同济大学2013考研自动控制原理真题
全国名校自动控制原理考研真题汇编(含部分答案)
2013年中国 学技术大学848 动控制原理
2014年中国 学技术大学848 动控制原理
5.北京
天大学 动控制原பைடு நூலகம் 合
2012年北京
天大学931 动控制原理 合
2013年北京
天大学931 动控制原理 合
2014年北京
天大学931 动控制原理 合
6.山东大学 动控制原理
2016年山东大学847 动控制原理(含现代控制理 )
8.其他院校自动控制原理考研 真题(含部分答案)
2010年华中科技大学829自动控制原理考研真 题及答案
2011年南京大学961自动控制原理考研真题
2011年重庆大学839自动控制原理一考研真题
2013年厦门大学844自动控制原理考研真题
2013年华南理工大学813自动控制原理考研真 题
2014年华南理工大学813自动控制原理考研真 题
2015年华南理工大学813自动控制原理考研真 题
2016年华南理工大学813自动控制原理考研真 题
2017年华南理工大学813自动控制原理考研真 题
2018年华南理工大学813自动控制原理考研真 题
2012年电子科技大学839自动控制原理考研真 题及详解
参 案:
2013年电子科技大学839自动控制原理考研真 题及详解
参 案:
2014年电子科技大学839自动控制原理考研真 题
4.中国科学技术大学自动控制 原理考研真题
2013年中国科学技术大学848自动控制原理考 研真题
6.山东大学自动控制原理考研 真题
2016年山东大学847自动控制原理(含现代控 制理论)考研真题
2017年山东大学847自动控制原理(含现代控 制理论)考研真题
自控考研真题、答案与详解
0)点可得:
20lg K = 0 ⇒ K = 1
转折处加入了一个二阶振荡环节,则开环传递函数可设为:
G(s) = 1 ⋅
ωn2
s s2 + 2ζωn s + ωn2
由转折点可知, ωn = 10rad/s 。
振荡环节在 ω = ωn 时的修正值为 −20 lg 2ζ 。由图知,修正值为 −10 − (−20) = 10 ,即:
2
网学天地()出品
版权所有,翻录必究!
−20lg 2ζ = 10 ⇒ ζ = 1 2 10
则传递函数为:
G(s) =
1⋅ s s2
ωn2 + 2ζωn s + ωn2
=
s(s2
+
100 10s + 100)
开环对数相频曲线如图 1-4 所示。
(2)由图可知,在 L(ω)>0dB 的范围内,对应的相频曲线对 −π 线无穿越,即 N+ = 0 ,
分别为输入和输出信号 u(t) 和 y(t) 的拉普拉斯变换。
解:由 L−1(sI − A)−1 = eAT ,可得:
(sI
−
A)−1
=
L(e AT
)
=
L
⎡e−t + te−t
⎢ ⎣
−te−t
te−t e−t − te−t
⎤ ⎥ ⎦
=
⎡ ⎢ ⎢ ⎢ ⎢⎣
s
1+ +1 −
(s
1 (s + 1)2
1 + 1)2
s3 1 10
s2 11 10
s1 100/11 0
s0 10 第一列系数均大于 0,故系统稳定。
系统稳定,输入信号拉氏变换为 R(s) = 1 ,故由输入信号引起的误差象函数在 s 右边平面 s2
《自动控制原理》试卷及答案(a6套)
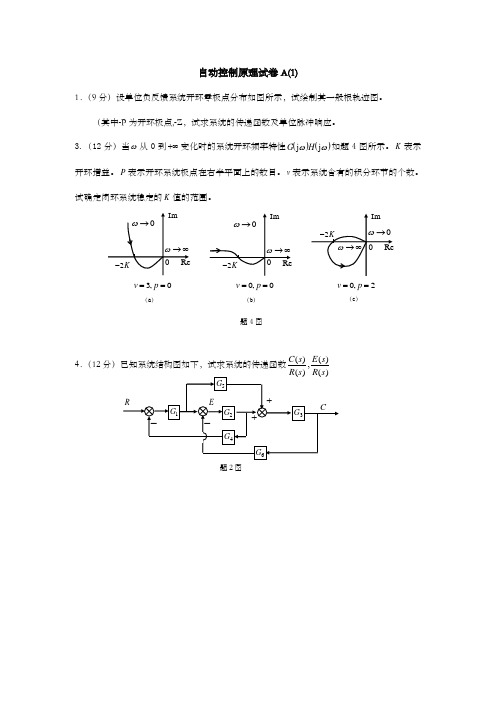
