4-单自由度系统的受迫振动
振动理论04(3)-单自由度系统受迫振动

71
2014/10/22
阻尼能量耗散
能量耗散通常可以在周期振荡条件下予以确定
如果画成曲线,不同的阻尼类型对应的力和位移的关系差 别会很大,然而,各种情况下的力-位移曲线一定会形成包 围一定面积的一个闭合区域,称为滞后回线, 其面积与每周 耗散的能量为比例
由阻尼力 导致的每周能量损失可以为
对于有粘性阻尼的弹簧-质量系统,阻尼力为
90
2014/10/22
利用里沙茹图形测量简谐振动频率的接线示意图
振动体的振动信号经过传感器和放大器接到电子示波器的Y轴输入端,而在X 轴输入一个已知的周期信号
示波器的显示屏上将形成里沙茹图形 改变输入信号的频率,使里沙茹图形成为一个稳定的椭圆,从信号器上读得的
输入信号的频率就是被测振动的频率 测量精度主要取决于信号发生器的频率精度 利用这一原理,还可以测量相位差
加速度计的频幅特性
对于无阻尼加速度计,振幅迅速随频率增大,可用的 频率范围很小
如果阻尼比
,有用的测量范围
,误
差小于1.005.01%
2
1
1.00
1
0.95 0
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
振动测量仪器
振动测量仪器的基本构件是如下图所示的地震元件 根据要测量的频率范围,图中悬挂质量的相对运动可
7
C
6
如果
5
4
y0 a0
3
振动加速度计的
2
固有频率应该是
所记录测量的最 1
B
高频率的2倍以上 0 A
0
1 /n
2
3
振动加速度计-振幅
为了避免被测振动中含有的高阶谐振共振影响振动加 速度计工作,必须在振动加速度计中加入阻尼
单自由度系统在简谐激励下的受迫振动.ppt
Solution of the above equation gives the amplitude and phase angle of the steady state response of the damped mass-spring system under harmonic excitation:
幅频特性与相频特性
ψ 的讨论
1、 = 0 的附近区域 (低频区或弹性控制区) ,β 1 =0,响
应与激励同相;对于不同的 值,曲线密集,阻尼影响不大。
2、 >>1的区域(高频区或惯性控制区), ψ π ,响应与 β 0, 激励反相;阻尼影响也不大。 3、 =1的附近区域(共振区), 急剧增大并在 =1略为偏左 处有峰值。通常将=1,即 = pn 称为共振频率。阻尼影响 显著且阻尼愈小,幅频响应曲线愈陡峭,峰值越大。 4、在相频特性曲线图上,无论阻尼大小, =1时,总有, = /2 ,这也是共振的重要现象。
-曲线族-幅频特性曲线 -曲线族-相频特性曲线
2.1.2 受迫振动的振幅B、相位差 ψ 的讨论
-曲线族-幅频特性曲线;-曲线族-相频特性曲线
在低频区和高频区,当 <<1时,由于阻尼影响不大 , 为了简化计算 ,可将有阻尼系统简化为无阻尼系统。
2.1.2 受迫振动的振幅B、相位差
z Zei ( t ) (Ze i )ei t
Substituting into Eq., we obtain
and
x ( Ze
i
Ze
i
m 2Y k m 2 i c
Y )e
i t
k i c i t ( ) Ye k m 2 i c
振动理论讲义第4章 单自由度系统受迫振动
图 4.1 电磁式振动台
当励磁线圈通以直流电流时,导磁体就形成恒定磁场。当在这种磁场中的振动线圈
有交流电通过时,便受到交变电磁力的作用,使支承在平板弹簧上的导杆以及与导杆联
在一起的台面等在磁场中振动。
由于振荡器供给的交流电是正弦波,产生的电磁力也是简谐力,可用
表示。其频率 和幅值 都可以调节,从而使台面能以不同的频率和振幅作上下振动。
将振动线圈、导杆、台面等简化为集中质量 ,平板弹簧为具有刚度 的弹性元件,
并考虑各部分的阻尼作用,用 表示相应的阻尼系数,振动台可以简化成图 4.1b 所示的
单自由度有阻尼的质量弹簧体系,受
的简谐激励。
4.2 无阻尼受迫振动
进一步分析(4.5)式表示的含义。显然, 是一个具有振幅为
的正弦
波,该振幅取决于频率比 。
图 4.2 常幅 变 频力作用于质量 上的系统绝对运动 共振图
当
时,纵坐标(即振幅)是负值,如何理解负振幅的意义?考虑到
上式表明,“负振幅”相当于与原波相位差为 180 度。在物理上,它表示,当
,
力和运动同相,质量在平衡位置下面而力又向下推质量;而当
以表示为
⁄
假定 和 比较接近,例如
/
,则
⁄
/
⁄
/
在 很小的情况下,括号中的第二项可以忽略,因此
⁄
/
/
这是拍的方程。当激振频率和固有频率相等,即
/
,有
即为振幅随时间发散的振动方程。当然,在共振情况下的振幅发展到无穷大是需要一定 时间的。
4-4
4.3 外力的振幅取决于频率的情况
前面讨论的问题中,外力的振幅 是独立于其频率 的。工程中常见的还有振幅 取
结构动力学习题答案

