论文-红外避障小车
基于单片机的红外避障小车本科毕业设计(论文)
□ 优 □ 良 □ 中 □ 及格 □ 不及格
评定成绩:□优□良□中□及格□不及格
教研室主任(或答辩小组组长):(签名)
年 月 日
教学系意见:
系主任:(签名)
年 月 日
摘要
随着科学技术的进步,智能化和自动化技术越来越普及,各种高科技技术也广泛应用于智能小车河机器人玩具制造领域,使智能机器人越来越多样化。智能小车是一个多种高新技术的集成体,融合了机械,计算机硬件,软件,电子,人工智能等多种科学技术的知识,可以涉及到当今许多前言领域的技术。
2、是否完成指定的论文(设计)任务(包括装订及附件)?
□ 优 □ 良 □ 中 □ 及格 □ 不及格
二、论文(设计)水平
1、论文(设计)的理论意义或对解决实际问题的指导意义
□ 优 □ 良 □ 中 □ 及格 □ 不及格
2、论文的观念是否有新意?设计是否有创意?
□ 优 □ 良 □ 中 □ 及格 □ 不及格
This design is mainly composed of single-chip microcomputer control system module, motor drive module, the infrared obstacle avoidance module, voice control module, system with STC89C52RC single-chip microcomputer as the core, through the obstacle avoidance module and voice control module receives information to control the motor running. System by 7 1.5 V dry cell by step-down circuit down into a stable dc 5 V for single chip microcomputer and engine power. This paper introduces the principle of infrared obstacle avoidance, the introduction of overall system design and related software. Software part adopts the modular design thinking, the process includes the main program, motor driver, signal detection procedures, through the car runs the operation of the detected information call to turn left, go straight, or stop function to control the car.
毕业设计论文-红外线控制电动小车

毕业设计论文-红外线控制电动小车1 引言1.1 研究背景与意义随着现代电子技术和自动化技术的飞速发展,红外线遥控技术因其操作简便、抗干扰能力强、低功耗等特点在众多领域得到了广泛应用。
电动小车作为现代交通工具的一种,其控制系统的智能化、远程化成为研究热点。
红外线控制电动小车将红外线遥控技术与电动小车相结合,使得小车操作更为便捷,控制更为精确,尤其在特殊环境下,如危险区域的远程探测和物品搬运,具有显著的应用价值。
1.2 研究目的与内容本文旨在设计并实现一种基于红外线控制的电动小车。
研究内容包括:红外线控制技术的原理及其在电动小车上的应用;电动小车的硬件设计,主要包括电动机选型与驱动、电源与控制系统设计;电动小车的软件设计,包括红外线接收与解码、速度与方向控制算法等。
1.3 研究方法与论文结构本研究采用理论与实验相结合的方法,首先对红外线控制技术进行概述,分析电动小车的结构与功能需求,进而设计并实现相应的硬件和软件系统。
论文结构如下:第二章介绍红外线控制技术的基本原理及发展应用;第三章详细阐述电动小车的硬件与软件设计;第四章进行系统测试与分析;第五章对论文研究进行总结,指出不足,并对未来发展进行展望。
2. 红外线控制技术概述2.1 红外线基本原理红外线是一种电磁波,位于可见光与微波之间,波长范围约为700纳米到1毫米。
红外线的发现归功于天文学家威廉·赫歇尔在19世纪早期的实验。
红外线具有热效应,能够被许多物体吸收并转化为热能,这一特性使其在通信和控制技术中得到了广泛应用。
红外线遥控技术基于红外线的传输特性,通过发射和接收红外线信号来实现远距离控制。
其基本原理是利用红外发射二极管发射调制后的红外信号,经过空气传播后,由红外接收器接收并解调,最终将信号传送到控制电路进行处理。
2.2 红外线遥控技术的发展与应用红外线遥控技术自20世纪60年代问世以来,已广泛应用于家电遥控、工业控制、智能家居等领域。
避障小车论文
单片机应用技术课程设计论文论文题目:避障小车学院汽车学院专业电气工程及自动化班级2011级(2)班学生姓名卢鹏飞康帅杨飞学号201105820243 201105820223201105820225成绩2013年11月22日【摘要】本设计是设计一款基于单片机的遥控窗帘,其中的单片机是遥控控制的核心,用于接收处理遥控信号,通过对一台直流电机的正反转控制,模拟实现对窗帘开、合的控制。
此系统具有无线控制与手动控制两种方式,以保证一种控制方式出现问题,可以及时使用另一种控制方式对单片机进行控制。
本报告简要介绍了基于单片机技术的遥控窗帘的设计原理,并根据系统的基本原理制作出了实物模型。
本控制系统主要由以下几个模块组成:无线信号发射模块、无线信号接收模块、电机驱动模块、电机运行转数检测模块以及单片机控制模块。
其中无线信号发射模块的控制核心是编码芯片PT2262,配套使用的是以解码芯片PT2272为核心的无线信号接收模块,这两组模块配合将对电机控制的正反转控制信息转变为单片机可以识别的二进制代码,通过与单片机内部的程序配合实现对窗帘正反停运行状况的无线遥控控制;电机驱动模块是以L298N芯片以及光耦芯片TLP521-4为核心的功率驱动电路;电机运行转数检测模块是根据霍尔元件对磁钢磁场变化而发出电压脉冲信号的原理做成的;单片机控制模块的核心组成元件是AT89S52芯片,配以单片机的最小系统电路,作为无线遥控窗帘系统的总的控制模块。
此外系统可以实现电机运行状态的显示,比如当电机正转是某对应信号灯亮等。
关键词:单片机技术;红外传感器臂章技术;蜂鸣器;4WD驱动模块;目录1 设计任务 (1)2 系统硬件设计 (2)2.1 器件选择 (2)2.2 硬件原理图 (2)3 系统软件设计 (10)3.1软件流程图 (10)4 设计总结 (11)参考文献 (12)附1:源程序代码 (6)附2:系统原理图 (7)1 设计任务任务要求:本次设计课题是智能避障小车,具体任务要求如下:开始小车直线行走,当前方遇到障碍时,报警器报警,同时:(1):左边传感器检测到障碍物,小车向右撞。
智能避障小车毕业论文
智能避障小车毕业论文智能避障小车毕业论文引言:随着科技的不断进步,智能机器人在各个领域的应用越来越广泛。
智能避障小车作为机器人领域的重要研究方向之一,具有广阔的发展前景。
本篇论文将围绕智能避障小车展开讨论,并探讨其在未来的应用前景。
1. 智能避障小车的背景和意义智能避障小车是一种能够通过传感器感知周围环境并避免障碍物的机器人。
它的研究和应用对于提高自动化程度、减少人力资源浪费具有重要意义。
智能避障小车可以应用于工业生产线、仓储物流、军事侦察等领域,为人们的生产和生活带来巨大的便利。
2. 智能避障小车的技术原理智能避障小车主要依靠传感器和控制系统实现。
传感器可以通过激光、红外线、超声波等方式感知周围环境,将感知到的数据传输给控制系统。
控制系统根据传感器的数据分析判断,控制小车的运动方向和速度,以避开障碍物。
其中,路径规划、障碍物检测和避障算法是智能避障小车的核心技术。