自动控制原理试卷A(1)1.(9分)设单位负反馈系统开环零极点分布如图所示,试绘制其一般根轨迹图。
(其中-P 为开环极点,-Z ,试求系统的传递函数及单位脉冲响应。
3.(12分)当ω从0到+∞变化时的系统开环频率特性()()ωωj j H G 如题4图所示。
K 表示开环增益。
P 表示开环系统极点在右半平面上的数目。
v 表示系统含有的积分环节的个数。
试确定闭环系统稳定的K 值的范围。
4.(12分)已知系统结构图如下,试求系统的传递函数)(,)(s E s C,3==p v (a ),0==p v (b )2,0==p v (c )题4图题2图5.(15分)已知系统结构图如下,试绘制K 由0→+∞变化的根轨迹,并确定系统阶跃响应分别为衰减振荡、单调衰减时K 的取值范围。
6.(15分)某最小相位系统用串联校正,校正前后对数幅频特性渐近线分别如图中曲线(1)、(2)所示,试求校正前后和校正装置的传递函数)(),(),(21s G s G s G c ,并指出Gc (S )是什么类型的校正。
7.(15分)离散系统如下图所示,试求当采样周期分别为T=0.1秒和T=0.5秒输入)(1)23()(t t t r ⋅+=时的稳态误差。
8.(12分)非线性系统线性部分的开环频率特性曲线与非线性元件负倒数描述曲线如下图所示,试判断系统稳定性,并指出)(1x N和G (j ω)的交点是否为自振点。
参考答案A(1)1、 根轨迹略,2、 传递函数)9)(4(36)(++=s s s G ;单位脉冲响应)0(2.72.7)(94≥-=--t ee t c tt 。
3、 21,21,21><≠K K K 4、6425316324215313211)()(G G G G G G G G G G G G G G G G G G s R s C ++++= 642531632421653111)()(G G G G G G G G G G G G G G G G G s R s E +++-= 5、 根轨迹略。
自动控制原理试卷1(含答案)
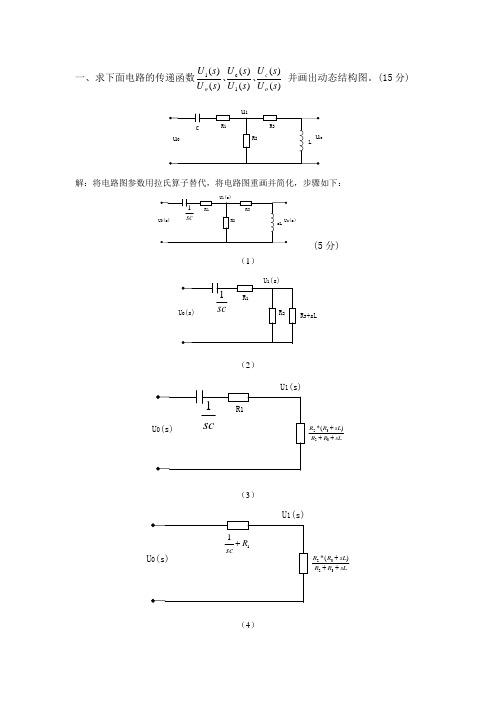
一、求下面电路的传递函数)()()()()()(1c 1s U s U s U s U s U s U o c o 、、并画出动态结构图。
(15分)解:将电路图参数用拉氏算子替代,将电路图重画并简化,步骤如下:(s)(5分)(1)R 3+sL(2)sLR R sL R R +++3232)(*(3)U 1(s)sLR R sL R R +++3232)(*(4)所以: 132323232011)(*)(*)()(R scsL R R sL R R sL R R sL R R s U s U ++++++++=(5分) 31)()(R sL sLs U s U c +=132323232301101)(*)(**)()(*)()()()(R scsL R R sL R R sL R R sL R R R sL sLs U s U s U s U s U s U c c +++++++++==系统的动态结构图为: (5分)本题考查要点: 电路图的数学模型和传递函数的关系,动态传递函数及结构图画法。
包含简单的电路简化过程。
二、对系统结构图进行简化并写出系统的开环传递函数、闭环传递函数、误差传递函数。
