信号与系统奥本海默第二版第6章
奥本海姆目录
《信号与系统》第1章信号与系统1.0 引言1.1 连续时间和离散时间信号1.1.1 举例与数学表示1.1.2 信号能量与功率1.2 自变数的变换1.2.1 自变数变换举例1.2.2 周期信号1.2.3 偶信号与奇信号1.3 指数信号与正弦信号1.3.1 连续时间复指数信号与正弦信号1.3.2 离散时间复指数信号与正弦信号1.3.3 离散时间复指数序列的周期性质1.4 单位冲激与单位阶跃函数1.4.1 离散时间单位脉冲和单位阶跃序列1.4.2 连续时间单位阶跃和单位冲激函数1.5 连续时间和离散时间系统1.5.1 简单系统举例1.5.2 系统的互联1.6 基本系统性质1.6.1 记忆系统与无记忆系统1.6.2 可逆性与可逆系统1.6.3 因果性1.6.4 稳定性1.6.5 时不变性1.6.6 线性1.7 小结习题第2章线性时不变系统2.0 引言2.1 离散时间LTI系统:卷积和2.1.1 用脉冲表示离散时间信号2.1.2 离散时间LTI系统的单位脉冲响应及卷积和表示2.2 连续时间LTI系统:卷积积分2.2.1 用冲激表示连续时间信号2.2.2 连续时间LTI系统的单位冲激响应及卷积积分表示2.3 线性时不变系统的性质2.3.1 交换律性质2.3.2 分配律性质2.3.3 结合律性质2.3.4 有记忆和无记忆LTI系统2.3.5 LTL系统的可逆性2.3.6 LTI系统的因果性2.3.7 LTI系统的稳定性2.3.8 LTI系统的单位阶跃响应2.4 用微分和差分方程描述的因果LTI系统2.4.1 线性常系数微分方程2.4.2 线性常系数差分方程2.4.3 用微分和差分方程描述的一阶系统的方框图表示2.5 奇异函数2.5.1 作为理想化短脉冲的单位冲激2.5.2 通过卷积定义单位冲激2.5.3 单位冲激偶和其它的奇异函数2.6 小结习题第3章周期信号的傅里叶级数表示3.0 引言3.1 历史回顾3.2 LTI系统对复指数信号的响应3.3 连续时间周期信号的傅里叶级数表示3.3.1 成谐波关系的复指数信号的线性组合3.3.2 连续时间周期信号傅里叶级数表示的确定3.4 傅里叶级数的收敛3.5 连续时间傅里叶级数性质3.5.1 线性3.5.2 时移性质3.5.3 时间反转3.5.4 时域尺度变换3.5.5 相乘3.5.6 共轭及共轭对称性3.5.7 连续时间周期信号的帕斯瓦尔定理3.5.8 连续时间傅里叶级数性质列表3.5.9 举例3.6 离散时间周期信号的傅里叶级数表示3.6.1 成谐波关系的复指数信号的线性组合3.6.2 周期信号傅里叶级数表示的确定3.7 离散时间傅里叶级数性质3.7.1 相乘3.7.2 一阶差分3.7.3 离散时间周期信号的帕斯瓦尔定理3.7.4 举例3.8 傅里叶级数与LTI系统3.9 滤波3.9.1 频率成形滤波器3.9.2 频率选择性滤波器3.10 用微分方程描述的连续时间滤波器举例3.10.1 简单RC低通滤波器3.10.2 简单RC高通滤波器3.11 用差分方程描述的离散时间滤波器举例3.11.1 一阶递归离散时间滤波器3.11.2 非递归离散时间滤波器3.12 小结习题第4章连续时间傅里叶变换4.0 引言4.1 非周期信号的表示:连续时间傅里叶变换4.1.1 非周期信号傅里叶变换表示的导出4.1.2 傅里叶变换的收敛4.1.3 连续时间傅里叶变换举例4.2 周期信号的傅里叶变换4.3 连续时间傅里叶变换性质4.3.1 线性4.3.2 时移性质4.3.3 共轭及共轭对称性4.3.4 微分与积分4.3.5 时间与频率的尺度变换4.3.6 对偶性4.3.7 帕斯瓦尔定理4.4 卷积性质4.4.1 举例4.5 相乘性质4.5.1 具有可变中心频率的频率选择性滤波4.6 傅里叶变换性质和基本傅里叶变换对列表4.7 由线性常系数微分方程表征的系统4.8 小结习题第5章离散时间傅里叶变换5.0 引言5.1 非周期信号的表示:离散时间傅里叶变换5.1.1 离散时间傅里叶变换的导出5.1.2 离散时间傅里叶变换举例5.1.3 关于离散时间傅里叶变换的收敛问题5.2 周期信号的傅里叶变换5.3 离散时间傅里叶变换性质5.3.1 离散时间傅里叶变换的周期性5.3.2 线性5.3.3 时移与频移性质5.3.4 共轭与共轭对称性5.3.5 差分与累加5.3.6 时间反转5.3.7 时域扩展5.3.8 频域微分5.3.9 帕斯瓦尔定理5.4 卷积性质5.4.1 举例5.5 相乘性质5.6 傅里叶变换性质和基本傅里叶变换对列表5.7 对偶性5.7.1 离散时间傅里叶级数的对偶性5.7.2 离散时间傅里叶变换和连续时间傅里叶级数之间的对偶性5.8 由线性常系数差分方程表征的系统5.9 小结习题第6章信号与系统的时域和频域特性6.0 引言6.1 傅里叶变换的模和相位表示6.2 LTI系统频率响应的模和相位表示6.2.1 线性与非线性相位6.2.2 群时延6.2.3 对数模和波特图6.3 理想频率选择性滤波器的时域特性6.4 非理想滤波器的时域和频域特性讨论6.5 一阶与二阶连续时间系统6.5.1 一阶连续时间系统6.5.2 二阶连续时间系统6.5.3 有理型频率响应的波特图6.6 一阶与二阶离散时间系统6.6.1 一阶离散时间系统6.6.2 二阶离散时间系统6.7 系统的时域分析与频域分析举例6.7.1 汽车减震系统的分析6.7.2 离散时间非递归滤波器举例6.8 小结习题第7章采样7.0 引言7.1 用信号样本表示连续时间信号:采样定理7.1.1 冲激串采样7.1.2 零阶保持采样7.2 利用内插由样本重建信号7.3 欠采样的效果:混迭现象7.4 连续时间信号的离散时间处理7.4.1 数字微分器7.4.2 半采样间隔延时7.5 离散时间信号采样7.5.1 脉冲串采样7.5.2 离散时间抽取与内插7.6 小结习题第8章通信系统8.0 引言8.1 复指数与正弦幅度调制8.1.1 复指数载波的幅度调制8.1.2 正弦载波的幅度调制8.2 正弦AM的解调8.2.1 同步解调8.2.2 异步解调8.3 频分多路复用8.4 单边带正弦幅度调制8.5 用脉冲串作载波的幅度调制8.5.1 脉冲串载波调制8.5.2 时分多路复用8.6 脉冲幅度调制8.6.1 脉冲幅度已调信号8.6.2 在PAM系统中的码间干扰8.6.3 数字脉冲幅度和脉冲编码调制8.7 正弦频率调制8.7.1 窄带频率调制8.7.2 宽带频率调制8.7.3 周期方波调制信号8.8 离散时间调制8.8.1 离散时间正弦幅度调制8.8.2 离散时间调制转换8.9 小结习题第9章拉普拉斯变换9.0 引言9.1 拉普拉斯变换9.3 拉普拉斯反变换9.4 由零极点图对傅里叶变换进行几何求值9.4.1 一阶系统9.4.2 二阶系统9.4.3 全通系统9.5 拉普拉斯变换的性质9.5.1 线性9.5.2 时移性质9.5.3 S域平移9.5.4 时域尺度变换9.5.5 共轭9.5.6 卷积性质9.5.7 时域微分9.5.8 S域微分9.5.9 时域积分9.5.10 初值与终值定理9.5.11 性质列表9.6 常用拉普拉斯变换对9.7 用拉普拉斯变换分析和表征LTI系统9.7.1 因果性9.7.2 