数学建模追逐问题
数学建模追逐问题
实验追逐问题L问题提出在图8. 4中,假设正方形ABCD的四个顶点处各站人.在集时刻,四人同时以匀速v 沿顺时针方向追逐卜一个人,并且在任意时刻他们绘终保持追逐的方向是对准追逐目柿"例如、A追逐D任惫时刻A始终向着B追+可Wiil'nJJ四人的运动轨迹将按蛭旋删线状汇合于中心O.怎样证明呢?有两种证明方法.一是分别求出四人的运动轨迹曲纯解析式"求证艸条曲线在某时刻相交[一乩力一方丛则是用计律机模拟将四人的运动轨迹H观地去示在图形上*2.建亡模型及模拟方法模拟步骤;1)建立平面直箱坐标系.2)以时间间3进行采样,在毎一时H+算每个人在卜一时t+加时的坐标.3)不妨设屮的追遂对象是乙,在时MtlbL甲的酸标为(兀$),乙的坐标旳仕2小) + 屮在t+ 3 时的坐标为(”丫1 + cos^j^ +1込『虹口&1Jt屮cos# 二一用inf 二一= J(x2-^i)2 +(v2 - Vi)2a d ~ ~同珅,乙在T+At时的砸标为(x2 4- vAt cos0.y2 +皿f sin &) *4选取足够小的At,模拟到d <vAf时为止.5)连接四人在齐时刻的位社,就得到濟求的轨迹*连纯系统模拟的特点是首先选定一个时间步K (迪常是零间距的)i JC次按时何顺用推进*每推进一个时间步长,就对系统的活动和状态按预定的规则和冃的进行考察"分析r II 算、记录,亘到预定模拟结束条件(通常是时间条件)为止.Matlab程序如下:%取v=1,t=12,A,B,C,D 点的坐标分另为(0, 10), (10, 10) , (10, 0), (0, 0)v=1;dt=0.05;d=20;x=[0 0 0 10 10 10 10 0];x(9)=x(1);x(10)=x(2);holdaxis('equal')axis([0 10 0 10]);for k=1:2:7plot(x(k),x(k+1),'.')endwhile(d>0.1)for i=1:2:7d=sqrt((x(i)-x(i+1))A2+(x(i+1)-x(i+3))A2);x(i)=x(i)+v*dt*(x(i+2)-x(i))/d;x(i+1)=x(i+1)+v*dt*(x(i+3)-x(i+1))/d;plot(x(i),x(i+1),'.')endx(9)= x(1); x(10)= x(2);endhold运行结果如下:狼追击兔子的问题狼追击兔子问题是欧洲文艺复兴时代的著名人物达■芬奇提出的一个数学问题。
数学建模-微分解法-狗追狼问题
数学建模微分作业烟台大学文经学院解:设狼在A 点登岛,此时狗在O 点,以OA 为X 轴建立直角坐标系如下:设t 时刻时,狗到达M 点,其速度1v 分解如上图,则易得2221y x v v v +=(1)。
在极坐标下,狗跑到点M (ρ,θ),分解后对应的直角坐标上有:cos x t ρω=,sin y t ρω=设狼的角速度为ω,由题意知狼、狗、圆心始终在一条直线上,所以狼与狗的角速度相等,且2v Rω=。
分析M 点有:cos sin x dx d v t t dt dtρωρωω==-(2), sin cos y dy d v t t dt dtρωρωω==+(3) 将(2)(3)式带入(1)式得22221d v dt ρωρ⎛⎫=+ ⎪⎝⎭,即d dtρ=解得dt =两边同乘ω得 2221ρωρωω-=v d dt=2221ρωρ-vd=221211ρωωρvv d -两边积分得221211ρωωρωvv d dt -=⎰⎰得1arcsin C t v ωθω⎛⎫+=⎪⎝⎭当0=t 时,0ρ= 所以0=C所以1sin vρθω=(3)根据 222ρ=+y x (4) ()s i n c o s x y ρθθ+=+(5)根据(3)(4)(5)得()221sin cos v x y x y a θθω+=+-又cos x ρθ=R v 2=ω 所以21122v R v y v y y x ==+ω算得狗的运动轨迹方程为 222112222v v x y R R v v ⎛⎫⎛⎫+-=⎪ ⎪⎝⎭⎝⎭ 则该圆必过圆心,且与X 轴相切,所以狗运动的圆心必在Y 轴。
综上所述有以下三种情况: 第一种:当1222v Rv <即12v Rv <时,狗追不上狼。
第二种 当1222v Rv =,即12v Rv =时,狗在B 点追上狼。
第三种:2221Rv v >,即21Rv v >时,狗在C 点追上狼。
数学追赶问题计算公式

数学追赶问题计算公式在咱们学习数学的过程中,有一个特别有趣的知识点,那就是追赶问题。
说起这个追赶问题啊,它就像是一场你追我赶的比赛,充满了挑战和乐趣。
咱们先来说说追赶问题常见的计算公式。
比如说,有甲和乙两个人,甲在前面跑,速度是 V1 ,乙在后面追,速度是 V2 ,开始的时候两人相距 S ,经过时间 t 后乙追上了甲。
那这个时候,追赶问题的基本公式就是:S = (V2 - V1)×t 。
这个公式看起来简单,但是用起来可大有学问。
咱们来举个例子哈,有一天我在公园里散步,看到两个小朋友在玩追逐游戏。
前面的小朋友小明跑得挺快,速度大概是 3 米每秒,后面的小朋友小刚速度能达到 4 米每秒。
一开始他们相距 10 米,那小刚啥时候能追上小明呢?咱们就可以用这个公式来算算。
首先,V1 就是小明的速度 3 米每秒,V2 是小刚的速度 4 米每秒,S 是 10 米。
代入公式就是:10 = (4 - 3)×t ,算一下就知道 t = 10 秒。
也就是说,10 秒后小刚就能追上小明啦。
再比如说,在公路上,一辆汽车 A 以 60 千米每小时的速度行驶,另一辆汽车 B 以 80 千米每小时的速度追赶,两车一开始相距 50 千米。
那 B 车追上 A 车需要多长时间?同样的,V1 是 60 千米每小时,V2 是80 千米每小时,S 是 50 千米。
代入公式 50 = (80 - 60)×t ,算出 t = 2.5 小时。
追赶问题可不只是在这些简单的例子里出现哦。
想象一下,在田径赛场上,长跑运动员之间的追逐;或者是在动物世界里,猎豹追捕羚羊的场景,其实都能用到咱们这个追赶问题的计算公式。
而且啊,在实际生活中,追赶问题的应用也特别广泛。
就像咱们坐地铁的时候,两列地铁先后出发,可能就会存在追赶的情况;还有物流运输中,不同速度的货车送货,也可能涉及到追赶的时间计算。
