机器人学导论第5章1
机器人学 完整版
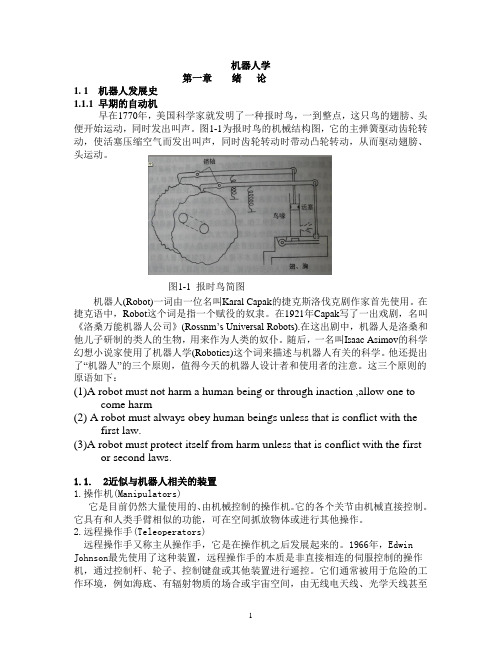
机器人学第一章绪论1. 1 机器人发展史1.1.1 早期的自动机早在1770年,美国科学家就发明了一种报时鸟,一到整点,这只鸟的翅膀、头便开始运动,同时发出叫声。
图1-1为报时鸟的机械结构图,它的主弹簧驱动齿轮转动,使活塞压缩空气而发出叫声,同时齿轮转动时带动凸轮转动,从而驱动翅膀、头运动。
图1-1 报时鸟简图机器人(Robot)一词由一位名叫Karal Capak的捷克斯洛伐克剧作家首先使用。
在捷克语中,Robot这个词是指一个赋役的奴隶。
在1921年Capak写了一出戏剧,名叫《洛桑万能机器人公司》(Rossnm’s Universal Robots).在这出剧中,机器人是洛桑和他儿子研制的类人的生物,用来作为人类的奴仆。
随后,一名叫Isaac Asimov的科学幻想小说家使用了机器人学(Robotics)这个词来描述与机器人有关的科学。
他还提出了“机器人”的三个原则,值得今天的机器人设计者和使用者的注意。
这三个原则的原语如下:(1)A robot must not harm a human being or through inaction ,allow one tocome harm(2) A robot must always obey human beings unless that is conflict with thefirst law.(3)A robot must protect itself from harm unless that is conflict with the firstor second laws.1.1.2近似与机器人相关的装置1.操作机(Manipulators)它是目前仍然大量使用的、由机械控制的操作机。
它的各个关节由机械直接控制。
它具有和人类手臂相似的功能,可在空间抓放物体或进行其他操作。
2.远程操作手(Teleoperators)远程操作手又称主从操作手,它是在操作机之后发展起来的。
机器人学导论第4版课后答案第五章

机器人学导论第4版课后答案第五章在机械传动的系统中,摩擦是必不可少的。
利用这种摩擦进行制动器运动和驱动传动,可使机械传动系统中的齿轮保持不变。
此外,通过磨擦还可产生机械震动和压力。
如果使驱动元件和传动件在轴上接触而摩擦时产生了热量,则会引起零部件上的油质过氧化,同时因摩擦带来的热量也会被传递到空气中去,这就是所谓的油氧化反应。
油氧化反应发生时产生各种化学作用和物理效应,如:油脂氧化、氧自由基分解以及其他一些化学反应。
为了降低能源消耗,人们就利用电磁铁等辅助设备进行电机和直流电弧的电磁场传播及热能的传递。
同时使用电动机带动机械装置实现制动与转动(用滚动轴承代替齿轮驱动机械装置)、滑动变速等过程。
(1)润滑在机械传动系统中的作用润滑是机械传动系统得以正常运行和保证精度的重要保证,也是重要的节能措施。
在机械传动系统中,一般可分为两种类型:①摩擦式:利用轴承上的油脂润滑滚动轴承运转的方法;②滑动式:利用滑动轴承外圈与滚珠之间的摩擦力来驱动运转。
摩擦式与滑动轴承摩擦力大,但传动精度高。
滑动式以滑动轴承为轴心轴向进行传动,由于摩擦产生的热量可传递到空气中去。
滑动式利用液体润滑元件代替了滚动轴承;滑动式同时也由润滑元件代替了滑动轴承和滚珠轴承。
(2)根据润滑与传热的关系,将滑动变速法分为()。
A.摩擦-传热:利用润滑系统中摩擦材料不产生热量,仅在零件表面形成均匀温润的油膜以增加润滑强度。
B.电弧摩擦:利用电弧来能量传递。
C.电磁力摩擦:利用电磁力来改变电动机的转速使其不停转动(转)。
D.机械滑动变速法:利用机械滑动来改变电动机和负载之间的转速。
【答案】 B 【解析】根据润滑与传热关系,将滑动变速法分为摩擦-传热-滚动-制动-滑动变速法)。