3. 智能避障小车的关键技术挑战智能避障小车的研究面临着一些技术挑战。
首先,传感器的准确性和稳定性对于小车的运行至关重要,需要解决传感器误差和干扰问题。
其次,路径规划算法需要考虑到环境的复杂性和实时性,以确保小车能够快速、准确地避开障碍物。
此外,障碍物检测算法的高效性和鲁棒性也是需要解决的难题。
4. 智能避障小车的应用前景智能避障小车在工业生产、物流仓储、军事侦察等领域具有广泛的应用前景。
在工业生产中,智能避障小车可以替代人工搬运,提高生产效率和安全性。
在物流仓储领域,智能避障小车可以实现自动化仓储和物流运输,减少人力资源浪费。
在军事侦察中,智能避障小车可以代替士兵进行侦察任务,提高作战效果和保障士兵的安全。
结论:智能避障小车作为机器人领域的重要研究方向,具有广阔的发展前景。
通过不断改进传感器技术、控制系统和算法,智能避障小车将在各个领域发挥重要作用,为人们的生产和生活带来更多的便利。
未来,我们可以期待智能避障小车的更加智能化、高效化和多功能化的发展。
智能避障小车论文

“神戎”杯山东大学信息学院光电设计大赛基于光电导航的智能移动测量小车简介竞赛说明:设计一辆具有光电导航功能的智能车,要求从线路的指定点出发,沿轨道上铺设的“8”字形导航条走完全程。
在行走过程中,利用光电技术测量、记录沿途所通过隧道的数目、各段隧道的长度及沿途路边树木的棵数。
目录第1章引言 (4)第2章总体方案 (5)2.1 需求分析 (5)2.2 总体分析 (5)2.3 方案确定 (5)第3章硬件方案 (7)3.1 车体设计 (7)3.2 主控制器模块 (7)3.3 电源模块 (7)3.4 电机驱动模块 (7)3.5 电机模块 (8)3.6 循迹模块 (8)3.7 测量显示 (8)3.7 最终方案 (8)第4章硬件实现及单元电路设计 (9)4.1 主控模块 (9)4.2 电源设计 (9)4.3 驱动电路 (9)4.2 循迹设计 (10)4.2 测量显示 (10)第5章系统软件设计方案 (11)第6章系统的安装及调试 (12)6.1 安装步骤 (12)6.2电路的调试 (12)第7章心得与总结 (12)经费预算 (14)附录 (15)第一章引言随着汽车工业的快速发展,关于汽车的研究也越来越受到人们的关注。
智能汽车概念的提出给汽车产业带来机遇也带了挑战。
汽车的智能化必将是未来汽车产业发展的趋势,在这样的背景下,我们开展了基于超声波和红外线的智能小车的避障研究。
针对一种基于红外传感器的循迹小车,通过对整体方案、电路、算法、调试、车辆参数的介绍,详尽地阐述小车通过传感器系统感知外界环境和自身状态, 在复杂的环境中自主移动并完成相应的任务。
红外传感器以其独有的特征而被青睐。
该智能小车系统涉及直流电机控制技术、路径识别、传感技术、电子设计、程序设计等多个学科,磨练我们的知识融合和实践动手能力的培养。
摘要:智能作为现代的新发明,是以后的发展方向,他可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探用途。
《红外避障小汽车》word版
******学院毕业论文题目红外避障小汽车姓名:_ ****** _____ 所在学院:___ 电子工程学院_ 所学专业:___ ******* _______班级 ___ *********** ________学号 _ ******* ______ 指导教师: ****** 完成时间:____ 201*年11月1日本文主要详细介绍了一种以AT89S51这对芯片操作控制的玩具车或模型车。
遥控车由发射机/遥控器和接收机组成,遥控车的控制信号,通过手摇杆上的发射机发出,由装在车上的接收机接收。
所有的编码信号全部通过红外发射接收实现无线遥控。
接收机根据接收到的不同编码信号,通过直流电机驱动电路放大电信号,驱动直流电机,改变车轮的转动方向,执行前进,后退,左转,右转,使其具备智能化。
通过此次实验,加强自己的动手能力,加深对芯片的了解,及红外线遥控的认识。
关键词:AT89S51,编码,红外线遥控AbstractThe vehicle or model having introduced one kind of the toy that this controls with AT89S51 to chip operation mainly detailedly lathes the main body of a book. Remote control vehicle is composed of X-mitter/ remote control implement and receiver, remote control vehicle pilot signal, upper X-mitter makes by hand pole , admit from dress in receiver on vehicle. All code signals all by the fact that infrared go off taking-over realizes wireless remote control. The receiver is based on the code signal receiving the diversity arriving at , enlarge an electric signal , drive a continuous current dynamo by the fact that the continuous current dynamo drives a circuit, change a carriage wheel's turn direction , carr y out make one's way , retreat , turn left , turn right, the person has a messenger intellectualized. And getting to work passing this experiment , reinforcing self the ability, deepens the .know about to the chip, telecontrolled infrared ray cognitionKeywordsAT89S51,Code,Infrared ray remote control1.1 LCD液晶显示器早在19世纪末,奥地利植物学家就发现了液晶,即液态的晶体,也就是说一[1]种物质同时具备了液体的流动性和类似晶体的某种排列特性。
避障小车毕业论文
避障小车毕业论文避障小车的研究与设计摘要避障小车是一种可以自主避开障碍物的智能小车,其具有重要的应用价值。
本文从机器人控制原理、图像处理技术以及硬件设计等方面出发,对避障小车的设计及其实现方法进行了详细论述。
在硬件设计方面,本文采用了单片机控制器进行控制,采用了基于超声波和红外线的避障传感器,以及直流电机进行驱动。
在软件系统设计方面,本文采用了C语言进行编写,针对避障小车实现了避障、控制、传感器数据处理等功能。
通过实验验证,本文的避障小车能够比较准确地避开障碍物,具有一定的实用价值。