总之,这个数学中的追赶问题计算公式虽然简单,但用处可真不小。
追逐问题
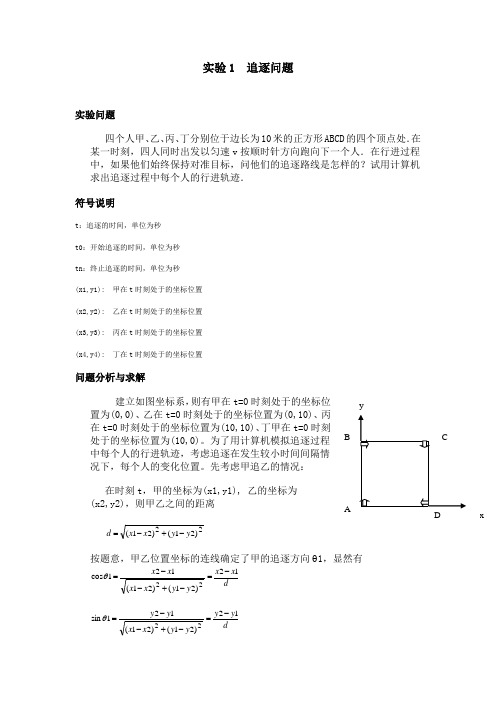
实验1 追逐问题实验问题四个人甲、乙、丙、丁分别位于边长为10米的正方形ABCD 的四个顶点处.在某一时刻,四人同时出发以匀速v 按顺时针方向跑向下一个人.在行进过程中,如果他们始终保持对准目标,问他们的追逐路线是怎样的?试用计算机求出追逐过程中每个人的行进轨迹.符号说明t :追逐的时间,单位为秒t0:开始追逐的时间,单位为秒tn :终止追逐的时间,单位为秒(x1,y1): 甲在t 时刻处于的坐标位置(x2,y2): 乙在t 时刻处于的坐标位置(x3,y3): 丙在t 时刻处于的坐标位置(x4,y4): 丁在t 时刻处于的坐标位置问题分析与求解建立如图坐标系,则有甲在t=0时刻处于的坐标位置为(0,0)、乙在t=0时刻处于的坐标位置为(0,10)、丙在t=0时刻处于的坐标位置为(10,10)、丁甲在t=0时刻处于的坐标位置为(10,0)。
为了用计算机模拟追逐过程中每个人的行进轨迹,考虑追逐在发生较小时间间隔情况下,每个人的变化位置。
先考虑甲追乙的情况:在时刻t ,甲的坐标为(x1,y1), 乙的坐标为(x2,y2),则甲乙之间的距离 22)21()21(y y x x d -+-=按题意,甲乙位置坐标的连线确定了甲的追逐方向θ1,显然有dx x y y x x x x 12)21()21(121cos 22-=-+--=θdy y y y x x y y 12)21()21(121sin 22-=-+--=θx当追逐又延续了时间间隔∆t 后,假设时间间隔∆t 较小,有甲的坐标变为 (x1+v ∆tcos θ1,y1+v ∆tsin θ1)类似地,有在在时刻由t 变到t+∆t 时,乙的坐标变为:(x2+v ∆tcos θ2,y2+v ∆tsin θ2)22)23()23(232cos y y x x x x -+--=θ 22)23()23(232sin y y x x y y -+--=θ丙的坐标变为:(x3+v ∆tcos θ3,y3+v ∆tsin θ3)22)43()43(343cos y y x x x x -+--=θ 22)43()43(343sin y y x x y y -+--=θ丁的坐标变为:(x4+v ∆tcos θ4,y4+v ∆tsin θ4)22)41()41(414cos y y x x x x -+--=θ 22)41()41(414sin y y x x y y -+--=θ设开始追逐的时间t0=0,将整个追逐时间分为n 等份,每一个时间采样间隔为∆t =tn/n,这样我们可以在每个追逐的时间进行∆t 后利用如上公式依次算出每个人位置变化的坐标,然后用小直线段分别连接每个人的位置坐标,画出相应的图形就可以看到计算机模拟出的追逐路线。
数学建模-猎狗追兔子问题
数学建模论文《数学建模》(2014春)课程期末论文摘要(一)对于问题一:自然科学中存在许多变量,也有许多常量,而我们要善于通过建立合适的模型找到这些变量之中的不变量。
猎狗追赶兔子的问题是我们在生活中常见的实例,而题目把我们生活中的普通的例子抽象成为高等数学中微分方程的例子,通过对高阶微分方程的分析,建立微分方程模型,并用数学软件编写程序求解,得出结论,解决生活中常见的实际问题。
(二)对于问题二:学习使用matlab进行数学模型的求解,掌握常用计算机软件的使用方法。
关键词微分方程导数的几何意义猎狗追兔子数学建模数学软件一、问题重述如图1所示,有一只猎狗在B 点位置,发现了一只兔子在正东北方距离它250m 的地方O 处,此时兔子开始以8m/s 的速度正向正西北方向,距离为150m 的洞口A 全速跑去. 假设猎狗在追赶兔子的时候,始终朝着兔子的方向全速奔跑。
请回答下面的问题:⑴ 猎狗能追上兔子的最小速度是多少? ⑵ 在猎狗能追上兔子的情况下,猎狗跑过的路程 是少?⑶ 假设猎狗在追赶过程中,当猎狗与兔子之间的距离为30m 时,兔子由于害怕导致奔跑速度每秒减半, 而狗却由于兴奋奔跑速度每秒增加0.1倍,在这种情 况下回答前面两个问题。
二、问题分析与假设在猎狗追赶兔子的时候猎狗一直朝着兔子的方向追赶,所以可以建立平面直角坐标系,通过导数联立起猎狗运动位移,速度和兔子的运动状态。
1.假设兔子的运动是匀速的。
2.假设猎狗的运动轨迹是一条光滑并且一阶导数存在的曲线。
3.猎狗的运动时匀速或者匀变速的。
4.猎狗运动时总是朝向兔子。
三、模型的建立及求解3.1 符号规定1.(x ,y ):猎狗或者兔子所在位置的坐标。
2. t :从开始到问题结束经过的时间。
3. a:猎狗奔跑的路程。
4. v:猎狗的奔跑速度。
3.2 模型一的建立与求解猎狗能够抓到兔子的必要条件:猎狗的运动轨迹在OA 要有交点以OA 为y 轴,以OB 为x 轴建立坐标系,则由图有O(0,0),A(0,150),B(250,0),兔子的初始位置0点,而猎狗初始位置是B 点,t (s )后猎狗到达了C (x ,y ),而兔子到达了D (0,8t ),则有CD 的连线是猎狗运动轨迹的一条切线,由导数的几何意义有:NW8dy y tdx x-=dav dt =da =三式联立消去t ,得到;设:若猎狗可以追上兔子则有当兔子在OA,猎狗在OB 之间运动时此方程有解,设:得到:得到:两式联立相加得到:1.如果q=1即v=8 m/s 得到所以此情况无交点,所以v=8m/s 猎狗无法追上兔子; 2.如果q<1即v>8m/s 得到此情况有交点,所以有可能能够追上兔子,如果要追上兔子需要y<=150; 解得到: 即所以这种情况下能够追上的最小速度是 .3.如果q>1 利用上式得到,所以这种情况不能追上兔子。
数学建模实验报告大小圆追击问题
数学建模实验报告一.实验题目第一题:设一个小圆在大圆内无滑动的滚动,用Matlab变编程探讨小圆上或小圆内一点的运动轨迹。
问题分析:由题目条件可知,小圆在大圆内无滑动滚动,所以对于小圆与大圆的初始接触点来说,该点滑动的弧长即为小圆滚动的路程。
由此便可以联系小圆与大圆。
首先,分析目标点。
若对小圆上一点进行观察,对于任意两点,从它不再与大圆接触到再一次与大圆接触,其运动轨迹必然是相同的(仅讨论轨迹弧线的形状,初末位置不做要求)。