故本题选 B.。
本题中轴承润滑与传热均起到传热传质等作用,因此不属于滑动变速法。
(3)下面我们来具体介绍一下摩擦原理中的摩擦现象是怎样发展来的:早在18世纪,英国天文学家便发现了太阳系的中心——日心在东偏南方向上移动得很快的现象,这被认为是太阳系诞生时一个重要的物理现象。
(人工智能)人工智能机器人学导论
(人工智能)人工智能机器人学导论人工智能机器人学导论1简介:1作者简介2机器人控制器和程序设计3简介:3机器人制作入门篇6简介:6作者简介6机器人智能控制工程8简介:8人工智能机器人学导论作者:Ricky文章来源:本站原创更新时间:2006年05月03日打印此文浏览数:2370 SlidesforSecondEdition(Beta)Chapter1:WhatareRobots?.pptslidesandthepdfversion(goodaquicklook) Chapter2:Telesystems.thepdfversionChapter3:BiologicalFoundationsoftheReactiveParadigm.pptslidesandpdfversion Chapter5:TheReactiveParadigmChapter6:SelectingandCombiningBehaviorsChapter7:CommonSensorsandSensingTechniquesChapter8:DesigningaBehavior-BasedImplementationChapter9:Multi-AgentsChapter10:NavigationandtheHybridParadigmChapter11:TopologicalPathPlanningChapter12:MetricPathPlanningChapter13:LocalizationandMappingChapter14:AffectiveRobotsChapter15:Human-RobotInteractionChapter16:WhatCanRobotDoandWhatWillTheyBeAbletoDo?简介:本书系统地介绍了人工智能机器人于感知、导航、路径规划、不确定导航等领域的主要内容。
全书共分俩大部分。
机器人学导论第五章
ω
写出例5.3中的雅克比矩阵 由例5.3的结果 式(5-55)可写出坐标系{3} 的雅克比表达式
3
l1s2 J θ l1c2 l2
0 l2
(5-66)
式(5-57)可写出坐标系{0}的雅克比表达式
3
- l1s1 l2 s12 J θ l1c1 l2c12
雅克比矩阵的定义为
建立连杆坐标系,图5-11为施加在连杆i 上的静力和静力矩(重力除外)。将这 些力相加并令其和为0,有
图5-11单连杆的静力和静力矩的平衡关系
将绕坐标系{i}原点的力矩相加,有 如果我们从施加于手部的力和力矩的描述开始,从 末端连杆到基座进行计算就可以计算出作用于每一 个连杆上的力和力矩。将以上两式重新整理,以便 从高序号连杆向低序号连杆进行迭代求解。结果如 下
例5.3 图5-8所示是具有两个转动关节的操作 臂.计算出操作臂末端的速度,将它表达成操作 臂末端的函数。给出两种形式的解答,一种是 用坐标系{3}表示,一种是用坐标系{0}表示。
图5-8两连杆操作臂
图5-9两连杆操作臂的坐标系布局
首先将坐标系固连在连杆上,计算连杆变换如 下
c1 s 1 0 T 1 0 0 s1 0 0 c1 0 0 0 1 0 0 0 1
机器人学导论
第五章 静力和速度
——新疆大学机械工程学院
第五章 速度和静力
概述 在本章中,我们将机器人操作臂的讨论扩展到静 态位置问题以外。我们研究刚体线速度和角速 度的表示方法并且运用这些概念去分析操作臂 的运动。我们将讨论作用在刚体上的力,然后 应用这些概念去研究操作臂静力学应用的问题。 关于速度和静力的研究将得出一个称为操作臂雅 克比的实矩阵。