稳定性9.7.3 由线性常系数微分方程表征的LTI系统9.7.4 系统特性与系统函数的关系举例9.7.5 巴特沃兹滤波器9.8 系统函数的代数属性与方框图表示9.8.1 LTI系统互联的系统函数9.8.2 由微分方程和有理系统函数描述的因果LTI系统的方框图表示9.9单边拉普拉斯变换9.9.1 单边拉普拉斯变换举例9.9.3 利用单边拉普拉斯变换求解微分方程9.10 小结习题第10章Z变换10.0 引言10.1 Z变换10.2 Z变换的收敛域10.3 Z反变换10.4 由零极点图对傅里叶变换进行几何求值10.4.1 一阶系统10.4.2 二阶系统10.5 Z变换的性质10.5.1 线性10.5.2 时移性质10.5.3 Z域尺度变换10.5.4 时间反转10.5.5 时间扩展10.5.6 共轭10.5.7 卷积性质10.5.8 Z域微分10.5.9 初值定理10.5.10 性质小结10.6 几个常用Z变换对10.7 利用Z变换分析与表征LTI系统10.7.1 因果性10.7.2 稳定性10.7.3 由线性常系数差分方程表征的LTI系统10.7.4 系统特性与系统函数的关系举例10.8 系统函数的代数属性与方框图表示10.8.1 LTI系统互联的系统函数10.8.2 由差分方程和有理系统函数描述的因果LTI系统的方框图表示10.9 单边Z变换10.9.1 单边Z变换和单边Z反变换举例10.9.2 单边Z变换性质10.9.3 利用单边Z变换求解差分方程10.10 小结习题第11章线性反馈系统11.0 引言11.1 线性反馈系统11.2 反馈的某些应用及结果11.2.1 逆系统设计11.2.2 非理想组件的补偿11.2.3 不稳定系统的稳定11.2.4 采样数据反馈系统11.2.5 跟踪系统11.2.6 反馈引起的不稳定11.3 线性反馈系统的根轨迹分析法11.3.1 一个例子11.3.2 死循环极点方程11.3.3 根轨迹的端点:K=0和|K|=+∞时的死循环极点11.3.4 角判据11.3.5 根轨迹的性质11.4 奈奎斯特稳定性判据11.4.1 围线性质11.4.2 连续时间LTI反馈系统的奈奎斯特判据11.4.3 离散时间LTI反馈系统的奈奎斯特判据11.5 增益和相位裕度11.6 小结。
信号与系统奥本海姆原版PPT第六章
6 Time and frequency characterization of S&S
6 Time and frequency characterization of S&S
6 Time and frequency characterization of S&S
Problems: 6.5
6.23
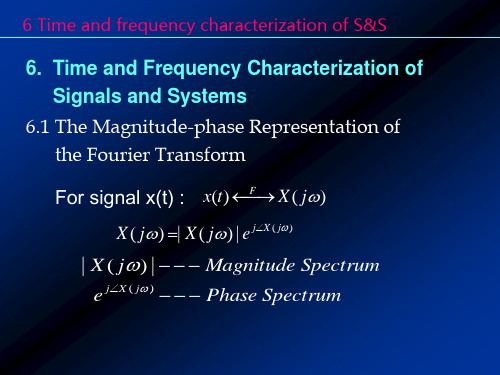
F x(t ) X ( j )
X ( j ) | X ( j ) | e jX ( j )
| X ( j ) | Magnitude Spectrum e jX ( j ) Phase Spectrum
6 Time aБайду номын сангаасd frequency characterization of S&S
6 Time and frequency characterization of S&S
6 Time and frequency characterization of S&S
6.3 Time-Domain Properties of Ideal Frequencyselective Filters Lowpass filter: (1) Continous time:
6 Time and frequency characterization of S&S
6. Time and Frequency Characterization of Signals and Systems 6.1 The Magnitude-phase Representation of the Fourier Transform For signal x(t) :
6 Time and frequency characterization of S&S
信号与系统奥本海姆英文版课后答案chapter6
6.12. Using the Bode magnitude plot, specified in Figure P6.12(a). we may obtain an expression For H1 (j ω ). The figure shows that H1 (j ω ) has the break frequencies ω1 =1, ω2 =8,And
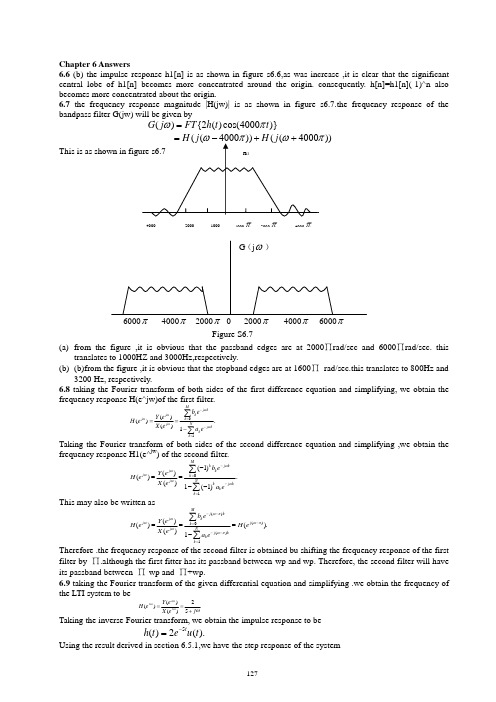
G ( jω ) = FT {2h(t ) cos(4000π t )} = H ( j (ω − 4000π )) + H ( j (ω + 4000π ))
H(j
This is as shown in figure s6.7
-4000
-2000
-1000
1000
π
2000
π
4000
π
G (j ω )
ω3 =40. The frequency response rises as 20dB/decade after ω1 . At ω2 ,this rise is canceled by a -20 dB/decade contribution. Finally, at ω3 ,an additional -20 dB/decade. Contribution results in the
k =0 N k k =1
M
− j (ω −π ) k
1 − ∑ ak e
= H (e j (ω −π ) ).
信号与系统分析(第2版)第6章_5-7
6.1 引言
6.2 离散时间傅里叶变换
6.3 离散时间系统的频域分析
6.4 离散傅里叶变换 6.5 信号频谱的数值计算 6.6 离散傅里叶变换的性质 6.7 快速傅里叶变换简介
信号与系统分析(第2版)电子教案
1
6.5 信号频谱的数值计算
6.5 信号频谱的数值计算
O
t
O
R( )
r (t )
1
O
t
O
只 要 对 带 限 信 号 进 行 DFT 计算,就必须先截断 xt ,这样 一来,频谱泄露就无法避免。
x1 (t )
X 1 ( )
O
t
O
所以时域混叠与频谱泄露是一对矛盾。
信号与系统分析(第2版)电子教案
15
6.5 信号频谱的数值计算
3. 数据截断问题
信号与系统分析(第2版)电子教案
12
6.5 信号频谱的数值计算
3. 数据截断问题
(1) 时限信号抽样及频谱的混叠现象 ① 计算机只能处理时限信号,对非时限信号应先 截短; ② 时限信号的频带无限,抽样定理 s M无法实 现,所以频率混叠不可避免。 ③ 减少混频的措施: a、 s 应尽量取大,这需要大储存空间和快速计 算设备; b、先经过低通滤波器,滤掉信号中大于 M 的频 率分量。
2 j kn e 16 j4 2 k 16
DFT: X [k ]
n 0
3
1 e
2 j k 1 e 16
j k 1 e 2 j k 1 e 8
O
5
