基于MATLAB/SIMULINK的自动控制系统仿真实验
MATLAB自动控制系统仿真simulink
目录1 绪论 (1)1.1 题目背景、研究意义 (1)1.2 国内外相关研究情况 (1)2 自动控制概述 (3)2.1 自动控制概念 (3)2.2 自动控制系统的分类 (4)2.3 对控制系统的性能要求 (5)2.4 典型环节 (6)3 MATLAB仿真软件的应用 (10)3.1 MATLAB的基本介绍 (10)3.2 MATLAB的仿真 (10)3.3 控制系统的动态仿真 (11)4 自动控制系统仿真 (14)4.1 直线一级倒立摆系统的建模及仿真 (14)4.1.1 系统组成 (14)4.1.2 模型的建立 (14)4.1.3 PID控制器的设计 (20)4.1.4 PID控制器MATLAB仿真 (22)4.2 三容水箱的建模及仿真 (24)4.2.1 建立三容水箱的数学模型 (24)4.2.2 系统校正 (25)总结 (28)致谢 (29)参考文献 (30)1 绪论1.1 题目背景、研究意义MATLAB语言是当今国际控制界最为流行的控制系统计算机辅助设计语言,它的出现为控制系统的计算机辅助分析和设计带来了全新的手段。
其中图形交互式的模型输入计算机仿真环境SIMULINK,为MATLAB应用的进一步推广起到了积极的推动作用。
现在,MATLAB语言已经风靡全世界,成为控制系统CAD领域最普及、也是最受欢迎的软件环境。
随着计算机技术的发展和应用,自动控制理论和技术在宇航、机器人控制、导弹制导及核动力等高新技术领域中的应用也愈来愈深入广泛。
不仅如此,自动控制技术的应用范围现在已扩展到生物、医学、环境、经济管理和其它许多社会生活领域中,成为现代社会生活中不可缺少的一部分。
随着时代进步和人们生活水平的提高,在人类探知未来,认识和改造自然,建设高度文明和发达社会的活动中,自动控制理论和技术必将进一步发挥更加重要的作用。
作为一个工程技术人员,了解和掌握自动控制的有关知识是十分必要的。
自动控制技术的应用不仅使生产过程实现了自动化,极大地提高了劳动生产率,而且减轻了人的劳动强度。
基于Matlab_Simulink数控伺服系统的建模仿真
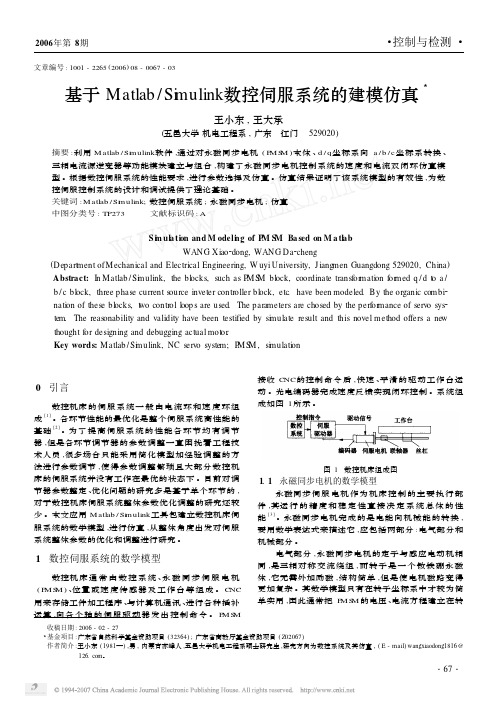
文章编号:1001-2265(2006)08-0067-03收稿日期:2006-02-27 3基金项目:广东省自然科学基金资助项目(32364);广东省高教厅基金资助项目(Z02067)作者简介:王小东(1981—),男,内蒙古赤峰人,五邑大学机电工程系硕士研究生,研究方向为数控系统及其仿真,(E -mail )wangxiaodong1816@ 。
基于Matlab /Si m ulink 数控伺服系统的建模仿真3王小东,王大承(五邑大学机电工程系,广东 江门 529020)摘要:利用M atlab /Si m ulink 软件,通过对永磁同步电机(P M S M )本体、d /q 坐标系向a /b /c 坐标系转换、三相电流源逆变器等功能模块建立与组合,构建了永磁同步电机控制系统的速度和电流双闭环仿真模型。
根据数控伺服系统的性能要求,进行参数选择及仿真。
仿真结果证明了该系统模型的有效性,为数控伺服控制系统的设计和调试提供了理论基础。
关键词:M atlab /Si m ulink;数控伺服系统;永磁同步电机;仿真中图分类号:TP273 文献标识码:AS i m ul a ti on and M odeli n g of P M S M Ba sed on M a tl abWANG Xiao 2dong,WANG Da 2cheng(Depart m ent of Mechanical and Electrical Engineering,W uyi University,J iang men Guangdong 529020,China )Abstract:I n Matlab /Si m ulink,the bl ocks,such as P MS M bl ock,coordinate transfor mati on f or med q /d t o a /b /c bl ock,three phase current s ource inveter contr oller bl ock,etc .have been modeled .By the organic combi 2nati on of these bl ocks,t w o contr ol l oop s are used .The para meters are chosed by the perf or mance of servo sys 2te m.The reas onability and validity have been testified by si m ulate result and this novel method offers a ne w thought for designing and debugging actual mot or .Key words:Matlab /Si m ulink,NC servo syste m;P MS M ,si m ulati on0 引言数控机床的伺服系统一般由电流环和速度环组成[1]。
