科尔摩根伺服电机样本DBL-DBK_Servo_Motors_Torque_Curves
科尔摩根伺服报警代码中文

科尔摩根伺服报警代码(中文)————————————————————————————————作者: ————————————————————————————————日期:错误编号名称说明E /P 状态信息通电状态正常... 状态信息放大器是更新启动配置- 状态信息编程模式- S -AS-Enable AS-Enable输入0VF01* 散热片温度散热片温度过高(默认:80°C)F02* 超压供电过压F03* 跟踪误差位置控制器F04 信息反馈线缆坏、短路、接地F05* 欠压供电低压F06 电机温度电机温度过高,或传感器故障F07 内部电压内部供应电压不行F08* 超速度电机速度过高,位置偏移F09 电可擦只读存储器自检错误F10 信号失灵保护信号失灵保护(线缆坏或接触不良)F11 制动器线缆坏、短路、接地F12电机相位电机位置丢失(线缆坏等)F13* 环境温度环境温度过高F14 输出级输出功率错误F15 I²t max.I²t超过最大值F16* 电源BTB/RTO 2或3个阶段没有供电F17 A / D转换器模数转换误差,造成极端的电磁干扰F18重新生成回复电路故障或不正确的设置F19* 直流母线连接直流母线连接故障F20 槽误差槽误差,取决于类型的扩充卡(见ASCII命令参考) F21 操纵错误处理扩充卡错误F22 保留的保留的F23 总线通讯关闭严重的CAN总线通信的错误F24警告显示警告故障F25 变换误差换码误差F26 限位开关硬件限制开关移动误差F27AS操作错误——AS-Enable输入,使已经确定在同一时间F28 现场总线错误现场总线错误(见ASCII命令参考)F29 现场总线错误现场总线通信干扰(见ASCII命令参考)F30 紧急暂停暂停,紧急停车F31 保留保留F32系统错误系统软件没有反应正确警告信息编号名称说明E/P状态信息通电状态正常. . . 状态信息放大器是更新启动配置- S-AS-Enable AS-Enable输入0V- 状态信息编程模式n01 I²t I²t临界值超过n02 回复电压达到预设电压n03* S_故障超过预置下的错误限制n04*响应监测响应监测(现场总线)已经启动n05 供应阶段供电相丢失n06* SW限制开关1通过软件限制开关1n07* SW限制开关2通过软件限制开关2n08 运动任务误差a faulty motiontask was startedn09 没有参考点no reference point(Home) set at start of motion taskn10* PSTOP PSTOP限位开关激活n11* NSTOP NSTOP限位开关激活n12 电机加载默认值只有ENDAT或HIPERFACE,差异电机数字保存在该编码器和放大器、电机负载默认值n13* 扩展卡24 V直流供电为I/O扩充卡不可以n14 SinCos反馈SinCos换向器(激发和运动)没有完成,将被取消当放大器被激活和激发和运震动进行了n15 保留保留n16 总结警告总结了n31到n17警告n17 现场总线的同步CAN同步没有登录n18 multiturn overflow max.超过电的机转数量n19 motion task rampsare limited在运动范围溢出任务数据n20 无效运动任务无效运动任务n21 PLC程序错误详情见可编程序控制器(PLC)的代码n22 max. motor temperaturreachedthe user can shut down theprocessbefore thetemperatureeror will interrupt the processimmediatel yn23SinCos反馈到达警告等级n24 数字I /O配置不合乎逻辑n25-n31保留保留n32 固件版本固件版本是一个n故障错误诠释显示意义可能原因措施/解释HMI(人机界面)消息:通信故障电缆使用错误使用null-modem电缆伺服放大器或PC上电缆插错位置正确的插伺服放大器和PC电缆插头错误的PC接口选择选择正确的界面F01* 散热片温度散热片温度过高调整系统设置温度(80)或降低环境温度放大器过脏检查/吹出通风槽。
科尔摩根(DDR)电机选型指南
7
直接驱动技术
直接驱动技术
传统伺服系统的机械传动一般带有齿轮、齿轮头、皮带/皮带轮或 凸轮,它们连接在电机和负载之间。
如果采用直接驱动技术,则不需要机械传动,电机直接连接到负 载。
为什么要使用直接驱动技术? 提高精度和可重复度 一个“高精度”行星齿轮头的背隙可以达到1弧分。对于绝对稳定驱动电 机,这可能使负载移动1弧分。科尔摩根的标准直接驱动旋转(DDR)伺 服电机的重复误差小于1弧秒。因此,直接驱动电机的位置保持能力比传 统电机/齿轮头好60倍。 直接驱动技术提高了精度以后,可以使机器生产更高质量的产品:
需要一家能够提供多种集成解决方案的全系统供应
D(H)06x
16
商。科尔摩根就采用了全面响应模式,为客户提供全
套解决方案,这些方案将编程软件、工程服务以及同
D(H)08x
20
类最佳的运动部件结合起来。
D(H)10x
24
覆盖全球
D(H)14x
28
我们在北美、欧洲、中东和亚洲拥有众多直销、工程
定制应用
32
显著降低噪音 如果采用机械分度器,噪音很大,两个人需要大声喊叫才能 听见对方。而如果采用有框架DDR,则几乎听不到它操作的 声音。
伺服电机_百度百科

⑸同功率下有较小的体积和重量。
自从德国MANNESMANN的Rexroth公司的Indramat分部在1978年汉诺威贸易博览会上正式推出MAC永磁交流伺服电动机和驱动系统,这标志着此种新一代交流伺服技术已进入实用化阶段。到20世纪80年代中后期,各公司都已有完整的系列产品。整个伺服装置市场都转向了交流系统。早期的模拟系统在诸如零漂、抗干扰、可靠性、精度和柔性等方面存在不足,尚不能完全满足运动控制的要求,近年来随着微处理器、新型数字信号处理器(DSP)的应用,出现了数字控制系统,控制部分可完全由软件进行,分别称为摪胧只瘮或抟旌鲜綌、撊只瘮理 历史 生活 社会 艺术 人物 经济 科学 体育 核心用户 NBA
伺服电机科技名词定义
中文名称:伺服电机 英文名称:servo motor
定义:转子转速受输入信号控制,并能快速反应,在自动控制系统中作执行元件,且具有机电时间常数小、线性度高、始动电压
以生产机床数控装置而著名的日本法那克(Fanuc)公司,在20世纪80年代中期也推出了S系列(13个规格)和L系列(5个规格)的永磁交流伺服电动机。L系列有较小的转动惯量和机械时间常数,适用于要求特别快速响应的位置伺服系统。