所以,我们可以以初始位置时的接触点来考察运动轨迹。
若对小圆内(非圆心)一点进行考察,则其轨迹必与其在小圆上的对应点相似。
故可以先计算出小圆上对应点的轨迹,然后缩放移动即可。
若对小圆圆心进行考察,则易知其轨迹必为一圆。
分析完成后,下面开始讨论轨迹的计算方法。
由于除圆心外,轨迹是类似于摆线的一条曲线,所以用参数方程进行求解。
具体做法是以大圆圆心为原点,建立一个直角坐标系。
由于小圆的初始位置与小圆上或小圆内一点的运动轨迹无关,所以,我们不妨设小圆与大圆初始位置时的接触点在X轴正半轴上。
之后再以小圆的圆心建立一个直角坐标系。
对于这个坐标系里的任一点,可以利用向量的计算方法,由于大圆圆心和小圆圆心连线的向量是可求的,所以可将该点投影到以大圆圆心建立的坐标系中。
在计算该点的参数方程时,可使用公式l=Ra,a为圆心角。
先求出该点在以小圆圆心为原点的坐标系中的参数方程,然后投影至另一坐标系中即可。
若观察的是圆上一点,则只需将原程序中的小圆半径换成该点到小圆圆心的距离即可。
具体计算过程如下:Matlab代码:h=0.1;q=0:h:20*pi;R=5;r=3; d=2;v=-R/r;xR=R*cos(q);yR=R*sin(q);xrh=(R-r)*cos(q);yrh=(R-r)*sin(q);xr=xh+d*cos(v*q+q);yr=yh+d*sin(v*q+q);plot(xh,yh,xx,yy,xz,yz);结果截图:绿色为大圆,半径10,蓝色为小圆圆心轨迹,小圆半径为3,红色为小圆上一点轨迹。
饿狼追兔问题数学建模
饿狼追兔问题数学建模数学建模饿狼追兔问题摘要本文研究饿狼追兔问题,是在给定狼兔相对位置,以及兔子巢穴位置的情况下求解的,狼的速度是兔子速度两倍,在不考虑其他任何因素的情况下研究狼能否追上兔子的问题。
首先,我们对问题进行了适当的分析,然后根据已知条件建立了狼的运动轨迹微分模型。
其次,根据建好的模型,运用MATLAB编程,然后仿真画出了饿狼和野兔的运动轨迹图。
再次,用解析方法将建立的模型求解,并给出该问题的结论,准确的回答题目。
最后,用数值方法求解,将所求与前面所求进行对比,也给出结论,回答题目。
并将两种方法做相应比较。
结论:野兔可以安全回巢关键词:算法高阶常微分方程§1.1问题的提出在自然界中,各种生物都有它的生活规律,它们钩心斗角,各项神通,在饿狼追野兔的工程中,饿狼的速度是野兔的二倍,但是野兔有自己的洞穴,野兔在跑到自己洞穴之前被狼捉住,野兔就将会成为饿狼的囊中之物;如果野兔在饿狼捉住自己之前跑回到自己的洞穴,那么野兔就保住小命,得以生还。
图1-1-1为饿狼追野兔的两条曲线,其中绿线表示野兔,图中的箭头表示的是野兔的奔跑方向,野兔从远点开始沿y轴正方向运动,其洞穴在坐标为(0,60)的位置;红线为饿狼的运动轨迹,,图中的剪头表示饿狼追逐野兔的方向,饿狼从坐标为(100,0)的方向追逐野兔,饿狼的速度是野兔速度的二倍。
建立数学模型需研究一下几个问题:(1)设野兔的速度我v0,饿狼的速度为v1,野兔的奔跑方向是沿y轴正方向奔跑,而饿狼的方向是一直指向野兔的方向,即饿狼的运动的轨迹某一时候的切线指向同一时刻的野兔的位置。
建立饿狼追野兔的运动轨迹微分模型。
(2)根据建立的饿狼运动轨迹得微分模型,作出饿狼与野兔的运动轨迹图形。
(3)用解析方法求解,即根据第二步作出的饿狼渔业突地运动轨迹图形,分析兔子能否安全回到巢穴,即野兔的运动曲线与饿狼的运动曲线的交点是在点(0,60)-野兔巢穴的上面还是下面。
四只乌龟追逐问题
已知4只小狗可拓展模型为n只小狗的追逐问题,即模型为边长为a的n边形,最后在中心点相遇。
dS=[1+ ( )^2]^ (1 Nhomakorabea2) *dx
设x=a/2+r*cosφ
y=a/2+r*sinφ
模型建立:
Min t=S/v
s.t
求出r和S
进而求出时间t=S/v
法二:看图求解
每个时刻,四只小狗所在四点总是圆的四等分点,此圆的半径不断缩小,最后到达中心。每只小狗速度可分解为一个向心速度及一个切向速度,切向速度不改变圆的半径,半径的改变取决于向心速度。运动速度v已知,所以向心速度是它的 ,又由于从顶点到中心的路程为边长的 ,所以时间t=( =a/v
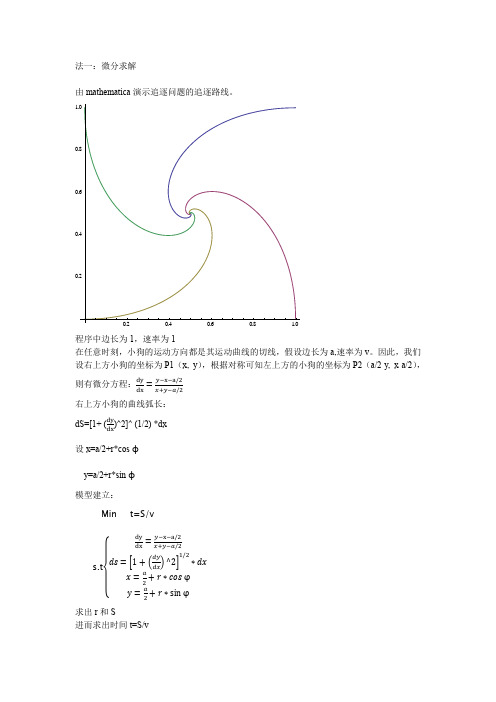
法一:微分求解
由mathematica演示追逐问题的追逐路线。
程序中边长为1,速率为1
在任意时刻,小狗的运动方向都是其运动曲线的切线,假设边长为a,速率为v。因此,我们设右上方小狗的坐标为P1(x,y),根据对称可知左上方的小狗的坐标为P2(a/2-y, x-a/2),则有微分方程:
右上方小狗的曲线弧长:
飞机追击问题数学建模

飞机追击问题飞机追击问题摘要本文讨论的是关于我方飞机追及不明敌机的问题。
其大概的思路是建立平面直角坐标系,建立微分方程模型,得到一个二阶方程, 通过降阶法化为一阶方程,使用微分思想,推导出所求的方程表达式,因而得到我方飞机追击敌机的轨迹方程。
通过分析假设敌我双方飞机形成固定夹角下在不同时刻下双方的位置,进而推导出求解公式。
关键词:追击、平面直角坐标系、微分方程、降阶法1. 问题重述:我军飞机在基地巡航飞行时,发现正北方向120 km 处有一敌机以90 km/h 的速度向正东方向行驶. 我方飞机立即追击敌机, 我方飞机速度为450 km/h ,自动导航系统使飞机在任一时刻都能对准敌机。
求出我飞机在何时何处能拦截敌机以及当敌机以135km/h 的速度与我飞机成固定夹角的方向逃逸时,我方飞机在何时何处能拦截敌机。
2. 模型假设1.假设我方飞机以及敌机的运动为质点运动。
2.假设双方飞机为匀速率运动。
3.假设飞机的运动速度跟风速和空气阻力没有关系,但是实际飞机运动过程中阻力影响和飞行速度有关系。
在运动的过程中也忽略了重力的影响。
3. 符号说明:Ve :敌机飞行速度。
Vw :我方飞机飞行速度。
O :我方飞机初始位置。
A :敌机初始位置。
B :我方飞机机追击到敌机的位置。
S :两机初始位置之间的距离。
4.问题的分析:我方飞机在追击的过程中始终指向敌机,即我方飞机的飞行方向随着时间的改变而改变,建立起平面直角坐标系有(图1)5.模型的建立5.1. 问题1:当t = 0时,我方飞机位于点O ,敌机位于(0,A)点。
设我方飞机在t 时刻的位置为P (x,y)。
