STM32f103定时器输出PWM波驱动LED的呼吸灯
PWM原理及应用 呼吸灯
PWM(Pulse Width Modulation)是一种调制技术,通过调节信号的脉冲宽度来控制输出信号的平均功率。
在电子电路和控制系统中有广泛的应用,其中之一就是呼吸灯效果的实现。
PWM原理:
PWM的原理是通过控制高电平(ON)和低电平(OFF)的时间比例来实现对输出信号的控制。
当调节脉冲的宽度时,我们可以改变信号的占空比(Duty Cycle),即高电平所占的时间与一个周期的比例。
占空比越大,输出信号的平均功率越高;占空比越小,输出信号的平均功率越低。
呼吸灯的应用:
呼吸灯效果是一种模拟人类呼吸的闪烁效果,常用于装饰、指示和环境氛围营造等场景。
通过使用PWM技术,可以实现呼吸灯效果。
1. 硬件实现:在硬件上,可以使用微控制器或单片机来生成PWM信号,并通过驱动电路驱动LED灯。
通过改变PWM信号的占空比,可以实现LED灯的亮度渐变效果,从而呈现出呼吸灯的效果。
2. 软件实现:在某些开发平台上,也可以通过编写代码来实现呼吸灯效果。
通过控制IO口的高低电平切换时间和占空比,可以模拟出PWM信号。
这种方法通常适用于一些简单的应用场景。
无论是硬件实现还是软件实现,关键在于控制PWM信号的频率和占空比。
频率决定了信号的周期,占空比决定了信号高电平和低电平的时间比例。
总结起来,PWM技术通过调节信号的脉冲宽度来控制输出信号的平均功率。
在呼吸灯的应用中,通过改变PWM信号的占空比,可以实现LED灯的亮度渐变效果,从而呈现出呼吸灯的效果。
stm32单片机设计实现呼吸灯效果知识应用
我们来探讨一下“STM32单片机设计实现呼吸灯效果”这一主题。
呼吸灯效果是指LED灯逐渐由暗到亮再由亮到暗的渐变效果,仿佛在呼吸一样,因此得名“呼吸灯”。
在嵌入式系统和物联网设备中,呼吸灯是一种常见的人机交互界面,其设计实现涉及到PWM调光技术和定时器中断控制等内容。
在STM32单片机中,实现呼吸灯效果最常用的方法是利用定时器和PWM模块。
我们需要配置定时器的计数周期和预分频系数,以确定呼吸灯的周期和频率。
利用PWM模块控制LED的亮度,根据呼吸灯的状态变化不断更新PWM占空比,从而实现呼吸灯的效果。
在具体的程序设计中,我们可以使用STM32提供的HAL库函数或者直接操作寄存器的方法来实现呼吸灯效果。
在HAL库函数的调用中,需要先初始化定时器和PWM模块,然后在定时器中断中更新PWM的占空比,从而实现呼吸灯效果。
而如果选择直接操作寄存器的方法,需要对寄存器进行设置和操作,相对更加灵活和高效。
除了硬件设计和软件编程,实现呼吸灯效果还需要考虑功耗和灯光效果的优化。
在实际应用中,我们可以通过调节呼吸灯的周期和频率,以及优化PWM输出的方式来达到节能和良好的视觉效果。
还可以考虑使用多个LED灯和不同颜色的混合,设计出更加丰富多彩的呼吸灯效果。
STM32单片机设计实现呼吸灯效果是一个涉及硬件设计和软件编程的综合应用,需要结合定时器、PWM模块和中断控制等知识,并注重功耗和灯光效果的优化。
通过深入理解和实践,我们可以设计出满足用户需求的呼吸灯效果,为嵌入式系统和物联网设备增添更加灵动的人机交互界面。
我的个人观点是,在实际应用中,呼吸灯效果是一种简洁而又美观的人机交互设计,能够为产品增添更加智能和生动的氛围。
掌握STM32单片机设计实现呼吸灯效果的知识和应用技巧对于嵌入式系统工程师和物联网设备开发者来说是非常重要的。
希望通过本文的介绍,读者能对这一主题有更加全面、深刻和灵活的理解。
我们来探讨一下“STM32单片机设计实现呼吸灯效果”这一主题。
任务7 实现呼吸灯

一、任务描述
① 采用智能小车STM32F4核心板的TIM5定时器PWM输出功能,输出PWM控制 LED1。
② 通过有规律的改变PWM占空比,进而改变LED1灯的亮度,达到呼吸灯的效果。
二、任务分析
1. 硬件电路分析 智能小车STM32F4核心板的LED1电路,在前面已经介绍了,这部分电路分 析省略。
2.软件设计 ① 新建一个PWM工程,或者在上一个工程中进行修改。 ② 按照STM32F4的GIPO的开发步骤,初始化LED1所接的PH12引脚。 ③ 对TIM5定时器进行初始化,使得TIM5通道CH3输出PWM(PH12引脚)。 ④ 调整PWM占空比,控制LED1亮度有规律的变化,达到呼吸灯的效。
② TIM5_PWM_OutPut()函数是负责修改定时器TIM5通道CH3输出的PWM占空 比的。
③ 在主文件main.c中,主要是通过调整定时器TIM5通道CH3的PWM占空比, 控制LED1亮度有规律的变化,达到呼吸灯的效果。
三、任务实施
“实现呼吸灯”任务实施,有以下几个步骤。 4.第4步:程序编译及调试
① 编译无误后,点击MDK5的工具栏【 】图标,将程序下载到芯片之中。 ② 上电运行,观察LED1是否按照“亮->暗->亮->暗”的循环变化,具有呼
吸灯的效果。若不符合任务要求,需修改代码直到符合任务要求为止。 任务拓展训练
在本任务基础上,通过按键KEY1和KEY2,来改变STM32F4定时器TIM5通道 CH3输出的PWM占空比,达到调节LED1灯的亮度。按键KEY1是增加LED1灯 的亮度,按键KEY2是降低LED1灯的亮度。
感谢
谢谢,精品课件
资料搜集
三、任务实施
“实现呼吸灯”任务实施,有以下几个步骤。 1.第1步:硬件连接
使用STM32F103系列芯片点亮LED流水灯(STM32入门)

使用STM32F103系列芯片点亮LED流水灯(STM32入门)STM32F103系列芯片是意法半导体(STMicroelectronics)推出的一款32位ARM Cortex-M3内核的微控制器。
本文将介绍如何使用STM32F103系列芯片点亮LED流水灯,从而帮助初学者入门STM32首先,我们需要准备以下材料和工具:1. STM32F103系列开发板(如:STMicroelectronics的STM32F103C8T6开发板)B转串口模块3.杜邦线和杜邦线母头4.面包板(可选)5.电脑接下来,我们将一步一步地进行操作。
第一步,准备环境:2.将USB转串口模块连接到STM32开发板上,用于通过串口与电脑进行通信。
第二步,编写代码:在STM32CubeIDE中创建一个新项目,并选择适合的开发板型号和启动文件。
然后,将以下代码复制到main.c文件中:```#include "stm32f1xx.h"void delay(int n)for(int i=0; i<n; i++);int main(void)GPIOC->CRH &= 0xFF0FFFFF; // Clear PC13 configurationwhile(1)// Turn on the LED// Delay// Turn off the LED// Delay}```第三步,编译和烧录:在STM32CubeIDE中,使用编译工具将代码编译成可执行文件。
然后,通过USB转串口模块将编译后的可执行文件烧录到STM32开发板中。