(15分)解:对结构图的简化过程如下:(10分)(1)(2)(3)(4)(5)所以系统的开环传递函数为:(5分)12151234323431)(*1)(H G G G G G H G G H G G G s G K ++++=121512343234312151234323431)(*111)(*1)(H G G G G G H G G H G G G H G G G G G H G G H G G G s G B +++++++++=12151234323431)(*111)()()(H G G G G G H G G H G G G s R s E s G E +++++==本题考查要点:结构图的简化方法(信号分支点和汇合点的移动、环节的合并)、几种传递函数的表示法。
自动控制原理试卷含答案4套完整(免费)
课程名称: 自动控制理论 (A/B 卷 闭卷)试卷A一、填空题(每空 1 分,共15分)1、反馈控制又称偏差控制,其控制作用是通过 与反馈量的差值进行的。
2、复合控制有两种基本形式:即按 的前馈复合控制和按 的前馈复合控制。
3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为 (用G 1(s)与G 2(s) 表示)。
4、典型二阶系统极点分布如图1所示,则无阻尼自然频率=n ω ,阻尼比=ξ ,该系统的特征方程为 ,该系统的单位阶跃响应曲线为 。
5、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s)为 。
6、根轨迹起始于 ,终止于 。
7、设某最小相位系统的相频特性为101()()90()tg tg T ϕωτωω--=--,则该系统的开环传递函数为 。
8、PI 控制器的输入-输出关系的时域表达式是 , 其相应的传递函数为 ,由于积分环节的引入,可以改善系统的 性能。
二、选择题(每题 2 分,共20分)1、采用负反馈形式连接后,则 ( )A 、一定能使闭环系统稳定;B 、系统动态性能一定会提高;C 、一定能使干扰引起的误差逐渐减小,最后完全消除;D 、需要调整系统的结构参数,才能改善系统性能。
2、下列哪种措施对提高系统的稳定性没有效果 ( )。
A 、增加开环极点;B 、在积分环节外加单位负反馈;C 、增加开环零点;D 、引入串联超前校正装置。
3、系统特征方程为 0632)(23=+++=s s s s D ,则系统 ( )A 、稳定;B 、单位阶跃响应曲线为单调指数上升;C 、临界稳定;D 、右半平面闭环极点数2=Z 。
4、系统在2)(t t r =作用下的稳态误差∞=ss e ,说明 ( )A 、 型别2<v ;B 、系统不稳定;C 、 输入幅值过大;D 、闭环传递函数中有一个积分环节。
同济大学车辆工程研究所考试08试题自动控制理论试卷

9.给定开环传函,让根据奈氏稳定判据来判断稳定性.通过改变开环传函的K来确定对稳定性的影响.
10.证明(TS+1)/(TS+1)(TS+1)的跟轨迹是圆.
11.说明李氏判据的意义.为什么提出.
1.简答,给了个简单的模型,让你说出反馈的作用.并画出方框图
2.画出一简单G(s)的跟轨迹,然后加入PI 后分析对跟轨迹的影响.再根据跟轨迹的图来确定调节时间之类的参数.
3.常规的零阶保持器的Z变换.通过K T 的不同来求稳态误差.(要先判断稳定性再求值)
4.给出传递函数,写出对角型和标准型的状态空间表达式.画出状态空间图.然后进行极点配置,并画出图形.