日本其他厂商,例如:三菱电动机(HC-KFS、HC-MFS、HC-SFS、HC-RFS和HC-UFS系列)、东芝精机(SM系列)、大隈铁工所(BL系列)、三洋电气(BL系列)、立石电机(S系列)等众多厂商也进入了永磁交流伺服系统的竞争行列。
六个系列。20世纪90年代先后推出了新的D系列和R系列。由旧系列矩形波驱动、8051单片机控制改为正弦波驱动、80C、154CPU和门阵列芯片控制,力矩波动由24%降低到7%,并提高了可靠性。这样,只用了几年时间形成了八个系列(功率范围为0.05~6kW)较完整的体系,满足了工作机械、搬运机构、焊接机械人、装配机器人、电子部件、加工机械、印刷机、高速卷绕机、绕线机等的不同需要。
AKM系列伺服电机
速度
连续运行
间歇运行
定义
Tps - 系统的峰值失速转矩 Tms - 最高速度时的峰值转矩 Tcs - 停止时的连续转矩 Tcr - 连续额定转矩(额定功率下的转矩) ωmax - 最高速度 ωr - 额定速度(额定功率下的速度) ωk - 在峰值包络拐点的速度(系统峰值
转矩和电压极限线的相交处)
驱动装置和电动机性能曲线
AKM 系列电动机目 录
2-3 4 5 6 7
8 - 14 9
10 - 11 12- 14
15 16 - 29 16 - 17 18 - 19 20 - 21 22 - 23 24 - 25 26 - 27 28 - 29 30 - 32
33 34 - 35 36 - 40
3
AKM 电动机系列简介
大量选项
本选择指南概述了该新型先进电动机系列广泛 可用的选项。使用本指南可以从大量电动机解 决方案中做出选择。我们的电动机产品由全系 列数字驱动支持,为您提供市场上可得的最佳 运动控制解决方案。
找不到您要找的东西?除了先进的 Kollmorgen 电动机系列外,科尔摩根还提供许多其它杰出 产品,从直接传动旋转和线性产品到步进电动 机和同步解决方案。科尔摩根甚至可以根据您 的需求设计正确的解决方案。您现在就可以向 我们的客户支持中心询问适合您需求的定制解 决方案。让科尔摩根的专家将大量解决方案带 到您的面前。
Kollmorgen AKM 电动机和驱动装置 –––– 无需妥协的选择
科尔摩根的新型 Kollmorgen AKM 伺服电动机和驱动装置以 广泛的标准产品为您提供前所未有的选择和灵活性,您可 以选择针对您规格的最优化伺服电动机和驱动装置组合。 选择正确的运动控制产品从未象现在这样轻松。您可以从 本产品目录说明的数以千计的伺服电动机 / 驱动装置组合中 挑选也可以访问我们的网站,找到针对您应用的最佳解决 方案。标准的 Kollmorgen AKM 伺服电动机和驱动装置两全 其美 –– 客户解决方案的精确规格,更短的交货期限以及标 准目录产品更低的成本。对于您真正独一无二的运动控制 应用,我们的工程支持团队会与您一起为您的机器设计定 制解决方案。无论是标准产品或者定制产品,您都能够选 出满足您精确要求的运动控制解决方案。
科尔摩根SC900伺服驱动器系列订购指南说明书

This is a Discontinued ProductContact Kollmorgen Customer Support at1-540-633-3545 or email us at if assistance is required.SC900 Servo Drive Family InformationAn SC900 all digital brushless servo can be ordered with or without accessories, such as manuals and mating connectors. Please check your shipment against the following ordering guide to verify you have received what was ordered. If an item is missing or additional accessories are required, please call 815-226-2222 to speak with a Customer Support Representative.ORDER NUMBER CODESC9 0 3 N N - 001 - 01Servo Drive Family DesignationOption Card Designator0 = No option card installed3 = OC930-001-00 serial port option card installed4 = OC940-001-01 SERCOS interface option card installed5 = OC950-X0Y-01 Programmable option card installed(X, Y - See customization code)Power Level2 = 7.5 A peak, 3.75 A continuous at 25° C (77° F)3 = 15 A peak, 7.5 A continuous at 25° C (77° F)4 = 30 A peak, 15 A continuous at 25° C (77° F)5 = 60 A peak, 30 A continuous at 50° C (122° F)Firmware01 = Standard base servo softwareCustomization Code, Factory Assigned001 = Standard unitNote: The following customization codes are only valid when ordering an SC950:501 = Standard OC950 32Kx8 NV RAM, without PacLAN502 = Standard OC950 128Kx8 NV RAM, without PacLAN503 = Standard OC950 32Kx8 NV RAM, with PacLAN504 = Standard OC950 128Kx8 NV RAM, with PacLAN601 = Enhanced OC950 32Kx8 NV RAM, without PacLAN602 = Enhanced OC950 128Kx8 NV RAM, without PacLAN603 = Enhanced OC950 32Kx8 NV RAM, with PacLAN604 = Enhanced OC950 128Kx8 NV RAM, with PacLANFan Kit OptionN = No fan, convection cooled2 = 240 VAC fan, forced air cooled1 = 120 VAC fan, forced air cooledAccessories OptionN = No accessory kitA = Basic connector kit, manual(s)T = Terminal block adapter kit, manual(s)940s include CA940-TB950s include CA950-IOExample Order NumbersPackage Order # Model #s Included DescriptionSC933TN-001-01 SC903-001-01 15 A peak standard servo driveOC930-001-00 Serial port option cardCA903-TB TB adapter SC903 connector kitMA900 SC900 Family Hardware Reference ManualMA930 OC930 Hardware and Software Reference Manual930 Dialogue 3.5" floppySC904AN-001-01 SC904-001-01 30 A peak standard driveCA904 Basic SC904 connector kitMA900 SC900 Family Hardware Reference Manual SC932NN-001-01 SC902-001-01 7.5 A peak standard driveOC930-001-00 Serial port option cardSC954NN-503-01 SC904-001-01 30 A peak standard driveOC950-503-01 OC950 programmable option cardwith 32Kx8 NV RAM and PacLANSCE900 ACCESSORY ORDER NUMBERS Part Order Number CommentsOption CardsBlank panel Firmware upgrade Serial communicationsSERCOS interfaceProgrammable option card OC900-001OC900-002-01OC930-001-0xOC940-001-01OC9500x0y-01Blank panel to cover unused option card slotFirmware upgrade option cardAdds RS-232/485 serial communications(-00 standard, -01 firmware upgrade)Adds SERCOS interface capabilitywhere x determines standard or enhanced firmwarex = 5 for standard firmwarex = 6 for enhanced firmwarewhere y determines the amount of NV RAM and PacLANy = 1 for 32Kx8 NV RAM without PacLANy = 2 for 128 Kx8 NV RAM without PacLANy = 3 for 32 Kx8 NV RAM with PacLANy = 4 for 128 Kx8 NV RAM with PacLANConnector KitsCA90xCA90x=TBCA940-TBCA950-IO where x = power levelBase drive terminal block(s) and D connector matesBase drive terminal block(s) and D connector terminal block adapter matesOC940 J43 Terminal block adapterOC905 Industrial I/O Rack interface adapter boardFan Kitsfor SC9x2 for SC9x3/4 OF902-00xOF903-OOxAdds forced air cooling to SCE900 base drivewhere x = 1 for 120 VAC 60Hzwhere x = 2 for 240 VAC 50/60 HzManualsSC900 base drive OC930 option card OC940 option card OC950 option card MA900MA930MA940MA950-IDEHardware reference manual for SC900Hardware and software referernce manualHardware and software reference manualHardware and software reference manual – plus integrateddevelopment environment on 3.5" diskI/O Emulator BoxSC900 base I/O SC950 I/O IOEM-900IOEM-950Exercises SC900 J4 base drive I/OExercises OC950 J52 option card I/OWiring Diagram。
科尔摩根 Servostar 系列伺服故障代码表
S—故障
超过预设置的位置错误限
n04
响应监控
响应监控(总线)处于激活
n05
供电相位
主干线供电相位太弱
n06
SW限位开关1
低于软件限位开关1
n07
SW限位开关2
超过软件限位开关2
n08
动作任务错误
执行了一个错误动作任务
n09
没有参考点
在动作任务时(HOME设置不对)没有参考点
n10
PSTOP
PSTOP正极限限位开关激活
在温度误差被排除之前可以关闭后再检查
n23-n31
保留
?
n32
硬件测试版本
未发布版本
?
?
警告信息:?
已经发生、但不会引起放大器输出级关闭的故障(BTB/RTO 触点保持闭合),在前面板 LED 显示屏上以警告代码的形式显示。?
E.S.A.P
状态信息
状态信息,没错误,看第88页
. . .
状态信息
更新启动配置.状态信息编程模式n01
负载特性
负载接近临界值
n02
制动功率
达到预设置的制动功率限
E\S\A\P
状态信息
状态信息,没错误,看第88页
. . .