第四步,连接LED:在STM32开发板上找到PC13引脚,将LED的长针连接到PC13引脚上,将LED的短针连接到开发板的地线上。
可以使用面包板或杜邦线连接器来连接LED和开发板。
第五步,运行程序:将STM32开发板连接到电脑上,通过串口与开发板进行通信,然后运行编译后的程序。
STM32F103学习笔记(八)PWM输出
STM32F103学习笔记(八)PWM输出脉冲宽度调制(PWM),是对脉冲宽度的控制。
STM32 的定时器除了 TIM6 和 7。
其他的定时器都可以用来产生PWM 输出。
其中高级定时器 TIM1 和 TIM8 可以同时产生多达 7 路的 PWM 输出。
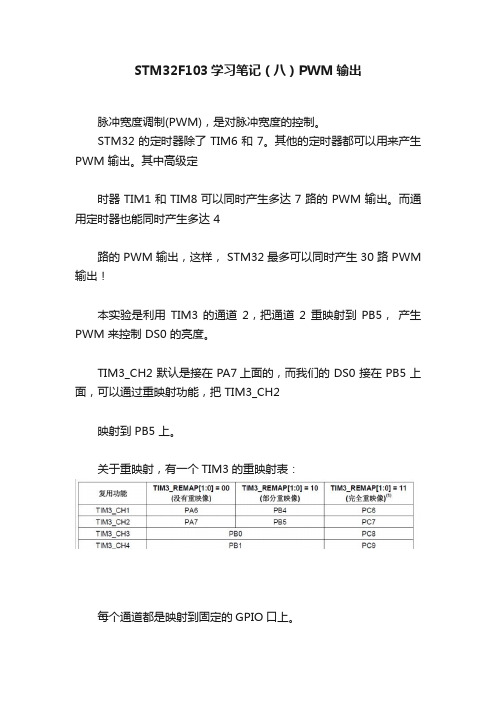
而通用定时器也能同时产生多达 4路的 PWM 输出,这样, STM32 最多可以同时产生 30 路 PWM 输出!本实验是利用TIM3 的通道2,把通道2 重映射到PB5,产生PWM 来控制 DS0 的亮度。
TIM3_CH2 默认是接在 PA7上面的,而我们的 DS0 接在 PB5 上面,可以通过重映射功能,把 TIM3_CH2映射到 PB5 上。
关于重映射,有一个TIM3的重映射表:每个通道都是映射到固定的GPIO口上。
下面是关于time.c文件:[csharp] view plain copy1.//TIM3 PWM 部分初始化2.//PWM 输出初始化3.//arr:自动重装值4.//psc:时钟预分频数5.void TIM3_PWM_Init(u16 arr,u16 psc)6.{7.GPIO_InitTypeDef GPIO_InitStructure;8.TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;9.TIM_OCInitTypeDef TIM_OCInitStructure;10.RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, EN ABLE); //①使能定时器 3 时钟11.RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|12.RCC_APB2Periph_AFIO, ENABLE); //①使能 GPIO 和 AFIO 复用功能时钟13.GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENA BLE); //②重映射 TIM3_CH2->PB514.//设置该引脚为复用输出功能,输出 TIM3 CH2 的 PWM 脉冲波形 GPIOB.515.GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH 216.GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出17.GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz ;18.GPIO_Init(GPIOB, &GPIO_InitStructure); //①初始化 GPIO19.//初始化 TIM320.TIM_TimeBaseStructure.TIM_Period = arr; //设置在自动重装载周期值21.TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置预分频值22.TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim23.TIM_TimeBaseStructure.TIM_CounterMode = TIM_Cou nterMode_Up; //TIM 向上计数模式24.TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //③初始化 TIMx25.//初始化 TIM3 Channel2 PWM 模式26.TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_P WM2; //选择 PWM 模式 227.TIM_OCInitStructure.TIM_OutputState = TIM_OutputSt ate_Enable; //比较输出使能28.TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity _High; //输出极性高29.TIM_OC2Init(TIM3, &TIM_OCInitStructure); //④初始化外设 TIM3 OC230.TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能预装载寄存器31.TIM_Cmd(TIM3, ENABLE); //⑤使能 TIM332.}主函数:[csharp] view plain copy1.int main(void)2.{3.u16 led0pwmval=0;4.u8 dir=1;5.delay_init(); //延时函数初始化6.NVIC_Configuration(); //设置 NVIC 中断分组 2:2 位抢占优先级, 2 位响应优先级7.uart_init(9600); //串口初始化波特率为 96008.LED_Init(); //LED 端口初始化9.TIM3_PWM_Init(899,0); //不分频,PWM 频率=72000/900=8Khz10.while(1)11.{12.delay_ms(10);13.if(dir)led0pwmval++;14.else led0pwmval--;15.if(led0pwmval>300)dir=0;16.if(led0pwmval==0)dir=1;17.TIM_SetCompare2(TIM3,led0pwmval);18.}19.}。
STM32F103使用TIM3产生四路PWM