关键词:机器人控制原理、图像处理、硬件设计、软件设计、避障小车AbstractThe obstacle-avoiding robot car is an intelligent car that can autonomously avoid obstacles, with significant application value. This paper elaborates on the design and implementation methods of the obstacle-avoiding small car from the aspects of robot control principle, image processing technology, and hardware design. Interms of hardware design, this paper uses a single-chip microcontroller for control, obstacle-avoiding sensors based on ultrasonic and infrared, and DC motors for driving. In the software system design aspect, this paper uses C language for writing, and realizes the functions of obstacle avoidance, control, and sensor data processing for the obstacle-avoiding small car. Through experiments, the obstacle-avoiding small car in this paper can accurately avoid obstacles and has practical value.Keywords: robot control principle, image processing, hardware design, software design, obstacle-avoiding car引言随着人工智能的发展,智能小车在日常生活和工业环境中得到了广泛的应用。
智能循迹避障小车论文
自动化专业导论智能循迹避障小车学生姓名:学号:指导教师:目录摘要引言第一章绪论1.1智能小车的背景1.2智能小车的现状第二章设计方案2.1设计任务2.2方案及轨道选择2.3智能小车元件介绍第三章硬件设计3.1总体设计3.2驱动电路3.3信号检测模块3.4主控线路第四章软件设计4.1主程序模块4.2电机驱动程序4.3循迹模块4.4避障模块第五章制作安装与调试作品总结致谢摘要利用红外对管检测黑线与障碍物,并以STC89C52单片机为控制芯片控制电动小汽车的速度及转向,从而实现自动循迹避障的功能。
其中小车驱动由L298N驱动电路完成,速度由单片机输出的PWM波控制。
关键词:智能小车;STC89C52单片机;L298N;红外对管引言2004年1月3日和1月24日肩负着人类探测火星使命的“勇气”号和“机遇”号在火星不同区域着陆,并于2004年4月5日和2004年4月26 日相继通过所有“考核标准”。
火星车能够在火星上自主行驶:当火星车发现值得探测的目标,它会驱动六个轮子向目标行驶;在检测到前进方向上的障碍后,火星车会去寻找可能的最佳路径。
据悉,中国的登月计划分三步进行:第一步,发射太空实验室和寻找贵重元素的月球轨道飞行器;第二步,实现太空机器人登月;第三步,载人登月。
随着“神舟”系列飞船和“嫦娥”月球探测卫星的成功发射,第一步接近成熟;第二步中太空机器人登月计划中的太空机器人应该能在月球上自主行驶,进行相关探测。
因此对于我国来说,类似于美国“勇气”号和“机遇”号火星车的智能车技术研究也显得迫在眉睫。
目前,城市交通的安全问题己引起各国政府有关部门的高度重视和全民的关注,专家、学者在分析城市交通事故的原因时,普遍认为事故原因主要包括:人员素质、运输车辆、道路环境和管理法规等四个方面,而车辆性能的提高即研发高性能的智能汽车是其中很重要的一个环节。
美国研究认为,包括智能汽车研究在内的智能运输系统对国家社会经济和交通运输有着巨大的影响,其意义和价值在于:大量减少公路交通堵塞和拥挤,降低汽车的油耗,可使城市交通堵塞和拥挤造成的损失分别减少25%-40%左右,大大提高了公路交通的安全性及运输效率,促进了交通运输业的繁荣发展。
智能避障小车毕业设计论文
智能避障小车毕业设计论文Document number:WTWYT-WYWY-BTGTT-YTTYU-2018GT智能避障机器人设计与研究(硬件)摘要在科学探索和紧急抢险中经常会遇到对一些危险或人类不能直接到达的地域的探测,这些就需要用机器人来完成。
而机器人在复杂地形中行进时自动避障是一项必不可少也是最基本的功能。
因此,自动避障系统的研发就应运而生。
自动避障机器人就是基于这一系统开发而成的。
随着科技的发展,对于未知空间和人类所不能直接到达的地域的探索逐步成为热门,这就使机器人的自动避障有了重大的意义。
自动避障机器人可以作为地域探索机器人和紧急抢险机器人的运动系统,让机器人在行进中自动避过障碍物。
本文提出了一种经济实用的智能避障机器人系统设计方法,采用了小车底盘作为载体、直流电机作为执行元件、红外传感器作为检测元件、STC89C52单片机作为主控芯片、L298N作为驱动芯片和稳压电源芯片完成了检测电路设计、主控电路设计、电机驱动电路设计、稳压电路设计等硬件设计和制作,并对系统进行了仿真和综合调试,解决了一系列的难题,成功实现了自动避障功能。
关键词:智能避障机器人,红外传感器,单片机,L298N,PWM调速THE DESIGN AND STUDY OF INTELLIGENTOBSTACLE AVOIDANCE ROBOT(HARDWARE)ABSTRACTIn scientific exploration and emergency rescue often encounter some danger or human can not directly reach the area of detection, these will need to use the robot to complete. The robot's automatic obstacle avoidance movement in complex terrain is an essential and most basic function. Therefore, the automatic obstacle avoidance system development is made. Automatic obstacle avoidance robot development based on this system is made of. With the development of technologyfor the unknown space and mankind can not be directly accessible to gradually become a hot area of exploration, which makes the automatic obstacle avoidance robot has great significance. Auto matic obstacle avoidance robot can serve as a regional exploration and emergency rescue robot system that allows robots to automatically avoid obstacles in the road.This paper presents an economical and p ractical design of intelligent obstacle avoidance robot system, using the car chassis as the carrier, the DC motor as the actuator, infrared sensors as detection devices, STC89C52 microcontroller as the main chip, L298N as the driver chip and regulated power supply chip to complete the detection circuit design, master control circuit design, motor driver circuit design, voltage