状态信息
更新启动配置
-
状态信息
编程模式
F01*
散热片温度
散热片温度太高,由制造商限制在80度
F02*
过电压
直流总线过压,主要取决电源电压
F03*
跟踪错误
信息来源于位置控制器
F04
反馈电缆
电缆断裂,短路,接地
F05*
欠压
直流总线欠压,由制造商限制在100V
科尔摩根AKD调试手册

科尔摩根A K D调试手册(总2
页)
-CAL-FENGHAI.-(YICAI)-Company One1
-CAL-本页仅作为文档封面,使用请直接删除
(PC单独与驱动器网线连接,不要通过PLC及交换机连接)
1:设置科尔摩根的IP地址: 192.168.0.90 (在驱动器上:S1设置为9,S2设定为0)
2:检测驱动器的连接线是否正确,如果正确,先给驱动器通DC24V电源,主电源先不通。
打开科尔摩根调试软件WORKBENCH并且连接上驱动器。
3:下载固件(AKD-P-NBPN-V01-12-00-000.i00)
4:下载参数配置:
5:设置模式与服务:
设置完成后请点击“保存到设备”进行保存。
6:接通主电源,维修模式调试小门。
(检查原点及定位信号)
7:在上位机的“进出料”菜单设置位置参数。
(进料位置,打开位置,关闭位置,极限位置),具体的方法:1:先回原点
2:维修模式进行位置定位,将上述每个位置进行记录,填写到上位机的参数设置中。
3:手动模式运行,看每个位置是否准备定位。
科尔摩根KOLLMORGEN

科尔摩根KOLLMORGENS300伺服驱动S303 / S306 / S310 / S341 / S343 / S346安装手册目录重要信息在您开始之前设置伺服驱动器的步骤准备建议伺服驱动器额定值外形尺寸安装和温度环境在控制柜中壁挂式或落地式安装接线图概览接线建议驱动器电源接线制动电路规格制动电路接线概览电机电源接线抱闸控制电机编码器接线编码器仿真输出主/从连接外部编码器仿真I/O 配线推荐模拟I/O 连接数字I/O 连接脉冲方向控制接口连接串口通讯连接(X6) CANopen 接口(X6)启动和断开系统检查系统操作的程序面板控制和指示故障诊断及处理警告列表涵义其他故障的涵义4 5 6 7 8 9 10 12 13 15 17 21 22 23 26 27 29 31 32 33 34 36 38 39 40 42 43 46 47 53 553科 尔 摩 根4重要信息通知请注意在安装,操作或者维修设备之前请认真阅读本说明书。
以下警告及需注意的信息会出现在机器存在潜在危险的地方。
在危险或警告标志前面的叹号安全标志指出存在电气危险,不遵守规则将会导致人身伤害。
这是安全警告标志。
它被用来警告您潜在的人身伤害危险。
遵守所有标志后面的安全信息以避免可能的人身伤害。
电气设备只能由专业人员提供服务。
科尔摩根不对任何因使用本手册而产生的后果负责。
针对未经培训的人员,此文档不被指定为安装手册。
©2015科尔摩根公司版权所有。
在您开始之前请认真地阅读下面的预警,以保证您的个人安全。
如不遵守将导致严重人身伤害或设备损坏。
5科 尔 摩 根6设置伺服驱动器的步骤准备建议设备供给包括以下元件:·伺服驱动器 ·一个简单的手册 ·一个 CD 文件光盘 ·连接头 X0, X3, X4, X8, X9 · 一个屏蔽夹具处理和储存为了在安装之前保护好伺服驱动器,请将它存放在包装中,并保证周围环境是可接受的。
科尔摩根定位控制

科尔摩根定位控制
科尔摩根定位控制是指通过科尔摩根伺服驱动器实现精准定位的方法。
其具体步骤如下:
1. 设置伺服电机的内部转矩限制值。
2. 设置值是额定转矩的百分比。
3. 任何时候,这个限制都有效。
4. 设定位置控制方式下定位完成脉冲范围。
5. 本参数提供了位置控制方式下驱动器判断是否完成定位的依据,当位置偏差计数器内的剩余脉冲数小于或等于本参数设定值时,驱动器认为定位已完成,到位开关信号为ON,否则为OFF。
6. 在位置控制方式时,输出位置定位完成信号。
7. 设置值是表示电机从0~2000r/min的加速时间或从2000~0r/min的减速时间。
8. 加减速特性是线性的。
科尔摩根 (Kollmorgen) KBM无框架直驱电机产品介绍

KBM成功案例介绍 KBM电机典型的应用行业
• Precision Industrial Automation精密工业自动化应用 • Machine Tool Rotary Indexer机床分度台 • Medical Robots 医疗机器人 • Pumping Systems 泵系统控制 • Hydraulic Motor Replacement 替换液压电机 • Camera Motion Control / Image Stabilization 摄像头运动控制/ 图 像定影 • Alternative Energy [Generators, Actuators] 能量转换(发电机, 执行器) • Printing Machinery 印刷机
19
19
直接驱动技术的特点及优势
将负载直接耦合到电机转子上
• 电机转矩密度高,所需安装空间小; • 省去减速箱、皮带等传动装置,直接输出 所需力矩及速度; • 减少了部件数量,减少故障点,降低机器 故障时间,提高产出率; • 降低了安装时间,大大减少维护工作; • 提高系统刚性,获得更高伺服带宽; • 改善谐振特性,提高伺服性能; • 消除传动间隙,可适应1000:1的惯量比; • 转子中心可走线及气路; • 运行更安静,降噪20dB; • ……
选型过程: ->机械参数 ->运动参数 ->选型结果 ->余量分析 ->再生能量计算
13
13
KBM网上资料来源
• 文字资料:KBM选型指南及安装指导
/zh-cn/misc/产品资料/
•
KBM电机全系列2D、3D图纸免费下载 ,直接导入绘图软件使用:
科尔摩根 (Kollmorgen) KBM无框架直驱电机产品介绍
科尔摩根直线电机选型指南说明书
科尔摩根直接驱动直线电机选型指南带有AKD TM 伺服驱动系统尔2K O LLM O R G E N 科摩根3目录直接驱动直线(DDL )电机4AKD ™伺服驱动 10 联合研发能力 14 直接驱动直线电机综述 15 无铁芯 - 非冷却型DDL 的数据和尺寸IL06 系列 18 IL12 系列 20 IL18 系列 22IL24 系列 26无铁芯磁路 28 有铁芯DDL 的数据和尺寸ICD05 系列 32ICD10 系列 34ICD 磁路 36 有铁芯- 非冷却型DDL 的数据和尺寸IC11 系列 40 IC22 系列 42 IC33 系列 46IC44 系列 50 有铁芯- 水冷型DDL 的数据和尺寸IC11 系列 54 IC22 系列 56 IC33 系列 60IC44 系列 64有铁芯磁路 68 连线和输出 70高柔性电缆组 72 应用选型 74 型号命名规则 78MOTIONEERING ® 应用引擎81科尔摩根直接驱动直线电机选型指南克服设计、采购和时间障碍科尔摩根很清楚:如果能够帮助原始设备制造商的工程师克服遇到的障碍,就可以显著提高其工作成效。
因而,我们主要通过如下三种方式来帮助他们:集成标准和定制产品在很多情况下,最佳方案都不是一成不变的。
我们拥有专业应用知识,可以根据全面的产品组合来修改标准产品或开放全定制解决方案,从而为设计奠定良好的基础。