STM32F103使⽤TIM3产⽣四路PWMSTM32F103 使⽤TIM3产⽣四路PWM程序如下:/******************************************************************************** 程序说明 : 思路PWM波⽣成函数* 函数功能 : 使⽤TIM3的PWM功能⽣成思路PWM,* 输⼊ : ⽆* 输出 : 四路PWM,通过GPIO引脚复⽤,对TIM3的四个输出通道引脚重映射为PC6、PC7、PC8、PC9*******************************************************************************/#include"stm32f10x.h"void RCC_Cfg(void);void GPIO_Cfg(void);void TIM_Cfg(void);void NVIC_Cfg(void);void delay_ms(u32 i);void PWM_Cfg(float dutyfactor1,float dutyfactor2,float dutyfactor3,float dutyfactor4);int main(){u8 flag = 1;float ooo=0.5;RCC_Cfg();NVIC_Cfg();GPIO_Cfg();TIM_Cfg();//开启定时器2TIM_Cmd(TIM3,ENABLE);//呼吸灯while(1){PWM_Cfg(ooo,10,50+0.5*ooo,200-2*ooo);if(flag == 1){ooo=ooo+0.002;}if(flag == 0){ooo=ooo-0.002;}if(ooo>100){flag = 0;}if(ooo<0.5){flag = 1;}}}void GPIO_Cfg(void){GPIO_InitTypeDef GPIO_InitStructure;//RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO,ENABLE);//全部映射,将TIM3_CH2映射到PB5//根据STM32中⽂参考⼿册2010中第第119页可知://当没有重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PA6,PA7,PB0,PB1//当部分重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PB4,PB5,PB0,PB1//当完全重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PC6,PC7,PC8,PC9//也即是说,完全重映射之后,四个通道的PWM输出引脚分别为PC6,PC7,PC8,PC9,我们⽤到了通道1和通道2,所以对应引脚为PC6,PC7,PC8,PC9,我们⽤到了通道1和通道2,所以对应引脚为 GPIO_PinRemapConfig(GPIO_FullRemap_TIM3, ENABLE);//部分重映射的参数//GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);//设置PC6、PC7、PC8、PC9为复⽤输出,输出4路PWMGPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9;GPIO_Init(GPIOC,&GPIO_InitStructure);}void TIM_Cfg(void){//定义结构体TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;//重新将Timer设置为缺省值TIM_DeInit(TIM3);//采⽤内部时钟给TIM2提供时钟源TIM_InternalClockConfig(TIM3);//预分频系数为0,即不进⾏预分频,此时TIMER的频率为72MHzre.TIM_Prescaler =0;TIM_TimeBaseStructure.TIM_Prescaler = 0;//设置计数溢出⼤⼩,每计20000个数就产⽣⼀个更新事件TIM_TimeBaseStructure.TIM_Period = 7200 - 1;//设置时钟分割TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//设置计数器模式为向上计数模式TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//将配置应⽤到TIM2中TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStructure);//清除溢出中断标志//TIM_ClearFlag(TIM2, TIM_FLAG_Update);//禁⽌ARR预装载缓冲器//TIM_ARRPreloadConfig(TIM2, DISABLE);//开启TIM2的中断//TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);}/******************************************************************************** 函数名 : PWM波产⽣配置函数* 函数功能 : PWM_Cfg* 输⼊ : dutyfactor 占空⽐数值,⼤⼩从0.014到100* 输出 : ⽆*******************************************************************************/void PWM_Cfg(float dutyfactor1,float dutyfactor2,float dutyfactor3,float dutyfactor4){TIM_OCInitTypeDef TIM_OCInitStructure;//设置缺省值TIM_OCStructInit(&TIM_OCInitStructure);//TIM3的CH1输出TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //设置是PWM模式还是⽐较模式TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //⽐较输出使能,使能PWM输出到端⼝ TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //设置极性是⾼还是低//设置占空⽐,占空⽐=(CCRx/ARR)*100%或(TIM_Pulse/TIM_Period)*100%TIM_OCInitStructure.TIM_Pulse = dutyfactor1 * 7200 / 100;TIM_OC1Init(TIM3, &TIM_OCInitStructure);//TIM3的CH2输出TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //设置是PWM模式还是⽐较模式TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //⽐较输出使能,使能PWM输出到端⼝ TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //设置极性是⾼还是低//设置占空⽐,占空⽐=(CCRx/ARR)*100%或(TIM_Pulse/TIM_Period)*100%TIM_OCInitStructure.TIM_Pulse = dutyfactor2 * 7200 / 