基于MATLAB控制系统仿真实验报告
tf 4
y0
0 1
6、求出 G1(s)
2 (s2 2s 1) 与 G2 (s)
1 (2s3
3s2
1)
的单位阶跃响应,并分别
求出状态空间模型。
解:(1) G1(s) 2 (s2 2s 1) 的状态空间模型求解如下:
function shiyan2 b1=[2];
D(z)
0.62(1 0.136z 1)(1 0.183z (1 0.045z 1)(1 0.53z 1)
1 )
分别用仿真算法得到系统在单位阶跃输入作用下的响应,系统在单位速度输
入是的输出响应。
解:(1)首先将 W1(s)转换为 W1(z),采样周期 T=0.2s,程序清单如下: function shiyan42 num=[10];den=[0.005 0.15 1 0]; ts=0.2;[nc,dc]=c2dm(num,den,ts)
INTRO(注意:intro 为一个用 MATLAB 语言编写的幻灯片程序,主要演示
常用的 MATLAB 语句运行结果。)
然后,根据现实出来的幻灯片右面按钮进行操作,可按 START——NEXT—
—NEXT 按钮一步步运行,观察。
3、自编程序并完成上机编辑,调试,运行,存盘:
(1)用 MATLAB 命令完成矩阵的各种运算,例如:
5、利用 ode23 或 ode45 求解线性时不变系统微分方程 y(t) Ay(t) ,并绘制出 y(t)
曲线,式中
A
0.5
1
1 0.5
t t0 t 如下: function xdot=fun21(t,x) A=[-0.5 1;-1 -0.5]; xdot=A*x; function fzsy22 t0=0;tf=4;tol=1e-6; x0=[0;1];trace=1; [t,x]=ode23('fun21',t0,tf,x0,tol,trace); plot(t,x) 得到的实验结果如下图所示:
基于MatlabSimulink和GUI的运动控制系统虚拟实验平台设计
谢谢观看
2、提高效率:通过计算机硬件虚拟实验平台进行实验,用户可以在短时间 内完成实验设计、模拟和测试等整个过程。此外,该平台还可以实现多用户同时 使用,提高了实验效率。
3、增强安全性:在虚拟环境中进行实验,可以避免由于误操作或者不规范 操作导致的设备损坏或者人员伤害,增强了实验的安全性。
4、丰富的实验资源:计算机硬件虚拟实验平台可以提供丰富的实验资源, 包括各种类型的CPU、内存、I/O接口等,可以满足不同用户的需求。
四、结论
计算机硬件虚拟实验平台的设计与实现具有重要的现实意义和实际应用价值。 该平台可以降低实验成本、提高实验效率、增强安全性以及提供丰富的实验资源。 为了实现该平台,我们需要选择合适的硬件设计工具、模拟和仿真工具、调试工 具和集成开
发环境等工具,并提供可视化工具帮助设计人员更好地理解和分析实验结果。 未来的计算机硬件虚拟实验平台将更加完善和强大,为计算机硬件设计和教育领 域提供更多的可能性。
2、智能控制:通过遥控器、手机App等设备控制家电设备,如空调、加湿器、 灯光、窗帘等;支持多种智能场景模式,如离家模式、会客模式、睡眠模式等; 将控制状态通过GUI界面实时展示给用户。
参考内容二
随着科学技术的发展,虚拟仿真实验平台已成为实验教学中的重要工具。虚 拟仿真实验平台可以为学生提供一个高度仿真的实验环境,帮助学生更好地理解 和掌握实验原理和方法。在众多虚拟仿真实验平台中,基于LabVIEW的平台设计 具有广泛的应用前景。
3、调试工具:调试工具可以帮助设计人员找出设计和实现中的错误。JTAG 是一种常用的调试工具,它可以用来调试硬件设计和软件代码。
4、集成开发环境(IDE):提供一个集成的开发环境,可以使得设计人员更 容易地进行设计和调试。该环境应包括编辑器、编译器、仿真器和调试器等工具。
MATLABSimulink和控制系统仿真实验报告
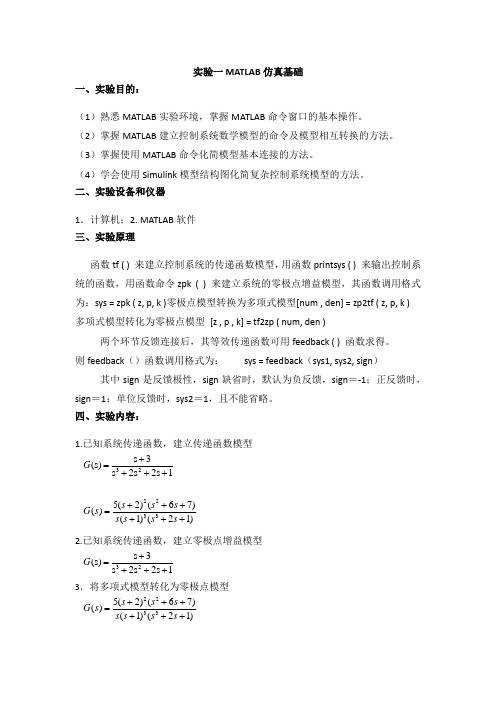
MATLAB/Simulink与控制系统仿真实验报告姓名:喻彬彬学号:K031541725实验1、MATLAB/Simulink 仿真基础及控制系统模型的建立一、实验目的1、掌握MATLAB/Simulink 仿真的基本知识;2、熟练应用MATLAB 软件建立控制系统模型。
二、实验设备电脑一台;MATLAB 仿真软件一个三、实验内容1、熟悉MATLAB/Smulink 仿真软件。
2、一个单位负反馈二阶系统,其开环传递函数为210()3G s s s =+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
3、某控制系统的传递函数为()()()1()Y s G s X s G s =+,其中250()23s G s s s+=+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
4、一闭环系统结构如图所示,其中系统前向通道的传递函数为320.520()0.11220s G s s s s s+=+++,而且前向通道有一个[-0.2,0.5]的限幅环节,图中用N 表示,反馈通道的增益为1.5,系统为负反馈,阶跃输入经1.5倍的增益作用到系统。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
