SS4改型电力机车主电路
SS4改电力机车 保护电路
保护电路SS4改电力机车主电路保护包括:短路、过流、过电压及主接地保护等四个方面。
1.6.1 短路保护当网侧出现短路时,通过网侧电流互感器7TA→原边过流继电器101KC,使主断路器4QF动作,实现保护。
其整定值为320A。
当次边出现短路时,经次边电流互感器176TA、177TA、186TA及187TA→电子柜过流保护环节使主断路器4QF动作,实现保护。
其整定值为3000A+5%。
在整流器的每一晶闸管上各串联一个快速熔断器,实现元件击穿短路保护之用。
1.6.2 过流保护在牵引工况和制动工况时牵引电机的状况不同,牵引电机过流保护的整定值和保护方式设置也不同。
在牵引工况时,牵引电机的过流保护是通过直流电流传感器111SC、112SC、131SC和141SC→电子柜→主断路器来实现的,其整定值为1300A+5%。
在制动工况时,牵引电机的过流保护是通过直流电流传感器111SC、112SC、131SC和141SC→电子柜→励磁过流中间继电器559KA→励磁接触器91KM来实现的。
其整定值为1000A±5%。
在制动工况时,还没有励磁绕组的过流保护,它是通过直流电流传感器199SC→电子柜→励磁过流中间继电器559KA→励磁接触器91KM来实现的。
其整定值为1150±5%。
1.6.3 过电压保护机车的过电压包括:大气过电压、操作过电压、整流器换向过电压原边过流继电器和调整过电压等。
大气过电压的保护主要采用两种方式:一是在网侧设置新型金属氧化物避雷器5F;二是在各主变压器的各次边绕组上设置RC吸收器。
牵引绕组上的RC吸收器由71C与73R、72C与74R、81C与83R、82C与84R构成;励磁绕组上的RC吸收器由93C与94R构成;辅助绕组上的RC吸收器由255C与260R构成。
当机车主断路器4QF打开或接通主变压器空载电流时,机车将产生操作过电压,通过网侧避雷器5F和牵引绕组上的RC吸收器能够对此操作过电压进行限制。
电力机车控制复习题及参考答案

《电力机车控制》课程复习资料一、判断题:1.机车牵引力与机车速度的关系,称为机车的牵引特性。
[ ]2.为保持整流电流的脉动系数不变,要求平波电抗阻器的电感为常数。
[ ]3.机车的速度特性是指机车牵引力与运行速度的关系。
[ ]4.机车的起动必须采用适当的起动方法来限制起动电流和起动牵引力。
[ ]5.SS4改型机车Ⅲ级磁场削弱时,15R和16R同时投入,磁场削弱系数为0.3。
[ ]6.SS4改型机车主电路接地保护采用接地继电器,这是一套无源保护系统。
[ ]7.机械联锁可以避免司机误操作。
[ ]8.控制电路是为主电路服务的各种辅助电气设备和辅助电源连成的一个电系统。
[ ]9.交流电机同直流电机相比,维修量可以减小。
[ ]10.直流传动是我国电力机车传动的主要方式。
[ ]11.零压保护电路同时起到高压室门联锁阀的交流保护作用。
[ ]12.机车故障保护的执行方式有跳主断路器、跳相关的接触器、点亮故障信号显示。
[ ]13.交直交传动系统的功率/体积比小。
[ ]14.当司机将牵引通风机按键开关合上后,不但能使通风机分别起动,还能使变压器风机和油泵起动。
[ ]15.逆变器用于将三相交流电变为直流电。
[ ]16.交直交系统具有主电路复杂的特点。
[ ]17.压缩机的控制需要根据总风压的变化由司机操作不断起动。
[ ]18.整流电路的作用是将交流电转换为直流电。
[ ]二、单项选择题:1.机车安全运行速度必须小于机车走行部的( )或线路的限制速度。
[ ]A.旅行速度B.构造速度C.持续速度2.制动电阻柜属于( )电路的电器设备。
[ ]A.主B.辅助C.控制3.SS4改型电力机车固定磁场削弱系数β为 [ ]A.0.90B.0.96C.0.984.SS4改型机车控制电路由110V直流稳压电源、( )以及有关的主令电器各种功能的低压电器及开关等组成。
[ ]A.硅整流装置B.电路保护装置C.蓄电池组5.SS4 改型电力机车采用的电气制动方法为 [ ]A.再生制动B.电磁制动C.加馈电阻抽制动6.SS4改型电力机车主电路有短路、过流、过电压及( )等四个方面的保护。
电力机车控制-SS4改电力机车牵引电路分析

4.牵引电机故障隔离开关
牵引电机故障隔离开关19QS~49QS均为单刀双投开关,有上、 中、下三个位置。
“上”:运行位, “中”:牵引工况故障位, “下”:制动工况故障位。
机车牵引工况,若1M电机或相应的牵引通风机故障时,将19QS 置中间位,其相应常开联锁触点打开线路接触器12KM,使1M电机支 路与供电电路完全隔离,不投入工作。
3
牵引电机接线