100;TIM_OC2Init(TIM3, &TIM_OCInitStructure);//TIM3的CH3输出TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //设置是PWM模式还是⽐较模式TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //⽐较输出使能,使能PWM输出到端⼝ TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //设置极性是⾼还是低//设置占空⽐,占空⽐=(CCRx/ARR)*100%或(TIM_Pulse/TIM_Period)*100%TIM_OCInitStructure.TIM_Pulse = dutyfactor3 * 7200 / 100;TIM_OC3Init(TIM3, &TIM_OCInitStructure);//TIM3的CH4输出TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //设置是PWM模式还是⽐较模式TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //⽐较输出使能,使能PWM输出到端⼝ TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //设置极性是⾼还是低//设置占空⽐,占空⽐=(CCRx/ARR)*100%或(TIM_Pulse/TIM_Period)*100%TIM_OCInitStructure.TIM_Pulse = dutyfactor4 * 7200 / 100;TIM_OC4Init(TIM3, &TIM_OCInitStructure);//使能输出状态TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//设置TIM3的PWM输出为使能TIM_CtrlPWMOutputs(TIM3,ENABLE);}void NVIC_Cfg(void){//定义结构体NVIC_InitTypeDef NVIC_InitStructure;//选择中断分组1NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);//选择TIM2的中断通道NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;//抢占式中断优先级设置为0NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;//响应式中断优先级设置为0NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;//使能中断NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);}void RCC_Cfg(void){//定义错误状态变量ErrorStatus HSEStartUpStatus;//将RCC寄存器重新设置为默认值RCC_DeInit();//打开外部⾼速时钟晶振RCC_HSEConfig(RCC_HSE_ON);//等待外部⾼速时钟晶振⼯作HSEStartUpStatus = RCC_WaitForHSEStartUp();if(HSEStartUpStatus == SUCCESS){//设置AHB时钟(HCLK)为系统时钟RCC_HCLKConfig(RCC_SYSCLK_Div1);//设置⾼速AHB时钟(APB2)为HCLK时钟RCC_PCLK2Config(RCC_HCLK_Div1);//设置低速AHB时钟(APB1)为HCLK的2分频RCC_PCLK1Config(RCC_HCLK_Div2);//设置FLASH代码延时FLASH_SetLatency(FLASH_Latency_2);//使能预取指缓存FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);//设置PLL时钟,为HSE的9倍频 8MHz * 9 = 72MHzRCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);//使能PLLRCC_PLLCmd(ENABLE);//等待PLL准备就绪while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET);//设置PLL为系统时钟源RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);//判断PLL是否是系统时钟while(RCC_GetSYSCLKSource() != 0x08);}//允许TIM2的时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);//允许GPIO的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOC|RCC_APB2Periph_AFIO,ENABLE); }void TIM2_IRQHandler(void){u16 aa=10;if(TIM_GetFlagStatus(TIM2,TIM_IT_Update)!=RESET){//清除TIM2的中断待处理位TIM_ClearITPendingBit(TIM2 , TIM_FLAG_Update);TIM_Cmd(TIM2,DISABLE);//通过循环让灯闪烁while (aa){GPIO_SetBits(GPIOC,GPIO_Pin_3);delay_ms(10);GPIO_ResetBits(GPIOC,GPIO_Pin_3);delay_ms(10);aa--;}//使灯的状态为灭GPIO_SetBits(GPIOC,GPIO_Pin_3);TIM_Cmd(TIM2,ENABLE);}}void delay_ms(u32 i){u32 temp;SysTick->LOAD=9000*i; //设置重装数值, 72MHZ时SysTick->CTRL=0X01; //使能,减到零是⽆动作,采⽤外部时钟源SysTick->VAL=0; //清零计数器do{temp=SysTick->CTRL; //读取当前倒计数值}while((temp&0x01)&&(!(temp&(1<<16)))); //等待时间到达SysTick->CTRL=0; //关闭计数器SysTick->VAL=0; //清空计数器}在产⽣PWM时,如果输出引脚已经被使⽤,就要对引脚进⾏重映射,阅读《STM32中⽂参考⼿册2010》第119页可知:对TIM3⽽⾔:1、当没有重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PA6,PA7,PB0,PB12、当部分重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PB4,PB5,PB0,PB13、当完全重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PC6,PC7,PC8,PC9为了整齐,我们选择完全重映射,使⽤的函数是:GPIO_PinRemapConfig(GPIO_FullRemap_TIM3, ENABLE);如果想使⽤部分映射,参数⽤GPIO_PartialRemap_TIM3:GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);。