regulator circuit design of hardware design and production. A lot of simulation and integrated debugging have been done to the system and a series of problems have been solved. Finally, the automatic obstacle avoidance function is accomplished successfully.KEY WORDS:Intelligent obstacle avoidance robot, infrared sensor, MCU,L298N, PWMspeedadjusting目录前言 (1)第1章系统总体方案设计 (4)§系统任务描述 (4)§控制系统要求 (4)§方案设计与论证 (4)§机器人载体选择 (4)§主控制器选择 (5)§传感器选择 (5)§电机驱动选择 (6)§稳压电源选择 (7)§智能小车最终方案 (7)§系统总体设计 (8)§系统组成 (8)§系统工作原理 (8)§本章小结 (9)第2章硬件设计 (10)§主控电路设计 (10)§ STC89C52单片机硬件结构简介 (10)§最小应用系统设计 (12)§电机驱动电路的设计 (15)§智能小车驱动电机的要求 (15)§直流电机调速原理 (16)§ L298N电机驱动原理 (17)§障碍物检测电路设计 (22)§报警电路设计 (23)§稳压电源电路设计 (24)§系统整体电路设计 (25)§本章小结 (26)第3章软件设计简介 (27)§主程序模块 (27)§程序控制设计 (27)§主程序流程图 (27)§初始化模块 (29)§延时模块 (29)§中断模块 (29)§报警模块 (29)§驱动模块 (29)§本章小结 (30)第4章系统的安装与调试 (31)§安装步骤 (31)§系统调试 (31)§硬件调试 (31)§软件调试 (32)§联合调试 (32)§本章小结 (32)结论 (33)参考文献 (34)致谢 (35)附录 (36)前言1.设计的依据与意义机器人作为人类的新型生产工具,在减轻劳动强度,提高生产率,改变生产模式,把人从危险、恶劣、繁重的工作环境下解放出来等方面,显示出极大的优越性。
自动避障循迹小车毕业论文
自动避障循迹小车毕业论文自动避障循迹小车毕业论文目录1 绪论 (1)1.1智能小车的研究与意义 (1)1.2智能小车的现状 (3)1.2.1国外移动机器人研究 (3)1.2.2国移动机器人的状况 (4)1.2.3小车避障现状综诉 (4)1.2.4智能小车的现状 (4)1.3论文研究容与主要结构 (5)1.3.1基于单片机控制的智能循迹避障小车 (5)1.3.2文章主要结构 (5)2 方案选型设计 (6)2.1车体设计 (6)2.2电机驱动设计 (6)2.2.1电机选择 (6)2.2.2驱动选择 (7)2.2.3H桥式电路工作原理 (9)2.2.4PWM调速技术 (9)2.3循迹模块 (9)2.3.1光电传感器的工作原理 (9)2.3.2光电传感器的分类和工作方式 (9)2.3.3光电传感器的选择 (10)2.4避障模块 (11)2.4.1超声波测距的原理 (11)2.4.2超声波传感器的分类 (12)2.4.3超声波测距特点 (12)2.4.4超声波模块选择 (13)2.5显示模块 (14)2.5.1数码管的结构及工作原理 (14) 2.5.2数码管的选择 (15)2.6控制系统模块 (15)2.6.1单片机的发展 (15)2.6.2AT89C52单片机的简单介绍 (17)2.7电源模块 (17)3 硬件设计 (18)3.1总体设计 (18)3.1.1小车总体概述 (18)3.1.2小车总体设计框图 (19)3.2驱动电路设计 (19)3.3信号检测模块电路设计 (21)3.3.1循迹模块信号检测电路 (21)3.3.2壁障模块和显示信号检测电路 (22) 3.4显示模块电路设计 (24)3.5主控电路设计 (27)3.5.1单片机最小系统设计 (27)3.5.2主控电路图 (30)4 软件设计 (31)4.1主程序设计 (31)4.1.1主程序框图 (31)4.1.2主程序流程图 (32)4.2循迹模块程序设计 (33)4.3显示模块程序设计 (33)4.4避障模块程序设计 (34)5 制作安装与调试 (35)5.1小车的安装 (35)5.2小车的调试 (35)5.3智能小车的功能 (36)结论 (37)参考文献 (38)附录: (40)中文译文 (44)致谢 (52)1 绪论1.1智能小车的研究与意义移动机器人是机器人领域的一个分支,他的研究始于60年代末期,斯坦福研究院(SRI)的Nits Nilssen和Charles Rosen 等人,在1966年至1972年间研制出了名为Shake的自主移动机器人[1]。
基于单片机的红外避障小车毕业设计(论文) 精品
驾驶员本身的状态信息,必要时发出预警信息。主要包括碰撞预警系统和驾驶员状态监控系统。碰撞预警系统可以给出前方碰撞警告、盲点警告、车道偏离警告、换道/并道警告、十字路口警告、行人检测与警告、后方碰撞警告等.驾驶员状态监控系统包括驾驶员打吨警告系统、驾驶员位置占有状态监测系统等。
本设计主要由单片机控制系统模块、电机驱动模块、红外避障模块、声控模块组成,系统以STC89C52RC单片机为核心,通过避障模块和声控模块接受到的信息来控制电机运行。系统通过7节1.5V干电池通过降压电路降成5V稳定直流电对单片机和发动机进行供电。本文介绍了红外避障的原理、系统整体设计及相关软件的介绍。软件部分采用模块化设计思路,整个程序包括主程序,电机驱动程序,信号检测程序,通过小车运行时检测到的运行信息来调用左转、直行或停止函数来控制小车。
其实物图和原理图如下图
红外传感器E18-D80NK-N实物图
红外传感器E18-D80NK-N内部原理图
电器特性:
红色:VCC;黑色:GND;黄色:OUT。
U:5VDC
This design is mainly composed of single-chip microcomputer control system module, motor drive module, the infrared obstacle avoidance module, voice control module, system with STC89C52RC single-chip microcomputer as the core, through the obstacle avoidance module and voice control module receives information to control the motor running. System by 7 1.5 V dry cell by step-down circuit down into a stable dc 5 V for single chip microcomputer and engine power. This paper introduces the principle of infrared obstacle avoidance, the introduction of overall system design and related software. Software part adopts the modular design thinking, the process includes the main program, motor driver, signal detection procedures, through the car runs the operation of the detected information call to turn left, go straight, or stop function to control the car.