飞机速度恒定,则有xt v y S dxdy e --=由于我方飞机飞行轨迹的切线方向必须指向敌机,即直线PM 的方向就是飞行轨迹上点P 的切线方向,故有τn T yd xd n n =),(5.2.问题2:如果敌机以135km/h 速度与我巡航飞机方向成固定夹角方向逃逸,设逃逸方向与我方飞机速度方向夹角为θ,如图2建立坐标y(0,SOx图26. 模型的求解:6.1.问题1求解过程:建立微分方程模型,通过降阶法化把推导出的二阶方程转为一阶方程,然后用分离变量法求解。
数模——追逐潜艇问题
驱逐舰在黑夜中搜索潜艇, 据雷达测量发现潜艇在正北三公里处,但潜艇立 即下潜。 已知潜艇下潜后立即朝某个方向直线行驶,且驱逐舰的速度是潜艇速度 的 2 倍。问驱逐舰应采取何种路线追逐,才能保证它能开到潜艇的正上方?
2. 问题的分析
该问题是现实生活中军事领域内一个十分实际的问题, 具有一定的现实意义。 我们针对这一问题,采用质点运动模型,在直角坐标系中用解析几何法,利 用恒成立问题的求解方法,对该问题进行了研究,得出了驱逐舰应当按照螺 旋线行进的追逐方法。
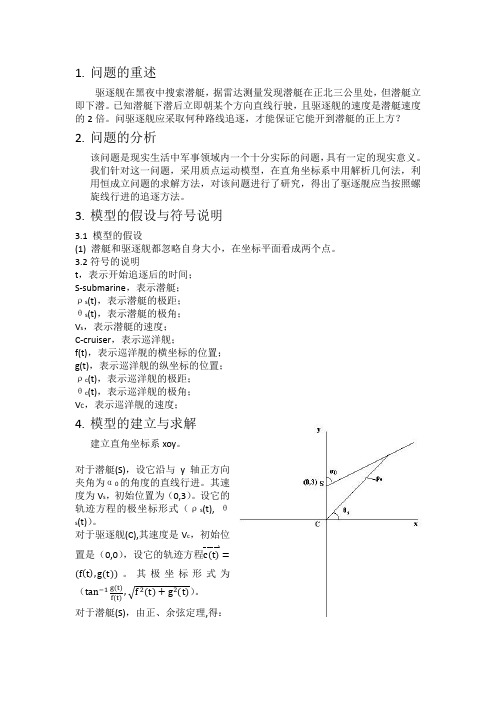
4. 模型的建立与求解
建立直角坐标系 xoy。 对于潜艇(S),设它沿与 y 轴正方向 夹角为α 0 的角度的直线行进。其速 度为 Vs,初始位置为(0,3) 。设它的 轨迹方程的极坐标形式( ρ s(t), θ 。 s(t)) 对于驱逐舰(C),其速度是 Vc,初始位 置 是 ( 0,0 ) ,设它的轨迹方程 c t = (f t , g(t))。其极坐标形式为 (tan−1 f(t) , f 2 t + g 2 (t)) 。 对于潜艇(S),由正、余弦定理,得:
2 2
+ ρ c(t)
− 2 ∙ ρ s(t) ∙ ρ c(t)
该题转换为,对于任意的α 0,存在 f(t),g(t),使得 d 恒等于 0。 由此解出: f(t)= Vs t sin α0 g(t)=3+Vs t cos α0
5.ห้องสมุดไป่ตู้模型的结果分析
有上述的模型求解结果,得出该驱逐舰应当首先前行到(0,3)处,接着按照螺旋线 行进。
g(t)
ρ s(t) Vs t = π π sin(2 − α0 ) sin(2 − θ s(t)) π 32 + ρ s(t)2 − (Vc t)2 cos( − θ s(t)) = 2 2 × 3 × ρ s(t) 求出ρ s(t),sin(θ s(t)),cos(θ s(t)). 由驱逐舰的轨迹方程和极坐标方程得出: ρ c(t),sin(θ c(t)),cos(θ c(t)). 又两者的距离: d= ρ s(t)
四人追击问题
一、题目:在边长为a的正方形的四个顶点上各有一人,如图12.12所示,在某一时刻,四个人同时出发以匀速v按顺时针方向追赶下一个人,如果他们始终对准目标,试确定每个人的行进路线,计算每个人跑过的路程和经历的时间。
图12.12二、假设约定约定速度v=1m/s,边长a=1m三、模型建立以dt为时间间隔,每个人一步一步地走动,直到每两个人之间的距离都足够小为止。
这时,便可以通过条件及追击规律,实时计算出题中4个人的位置。
假定一个人从B0点运动到B1点,另一个人沿向量AB1方向运动。
此时B1运动到B2处,A再沿A1B2的方向运动,以此类推。
直到两人间的距离足够小,其他相邻两人之间的运动均与此同理。
四、模型求解用MATLAB求解hold onaxis([0 1 0 1]);gridA=[0,0];B=[0,1];C=[1,1];D=[1,0];d=norm(A-B);k=0;t=0;s=0;v=1;dt=0.001;K=1;while k<1000k=k+1;t=t+dt;s=s+dt*v;plot(A(1),A(2),'b.','markersize',15);plot(B(1),B(2),'b.','markersize',15);plot(C(1),C(2),'b.','markersize',15);plot(D(1),D(2),'b.','markersize',15);e1=B-A;d=norm(e1);e2=C-B;e3=D-C;e4=A-D;fprintf('k=%.0f d=%.3f t=%.3f s=%.4f\n',k,d,t,s) if d<=0.0001breakende1=e1/d;e2=e2/d;e3=e3/d;e4=e4/d;A=A+K*v*dt*e1;B=B+K*v*dt*e2;C=C+K*v*dt*e3;D=D+K*v*dt*e4;pause(0.0001)end五、结果分析……k=495 d=0.016 t=0.990 s=0.9900k=496 d=0.014 t=0.992 s=0.9920k=497 d=0.013 t=0.994 s=0.9940k=498 d=0.011 t=0.996 s=0.9960k=499 d=0.009 t=0.998 s=0.9980k=500 d=0.007 t=1.000 s=1.0000结果表明,四人在1.000s后相遇,每个人跑过的路程是1.0000m。
数学建模 四人追击问题 论文
一、对《数学实践与建模》课程的讲义、授课内容、授课方式等的看法、建议:还没开始上这门课的时候,我就经常听到数学建模这个词,谁谁谁参加数学建模比赛了之类的。
当时并没有多想,感觉数学建模什么的估计就是类似奥数竞赛一类的解难题吧。
没想到这学期开了这门课,通过这门课让我对数学建模有了一个更清晰直观的认识。
这么几周的课上下来,我觉得这门课还是很有意思的,对于这门课,我有一下一些建议:1、第一节课可以先去机房上一次实验课,让大家先试试手,这样利于后期课堂教学的开展;2、可以建立一个QQ群,让大家相互讨论,这样也可以充分利用好那些有数学建模基础同学的资源;3、大家自己弄MATLAB软件不是太方便,希望学校或者老师在软件的获取上给予一定的帮助;4、实验课的时候进行分组,一个基础好的同学和几个没什么基础的同学为一组,这样可以提高整个小组成员的学习效率。
有的建议可能不好实施,所以以上是我从个人想法观点出发的几点小建议。
二、题目:四人追逐实验三、摘要:这是一个关于动态追击的问题,每个人都在运动,而且每个人的运动状态是相同的。