机器人学导论第5章1

( t
0) 0)
i 0
c0 c1
从而给出抛物线段的方程为:
( t ) c 2
c0 c1
i 0
c 2
(t) i (t )
1c 2 c 2t
2t 2
( t ) c 2
显然,对于直线段,速度将保持为常值,它可以根据
驱动器的物理性能来加以选择。将零出速度、线性段
(t)
c0
c1t
1 2
c 2t2
位置为 i 和 f ,抛物线与直线 部分的过渡段在时间tb和tf-tb处是 对称的,因此可得:
(t ) ( t )
c1 c2
c 2t
显然,这个抛物线运动段的加速度是一常数,并在公共点A
和B上产生连续的速度。将边界条件代入抛物线段的方程,
得到:
(t
(ti) c1 0 (tf ) c1 2c2(5)3c3(52) 0
c0 30 c1 0 c2 5 .4 c 3 0 . 72
由此得到位置,速度和加速度的多项式方程如下:
t305.4t2 0.72t3 t10.8t 2.16t2 t10.84.32t
(1 ) 34 . 68 ( 2 ) 45 . 84 ( 3 ) 59 . 16 ( 4 ) 70 . 32
为实现一条直线轨迹,必须计算起点和终点位姿 之间的变换,并将该变换划分许多小段可通过下面的方程进行 计算:
T f TiR
Ti 1T f Ti 1Ti R
R Ti 1T f
至少有以下三种不同方法可用来将该总变换化为 许多的小段变换。
(1) 希望在起点和终点之间有平滑的线性变换,因 此需要大量很小的分段,从而产生了大量的微分运动。 利用上一章导出的微分运动方程,可将末端手坐标系 在每个新段的位姿与微分运动、雅可比矩阵及关节速 度通过下列方程联系在一起。
(人工智能)人工智能机器人学导论
(人工智能)人工智能机器人学导论人工智能机器人学导论1简介:1作者简介2机器人控制器和程序设计3简介:3机器人制作入门篇6简介:6作者简介6机器人智能控制工程8简介:8人工智能机器人学导论作者:Ricky文章来源:本站原创更新时间:2006年05月03日打印此文浏览数:2370 SlidesforSecondEdition(Beta)Chapter1:WhatareRobots?.pptslidesandthepdfversion(goodaquicklook) Chapter2:Telesystems.thepdfversionChapter3:BiologicalFoundationsoftheReactiveParadigm.pptslidesandpdfversion Chapter5:TheReactiveParadigmChapter6:SelectingandCombiningBehaviorsChapter7:CommonSensorsandSensingTechniquesChapter8:DesigningaBehavior-BasedImplementationChapter9:Multi-AgentsChapter10:NavigationandtheHybridParadigmChapter11:TopologicalPathPlanningChapter12:MetricPathPlanningChapter13:LocalizationandMappingChapter14:AffectiveRobotsChapter15:Human-RobotInteractionChapter16:WhatCanRobotDoandWhatWillTheyBeAbletoDo?简介:本书系统地介绍了人工智能机器人于感知、导航、路径规划、不确定导航等领域的主要内容。
全书共分俩大部分。
机器人学导论:分析、控制及应用(第二版)

机器人学导论:分析、控制及应用(第二版)
《机器人学导论:分析、控制及应用(第二版)》是由日本机器人学大师Tomizuka Masayoshi编写的一本机器人学教材,旨在介绍机器人的基本原理、运动学、动力学、控