为了均衡轴重,减小轴重转移,同一转向架上的两台牵引电机背 向布置,故其相对旋转方向应相反。以第一转向架前进方向为例,从 1M电机非整流子侧看去,电枢旋转方向应为顺时针方向;从2M电机 非整流子侧看去应为逆时针旋向。同样,第二转向架3M电机为顺时 针方向,4M电机为逆时针方向。由此,各牵引电机电枢与主极绕组 的相对接线方式是:
图1 SS4改机车牵引电路
3
牵引电路构成
SS4改机车每一节车有四台牵引电机,每一牵引电机支路的电 流路径基本相同,以1M电机为例分析电流路径:
正极母线71→平波电抗器11L→线路接触器12KM→电流传感器 111SC→电机电枢A11-A12→位置转换开关的“牵-制”鼓107QPR1 (牵引位)→位置转换开关的“前-后”鼓107QPV1(前位)→主极 磁场绕组D11-D12→位置转换开关的“前-后”鼓107QPV1(前位) →1M牵引电机隔离开关19QS→位置转换开关的“牵-制”鼓107QPR1 (牵引位)→负极母线72。
2
牵引电路构成
SS4改机车由完全相同的两节车重联后组成一台车,其功率为 6400kW,是干线主型货运机车。
SS4G电力机车主电路按其功能及电压等级分为:网侧高压电路、 整流调压电路、牵引电路、制动电路、功率因数补偿电路和保护电 路六部分。本讲主要分析牵引电路。
T1_SS4改进型E方案电力机车电气线路说明书

1 主电路g) 为提高机车功率因数和改善通讯干扰,机车增加了PFC装臵。
1.1 网侧高压电路(25kV)见主电路原理图横坐标101、102和103部分,主要设备有受电弓1AP、真空断路器4QF、高压电压互感器6TV、高压电流互感器7TA,避雷器5F,主变压8TM的高压绕组AX,PFC用电流互感器109TA,高压隔离开关3QS 以及二节车之间的25kV母线采用高压连接器2AP连接。
低压部分有自动开关102QA、网压表103PV、电度表105PJ、PFC用电压互感器100TV,以及接地电刷110E、120E、130E和140E。
网侧电流从接触网流入升起的受电弓,经25kV车顶母线,分两路,一路为本节车,经主断路器4QF,主变压器AX绕组→车体→车体与转向架间软线→轴箱电刷→车轮→钢轨,另一路经高压隔离开关3QS和高压连接器2AP到另一节车的车顶母线。
网侧高压电路中的低压电路主要用于检测机车网压和提供电度表用的电压信号。
SS4改型机车网侧高压电路,与以往的机车相比,具有如下特点:a) 在25kV网侧电路中,加设了避雷器5F,以取代以往的放电间隙,作过电压和雷击保护;b) 加设了网侧高压互感器(25kV/100V),为便于司机在司机室内掌握受电弓的升降状况,该互感器设臵在受电弓电路后,主断路器之前;c) 加设有PFC控制用电压、电流互感器;d) 为提高机车的可靠性,在部件选型上采用了真空主断路器。
DSA200受电弓;e) 加设了高压隔离开关3QS,便于机车在受电弓或主断路器故障时的隔离运行。
开放,触发T1和T2,绕组a1b1投入。
电源处于正半周时,电流路径为a2→D3→71号导线→平波电抗器→电机→72号导线→T2→b1→a1→D1→T6→X2→a2,当电源处于负半周时,电流路径为X2→T5→71号导线→平波电抗器→电机→72号导线→D2→a1→b1→T1→D4→a2→x2。
此时,T1、T2、D1和D2顺序移相,整流电压在1/2Ud~3/4Ud之间调节。
电力机车控制-SS4改电力机车主断路器控制

4
主断保护分闸
3.牵引电机过流 由电流传感器111SC~ 142SC检测牵引电机的电流信 号,然后送入电子柜,由电子 柜来判断出牵引电机是否过流 及哪一台过流。若一旦判断某 台电机过流,则电子柜送出+ 110V的电压信号,这一信号直 接作用于牵引电机过流中间继 电器557KA,使其得电动作, 主断路器分断。
主断路器控制
1
主断路器作用和分类
2
主断合闸控制
3
主断分闸控制
4
主断保护控制
1
主断路器作用和分类
一、主断路器作用 主断路器是电力机车的一个重要电气部件,它是整车与接触网 之间电气连通、分断的总开关,是机车上最重要的保护设备,当 机车发生各种严重故障时都通过它来自动切断机车电源,从而保 护机车。
二、主断路器分类
图3主断路器控制
3 主断分闸控制
图1 主断路器控制
①人工分断 主断路器的分闸控制由自动开
关630QA提供电源,当按下“主 断路器分”按键开关400SK时, 导线556经400SK、4QF常开联锁 (此时已闭合),使导线542有电, 主断路器分闸线圈4QFF得电动作, 主断路器分闸。
②故障自动分断 主断路器除具有人工分断功能
图2 主断路器保护控制
4
主断保护分闸
2.次边过流 由电流互感器176TA、 177TA、186TA、187TA检测 次边过流信号,然后送到电子 柜,当电子柜判断出次边过流 时,送出110V的电压信号,这 一信号直接作用于565KA,使 565KA得电动作并自持,最后 使主断路器分断。
图2 主断路器保护控制
图2 主断路器保护控制
谢 谢!