基于STM32的PWM输出实验设计

基于STM32的PWM输出实验设计廉佐政;王海珍【摘要】为了提高学生对STM32系列处理器知识的理解和应用能力,设计了PWM输出的可调照明实验.硬件系统的设计采用STM32F103VC的ARM芯片,软件设计采用keil MDK 4.53,结合STM32标准库V3.5编写程序.通过程序调试、运行,给出了实验仿真结果.通过实验操作,学生不仅掌握了PWM的原理及综合应用,也进一步提高了对嵌入式系统课程知识的学习兴趣,得到了良好的教学效果.%In order to improve the students'understanding and application ability of STM32 series processors, a kind of the adjustable illumination experiment based on PWM output is devised.The hardware system is designed with the ARM chip of STM32F103VC,and the software with keil MDK4.53,combining the STM32 standard library V3.5 program.Through the program debugging and running,the experimental simulation results are presented.By the experimental operation,the students not only master PWM principle and its comprehensive application,but also stimulate their interest in learning the Embedded System course,and the good teaching effect is achieved.【期刊名称】《实验技术与管理》【年(卷),期】2017(034)008【总页数】4页(P137-140)【关键词】STM32系列处理器;PWM输出;STM32标准库;嵌入式【作者】廉佐政;王海珍【作者单位】齐齐哈尔大学现代教育技术中心,黑龙江齐齐哈尔 161006;齐齐哈尔大学计算机与控制工程学院,黑龙江齐齐哈尔 161006【正文语种】中文【中图分类】TN761;TP391.9嵌入式技术已经被广泛应用到移动通信、PDA、高清电视、智能家电、汽车、医疗仪器、航天航空、互联网等领域[1-3],嵌入式系统课程在网络工程专业教学中占有举足轻重的地位。
呼吸灯电路原理报告
呼吸灯电路原理报告引言呼吸灯是一种常见的电子元件实验项目,广泛应用于LED灯的控制。
本报告将介绍呼吸灯电路的原理和实现方法。
电路原理呼吸灯电路的核心原理是利用脉宽调制(PWM)技术来控制LED灯的亮度。
通过不断改变LED灯的亮度,可以实现呼吸般的效果。
基本原理呼吸灯电路基于以下两个基本原理:1.脉宽调制(PWM):脉宽调制技术是一种将模拟信号转化为数字信号的方法。
通过改变数字信号的高电平时间(即脉冲宽度),可以控制输出信号的平均值,从而改变LED灯的亮度。
2.电容充放电:利用电容器的充放电特性,可以实现呼吸灯电路的效果。
通过改变电容器的充电时间和放电时间,可以控制LED灯的亮度变化。
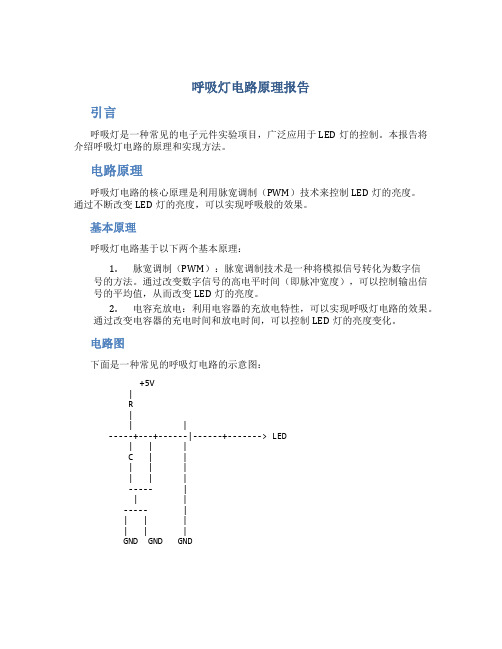
电路图下面是一种常见的呼吸灯电路的示意图:+5V|R|| |-----+---+------|------+-------> LED| | |C | || | || | |----- || |----- || | || | |GND GND GND实现步骤以下是实现呼吸灯电路的步骤:1.连接电路元件:按照电路图连接电路元件。
将电阻(R)连接到+5V电源,将电容器(C)连接到电阻和LED之间,将LED连接到电容器的正极。
2.编程准备:根据硬件平台的要求,选择合适的编程语言和开发环境。
3.初始化引脚:在程序中初始化用于控制LED灯的引脚。
根据电路图,将LED灯所在的引脚设为输出模式。
4.设置脉宽调制:使用合适的脉宽调制函数,设置PWM输出的频率和占空比。
占空比决定了LED灯的亮度。
5.实现呼吸灯效果:在一个循环中,不断改变PWM的占空比,从而实现呼吸灯效果。
可以通过逐渐增大或逐渐减小占空比的方式实现呼吸效果。
6.程序运行:编译和下载程序到硬件平台,运行程序。
LED灯应该开始呼吸般地变亮和变暗。
结论通过脉宽调制技术和电容充放电原理,我们可以实现呼吸灯电路。
这种电路可以控制LED灯的亮度,使其呼吸般地变亮和变暗。
呼吸灯电路广泛应用于LED灯的控制,是一个简单而有趣的电子元件实验项目。
STM32f103PWM(用于电调)程序

GPIOA->CRL&=0XFFFFF0FF;//PA2清除之前的设置
GPIOA->CRL|=0X00000B00;//复用功能输出
GPIOA->CRL&=0XFFFF0FFF;//PA3清除之前的设置
GPIOA->CRL|=0X0000B000;//复用功能输出
#include "timer.h"
#include "led.h"
//定时器3中断服务程序
void TIM3_IRQHandler(void)
{
if(TIM3->SR&0X0001)//溢出中断
{
//LED1=!LED1;
}
TIM3->SR&=~(1<<0);//清除中断标志位
}
//通用定时器中断初始化
}
#ifndef __TIMER_H
#define __TIMER_H
#include "sys.h"
/********************************************************************************
本程序中共预设了八个通道的PWM输出,使用高级定时器1和通用定时器2
//后两位00表示输入状态;此时前两位00模拟输入;01浮空输入;10上拉/下拉输入;11保留
//后两位01/10/11分别表示10/20/50MHz的输出速度;此时前两位00通用推完输出;01通用开漏输出;10复用推挽;11复用开漏
GPIOA->CRL&=0XFFFFFF0F;//PA1清除之前的设置
STM32流水灯+呼吸灯+小车循迹
DelayUs(100);