提供运动解决方案而不仅仅是部件在各公司减少供应商数量和工程人力的过程中,他们需要一家能够提供多种集成解决方案的全系统供应商。
科尔摩根就采用了全面响应模式,为客户提供全套解决方案,这些方案将编程软件、工程服务以及同类最佳的运动部件结合起来。
覆盖全球我们在北美、欧洲、中东和亚洲拥有众多直销、工程支持团队,制造工厂以及分销商,并且临近全球各地的原始设备制造商。
这种便利优势可以加速我们的供货过程,根据客户需要随时随地供货。
财务和运营稳定性科尔摩根的母公司是价值130亿美元的丹纳赫集团。
使用 Kollmorgen Goldline 系列伺服电机与 AKD 驱动器说明书

科尔摩根DDLMotor直线驱动直接电机手册
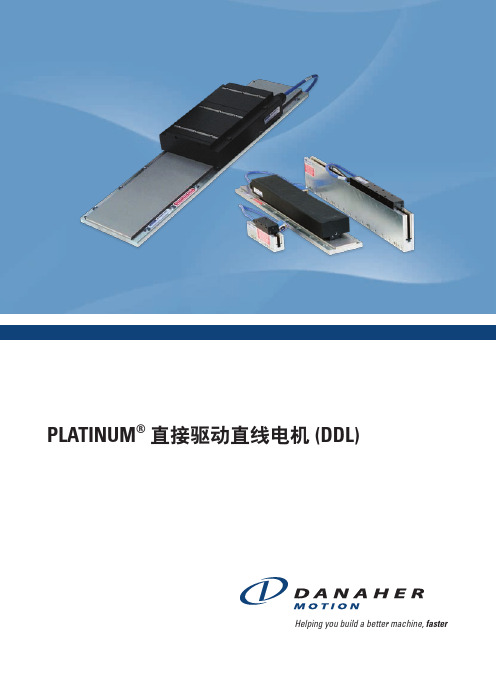
科尔摩根公司 Platinum® DDL 系列永磁体总成由 5 个模块化 部分构成:长度分别为 64 毫米、128 毫米、256 毫米、512 毫米和 1024 毫米。每个模块均可按所需的数目增加到任何 长度,以实现无限行程。无论所需行程是 1 毫米(0.04 英寸) 还是 100 米(330 英尺),PLATINUM® DDL 系列永磁体总成均 可满足要求。
标准特性:
无铁芯电机:
• 峰值推力为 60 ~ 1600 N(13.6 ~ 360 lbf); • 持续推力为 21 ~ 450 N(4.6 ~ 101 lbf); • 零齿槽效应; • 零吸力; • 运动平稳,可提供 1 微米 / 秒(0.00004 英寸 / 秒)的
最低速度; • 低质量的线圈总成,可提供高加速度;
定子
N
S
绕组 气隙
滑块
旋转
永磁体
底座
转子电机
直线电机
沿径向剖开并拉直的旋转电机
机没有铁芯或用于缠绕线圈的长槽。因此,无铁芯电机具 有零齿槽效应、非常轻的质量以及在线圈总成与永磁体总 成之间绝对没有吸引力。这些特性非常适合需要极低轴承 摩擦力、轻载荷高加速度,以及能在极小的恒定速度下运 行(甚至是在超低速度下)。模块化永磁体总成由双排永磁 体总成组成,以产生成最大的推力,并形成磁通返回的路径。
对于特别平稳的运动要求,正弦波驱动器(例如,采用数 字霍耳效应的科尔摩根公司 ServoStar® 系列)可为电机提 供正弦波驱动电流,以实现最佳的恒力和恒速性能。
有铁芯电机
无铁芯电机
作 为 一 个 可 选 方 案, 对 于 直线电机应用通常配一个 直 线 编 码 器, 作 为 位 置 反 馈。 现在日益普遍采用的 驱 动 放 大 器(例 如, 科 尔 摩根公司 ServoStar 数字放 大器),直接从直线编码器 中产生所需要的换向信息 (在启动时无论是否有附加 的数字霍耳效应装置)。直 线电机应用中所使用的其 它类型反馈包括直线感应 同步器、激光干涉仪以及 LVDT 位移传感器。
科尔摩根伺服电机编码器原理
科尔摩根伺服电机编码器原理
科尔摩根伺服电机编码器是一种用来测量电机转动角度的装置。
它由一个光电二极管和一个透明码盘组成。
透明码盘上刻有一系列等距离的光栅,光电二极管则通过光电效应来检测这些光栅。
当电机旋转时,其轴上的编码器也会随之旋转。
光电二极管发出的光束穿过透明码盘上的光栅,然后被光电二极管接收。
根据光栅的刻度和光电二极管接收到的光强信号,编码器可以准确地测量电机的角度。
科尔摩根伺服电机编码器采用的是增量式编码器原理。
增量式编码器将旋转运动转化为连续的脉冲信号。
当电机旋转时,光电二极管会周期性地接收到光栅的光束,然后输出相应的电信号。
通过统计脉冲信号的数量和方向,我们可以精确地计算出电机旋转的角度和速度。
这种编码器的测量精度主要取决于光栅刻度的密度,即每个光栅的单位角度。
科尔摩根伺服电机编码器的原理关键在于光电效应的利用和脉冲信号的计数。
它具有高精度、高可靠性和快速响应的特点,广泛应用于工业控制、自动化设备和机器人等领域。
总结起来,科尔摩根伺服电机编码器原理是利用光电效应和脉冲信号计数来测量电机旋转角度和速度。
它是一种高精度、高可靠性的装置,被广泛应用于各个工业领域。
科尔摩根 servotronix icu 接口控制器 canopen 实现 文件说明书

Document Title:ICU Page 1 of 11Written By: Dany Authorized By: Sagi Authorization Date:03 September 2003ICU CAN OPEN I MPLEMENTATIONICU drive will work according to Standard DS102 to DSP402 ,DSP402 Version V2.0, We will implement only the following variable and command . Note:DSP 402 is standard for Drives and Motion control where you can find description of any function that is implemented Indexer will only transfer String of KOLLMORGEN SERVOSTAR Variables and commands + address this string will be transfer as is to the addressed CD Drive. For KOLLMORGEN SERVOSTAR Variables and commands please refer to “VarCom Reference Guide” manualDocument Title:ICUPage 2 of 11Written By: Dany Authorized By: SagiAuthorization Date:03 September 2003Machine AMachine BInputs:System DiagramDocument Title:ICU Page 3 of 11Written By: Dany Authorized By: Sagi Authorization Date:03 September 2003System diagram for Communication architectureDocument Title:ICU Page 4 of 11Written By: Dany Authorized By: Sagi Authorization Date:03 September 20031. Required FunctionalityThe following table contains a list of all the functions required or there link for the ICU and for the Indexer:For Reference document see file _00x.html This file is up dated and send togther w/ the release ICU F/W.The Variable/Command in ( ) are the equivalent Variable/Command of the SERVOSTAR.Function Direction Description