齿轮减速器;减速比大;传动精度高;体积小巧;输入轴与输出轴轴线重合;可很方便地与步进电机组合安装成为机械臂关节的一部分;同时便于机械臂的模块化设计..本文将采用 Harmonic Drive CSF-mini 系列组合型谐波减速器;其中腰关节采用型号为 CSF-14-100-2XH-F;肘关节俯仰和肘关节旋转采用 CSF-11-100-2XHF;腕俯仰采用 CSF-8-100-2XH-F..2.4.4电机驱动器的选型虽然步进电机广泛地应用于各行各业;但步进电机并不能像普通的直流电机那样通过控制输入的等效电压就可以驱动和调速..它必须利用电子电路;将直流电变成分时多相时序控制电流;用这种电流为步进电机供电;步进电机才能正常工作..常见的有单片机 I/O 直接控制;步进电机驱动芯片、运动控制卡..1、单片机 I/O 直接控制方式使用单片机内部的锁存器、计数/定时器;和并行 I/O 接口;可以实现对步进电机的控制;脉冲环形分配器的功能由单片机系统实现完成;通过软件中断方式实现步进电机的变速控制;改变通电顺序则可改变转向..2、步进电机专用驱动芯片步进电机专用驱动芯片一般集成度较高;外围电路简单;一般有 ENABLE、STEP 和 DIR 三个输入端;ENABLE 为使能端;使能有效时方可驱动步进电机;STEP 为脉冲输入;输入一个脉冲;即可驱动步进电机产生微动;DIR 为方向 ;改变 DIR 逻辑电平即可换向..3、运动控制卡驱动控制通过计算机可直接控制步进电机;运动控制卡是专用于步进电机控制的 PC 插卡;是应对复杂系统的控制而出现的;一般可同时控制十几台甚至几十台步进电机的运动;一般价格很高..综上;本设计将使用步进电机专用驱动芯片来驱动步进电机..其中肩关节和肘关节俯仰有自锁需求;使用东芝 THB7128 3A 128 高细分步进电机专用驱动芯片驱动;其他轴选用 A4988 微步驱动器..2.4.5传感器的选型本文将使用步进电机和谐波齿轮减速器为机械臂提供动力;步进电机只需要通控制驱动脉冲的数量;即可简单实现较高精度的定位;并使工作物在精确地停在目标位置..步进电机以细分后的步距角为基本单位进行定位..以两相电机为例;其步距角为1.8°;使用 1/16 细分方式进行驱动;那么每给驱动器一个脉冲步进电机转子旋转的角度为角度=1.8°1/16=0.1125°;转子旋转一周需要脉冲数为360°/0.1125°=3200;需要旋转到其他任意角度的计算方式与上式相同..本文使用限位开关的型号为 Omron 微动开关 SS-5 摆杆型限位开关..2.4.6下位机的选型对于机器臂控制;需要对多台电机进行联动控制..为了实现多台电机之间的通信和控制;必须建立一套数据通信系统来完成主计算机与各运动控制单元间的数据交换..基于现场总线的分布式控制技术能够解决这些问题..但常见的分布式控制系统又有 USB 总线;SERCOS总线;RS-485 总线和 CAN 总线等这几种..本设计将采用RS-485 总线来实现机械臂的分布式控制..本设计选用了TI公司的2000系列 DSP TMS320LF2407 作为控制单元..其时钟频率可达 40MHz;具有高速的处理能力;片内资源丰富;特别是它特有两个内置事件管理器模块EVA、EVB..通过JTAG 接口可以方便的对 DSP 进行全速的在系统调试仿真..TMS320LF2407 的电源电压为 3.3V;正常下作电流为 80m A 左右;抗干扰能力较强..关节控制器硬件电路关节控制器是以 DSP 芯片为核心;芯片本身及其外围电路的性能直接决定了系统的性能..故芯片的选择及其外围电路的设计;也就显得十分的重要..下面将通过单个模块电路的方式分别介绍控制器硬件电路..(1)电源电路通过开关电源;接入B0505LS模块产生稳定的的5V 电压作为TPS7333芯片的供电电压;管脚8做为2407 的上电复位信号..管角 5;6 通过滤波电容输出作为 2407 的供电电压3.3V..如图2-5..图2-4 电源电路(2)时钟电路TMS320LF2407 的时钟源可以来自外部有源晶振也可以用晶体;利用内部振荡器..一般经常使用外部时钟输入;因为使用外部时钟时;时钟的精度高、信号比较稳定;外部时钟电路和锁相环电路如图 2-6 所示..图2-5 时钟电路(3)JTAG 接口电路仿真接口电路如图2-7所示.目标层次的TI调试标准使用5个标准的IEEE1149.1JTAG信号TRST、TCK、TMS、TDI、TDO和两个TI扩展口EMU0、EMU1..JTAG 目标器件通过专用的仿真端口支持仿真;此端口由仿真器直接访问并提供仿真功能..JTAG 接口电路为仿真器与微机的接口电路;便于系统进行在线调试..图2-6 JTAG电路(4)外接SRAM电路TMS320LF2407最多可寻址64K的外部程序空间和64K的外部数据空间..由于控制算法的需要;本系统需扩充外部 RAM..TMS320LF2407片内的 Flash可用作程序存储器;但在开发阶段使用 Flash 作为程序存储器极为不便;因为每一次程序的修改都需要对 Flash 进行清除、擦除和编程操作;而且进行CCS 调试时只能设置硬件断点;故从调试的角度考虑;应扩充程序 RAM..这里用的是CY7C1021V33芯片;它是64K16bit的SRAM;存取时间为15ns;故不需要插入等待周期;可保证系统全速运行..图 2-8 为外接 SRAM 扩展电路图..图2-7 SRAM扩展电路图(5)编码器处理电路增量式编码器信号处理电路如图2-9所示..图 2-8 增量式编码器信号处理电路(6)霍尔接近开关电路本设计选用 A31443E 常开型霍尔接近开关..其接法如图 2-10;提供电压为5V;由于输出采用了集电极开路门;必须通过 10K 的上拉电阻接到 5V 电源上..当磁源的某一极与霍尔传感器的距离达到一定范围以内时;输出低电平;否则输出高电平;不需要外接放大电路..一套关节控制器将采用 3 支霍尔接近开关..HALL1、HALL2 分别固定在关节控制器运动的极限位置;其信号通过 IOPE5、IOPE6 不断查询..HALL3 用于绝对零位检测;采用中断的方式..图2-9 霍尔接近开关的接法2.5 机械臂的模块化设计机械臂的大小臂体和关节在整个机械臂中具有高度的相似性;同时机械臂是机电一体化的典型;其主体结构和联接结构都有一定的复杂性;而采用模块化设计思想;可以一定程度上简化设计流程;只需对不同的应用对象进行少量修改便可完成组合适配..2.5.1 旋转关节的设计机械臂的基本单元有旋转关节和俯仰关节;其结构具有相似性;本文重点介绍旋转关节的设计..