GPIO_Write(GPIOD,0x5500);//0101 0101 0000 0000 8-15
GPIO_Write(GPIOB,0x03C0);//0000 0011 1100 0000 6-9
while(1)
{
switch(GPIO_ReadInputData(GPIOE)&0x00F0)
{
LED_Config();
while(1)
{
uint8_t i=0;
for(i=0;i<4;i++)
{
GPIO_Write(GPIOB,~LED_Table[i]);
DelayMs(1000);
}
}
}
void LED_Config(void )
{
GPIO_InitTypeDef GPIO_InitStruct;
*资源:TIM4、EXTI0、EXTI1
*电机:PB6-PB9管脚接电机使能端,PD8-PD15管脚控制电机正反转
*描述:使用两级中断进行嵌套,KEY1先占优先级为1,KEY先占优先级为0
上电即运行流水灯程序,按下KEY1运行呼吸灯程序,按下KEY2运行小车循迹程序
*************************************************/
}
void EXTI_Config(void)
{
EXTI_InitTypeDef EXTI_InitStruct;
EXTI_InitStruct.EXTI_Line = EXTI_Line0|EXTI_Line1;
EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt;
PWM原理及应用 呼吸灯
PWM原理及应用呼吸灯1. 引言在电子设备和嵌入式系统中,PWM(Pulse Width Modulation,脉宽调制)广泛应用于控制和调节信号。
它通过改变脉冲信号的脉宽来控制输出信号的平均电压值,从而实现对各种设备的精确控制。
其中一种常见的应用就是呼吸灯,它能够模拟人类的呼吸过程,给人一种柔和而温馨的感觉。
本文将介绍PWM的原理以及其在呼吸灯中的应用。
2. PWM原理PWM的原理是通过控制脉冲信号的占空比(即高电平和低电平的时间比)来控制输出信号的电压值。
一般来说,PWM信号的周期是固定的,而占空比可以任意调节。
通过改变占空比,可以实现输出信号的精确控制。
以呼吸灯为例,当占空比较大时,LED灯会亮起,而当占空比较小时,LED灯会变暗甚至熄灭。
通过不断改变占空比,PWM信号可以模拟出呼吸的效果。
3. 呼吸灯的实现在实际应用中,呼吸灯一般由以下几个步骤实现:3.1 初始化设置首先,需要将LED引脚配置为输出模式,并设置一个初始的占空比。
一般来说,初始占空比可以设置为较小的值,例如10%。
3.2 运行循环接下来,进入一个无限循环中。
在每次循环中,需要逐步增加或减小占空比,以实现呼吸灯的效果。
可以通过改变占空比的增量和时间间隔来调节呼吸的速度和幅度。
3.3 边界检测在改变占空比之前,需要检测当前的占空比是否已经接近边界。
如果已经接近边界,则需要改变增量的符号,以使占空比继续增加或减小。
3.4 更新LED状态在每次循环结束时,需要根据当前的占空比来更新LED的状态。
当占空比较大时,LED应该亮起;当占空比较小时,LED应该变暗或熄灭。
3.5 延时为了控制呼吸的速度,可以在每次循环结束时添加一个适当的延时。
延时的时间可以根据实际需求进行调整。
4. 示例代码以下是一个使用Arduino开发板实现呼吸灯效果的示例代码:const int ledPin = 9;int currentBrightness = 0;int brightnessIncrement = 5;void setup() {pinMode(ledPin, OUTPUT);}void loop() {currentBrightness += brightnessIncrement;if (currentBrightness >= 255 || currentBrightness <= 0) {brightnessIncrement = -brightnessIncrement;}analogWrite(ledPin, currentBrightness);delay(20);}5. 总结PWM是一种广泛应用于电子设备和嵌入式系统中的技术,它通过改变脉冲信号的占空比来控制输出信号的电压值。
呼吸灯闪烁灯的单片机解决方案

呼吸灯闪烁灯的单片机解决方案
驱动LED可以采用拉电流的方式也可以采用灌电流的方式,要想使LED闪烁,需要用PWM来控制LED。
PWM的产生方式有多种,比如纯硬件的NE555方案,让555工作在多谐振荡器状态即可产生PWM,并且频率可以通过RC电路来调节。
但是这种方案的时间精度取决于RC电路,精度不高,如果对精度要求较高的话可以采用单片机产生PWM来驱动。
如果LED的功率不大的话,可以直接用单片机的GPIO口来驱动,以灌电流的方式,如下图所示。
单片机的GPIO口输出PWM,为高电平的时候LED熄灭,为低电平的时候LED被点亮。
如果LED的功率比较大,可以采用三极管来驱动,电路如下图所示。
单片机控制三极管的基极,当单片机输出高电平的时候三极管导通,LED被点亮;当单片机输出低电平的时候三极管截止,LED熄灭。
那么该如何控制PWM的参数呢?PWM非常有用,可以用来控制LED 的亮暗渐变实现呼吸灯的效果,比如要求10s闪烁,以10s亮10s灭为例,那PWM的周期就是10s,占空比50%,如下图所示。
即单片机输出高电平10s,再输出10s低电平,翻转周期为10s,PWM的周期为20s。
可以通过单片机的定时器来实现GPIO口的翻转,这涉及到单片机的编程。
STM32F103PWM输出实验(HAL库)

STM32F103PWM输出实验(HAL库)1、芯⽚输出PWM波形打码步骤 1.0主函数int main(void){HAL_Init(); //初始化HAL库Stm32_Clock_Init(RCC_PLL_MUL9); //设置时钟,72Mdelay_init(72); //初始化延时函数uart_init(115200); //初始化串⼝LED_Init(); //初始化LEDTIM1_PWM_Init(20000,72); //72分频,即1M 。