四、实验报告要求实验报告撰写应包括实验名称、实验内容、实验要求、实验步骤、实验结果及分析和实验体会。
五、实验思考题总结仿真模型构建及调试过程中的心得体会。
题1、(1)利用Simulink的Library窗口中的【File】→【New】,打开一个新的模型窗口。
(2)分别从信号源库(Sourse)、输出方式库(Sink)、数学运算库(Math)、连续系统库(Continuous)中,用鼠标把阶跃信号发生器(Step)、示波器(Scope)、传递函数(Transfern Fcn)和相加器(Sum)4个标准功能模块选中,并将其拖至模型窗口。
控制系统建模与仿真基于MATLABSimulink的分析与实现

读书笔记
01 思维导图
03 精彩摘录 05 目录分析
目录
02 内容摘要 04 阅读感受 06 作者简介
思维导图
本书关键字分析思维导图
实现
通过
仿真
技术
进行
分析
方法
分析
matlabsi mulink
仿真
系统
simulink
实现
介绍
工程
精彩摘录
精彩摘录
《控制系统建模与仿真基于MATLABSimulink的分析与实现》精彩摘录 随着科技的发展和社会的进步,控制系统在各个领域中的应用越来越广泛, 掌握控制系统的建模与仿真技术对于科学研究、工程实践等方面都具有重要意义。 而《控制系统建模与仿真基于MATLABSimulink的分析与实现》这本书,正是为满 足这一需求而编写的。
阅读感受
而真正让我感到震撼的是第4章到第8章的内容。作者利用MATLAB强大数据处 理、绘图函数和Simulink仿真工具,对被控对象模型进行了系统建模、分析、计 算、性能指标的优化及控制器设计。从时域、频域、根轨迹、非线性及状态空间 几个方面,完成了对系统性能指标的验证及控制系统设计。这其中的细节和深度, 都足以显示作者对这一领域的深入理解和实践经验。
目录分析
在“仿真技术”部分,目录涵盖了控制系统仿真的基本原理、仿真模型的建 立、参数设置以及仿真结果的分析等内容。还介绍了如何利用MATLABSimulink进 行仿真,使得读者能够快速上手这一强大的仿真工具。
目录分析
“应用实例”部分通过多个具体的案例,展示了如何将建模与仿真技术应用 于实际控制系统。这些案例既有简单的单输入单输出系统,也有复杂的非线性多 输入多输出系统,具有很高的实用价值。
自动控制原理MATLAB仿真实验报告

实验一 典型环节的MATLAB 仿真 一、实验目的1.熟悉MATLAB 桌面和命令窗口,初步了解SIMULINK 功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、实验内容① 比例环节1)(1=s G 和2)(1=s G ;Simulink 图形实现:示波器显示结果:② 惯性环节11)(1+=s s G 和15.01)(2+=s s GSimulink 图形实现:示波器显示结果:③ 积分环节s s G 1)(1Simulink 图形实现:示波器显示结果:④ 微分环节s s G )(1Simulink 图形实现:波器显示结果:⑤ 比例+微分环节(PD )2)(1+=s s G 和1)(2+=s s G1)、G1(s )=s+2Simulink 图形实现:示波器显示结果:2)、G2(s)=s+1 Simulink图形实现:示波器显示结果:⑥ 比例+积分环节(PI )s s G 11)(1+=和s s G 211)(2+=1)、G1(1)=1+1/sSimulink 图形实现:示波器显示结果:2)G2(s)=1+1/2s Simulink图形实现:示波器显示结果:三、心得体会通过这次实验我学到了很多,对课本内容加深了理解,熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法,加深对各典型环节响应曲线的理解,这为对课程的学习打下了一定基础。
实验二线性系统时域响应分析一、实验目的1.熟练掌握step( )函数和impulse( )函数的使用方法,研究线性系统在单位阶跃、单位脉冲及单位斜坡函数作用下的响应。
2.通过响应曲线观测特征参量ζ和nω对二阶系统性能的影响。
3.熟练掌握系统的稳定性的判断方法。
二、实验内容1.观察函数step( )的调用格式,假设系统的传递函数模型为243237()4641s s G s s s s s ++=++++绘制出系统的阶跃响应曲线?2.对典型二阶系统222()2n n n G s s s ωζωω=++1)分别绘出2(/)n rad s ω=,ζ分别取0,0.25,0.5,1.0和2.0时的单位阶跃响应曲线,分析参数ζ对系统的影响,并计算ζ=0.25时的时域性能指标,,,,p r p s ss t t t e σ。
基于MATLABSimulink的控制系统设计与仿真

基于MATLABSimulink的控制系统设计与仿真控制系统设计是现代工程领域中至关重要的一部分,它涉及到对系统动态特性的分析、建模、控制器设计以及系统性能评估等方面。