旋转关节包含有电机、减速器、编码器、制动器以及其他附件;本文使用步进电机直连谐波减速器的驱动方式;使用限位微动开关确定机械臂初始定位零点;以计步进电机已发脉冲数为关节相对旋转角度参考;是一个开环的运动控制系统;动力传递链路为:电机--波发生器--柔轮--刚轮—输出轴..机械臂的旋转关节模块在运行过程中会受到来自机械臂末端的弯矩;因此需要对输出轴做轴向和径向卸荷;减少输出轴的负载;保证系统的刚度;延长使用寿命..一般来说;一根轴需要两个支点;每个支点由一个或一个以上的轴承组成;每组轴承间有以下三种常用的配置方法..1、双支点各单向固定这种轴承配置常用两个反向安装的圆锥滚子轴承或角接触球轴承;两个轴承各限制轴向一个方向的轴向移动..这种配置方式轴向移动限制比较精确、也便于调整轴承的预紧程度..另外深沟球轴承也可用于双支点各单向固定;通过调整外壳与轴承端盖端面的厚度来补偿轴的受热伸长;因而这种配置方式不适合需要对轴做精确轴向定位的场合..2、一支点双向固定;另一端支点游动对于热伸长量较大的轴;这种轴一般跨距较大且工作温度较高;应该采用一支点双向固定;另一支点游动的支撑结构..其双向固定端需要使用能承受双向轴向载荷的轴承;内外圈都需要固定..3、两端游动支撑对于人字齿轮轴;由于本身具有相互间的轴向限位作用;其中只需保证一根轴与机座有相对固定的轴向位置;另一根轴上的两个轴承必须游动;防止人字齿轮卡死或两侧受力不均匀..本文将采用一支点双向固定;另一端支点游动的方式组合成卸荷轴承组;其中双向固定端使用深沟球轴承;游动端使用滚针轴承..其中腰关节使用型号为 HRB 61809-2Z、SKF HK5020;肘关节旋转使用型号为 HRB 61806-2Z、SKF HK3512..2.5.2 旋转关节的设计各运动轴基于模块化设计;设计时已考虑各运动轴的联接;使用简单的金属板件便能将各运动轴连接可靠;并具有一定的刚度..本文各运动轴均为法兰端面输出;与金属板材间通过螺钉联接固定;依靠金属板与法兰端面的摩擦力传递扭矩到金属板材..图 2-11 为肩关节联接金属板材机械加工工程图:图2-10 肩关节联接金属板2.5.3 抓手的设计一款通用型的机械臂应该具有抓取多种物体的能力;也为某一目标物体专门设计一款抓手;因而在设计机械臂臂体与机械抓手时;需要设计一个合理的联接结构;以便机械抓手能够快速更换..机械抓手在抓取物体时需要保持一定的夹持力;本文将使用舵机为机械手爪提供动力;舵机在旋转到位后能持续提供一定的扭矩以保持夹持状态..使用舵机型号为 TowerPro MG945 全金属齿舵机;表2-5舵机型号及相关参数图2-12 为和机械抓手配合的臂体联接结构..同理只要末端执行器设计为可与该联接结构配合;即可实现更换;以完成对不同物体的抓取任务..图2-11 机械臂执行器联接结构3机械臂软件系统设计整个机械臂控制系统软件包括主计算机监控软件和各关节控制器软件..主计算机接收目标位姿数据;完成路径规划算法..另外;主计算机要实时读取关节控制器的反馈数据;记录机械臂的当前位姿;并显示在屏幕上..不仅直线运动、点到点运动、复位动作的完成需要主计算机监控软件协调;而且像各关节绝对位置的确定过程、各关节运动范围是否越界也必须由主计算机实时参与;及时做出决策..主计算机还要提供给用户友好的人机交互界面;方便于用户输入各种命令;存储设置好的参数;允许数据以表格或者曲线等形式导出..3.1 关节控制器软件设计3.1.1 PID控制算法关节控制器TMS320LF2407来实现;完成电机的位置环控制和速度环控制;如图3-1所示..位置环的控制周期设为2ms;速度环的控制周期也设为2ms..由于采用了速度环;系统的动态性性能可以得到显着提高..两个闭环都采用积分分离PD控制;根据实际调试情况;可以对控制律进行适当的化简..零位霍尔接近开关在系统上电时用于较粗略的确定电机的绝对位置;再结合增量编码器的Z通道的信号;就可以较精确的确定出电机的绝对位置..主计算机路径规划求得的目标位置;应该换算成增量码盘的脉冲数后;再发给关节控制器..关节控制器利用它和从增量编码器实际测得的脉冲数进行比较;利用积分分离PID算法求解位置环的控制量..3.1.2 关节控制器程序流程主程序的流程图如3-2所示:图3-1 主程序流程图寄存器初始化操作主要包括:设置CPUCLK为外部晶振的2倍频;即16MHZ;设置串口通讯波特率为:38.4kbPs;设置定时器/计数器相关寄存器;设置QEP 电路单元相关寄存器;设置中断控制寄存器等等..串口数据接收中断服务程序流程图如3-3所示..在中断服务程序中;读取数据接收寄存器中的数据;存入数据接收区;而并不作任何进一步分析和处理..数据接收区是内存中暂时存放数据的区域;当存满一条完整指令信息后;由主程序分析和处理..图 3-2 串口数据接收中断服务程序流程图控制周期2ms定时中断服务程序的流程见图3-4..定时器/计数器3为位置环和速度环控制周期定时2ms;每3ms进入定时中断服务程序一次;读取位置反馈值和速度反馈值;进行积分分离PID运算;最后输出给DA转换成模拟量..每一个插补周期50ms;主计算机向关节控制器发送一次运动规划后的目标位置..该目标位置是以增量编码器信号四倍频后的脉冲数为单位;以前一次的目标位置作为脉冲计数的零点;因此;关节控制器在读取新的目标位置后;也应该以前一次的目标位置作为新的增量码盘脉冲计数零点;测量实际的电机位置;与新的目标位置比较、运算..主计算机根据需要可以查询当前电机运行的实际位置;关节控制器返回的位置则是关节角的绝对位置;单位是0.1度..图3-3 控制周期定时中断服务服务程序流程图4 结束语本文提出了一套机械臂结构方案..硬件上;对机械臂的构型、臂杆长度、电机、驱动器、减速器、传感器和主控制器进行了选型..并且对机械臂进行了模块化设计;其中包括旋转关节的设计、连接件的设计和抓手的设计..软件方面设计了DSP关节控制器;实现了电机位置和速度闭环控制..基于RS485总线和DSP 的分布式控制体系结构;具有高速、稳定、可靠、易于维护等优点;适合于六自由度机械臂的实时控制..5 参考文献1 王罗罗. 机械臂的结构设计及控制研究D. 哈尔滨工业大学; 2009.2 招绍坤. 轻型机械臂模块化设计与运动控制的研究 D. 哈尔滨工业大学; 2010.3 王再明. 轻型臂电控系统的研究D. 哈尔滨工业大学; 2007.4 方红根;杨军. 基于模块化关节轻型机械臂的研制J. 上海电气技术; 2011.5 濮良贵. 机械设计M. 北京:高等教育出版社;2012:186-273.6 李世其; 刘洋; 朱文革 ;刘燕; 贾阳. 多关节轻型机械臂的设计研究J. 航天器工程; 2009.7 刘宝志. 步进电机的精确控制方法研究D. 山东大学; 2010.8 雷凯. 步进电机细分驱动技术的研究D. 苏州大学; 2003.。