3 主断合闸控制
图1主断路器控制
2.合闸操作 按下“主断合”自复按键 开关401SK后,导线531经 401SK、586QS、568KA、 539KT、 使导线541有电,若 此时主断路器的风缸风压足够 (大于450kPa)4KF动作,则 主断路器的合闸线圈4QFN得 电,主断路器的动作机构在压 缩空气推力的作用下,合上主、 辅触头,从而完成主断路器的 合闸操作。
SS4改型电力机车主电路
查阅资料,画出ss4机车主电路原理图,简述其基本特点,如:调压方式、整流方式、供电方式、制动方式等一、SS4改型电力机车主电路的特点:1. 传动方式为交—直传动,串励脉流牵引电动机牵引;2. 转向架供电为独立供电方式;3. 不等分三段半控整流调压电路,有级磁场削弱;4. 加馈电阻制动,最大制动力延伸至11.5 km/h;5. 直流电流、电压测量传感器化;6. 双接地继电保护;7. 增设PFC功补装置。
二、主电路构成(一)网侧高压电路(25KV电路)主要设备:1.高压部分有受电弓1AP、高压连接器2AP、空气断路器4QF、避雷器5F、高压电压互感器6TV、高压电流互感器7TA、主变压器8TM原边绕组。
2.低压部分有自动开关102QA、网压表103PV、PFC用电压互感器100TV、PFC用电流互感器109TA、电度表105PJ,以及接地回流电刷110E、120E、130E、140E。
:3.电流回路:高压连接器2AP→另一节车的车顶母线主断路器4QF→高压电流互感器7TA→主变压器原边绕组A—X →PFC用电流互感器109TA→低压电流互感器9TA→车体→转向架构架→接地回流电刷(二)整流调压电路(Ⅰ架)采用转向架独立供电:a1-b1-x1,a2-x2供电给整流器70V ,70V 给并联的第1、2位牵引电机供电;a3-b3-x3,a4-x4供电给整流器80V ,80V 给并联的第3、4位牵引电机供电。
额定网压时:2211111133332222695.4a x a x a b b x a b b x U U U U U U V ======不等分三段半控桥式整流电路工作顺序(Ⅰ架为例):首先投入4臂桥,触发T5和T6,投入a2-x2段绕组,T5和T6顺序移相。
整流输出电压0~12d U 变化,D1和D2续流。
正半周:a2(正)→D3→71号母线→平波电抗器→牵引电机线路接触器→牵引电机→牵引电机故障隔离开关→72号母线→D2→D1→73号母线→T6→x2(负)。
SS4改电力机车控制电路分析
蓄电池组是由 74 个单节串联组成,每个单节电压为 1.25V ,蓄电池组的标称 电压为 92.5V,容量为 100Ah。
二、DC110V电源柜:
671L
a6 204
600QA 670TC
201
210 1 3
(二)、在升弓的情况下,由DC110V电源柜与蓄电池并联向 机车控制电路提供DC110V控制电源,此时蓄电池相当于一个 数千微法的电容,在电路上起滤波的作用。
此时导线 464 有 DC110V的电压,若闭合所有的自动开关,蓄电池可向控 制电路提供DC110V控制电源。
四、DC110V电源输出回路中整流管V5的作用:
在线号前面冠以 “ W ”(外)字头的线号,为两台机车或多台
机车之间的重联线,称为外重联线。
外重联线的表示方式及联结原则:
(1)、在同一线号下带a的导线与带b的导线相连接
(2)、不经过重联中间继电器(545KA、546KA、547KA、548KA)
控制的导线,同名线号相连接。
例如:1号车导线400 —— W400
控制电源
SS4 改型电力机车上的控制电源是由 DC110V 电源柜及蓄电池 组构成。
1、在通常运行情况下,两者并联给机车提供稳定的 DC110V电源; 2、在降弓的情况下,蓄电池供机车作低压实验和照明用电; 3、在运行中电源柜故障的情况下,蓄电池作维持机车故障运行的控制电源。
一、蓄电池:在图册用符号 GB 表示
B节车N533b相连接
(2)、同一线号不带a、b的导线,相同线号相连接。
例如:A节车N536
B节车N536相连接。
(3)、通过重联电缆后的特殊连接
SS4改型电力机车控制电路—显示电路

两节机车重联: 利用重联电缆同步显示。 例如预备信号灯:N703a失电A节车预备 信号灯熄灭,B节机车预备也同时熄灭,同 步显示。
但应注意,他表明A节车预备完成,不 能说明B节车预备也同时完成。
二、主屏显示电路
1. “前节车”信号灯:前节车即操作端所在的 一节车,绿色长亮。 2.“预备”:由556KA控制。预备未完成前灯 亮,“预备”灯熄灭,表示机车预备完成。 3.“电子柜预备”:电子柜电源板工作正常时 ,导线1719号线失电,“电子柜预备”信号 灯灭,表示该柜可以开始工作。 4.“主断”:合闸后信号灯熄灭,反之就亮。