MATLAB Simulink作为一款强大的工程仿真软件,在控制系统设计与仿真领域有着广泛的应用。
本文将介绍基于MATLAB Simulink的控制系统设计与仿真过程,包括系统建模、控制器设计、性能评估等内容。
1. 控制系统设计概述控制系统是通过对被控对象施加某种影响,使其按照既定要求或规律运行的系统。
在控制系统设计中,首先需要对被控对象进行建模,以便进行后续的分析和设计工作。
MATLAB Simulink提供了丰富的建模工具和仿真环境,可以帮助工程师快速准确地建立系统模型。
2. 系统建模在MATLAB Simulink中,可以利用各种不同的模块来构建系统模型,如传感器、执行器、控制器等。
通过简单拖拽这些模块并连接起来,就可以构建出完整的系统结构。
同时,Simulink还支持连续系统和离散系统的建模,可以方便地进行时域和频域分析。
3. 控制器设计控制器是控制系统中至关重要的一部分,它根据系统反馈信息对输出信号进行调节,以实现对被控对象的精确控制。
在MATLAB Simulink中,可以使用各种不同类型的控制器设计工具,如PID控制器、状态空间反馈控制器等。
通过这些工具,工程师可以快速设计出符合系统要求的控制器。
4. 性能评估在完成控制器设计后,需要对系统性能进行评估。
MATLAB Simulink提供了丰富的仿真功能,可以对系统进行动态响应、稳定性、鲁棒性等方面的评估。
通过仿真结果,工程师可以及时发现问题并进行调整优化。
5. 实例分析为了更好地说明基于MATLAB Simulink的控制系统设计与仿真过程,我们以一个温度控制系统为例进行分析。
首先建立被控对象的数学模型,然后设计PID控制器,并利用Simulink进行仿真验证。
最后根据仿真结果对系统性能进行评估,并进行必要的调整。
MATLAB控制系统各种仿真例题(包括simulink解法)
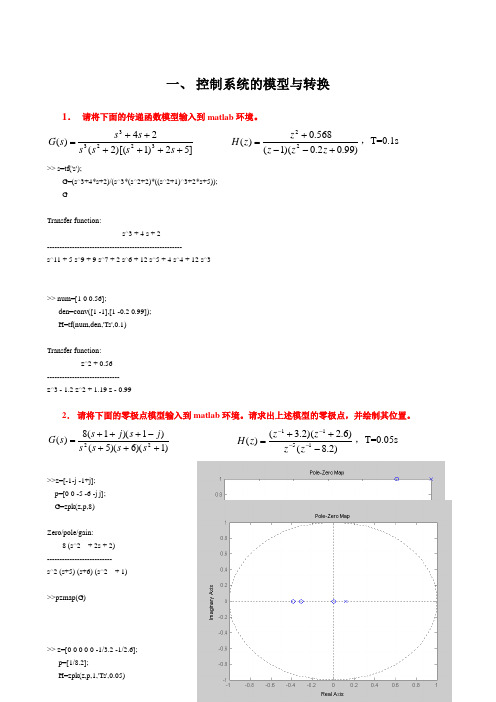
一、 控制系统的模型与转换1. 请将下面的传递函数模型输入到matlab 环境。
]52)1)[(2(24)(32233++++++=s s s s s s s G )99.02.0)(1(568.0)(22+--+=z z z z z H ,T=0.1s >> s=tf('s');G=(s^3+4*s+2)/(s^3*(s^2+2)*((s^2+1)^3+2*s+5)); GTransfer function:s^3 + 4 s + 2 ------------------------------------------------------ s^11 + 5 s^9 + 9 s^7 + 2 s^6 + 12 s^5 + 4 s^4 + 12 s^3>> num=[1 0 0.56];den=conv([1 -1],[1 -0.2 0.99]); H=tf(num,den,'Ts',0.1)Transfer function: z^2 + 0.56 ----------------------------- z^3 - 1.2 z^2 + 1.19 z - 0.992. 请将下面的零极点模型输入到matlab 环境。
请求出上述模型的零极点,并绘制其位置。
)1)(6)(5()1)(1(8)(22+++-+++=s s s s j s j s s G )2.8()6.2)(2.3()(1511-++=----z z z z z H ,T=0.05s>>z=[-1-j -1+j]; p=[0 0 -5 -6 -j j];G=zpk(z,p,8)Zero/pole/gain: 8 (s^2 + 2s + 2) -------------------------- s^2 (s+5) (s+6) (s^2 + 1)>>pzmap(G)>> z=[0 0 0 0 0 -1/3.2 -1/2.6]; p=[1/8.2];H=zpk(z,p,1,'Ts',0.05)Zero/pole/gain:z^5 (z+0.3125) (z+0.3846) ------------------------- (z-0.122)Sampling time: 0.05>>pzmap (H )二、 线性系统分析1. 请分析下面传递函数模型的稳定性。
基于MATLABSimulinkSimPowerSystems的永磁同步电机矢量控制系统建模与仿真
基于MATLABSimulinkSimPowerSystems的永磁同步电机矢量控制系统建模与仿真一、本文概述随着电力电子技术和控制理论的快速发展,永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因其高效率、高功率密度和优良的调速性能,在电动汽车、风力发电、机器人和工业自动化等领域得到了广泛应用。
然而,PMSM的高性能运行依赖于先进的控制系统,其中矢量控制(Vector Control, VC)是最常用的控制策略之一。
矢量控制,也称为场向量控制,其基本思想是通过坐标变换将电机的定子电流分解为与磁场方向正交的两个分量——转矩分量和励磁分量,并分别进行控制,从而实现电机的高性能运行。
这种控制策略需要对电机的动态行为和电磁关系有深入的理解,并且要求控制系统能够快速、准确地响应各种工况变化。