Object Dictionary / Message Implemented Motion MessagesTo ICU Homes head servo motorhard stop homing 607C home_ offset (HOMEOFST)6099 homing_ speeds (HOMESPD)2004 homing Torque limit (HOMEILIM)YesYesYesHomeTo Indxer Homes indexer servomotor or lift servo motorpositive proximity switchhoming MH [in pos ack]HOMETYPE 0 to 5HOMESPD -VMAX to VMAXHOMESTATE 0-11YesTo ICU servo motor jog 6042 VI Target velocity (J)606C Velocity actual value (V) Yes YesVelocity loopJogTo Indxer J[speed]{time}V -15000 to 15000YesPosition loop Move Absolute (PTP) To ICU moves head servo motorfrom point to point607A Target position (MA MI defined by control word)6064 Position actual value (PFB)60F4 Following error actual value (PE)YesYesYesDocument Title:ICU Page 5 of 11Written By: Dany Authorized By: Sagi Authorization Date:03 September 2003ToIndxermoves indexer servomotor or lift servo motorfrom point to point MA <position> <velocity> [in pos ack]MI <pos> <vel> [in pos ack]PFB +/- 2,147,483,647PE +/- 2,147,483,647YesTo ICU Stop motion immediately,using fast deceleration 605D Halt option code NoStopTo Indxer stops indexer motionimmediately, using fastdecelerationSTOP Yes To ICU 605C Disable operation option code NoDisableTo Indxer K YesDrive ConfigurationTo ICU 60F6h RECORD Torque control parameters ( manufacturer specific) NoTorque controlparameterTo Indxer SeeVarCom YesDocument Title:ICU Page 6 of 11Written By: Dany Authorized By: Sagi Authorization Date:03 September 2003To ICU 60F9 Velocity control parameter setENTRY DESCRIPTION (Sub 3 to Sub- Index 254 manufacturer specific)Sub- Index 0 number of entries xSub- Index 1 Gain (KV)Sub- Index 2 TI – integration time constant (KVI)Sub- Index 3 Feed Forward (KVFR)Sub- Index 4 VF filter B0Sub- Index 5 VF filter B1Sub- Index 6 VF filter B2Sub- Index 7 VF filter BshiftSub- Index 8 VF filter A1Sub- Index 9 VF filter A2Sub- Index 10 VF filter AshiftSub- Index 11 VD filter D1Sub- Index 12 VD filter D2Sub- Index 13 VD filter Dshift PartialVelocity controlparameterTo Indxer SeeVarCom YesTo ICU60FB Position control parameter set ( manufacturer specific)ENTRY DESCRIPTION (Sub 1 toSub- Index 254 manufacturer specific)Sub- Index 0 number of entries 4Sub- Index 1 Position loop proportional (GP)Sub- Index 2 Position loop integral gain (GPI)Sub- Index 3 Position loop integrator input saturation (GPSTAIN)Sub- Index 4 Position loop loop integrator input saturation (GPSATOUT)NoPosition controlparameterTo Indxer See VarCom YesTo ICUTBDTo IndxerDocument Title:ICU Page 7 of 11Written By: Dany Authorized By: Sagi Authorization Date:03 September 2003Document Title:ICU Page 8 of 11Written By: Dany Authorized By: Sagi Authorization Date:03 September 2003FromIndexerIN 000 - 111 (0=off, 1=on) Yes Analog input From ICU Temperature sensorRead only variable 0 to655362000 Temperature actual value (ANSENS)YesTo ICU The Master writes the stateof the outputs 60FE Digital outputs (MACHOUT) YesDigital OutputsTo Indexer O1 0 or 1 RELAY 0 = relay open 1 = relay closed Yes RS 485 to LCD Display and to CD’sWrite to ICU/Indexer RS485 port To ICU orIndexerThe Master sends a stringmessage to theICU/Indexer.2006 