制技术等方面的知识。
本书内容详实、全面,适合机器人学、控制工程、机械工程、自动
化等专业的学生和从业人员学习使用。
本书主要分为四个部分,分别介绍机器人的基本概念、机器人的运动学和动力学、机
器人的控制技术以及机器人的应用。
其中基本概念包括机器人的概述、机器人的结构、运
动规划、感知与反馈等方面;运动学和动力学包括机器人的运动学、力学、运动控制等方面;控制技术包括机器人的控制模型、控制策略、控制算法、力控制、触觉反馈等方面;
应用包括机器人的应用领域、工业机器人、服务机器人、医疗机器人、一体化机器人等方面。
本书作者根据自己多年的教学和研究经验,整理出了系统而严谨的机器人学知识体系,涉及了机器人运动规划、运动控制、力控制、感知与反馈等方面。
同时,本书也涉及了一
些最新的机器人应用领域,比如服务机器人、医疗机器人以及一体化机器人等。
通过本书
的学习,读者不仅能够掌握机器人学的基本理论和知识,还能够了解最新的机器人应用趋势,提高自身的机器人应用技能。
总之,《机器人学导论:分析、控制及应用(第二版)》是一本很好的机器人学教材,不仅对于学生的学习有很大的帮助,对于从业人员的工作也有很大的指导作用。
好的学习
文献能够帮助我们更好地了解机器人学的基本概念、原理和应用,从而在未来的机器人领
域中更好地创造和创新。
机器人学导论
机器人的动力学模型
牛顿-欧拉方程
拉格朗日方程
凯恩方法
雅可比矩阵
机器人的运动规划与控制
运动学:研究机器人末端执行器的位置和姿态信息 动力学:研究机器人末端执行器的力和力矩信息 运动规划:根据任务要求,规划机器人的运动轨迹 控制:通过控制器对机器人进行实时控制,实现运动规划
机器人的感知与感
05
知融合
01
添加章节标题
02
机器人学概述
机器人的定义与分类
机器人的定义: 机器人是一种能 够自动执行任务 的机器系统,具 有感知、决策、
执行等能力
机器人的分类: 根据应用领域、 结构形式、智能 化程度等不同, 机器人可分为多 种类型,如工业 机器人、服务机 器人、特种机器
人等
机器人学的研究领域
机器人设计:研究机器人的结构、 运动学和动力学
机器人的感知技术
添加项标题
视觉感知技术:通 过摄像头获取环境 信息,识别物体、 场景等,实现机器 人视觉导航、物体 识别等功能。
添加项标题
听觉感知技术:通 过麦克风获取声音 信息,识别语音、 音乐等,实现机器 人语音交互、音乐 识别等功能。
添加项标题
触觉感知技术:通过 触觉传感器获取接触 信息,识别物体的形 状、大小、硬度等, 实现机器人触觉导航、 物体抓取等功能。
执行器作用:根据控制信号执行相应的动作,如移动、转动等
机器人的感知系统
传感器类型:视觉、听觉、触觉等 传感器工作原理:图像处理、语音识别、触觉反馈等 传感器在机器人中的应用:导航、目标识别、物体抓取等 感知系统对机器人性能的影响:精度、稳定性、安全性等
机器人的运动学与
04
动力学
机器人的运动学方程
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3. 多点的情况 (1)从A向B先加速,再匀速,接近B时再减速, 从B到C再重复。为避免这一过程中不必要的停 止动作,可将B点两边的动作进行平滑过渡。机 器人先抵达B点,然后沿着平滑过渡的路径重新 加速,最终抵达并停止在C点。
(2)考虑到由于采用了平滑过渡曲线,机器人经 过的可能不是原来的B点,可事先设定一个不同 的B’’点,使曲线正好经过B点。
(t ) c0 c1t c2t 2 c3t 3 c4t 4 c5t 5
(t ) c1 2c2t 3c3t 2 4c4t 3 5c5t 4 (t ) 2c2 6c3t 12c4t 2 20c5t 3
根据这些方程,可以通过位置、速度和加速度 边界条件计算出五次多项式的系数。
max f i f
t f c2 t f t 2 其中c2