MATLAB/Simulink/SimPowerSystems是MathWorks公司开发的一套强大的电力系统和电机控制系统仿真工具。
通过Simulink的图形化建模环境和SimPowerSystems的电机及电力电子元件库,用户可以方便地进行电机控制系统的建模、仿真和分析。
本文旨在介绍基于MATLAB/Simulink/SimPowerSystems的永磁同步电机矢量控制系统的建模与仿真方法。
将简要概述永磁同步电机的基本结构和运行原理,然后详细介绍矢量控制的基本原理和坐标变换方法。
接着,将通过一个具体的案例,展示如何使用Simulink和SimPowerSystems进行永磁同步电机矢量控制系统的建模和仿真,并分析仿真结果,验证控制策略的有效性。
将讨论在实际应用中可能遇到的挑战和问题,并提出相应的解决方案。
通过本文的阅读,读者可以对永磁同步电机矢量控制系统有更深入的理解,并掌握使用MATLAB/Simulink/SimPowerSystems进行电机控制系统仿真的基本方法。
自动控制理论实验指导书(仿真).详解
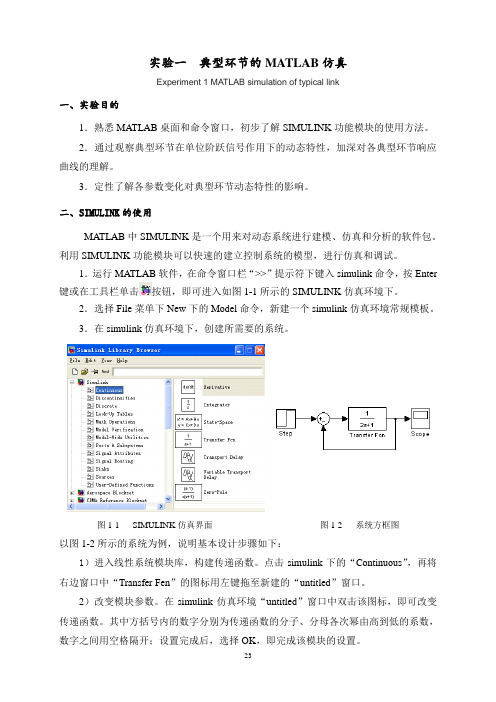
实验一典型环节的MATLAB仿真Experiment 1 MATLAB simulation of typical link一、实验目的1.熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、SIMULINK的使用MATLAB中SIMULINK是一个用来对动态系统进行建模、仿真和分析的软件包。
利用SIMULINK功能模块可以快速的建立控制系统的模型,进行仿真和调试。
1.运行MATLAB软件,在命令窗口栏“>>”提示符下键入simulink命令,按Enter 键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK仿真环境下。
2.选择File菜单下New下的Model命令,新建一个simulink仿真环境常规模板。
3.在simulink仿真环境下,创建所需要的系统。
以图1-2所示的系统为例,说明基本设计步骤如下:1)进入线性系统模块库,构建传递函数。
点击simulink下的“Continuous”,再将右边窗口中“Transfer Fen”的图标用左键拖至新建的“untitled”窗口。
2)改变模块参数。
在simulink仿真环境“untitled”窗口中双击该图标,即可改变传递函数。
其中方括号内的数字分别为传递函数的分子、分母各次幂由高到低的系数,数字之间用空格隔开;设置完成后,选择OK,即完成该模块的设置。
3)建立其它传递函数模块。
按照上述方法,在不同的simulink的模块库中,建立系统所需的传递函数模块。
例:比例环节用“Math”右边窗口“Gain”的图标。
4)选取阶跃信号输入函数。
用鼠标点击simulink下的“Source”,将右边窗口中“Step”图标用左键拖至新建的“untitled”窗口,形成一个阶跃函数输入模块。
基于MatlabSimulink的异步电机矢量控制系统仿真

基于Matlab/Simulink 的异步电机矢量控制系统仿真摘要在异步电机的数学模型分析中以及矢量控制系统的基础之上,利用Matlab/Simulink运用建立模块的思想分别组建了坐标变换模块、PI调节模块、转子磁链个观测模块、SVPWM等模块,然后将这些模块有机的结合,最后构成了异步电动机矢量控制的仿真模块,并且进行了仿真验证。
仿真结果分别显示了电机空载与负载情况下转矩、转速的动态变化曲线,验证了该方法的有效性、实用性,为电机在实际使用中打下了坚实的基础。
本文主要研究异步电机在矢量控制下的仿真。
使用Matlab/Simulink中的电气系统模块(PowerSystem Blocksets)将其重组得到新的模型并对其仿真,最后分析仿真结果得出结论。
关键词: 异步电机矢量控制 MATLAB/SIMULINK 变频调速目录摘要 (I)Abstract......................................................................................... 错误!未定义书签。
1 绪论 (1)1.1 电机及电力拖动技术的发展概况 (1)1.2 异步电动机的控制技术现状................................................. 错误!未定义书签。
1.3 仿真软件的简介及其选择..................................................... 错误!未定义书签。
1.4 论文的主要内容及结构安排................................................. 错误!未定义书签。