编码器芯片安全操作及保养规程
编码器芯片安全操作及保养规程前言编码器芯片在许多行业的自动化装置中都扮演着重要的角色,因此,对其安全操作和保养十分重要。
本文档将对编码器芯片的安全操作和保养进行详细的介绍,以确保设备的正常运行和有效延长芯片寿命。
安全操作规程1. 禁止开机前拆卸在保养编码器芯片前,一定要先关闭全部电路,确保设备完全停止运作,从而避免因误操作而导致危险。
拆卸编码器芯片应该在设备关机后进行。
同时,在拆卸时应该用规定的工具和方法,以防止对设备和其它器材造成不必要的损伤。
2. 保持场所干燥编码器芯片善于适应不同环境,但是它很容易受到潮湿和高温环境的影响而引起故障。
因此,在安装和使用设备时,应保持场所干燥、卫生,并经常进行清洁、维护。
3. 防止静电损坏编码器芯片在使用过程中,很容易受到静电的干扰和损坏,因此,必须采取一系列的保护措施。
在拆卸芯片前,必须采取防静电措施,如佩戴防静电手环或使用防静电垫。
同时,在处理芯片时,也不允许use of 静电吸尘器、草桥等有严重静电影响的工具。
4. 安全用电使用设备时,应遵循电气安全标准规定,如使用要符合标准的电源插头、电缆等,并检查设备的地线是否连接牢固。
除此之外,还应经常检查电线的磨损、破损情况,及时更换以确保电气安全。
5. 移动设备要稳定在移动编码器芯片时,应非常谨慎。
芯片是非常脆弱的、有温度敏感,所以在安装和使用设备时,应避免非正常的振动、碰撞等情况,以避免芯片因此而损坏。
保养规程1. 经常清洁为了保持编码器芯片的正常运行和delay ,经常对设备进行清洁非常关键。
清洁时要非常小心轻柔,以避免对芯片和其它器材造成伤害。
同时,也不允许 use of 清洁工具或化学物品,以保证最小的干扰芯片的运作和可靠性。
2. 维护环境为了健康有效的运行编码器芯片,一定要保持良好的环境。
应使用标准的轴承、防护罩等零部件,并请经常检查、维修。
3. 特别维护在编码器芯片的运作过程中,一些具体特殊维护措施也十分重要。
关于THB7128芯片使用注意点(网上好不容易找到的)

关于THB7128芯片应用注意事项1、芯片最高电压为36V(空载状态下),电机在运行时会产生的感应电动势,电感越大、速度越快产生的电动势越大。
所以在选择电源时,需要考虑这方面因素;推荐最高使用32V以下电源。
一般应用场合,选择9 ~ 24V的电源即可。
2、芯片的锁相响应时间设置在0.6s,也就是说,在0.6s的时间内脉冲(CLK)没有变化,芯片会在VREF脚与地间并入一个1.2K的电阻来减小VREF的值,从而达到电机在无信号的情况下低电流工作,降低芯片的功耗。
改变下图中电阻R4的大小,即可改变锁定电流的大小。
( 更具体介绍请到海华博远网站上的交流区查看 )3、OSC1为衰减时间设置,推荐100pf~470pf之间,对应的衰减时间约10~47us。
具体调整方式:更换OSC1电容,由低向高调,以电机运行平稳,噪音低、震动小时为佳。
如果OSC1选择100pF时锁相噪音依然明显,请检查一下芯片的三个接地脚是否保证了最短化连接。
4、在四个电机输出端与地之间需接入电阻Rx,阻值视供电电压而定,VM/Rx在5mA左右即可。
作用是抑制感应毛刺电压对芯片的损坏。
建议四个负载电阻最小用0805以上封装的5、设计PCB时要注意保证芯片的三个接地脚要最短化直接连接( 线宽不小于1MM ),然后与检测电阻接地端连接,再一起引出。
检测电阻和芯片之间的连线要短、粗,建议长度小于1CM,线宽不小于1.5MM。
检测电阻接地端电流波动非常大,为了减小阻抗,与电源输入地的连线尽量加宽。
6、在靠近15脚(VCC)、14脚(VM)管脚处各放置1个0.1uf的电容。
驱动板上电源端滤波电容不能小于47uF,尽量靠近芯片放置。
或者是靠近芯片旁边放置47uF左右的小电解电容,电源输入端再放置220uF以上的大电解电容,以减小电源端的高频阻抗,保证驱动效果。
7、检测电阻请选用2512封装的贴片电阻或不小于1W金属膜功率电阻,推荐使用0.22Ω电流大小按下面公式计算:VREF=5*Io*Rs更具体的应用资料请到海华博远网站/cn/“文档下载”栏目下载。
TH2817TH2812C电桥操作指导

TH2817TH2812C电桥操作指导1. 目的本作业规范的目的是规定TH2817、TH2812C电桥测量仪的使用方法,便于正确使用电桥自动测量仪测试电阻、电容、电感等器件是否满足规定的质量要求。
2.范围本作业规范适用于本公司所有电阻、电容、电感类器件的测量。
3.权责品质部:负责LCR的测量。
4. 定义无5.内容5.1 电桥工作环境5.1.1温度10-30℃,湿度≤80%RH。
5.1.2要求放置于通风良好的工作场所,以免仪器因过热而损坏。
5.1.3仪器及测试线应远离电磁场,以免影响正常测量。
5.2 使用5.2.1检查测试夹具是否正确连接,将电桥的电源线连接到电源插座,按前板的POWER开关按至ON,显示窗口应有不断翻动的数字显示,否则重新启动电源。
预热10分钟,待机内达到热平衡后,进行正常测试。
5.2.2为消除测试导线之离散电容与残余阻抗,电桥在每班上班第一次开机测试时都必须先归零。
归零动作分两种:开路与短路。
5.2.2.1开路清零:测试夹具必须开路,不得连接任何元件,按面板上的“清零”键执行开路清零;5.2.2.2短路清零:测试夹具必须短路(可便夹具的两接头有效接触),按面板上的“清零”键执行短路清零;5.2.2.3执行清零时,一次即对当前测量速度、所有频率下各量程进行清零,当测量更换测量速度、测试电平及测量环境有变化时,如测量夹具等需重新清零,并将覆盖上次测量速度下的清零值。
5.2.2.3在清零时显示器B显示“FAIL”表示清零错误,反复重度仍无法成功,应立即通知品质工程师处理。
5.2.3可选测量参数有以下几种L/Q:电感量L——品质因数QC/D:电容量C——损耗角正切DR/Q:电阻值R——品质因数DZ/Q:阻抗值Z——品质因数DZ/D:阻抗值Z——损耗角正切D参数L、C、R、Z均由显示器A显示,D、Q由显示器B显示。
5.2.4 L、C、R的测量值均有串联和并联等效之分,且随D值的不同而变化,其转换关系见表一。
基于THB7128驱动步进电机应用电路设计

基于THB7128驱动步进电机应用电路设计作者:朱承志来源:《科技风》2020年第17期摘要:步进电机在医疗设备领域的应用越来越广泛,针对细分驱动步进电路,优化设计THB7128的外围电路,实现可设定细分数,驱动电流,对步进电机精确控制,为步进电机在医疗设备领域的应用提供性能可靠的驱动电路板。