10
15
n
奥本海姆-信号与系统-第6章
即z
lim k f (k )
k
Rx 2
可见左边序列的收敛域是半径为 R x 2的圆内部分。 6、双边序列的收敛域
F ( z)
k 1
z平面
f (k ) z k f (k ) z k f (k ) z k
k k 0
故只有 Rx1 Rx 2 时,两个收敛域才有 重叠,z变换存在收敛域为 Rx1 z Rx 2
z a (k ) za
k
z a
z a
第6章 离散系统的Z域分析
6.2
1、线性性质
if
Z变换性质
f 2 (k ) F2 ( z)
式中a,b为任意常 数。叠加后新的 z变换的收敛域至 少是原两个z变换 收敛域重叠部分
f1 (k ) F1 ( z )
then af1 (k ) bf2 (k ) aF 1 ( z ) bF 2 ( z)
z e j 1
z e j 1
a
z 1
第6章 离散系统的Z域分析
2、移位特性
(1)双边z变换 若f (k )是双边序列,其双边z变换为 f (k ) F ( z )
F[ f (k )]
k
f (k ) z k
f (1 n) z1n f (n) z n f (1 n) z 1n
z n ( ) a n 1
k
f (k )z k a z
k k
1
k
n k
n
n n a z
1
z 1即 z a,有 a z Z[ak (k 1)] a z z za 1 a z k 收敛域 即 a ( k 1) za
《奥本海姆 信号与系统 第2版 笔记和课后习题 含考研真题 》读书笔记思维导图

《奥本海姆 信号与系统 第2版 笔 记和课后习题 含考研真题 》
PPT书籍导读
读书笔记模板
最
新
版
本
本书关键字分析思维导图
系统
精华
复习
第版
考生
名校
教材
真题
信号
习题 奥本海姆
傅里叶
笔记
内容
考研
知识
答案
电子书
命题
目录
01 第1章 信号与系统
02
第2章 线性时不变系 统
03
第3章 周期信号的傅 里叶级数表示
04
第4章 连续时间傅里 叶变换
05
第5章 离散时间傅里 叶变换
06 第6章 信号与系统的 时域和频域特性
本书特别适用于参加研究生入学考试指定考研参考书目为奥本海姆《信号与系统》(第2版)的考生。也可 供各大院校学习奥本海姆《信号与系统》(第2版)的师生参考。本书是奥本海姆主编的《信号与系统》(第2版) 的配套电子书,主要包括以下内容:(1)梳理知识脉络,浓缩学科精华。本书每章的复习笔记均对该章的重难点 进行了整理,并参考了国内名校名师讲授该教材的课堂笔记。因此,本书的内容几乎浓缩了该教材的所有知识精 华。(2)详解课后习题,巩固重点难点。本书参考大量相关辅导资料,对奥本海姆主编的《信号与系统》(第2 版)的课后习题进行了详细的分析和解答,并对相关重要知识点进行了延伸和归纳。(3)精编考研真题,培养解 题思路。本书从历年考研真题中挑选最具代表性的部分,并对之做了详尽的解析。所选考研真题涵盖了每章的考 点和难点,考生可以据此了解考研真题的命题风格和难易程度,并检验自己的复习效果。(4)免费更新内容,获 取最新信息。本书定期会进行修订完善,补充最新的考研真题和答案。对于最新补充的考研真题和答案,均可以 免费升级获得。
奥本海姆《信号与系统》(第2版)知识点归纳考研复习(下册)

第7章采样第8章通信系统第9章拉普拉斯变换第10章Z变换第11章线性反馈系统第7章采样7.2连续时间信号x(t)从一个截止频率为的理想低通滤波器的输出得到,如果对x(t)完成冲激串采样,那么下列采样周期中的哪一些可能保证x(t)在利用一个合适的低通滤波器后能从它的样本中得到恢复?7.3在采样定理中,采样频率必须要超过的那个频率称为奈奎斯特率。
试确定下列各信号的奈奎斯特率:7.4设x(t)是一个奈奎斯特率为ω0的信号,试确定下列各信号的奈奎斯特率:7.5设x(t)是一个奈奎斯特率为ω0的信号,同时设其中。
7.6在如图7-1所示系统中,有两个时间函数x1(t)和x2(t)相乘,其乘积W (t)由一冲激串采样,x1(t)带限于ω17.7信号x(t)用采样周期T经过一个零阶保持的处理产生一个信号x0(t),设x1(t)是在x(t)的样本上经过一阶保持处理的结果,即7.8有一实值且为奇函数的周期信号x(t),它的傅里叶级数表示为7.9考虑信号x(t)为7.10判断下面每一种说法是否正确。
7.11设是一连续时间信号,它的傅里叶变换具有如下特点:7.12有一离散时间信号其傅里叶变换具有如下性质:7.13参照如图7-7所示的滤波方法,假定所用的采样周期为T,输入xc(t)为带限,而有7.14假定在上题中有重做习题7.13。
7.15对进行脉冲串采样,得到若7.16关于及其傅里叶变换7.17考虑理想离散时间带阻滤波器,其单位脉冲响应为频率响应在条件下为7.18假设截止频率为π/2的一个理想离散时间低通滤波器的单位脉冲响应是用于内插的,以得到一个2倍的增采样序列,求对应于这个增采样单位脉冲响应的频率响应。
7.19考虑如图7-11所示的系统,输入为x[n],输出为y[n]。
零值插入系统在每一序列x[n]值之间插入两个零值点,抽取系统定义为其中W[n]是抽取系统的输入序列。
若输入x[n]为试确定下列ω1值时的输出y[n]:7.20有两个离散时间系统S1和S2用于实现一个截止频率为π/4的理想低通滤波器。
信号与系统_第二版_奥本海默 _课后答案[1-10章]
![信号与系统_第二版_奥本海默 _课后答案[1-10章]](https://img.taocdn.com/s3/m/6ff45c8f83c4bb4cf6ecd112.png)
学霸助手[]-课后答案|期末试卷|复习提纲
学霸h助us手 Contents baz Chapter 1 ······················································· 2 xue Chapter 2 ······················································· 17
e 5 = 5 j0 ,
e -2 = 2 ,jp
e -3 j = 3
-
j
p 2
e 1
2
-
j
3 2
=
, -
j
p 2
e 1+ j =
2
, j
p 4
( ) 1- j e 2 =2
-
j
p 2
ep
j(1- j) = 4 ,
e 1+
1-
j j
=
p 4
e 2 + j 2 = -1p2
1+ j 3
ò e 1.3.
(a)
xue学ba霸zh助usS手hoiug.ncoaml(Sseco&nd EdSitioyn)stems
—Learning Instructions
xu(eEbxe学arzc霸hisue助sshA手onus.wceorms)
Department
of
Computer 2005.12
Enginexeurein学bga霸zh助us手
=¥
E¥
0
-4tdt
=
1 4
,
P ¥ =0, because
E¥ < ¥
手 om ò (b)
x e , 2(t) = j(2t+p4 )
信号与系统课件第六章(电子)
k 0 序列f(k)的双边z变换为:
F ( z )
f