5.“欠压”:灯亮表示机车处于零压或欠压状态。 6.“原边过流”:该灯亮表示原边过流。 7.“主接地”:当97KE或者98KE动作后该灯亮,同 时辅屏“主接地1”或“主接地2”灯亮。例如:97KE 动作后,辅屏790·97KE·701·主接地1·500。 主屏701·二极管·707·主接地·500。 8.“牵引电机”:该信号灯亮表示牵引电机过流。
9.“零位”:该信号灯亮表示调速手轮在零位。 10.“励磁过流”:该信号灯亮表示电制动励磁过流。 11.“空转”:空转是指同一转向架上两电机电流差达 30%以上。该信号灯亮表示机车发生了空转,电路为: AE·1717·空转·500。 12.“劈相机”:正常启动时信号灯先亮一下接着就灭 ,时间间隔约2秒。劈相机常亮时,说明劈相机不正常 ,问题在启动。 13.“功补过流”:灯亮表示功补过流,微机发出功补 过流信号。
一、信号显示10V 690线和 DC15V 790线;
2.AB两节机车由完全相同的 16个信号灯组成,无论司机 在哪端司机室操作机车均能 看见全车的显示;
3.主屏反映的是机车主要故障和工作状态;辅屏是主屏的补充说明,同时也显示辅 助机组工作状态; 4.412SK为检查按键,闭合之后,信号灯都亮,否则显示屏有故障。
SS4改型电力机车电气线路运用分析

SS4改型电力机车电气线路分析运用学生姓名:学号:专业班级:指导教师:摘要随着我国电气化铁路及电力机车技术的迅速发展,电力机车在产品的结构、形式、质量方面都有了很大的的改进和提高,专业的对口,作为司乘人员,在铁路机务部门工作,必须熟悉和掌握电力机车控制电路的基本作用原理,和通过系统的分析与设计来提高自己的专业素质。
韶山4G型电力机车电气线路的设计与分析是选自机车运用的实际课题,涉及范围较广。
电力机车的控制线路是一个复杂的系统。
本课题要求学生在已学的机车线路基础上,整体分析SS4G型电力机车主电路,辅助电路和控制电路,并能了解电力机车的故障判断处理流程和方法。
尝试根据实际情况对控制电路进行设计。
使学生更好的理解电力机车的工作控制原理,培养学生运用所学的基础知识、专业知识,并利用其中的基本理论和技能来分析解决本专业内的相应问题,使学生建立正确的设计思想,掌握工程设计的一般程序和方法,完成电气工程技术人员必须具备的基本能力的培养和训练通过对此课题的学习和设计,使学生能更好的理解电力机车电气原理及故障处理方法,掌握电力机车实际运用中的基本专业技能。
培养学生运用所学的基础知识和专业知识的能力,提高学生利用所学基本理论和自身具备的技能来综合分析解决本专业相应问题的能力,使学生树立正确的设计思想,掌握工程设计的一般程序和方法,完成电气工程技术人员必须具备的基本能力的培养和训练。
关键词:控制电路受电弓主断路器故障处理目录摘要 (2)引言 (5)1主电路 (7)1.1主电路的特点 (7)1.1.2牵引电动机供电方式 (7)1.1.6保护系统 (8)1.2.2整流调整电路 (8)2辅助电路 (14)2.1 单一三相供电系统 (14)2.3单相负载电路 (16)3控制电路 (18)3.2.5通风机控制 (21)3.2.10预备环节控制 (24)结论 (33)致谢 .................................................................................................... 错误!未定义书签。
SS4改型电力机车主辅电路分析
SS4改型电力机车主辅电路分析学生姓名:学号:专业班级:指导教师:摘要电力机车电路通常由3部分组成,既主电路、辅助电路和控制电路。
主电路是指将牵引电动机及其相关的电气设备连接而成的线路,该线路具有电压高、电流大的特点,因此亦称高压电路或牵引动力电路,根据机车的运行情况,对机车提出了各种要求,以满足机车安全运行需要。
主电路的结构将直接影响机车运行性能的好坏、投资的多少、维修费用的高低等重要经济指标,要对各型机车住电路单元电路的结构方式,如整流调压方式、供电方式、磁场削弱方式、电气制动方式的讨论过渡到具体机车的主电路。
机车的主电路要进行功率传递,其结构决定了机车的类型,同时在很大的程度上决定了机车的基本性能,直接影响机车性能的游劣、投资的多少、维修费用的高低等技术经济指标。
电力机车的辅助设备是为了保证主电路中各电气设备的正常工作而设置的。
辅助电路是指将辅助设备及其相关的电气设备连接而成的电路。
辅助电路能否正常工作,直接影响主电路能否正常工作,亦既影响机车的正常工作。
辅助电路中的辅助设备是为保护主电路的正常工作和各项辅助功能而设置的。