问题主要在于,每个人的运动状态都在时时刻刻改变着,这是分析这个问题的关键点。
通过初步判断,四个人最终会相遇在同一点,并且四个人的运动具有对称性,我们可以通过使追及过程离散化的方法来模拟四人的追及过程,即以极短的时间段为间隔,逐步分析四人的运动状况。
四、问题重述:在正方形ABCD的四个顶点各有一个人。
设在初始时刻时,四人同时出发匀速以沿顺时针走向下一个人。
如果他们始终对准下一个人为目标行进,最终结果会如何。
作出各自的运动轨迹。
五、模型假设:1、将四个人看成质点a、b、c、d,设他们的初始位置分别为(0,0)(即坐标原点O)、 (0,1)、 (1,1)、 (1,0),如图1所示。
2、假设某人追上其目标的要求是该者与其目标间的距离足够小。
我们不妨将该临界距离设为0.005个单位(该值为初始距离的0.5%)。
追逐问题——精选推荐
追逐问题1.1猎狗追兔1.1.1题型说明猎狗追兔问题与普通的追击问题的差别主要是,猎狗追兔问题中的速度不是具体的数值,⽽是通过步长和步频来表⽰,追击距离也是以步长来表⽰。
步长和步频也都是以⼀个物体为参考,表述另⼀个物体。
1.1.2学习要领整体解题思路是将两种动物步长转换为长度单位,步频转换为时间单位,然后得到两种动物的速度,如果距离条件是通过步长来表⽰的,再将表⽰为距离的步长转换为长度单位。
1.始终牢记追击(相遇)的条件是时间相同;1.1.3例题讲解例题1:猎⽝发现在离它10⽶远的前⽅有⼀只奔跑着的野兔,马上紧追上去,猎⽝的步⼦⼤,它跑5步的路程,兔⼦要跑9步,但是兔⼦的动作快,猎⽝跑2步的时间,兔⼦却要跑3步。
猎⽝⾄少跑多少⽶才能追上兔⼦?(60⽶,)【解析】假设⼀个长度单位的猎⽝跑5步,兔⼦跑9步,则说明猎⽝每步1/5长度单位,兔⼦每步为1/9个长度单位;假设⼀个时间单位内猎⽝跑2步,兔⼦跑3步,则每个时间单位内猎⽝跑的距离为2×1/5=2/5,兔⼦跑的距离为3×1/9=1/3;那么猎⽝和兔⼦的速度差是2/5-1/3=1/15,路程差除以速度差就是追击时间为10÷1/15=150,在这个时间内猎⽝跑出的路程为2/5×150=60⽶。
例题2:猎⼈带着猎⽝去打猎,发现兔⼦的瞬间(此时猎⼈、猎⽝、兔⼦位于同⼀点上),猎⼈迟疑了⼀下才发出了让猎⽝追捕的命令,这时兔⼦已经跑出了6步。
已知猎⽝的步⼦⼤,它跑5步的路程,兔⼦要跑9步;但兔⼦动作快,猎⽝跑2步的时间,兔⼦能跑3步。
那么猎⽝跑多少步才能追上兔⼦?(20步)【解析】兔⼦跑出6步相当于1/9×6=2/3个长度单位,那么追击时间为2/3÷1/15=10个时间单位,根据猎狗⼀个时间单位跑2步,10个时间单位应该跑出10×2=20步。
例题3:⼀只猎狗正在追赶前⽅2⽶的兔⼦,已知猎狗每步跑0.3⽶,兔⼦每步跑0.21⽶,猎狗跑3步的时间兔⼦可以跑4步,问:兔⼦跑出去多远才被猎狗追上?(7⽶)【解析】猎狗单位时间内跑出0.3×3=0.9⽶,兔⼦单位时间内跑出0.21×4=0.84⽶,速度差为0.9-0.84=0.06⽶,距离差为20⽶,那么追击时间为2÷0.06=100/3,兔⼦跑出的距离为0.21×100/3=7⽶。
五角星追逐问题数学建模
数学建模答卷1. 摘要:C题:追踪问题(1)一只兔子在O点处,它的洞穴在正北20米的B点处,一只狼位于兔子正东33米的A点处。
此刻,兔子迅速向洞口奔跑,而狼紧盯着兔子追击。
已知狼的速度是兔子速度的2倍,问:当兔子到达洞口前是否会被狼逮住?画出狼追击兔子的追逐曲线。
(2)在5角星的5个顶点A、B、C、D、E处各有一人,顶点距5角星的中心O的距离为1个单位。
在某一时刻5人同时出发,以匀速v 走向顺时针方向的下一人,且他们的方向始终保持对准目标。
请画出每个人的行走轨迹。
(2)条件同(2)。
如果5人的速率分别为1v、1.1v、1.2v、1.3v和1.4 v,在这种情况下每个人的行走轨迹如何,他们在何处汇集?2 . 数学模型第一小问狼追踪兔子一题设坐标系如下,取狼的出发点为原点0(0,0)。
x轴指向正北方向,y轴指向正东方向。
当t=0时,狼位于O ,兔子位于点(0,H ),(H=33m )设狼t 时刻的位置为P ()(),(t y t x ),由题意,(式一)其中Vw=2Vg另外在t 时刻,兔子位置应该为),(H t M v e ,v e 。
由于狼追踪轨迹的切线方向必须指向兔子,即直线PM 的方向就是导弹轨迹上点P 的切线方向,故有xt yH dx dy v e --=(式二 ))(xy H dt dx dt dy v e --= (式三) 方程(式三)初值条件想 x (0)=0,y (0)=0 (4.4) 构成了一个关于时间变量t 的一阶微分方程组的初值问题。
由(式二)得x t y H dydxv e -=-)( 两边对t 求导得dt dxdt dy dy dx y H dtdy d x v y de-=⎪⎭⎫ ⎝⎛-+-)(22即有()v y de y H dtdyd x =-22把(式一)写为12+=⎪⎪⎭⎫ ⎝⎛dy dx v edtdy 代入上式,就得到轨迹方程。
这是一个二阶非线性微分方程,加上初值条件,则初值问题()⎪⎪⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎪⎪⎨⎧==+-==⎪⎪⎭⎫ ⎝⎛dy dx x v v dy dx y d y y we y H d x 0022211 上式分别为(式五),(式六),(式七)。
数学建模第三次作业——追击问题
数学建模实验报告机械工程及自动化75班07011114丁鑫四人追击问题问题:在一个边长为1的正方形跑道的四个顶点上各站有一人,他们同时开始以等速顺时针追逐下一人,在追逐过程中,每个人时刻对准目标,试模拟追击路线。
并讨论:(1) 四个人能否追到一起?(2)若能追到一起,则每个人跑过多少路程?(3)追到一起所需要的时间(设速率为1)?(4)如果四个人追逐的速度不一样,情况又如何呢分析:先建立坐标系,设计程序使从A,B,C,D 四个点同时出发,画出图形并判断。
程序设计流程:四个人追击的速度相等,则有14321=====v v v v v 。
针对这种情形,可有以下的程序。