5.给定传函,然后进行校正.用到了串联超前和串联滞后校正.串连校正只给了对相角的要求,没给W的要求.
பைடு நூலகம்
6.给定非线性的传递函数图形,写出非线型的传递函数,然后画出它的 "e导---e "图形.再串联(TS+1)后判断其产生的影响.
7.一阶1/TS+1的输出响应,给定参数来确定T.
8.给定二阶G(S),来确定超调量和调节时间.
2013上海交大自控原理真题

上 海 交 通 大 学二〇一三年攻读硕士学位研究生入学考试试题考试科目: 自动控制原理注意:答案必须写在答题纸上,写在试卷或草稿纸上均无效。
1.(10分)系统结构如下图所示,求系统的超调量%σ和调节时间s t 。
2.(10分)求图1所示无源网络的运动方程和传递函数,图中电压1()u t 和2()u t 分别为输入量和输出量。
2()t 3.(15分)已知系统的结构如图所示,其中(0.51)()(1)(21)k s G s s s s+=++,输入信号为单位斜坡函数,求系统的稳态误差。
分析能否通过调节增益 k4.(15分)设负反馈系统如图2 ,前向通道传递函数为10()(2)G s s s =+,若采用测速负反馈()1s H s k s =+,试画出以s k 为参变量的根轨迹(10分),并讨论s k 大小对系统性能的影响(6分)。
5.(20分)已知一控制系统的结构图如下,1)确定该系统在输入信号()1()r t t =下的时域性能指标:超调量%σ,调节时间s t 和峰值时间p t ;2)当()21(),()4sin 3r t t n t t =⋅=时,求系统的稳态误差。
6.(20分)某火炮指挥系统结构如下图所示,()(0.21)(0.51)K G s s s s =++系统最大输出速度为2 r/min,输出位置的容许误差小于2o ,求:1)确定满足上述指标的最小K 值,计算该K 值下的相位裕量和幅值裕量;2)前向通路中串联超前校正网络0.41()0.081c s G s s +=+,试计算相位裕量。
7.(20分)设单位负反馈控制系统的开环传递函数为2()(2)(1)o K G s s s s s =+++,试确定使系统稳定的K 的取值范围。
如果想让闭环极点位于1s =-之左,K 应取何值。
8. (20分) 设单位负反馈系统开环传递函数如下,试概略绘出相应的闭环根轨迹图,并确定分离点坐标d 和临界增益K c 。
考研自动控制原理习题集及其解答

自动控制原理习题及其解答第一章(略) 第二章例2-1 弹簧,阻尼器串并联系统如图2-1示,系统为无质量模型,试建立系统的运动方程。
解:(1) 设输入为y r ,输出为y 0。
弹簧与阻尼器并联平行移动。
(2) 列写原始方程式,由于无质量按受力平衡方程,各处任何时刻,均满足∑=0F ,则对于A 点有021=-+K K f F F F其中,F f 为阻尼摩擦力,F K 1,F K 2为弹性恢复力。
(3) 写中间变量关系式220110)()(y K F Y Y K F dty y d f F K r K r f =-=-⋅=(4) 消中间变量得 020110y K y K y K dtdy f dt dy f r r=-+- (5) 化标准形 r r Ky dtdyT y dt dy T +=+00 其中:215K K T +=为时间常数,单位[秒]。
211K K K K +=为传递函数,无量纲。