k
(k)zk
z2
2z
3
2 z
1 z2
其单边z变换为: F ( z )
k0
f
(k)zk
3
2 z
1 z2
可见:*单边与双边z变换不同;
*对双边z变换,除z=0,和∞外对任意z,
F(z)有界,故其收敛域0<|z|<∞;
*对单边z变换,其收敛域|z|>0。
第六章 离散系统的z域分析
第三章中我们讨论了离散时间系统的时域分析法,重点 介绍了差分方程的时域求解方法。在连续时间系统中,为 避免求解微分方程的困难,可以通过拉氏变换把微分方程 转换为复频域的代数方程。基于同样的理由,在离散时间 系统中,为了避开求解差分方程的困难,也可以通过一种称 为z变换的方法,把差分方程转换为z域的代数方程。
因此,z变换在离散系统分析中的地位和拉氏变换在连续 系统分析中的地位是相似的。
z变换可以直接从数学角度进行定义;也可以利用拉普 拉斯变换引出。
本章主要内容 6.1 z变换 6.2 z变换的性质 6.3 逆z变换 6.4 z域分析
§6.1 z变换
一、从拉普拉斯变换到z变换 二、z变换 三、收敛域
一、从拉普拉斯变换到z变换
(3)对于双边z变换必须 标明收敛域,否则其对应序 列将不是唯一的。
|b|
|a|
0
Re[z]
双边序列的收敛域
ak (k) z z a
za
bk (k 1) z z b
zb
bk (k 1) z z b
zb
若已知 Fz,则 其原函数不唯一.如:
Fz z
z2
f k 2k k 或 f k 2k k 1
信号与系统课件(奥本海姆+第二版)+中文课件

●离散周期信号可表示为: x[n]=x[n+mN] , m=0,1,2,3,……
其中:N为正整数。 把能使上式成立的最小正整数N,称为x[n]的基波周期 N 0 。
x [n]
N0
-4
-1
2
5
-5 -3 -2 0 1 3 4 6
2)、不满足上述关系的信号则称为非周期信号。
nN0 = 3
3、奇信号与偶信号
1、若 0< a <1,则x(at)是将x(t)在时间轴线性展宽a倍。(使变化减慢)
例如:若取a=1/2,则得x(t/2) 。此时原函数x(t)中t=1 时的值,等于在 x(t/2)中 t =2的值,即x(2*1/2)= x (1)。如图(b)所示;
2、若 a >1 , 则x(at)是将x(t)在时间轴线性压缩a倍。(使变化加速)
∫t2
2
E∞
=
lim
T →∞
t1
x (t )
dt
∫ ,
P∞
= lim 1 T→∞ T
t2
2
x(t) dt
t1
1)、能量信号
信号的能量E满足: 0< E∞ <∞
,而
P∞
= lim E∞ T →∞ 2T
=0
2 )、功率信号
信号的平均功率P满足:0 < P∞ < ∞ ,而 E∞ = ∞
例1:已知信号为 x[n] = e jω0n,试问是能量信号还是功率信号。
一、时移(信号的平移)——即信号的波形沿x轴左右平行移动,但波的形状 不变。
1、设连续信号x(t)的波形如图(a)所示,今将x(t)沿t轴平移 t 0 ,即得到平移
信号x(t-
信号与系统奥本海姆课件第6章
| H ( j ) |
Magnitude of Frequency Response : Gain 增益/幅频特性 调整输入信号各频率分量的相对强度(幅度)关系 幅频特性
Phase of Frequency Response : Phase shift 相移/相频特性 相频特性 调整输入信号各频率分量的相对位置(相位)关系
F
| X ( j ) | e
j X ( j )
e jt
| H ( j ) | e j
H ( j )
jt F 1 e
| Y ( j ) | e j
Y ( j )
X ( j )
H ( j )
Y ( j )
被滤除
各频率成份 | X ( j) | 各频率成份
| H ( j) |
F 1
t
x (t ) changing faster
higher frequency
t
7
C. Effect of Phase:
相位对信号的影响
1 2 x(t ) 1 cos(2 t 1 ) cos(4 t 2 ) cos(6 t 3 ) 2 3
引起信号在时间上的平移。若连续时间 LTI系统:
H ( j ) e
jt0
则 y(t ) x(t t0 )
此时并未丢失信号所携带的任何信息,只是发生 时间上的延迟,因而在工程应用中是允许的。
17
6.2.1 Linear and Nonlinear Phase
A.
Linear Phase :linear function of 线性相位: 的线性函数
6.2.3. log-magnitude and phase plots 对数模与Bode图
信号与系统第二版课后习题解答(6-7-9)奥本海姆

Chap 66.1 Consider a continuous-time LTI system with frequency response()()|()|H j H j H j e ωωω=and real impulse response h(t). Suppose that we apply an input 00()cos()x t t ωφ=+ to this system .The resulting output can be shown to be of the form0()()y t Ax t t =-Where A is a nonnegative real number representing anamplitude-scaling factor and 0t is a time delay.(a)Express A in terms of |()|H j ω.(b)Express 0t in terms of0()H j ω Solution:(a) For 0()()y t Ax t t =-So 0()()jt Y j AX j eωωω-= 0()()()j t Y j H j Ae X j ωωωω-== So |()|A H j ω=(b) for 0()H j t ωω=- So 0()H j t ωω=-6.3 Consider the following frequency response for a causal and stable LTI system:1()1j H j j ωωω-=+ (a) Show that |()|H j A ω=,and determine the values of A. (b)Determine which of the following statements is true about ()τω,the group delay of the system.(Note()(())/d H j d τωωω=-,where ()H j ωis expressed in aform that does not contain any discontinuities.)1.()0 0for τωω=>2.