SS4改型及车上的辅助设备主要有分相设备,为机车上的所有三相负载提供三相交流电源;通风机组,用来冷却牵引电动机、硅整流柜、制动电阻柜、主变压器油散热器等设备;空气压缩机组,生产机车上所需要的压缩空气,给机车上的所有电动器件和空气制动系统提供动力源。
辅助电路时有电源电路、伏在电路和保护电路组成。
关键词:主电路;辅助电路;SS4改型电力机车目录摘要 (I)引言 (4)1 SS4改型电力机车主电路分析 (5)1.1 概述 (5)1.1.1 机车电路的分类、及电力机车主电路的组成 (5)1.1.2 对电力机车主电路的基本要求 (6)1.2 电力机车主电路结构分析 (6)1.2.1 变流调压方式 (6)1.2.2 供电方式 (6)1.2.3 磁场削弱方式 (7)1.2.4 电气制动方式 (8)1.2.5 牵引电动机型式及联结方式 (8)1.2.6检测及保护方式 (8)1.3 SS4改电力机车主电路分析 (12)1.3.1 SS4改型电力机车主电路分析 (12)1.3.2 SS4改机车的一些参数与特点: (16)2 SS4改型电力机车辅助电路分析 (17)2.1 电力机车的辅助设备 (17)2.1.1 辅助线路组成 (17)2.1.2 分相设备 (17)2.1.3 旋转式异步劈相机 (18)2.1.4 辅助变流器 (18)2.1.5 辅助设备的设置和启动 (19)2.2 SS4改型电力机车辅助电路分析 (20)2.2.1 单-三相供电系统 (21)2.2.2 三相负载电路 (21)2.2.3 单相负载电路 (22)2.2.4 保护电路 (23)2.2.5 列车供电系统 (24)3 SS4改电力机车常见故障及处理 .......................................................... 错误!未定义书签。
毕业设计(论文)-SS4改电力机车控制电路分析

1.1.7
当主司机控制器换向手柄置“制动”位时,导线402、403、405有电。
其控制电路为:465·570QS·401·627AC1·402
465·570QS·401·627AC2·403
1.1
1.1.1
受电弓的升起是由压缩空气进入升弓气缸推动气缸内的活塞而进行的,所以,要升起受电弓,必须具备足够的压缩空气。
压缩空气的开通和关断受电磁阀287yv控制,具体控制过程如下:
1.
保护阀供电电路为:464·602QA·570QS·531·20QP·50QP·297QP·287YV·400
若此时门联锁以正常关闭,则门联锁阀动作,使高压室门联锁,并开通通向受电弓电磁阀的气路,为升弓做好准备.
其控制电路为:465·570QS·401·627AC1·402
465·570QS·401·627AC3·404
465·570QS·401·627ac5·406
其中导线402、406的作用与牵引向前时相同,导线404是向后8KA·(107YVBW+108YVBW)·400
韶山4型电力机车控制电路分析
学生姓名:
学号:083
专业班级:机车382806
指导教师:
摘
SS4改型电力机车(从159#车起)是八轴重载货运机车,由两节完全相同的四轴机车用车钩与连挂风挡连接组成,其间设有电气系统高压连接器和重联控制电缆,以及空气系统重联控制风管,可在其中任一节车的司机室对全车进行统一控制。另外,在机车两端还设有重联装置,可与一台或数台SS4改进型机车连接,进行重联运行。机车采用国际标准电流制,即单相工频制,电压为25kV。采用传统的交—直传动形式,使用传统的串励式脉流牵引电动机。机车具有四台两轴转向架,采用推挽式牵引方式,固定轴距较短,采用转向架独立供电方式,全车四个两轴转向架,具有相应的四台独立的相控式主整流装置。主整流装置采用三段不等分半控调压整流电路。机车电气制动系统采用加馈电阻制动,使机车低速制动力得以提高。机车辅助系统采用传统的旋转式劈相机单——三相交流系统。机车设备布置采用双边纵走廊、分室斜对称布置,设备屏柜化,成套化。机车通风采用车体通风方式,进风口为车体侧墙大面积立式百叶窗,各主要设备的通风支路采用串并联方式,来满足机车通风要求。
ss4改韶山4改电力机车主电路辅助电路控制电路保护电路
第4章电力机车线路第1节SS4G型机车主电路SS4G型电力机车主电路(见附图一)是以SS4、SS5和SS6型机车主电路为基础,并消化、吸收了8K和6K型机车的一些先进技术而设计的。
具有如下主要特点:1.机车采用加馈电阻制动,每节车四台牵引电机主极绕组串联,由一台励磁半控桥式整流器供电。
每台转向架上的二台牵引电机电枢与各自的制动电阻串联后,并联在一起,并与主整流器相串联。
2.机车全部采用了霍耳传感器检测直流电流、电压信号,以利司机安全,并可提高系统的控制精度。
3.为提高机车功率因数和改善通讯干扰,机车增加了PFC装置。