关键词:步进电机;THB7128;驱动电路;细分驱动Abstract:Stepper motor is more and more widely applied in the field of medical equipment,in view of the subdivided driving stepper circuit,the optimization design of THB7128 peripheral circuit,realize fine fraction can be set,drive current,accurate control,the stepper motor for the application of step motor in the field of medical equipment to provide reliable performance of the drive circuit board.Key words:Stepper motor;THB7128;Driving Board;Micro Stepping步进电机采用电子换向,只要控制输入脉冲信号的开关、频率和数量,就可以控制步进电机的启动、停止、速度、线性位移量或角位移量等[1]。
步进电机以其价格便宜、易于实现速度和精确定位控制、无累积误差等特点,在医疗设备的精确控制方面获得广泛应用。
1 二相四线步进电机的细分驱动(micro stepping)通过调节PWM宽度,控制各相绕组中的电流,使它们按一定的规律增加或减小,即在零电流到最大电流之间形成多个稳定的中间电流状态,相应的合成磁场矢量的方向也将存在多个稳定的中间状态,驱动电机微动,即θ/N(N为细分数)[2]。
(完整word)09通信一班石亚娟-0909131109-基于颜色识别的自动分拣系统设计

学号0909131109毕业论文(设计)课题基于颜色识别的自动分拣系统设计学生姓名石亚娟系别电气工程系专业班级通信工程一班指导教师崔雪英二○一三年六月目录摘要 ...................................................... Abstract .. (I)第一章绪论 .............................................. - 0 -1。
1 颜色分拣系统设计的意义............................ - 0 -1。
2系统示意图 ........................................ - 0 -第二章系统的硬件设计 .................................... - 1 -2。
1 单片机最小系统.................................... - 1 -2.1.1 结构及原理图.................................. - 1 -2。
1.2功能......................................... - 1 -2.2转轮驱动的电路设计及其功能 ......................... - 2 -2。
2。
1步进电机原理及结构.......................... - 2 -2。
2。
2步进电机的功能.............................. - 3 -2.2.3霍尔开关...................................... - 3 -2.3颜色识别的硬件设计 ................................. - 4 -2。
3。
1颜色传感器TCS3200的原理、结构及功能........ - 4 -2.3.1红外传感器的原理及功能........................ - 6 -2。
联芯通双通道通信hybrid dual mode芯片注意事项

联芯通双通道通信hybrid dual mode芯片注
意事项
联芯通公司的双通道通信芯片采用了hybrid dual mode技术,其具备双频段的通信能力,既能在低频段进行长距离的通信,又能在高频段进行高速的数据传输。
但在使用这种芯片时,需要注意以下几点:
1.在使用芯片之前,需要对芯片的使用说明书进行仔细阅读,并按照指示进行操作,避免出现不必要的故障。
2.芯片在使用时需要与相应的天线进行配合,以保证其具有良好的通信效果。
3.在进行高速数据传输时,需要使用高品质的连线和接口,以提高数据传输的稳定性和可靠性。
4.在使用芯片过程中,必须保持其环境的清洁和干燥,避免出现尘埃和湿度等影响芯片性能的现象。
5.根据芯片的使用要求,确保其输入电压、电流等参数在合理范围内,以免对芯片造成损坏。
总之,在使用联芯通公司的双通道通信芯片时,需要仔细阅读说明书,保持良好的使用环境和操作习惯,并充分考虑芯片的技术特点和使用注意事项,以充分发挥其功能并保证其正常运行。
THB6128应用笔记

H H B Y 关于步进电机驱动芯片THB6128常见问题的解答Q1,问:能否提供THB6128的应用电路?答:可以。
THB6128的应用电路设计文件是免费提供的,具体请查阅 海华博远 网站http://www.hhbytech.co m/cn/soft_down.aspxQ2,问:THB6128 有多少种细分模式?答:整步、半步、四细分、八细分、十六细分、三十二细分、六十四细分、一百二十八细分Q3,问:THB6128是否需要外接功率模块?答:不需要,THB6128集成逻辑模块和功率模块,配合简单的外围电路即可实现高性能、多细分、大电流的双极性步进电机驱动,为你的产品更加经济、易用的解决方案。
Q4,问:THB6128的输入控制接口复杂吗?答:THB6128最少只需两个端口(步进脉冲、方向)即可。
Q5,问:不使用的输入端是否需要上拉或下拉电阻? 答:不需要,输入端接口在芯片内部都已经接了下拉电阻。
Q6,问:THB6128提供了哪些保护功能? 答: 过热停机(TSD ); 过流短路保护;Q7,问:THB6128电机驱动电压最大是多少?答:任何情况下都不得超过36V 。
Q8,问:数据手册上提到的±2A 驱动能力,是指的整个芯片还是每一相H 桥?答:是指是每一相H 桥标称±2 A 驱动能力。
另外要注意芯片运行时结温不能超过150°C 。