1000000/20000 = 50 Hz ,即20mswhile(1){TIM_SetTIM1Compare1(1500);}} 1.1初始化输出PWM波形的定时器和IO⼝(例程使⽤定时器1的通道1,输出在PA8)GPIO_InitTypeDef GPIO_Initure;__HAL_RCC_TIM1_CLK_ENABLE(); //使能定时器1__HAL_RCC_GPIOA_CLK_ENABLE(); //开启GPIOA时钟GPIO_Initure.Pin=GPIO_PIN_8; //PA8GPIO_Initure.Mode=GPIO_MODE_AF_PP; //复⽤推挽输出GPIO_Initure.Pull=GPIO_PULLUP; //上拉GPIO_Initure.Speed=GPIO_SPEED_HIGH; //⾼速HAL_GPIO_Init(GPIOA,&GPIO_Initure); 1.2初始化定时器1,HAL库中,使⽤定时器的 PWM 输出功能时, HAL 库为我们提供了⼀个独⽴的定时器初始化函数 HAL_TIM_PWM_Init ()TIM_HandleTypeDef TIM1_Handler; //定时器句柄TIM1_Handler.Instance=TIM1; //定时器1TIM1_Handler.Init.Prescaler=psc; //定时器分频TIM1_Handler.Init.CounterMode=TIM_COUNTERMODE_UP;//向上计数模式TIM1_Handler.Init.Period=arr; //⾃动重装载值TIM1_Handler.Init.ClockDivision=TIM_CLOCKDIVISION_DIV1;HAL_TIM_PWM_Init(&TIM1_Handler); //初始化PWM 1.3初始化通道并开启PWMTIM_OC_InitTypeDef TIM1_CH1Handler; //定时器1通道1句柄TIM1_CH1Handler.OCMode=TIM_OCMODE_PWM1; //模式选择PWM1TIM1_CH1Handler.Pulse=arr/2; //设置⽐较值,此值⽤来确定占空⽐,默认⽐较值为⾃动重装载值的⼀半,即占空⽐为50%TIM1_CH1Handler.OCPolarity=TIM_OCPOLARITY_HIGH; //输出⽐较极性为⾼HAL_TIM_PWM_ConfigChannel(&TIM1_Handler,&TIM1_CH1Handler,TIM_CHANNEL_1);//配置TIM1通道1HAL_TIM_PWM_Start(&TIM1_Handler,TIM_CHANNEL_1);//开启PWM通道1 1.4提供设置⽐较值的函数//设置TIM1通道1的占空⽐//compare:⽐较值void TIM_SetTIM1Compare1(u32 compare){TIM1->CCR1=compare;}2、输出PWM原理及代码解释 设置PWM周期和⼀个⽐较值,技术过程中⽐较值和计数值进⾏⽐较,判断输出有效电平还是⽆效电平,达到输出PWM波的⽬的。
STM32基本外设应用-任务3按键控制呼吸灯

2.4 任务3 按键控制呼吸灯应用开发2.4.1 任务要求本任务要求设计一个可通过按键进行控制的呼吸灯系统,具体要求如下:●使用外部中断实现按键功能;●LED灯的显示效果为“逐渐变亮”然后“逐渐变暗”;●系统刚上电时,LED灯为关闭状态。
第奇数次按下按键,LED灯显示呼吸灯效果;第偶数次按下按键,LED灯关闭,并以此循环往复。
按键与呼吸灯的电路原理图如图2- 1所示,其中按键的GPIO引脚为PC13,呼吸灯LED与GPIO引脚PB8相连。
图2- 1 按键与呼吸灯的电路原理图2.4.3 任务实施1. 建立STM32CubeMX工程并生成初始C代码(1)建立工程存放的文件夹在“STM32_WorkSpace”文件夹下新建文件夹“task3_Key_PWM_LED”用于保存本任务工程。
(2)新建STM32CubeMX工程参考2.2节相关内容。
(3)选择MCU型号参考2.2节相关内容,选择型号为STM32F103VE的微控制器。
(4)配置调试端口参考2.2节相关内容,将“PA13”引脚配置为SWDIO功能,“PA14”引脚配置为SWCLK功能。
(5)配置MCU时钟树参考2.2节相关内容,将HCLK配置为72MHz,PCLK1配置为36MHz,PCLK2配置为72MHz。
(6)配置外部中断按键GPIO功能在STM32CubeMX工具的配置主界面,用鼠标左键点击MCU的“PC13”引脚,选择功能“GPIO_EXTI13”,如图2- 2标号⑤所示。
图2- 2 按键外部中断的配置对图2- 2中其他标号的配置说明如下:标号①:展开“Pinout & Configuration”标签页左侧的“System Core”选项,选择“GPIO_EXTI13”选项。
标号②:GPIO模式配置为“External Interrupt Mode with Falling edge trigger detection(检测下降沿的外部中断模式)”;标号③:GPIO上拉下拉功能配置为“Pull-up(上拉)”;标号④:GPIO用户标签配置为“KEY1”;配置其为触发外部中断,这个中断设置可以在两个地方进行设置,比如这里在GPIO中进行设置:也可以在左侧的NVIC中进行设置,NVIC是中断向量嵌套管理器,可以管理所有中断,并且设置优先级。
STM32定时器中断使LED灯闪烁
void DebugMonitor(void);
void SVCHandler(void);
void PendSVC(void);
void SysTickHandler(void);
void WWDG_IRQHandler(void);
void PVD_IRQHandler(void);
int main()
{
SystemInit();
RCC_Configuration();
GPIO_Configuration();
TIM3_Configuration();
NVIC_Configuration();
while(1);
}
void RCC_Configuration(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
#ifndef __STM32F10x_IT_H
#define __STM32F10x_IT_H
void NMIException(void);
void HardFaultException(void);
void MemManageException(void);
void BusFaultException(void);
void I2C2_ER_IRQHandler(void);
void SPI1_IRQHandler(void);
void SPI2_IRQHandler(void);
void USART1_IRQHandler(void);
void USART2_IRQHandler(void);
STMSF通过PWM波实现三基色呼吸灯

STMSF通过PWM波实现三基色呼吸灯PWM(Pulse Width Modulation)是一种调制信号的技术,用于对模拟信号进行数字化处理。
通过改变信号的占空比,可以控制信号的平均功率,达到模拟信号的效果。
三基色呼吸灯是一种常见的LED灯效,通过控制红、绿、蓝三种颜色的灯珠的亮度变化,实现颜色的渐变效果。
下面将介绍如何使用STMSF通过PWM波实现三基色呼吸灯。
步骤一:硬件准备首先,准备一个STMSF开发板和三种不同颜色的LED灯珠(红色、绿色和蓝色)。
连接红色LED灯珠到STMSF的一个PWM输出引脚,绿色LED 灯珠到另一个PWM输出引脚,蓝色LED灯珠到第三个PWM输出引脚。
步骤二:软件编程接下来,需要编写软件程序来控制PWM输出引脚的亮度变化。