毕业论文 智能循迹避障小车(学术参考)
毕业论文(设计)论文题目:自动寻迹、避障智能小车设计学生姓名:XXX学号:XXXX所在院系:电气信息工程学院专业名称:电子信息科学与技术届次:XXX指导教师:XXX淮南师范学院本科毕业论文(设计)诚信承诺书1.本人郑重承诺:所呈交的毕业论文(设计),题目《》是本人在指导教师指导下独立完成的,没有弄虚作假,没有抄袭、剽窃别人的内容;2.毕业论文(设计)所使用的相关资料、数据、观点等均真实可靠,文中所有引用的他人观点、材料、数据、图表均已注释说明来源;3. 毕业论文(设计)中无抄袭、剽窃或不正当引用他人学术观点、思想和学术成果,伪造、篡改数据的情况;4.本人已被告知并清楚:学院对毕业论文(设计)中的抄袭、剽窃、弄虚作假等违反学术规范的行为将严肃处理,并可能导致毕业论文(设计)成绩不合格,无法正常毕业、取消学士学位资格或注销并追回已发放的毕业证书、学士学位证书等严重后果;5.若在省教育厅、学院组织的毕业论文(设计)检查、评比中,被发现有抄袭、剽窃、弄虚作假等违反学术规范的行为,本人愿意接受学院按有关规定给予的处理,并承担相应责任。
学生(签名):日期:年月日目录1 绪论 (2)1.1 课题研究的背景 (2)1.2 课题研究的主要内容 (3)2 系统方案确定及主要元件的选择 (3)2.1 系统方案确定 (3)2.2 主要元件的选择 (4)3 系统硬件部分设计 (6)3.1 主控器AT89C51 (6)3.2 复位电路 (8)3.3 时钟电路 (9)3.4 寻迹模块 (9)3.5 避障模块 (10)3.6 声控模块 (11)3.7 H桥电机驱动 (11)3.8 电源模块 (13)3.9系统的整体电路 (13)4 系统软件部分设计 (14)4.1 系统使用的软件简介 (14)4.2 软件调试平台 (15)4.3 系统程序流程设计 (17)4.4 系统仿真实现 (17)结论 (20)参考文献 (20)自动寻迹、避障智能小车设计学生:XX(指导教师:XX)(淮南师范学院电气信息工程学院)摘要:智能小车是移动式机器人的重要组成部分,本设计通过实时检测各个模块传感器的输入信号,利用红外对管检测黑线实现寻迹,通过光电传感器实现避障,采用存储空间较大的AT89C51作为主控制芯片,小车电机驱动采用L298N芯片,根据内置的程序分别控制小车左右两个直流电机运转,实现小车自动识别路线,能较有效的控制其在碰上障碍物时能转弯角度及寻迹行驶。
论文-红外避障小车
第一章绪论1.1 引言自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航、国防等领域。
近年来机器人的智能水平不断提高,并且迅速地改变着人们的生活方式。
人们在不断探讨、改造、认识自然的过程中,制造能替代人劳动的机器一直是人类的梦想。
由于在科学探索和紧急抢险中经常会遇到对与一些危险或人类不能直接到达的地域的探测,这些就需要用机器人来完成。
随着科技的发展,对于未知空间和人类所不能直接到达的地域的探索逐步成为热门,这就使机器人的自动避障有了重大的意义。
而在机器人在复杂地形中行进时自动避障是一项必不可少也是最基本的功能,因此,自动避障系统的研发就应运而生。
自动避障小车可以作为地域探索机器人和紧急抢险机器人的运动系统,让机器人在行进中自动避过障碍物,所以我们的自动避障小车就是基于这一目标而设计的的,该智能小车可以作为机器人的典型代表,它可以分为三大组成部分:传感器检测部分、执行部分、CPU,本次的设计中采用的技术主要有通过编程来控制小车的速度、传感器的有效应用、新型芯片的采用等等。
智能作为现代的新发明,是以后的发展方向,他可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等等的用途。
所以我们的机器人不仅仅可以实现自动避障功能,还可以扩到展循迹等功能,感知导引线和障碍物等多个方面。
1.2 设计任务1.2.1 设计思想本系统要求自行设计制作一个智能小车,该小车在前进的过程中能够检测到前方障碍并自动避开,达到避障的效果。
我的设计思想是采用C8051F310单片机为控制核心,利用位置传感器检测道路上的障碍,通过采集数据并处理后由单片机产生PWM波驱动直流电机对车进行转向和行动控制,控制电动小汽车的自动避障,快慢速行驶,以及自动停车。
1.2.2 功能概述根据题目中的设计要求,本系统主要由微控制器模块、避障模块、直流电机及其驱动模块电源模块等构成。
本系统的方框图如图1-2-2所示:图1-1 系统方框图微控制器模块:通过采用C8051F310作为微控制器接受传感器部分收集到的外部信息进行处理,并将结果输出到电机驱动模块控制电机运行。
设计和制作红外遥控式小车
设计和制作红外遥控式小车设计和制作红外遥控式小车论文关键字:AT89C51单片机直流电机红外线遥控循迹L298论文摘要:本文介绍创新设计制作一款红外线遥控小车,以AT89S51单片机为核心控制器,用L289驱动直流电机工作,控制小车的运行。
本款小车具有红外线遥控手动驾驶、自动驾驶、寻迹前进等功能。
本系统采用模块化设计,软件用C语言编写。
一、设计任务和要求以AT98C51单片机为核心,制作一款红外遥控小车,小车具有自动驾驶,手动驾驶和循迹前进等功能。
自动驾驶时,前进过程中可以避障。
手动驾驶时,遥控控制小车前进、后退、左转、右转、加速等操作。
寻迹前进时小车还可以按照预先设计好的轨迹前进。
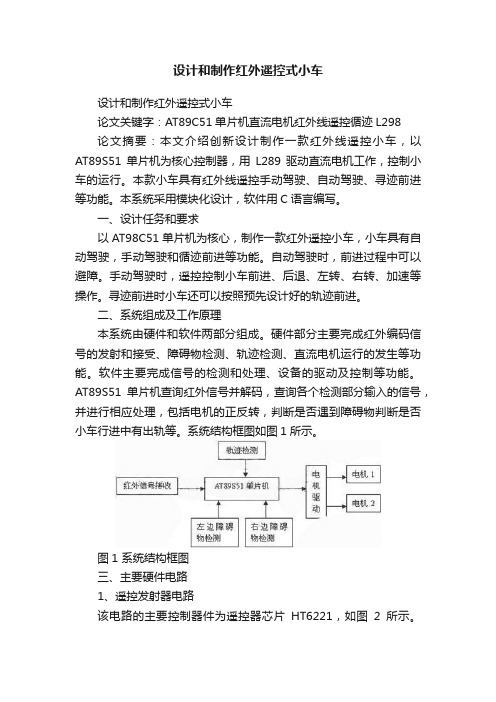
二、系统组成及工作原理本系统由硬件和软件两部分组成。