例2-2 已知单摆系统的运动如图2-2示。
(1) 写出运动方程式 (2) 求取线性化方程 解:(1)设输入外作用力为零,输出为摆角θ ,摆球质量为m 。
(2)由牛顿定律写原始方程。
h mg dtd l m --=θθsin )(22其中,l 为摆长,l θ 为运动弧长,h 为空气阻力。
(3)写中间变量关系式)(dtd lh θα= 式中,α为空气阻力系数dtd l θ为运动线速度。
(4)消中间变量得运动方程式0s i n 22=++θθθmg dt d al dtd ml (2-1)此方程为二阶非线性齐次方程。
(5)线性化由前可知,在θ =0的附近,非线性函数sin θ ≈θ ,故代入式(2-1)可得线性化方程为022=++θθθmg dt d al dtd ml 例2-3 已知机械旋转系统如图2-3所示,试列出系统运动方程。
解:(1)设输入量作用力矩M f ,输出为旋转角速度ω 。
(2)列写运动方程式f M f dtd J+-=ωω式中, f ω为阻尼力矩,其大小与转速成正比。
自动控制原理试题库20套和答案详解
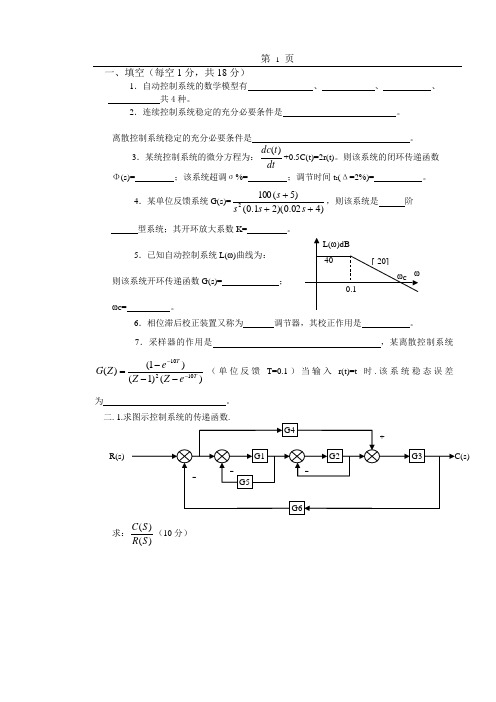
第 1 页一、填空(每空1分,共18分)1.自动控制系统的数学模型有 、 、 、共4种。
2.连续控制系统稳定的充分必要条件是 。
离散控制系统稳定的充分必要条件是 。
3.某统控制系统的微分方程为:dtt dc )(+0.5C(t)=2r(t)。
则该系统的闭环传递函数 Φ(s)= ;该系统超调σ%= ;调节时间t s (Δ=2%)= 。
4.某单位反馈系统G(s)=)402.0)(21.0()5(1002+++s s s s ,则该系统是 阶 型系统;其开环放大系数K= 。
5.已知自动控制系统L(ω)曲线为:则该系统开环传递函数G(s)= ;ωC = 。
6.相位滞后校正装置又称为 调节器,其校正作用是 。
7.采样器的作用是 ,某离散控制系统)()1()1()(10210TT e Z Z e Z G -----=(单位反馈T=0.1)当输入r(t)=t 时.该系统稳态误差为 。
二. 1.求:)()(S R S C (10分)R(s)第2页2.求图示系统输出C(Z)的表达式。
(4分)四.反馈校正系统如图所示(12分)求:(1)K f=0时,系统的ξ,ωn和在单位斜坡输入下的稳态误差e ss.(2)若使系统ξ=0.707,k f应取何值?单位斜坡输入下e ss.=?第 3 页(1) (2) (3)五.已知某系统L (ω)曲线,(12分)(1)写出系统开环传递函数G (s ) (2)求其相位裕度γ(3)欲使该系统成为三阶最佳系统.求其K=?,γmax =?六、已知控制系统开环频率特性曲线如图示。
P 为开环右极点个数。
г为积分环节个数。
判别系统闭环后的稳定性。
第 4 页七、已知控制系统的传递函数为)1005.0)(105.0(10)(0++=s s s G 将其教正为二阶最佳系统,求校正装置的传递函数G 0(S )。
(12分)一.填空题。
(10分)1.传递函数分母多项式的根,称为系统的2. 微分环节的传递函数为3.并联方框图的等效传递函数等于各并联传递函数之4.单位冲击函数信号的拉氏变换式5.系统开环传递函数中有一个积分环节则该系统为 型系统。
中科院2013自动控制原理考研真题答案

3
由根轨迹模值条件得出: K1* p1 pi 1 2 2 2