使用STMSF的开发环境,打开一个新的工程。
首先,需要初始化PWM输出引脚。
根据具体开发环境的API接口,调用相应的函数来初始化PWM输出引脚。
然后,编写一个循环程序,用于实现呼吸灯效果。
在循环中,需要调整PWM输出引脚的占空比,从而改变LED灯珠的亮度。
首先,将占空比从0逐渐增加,从而让LED灯珠逐渐亮起。
当占空比达到最大值时,再逐渐减小占空比,让LED灯珠逐渐变暗。
为了实现呼吸灯效果,可以通过设定一个时间间隔,在每次循环中逐渐增加或减小占空比的值。
这样在较短的时间内,LED灯珠的亮度就可以呈现出呼吸灯效果。
步骤三:调试与测试可以通过调整程序中的时间间隔,和占空比的最大值、最小值来改变呼吸灯效果的速度和幅度。
最后,进行测试和调试,确保呼吸灯效果正常工作。
总结:通过PWM波实现三基色呼吸灯的原理很简单,即改变PWM信号的占空比,从而改变LED灯珠的亮度。
具体实现的步骤包括硬件的连接和软件的编程,通过调试和测试来确保呼吸灯效果的正常工作。
这种技术可以应用于各种LED灯效的设计中,给人们带来更多的视觉享受。
利用PWM脉宽调制实现呼吸灯
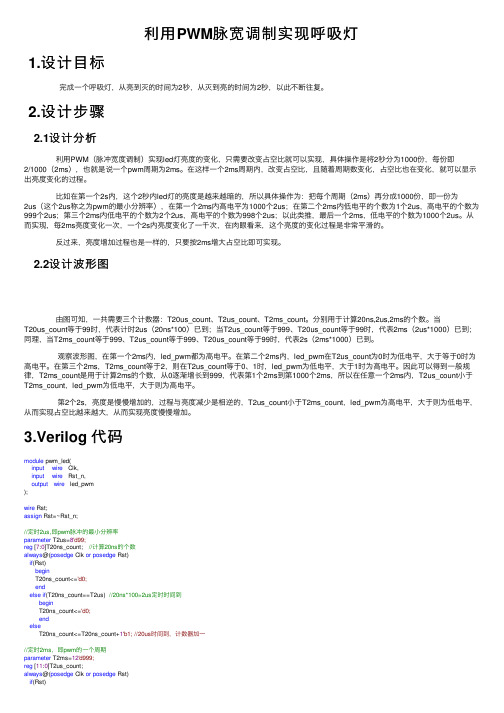
利⽤PWM脉宽调制实现呼吸灯1.设计⽬标完成⼀个呼吸灯,从亮到灭的时间为2秒,从灭到亮的时间为2秒,以此不断往复。
2.设计步骤2.1设计分析利⽤PWM(脉冲宽度调制)实现led灯亮度的变化,只需要改变占空⽐就可以实现,具体操作是将2秒分为1000份,每份即2/1000(2ms),也就是说⼀个pwm周期为2ms。
在这样⼀个2ms周期内,改变占空⽐,且随着周期数变化,占空⽐也在变化,就可以显⽰出亮度变化的过程。
⽐如在第⼀个2s内,这个2秒内led灯的亮度是越来越暗的,所以具体操作为:把每个周期(2ms)再分成1000份,即⼀份为2us(这个2us称之为pwm的最⼩分辨率),在第⼀个2ms内⾼电平为1000个2us;在第⼆个2ms内低电平的个数为1个2us,⾼电平的个数为999个2us;第三个2ms内低电平的个数为2个2us,⾼电平的个数为998个2us;以此类推,最后⼀个2ms,低电平的个数为1000个2us。
从⽽实现,每2ms亮度变化⼀次,⼀个2s内亮度变化了⼀千次,在⾁眼看来,这个亮度的变化过程是⾮常平滑的。
反过来,亮度增加过程也是⼀样的,只要按2ms增⼤占空⽐即可实现。
2.2设计波形图由图可知,⼀共需要三个计数器:T20us_count、T2us_count、T2ms_count。
分别⽤于计算20ns,2us,2ms的个数。
当T20us_count等于99时,代表计时2us(20ns*100)已到;当T2us_count等于999、T20us_count等于99时,代表2ms(2us*1000)已到;同理,当T2ms_count等于999、T2us_count等于999、T20us_count等于99时,代表2s(2ms*1000)已到。
观察波形图,在第⼀个2ms内,led_pwm都为⾼电平。
在第⼆个2ms内,led_pwm在T2us_count为0时为低电平,⼤于等于0时为⾼电平。
在第三个2ms,T2ms_count等于2,则在T2us_count等于0、1时,led_pwm为低电平,⼤于1时为⾼电平。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
STM32f103 定时器输出PWM波控制LED输出呼吸灯
(根据正点原子程序)
定时器部分:time.c 与time.h
Time.h函数
#ifndef __TIME_H
#define __TIME_H
void TIME_PWM_Init(u16 arr,u16 psc);
#endif
Time.c 函数
#include "time.h"
// 定时器输出PWM波,控制LED(PD12),重映射到TIME4_CHI
//******************************************************//
void TIME_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE); //
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD|RCC_APB2Periph_AFIO,ENABLE);// GPIO_PinRemapConfig(GPIO_Remap_TIM4,ENABLE); //重映射TIM4使能
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOD,&GPIO_InitStructure); // 初始化GPIO口为复用推完输出
// 初始化TIM4
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;//向上计数
TIM_TimeBaseInitStructure.TIM_Period=arr; //
TIM_TimeBaseInitStructure.TIM_Prescaler=psc;//预分频系数
TIM_TimeBaseInitStructure.TIM_ClockDivision = 0;
TIM_TimeBaseInit(TIM4,&TIM_TimeBaseInitStructure);
// 初始化TIM4_CHI—pwm模式
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;// 极性选择
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;//
TIM_OC1Init(TIM4,&TIM_OCInitStructure); //
TIM_OC1PreloadConfig(TIM4,TIM_OCPreload_Enable); // 使能TIM4在ccr1上的预装载寄存器
TIM_Cmd(TIM4,ENABLE); //使能TIM4
}
Main函数
#include "stm32f10x.h"
#include "led.h"
#include "delay.h"
#include "time.h"
int main(void)
{
u16 led0pwmval=0;
u8 dir=1;
delay_init();
TIME_PWM_Init(899,0); // 不分频产生一个pwm频率为72MHz/900=80KHz
while(1)
{
delay_ms(1);
if(dir) led0pwmval++;
else led0pwmval--;
if(led0pwmval>600) dir=0;
if(led0pwmval==0) dir=1;
TIM4->CCR1=led0pwmval;
}
}
(注:专业文档是经验性极强的领域,无法思考和涵盖全面,素材和资料部分来自网络,供参考。
可复制、编制,期待你的好评与关注)。