1 2
tb
2 (t f t ) (t ) f 2tb (t ) (t t ) f tb (t ) tb
1 2 3 4 5
(t ) 2c2 6c3t 12c4t 2 20c5t 3
中,得出: c1 0 c0 30 c4 0.58 c3 1.6 进而得到如下运动方程 :
c2 2.5 c5 0.0464
(t ) 30 2.5t 2 1.6t 3 0.58t 4 0.0464t 5 (t ) 5t 4.8t 2 2.32t 3 0.232t 4
t c1 2c2t 3c t 2
3
对 t c0 c1t c2t 2 c 3 t 3求一阶导数得到:
将初始和末端条件代入 得到: ti C0 i ti C1 0
3
t f C0 C1t f C2t f 2 C t f 3 f
(t ) 5 9.6t 6.96t 2 0.928t 3
关节位置、速度和加速度图形
三、抛物线过渡的线性运动轨迹
如果机器人关节以恒定速度运动,那么轨迹方程就相当于 一次多项式,其速度是常数,加速度为0,这说明在起点和终 点,加速度为无穷大,只有这样才可以瞬间达到匀速状态。但 很显然这是不可能的,因此在起点和终点处,可以用抛物线来 进行过渡。如图所示
1 2 假设ti和 tf时刻对应的起点和终点 (t ) c0 c1t 2 c2t 位置为 i 和 f ,抛物线与直线 (t ) c1 c2t 部分的过渡段在时间tb和tf-tb处是 (t ) c2 对称的,因此可得:
显然,这个抛物线运动段的加速度是一常数,并在公共点A 和B上产生连续的速度。将边界条件代入抛物线段的方程, 得到:
解:
t C0 C1t C2t 2 C t 3
t C1 2C2t 3C t 2
3 3
(t ) 2C2 6C3t 其中 ti 0 tf 3 可以求得
i 75 f 105
i 0 f 0
(t ) 75 10t 2 2.222t 3 (t ) 20t 6.666t 2
一 关节空间的轨迹规划 1. 计算起点和终点的关节变量,各关节都以最大角 速度运动 特点:轨迹不规则,末端走过的距离不均匀,且各 关节不是同时到达。
A
B
2. 在1的基础上对关节速率做归一化处理,使各关 节同时到达终点。 特点:各关节同时到达终点,轨迹各部分比较均 衡,但所得路径仍然是不规则的。
A
B
0
f
三 轨迹规划的分类
§5.4 关节空间的轨迹规划
一、 三次多项式的轨迹规划 我们假设机器人某一关节的运动方程是三次的
t c0 c1t c2t 2 c t 3
3
这里初始和末端条件是 :
(ti ) i (t f ) f
(ti ) 0 (t f ) 0
(t ) 20 13.332t
进而可以画出以下曲线
max
4( f i ) (t f ti ) 2
为保证 机器人 的加速 度不超 过其自 身能力, 应考虑 加速度 的限制。
根据此式可计算出达到目标所需 要的时间
二、 五次多项式轨迹规划 同例5.1,若采用五次多项式,若再已知初始 加速度和末端减速度均为5 度/秒2 ,其他条件不变, 试画出三条相应曲线。(边界条件变为6个)
(3) 在B点前后各加过渡点D,E,使得B点落在DE上。
1) 对于点位作业机器人,需要描述它的起始状态和 目标状态。如果用 表示工具坐标系的起始值, T 表示目标值,就是表示这两个值的相对关系。 T 这种运动称为点到点运动(PTP) 2) 对于弧焊、研磨、抛光等曲面作业,不仅要规定 起始点和终止点,还要规定中间整个运动过程。对 于一段连续运动过程,理论上无法精确实现,实际 上是选取一定数量(满足轨迹插补精度)的点作为中 间点,从而近似实现沿给定的路径运动。 这种运动称为连续路径运动或轮廓运动(CP) 3) 障碍约束轨迹规划
5.2 关节空间描述与直角空间描述