i 1
8
8
3
5
(II) 分离点 d1 时 ,闭环极点分别为: p1 p2 , p3 pi p1 p2
3
3
i 1
3
3
由根轨迹模值条件得出:
1
essv
Kv lim sG(s)
s0
1
1
代入 A、B 系统的传递函数,得: essvA
0.04 , 25
essvB
0.04 25
(注)本题 Bode 图有误,在 =11 rad / s 处,图形是分离的,渐进特性 Bode 图如下:
穿越频率也有误,幅频渐进特性的穿越频率分别为cA 5 rad / s , cB 2.5 rad / s
K
* 2
i 1
5
p1 pi
3
10
3
10 50 1.852
3 27
3) 令 s j ,带入闭环特征式,得 10 72 K * 16 2 j 0
令虚部实部分别等于 0,得 K * 102, 4
所以根轨迹与虚轴的交点为 4 j ,且这两个交点也是闭环极点,
Gz
1 e1 z
2) 闭环脉冲传递函数为: z 1 G z z2 2e1z e1
A 180 90 arctan(cA ) arctan(cA ) arctan(cA ) arctan(cA ) 27.63
0.2
8
11
B 180 90 arctan(cB ) arctan(cB ) 2 arctan(cB ) 45.37
中科大2013年自动控制原理(845)真题

中国科学技术大学2013年硕士学位研究生入学考试试题自动控制原理(845)一、选择题(18分)1、已知单位正反馈系统的传递函数是Φ(s),其开环传递函数是()A、Φ(s)/1-Φ(s)B、1-Φ(s)/Φ(s)C、1/1+Φ(s)D、Φ(s)/1+Φ(s)2、在阶跃信号作用下,典型一阶系统的时间常数T等于( )A、输出达到稳态值约95%所需的时间B、3tsC、达到稳态值约63.2%所需的时间D、ts/4.753、已知a为实轴上零度根轨迹上的点,则在a的___侧,系统开环实零点的个数之和为____数()A、右,偶B、右,奇C、左,偶D、左,奇4、已知系统的开环传递函数如下,则系统的开环增益为()A、6B、4C、2D、15、对于线性定常系统,状态变换可以改变系统的()A、能空性B、能观性C、状态空间方程D、传递函数6、对于线性定常系统,状态反馈不能改变系统的()A、能空性B、能观性C、渐近稳定性D、传递函数二、计算题(26分)单位负反馈控制系统的开环传递函数为:G(s)= k/s(s+3)(s+5)1、分别用两种方法判断使闭环系统稳定的条件;2、确定使闭环系统稳定,且全部闭环极点的实部的绝对值都大于1的条件;3、当跟踪一个速度为0.5m/s的等速度信号时,要求闭环系统稳态跟踪误差不超过0.1m,试确定参数k的取值范围。
三、计算题(20分)单位负反馈控制系统的开环传递函数为:G(s)= k/s(T1s+1)(T2s+1)1、画出奈氏图,并用奈氏稳定判据分析稳定性;2、当k=1,T1=1秒,T2=0.1秒时,概要画出Bode图,并求出增益交界频率、相位交界频率、增益裕量、相位裕量。
四、计算题(30分)单位负反馈控制系统的被控对象传递函数如下:希望闭环系统阶跃响应的百分比超调量小于5%,+2%允许误差的过渡过程时间小于11.5秒,在前向通道设计如下控制器,能否达到设计指标?如果能达到设计指标,请给出设计过程和设计结果;如果不能达到设计指标,请分析原因。
(完整)自动控制原理复习题20套答案