send RS485 string (RS485XMT) YesRead from ICU/Indexer RS485 port From ICUor IndexerICU/Indexer hold a buffer of80 characters, the statusword show if new string arrin the buffer2005 recive RS485 string (RS485RD) YesRS 232Write to ICU/Indexer RS232 port To ICU orIndexerThe Master sends a stringmessage to theICU/Indexer.2008 send RS232 string From F/W0.0.6Read from ICU/Indexer RS232 port From ICUor IndexerICU/Indexer hold a buffer of80 characters, the statusword show if new string arrin the buffer2007 receive RS232 string From F/W0.0.6Control Status and DiagnosticsControl ICU 6040 ControlwordFor full description please refer to CANOpen CiA DSP 402 for themechanism and to _00x.html for the implementation.PartialDocument Title:ICU Page 9 of 11Written By: Dany Authorized By: Sagi Authorization Date:03 September 2003Indexer SeeVarCom YesFrom ICU 6041 StatuswordFor full description please refer to CANOpen CiA DSP 402 for themechanism and to _00x.html for the implementation.PartialStatusFrom Indexer SeeVarCon Yes From ICU 2009 Drive fault From F/W0.0.7Read faultFrom Indexer SeeVarCom Yes To ICU 1001 Error Registry NoError faultTo indexer See VarCom YesPre-DefinedErrorICU 1003 Pre-defined error NoTo ICU 6060 Modes of operation (OPMODE n)Note: the numbering of CAN and SERVOSTAR for operation mode isdifferent. YesChange opmodeTo indexer OPMODE n YesFrom ICU 6061 Modes of operation display YesRead OpmodeFromIndexerOPMODE Yes From ICU 100A manufacturer software version YesRead versionFrom Indexe r VER YesDocument Title:ICU Page 10 of 11Written By: Dany Authorized By: Sagi Authorization Date:03 September 2003 2. AddressDip switch 1 to 6 Set the ICU CAN MAC address (0 to 63 CAN nodes).3. Baud rateDip switch 7 and 8 Set the ICU CAN baud rateRateSW7 SW8 Baud1 (On) 0 (Off) 125 kbps0 (Off) 1 (On) 250 kbps1 (On) 1 (On) 500 kbps (Default)4. PDO –Process Data Object (Send)ICU/Indexer uses the first PDO message for Drive Keypad and Input Status.5. SDO- Service Data Object (Send + Acknowledge)All objects are transfer in this format.6. ProfilesNot in use7. Protocol7.1 SYNC ObjectNot in useDanaher Motion GPS – Kollmorgen ServotronixDepartment: Specialty Electronic Products Revision No:Document Title:ICU Page 11 of 11Written By: Dany Authorized By: Sagi Authorization Date:03 September 20037.2 Time Stamp ObjectNot in use7.3 Emergency ObjectNot in use7.4 Heart Beat ObjectNot in use8. Messages timingIf baud rate 500kpbsSDOMaster to ICU/Indexer App 83 bit.ICU/Indexer acknowledge to Master App 19 bitOne SDO App 120 bit500/120 = 4.166 KMessages/Sec gives 0.24 mSec for SDOICU/Indexer process time 0.5 mSec0.24 + 0.5 = 0.74 mSec for SDO message from Master to ICU/Indexer include the acknowledge.。
科尔摩根的AKD_ BASIC伺服驱动器助您更快地制造更紧凑、更高效的机器

科尔摩根的AKD™ BASIC伺服驱动器助您更快地制造更紧凑、更高效的机器作者:来源:《工业设计》2012年第12期AKD® BASIC采取可编程的单轴机器和运动控制功能,可以帮助工程师快速完成在驱动器层面定制性能设计全球领先的运动控制提供与服务商科尔摩根公司推出了AKD™ BASIC伺服驱动器。
这些驱动器是基于以太网设计的,采用了一个集成的单轴运动控制器。
与驱动器和PLC分离的方案相比,此类驱动器可以帮助原始设备制造商生产结构更紧凑,效率更高的机器。
集成的运动控制器提供了凸轮、S 曲线和自由形式运动轮廓功能,另外还有BASIC 编程语言和带调试工具的内置程序编辑器,简化了用户操作。
因此,机器制造者可以更快地完成复杂的制造过程。
科尔摩根的产品经理Reid Hunt 说:“作为AKD 伺服驱动器系列产品,AKD BASIC 达到了机器制造商的预期要求,它们集成了便捷的单轴运动控制器,通过有效的方式用一个设备取代了两个设备。