1 关节空间描述 如果给定机器人运动的起点和终点,就可以利用逆 运动学方程计算出每个关节的矢量角度值;然后机 器人控制器驱动关节电机运动使机器人到达相应的 位置。这种以关节角度的函数来描述机器人轨迹的 方法称为关节空间法。 特点:在机器人运动的过程中,中间状态是不可知 的,但计算量较小,不会出现奇异点 。
2 直角坐标空间描述 将轨迹分成若干段,使机器人的运动经过这些中间 点,在每一点都求解机器人的关节变量,直到到达 终点,如下图所示:
直角空间描述
特点:路径可控且可预知,直观、容易看到机器人 末端轨迹;但计算量大,容易出现奇异点,如下图 所示:
轨迹穿过 机器人自 身
关节值突变
§5.3 轨迹规划的基本原理
进而由上式可以解得过渡时间:
i f t f tb
显然,t b 不能大于总时间 t f 的一半,否则在整个过程中 将没有直线运动段而只有抛物线加速和抛物线减速段。 2( ) / t 由上式可以计算出对应的最大速度 。应该 ta 说明,如果运动段的初始时间不是0而是 ,则可采用 平移时间轴的办法使初始时间为0。终点的抛物线段是 对称的,只是其加速度为负。因此可表示为:
A i c2 t b 2 B A t f tb tb A t f 2tb
B A f B A i f 0
由上式可以求解过渡时间:
c2 2 tb f i tb t f 2tb t 2 b f i c2tb t f 2tb
二 直角坐标空间轨迹规划 1. 首先画出路径,接着将路径n等分(为了获得较好 的沿循精度,n越大越好) ,分别计算到达各点所需 的关节变量。 特点:关节角非均匀变化,末端沿已知路径行走。
2. 在1的基础上,考虑各关节的加速减速时间,为 防止在加速期间轨迹落后于设想的轨迹,在划分分 界点时,如果是直线轨迹,就按照方程划分。曲线 轨迹就相对复杂一些。
i 30o f 75
i 0度 / 秒 f 0度 / 秒
i 5度 / 秒2 f 5度 / 秒2
将初始和末端条件代入 (t ) c0 c1t c2t 2 c3t 3 c4t 4 c5t 5 (t ) c 2c 3c t 2 4c t 3 5c t 4
从而给出抛物线段的方程为:
显然,对于直线段,速度将保持为常值,它可以根据 驱动器的物理性能来加以选择。将零出速度、线性段 以及零末端速度代入 (t ) 1 c t 和 (t) 中, ct 常值速度 2 可以得到A、B点以及终点的关节位置和速度如下:
2 i 2
2
1 2 A c2 t b
t f C1 2C2t f 3C t f 2 0
3
从上例可以看出,若我们已知开始和终止时刻 的角度以及角速度,那么就可以求得 ci ,进而求 得关节的运动方程。
尽管每一个关节都是分别计算的,但是在实际 控制中,所有关节自始至终都是同步运动; 如果机器人初始和末端速度不为零,可以通过 给定数据得到未知数值;
解:由题意可得到
(ti ) c0 30
(ti ) c1 0 (t f ) c1 2c2 (5) 3c3 (52 ) 0
o 2 3 o
(t f ) c0 c1 (5) c2 (5 ) c3 (5 ) 75
c0 30 c1 0 c 2 5 .4 c3 0.72
如果要求机器末端人依次通过两个以上的点, 则每一段求解出的边界速度和位置均可作为下一段 的初始条件,其余相同;
位置、速度连续,但是加速度不连续。
例5.1:已知一个关节在5秒之内从初始角30度运动 到终端角75度,使用三次多项式计算在第1,2,3, 4秒时关节的角度。(我们假设在开始和终止的瞬 间关节的速度是0)
(t 0) i c0 c0 i (t 0) 0 c1 c1 0 c (t ) c2 2 1 2 (t ) i 2 c2t (t ) c2t (t ) c 2
例题:若已知某关节以速度 1 =10度/秒在5秒内从 初始角i 30运动到目的角 f 70 。求解所需的过渡 时间并绘制位置、速度和加速度曲线。
解:代入相应公式可得到
i f t f tb 1s 由 i到 A ,由 A到 B ,由 B到 f 的方程如下所示 30 5t 2 10t 10