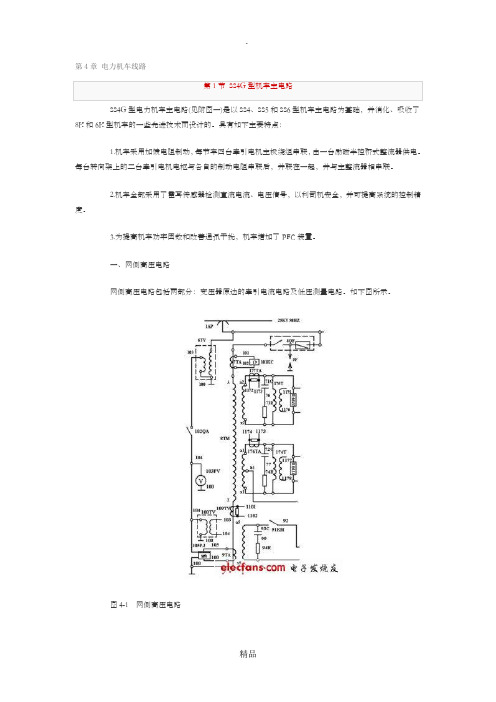
一、网侧高压电路网侧高压电路包括两部分:变压器原边的牵引电流电路及低压测量电路。
如下图所示。
图4-1 网侧高压电路由受电弓1AP引入接触网高压电,经主断路器4QF、高压电压互感器6TV、高压电流互感器7TA 引入机车内部,原边电流经主变压器8TM的高压(原边)绕组AX,由机车接地装置向牵引变电所回流。
二节车之间的25kV母线用高压联接器2AP进行连接。
低压部分有自动开关102QA、网压表103PV、电度表105PJ、PFC用电压互感器100TV,以及接地电刷110E、120E、130E和140E。
这些电器设备所组成的电路主要用于检测机车网压和提供电度表用的电压信号。
二、整流调压电路采用转向架独立供电方式,由二套独立的整流调压电路,分别向相应的转向架供电。
牵引绕组a1-b1-x1和a2-x2供电给主整流器70V,组成前转向架供电单元;牵引绕组a3-b3-x3和a4-x4供电给主整流器80V组成后转向架供电单元。
下图所示为前转向架单元的三段不等分半控桥式整流调压电路。
其中各段绕组的电压为Ua2x2=Ua1x1=2Ua1b1=2Ub1x1=699.5V图4-2 前转向架单元整流调压电路三段不等分整流桥的工作顺序简述如下:首先投入四臂桥。
即触发四臂桥的晶闸管,投入a2-x2绕组。
整流电压由零逐渐升至1/2Ud(Ud 为总整流电压),六臂桥的整流元件续流。
ss4改韶山4改电力机车主电路辅助电路控制电路保护电路

由受电弓1AP引入接触网高压电,经主断路器4QF、高压电压互感器6TV、高压电流互感器7TA 引入机车内部,原边电流经主变压器8TM的高压(原边)绕组AX,由机车接地装置向牵引变电所回流。
二节车之间的25kV母线用高压联接器2AP进行连接。
低压部分有自动开关102QA、网压表103PV、电度表105PJ、PFC用电压互感器100TV,以及接地电刷110E、120E、130E和140E。
这些电器设备所组成的电路主要用于检测机车网压和提供电度表用的电压信号。
二、整流调压电路采用转向架独立供电方式,由二套独立的整流调压电路,分别向相应的转向架供电。
牵引绕组a1-b1-x1和a2-x2供电给主整流器70V,组成前转向架供电单元;牵引绕组a3-b3-x3和a4-x4供电给主整流器80V组成后转向架供电单元。
下图所示为前转向架单元的三段不等分半控桥式整流调压电路。
其中各段绕组的电压为Ua2x2=Ua1x1=2Ua1b1=2Ub1x1=699.5V图4-2 前转向架单元整流调压电路三段不等分整流桥的工作顺序简述如下:首先投入四臂桥。
即触发四臂桥的晶闸管,投入a2-x2绕组。
整流电压由零逐渐升至1/2Ud(Ud 为总整流电压),六臂桥的整流元件续流。
当四臂桥满开放后,六臂桥投入。
先投入绕组a1-b1,整流电压在1/2~3/4Ud之间调节。
待满开放后,b1-x1绕组再投入,整流电压在3/4Ud~Ud之间调节。
在整流器的输出端还分别并联了两个电阻75R和76R,其电阻的作用有两个:一是机车高压空载做限压试验时,作整流器的负载,起续流作用;二是正常运行时,能够吸收部分过电压。
三、牵引电路机车的牵引电路,即机车主电路的直流电路部分,部分电路如下图所示。
图4-3 牵引电路示意图机车牵引电路,采用转向架独立供电方式。
第一转向架的第一台牵引电机1M与第二台牵引电机2M并联,由主整流器70V供电;第二转向架的第三台牵引电机3M与第四台牵引电机4M并联,由主整流器80V供电。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
查阅资料,画出ss4机车主电路原理图,简述其基本特点,如:调压方式、整流方式、供电方式、制动方式等一、SS4改型电力机车主电路的特点:1. 传动方式为交—直传动,串励脉流牵引电动机牵引;2. 转向架供电为独立供电方式;3. 不等分三段半控整流调压电路,有级磁场削弱;4. 加馈电阻制动,最大制动力延伸至11.5 km/h;5. 直流电流、电压测量传感器化;6. 双接地继电保护;7. 增设PFC功补装置。
二、主电路构成(一)网侧高压电路(25KV电路)主要设备:1.高压部分有受电弓1AP、高压连接器2AP、空气断路器4QF、避雷器5F、高压电压互感器6TV、高压电流互感器7TA、主变压器8TM原边绕组。
2.低压部分有自动开关102QA、网压表103PV、PFC用电压互感器100TV、PFC用电流互感器109TA、电度表105PJ,以及接地回流电刷110E、120E、130E、140E。