AKD BASIC伺服驱动器为原始设备制造商提供了强大的工具,帮助他们对机器性能进行差异化,满足客户的独特需求,避免了因为供应商定制运动部件而花费的时间和成本。
”在驱动器中直接集成机器控制功能,设计工程师在设计机器的过程中,就可以不使用某些中小型PLC ,减少了连线、部件数量、以及专用面板空间。
这样一来,原始设备制造商就可以降低机器的成本和尺寸。
AKD BASIC 也很适合仍然需要采用多个接口的PLC ,其中包括数字I/O 以及以太网通信接口。
集成的高性能运动控制器可以帮助用户运行更复杂的动作,提高单轴应用的机器效率。
借助快速中断例程和条件式“when” 语句,可以确保快速执行程序,这对于同步运动和机器控制具有重要意义。
这些例程和“when” 语句每250微秒被扫描一次。
因为BASIC编程语言简单易懂,简化了程序流程控制,从而显著缩短了完成项目代码所需的时间,所以用户能够更快地操作和运行。
科尔摩根 模块化直接驱动旋转电机选型指南 带 AKD 系列伺服驱动系统说明书

科尔摩根模块化直接驱动旋转电机选型指南带有AKD系列伺服驱动系统科尔摩根:您在运动控制领域的最佳合作伙伴在设计每一个解决方案之前,我们都会深入了解机器设计者和用户所面临的困难。
目录◆ 直接驱动电机概述 4◆ 模块化直接驱动旋转® (DDR) 电机 6◆ 冲床给料设备应用 9◆ 系统概述 10 C(H)04x, C(H)05x, C(H)06x, C(H)09x, C(H)13x◆ 性能数据 12 C(H)04x, C(H)05x, C(H)06x, C(H)09x, C(H)13x◆ 外形图 28 C(H)04x, C(H)05x, C(H)06x, C(H)09x, C(H)13x◆ 安装要求 36 C(H)04x, C(H)05x, C(H)06x, C(H)09x, C(H)13x◆ 模块化DDR ®的连接器引脚分配 38◆ 模块化DDR ®到AKD 系列电缆 39◆ 模块化DDR ®的型号命名 40◆ AKD 系列伺服驱动器 42 AKD ®2G 伺服驱动器 AKD ®伺服驱动器◆ AKD 系列伺服驱动器的型号命名 52◆ 科尔摩根解决方案 55 自动化和运动控制 自助工具科尔摩根模块化直接驱动旋转电机选型指南克服设计、采购和时间障碍科尔摩根深知:如果能帮助原始设备制造商的工程师清除各种障碍,就可以显著提高其工作效率。
因而,我们主要通过如下三种方式来帮助他们:集成标准和定制化产品在很多情况下,最佳方案都不是一成不变的。
我们拥有专业应用知识,可以根据全面的产品组合来修改标准产品或开发完全定制化的解决方案,从而为设计奠定良好的 基础。
不仅提供部件,而且提供运动控制解决方案随着企业逐渐缩减供应商数量并精简工程设计团队,他们需要能提供广泛集成解决方案的全系统供应商。
科尔摩根可以提供完整的解决方案以及运动子系统,并将编程软件、工程设计服务以及一流的运动组件有机结合在一起。
Kollmorgen(科尔摩根)电机及ServoStar驱动器、AKD伺服驱动器

Kollmorgen(科尔摩根)电机及ServoStar驱动器、AKD伺服驱动器业界领先的Kollmorgen伺服电机拥有着无与伦比的质量、高度的灵活性和卓越性能,使您能够选择最适合自身技术规范的最佳伺服电机。
这些电机运行平稳,具有极高的转矩输出和加速性能,可适合各种高性能应用。
Kollmorgen拥有一整套提供高级控制技术的驱动器产品线,所有驱动器都具有紧凑的外壳包装并且可以非常简单的进行试运行。
客户可以在在交流伺服、直流伺服、调速驱动、步进和OEM/客户定制驱动产品中自由选择,所有产品都具有宽泛的电源电压输入范围和功率范围。
Kollmorgen品牌涵盖了运动控制器、、伺服驱动器、伺服电机、直线电机,力矩电机等多种产品,其中伺服电机和伺服驱动器主要包括以下系列产品:Kollmorgen AKM伺服电机、Kollmorgen PLATINUM DDL直线电机、Kollmorgen GOLDLINE DDR直驱力矩伺服电机、Kollmorgen CARTRIDGE DDR直驱伺服电机、Kollmorgen GOLDLINE伺服电机、Kollmorgen GOLDLINE BH/MH系列伺服电机、Kollmorgen GOLDLINE B/M/EB(防爆)/BE/ME系列伺服电机Kollmorgen GOLDLINE XT系列MTXXX伺服电机、Kollmorgen DBL/DBK同步伺服电机、Kollmorgen Seidel同步伺服电机、Kollmorgen Bautz同步伺服电机、Kollmorgen F/FH无框力矩伺服电机、Kollmorgen RBE(H)无框力矩伺服电机、Kollmorgen BM(S)无框力矩伺服电机、Kollmorgen DDR直驱力矩电机、Kollmorgen 直驱无框力矩电机、Kollmorgen Inland直驱直流力矩电机、Kollmorgen ServoDisc有刷直流伺服电机、Kollmorgen Bautz Servo Linear Actuators、Kollmorgen SERVOSTAR CD伺服驱动器、Kollmorgen SERVOSTAR CD SynqNet伺服驱动器、Kollmorgen SERVOSTAR200(S200)伺服驱动器、Kollmorgen SERVOSTAR400(S400)伺服驱动器、Kollmorgen SERVOSTAR300(S300)伺服驱动器、Kollmorgen SERVOSTAR600(S600)伺服驱动器、Kollmorgen SERVOSTAR700(S700)伺服驱动器、Kollmorgen AKD伺服驱动器。
科尔摩根(Kollmorgen)与Thomson传动解决方案造就高性能F-1模拟器
科尔摩根(Kollmorgen)与Thomson传动解决方案造就
高性能F-1模拟器
佚名
【期刊名称】《《可编程控制器与工厂自动化(PLC FA)》》
【年(卷),期】2009(000)008
【摘要】2009年7月31日,丹纳赫传动的子公司科尔摩根(Kollmorgen)与Thomson为英国Ball Racing Developments公司(BRD)提供了整套传动控制解决方案——BRD-05 F-1赛车模拟器。
新的传动平台由科尔摩根AKM伺服电动机、科尔摩根伺服驱动器、Thomson滚珠丝杠组件和Thomson500系列成型导轨组成。
相对于BRD以前采用的传动控制解决方案,它更加紧凑、高效,性能更高,可帮助BRD实现其目标——即让世界上数百万车迷都能参与昂贵得常常使人望而却步的赛车运动。
【总页数】1页(P15)
【正文语种】中文
【中图分类】U666.158
【相关文献】
1.科尔摩根推出新包装解决方案,助您获得更大成功 [J],
2.丹纳赫传动推出新款Thomson不锈钢多滚道滚珠衬套轴承,高性能设计胜任苛刻环境——超高的品质设计和材料实现了最佳可靠性,同时节省了空间和系统成本 [J], 无
3.科尔摩根与Thomson造就高性能F-1模拟器 [J],
4.科尔摩根联手Thomson打造F-1模拟器 [J],
5.科尔摩根推出AKD高性能伺服驱动器 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。