Q9,问:THB6128需要什么外围器件?答:1,NFA 、NFB 外接电阻RSA 和RSB ,用于PWM 恒流控制的电流采样电阻,此电阻应选用无感电阻。
电流的计算请参照以下公式:Iomax = VREF/(5*RS)在保证性能的前提下,尽量减小Rs 阻值可降低能耗,改善散热状况。
采样电阻推荐用0.2欧到0.3欧之间,H H B Y4,OSC1脚是决定斩波频率,外接的电容决定了衰减时间的长短。
通常是先确定OSC1的电容,再调整FDT 端的电压,由低向高调节,以电机运行平衡、噪音低、震动小 为佳。
无线收发芯片TH71221的应用

无线收发芯片TH71221的应用目前无线通信应用已经涉及到各个领域,给人们的生活带来了很大的便利。
人们对无线通信应用的需求进一步推进了无线通信技术的迅速进展。
本文主要介绍比利时Melexis公司推出的高性能单片无线收发芯片TH71221的组成结构及其性能特点,并结合实例探讨了该芯片的详细应用。
TH71221的组成结构及其性能特点TH71221的组成结构TH71221是可编程无线收发芯片。
它可应用于低功耗多通道或单通道半双工数据传输系统,可工作在ISM频段(300"930MHz)。
在可编程用户模式下,通过用法一个外部压控振荡变容使它的最低工作频率可低至27MHz。
TH71221的内部结构包括:可变增益的低噪声(LNA)、混频器、中频放大器、FSK解调器、(OA1,OA?2)、ASK解调器、控制规律串行接口(SCI)、(PA)、锁相环合成器等。
它的主要模块是一个可编程的锁相环合成器,在放射模式下产生载波频率,可以采纳FSK/ASK两种调制方式。
在接收模式下产生本地振荡信号,采纳超外差接收方式。
在接收模式下,TH71221可看成是一个传统的超外差接收器。
输入信号经低噪声放大器放大后翻转进入混频器,通过混频器混频产生中频(IF)信号。
在中频处理阶段,该信号在送入解调器之前被放大和滤波。
RSSI信号经过混频后置于RSSI引脚上,解调后,TH71221从引脚OUT-DTA输出解调信号。
在发送模式下,压控(VCO)输出的信号挺直送入功率放大器。
压控振荡器的频率此时就是载波频率。
主要性能TH71221的主要工作参数可由一个串行接口编程设定,用法十分便利并且具有灵便性。
该芯片的接收敏捷度可达-105dBm(FSK)/-107dBm(ASK),可编程输出功率为-20dBm"+10dBm,在挺直压控振荡调制模式下,最大数据数率可达115Kbps。
FSK模式下,它的最大频偏为+/-2.5"+/-80KHz。
两相四线步进电机+细分器
两相四线步进电机四线电机只有双极驱动,接法为:黑接A+ 绿接A-红接B+ 蓝接 B-细分器细分调节(Excitation)拨码开关S1,S2和S3用来调节电机细分模式,共8种细分模式:S1=0,S2=0,S3=0,整步S1=1,S2=0,S3=0,半步S1=0,S2=1,S3=0,1/4步S1=1,S2=1,S3=0,1/8步S1=0,S2=0,S3=1,1/16步S1=1,S2=0,S3=1,1/32步S1=0,S2=1,S3=1,1/64步S1=1,S2=1,S3=1,1/128步注:*拨码开关拨至ON表示1,反之表示0衰减调节(Decay)THB7128芯片无需衰减调节,芯片内部固定在最广泛的适用电流衰减值电源指示灯VCC:接通电源,VCC亮起信号输入端口:CLK+:步进脉冲信号+极CLK-:步进脉冲信号-极EN+:使能信号+极EN-:使能信号-极CW+:方向控制信号+极CW-:方向控制信号-极输出及电源端口:VCC:接电源+极GND:接电源-极A+,A- 接步进电机A相B+,B- 接步进电机B相注:1.有6个输入端,可方便的接成共阳或共阴形式2.输入脉冲电平是5V,若是12V电平则要串接一个1K欧电阻,若是24V 则串接一个2.4K欧的电阻3.CLK有脉冲时电机转动,若0.5秒内CLK无脉冲,则进入设定的保持电流状态,当CLK脉冲再次到来,电机电流立即进入工作电流模式4.CW方向控制信号为高电平,电机在步进脉冲触发下正转,为低电平或悬空则为反转5.EN为低电平或悬空时为工作状态,高电平时输出电流为0,电机无锁定转矩(脱机)6.电源范围为:8-35V7.应反复检查,接线无误才可通电产品特点(1) 最高输入电压DC34V(2) 电源反接保护(3) 接口高速光耦隔离(4) 高集成度高可靠性主要功能(1) 细分8档可调,最高128细分(2) 输出电流8档可调,最大3A(3) 自动半流锁定(4) 过热自动保护端子说明工作电压连接:建议使用DC24V供电1. VM 连接直流电源正2. GND连接直流电源负电机绕组连接:1. A+ 连接电机绕组A相2. A- 连接电机绕组A-相3. B+ 连接电机绕组B相4. B- 连接电机绕组B-相信号输入端:1. Clk+ 脉冲输入信号正端2. CP- 脉冲输入信号负端3. cw+ 方向输入信号正端4. DIR- 方向输入信号负端5. EN+ 脱机使能信号正端6. EN- 脱机使能信号负端输入信号接口输入信号共有三路:(1) 步进脉冲信号CP+,CP-;(2)方向电平信号DIR+,DIR-;(3)脱机使能信号EN+,EN-。
基于STM32XY轴金属探测

基于STM32单片机的金属探测装置的设计与实现韩少栋 陈 龙(杭州电子科技大学电子信息学院,浙江 杭州 310018)【摘 要】本文介绍了一种基于STM32单片机和导轨的二维平面金属自动扫描装置。
本系统包含单片机最小系统电路、步进电机驱动电路、稳压电路、人机交互电路等硬件部分和SPI通信协议程序、电机驱动程序、液晶显示程序等软件部分以及丝杆导轨、同步带导轨等机械部分。
本系统通过STM32单片机和LDC1000电感数字转换器,控制以芯片THB7128为驱动电路的步进电机,使LDC1000能够在一个大约为50cm*50cm的平面内进行自动扫描,当发现金属时,进行精确定位,并具有液晶显示、声光提示等多种功能。
本系统的设计方案具有原理易懂、方法巧妙、发现目标快速等特点,具有较高的实践价值。
【关键词】STM32单片机LDC1000电感数字转换器THB7128驱动芯片丝杆导轨同步带导轨1前言金属探测器,就是利用金属传感器在一定的范围内扫描金属物体,同时可以做出精确定位的装置。
如今,在安全防盗、战地考古甚至在食品行业中,金属探测装置都起着至关重要的作用,它不仅可以检测到军火、刀具,还能发现硬币、食品中的金属杂质等等。
与传统探测器相比,现代金属探测器具有扫描速度快、灵敏度高、携带便捷等特点,因此越来越受到人们的青睐。
本文的目的就是设计与实现快速并且自动寻找金属物体的探测装置。