2 异步电动机的数学模型 (4)2.1 异步电动机的稳态数学模型 (4)2.2 异步电动机的动态数学模型 (5)2.3 本章小结 (7)3 矢量控制系统基本思路 (8)3.1 矢量控制的基本原理 (8)3.2 坐标变换 (9)3.3SVPWM调制 (21)3.3本章小结 (11)4 异步电机矢量控制系统仿真 (14)4.1矢量控制系统模型 (14)4.2仿真结果与分析 (15)4.5本章小结 (17)5结论与展望 (18)5.1结论 (18)5.2后续研究工作的展望 (19)参考文献 ....................................................................................... 错误!未定义书签。
自动控制原理实验1-6
实验一MATLAB 仿真基础一、实验目的:(1)熟悉MATLAB 实验环境,掌握MATLAB 命令窗口的基本操作。
(2)掌握MATLAB 建立控制系统数学模型的命令及模型相互转换的方法。
(3)掌握使用MATLAB 命令化简模型基本连接的方法。
(4)学会使用Simulink 模型结构图化简复杂控制系统模型的方法。
二、实验设备和仪器 1.计算机;2. MATLAB 软件 三、实验原理函数tf ( ) 来建立控制系统的传递函数模型,用函数printsys ( ) 来输出控制系统的函数,用函数命令zpk ( ) 来建立系统的零极点增益模型,其函数调用格式为:sys = zpk ( z, p, k )零极点模型转换为多项式模型[num , den] = zp2tf ( z, p, k ) 多项式模型转化为零极点模型 [z , p , k] = tf2zp ( num, den )两个环节反馈连接后,其等效传递函数可用feedback ( ) 函数求得。
则feedback ()函数调用格式为: sys = feedback (sys1, sys2, sign ) 其中sign 是反馈极性,sign 缺省时,默认为负反馈,sign =-1;正反馈时,sign =1;单位反馈时,sys2=1,且不能省略。
四、实验内容:1.已知系统传递函数,建立传递函数模型2.已知系统传递函数,建立零极点增益模型3.将多项式模型转化为零极点模型12s 2s s 3s (s)23++++=G )12()1()76()2(5)(3322++++++=s s s s s s s s G 12s 2s s 3s (s)23++++=G )12()1()76()2(5)(3322++++++=s s s s s s s s G4. 已知系统前向通道的传递函数反馈通道的传递函数求负反馈闭环传递函数5、用系统Simulink 模型结构图化简控制系统模型 已知系统结构图,求系统闭环传递函数 。
基于matlab simulink的控制系统仿真及应用

基于matlab simulink的控制系统仿真及应用Simulink是MATLAB的一个附加组件,它提供了一种可视化建模和仿真环境,主要用于控制系统、信号处理、通信系统等领域的建模和仿真。
以下是一个简单的基于Simulink的控制系统仿真的步骤:
1. 模型建立:首先,你需要使用Simulink库中的模块来构建你的控制系统模型。
这些模块包括输入、输出、控制算法等。
你可以直接从库中拖放模块到你的模型中,然后通过连接线将它们连接起来。
2. 参数设置:在连接模块后,你需要为每个模块设置适当的参数。
例如,对于传递函数模块,你需要输入分子和分母的系数。
3. 仿真设置:在完成模型和参数设置后,你需要设置仿真参数,例如仿真时间、步长等。
4. 运行仿真:最后,你可以运行仿真并查看结果。
Simulink提供了多种方式来查看结果,包括图形和表格。
在Simulink中,你可以使用许多内建的工具和函数来分析和优化你的控制系统。
例如,你可以使用MATLAB的控制系统工具箱中的函数来分析系统的稳定性、频率响应等。
总的来说,Simulink是一个强大的工具,可以用于设计和分析各种控制系统。
通过学习和掌握这个工具,你可以更有效地进行控制系统设计和仿真。
MATLABSimulink与控制系统仿真实验报告
MATLAB/Simulink 与控制系统仿真实验报告姓名:喻彬彬学号:K031541725实验1、MATLAB/Simulink 仿真基础及控制系统模型的建立一、实验目的1、掌握MATLAB/Simulink 仿真的基本知识;2、熟练应用MATLAB 软件建立控制系统模型。
二、实验设备电脑一台;MATLAB 仿真软件一个三、实验内容1、熟悉MATLAB/Smulink 仿真软件。
2、一个单位负反馈二阶系统,其开环传递函数为210()3G s s s =+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
3、某控制系统的传递函数为()()()1()Y s G s X s G s =+,其中250()23s G s s s+=+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
4、一闭环系统结构如图所示,其中系统前向通道的传递函数为320.520()0.11220s G s s s s s+=+++g ,而且前向通道有一个[-0.2,0.5]的限幅环节,图中用N 表示,反馈通道的增益为1.5,系统为负反馈,阶跃输入经1.5倍的增益作用到系统。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