()0 0for τωω>>3 ()0 0for τωω<>Solution:(a) for |()|1H j ω== So A=1(b) for )(2)()()1()1()(ωωωωωωarctg arctg arctg j j j H -=--=+∠--∠=∠ 212)()(ωωωωτ+=∠-=d j H d So ()0 0for τωω>>6.5 Consider a continuous-time ideal bandpass filter whose frequency response is⎩⎨⎧≤≤=elsewherej H c c,03||,1)(ωωωω (a) If h(t) is the impulse response of this filter, determine a functiong(t) such that)(sin )(t g t t t h c πω=(b) As c ω is increased, dose the impulse response of the filter get more concentrated or less concentrated about the origin?Solution(a) Method 1. Let1()()()()()()2h t x t g t H j X j G j ωωωπ=↔=* They are shown in the figures,where1,sin ()(){0,c c ctx t X j t ωωωωωωπ<=↔=> So we can get()2cos(2)()2[(2)(2)]c c c g t t G j ωωπδωωδωω=↔=-++Method 2. Using the inverse FT definition,it is obtained331(){}2c c c cj t j t h t e d e d ωωωωωωωωπ--=+⎰⎰ 11{sin 3sin }{sin }{2cos 2}c c c c t t t t t tωωωωππ=-= (b) more concentrated.Chap 77.1 A real-valued signal x(t) is know to be uniquely determined by its samples when the sampling frequency is10,000s ωπ=.For what values ofω is ()X j ω guaranteed to be zero? Solution:According to the sampling theorem 2s M w w > That is 110000500022M s w w ππ<== So if 5000M w w π>=,0)(=jw X7.2 A continuous-time signal x(t) is obtained at the output of an ideal lowpass filter with cutoff frequency 1,000c ωπ=.If impulse-train sampling is performed on x(t), which of the following sampling periods would guarantee that x(t) can be recovered from its sampled version using an appropriate lowpass filter?(a) 30.510T -=⨯(b) 3210T -=⨯(c) 410T -= Solution: π1000==c M w wFrom the sampling theorem,∴π20002=>M s w w ,that is 3102000222-==<πππM s w T ∴the conditions (a) and (c) are satisfied with the sampling theorem,(b) is not satisfied.7.3 The frequency which, under the sampling theorem, must be exceeded by the sampling frequency is called the Nyquist rate. Determine the Nyquist rate corresponding to each of the following signals:(a)()1cos(2,000)sin(4,000)x t t t ππ=++ (b)sin(4,000)()t x t tππ=(c) 2sin(4,000)()()t x t t ππ= Solution: (a) )4000sin()2000cos(1)(t t t x ππ++=max(0,2000,4000)4000M w πππ==∴ the Nyquist rate is 28000s M w w π>= (b) sin(4000)()t x t tππ= 4000M w π=∴ the Nyquist rate is 28000s M w w π>= (c) 2sin(4000)()t x t t ππ⎛⎫= ⎪⎝⎭ 2sin(4000)()t x tt ππ⎛⎫= ⎪⎝⎭221(1cos(8000))2t t ππ=- ∴8000M w π=∴the Nyquist rate is 216000s M w w π>=7.4 Let x(t) be a signal with Nyquist rate 0ω. Determine the Nyquist rate for each of the following signals:(a)()(1)x t x t +- (b)()dx t dt(c)2()x t(d)0()cos x t t ωSolution:(a) we let 1()()(1)y t x t x t =+-So 1()()()(1)()j j Y j X j e X j e X j ωωωωωω--=+=+ So the Nyquist rate of signal (a) is 0ω.(b) we let 2()()dx t y t dt= So 2()()Y j j X j ωωω=So the Nyquist rate of signal (b) is0ω. (c) we let 23()()y t x t = So 31()()*()2Y j X j X j ωωωπ= So the Nyquist rate of signal (c) is 20ω.