2金属探测扫描装置的基本组成及工作原理本文所设计的金属探测自动扫描装置的基本组成结构框图如图1所示,在这个系统中,MCU采用单片机STM32,金属检测传感器采用德州仪器的LDC1000电感数字转换器。
电机选用步进电机,驱动选用THB7128芯片,机械部分选用丝杆导轨和同步带导轨。
OLED屏幕显示实时数据,按键作为输入设备,对装置的启动和传感器的位置进行调整。
蜂鸣器和LED灯作为检测到金属物的提示信号。
图1系统基本组成结构框图本设计的工作原理是将单片机与LDC1000电感数字转换器进行SPI通信。
坦克打靶实验报告

坦克打靶摘要:本项目采用MSPG2553超低功耗MCU为核心来完成小车的寻迹、光电瞄准、激光炮定位并射击等功能。
车体采用四轮驱动的坦克模型;采用PWM驱动芯片L298N控制电机可以比较好的实现对电机的控制与驱动;红外光电传感器ST188检测黑线采用状态机制,传感器不同的组合状态实现寻迹;光敏三极管3DU33检测光强,将均匀安装在圆盘周围的光敏电阻的电压值采样并进行比较找出光线最前的方向实现光电瞄准;通过步进电机实现激光炮的方向控制。
电动小车做到探测、循迹、打靶等基本功能。
关键字:MSP430,光电寻迹,光电瞄准,PWM调速目录一、方案设计与论证 (3)1.寻迹传感器方案的选择与论证 (3)2.炮台电机方案的选择与论证 (3)3.寻迹电机驱动方案的选择与论证 (3)4.炮台电机驱动方案的选择与论证 (3)5.光源探测方案的选择与论证 (4)6.炮塔控制方案的选择与论证 (4)二、系统总体设计方案及实现方框图 (4)三、单元电路的设计和实现 (5)1.寻迹模块的设计 (5)2.直流电机驱动模块 (5)3.炮台点击驱动模块 (6)4.光源检测模块 (6)5.声光报警模块 (6)6.电源模块 (7)四、系统软件设计 (7)五、系统测试 (8)六、实验小结 (8)七、参考文献 (8)一、方案设计与论证根据题目要求,坦克打靶系统可划分为火炮控制部分和信号检测部分。
其中信号检测部分主要包括路面检测模块和光源探测模块;控制部分包括小车电机驱动模块、炮塔电机驱动模块、控制器模块、显示模块和计时模块。
系统采用四轮驱动的简易坦克车,并在其上安装由电动机驱动的可以自由旋转的炮塔,在炮塔上安装激光笔以代替火炮。
本题的任务是控制坦克沿靶场中预先设置的轨迹,快速寻迹行进,并同时以光电方式瞄准光靶,实现激光打靶。
1.寻迹传感器方案的选择与论证方案一:采用光敏传感器,根据白色背景和黑线反光程度的不同来判断传感器是否位于黑线上。
方案二:采用反射式红外传感器ST188来进行探测。
芯片技术的使用注意事项

芯片技术的使用注意事项随着科技的不断进步,芯片技术在各个领域的应用越来越广泛。
从智能手机到汽车,从医疗设备到家电,芯片技术的存在无处不在。
然而,尽管芯片技术带来了许多便利和创新,但我们在使用芯片技术时也需要注意一些事项,以确保其安全和可靠性。
首先,我们需要注意芯片的质量和来源。
市场上存在着各种各样的芯片产品,质量参差不齐。
因此,在购买和使用芯片技术时,我们应该选择信誉良好的供应商或品牌,以确保芯片的质量和可靠性。
此外,我们还可以通过查看产品的认证和标准符合情况,来判断芯片的质量水平。
其次,我们需要关注芯片的使用环境。
不同的芯片在不同的环境下可能表现出不同的性能。
例如,一些芯片对温度和湿度非常敏感,如果在恶劣的环境下使用,可能会导致性能下降甚至损坏。
因此,在使用芯片技术时,我们应该了解芯片的使用环境要求,并尽量在符合要求的条件下使用。
此外,我们还需要注意芯片的使用方法和操作规范。
不正确的使用方法可能会导致芯片的损坏或性能下降。
例如,在安装芯片时,我们应该遵循正确的安装步骤和操作规范,确保芯片与设备的接触良好,并避免静电等因素对芯片的影响。
另外,在使用芯片技术时,我们也应该遵循相关的使用指南和注意事项,以提高芯片的使用寿命和性能。
此外,我们还需要关注芯片的维护和保养。
芯片技术虽然先进,但也需要定期的维护和保养,以确保其正常运行和稳定性能。
例如,我们可以定期清洁芯片和设备,以去除尘埃和污渍,避免影响芯片的散热和信号传输。
另外,我们还可以定期检查芯片的连接和线路,以确保其正常工作。
最后,我们还需要注意芯片技术的安全性。
随着芯片技术的不断发展,网络安全问题也越来越突出。
一些恶意软件和黑客攻击可能会利用芯片技术的漏洞来入侵系统或窃取信息。
因此,在使用芯片技术时,我们应该关注系统的安全性,并采取相应的安全措施,例如安装防火墙和杀毒软件,定期更新系统和软件补丁等。
综上所述,芯片技术的使用注意事项涉及到芯片的质量和来源、使用环境、使用方法和操作规范、维护和保养,以及安全性等方面。
电动注射泵控制装置的设计
电动注射泵控制装置的设计作者:崔金辉来源:《电子世界》2013年第05期【摘要】本文阐述了利用单片机实现电动注射泵进行静脉输液自动化的过程,解决了现有的注射器在使用时需要用人力拉取或推挤注射杆导致注射速度不均匀、医护人员疲劳等问题。
阐述了控制系统的功能、组成结构、重点说明了系统使用单片机控制系统的控制设置及软件编写流程,实现具有联动控制多台注射泵、人机对话数据处理等功能,为医护人员提供必要的技术服务。
【关键词】电动注射泵;注射液和注射流率电动注射泵是临床医疗和生命科学研究中经常使用的一种注射的仪器,这种仪器主要应用于静脉输液和精密化学实验。
使用先进电子技术、传感器技术、计算机技术综合应用于注射泵系统的研究与开发,设计了具有匀速注射功能的注射泵,并且可以联动控制多台注射泵工作,具有良好的人机对话界面和数据处理功能实现自动化控制。
该系统已成功应用于临床,具有广泛的市场前景。
电动注射泵系统解决了现有的注射器在使用时需要用人力拉取或推挤注射杆导致注射速度不均匀、医护人员疲劳等问题。
它可以预先设定注射液量和流率,保证神经组织适应注入的流体。
现今国内外注射泵的主要问题是精度不高,而且一般只实现单通道匀速注射。
因此设计实现具有联动控制多台注射泵,实现人机对话数据处理是非常有必要的。
一、硬件设计如图1所示,系统由软件控制模块、步进电机驱动模块、传感器检测模块和显示模块等组成。
1.软件控制模块计算机通过RS 232串口与主控制芯片模块连接,通过自主设计的监控软件,可以实时监控和管理注射泵的工作状态,运行后可以实现全自动化处理。
主控制芯片模块由ARM和FPGA以及外围电路组成,FPGA产生步进电机所需要的电脉冲信号,传送给驱动器模块,驱动器模块里的脉冲分配器把电脉冲信号按规定的方式分配给电机各相励磁绕组,从而带动步进电机转子运转。