四、实验报告要求实验报告撰写应包括实验名称、实验内容、实验要求、实验步骤、实验结果及分析和实验体会。
五、实验思考题总结仿真模型构建及调试过程中的心得体会。
题1、(1)利用Simulink的Library窗口中的【File】→【New】,打开一个新的模型窗口。
(2)分别从信号源库(Sourse)、输出方式库(Sink)、数学运算库(Math)、连续系统库(Continuous)中,用鼠标把阶跃信号发生器(Step)、示波器(Scope)、传递函数(Transfern Fcn)和相加器(Sum)4个标准功能模块选中,并将其拖至模型窗口。
基于matlabsimulink的pid控制器设计
基于matlabsimulink的pid控制器设计1.引言1.1 概述概述部分:PID控制器是一种常用的控制算法,它通过不断地调整系统的输出来使其尽量接近所期望的目标值。
在工业控制领域,PID控制器被广泛应用于各种工艺过程和自动化系统中。
本文将以MATLAB/Simulink为工具,探讨基于PID控制器的设计方法。
PID控制器以其简单易实现、稳定性好的特点,成为许多控制系统的首选。
在文章的正文部分,我们将对PID控制器的基本原理进行详细介绍,并结合MATLAB/Simulink的应用,展示如何使用这一工具来设计和实现PID控制器。
在控制系统设计中,PID控制器通过测量系统的误差,即期望输出值与实际输出值之间的差异,并根据三个控制参数:比例项(Proportional)、积分项(Integral)和微分项(Derivative)来调整系统的输出。
比例项控制系统的响应速度,积分项消除系统的稳态误差,微分项抑制系统的震荡。
MATLAB/Simulink作为一款功能强大的仿真软件,提供了丰富的控制系统设计工具。
它不仅可以帮助我们直观地理解PID控制器的工作原理,还可以实时地模拟和分析系统的响应。
通过使用MATLAB/Simulink,我们可以轻松地进行PID控制器参数调整、系统性能评估和控制算法的优化。
总之,本文旨在介绍基于MATLAB/Simulink的PID控制器设计方法,通过理论介绍和实例演示,帮助读者深入理解PID控制器的原理和应用,并为读者在实际工程项目中设计和实施PID控制器提供参考。
在结论部分,我们将总结所得结论,并对未来进一步研究的方向进行展望。
文章结构部分的内容可以描述文章的整体架构和各个部分的内容大纲。
以下是对文章1.2部分的内容补充:1.2 文章结构本文主要由以下几个部分构成:第一部分是引言部分,包括概述、文章结构和目的等内容。
在概述中,将简要介绍PID控制器在自动控制领域的重要性和应用背景。
基于MATLABSimulink的控制系统建模与仿真实践

基于MATLABSimulink的控制系统建模与仿真实践控制系统是现代工程领域中一个至关重要的研究方向,它涉及到对系统的建模、分析和设计,以实现对系统行为的控制和调节。
MATLAB Simulink作为一款强大的工程仿真软件,在控制系统领域有着广泛的应用。
本文将介绍基于MATLAB Simulink的控制系统建模与仿真实践,包括建立系统模型、进行仿真分析以及设计控制算法等内容。
1. 控制系统建模在进行控制系统设计之前,首先需要建立系统的数学模型。
MATLAB Simulink提供了丰富的建模工具,可以方便快捷地搭建系统模型。
在建模过程中,可以利用各种传感器、执行器、控制器等组件来描述系统的结构和功能。
通过连接这些组件,并设置其参数和初始条件,可以构建出一个完整的系统模型。
2. 系统仿真分析建立好系统模型后,接下来就是进行仿真分析。
MATLABSimulink提供了强大的仿真功能,可以对系统进行各种不同条件下的仿真实验。
通过改变输入信号、调节参数值等操作,可以观察系统在不同工况下的响应情况,从而深入理解系统的动态特性和性能指标。
3. 控制算法设计在对系统进行仿真分析的基础上,可以针对系统的性能要求设计相应的控制算法。
MATLAB Simulink支持各种常见的控制算法设计方法,如PID控制、状态空间法、频域设计等。
通过在Simulink中搭建控制算法,并与系统模型进行联合仿真,可以验证算法的有效性和稳定性。
4. 系统优化与调试除了基本的控制算法设计外,MATLAB Simulink还提供了优化工具和调试功能,帮助工程师进一步改进系统性能。
通过优化算法对系统参数进行调整,可以使系统响应更加迅速、稳定;而通过调试功能可以检测和排除系统中可能存在的问题,确保系统正常运行。
5. 实例演示为了更好地说明基于MATLAB Simulink的控制系统建模与仿真实践,接下来将通过一个简单的倒立摆控制系统实例进行演示。
华东交通大学 教材 MATLAB Simulink与控制系统仿真 王正林(第3版) 电子工业出版社matlab第1章

二、Simulink适合控制系统仿真的特点
Simulink是matlab重要软件包,用于动态系统仿真。
适用于连续系统和离散系统,也适用于线性系统和非线性系统。
它采用系统模块直观地描述系统典型环节,可方便地建立系统模 型而不需要花较多时间编程。 由于这些特点,Simulink广泛流行,是最受欢迎的仿真软件。
仿真的函数,进行系统仿真。