:3.电流回路:高压连接器2AP→另一节车的车顶母线主断路器4QF→高压电流互感器7TA→主变压器原边绕组A—X →PFC用电流互感器109TA→低压电流互感器9TA→车体→转向架构架→接地回流电刷(二)整流调压电路(Ⅰ架)采用转向架独立供电:a1-b1-x1,a2-x2供电给整流器70V ,70V 给并联的第1、2位牵引电机供电;a3-b3-x3,a4-x4供电给整流器80V ,80V 给并联的第3、4位牵引电机供电。
额定网压时:2211111133332222695.4a x a x a b b x a b b x U U U U U U V ======不等分三段半控桥式整流电路工作顺序(Ⅰ架为例):首先投入4臂桥,触发T5和T6,投入a2-x2段绕组,T5和T6顺序移相。
整流输出电压0~12d U 变化,D1和D2续流。
正半周:a2(正)→D3→71号母线→平波电抗器→牵引电机线路接触器→牵引电机→牵引电机故障隔离开关→72号母线→D2→D1→73号母线→T6→x2(负)。
负半周:x2(正)→T5→71号母线→平波电抗器→牵引电机线路接触器→牵引电机→牵引电机故障隔离开关→72号母线→D2→D1→73号母线→D4→a2(负)。
当T5和T6满开放后,六臂桥投入,维持T5和T6满开放,触发T1和T2,在原有a2-x2段绕组的基础上再串联a1-b1段绕组。
整流电压12dU~34dU变化。
正半周:a2(正)→D3→71号母线→平波电抗器→牵引电机线路接触器→牵引电机→牵引电机故障隔离开关→72号母线→T2→b1(负)→a1(正)→D1→73号母线→T6→x2(负)。
负半周:x2(正)→T5→71号母线→平波电抗器→牵引电机线路接触器→牵引电机→牵引电机故障隔离开关→72号母线→D2→a1(负)→b1(正)→T1→73号母线→D4→a2(负)。
当T1和T2满开放后,维持T1、T2、T5、T6满开放,触发T3和T4,则b1-x1段绕组再串入电路,整流电压34dU~d U之间变化。
正半周:a2(正)→D3→71号母线→平波电抗器→牵引电机线路接触器→牵引电机→牵引电机故障隔离开关→72号母线→T4→x1(负)→a1(正)→D1→73号母线→T6→x2(负)。
负半周:x2(正)→T5→71号母线→平波电抗器→牵引电机线路接触器→牵引电机→牵引电机故障隔离开关→72号母线→D2→a1(负)→x1(正)→T3→73号母线→D4→a2(负)。
电阻75R和76R的作用:①高压空载限流试验时,作整流器70V的负载(只有75R作负载,76R被空载实验转换开关10QP短接),②机车正常运行时,可吸收部分过电压。
(三)牵引供电电路1.转向架独立供电:1M与2M并联工作,由整流器70V供电;3M与4M并联工作,由整流器80V供电。
2. 牵引电机支路电流路径:以1M为例:正极母线71→平波电抗器11L→牵引电机线路接触器12KM→直流电流传感器111SC→1M电机电枢回路(A11→A12)→107QPR1“牵-制”鼓→107QPV1 “前-后”鼓→1M电机励磁回路(D11→D12)→107QPV1 “前-后”鼓→107QPR1 “牵-制”鼓→牵引电机故障隔离开关19QS→负极母线72 。
因同一转向架两牵引电机背向布置,则牵引电机相对旋向相反。
因此各牵引电机电枢回路与励磁回路的相对接线方式为(前方向):1M: A11 A12→D11 D12 2M: A21 A22→D22 D213M: A31 A32→D31 D32 4M: A41 A42→D42 D413. 磁场削弱以1M为例:在牵引电机励磁绕组两端并联有固定分路电阻14R,固定磁场消弱系数β=0.96;可减小流过励磁绕组的交流分量,从而改善牵引电机的换向。
一级磁削电阻15R和磁场削弱接触器17KM;二级磁削电阻16R和磁场削弱接触器18KM 。
当17KM动作闭合后,投入15R,实现Ⅰ级磁削,β=0.7 ;当18KM动作闭合后,投入16R,实现Ⅱ级磁削,β=0.54 ;当17KM和18KM都闭合时,15R和16R并联投入,实现Ⅲ级磁削,β=0.45 。
4. 牵引电机的故障隔离牵引电机故障隔离开关19QS、29QS、39QS、49QS为单刀双掷开关。
上为“运行”位,下为“故障”位。
当某台牵引电机故障时(非接地故障)时,可将该台牵引电机的故障隔离开关拉“故障”位,其相应的联锁触头将切断该电机的线路接触器的电空阀得电路径,使线路接触器的电空阀不能得电而处于打开状态,该电机支路与供电电路隔离,不投入工作。
若为牵引电机接地故障,则拉至“中间”位,使牵引电机与主电路完全隔离,否则仍会引起主接地继电器跳闸,且运行中不得使用电阻制动。
5. 库内动车库用转换开关20QP、50QP为双刀双掷开关,正常运行时,主刀与主电路隔离,其辅助接点将保护电空阀287YV的得电电路连通,当287YV得电时,打开升弓气路,方可升弓。