硬件部分主要完成红外编码信号的发射和接受、障碍物检测、轨迹检测、直流电机运行的发生等功能。
软件主要完成信号的检测和处理、设备的驱动及控制等功能。
AT89S51单片机查询红外信号并解码,查询各个检测部分输入的信号,并进行相应处理,包括电机的正反转,判断是否遇到障碍物判断是否小车行进中有出轨等。
系统结构框图如图1所示。
图1 系统结构框图三、主要硬件电路1、遥控发射器电路该电路的主要控制器件为遥控器芯片HT6221,如图2所示。
HT6221将红外码调制成38KHZ的脉冲信号通过红外发射二极管发出红外编码。
图2中D1是红外发射二极管,D2是按键指示灯,当有按键按下时D2点亮。
HT6221的编码规则是:当一个键按下超过36ms,振荡器使芯片激活,如果这个按键按下且延迟大约108ms,这108ms发射代码由一个起始码(9ms),一个结果码(4.5ms),低8位地址码(9ms~18ms),高8位地址码(9~18ms),8位数据码(9~18ms)和这8位数据码的反码(9~18ms)组成,如果按键按下超过108ms仍未松开,接下来发射的代码将仅由起始码(9ms)和结束码(2.5ms)组成。
智能避障小车设计毕业论文.doc

智能避障小车设计毕业论文目录1引言 (1)1.1课题背景 (1)1.2论文的研究任务与内容 (2)2方案设计与论证 (3)2.1主控系统 (3)2.2直流调速系统 (4)2.3检测系统 (5)2.4电机驱动系统 (6)2.5 机械系统 (8)2.6电源模块 (9)3硬件设计 (10)3.1总体设计 (10)3.1.189C52单片机硬件结构 (12)3.1.2单片机最小系统设计 (16)3.2避障模块 (18)3.3驱动电路 (19)3.4总控制系统 (23)4软件设计 (24)4.1程序设计 (24)4.1.1电机驱动程序 (24)4.1.2避障程序 (25)4.1.3电机调速程序 (28)5总结与展望 (32)致谢 (33)参考文献 (34)外文资料 (35)附录1程序清单 (40)附录2电路图 (53)1引言1.1课题背景机器人技术的发展,它应该说是一个科学技术发展共同的一个综合性的结果,同时,为社会经济发展产生了一个重大影响的一门科学技术,它的发展归功于在第二次世界大战中各国加强了经济的投入,就加强了本国的经济的发展。
比如说日本,战后以后开始进行汽车的工业,那么这时候由于它人力的缺乏,它迫切需要一种机器人来进行大批量的制造,提高生产效率降低人的劳动强度,这是从社会发展需求本身的一个需求。
另一方面它也是生产力发展的需求的必然结果,也是人类自身发展的必然结果。
但另一方面,尽管人们有各种各样的好的想法,但是它也归功于电子技术,计算机技术以及制造技术等相关技术的发展而产生了提供了强大的技术保证。
机器人经历了三个发展阶段:第一代机器人也叫示教再现型机器人,它是通过一个计算机,来控制一个多自由度的一个机械,通过示教存储程序和信息,工作时把信息读取出来,然后发出指令。
第二代机器人,也被称作带感觉的机器人,这种带感觉的机器人是类似人在某种功能的感觉,比如说力觉、触觉、滑觉、视觉、听觉。
第三代机器人,也是我们机器人学中一个理想的所追求的最高级的阶段,叫智能机器人,那么只要告诉它做什么,不用告诉它怎么去做,它就能完成运动,感知思维和人机通讯的这种功能和机能。
红外避障小车
红外避障小车摘要:针对本专业给出的论文题材,我设计了一款简易的红外避障小车。
该电路设计分别以驱动模块,单片机控制显示模块组成。
为了达到小车壁障的目的,因此以ATMEGA16-L为核心控制器件,以LM298驱动电机控制系统和红外监测系统设计而成。
关键词:ATMEGA16-L;红外避障检测电路;驱动电路。
一、模块方案比较1.壁障模块在壁障模块中,可以选择超声波壁障。
其优点是反应速度灵敏,距离远,受外界干扰小。
但是,在本设计中,题目所要求是距离是20cm,如果利用超声波传感器进行壁障的话,由于空间小声波在小空间不同方向里会进行多次反射,左右前后的传感器之间相互干扰,使控制中心不能明确判断出那个方位遇到了障碍物,从而动作紊乱,不能实现要求。
使用红外接收头和发射管配合,利用38k频率解决灵敏度问题。
38K调制和发射电路。
使用一个定时器的快速PWM模式产生38K调制信号,通过剩余的四个施密特触发器(有2个已经用在光电编码部分)缓冲,推动8050三极管和红外发光管来发射已经调制的红外线。
其中2个1N4148接单片机IO脚,控制左右红外发光管轮流发射。
后面串接的可见光LED是为了方便用户调试而设置的,让用户知道当前是否在发射红外线。
通过调节PWM的占空比,调节红外发光管的亮度,从而实现调节感知障碍物距离的功能。
但是实际测试结果不尽人意。
灵敏度太高。
加衰减电路比较麻烦,调试不易。
且价格也贵。
利用红外传感器,其优点是对近距离的障碍物反应速度灵敏,不同方位的传感器之间信号不会相互干扰,造成误动作。
缺点是距离近,易受到自然光的干扰。
经过两种传感器性能对比与题目要求的综合考虑分析,最终选择红外传感器作为小车的眼睛,进行壁障。
LM567是一种廉价的音频锁相环集成电路,利用它可以构造性能较好的反射式光电传感器。
如下页图所示,由LM567的内部振荡器提供方波信号,点亮探头的LED,由探头的光敏管接收反射光。
经三极管放大,转换成电压信号后送到LM567的内部鉴相器2(输出鉴相器)同步解调,然后由LM567内部的比较器转换为数字输出。
毕业论文:智能避障小车
1.2.2
本题目要求小车的机械系统稳定、简单,而四轮运动系统具备以上特点.