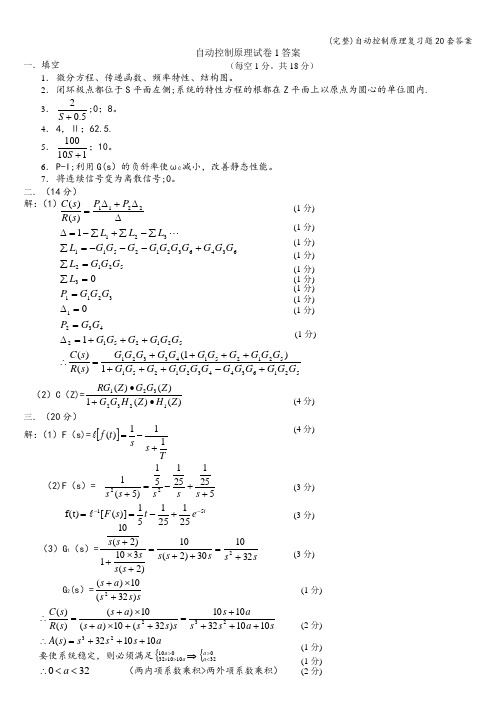
自动控制原理试卷1答案一.填空 1. 微分方程、传递函数、频率特性、结构图。
2. 闭环极点都位于S 平面左侧;系统的特性方程的根都在Z 平面上以原点为圆心的单位圆内.3. 5.02+S ;0;8。
4. 4,Ⅱ;62.5.5. 110100+S ;10。
6. P-I;利用G(s )的负斜率使ωC 减小,改善静态性能。
7. 将连续信号变为离散信号;0。
二.(14分) 解:(1)(2)C (Z)=)()(1)()(1232321Z H Z H G G Z G G Z RG •+•三.(20分)解:(1)F (s)=[]T s st f 111)(+-=(2)F (s )=525125151)5(122++-=+s s ss s(3)G 1(s )=s s s s s s s s s s 321030)2(10)2(3101)2(102+=++=+⨯++G 2(s )=ss s a s )32(10)(2+⨯+sa s s a s s s s a s a s s R s C 1010321010)32(10)(10)()()(232++++=++⨯+⨯+=∴ a s s s s A 101032)(23+++=∴ 要使系统稳定,则必须满足{{032010101032><>>⨯⇒a a a a320<<∴a (两内项系数乘积>两外项系数乘积)521634432125152125143321521251243213211352126346321251132122111)1()()(1001)()(G G G G G G G G G G G G G G G G G G G G G G G G s R s C G G G G G G G G P G G G P L G G G L G G G G G G G G G G L L L L P P s R s C +-+++++++=∴+++=∆==∆==∑=∑+---=∑∑-∑+∑-=∆∆∆+∆= t e t s F 5125125151)]([f(t)--+-== (1分) (1分) (1分) (1分) (1分) (1分) (1分) (1分) (1分)(1分)(4分) (4分)(3分) (3分)(3分)(1分)(2分) (1分)(1分) (2分)(每空1分。
自动控制原理试卷及答案20套 (1)
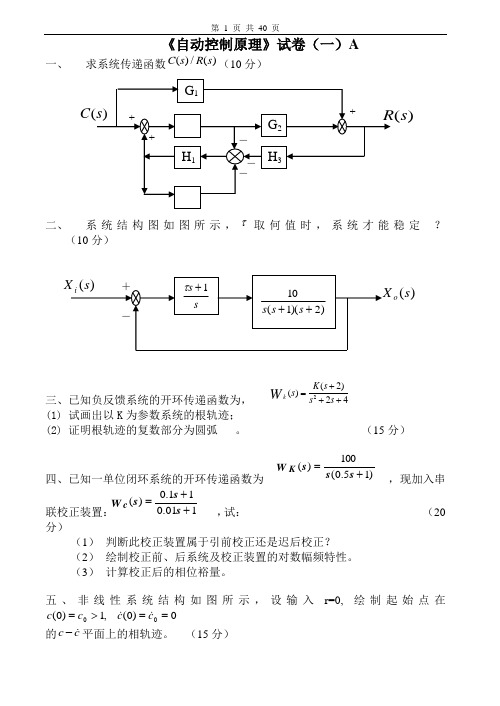
《自动控制原理》试卷(一)A一、)(/)(s R s C二、 系统结构图如图所示,τ取何值时,系统才能稳定 ?(10分)三、已知负反馈系统的开环传递函数为,42)2()(2+++=s s s K s W k(1) 试画出以K 为参数系统的根轨迹;(2) 证明根轨迹的复数部分为圆弧 。
(15分)四、已知一单位闭环系统的开环传递函数为)15.0(100)(+=s s s W K ,现加入串联校正装置:101.011.0)(++=s s s W c ,试: (20分)(1) 判断此校正装置属于引前校正还是迟后校正?(2) 绘制校正前、后系统及校正装置的对数幅频特性。
(3) 计算校正后的相位裕量。
五、非线性系统结构如图所示,设输入r=0, 绘制起始点在0)0(,1)0(00==>=c cc c 的c c -平面上的相轨迹。