机车在库内时,因无25KV的高压电源,但可将库内的110V直流电源引入牵引电机实现动车,以Ⅰ端为例:则将20QP转库用位,其主刀之一将库用插座30XS的正极接线端与2M的电枢正极引线22号线连接。
20QP的另一主刀将Ⅰ端整流器的72号母线直接接车体。
所以库内动车人员只需引入110V直流电源的正极即可实现动车(库内110V电源的负极与钢轨相连),机车的运行方向可通过人为转换两位置转换开关实现。
此时20QP的联锁触头切断287YV得电电路,使287YV不能得电,则库内不能升起受电弓。
同时,20QP的联锁触头还接通牵引电机线线路接触器12KM、22KM的电空阀得电电路(给上司机钥匙、两位置转换开关转换到位时电路才能构通),使1M也可通电,便于机车出厂实验电机转向、出入库及旋轮。
保护电空阀287YV得电电路牵引电机线路接触器得电电路6、空载试验10QP和60QP为三刀双掷开关,正常运行时,10QP和60QP将直流电压传感器112SV和142SV 分别与1M和4M的电枢相连,其相应辅助接点接通牵引电机线路接触器的电空阀的得电路径。
机车空载实验时,10QP和60QP将112SV和142SV分别与主整流器70V和80V的输出端相连,同时短接76R 和86R ,使75R 作为Ⅰ端主整流器的负载,85R 作为Ⅱ端主整流器的负载(75R ,76R,85R,86R 阻值为300Ω,且为2串结构,则空载实验时主整流器的负载阻值为600Ω)。
其辅助接点断开牵引电机线路接触器的电空阀得电路径,使牵引电机不能接入主电路,实现主整流器的空载实验。
注:1、每一台牵引电机设有一台直流电流传感器和一台直流电压传感器。
作用有:①给电子控制柜电流与电压反馈信号,作为机车速度调节控制和过流保护的依据;②通过电子控制柜处理后,作为司机台电流表与电压表显示的信号检测。
2、直流电压传感器设置在电枢两端有优点:①牵引与制动时,司机台均能看到牵引电机电压;②两台并联的牵引电机之一空转时,电枢电压反应较快。
3、取消传统的电机电流过流继电器,电机过流信号由直流传感器检测经电子控制柜发出,而进行卸载或跳主断路器或断开接触器。
(四)加馈电阻制动电路加馈电阻制动又称为“补足”电阻制动,是在常规电阻制动基础上发展的一种能耗制动,可实现机车“恒制动力”的控制。
机车的轮周制动力为: z B C I Φ= ()NC --机车结构常数;Φ--电机主磁通(Wb );z I --电机电枢(制动)电流(A )。
常规电阻制动中,当电机主励磁最大恒定后,制动电流将随机车速度的降低而减小,轮周制动力也随之而变化,为了克服在低速区时制动力的减小,加馈电阻制动是从电网吸收电能,通过相控主整流器向电机电枢补足z I 并保持恒定,以此获得理想的最大轮周制动力恒定值。
电制动时,通过两位置转换开关的转换,“牵引”→“制动”。
电枢回路与制动电电阻相串联(加馈时还与主整流器的一段大桥相连),每节车的4台牵引电机的励磁绕组串联后由励磁整流桥单独供电。
此时牵引电机做他励发电机运行,发出的电消耗在制动电阻上,使电枢绕组通过电流在主磁场中受力而产生制动转矩,对机车和后部车辆产生制动作1、电枢回路:(1)当V>33km/h时,机车处于纯电阻制动状态,电流路径为:1M电机电枢A12(正)→107QPR1“牵-制”鼓→13号线→制动电阻13R→73号母线→D4→D3→71号母线→平波电抗器11L→牵引电机线路接触器12KM→12号线→直流电流传感器111SC→1M电机电枢A11(负)。
(2)当V<33km/h时,机车处于加馈电阻制动状态,触发T5和T6,一段大桥投入,a2-x2绕组的交流电经整流输出后串入牵引电机电枢回路中,补足z I。
正半周:1M电机电枢A12(正)→107QPR1“牵-制”鼓→13号线→制动电阻13R→73号母线→T6→x2(负)→a2(正)→D3→71号母线→平波电抗器11L→牵引电机线路接触器12KM→12号线→直流电流传感器111SC→1M电机电枢A11(负)。
负半周:1M电机电枢A12(正)→107QPR1“牵-制”鼓→13号线→制动电阻13R→73号母线→D4→a2(负)→x2(正)→T5→71号母线→平波电抗器11L→牵引电机线路接触器12KM→12号线→直流电流传感器111SC→1M电机电枢A11(负)。
(五)保护电路(控制原理在整备控制电路中详讲)1、短路保护网侧短路:通过高压电流互感器7TA(变比为200/5)与原边过流继电器101KC(动作值为8A)配合动作使主断路器4QF分闸。
整定值为320A。
次边短路:经交流电流互感器176TA、177TA、186TA、187TA检测电流→电子柜。
经电子柜过流保护环节最终使主断路器4QF分闸。