驱动部份:由于玩具汽车的直流机电功率较小,而小车上装有电池、机电、电子器件等,使得机电负担较重.为使小车能够顺利启动,且运动平稳,在直流机电和轮车轴之间加装了三级减速齿轮.
红外探测器的选型与工作方式:
1、红外探测器的选型
红外探测器以其发射功率年夜、抗干扰能力强而在工业生产中有着广泛的应用,红外探测器按其工作模式可年夜致分为主动式与主动式,主动式红外探测器自带红外光源,通过对光源的遮挡、反射、折射等光学手段可以完成对被探测物体位置的判别.主动式红外探测器自己没有光源,通过接受被探测物体的特征光谱辐射来丈量被探测物的位置、温度或进行红外成像.直流直接驱动方式装置简单但检测距离和抗干扰能力都比力差;交流调制方式由于可以采纳交流耦合方式解决了放年夜器的直流漂移问题从而可以年夜年夜提高检测的距离,同时由于环境光发生的干扰大都情况是信号的直流或低频分量可以由滤波器加以隔绝,因此交流调试方式抗干扰能力也比力强,缺点是系统相对复杂.在本体中我们要利用红外探测器检测障碍物的距离,显然选用主动式红外传感器比力合适,系统的造价可以降低可靠性可以提高.
2、主动式红外探测器的工作方式选取
主动式红外探测器经常使用的驱动方式可分为直流直接驱动方式和交流调制方式,直流直接驱动方式装置简单但检测距离和抗干扰能力都比力差;交流调制方式由于可以采纳交流耦合方式解决了放年夜器的直流漂移问题从而可以年夜年夜提高检测的距离,同时由于环境光发生的干扰大都情况是信号的直流或低频分量可以由滤波器加以隔绝,因此交流调试方式抗干扰能力也比力强,缺点是系统相对复杂.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一章绪论1.1 引言自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航、国防等领域。
近年来机器人的智能水平不断提高,并且迅速地改变着人们的生活方式。
人们在不断探讨、改造、认识自然的过程中,制造能替代人劳动的机器一直是人类的梦想。
由于在科学探索和紧急抢险中经常会遇到对与一些危险或人类不能直接到达的地域的探测,这些就需要用机器人来完成。
随着科技的发展,对于未知空间和人类所不能直接到达的地域的探索逐步成为热门,这就使机器人的自动避障有了重大的意义。
而在机器人在复杂地形中行进时自动避障是一项必不可少也是最基本的功能,因此,自动避障系统的研发就应运而生。
自动避障小车可以作为地域探索机器人和紧急抢险机器人的运动系统,让机器人在行进中自动避过障碍物,所以我们的自动避障小车就是基于这一目标而设计的的,该智能小车可以作为机器人的典型代表,它可以分为三大组成部分:传感器检测部分、执行部分、CPU,本次的设计中采用的技术主要有通过编程来控制小车的速度、传感器的有效应用、新型芯片的采用等等。
智能作为现代的新发明,是以后的发展方向,他可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等等的用途。
所以我们的机器人不仅仅可以实现自动避障功能,还可以扩到展循迹等功能,感知导引线和障碍物等多个方面。
1.2 设计任务1.2.1 设计思想本系统要求自行设计制作一个智能小车,该小车在前进的过程中能够检测到前方障碍并自动避开,达到避障的效果。
我的设计思想是采用C8051F310单片机为控制核心,利用位置传感器检测道路上的障碍,通过采集数据并处理后由单片机产生PWM波驱动直流电机对车进行转向和行动控制,控制电动小汽车的自动避障,快慢速行驶,以及自动停车。
1.2.2 功能概述根据题目中的设计要求,本系统主要由微控制器模块、避障模块、直流电机及其驱动模块电源模块等构成。
本系统的方框图如图1-2-2所示:图1-1 系统方框图微控制器模块:通过采用C8051F310作为微控制器接受传感器部分收集到的外部信息进行处理,并将结果输出到电机驱动模块控制电机运行。
避障模块:采用位置传感器的漫反射检测来检测前方是否有障碍,通过红外光电开关采集到的信号送到微控制器。
驱动模块:通过接收微控制器产生的信号来驱动电机运行,达到快慢速行驶,转向控制以及自动停车。
电源模块:电源部分是为整个电路模块提供电源,以便能正常工作。
第二章硬件电路设计2.1 关键元件选择讨论2.1.1 单片机的选择C8051F310器件是完全集成的混合信号片上系统型MCU芯片。
下面列出了一些主要特性:1.高速、流水线结构的8051兼容的CIP-51内核(可达25MIPS)2.全速、非侵入式的在系统调试接口(片内)3.带模拟多路器真正10位200ksps的25通道单端/差分 ADC(C8051F310/1/2/3)4.高精度可编程的25MHz内部振荡器5.16KB(C8051F310/1)或8KB(C8051F312/3/4/5)在系统编程的FLASH存储器6.1280字节片内RAM7.硬件实现的SMBus/I2C、增强型UART和增强型SPI串行接口8.4 个通用的16位定时器9.具有5个捕捉/比较模块和看门狗定时器功能的可编程计数器/定时器阵列10.片内上电复位、VDD监视器和温度传感器11.片内电压比较器(2)12.29/25个端口I/O(容许5V输入)C8051F310原理示意图具有片内上电复位、VDD监视器、看门狗定时器和时钟振荡器的 C8051F310 是真正能独立工作的片上系统。
FLASH 存储器还具有在系统重新编程能力,可用于非易失性数据存储,并允许现场更新8051固件。
用户软件对所有外设具有完全的控制,可以关断任何一个或所有外设以节省功耗。
C8051F310封装图片内Silicon labs二线(C2)开发接口允许使用安装在最终应用系统上的产品MCU进行非侵入式(不占用片内资源)、全速、在系统调试。
调试逻辑支持观察和修改存储器和寄存器,支持断点、单步、运行和停机命令。
在使用C2进行调试时,所有的模拟和数字外设都可全功能运行。
两个C2接口引脚可以与用户功能共享,使在系统调试功能不占用封装引脚。
每种器件都可在工业温度范围(-45℃到+85℃)内用2.7V-3.6V的电压工作。
端口I/O、/RST和JTAG引脚都容许5V的输入信号电压。