(15分)C )(s )(s o六、采样控制系统如图所示,已知s T K 2.0,10==: (15分)1.求出系统的开环脉冲传递函数。
2.当输入为)(1*)(1*)(1)(221t t t t t t r ++=时,求稳态误差ss e 。
七、用奈氏稳定判据判断如下图所示系统的稳定性。
其中,(1)─(3)为线性系统,(4)─(6)为非线性系统。
(15分)s e sT --1 2s K s 5.0 )(s R)(s E )(s C c21se r _ u1 2 0《自动控制原理》试卷(一)B一、 控制系统的结构如下图。
(1) 当F (s )=0时,求系统闭环传递函数)()()(s R s C s =Φ;(2) 系统中H 2(s )应满足什么关系,能使干扰F (s )对输出C (s )没有影响?(10分)二、. 设某控制系统方框图如图所示,要求闭环系统的特征值全部位于s =-1垂线之左,试确定参数K 的取值范围。
(10分)三、.一单位负反馈系统的开环传函为)15.0()125.0()(++=s s s K s W ,欲使该系统对单位阶跃函数的响应为一振幅按指数规律衰减的简谐振荡时间函数,试用根轨迹法确定K 值范围(要求首先绘制根轨迹,求出并在图上标注主要的特征点参数)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、微机原理(100分)
1、8086 CPU复位后AX, CS的值是什么?复位后CPU的启动地址又是什么?
2、写出8086的14个寄存器的名称并简要说明其作用。
3、DS=30B0H,BX=230H,SI=9C0H,若DS:BX=ES:SI,求ES。
4、SUB AH,AL (具体回忆不起来了…只记了这个,反正也不难)
5、简述中断服务程序和子程序的区别。
6、中断服务程序结束时,用RET指令代替IRET指令能否返回主程序,这样做会有什么后果?
7、如下,若DATA段起始物理地址为01300H。
(15分)
DATA SEGMENT
VAR1 DB ’Exam1’
VAR2 DW 6AH, 2 DUP(206FH, 10)
DATA ENDS
(1) 请用图示说明变量VAR2的内存分配和数据预置情况(用十六进制表示)。
(2) 若执行下列代码,AX的内容是什么?(第二问不是原题,但是类似,再复杂一点,也不难)
ENTRY EQU 3
MOV BX,OFFSET VAR2
ADD BX,ENTRY
MOV AX,WORD PTR [BX]
8、某微型计算机系统,其CPU地址线为20位,数据线为8位。
需扩展内存140KB,其中RAM 为128KB,选用62256(32K×8);ROM为12KB,选用EPROM2732(4K×8),要求内存地址空间从40000H开始连续分配,RAM在低地址,ROM在高地址。
(20分)
(1) 分别需要多少块ROM和RAM?给出每一块存储芯片的内存地址范围。
(2) 利用74LS138画出存储器地址译码图。
要求与CPU三总线有相应的连接。
(3)
9、例举手机的接口技术并说明其原理。
(目测是要考察串口通讯,USB嘛)
二、专业英语(50分)
1、数学表达式翻译(4小题,10分)
(1)x+y=z (2)x>y (3)x^2 (4)忘了
2、专业名词翻译(5小题,10分)
传递函数、根轨迹等等
3、英译汉(15分)
控制理论相关的一段文字。
4、汉译英(15分)
控制理论相关的一段文字。