(2)直接在Simulink窗口进行面向系统结构方框图的系统仿真
这两种方式可解决任意复杂系统的动态仿真问题。
10
一、MATLAB适合控制系统仿真的特点
MATLAB具有以下主要特点,非常适合于控制系统的仿真 (1)强大的运算功能:向量、数组、矩阵、复数运算、 求解高次微分方程、常微分方程。 (2)特殊功能的TOOLBOX工具箱:算法包 (3)高效的编程效率:库函数 (4)简单易学的编程语言:脚本语言 (5)方便友好的编程环境
(2)安全
(3)快捷
(4)具有优化设计和预测的特殊功能
7
二、控制系统仿真
控制系统仿真是系统仿真的一个重要分支,它是一门涉及自动 控制理论、计算数学、计算机技术、系统辨识、控制工程以及 系统科学的综合性新型学科。 控制系统仿真是以控制系统模型为基础,采用数学模型替代实 际控制系统,以计算机为工具,对控制系统进行实验、分析、 评估及预测研究的一种技术与方法。 控制系统仿真通过控制系统的数学模型和计算方法,编写程序 运算语句,使之能自动求解各环节变量的动态变化情况,得到 关于系统输出和所需中间各变量的有关数据、曲线等,以实现 对控制系统性能指标的分析与设计。
13
寻求对真实过程的认识,它所遵循的基本原则是相似性原理。
2
一、计算机仿真基本概念
控制仿真实验报告
实验名称:基于MATLAB/Simulink的PID控制器参数优化仿真实验日期:2023年11月10日实验人员:[姓名]实验指导教师:[指导教师姓名]一、实验目的1. 理解PID控制器的原理及其在控制系统中的应用。
2. 学习如何使用MATLAB/Simulink进行控制系统仿真。
3. 掌握PID控制器参数优化方法,提高控制系统的性能。
4. 分析不同参数设置对系统性能的影响。
二、实验原理PID控制器是一种广泛应用于控制领域的线性控制器,它通过将比例(P)、积分(I)和微分(D)三种控制作用相结合,实现对系统输出的调节。
PID控制器参数优化是提高控制系统性能的关键。
三、实验内容1. 建立控制系统模型。
2. 设置PID控制器参数。
3. 进行仿真实验,分析系统性能。
4. 优化PID控制器参数,提高系统性能。
四、实验步骤1. 建立控制系统模型使用MATLAB/Simulink建立被控对象的传递函数模型,例如:```G(s) = 1 / (s^2 + 2s + 5)```2. 设置PID控制器参数在Simulink中添加PID控制器模块,并设置初始参数,例如:```Kp = 1Ki = 0Kd = 0```3. 进行仿真实验设置仿真时间、初始条件等参数,运行仿真实验,观察系统输出曲线。
4. 分析系统性能分析系统在给定参数下的响应性能,包括超调量、调节时间、稳态误差等指标。
5. 优化PID控制器参数根据分析结果,调整PID控制器参数,优化系统性能。
可以使用以下方法:- 试凑法:根据经验调整参数,观察系统性能变化。
- Ziegler-Nichols方法:根据系统阶跃响应,确定参数初始值。
- 遗传算法:使用遗传算法优化PID控制器参数。
6. 重复步骤3-5,直至系统性能满足要求五、实验结果与分析1. 初始参数设置初始参数设置如下:```Kp = 1Ki = 0Kd = 0```仿真结果如图1所示:从图1可以看出,系统存在较大的超调量和较长的调节时间,稳态误差较大。
自动控制原理MATLAB仿真实验指导书(4个实验)
自动控制原理MATLAB仿真实验实验指导书电子信息工程教研室实验一典型环节的MA TLAB仿真一、实验目的1.熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、SIMULINK的使用MATLAB中SIMULINK是一个用来对动态系统进行建模、仿真和分析的软件包。
利用SIMULINK功能模块可以快速的建立控制系统的模型,进行仿真和调试。
1.运行MA TLAB软件,在命令窗口栏“>>”提示符下键入simulink命令,按Enter键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK仿真环境下。
2.选择File菜单下New下的Model命令,新建一个simulink仿真环境常规模板。
图1-1 SIMULINK仿真界面图1-2 系统方框图3.在simulink仿真环境下,创建所需要的系统。
以图1-2所示的系统为例,说明基本设计步骤如下:1)进入线性系统模块库,构建传递函数。
点击simulink下的“Continuous”,再将右边窗口中“Transfer Fen”的图标用左键拖至新建的“untitled”窗口。
2)改变模块参数。
在simulink仿真环境“untitled”窗口中双击该图标,即可改变传递函数。
其中方括号内的数字分别为传递函数的分子、分母各次幂由高到低的系数,数字之间用空格隔开;设置完成后,选择OK,即完成该模块的设置。
3)建立其它传递函数模块。
按照上述方法,在不同的simulink的模块库中,建立系统所需的传递函数模块。
例:比例环节用“Math”右边窗口“Gain”的图标。
4)选取阶跃信号输入函数。
用鼠标点击simulink下的“Source”,将右边窗口中“Step”图标用左键拖至新建的“untitled”窗口,形成一个阶跃函数输入模块。