(d) we let 40()()cos y t x t t ω=For 000cos [()()]FT t ωπδωωδωω→-++ So 4001()((()(())2Y j X j X j ωωωωω=-++ So the Nyquist rate of signal (d) is 03ω7.9 Consider the signal 2sin 50()()t x t tππ= Which we wish to sample with a sampling frequency of 150s ωπ= to obtain a signal g(t) with Fourier transform ()G j ω.Determine the maximum value of 0ω for which it is guaranteed that0()75() ||G j X j for ωωωω=≤Where ()X j ω is the Fourier transform of x(t).Solution: 2sin(50)()t x t t ππ⎛⎫= ⎪⎝⎭))100cos(1(2122t t ππ-= ∴100M w π=But π150=s wthe figure about before-sampling and after-sampling of )(jw H isWe can see that only when π500≤w , the before-sampling and after-sampling of )(jw H have the same figure.So if 0..)..(75)(w w for jw X jw G ≤=The maximum value of 0w is π50.Chap 99.2 Consider the signal 5()(1)t x t e u t -=- and denote its Laplace transform by X(s).(a)Using eq.(9.3),evaluate X(s) and specify its region of convergence. (b)Determine the values of the finite numbers A and 0t such that the Laplace transform G(s) of 50()()t g t Ae u t t -=-- has the same algebraic form as X(s).what is the region of convergencecorresponding to G(s)?Solution:(a). According to eq.(9.3), we will getdt e t x s X st -∞∞-⎰=)()(dt e t u e st t --∞∞--=⎰)1(5dt e t s )5(1+-∞⎰=)5()5()5()5()5(1)5(+=+--=+-=+-+-∞+-s e s e s e s s t s ROC:Re{s}>-5 (b). )()(05t t u Ae t g t --=-−→←LT 0)5(5)(t s e s A s G ++-=, Re{s}<-5 ∴ If )()(s X s G =then it ’s obviously that A=-1, 10-=t , Re{s}<-5.9.5 For each of the following algebraic expressions for the Laplace transform of a signal, determine the number of zeros located in the finite s-plane and the number of zeros located at infinity: (a)1113s s +++ (b) 211s s +- (c) 3211s s s -++ Solution :(a).1, 1)3)(1(423111+++=+++s s s s s ∴ it has a zero in the finite s-plane, that is 2-=sAnd because the order of the denominator exceeds the order of the numerator by 1∴ X(s) has 1 zero at infinity.(b). 0, 111)1)(1(1112-=-++=-+s s s s s s ∴ it has no zero in the finite s-plane.And because the order of the denominator exceeds the order of the numerator by 1∴ X(s) has 1 zero at infinity.(c). 1, 011)1)(1(112223-=++++-=++-s s s s s s s s s ∴ it has a zero in the finite s-plane, that is 1=sAnd because the order of the denominator equals to the order of the numerator∴ X(s) has no zero at infinity.9.7 How many signals have a Laplace transform that may be expressed as 2(1)(2)(3)(1)s s s s s -++++ in its region of convergence?Solution:There are 4 poles in the expression, but only 3 of them have different real part.∴ The s-plane will be divided into 4 strips which parallel to the jw-axis and have no cut-across.∴ There are 4 signals having the same Laplace transform expression.9.8 Let x(t) be a signal that has a rational Laplace transform with exactly two poles located at s=-1 and s=-3. If2()() ()t g t e x t and G j ω=[ the Fourier transform of g(t)]converges, determine whether x(t) is left sided, right sided, or two sided.Solution:)()(2t x e t g t =∴)2()(-=s X s G ROC: R(x)+Re{2}And x(t) have three possible ROC strips:),1(),1,3(),3,(+∞-----∞∴g(t) have three possible ROC strips: ),1(),1,1(),1,(+∞---∞ IF jw s s G jw G ==|)()(Then the ROC of )(s G is (-1,1)∴)(t x is two sides. 