hold onaxis([0 2 0 2]);gridA=[0,0];B=[0,1];C=[1,1];D=[1,0];k=0;s1=0;s2=0;s3=0;s4=0; %四个人分别走过的路程t=0;v=1;dt=0.002;while k<10000k=k+1;plot(A(1),A(2),'r.','markersize',15);plot(B(1),B(2),'b.','markersize',15);plot(C(1),C(2),'m.','markersize',15);plot(D(1),D(2),'k.','markersize',15);e1=B-A;d1=norm(e1);e2=C-B;d2=norm(e2);e3=D-C;d3=norm(e3);e4=A-D;d4=norm(e4);fprintf('k=%.0f ',k)fprintf('A(%.2f,%.2f) d1=%.2f ',A(1),A(2),d1)fprintf('B(%.2f,%.2f) d2=%.2f ',B(1),B(2),d2)fprintf('C(%.2f,%.2f) d3=%.2f ',C(1),C(2),d3)fprintf('D(%.2f,%.2f) d4=%.2f\n',D(1),D(2),d4) A=A+v*dt*e1/d1;B=B+v*dt*e2/d2;C=C+v*dt*e3/d3;D=D+v*dt*e4/d4;t=t+dt;s1=s1+v*dt;s2=s2+v*dt;s3=s3+v*dt;s4=s4+v*dt;if norm(A-C)<=5.0e-3&norm(B-D)<=5.0e-3 breakendendts1s2s3s4部分运行结果:k=481 A(0.52,0.52) d1=0.04 B(0.52,0.48) d2=0.04 C(0.48,0.48) d3=0.04 D(0.48,0.52) d4=0.04 k=482 A(0.52,0.52) d1=0.04 B(0.52,0.48) d2=0.04 C(0.48,0.48) d3=0.04 D(0.48,0.52) d4=0.04 k=483 A(0.52,0.52) d1=0.04 B(0.52,0.48) d2=0.04 C(0.48,0.48) d3=0.04 D(0.48,0.52) d4=0.04k=484 A(0.52,0.51) d1=0.04 B(0.51,0.48) d2=0.04 C(0.48,0.49) d3=0.04 D(0.49,0.52) d4=0.04 k=485 A(0.52,0.51) d1=0.04 B(0.51,0.48) d2=0.04 C(0.48,0.49) d3=0.04 D(0.49,0.52) d4=0.04 k=486 A(0.52,0.51) d1=0.03 B(0.51,0.48) d2=0.03 C(0.48,0.49) d3=0.03 D(0.49,0.52) d4=0.03 k=487 A(0.52,0.51) d1=0.03 B(0.51,0.48) d2=0.03 C(0.48,0.49) d3=0.03 D(0.49,0.52) d4=0.03 k=488 A(0.52,0.51) d1=0.03 B(0.51,0.48) d2=0.03 C(0.48,0.49) d3=0.03 D(0.49,0.52) d4=0.03 k=489 A(0.52,0.51) d1=0.03 B(0.51,0.48) d2=0.03 C(0.48,0.49) d3=0.03 D(0.49,0.52) d4=0.03 k=490 A(0.52,0.50) d1=0.03 B(0.50,0.48) d2=0.03 C(0.48,0.50) d3=0.03 D(0.50,0.52) d4=0.03 k=491 A(0.52,0.50) d1=0.02 B(0.50,0.48) d2=0.02 C(0.48,0.50) d3=0.02 D(0.50,0.52) d4=0.02 k=492 A(0.52,0.50) d1=0.02 B(0.50,0.48) d2=0.02 C(0.48,0.50) d3=0.02 D(0.50,0.52) d4=0.02 k=493 A(0.51,0.50) d1=0.02 B(0.50,0.49) d2=0.02 C(0.49,0.50) d3=0.02 D(0.50,0.51) d4=0.02 k=494 A(0.51,0.50) d1=0.02 B(0.50,0.49) d2=0.02 C(0.49,0.50) d3=0.02 D(0.50,0.51) d4=0.02 k=495 A(0.51,0.50) d1=0.02 B(0.50,0.49) d2=0.02 C(0.49,0.50) d3=0.02 D(0.50,0.51) d4=0.02 k=496 A(0.51,0.50) d1=0.01 B(0.50,0.49) d2=0.01 C(0.49,0.50) d3=0.01 D(0.50,0.51) d4=0.01 k=497 A(0.51,0.49) d1=0.01 B(0.49,0.49) d2=0.01 C(0.49,0.51) d3=0.01 D(0.51,0.51) d4=0.01 k=498 A(0.51,0.49) d1=0.01 B(0.49,0.49) d2=0.01 C(0.49,0.51) d3=0.01 D(0.51,0.51) d4=0.01 k=499 A(0.50,0.49) d1=0.01 B(0.49,0.50) d2=0.01 C(0.50,0.51) d3=0.01 D(0.51,0.50) d4=0.01 k=500 A(0.50,0.50) d1=0.01 B(0.50,0.50) d2=0.01 C(0.50,0.50) d3=0.01 D(0.50,0.50) d4=0.01 k=501 A(0.50,0.50) d1=0.01 B(0.50,0.50) d2=0.01 C(0.50,0.50) d3=0.01 D(0.50,0.50) d4=0.01 k=502 A(0.50,0.50) d1=0.00 B(0.50,0.50) d2=0.00 C(0.50,0.50) d3=0.00 D(0.50,0.50) d4=0.00 t =1.0040s1 =1.0040s2 =1.0040s3 =1.0040s4 =1.0040从运行的结果来看,如果四个人的追击速度相同,均为1,可有以下的结果:(1) 四人最后可以追到一起。