C8051F31X有32脚LQFP封装和28脚 MLP封装。
设计单片机及外围电路电路原理图2.1.2 传感器的选择传感器是一种能把物理量或化学量转变成便于利用的电信号的器件。
国际电工委员会的定义为:“传感器是测量系统中的一种前置部件,它将输入变量转换成可供测量的信号”,随着科学技术的发展,机器人的感觉传感器种类越来越多,其中视觉传感器成为自动行走和驾驶的重要部件。
视觉的典型应用领域为自主式智能导航系统,对于视觉的各种技术而言图像处理技术已相当发达,而基于图像的理解技术还很落后,机器视觉需要通过大量的运算也只能识别一些结构化环境简单的目标。
视觉传感器的核心器件是摄像管或CCD,目前的CCD已能做到自动聚焦。
但CCD传感器的价格、体积和使用方式上并不占优势,因此在不要求清晰图像只需要粗略感觉的系统中考虑使用接近觉传感器是一种实用有效的方法。
避障小车是通过传感器系统感知外界环境,在复杂环境中自主移动并完成避障的任务,我们想要实现避障小车的视觉功能有多种方式,可以使用CCD摄像头进行图象采集和识别方法,基于检测对象表面靠近传感元件时的电容变化的电容式接近传感器,根据波从发射到接收的传播过程中所受到的影响来检测物体的接近程度的超声波传感器以及包括一个可以发射红外光的固态发光二极管和一个用作接收器的固态光敏二极管(或光敏三极管)的红外反射式光电传感器。
由于CCD传感器的价格、体积和使用方式上并不占优势,而且红外传感器探测视角小,方向性强一些,测量精度高,价格便宜,而且可以在夜间工作,因此红外传感器可以作为视觉应用于移动机器人避障。
基于上述要求,传感检测部分考虑到小车一般不需要感知清晰的图像,只要求粗略感知即可,所以可以舍弃昂贵的CCD传感器而考虑使用价廉物美的红外反射式传感器来充当。
我们这次采用的小车传感器是红外位置传感器,用漫反射式光电开关进行避障。
红外线光电开关(光电传感器)属于光电接近开关的简称,它是利用被检测物体对红外光束的遮光或反射,由同步回路选通而检测物体的有无,其物体不限于金属,对所有能反射光线的物体均可检测。
漫反射式光电开关是一种集发射器和接收器于一体的传感器,当有被检测物体经过时,将光电开关发射器发射的足够量的光线反射到接收器,于是光电开关就产生了开关信号。
2.1.3 电机类型的选择电动机的作用是将电能转换为机械能,电动机分为交流电动机和直流电动机两大类,所以我们在避障小车的电机选择上就有步进电机和直流电机两种选择方式,现介绍如下:(1)交流电机的优点是具有快速启停能力,如果负荷不超过步进电机所能提供的动态转矩值,就能够立即使步进电机启动或反转。
另一个优点是转换精度高,使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
(2)直流电动机的优点是具有良好的调速性能,可以用于许多调速性能要求较高的场合调速范围宽广,调速特性平滑,过载能力较强,热动和制动转矩较大。
通过上述比较,虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
步进电机价格较高,驱动方面也较复杂,由于我们设计的小车对于精度要求不是特别高,电路和控制相对简单,同时价格低廉所以我们最后还是选择选择直流电机。
2.1.4 电机驱动电路的选择我们在设计小车的电机驱动电路的过程中,通过在网络和图书室中查阅相关资料,我们的选择可以分为3种,分别介绍如下:(1)使用功率三极管作为功率放大器的输出控制直流电机。
它的优点在于线性型驱动的电路结构和原理简单,成本低,加速能力强,但是缺点也十分明显,如功率损耗大,特别是低速大转距运行时,通过电阻R的电流大,发热厉害,损耗大,对于小车的长时间运行不利。
(2)采用继电器对电动机的开或关进行控制,通过开关的切换对小车的速度进行调整.这个方法的优点是电路较为简单,缺点是继电器的响应时间慢,易损坏,寿命较短,可靠性不高。
(3)采用由双极性管组成的H桥电路,用单片机控制晶体管使之工作在占空比可调的开关状态,精确调整电机转速。
这种电路由于工作在管子的饱和截止模式下,效率非常高,H桥电路保证了可以简单地实现转速和方向的控制,而且它的电子开关的速度很快,稳定性也很高,是一种广泛采用的调速技术。
通过上述比较后,我们在选择时候选择的是方式3,采用由双极性管组成的H桥电路的驱动电路。
下面我们对H桥驱动电路进行简短的介绍分析:图2-1所示为一个典型的直流电机控制电路。
电路得名于“H桥驱动电路”是因为它的形状酷似字母H。
4个三极管组成H的4条垂直腿,而电机就是H中的横杠(注意:图2-1及随后的两个图都只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来)。
如图所示,H桥式电机驱动电路包括4个三极管和一个电机。
要使电机运转,必须导通对角线上的一对三极管。
根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。
图2-1 H桥驱动电路要使电机运转,必须使对角线上的一对三极管导通。
如图2-2所示,当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经Q4回到电源负极。
按图中电流箭头所示,该流向的电流将驱动电机顺时针转动。
当三极管Q1和Q4导通时,电流将从左至右流过电机,从而驱动电机按特定方向转动(电机周围的箭头指示为顺时针方向)。
图2-3所示为另一对三极管Q2和Q3导通的情况,电流将从右至左流过电机。
当三极管Q2和Q3导通时,电流将从右至左流过电机,从而驱动电机沿另一方向转动(电机周围的箭头表示为逆时针方向)。
图2-2 H桥驱动电机顺时针转动图2-3 H桥驱动电机逆时针转动驱动电机时,保证H桥上两个同侧的三极管不会同时导通非常重要。
如果三极管Q1和Q2同时导通,那么电流就会从正极穿过两个三极管直接回到负极。
此时,电路中除了三极管外没有其他任何负载,因此电路上的电流就可能达到最大值(该电流仅受电源性能限制),甚至烧坏三极管。
基于上述原因,在实际驱动电路中通常要用硬件电路方便地控制三极管的开关。
图2-4所示就是基于这种考虑的改进电路,它在基本H桥电路的基础上增加了4个与门和2个非门。