9.9 Given that1(),{}Re{}sat e u t Re s a s a -↔>-+ Determine the inverse Laplace transform of22(2)(),Re{}3712s X s s s s +=>-++ Solution: It is obtained from the partial-fractional expansion:22(2)2(2)42()712(4)(3)43s s X s s s s s s s ++-===+++++++,Re{}3s >-We can get the inverse Laplace transform from given formula and linear property.43()4()2()t t x t e u t e u t --=-9.10 Using geometric evaluation of the magnitude of the Fourier transform from the corresponding pole-zero plot ,determine, for each of the following Laplace transforms, whether the magnitude of the corresponding Fourier transform is approximately lowpass, highpass, or bandpass. (a): 1}Re{,.........)3)(1(1)(1->++=s s s s H (b): 221(),{}12s H s e s s s =ℜ>-++(c): 232(),{}121s H s e s s s =ℜ>-++ Solution:(a). 1}Re{,.........)3)(1(1)(1->++=s s s s H It ’s lowpass.(b).21}Re{,.........1)(22->++=s s s s s H It ’s bandpass.(c). 1}Re{., (1)2)(223->++=s s s s s H It ’s highpass.9.13 Let ()()()g t x t x t α=+- ,Where ()()t x t e u t β-=. Andthe Laplace transform of g(t) is 2(),1{}11s G s e s s =-<ℜ<-. Determine the values of the constantsαand βSolution: ()()()g t x t x t α=+-,and ()()t x t e u t β-=The Laplace transform : ()()()G s X s X s α=+- and()1X s s β=+,Re{}1s >- From the scale property of Laplace transform, ()1X s s β-=-+,Re{}1s < So 2(1)(1)()()()111s G s X s X s s s s βαββαβαα--+=+-=+=+-+-,1Re{}1s -<< From given 2()1s G s s =-,1Re{}1s -<< We can determine : 11,2αβ=-=。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
❖ 本章的基本内容旨在建立对系统的时域和频域 特性进行综合分析的思想和方法。
6.1 傅里叶变换的模和相位表示
无论CTFT还是DTFT,一般情况下都表现为 一个复函数。
• 这说明:一个信号所携带的全部信息分别包含 在其频谱的模和相位中。
•1.频率成形滤波器 •2.频率选择性滤波器
二. 理想频率选择性滤波器的频率特性
• 理想频率选择性滤波器的频率特性在某一个(或几 个)频段内,频率响应为常数,而在其它频段内频率 响应等于零。
•理想滤波器可分为低通、高通、带通、带阻。
• 滤波器允许信号完全通过的频段称为滤波器的 通带(pass band ),完全不允许信号通过的频 段称为阻带(stop band)。
信号与系统奥本海默第二版 第6章
•本章主要内容
•1. 傅立叶变换的模与相位。 •2. LTI系统的幅频特性与相频特性,系统的失真。 •3. 系统的不失真传输条件。 •4. 理想滤波器的时域和频域特性。 •5. 非理想滤波器的特性及逼近方式。 •6. 一阶与二阶系统的分析方法,Bode图。
6.0 引言 Introduction
的代价也越来越大。
•5阶Butterworth滤波器与5阶Cauer滤波器的比较:
•单位阶跃响应:
6.5 一阶与二阶连续时间系统
•对由LCCDE描述的连续时间LTI系统,其频率 响应为:
•其中: 、 均为实常数。
• 此时,可通过对 、 因式分解,将其表 示成若干个一阶或二阶有理函数的连乘;或者通 过部分分式展开,表示成若干个一阶或二阶有理 函数相加。
• 时:随 的减小,逐步过渡为带通特性。
• 时:系统具有最平坦的低通特性。
•相位特性:
•时 : •时 :•时 •可将其用: 折线近似为:
•据此可作出不同 下的相位特性
•可见 越小,相位的非线性越严重。
•三.有理型频率响应的Bode 图•对:于
• 这种频率特性的因子,与一阶、二阶系统的情 况相比,其 存在倒量关系。即:
•因此,导致信号失真的原因有两种: 1.幅度失真:由于频谱的模改变而引起的失真。 • 2.相位失真:由于频谱的相位改变引起的失真。
• 在工程实际中,不同的应用场合,对幅度失 真和相位失真有不同的敏感程度,也会有不同 的技术指标要求。
6.2 LTI系统频率响应的模和相位表示
LTI系统对输入信号所起的作用包括两个方面: 1. 改变输入信号各频率分量的幅度; 2. 改变输入信号各频率分量的相对相位。
一. 线性与非线性相位
• 信号在传输过程中,相位特性或幅度特性发生
•改变都会引起信号波形的改变,即发生失真。
• 当相位特性仅仅是附加一个线性相移时,则只
引起信号在时间上的平移。若连续时间LTI系统
:
•则
•此时并未丢失信号所携带的任何信息,只是发生 时间上的延迟,因而在工程应用中是允许的。
• 如果系统的相位特性是非线性的,由于不同频率 分量受相位特性影响所产生的时移不同,叠加起来一 定会变成一个与原来信号很不相同的信号波形。
• 对离散时间系统,由于其有效频率范围只有 , •而且,即使在对数坐标下也不存在直线型的渐近 线。因而不采用对数坐标,只采用对数模。 • 采用对数模(或Bode图)表示频率特性,对于 幅频特性有零点或在某些频段上为零的系统,是 不适用的。
6.3 理想频率选择性滤波器
一. 滤波
通过系统改变信号中各频率分量的相对大小和 相位,甚至完全去除某些频率分量的过程称为滤波 。 •滤波器可分为两大类:
•考察由弹簧、阻尼器、质量M组成的减震系统 •(位移) •(牵引力)
•分析受力
•可列出方程
•即
•其中
•显然,若
•则方程就成为标准形式。
•由二阶系统的方程可得系统的频率响应:
•1.时域特性: •由
•当 时,
•系统处于临界阻尼状态。
• 当 时, 、 为共轭复根,系统处于欠 阻尼状态.