与此同时安装在电机轴上的增量式旋转编码器和压力传感器实时监控电机的实际工作情况,由于FPGA具有硬件实时处理的特点,传感器的数据会同步传给FPGA,当旋转编码器已经停止编码,而FPGA在发送脉冲信号,则会马上停止电机运转并蜂鸣报警,进入堵转状态;在压力传感器测得压力超过最大限压时,也会马上停止电机工作,且计算机提示和蜂鸣报警。
THB7128 高细分、大功率 两相混合式步进电机驱动芯片说明书
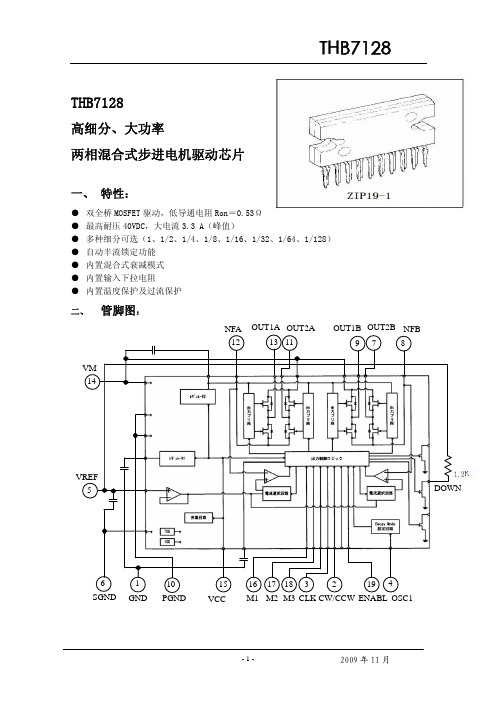
THB7128高细分、大功率两相混合式步进电机驱动芯片一、 特性:●双全桥MOSFET 驱动,低导通电阻Ron=0.53Ω●最高耐压40VDC,大电流3.3 A(峰值)●多种细分可选(1、1/2、1/4、1/8、1/16、1/32、1/64、1/128)●自动半流锁定功能●内置混合式衰减模式●内置输入下拉电阻●内置温度保护及过流保护二、管脚图:OUT1A OUT2B OUT2AOUT1B VCC191715 42 1816310 1三、 管脚说明:端子 端子符号 端子说明1 GND 地2 CW/CCW 正/反转信号输入端3 CLK 脉冲信号输入端4 OSC1 斩波频率设定电容连接端5 VREF 电流设定端6 GND 地7 OUT2B B相 OUT输出端8 NFB B相 电流检测电阻连接端9 OUT1B B相 OUT输出端10 GND 地11 OUT2A A相 OUT输出端12 NFA A相 电流检测电阻连接端13 OUT1A A相 OUT输出端14 VM 电源VM连接端15 VCC 接VCC电源16 M1 细分设置端17 M2 细分设置端18 M3 细分设置端19 ENABLE 脱机信号控制端四、 电器参数:1、最高额定值Absolute Maximum Ratings (Ta 25°C)项目 符号 额定值 符号 最高工作电压 VMmax 36V最大输出电流 Iomax 3.3A 最高逻辑输入电压 VINmax 6VVREF最高输入电压 VREFmax 3V 工作环境温度 Topg -30~+105℃保存环境温度 Tstg -40~+125℃2、正常运行参数范围Operating Range (Ta =30 to 85°C)参数 符号 最小 典型.最大 单位 逻辑输入电压 VIN2 5.0 6 V数字信号电源 VCC 3.3 5.0 6 V电源电压 VM9 −32V输出电流 Io0 − 3.0 A电流设定端 VREF0 −3V3、电器特性Electrical Characteristics (Ta = 25°C, VREF =1.5 V, VM = 24 V)项目 符号 条件 最小 标准 最大 符号待机时消耗电流 IMstn VCC=0 200 μA 消耗电流 IM VCC=5V 4 mA TSD温度 TSD 设计保证 180 ℃ Thermal Hysteresis值 ΔTSD 设计保证 40 ℃IinL1 VIN=0.8V 8 μA 逻辑端子输入电流IinH1 VIN=5V 50 μA 逻辑输入“H”Level电压 Vinh 2.0 V 逻辑输入“L”Level电压 Vinl 0.8 V 斩波频率 Fch Cosc1=100pF 83KHz OSC1端子充放电电流 Iosc1 10 μA 斩波振荡电路Vtup1 1 V 电压阈值 Vtdown10.5 V VREF端子输入电流 Iref VREF=1.5V CLK=10KHZ-0.5 μA 通电锁定切换频率 Falert 1.6 Hz Blanking时间 Tbl 1 uS 输出Ronu Io=2.0A、上側ON阻抗 0.3 Ω 输出ON阻抗Rond Io=2.0A、下側ON阻抗 0.25Ω 输出漏电流 Ioleak VM=36V 50 μA 二极管正向压降 VD ID=-2.0A 1.1V 电流设定基准电压 VRF VREF=1.5V、電流比100% 300 mV 输出短路保护Timer Latch时间 Tscp 256 μs五、 端子说明1、CLK脉冲输入端(脉冲上升沿有效)2、CW/CCW:电机正反转控制端CW/CCW为低电平时,电机正转CW/CCW为高电平时,电机反转3、ENABLE:使能端ENABLE端子为低电平时,输出强制关断,为高阻状态。
THB7128 芯片资料大全
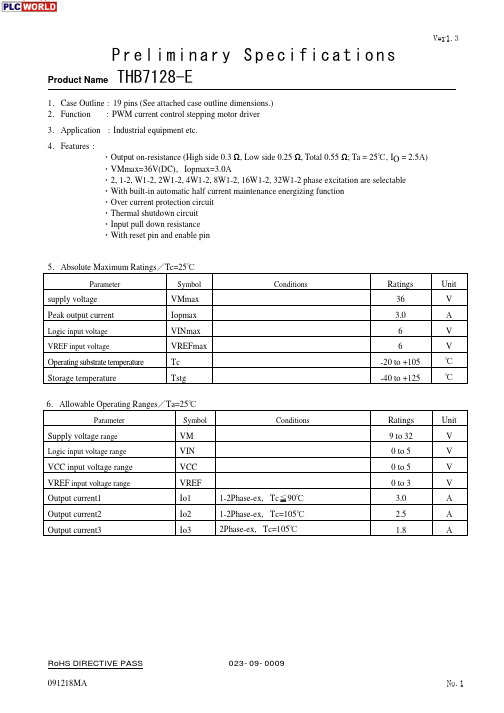
Unit V V V V A A A
Supply voltage range
Logic input voltage range
VM VIN VCC VREF Io1 Io2 Io3 1-2Phase-ex,Tc≦90℃ 1-2Phase-ex,Tc=105℃ 2Phase-ex,Tc=105℃
R2 C1
10 8 PGND SGND NFB RFB
091218MA
023-09-0009 No.3
THB7128-E 10.Pin Functions Pin No. Pin symbol 1 GND 2 CW/CCW 3 CLK 4 OSC1 5 VREF 6 SGND 7 OUT2B 8 NFB 9 OUT1B 10 PGND 11 OUT2A 12 NFA 13 OUT1A 14 VM 15 VCC 16 M1 17 M2 18 M3 19 ENABLE
Unit µA mA
IMstn
IM
VCC=”L” VCC=”H”,ENABLE="H" No Load
Design guarantee Design guarantee
Thermal shutdown temperature Thermal hysteresis width Logic pin input current Logic input high-level voltage Logic input low-level voltage Chopping frequency Chopping frequency Chopping oscillator circuit threshold voltage VREF pin input voltage DOWN output residual voltage Hold current switching frequency Blanking time Output block
基于相位法的三维测量系统的相移误差分析