数学建模大作业_操场追及问题

2
由于小明室友从中心开始追小明,因此初始条件为 我们发现,由于没有小明的位置与时间的关系,因此我们无法求出上述微分方程的 解。因此,接下来我们应该尝试建立 X 与 Y 关于时间的表达式。 引入椭圆的参变量方程, 给出 X 和 Y 关于参变量 的表达式:X a cos , Y b sin . 而 得: ,由于小明速度为 1,因此在时间 t 内小明走过的弧长为 t ,依据弧长公式可
图1
图2
3
36.5 400 ,模仿椭圆的概念, c a 2 b2 36.5 85 36.5 长轴 a 短轴 b 36.5 .可以计算出离心率为 e 0.89 , 79 , a a 2 查阅椭圆周长计算公式 , 将以上两式联立方程组可以求得建模后椭圆 长轴及短轴的值。解得 a 79.35, b 36.18.
参考《田径场地设施标准手册 1999》 ,我们得到 400m 跑道的设计标准如下:大多数 适宜的 400 米椭圆跑道被建成弯道半径为 35.00m 到 38.00m 之间,最好的是 36.50m , 国际田联建议所有新造的跑道应该按后者的规定建造,并被称之为“400 米标准跑道” , 图 1 给出了实际的 400m 跑道设计图,图 2 是根据标准手册简化的 400m 跑道图。
1
一、问题重述
小明在平面上沿 400 周长的操场(可考虑为椭圆)以恒定的速率 v=1 跑步。 他的室友从操场中心出发,以恒定速率 w 跑向小明,室友的跑步的方向始终指向小 明。讨论 w 大约为多大时,室友能追上小明,做出轨迹图,并讨论追上的时间。
二、问题分析
本题是一个追及问题,追及问题的三个要素是路程、速度和时间,在此题中时间为 未知量,速度大小的给出方式常规,因此此题的关键就在于速度方向的模型化。 为解决此问题,我们提出了两个模型,第一个为从实际跑道中抽象化的椭圆轨道模 型,第二个为实际 400m 跑道模型。 在一个模型中,我们采取了速度分解的方法。将系统置于平面直角坐标系中,设出 小明和他室友的位置坐标,连线方向即为舍友下一时刻的运动方向,也即速度的方向, 通过在水平和竖直两个方向的分解,可以得出室友横坐标与纵坐标随着时间变化的微分 方程。此微分方程包含小明的位置坐标,方程右侧并不是显含时间的,为解决这个问题 引入参变量 ,根据椭圆的参数方程将小明的位置坐标表示成 的函数,并依据弧长公 式将 表示成 t 的函数进而建立起完整的微分方程组,最后用 Matlab 进行数值模拟。 第二个模型利用了第一个模型速度分解的理论,唯一不同的是在给出小明位置坐标 时直接写出了位置与时间的显式分段表达式,进而建立了完整的微分方程组,并最终给 出了追及轨迹及数值结果。
三人追逐问题
Course Test of Mathematical Software(Part seven)Course Name:Test Time:Class Code:Student Number:Test Purpose: Try to master basic methods of symbol computation in arithmetic, linear algebra and differentiation and integration.Test Demand:Methods, steps and procedure should be clearly in your test report.Test Content:Pursuit problemThere three people at the three vertices of a regular triangle with sides of x0 m(Here x0 represents the last two digits of your student ID). The three people chase after each other with uniform motion (1m/s) in a clockwise direction.(1) Establishing the differential equation model, and plot the route.(2)Using computer simulation to solve this problem. Comparison your simulation results with (1) and tries to illustrate how to improve the simulation results.程序:clear;clc%建立坐标系和网格hold onaxis([0 39 0 39 ]);grid on;A=[0 0];B=[0 39];C=[39 39];%初始化三个人的距离d1=norm(A-B);d2=norm(B-C);d3=norm(C-A);%初始化循环变量和行走路程,速度设置时间微元初始化循环变量和行走路程,速度设置时间微元k=0;s=0;v=1;dt=0.2;%开始执行追击的循环体开始执行追击的循环体while k>-1k=k+1;plot(A(1),A(2),'r.','markersize',10);plot(B(1),B(2),'b.','markersize',10);plot(C(1),C(2),'g.','markersize',10);e2=C-B; d2=norm(e2);e3=A-C; d3=norm(e3);%设置追击结束的条件设置追击结束的条件if d1<=0.3breakende1=e1/d1;e2=e2/d2;e3=e3/d3;A=A+v*dt*e1;s=s+v*dt;B=B+v*dt*e2;C=C+v*dt*e3;pause(0.000000001)end%输出追击结束所用的时间和路程输出追击结束所用的时间和路程time=k*dts结果:time = 31.2000s = 31.0000clearclc[t,y]=ode45('fun',[0 21],[0 19.5*sqrt(3) -19.5 0 19.5 0]); plot(y(:,1),y(:,2),'-',y(:,3),y(:,4),'*',y(:,5),y(:,6),'-.') hold on% plot(y(:,1),y(:,2))function dy=fun(t,y)dy=zeros(6,1)dy(2)=1*(y(4)-y(2))/sqrt((y(1)-y(3)).