•
时, 、 为实数根,系统为过阻尼状态.
•时,
系统处于无阻尼状态。
•时,二阶系统的时域特性最佳
•2.频率特性:
•当 时: •当 时:
• 在对数坐标中可用两条直线表示。一条是低频
•段的0dB线,一条是高频段的斜率为-40dB/dec
•的直线。
•时,准确的对数模为:
•
时,幅频特性在
处出现峰值,其值为
。
• 时:系统类似于一阶系统具有低通特性。
• 对同一种滤波器,阶数越高,对理想特性逼近得 越好,过渡带越窄,但付出的代价是系统越复杂。
• 对同样阶数的滤波器,从 Butterworth
Chebyshev
Cauer,其幅频特性逼近得越来
越好,但阶跃响应的起伏、超量和振荡也越厉害(
体现了系统频域特性与时域特性的不兼容)。系统
的复杂程度也越来越高,相应地,实现系统所付出
•二. FIR滤波器 •离散时间滤波器可以分为IIR和FIR两大类。 •考察如下的动平均滤波器:
•它是一个FIR系统,其频率响应为: •更一般的情况,可加权的动平均滤波器可表示为: •选择不同的加权序列 ,即可改变滤波器的特性。
•加权动平均滤波器的窗函数序列:
•该FIR滤波器的幅频特性(对数模):
对非线性相位系统,定义群时延为
•群时延:代表了在以 为中心的一个很小的频带或 很少的一组频率上信号所受到的有效公共延时。 • 考察一个中心频率为 的窄带输入信号,一 个非线性相位的系统在此窄带范围内,可将其相 位的变化近似看成线性的。因此,
•该系统对窄带输入信号的近似效果就是:
•1. 由
引起的幅度成形;
•2. 对应系统在 的恒定相位 的因子 的影响;
•3. 对应系统在窄带内的近似线性相位 所产生
的时延 。该时延就是系统在
的群时延。
•四. 对数模与Bode图
• 在工程应用中,往往采用对数模特性(或称为Bode 图)来描述系统的频率特性。在对数坐标下,采用对 数模,可以给频率特性的表示带来方便。这是因为:
•这就要求系统的频率特性为
•全通系统:系统的幅频特性是一个常数。
• 据此可得出信号传输的不失真条件: •——时域表征 •——频域表征
•
•0
•
•0
• 通常,系统若在被传输信号的带宽范围内满足不 失真条件,则认为该系统对此信号是不失真系统。
三. 群时延 Group Delay
对线性相位系统,系统的相位特性表明了信号 的各个频率分量在通过系统时,系统对它所产生的 附加相移。相位特性的斜率就是该频率分量在时域 产生的时延。
• 这表明:由LCCDE描述的LTI系统可以看成 由若干个一阶或二阶系统通过级联或并联构成。 因此,一阶和二阶系统是构成任何系统的基本单 元。掌握一阶和二阶系统的分析方法就尤为重要 。
一.一阶系统:
•模型:
•1.时域特性:
•可以看出: 越小, 上升得越快,系统失真越小。
•2. 一阶系统的Bode图:
•在以前的讨论中,已经看到 ➢ 在时域,系统的特性由 或 描述;
➢ 在频域,系统的特性由 或 描述 ; • 工程中设计系统时,往往会对系统的特性从 时域角度或频域角度提出某些要求。
❖ 在LTI 系统分析中,由于时域中ቤተ መጻሕፍቲ ባይዱ微分(差分 )方程和卷积运算在频域都变成了代数运算, 所以利用频域分析往往特别方便。
6.6 一阶与二阶离散时间系统
•一.一阶系统
•系统的数学模型:
•由差分方程可得系统的频率响应:
•1. 时域特性 •对频率响应做傅立叶反变换可得:
•系统的单位阶跃响应为:
• 据此可做出不同参数情况下系统的单位脉 冲响应和单位阶跃响应:
•2. 频域特性 •由系统的频率响应可以得出:
• 据此可做出不同参数情况下一阶系统的幅 频特性和相频特性:
•底盘质 量
•M
•弹 簧
•减震器
•路面
•参考高度
• 从频域看, 越小,越有利于滤除路面不平所 造成的影响。但 越小,时域特性变化越慢。
• 从时域角度看,希望响应时间尽可能快,并且不 要出现震荡和超量,因此应该要求 ,但 时, 系统的频率特性并不是最佳。
• 对系统的时域特性和频域特性综合折中考虑, 是工程应用中很重要的问题。
连续时间理想频率选择性滤波器的频率特性
•低通
•高
通
•带
•带
通
阻
•离散时间理想频率选择性滤波器的频率特性
•-
• •2
•低通
•-
•
•高通
•-
•0
•
•带通
•-
•
•带阻
• 各种滤波器的特性都可以从理想低通特性而来。 •离散时间理想滤波器的特性在 区间上,与相 应的连续时间滤波器特性完全相似。
三.理想滤波器的时域特性
• 1.可以将模特性的相乘关系变为相加关系; • 2.可以利用对数坐标的非线性,展示更宽范围的 频率特性,并使低频端更详细而高频端相对粗略; • 3.对连续时间系统,可以方便地建立模特性和相 位特性的直线型渐近线。
•工程中广泛应用的有两种对数模: •单位奈培(Np) •单位分贝(dB) decibel
•3.Cauer滤波器:(椭圆函数滤波器) •通带、阻带均等起伏。 • 它们都是从幅频特性出发逼近理想低通的模特 性的。
•从相位特性出发,逼近理想的线性相位特性有 •1.Bassel滤波器: •群时延最平伏逼近; •2.包络时延Chebyshev滤波器: •包络时延等起伏逼近; •3.Gauss滤波器。
6.4 非理想滤波器
• 由于理想滤波器是物理不可实现的,工程应用 中就必须寻找一个物理可实现的频率特性去逼近 理想特性,这种物理可实现的系统就称为非理想 滤波器。 • 对理想特性逼近得越精确,实现时付出的代价 越大,系统的复杂程度也越高。 • 非理想滤波器的频率特性以容限方式给出。