基于相位法的三维测量系统的相移误差分析吴禄慎;万露萍;李彧雯【摘要】The precise control of grating phase-stepping is the foundation of measuring instrument based on projected grating phase method. In order to eliminate the phase-stepping error,the hardware system is designed for higher precision movement of step-motor. An improved algorithm is introduced based on the traditional four-step phase extracting algorithm. Using the new system,the minimal segmentation for the step-motor becomes 1/128. The improved algorithm is immune to the phase-stepping error since the stable error becomes the intermediate variable that does not influence the phase results. The experiment indicates:the improved hardware system is easier to operate;the improved algorithm restrains the movement error and then enhances the accuracy,reliability and the system's performance.%采用投影栅相位法进行三维测量时,光栅移动的精密控制是整个测量系统的基础.针对相移误差,对硬件系统进行设计,通过步进电机细分控制实现更小、更平稳的相移误差;并对传统的四步相位提取算法进行优化,在优化算法中,稳定的相移误差项可以作为中间变量,即其大小随机变化不再对相位计算结果产生影响.实验结果表明:设计的硬件系统调试简单,步进电机可以实现最小1/128细分;优化后的算法有效地抑制了相移误差对测量结果的影响,进一步提高了表面微观形貌的测量精度和可靠性;从而使得测量系统的整体性能指标得到提升.【期刊名称】《激光与红外》【年(卷),期】2012(042)009【总页数】5页(P1040-1044)【关键词】投影栅相位法;细分控制;相移误差;相位提取算法【作者】吴禄慎;万露萍;李彧雯【作者单位】南昌大学机电工程学院,江西南昌330031;南昌大学机电工程学院,江西南昌330031;南昌大学机电工程学院,江西南昌330031【正文语种】中文【中图分类】TN291 引言在众多的三维测量技术当中,基于投影栅相位法的三维测量技术因具有非接触、全场性、高精度和实时自动处理等特点,一直是研究的热点[1-3]。
THB7128盒式驱动器说明
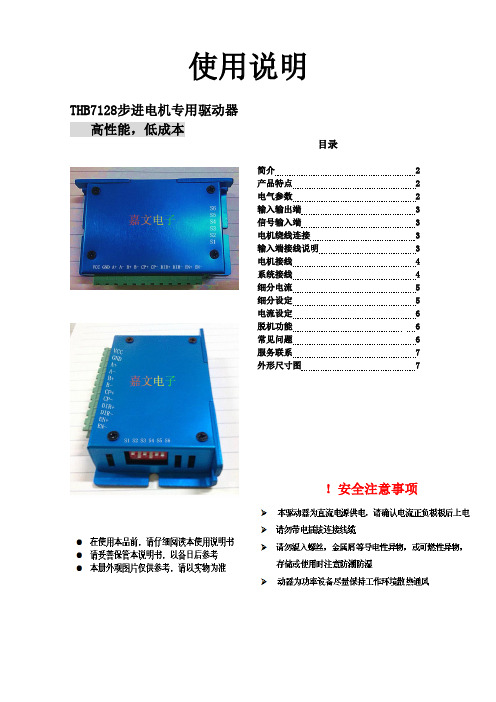
使用说明THB7128步进电机专用驱动器高性能,低成本目录简介 2 产品特点 2 电气参数 2 输入输出端 3 信号输入端 3 电机绕线连接 3 输入端接线说明 3 电机接线 4 系统接线 4 细分电流 5 细分设定 5 电流设定 6 脱机功能 6 常见问题 6 服务联系 7 外形尺寸图 7!安全注意事项一、简介THB7128步进电机驱动器是一款专业的两相步进电机驱动,可实现正反转控制。
通过S4 S5 S6 3位拨码开关选择8 档细分控制(1、2、4、8、16、32、64、128 ),通过S1 S2 S3 3位拨码开关选择6档电流控制(0.5A,1A,1.5A ,2.0A,2.5A,3.0A)。
适合驱动57,42,39,35,28 型两相、四相混合式步进电机。
驱动器具有噪音小,震动小,运行平稳的特点。
产品特点※原装全新日本东芝驱动芯片※电流由拨码开关选择※接口采用高速光耦隔离※八种细分可调※自动半流减少发热量※大面积散热片不惧高温环境使用※抗高频干扰能力强※输入电压防反接保护※过热,过流短路保护※故障红色警示灯电气参数输入电压 9-32V,推荐使用24V输入电流推荐使用开关电源功率24V/3A输出电流0.5-3.0A最大功耗72W细分1、2、4、8、16、32、64、128温度工作温度-10~45℃;存放温度-40℃~70℃湿度不能结露,不能有水珠气体禁止有可燃气体和导电灰尘重量0.15千克输入输出端说明信号输入端CP+:脉冲信号输入正。
CP-:脉冲信号输入负。
DIR+:电机正、反转控制正。
DIR-:电机正、反转控制负。
EN+:电机脱机控制正。
EN-:电机脱机控制负。
◆电机绕组连接A+:连接电机绕组A+相。
A-:连接电机绕组A-相。
B+:连接电机绕组B+相。
B-:连接电机绕组B-相。
◆电源电压连接VCC:电源正端“+”GND:电源负端“-”注意:DC直流范围:9-32V。
不可以超过此范围,否则会无法正常工作甚至损坏驱动器.◆输入端接线说明输入信号共有三路,它们是:①步进脉冲信号CP+,CP-;②方向电平信号DIR+,DIR-③脱机信号EN+,EN-。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
百度文库- 让每个人平等地提升自我
关于THB7128芯片应用注意事项
在使用THB7128过程中,有以下几点需要注意:
1、芯片击穿的电压为36V(空载状态下),电机在运行时会产生的感应电动势,
电感越大、速度越快产生的电动势越大。
所以在选择电源时,需要把这考虑进去,推荐最高使用32V以下电源。
2、芯片的锁定时间设置在,也就是说,在的时间内脉冲(CLK)没有变化,芯片
就减小VREF的值,从而达到电机在无信号的情况下低电流工作,降低芯片的功耗。
改变下图中电阻R4的大小,即可改变锁定电流的大小。
3、OSC1为衰减时间设置,推荐100pf~470pf之间,对应的衰减时间约10~47us。
Cosc1的大小决定了衰减时间的长短,具体调整方式:更换OSC1电容,由低向高调,以电机运行平稳,噪音低、震动小时为佳。
4、在四个电机输出端与地之间需接入电阻Rx,阻值视供电电压而定,VM/Rx在
5mA左右即可。
作用是减弱毛刺对芯片的损坏。
5、在画芯片管脚的地线时要尽可能的粗,检测电阻和芯片之间的连线要短、粗,
两者的地线端相连也要短粗。
6、在画PCB时,芯片周围的安全间距至少要15mil(0.3mm),在四个电机输出
端和电源端尤其需要注意。
7、在靠近15脚(VCC)、14脚(VM)管脚处各放置1个的电容。
8、检测电阻选用2512封装的贴片或1W的金属膜,推荐使用Ω电流大小按下面
公式计算:
VREF=5*Io*Rs
1。