^2+(y(2)-y(4)).^2);dy(3)=1*(y(5)-y(3))/sqrt((y(3)-y(5)).^2+(y(4)-y(6)).^2);dy(4)=1*(y(6)-y(4))/sqrt((y(3)-y(5)).^2+(y(4)-y(6)).^2);dy(5)=1*(y(1)-y(5))/sqrt((y(5)-y(1)).^2+(y(6)-y(2)).^2);dy(6)=1*(y(2)-y(6))/sqrt((y(5)-y(1)).^2+(y(6)-y(2)).^2);dy =05101520253035三人追逐问题在三角形的三个顶点上各有一人,该三角形的边长为你学号的后2位+10,在某一时刻,三人同时出发以匀速(1米/秒)按顺时针方向追赶下一个人,他们始终保持对准目标,(1) 建立微分方程模型,确定每个人的行进路线。
数学建模——老鹰追小鸟问题
数学建模——老鹰追小鸟问题问题描述假设一只小鸟在一维数轴上以恒定速度飞行,同时一只老鹰也开始在数轴上的某一点处以恒定速度追逐小鸟。
给定小鸟和老鹰的速度以及起始位置,请计算老鹰追上小鸟的时间。
数学模型设小鸟的速度为v_bird,老鹰的速度为v_eagle,小鸟的起始位置为a,老鹰的起始位置为b。
我们可以用以下的数学模型来解决这个问题:1. 假设小鸟和老鹰都以匀速行动。
2. 则小鸟的位置为 x = a + v_bird * t,老鹰的位置为 x = b +v_eagle * t。
3. 当小鸟和老鹰处于相同的位置时,即 a + v_bird * t = b +v_eagle * t,可以求出时间 t。
4. 若 t > 0,则老鹰追上小鸟;若 t <= 0,则老鹰无法追上小鸟。
解决方法根据上述的数学模型,我们可以用以下方法解决问题:1. 输入小鸟的速度v_bird,老鹰的速度v_eagle,小鸟的起始位置a,老鹰的起始位置b。
2. 计算时间t的值,通过求解方程 a + v_bird * t = b + v_eagle * t,即 t = (b - a) / (v_bird - v_eagle)。
3. 判断 t 的值,若 t > 0,则输出 "老鹰追上小鸟的时间为 t 秒";若 t <= 0,则输出 "老鹰无法追上小鸟"。
示例输入:小鸟速度 v_bird = 5老鹰速度 v_eagle = 8小鸟起始位置 a = 0老鹰起始位置 b = 20输出:老鹰追上小鸟的时间为 4 秒总结本文介绍了如何利用数学建模的方法解决了老鹰追小鸟的问题。
通过建立数学模型,我们可以得出追上时间的计算公式,并通过求解方程得出具体的时间值。
这个方法可以应用于类似的问题,只需要根据具体情况进行参数的设定和计算。
数学建模是解决实际问题的有力工具,可以帮助我们更好地理解和分析复杂的现象。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验追逐问题
Matlab程序如下:
%取v=1,t=12,A,B,C,D点的坐标分另为(0,10),(10,10),(10,0),(0, 0) v=1;
dt=0.05;
d=20;
x=[0 0 0 10 10 10 10 0];
x(9)=x(1);
x(10)=x(2);
hold
axis('equal')
axis([0 10 0 10]);
for k=1:2:7
plot(x(k),x(k+1),'.' )
end
while(d>0.1)
for i=1:2:7
d=sqrt((x(i)-x(i+1))^2+(x(i+1)-x(i+3))^2);
x(i)=x(i)+v*dt*(x(i+2)-x(i))/d;
x(i+1)=x(i+1)+v*dt*(x(i+3)-x(i+1))/d;
plot(x(i),x(i+1),'.')
end
x(9)= x(1);
x(10)= x(2);
end
hold
运行结果如下:
狼追击兔子的问题狼追击兔子问题是欧洲文艺复兴时代的著名人物达.芬奇提出的一个数学问题。
当一个兔子正在它的洞穴南面60码处觅食时,一只恶狼出现在兔子正东的100码处。
当两只动物同时发现对方以后,兔子奔向自己的洞穴,狼以快于兔子一倍的速度紧追兔子不放。
狼在追赶过程中所形成的轨迹就是追击曲线。
狼是否会在兔子跑回洞穴之前追赶上兔子?
为了研究狼是否能够追上兔子,可以先考虑求出狼追兔子形成的追击曲线,然后根据曲线来确定狼是否能够追上兔子。
可以对狼与兔子的追击过程通过计算机进行模拟,然后从模拟结果获取。
模拟程序如下,程序文件名sim_langtu.m:
function sim_langtu
%《狼兔追击问题》
%(离散模拟)
%这里没有具体考虑狼、兔的具体速度
%主要通过二者的速度倍速关系及方向向量奔跑过程
Q=[0 0];%兔子坐标
P=[100 0];%狼坐标
PQ=Q-P;%狼兔方向向量
step =1;%模拟步长:兔子奔跑的距离,step越小就越精确
count = 60/step;%以兔子的奔跑距离划分
PQ=PQ/norm(PQ)*step;%归一化,单位向量
trackP=P;
trackQ=Q;
for k=1:count;
P = P + 2*PQ;%2倍速度
Q = Q + step*[0 1];%[0 1]为兔子奔跑方向的单位方向向量
PQ = Q - P;
trackP(1+k,:)=P;
trackQ(1+k,:)=Q;
PQ=PQ/norm(PQ)*step;%归一化,单位向量
dis= sqrt(sum((P-Q).^2));
plot(trackP(:,1),trackP(:,2),'*',Q(1),Q(2),'rp',0,60,'r+' );
pause(0.5)
end%for
dis%兔子到达窝边时,狼兔之间的距离
P %兔子到达窝边时,狼的坐标
Q %兔子到达窝边时,兔子的坐标
(二)模拟程序运行结果
dis =
7.0619
P =
1.6805 53.1410
Q =
0 60
注:如果修改程序中的step赋值,则结果稍有不同。
程序结束后,输出狼兔的位置图如下。
通过下图可以直观的看到,当兔子回到窝边时,狼还与兔子有一段距离,这表示兔子成功逃脱。