结构动力学习题答案在结构动力学中,习题答案通常涉及对结构在动态载荷下的行为进行分析和计算。
这些习题可能包括自由振动分析、受迫振动分析、随机振动分析、模态分析、响应谱分析等。
以下是一些典型的结构动力学习题答案示例。
习题一:单自由度系统的自由振动问题:一个单自由度系统具有质量m=2kg,阻尼系数c=0.5N·s/m,弹簧刚度k=800N/m。
初始条件为位移x(0)=0.1m,速度v(0)=0。
求该系统自由振动的位移时间历程。
答案:首先,确定系统的自然频率ωn:\[ \omega_n = \sqrt{\frac{k}{m}} = \sqrt{\frac{800}{2}}\text{ rad/s} \]然后,计算阻尼比ζ:\[ \zeta = \frac{c}{2\sqrt{mk}} = \frac{0.5}{2\sqrt{2 \cdot 800}} \]由于ζ < 1,系统将进行衰减振动。
可以使用以下公式计算位移时间历程:\[ x(t) = A e^{-\zeta \omega_n t} \cos(\omega_d t + \phi) \] 其中,\( \omega_d = \sqrt{\omega_n^2 - \zeta^2 \omega_n^2} \) 是阻尼频率,A是振幅,\( \phi \)是相位角。
初始条件给出x(0)=0.1m,v(0)=0,可以解出A和\( \phi \)。
最终位移时间历程的表达式为:\[ x(t) = 0.1 e^{-\zeta \omega_n t} \cos(\omega_d t) \]习题二:单自由度系统的受迫振动问题:考虑上述单自由度系统,现在施加一个简谐力F(t)=F_0sin(ωt),其中F_0=100N,ω=10 ra d/s。
求系统的稳态响应。
答案:稳态响应可以通过傅里叶级数或直接应用受迫振动的公式来求解。
对于简谐力,系统的稳态响应为:\[ x_{ss}(t) = \frac{F_0}{k - m\omega^2} \sin(\omega t + \phi) \]其中,\( \phi \) 是相位差,可以通过以下公式计算:\[ \phi = \arctan\left(\frac{2\zeta\omega}{\omega_n^2 -\omega^2}\right) \]习题三:多自由度系统的模态分析问题:考虑一个二自由度系统,其质量矩阵M和刚度矩阵K如下:\[ M = \begin{bmatrix} m_1 & 0 \\ 0 & m_2 \end{bmatrix},\quad K = \begin{bmatrix} k_1 & -k_c \\ -k_c & k_2\end{bmatrix} \]其中,\( m_1 = 2kg \),\( m_2 = 1kg \),\( k_1 = 800N/m \),\( k_2 = 1600N/m \),\( k_c = 200N/m \)。
结构力学单自由度体系强迫振动

l3 4 EI
A16 FPl3 7 4EI.
3
FFPPssiinnω3 4t t
l
3mm 2
l 2
l
求质点处的最大动位移及最大动弯矩图,EI=常数
l3 4 EI
A1619FPl3 7 48EI .
FI 1298FPsint
FPsint
m
l/ 2
l/ 2
4 EI
3ml 3
求质点m处的最大动位移及最大动弯矩图,EI=常数
0
t<0
FP0
t
FP(t)= FP0 0<t<u
u
0 t> u
.
阶段Ⅰ: ( 0≤t ≤ u ) y(t) = yst (1- cosωt)
FP(t)
yt2yst
sint
2
2
FP0
u
.
阶段Ⅰ: ( 0≤t ≤ u )
yt2yst
sint
2
2
ytmax
2yst
2yst
sinu
2
2
.
U≥T/2 U≤T/2
FP(t)
• m ÿ+ k y = F P(t)
•y•(t)2yFPt
m
.
二、动荷载作用在结构的任意位置
FP(t)
••
m y
m
y
.
• 动位移方程:y(t)(m•y•)11FPt1P
若令等效荷载 FP'tFPt111P 只对质点位移等效
•y•(t)2yFP't 运动微分方程的标准
m 表达式(强迫振动)
2
3
A
l/2
l/2
2l3 3 EI
第13例谐响应分析实例—单自由度系统的受迫振动

第13例谐响应分析实例—单自由度系统的受迫振动单自由度系统是动力学中的一个基本模型,用于描述质点或弹性系统在其中一方向上的振动。
在实际应用中,往往会遇到系统受到外力作用的情况,这时系统的运动方程称为受迫振动方程。
本文将基于第一章学习的单自由度系统的动力学原理,通过一个实际的例子,展示如何利用谐响应分析方法来解决单自由度系统的受迫振动问题。
假设一个质量为m的小球通过一根无摩擦的弹簧与固定点相连,并受到一个周期性外力的作用。
我们的目标是求解小球的运动方程,并分析系统在谐响应下的特性。
首先我们需要建立系统的动力学方程。
根据牛顿第二定律,可以得到受迫振动方程:m*a + c*v + k*x = F0*sin(ω*t)其中,m是小球的质量,a是小球的加速度,c是阻尼系数,v是小球的速度,k是弹簧的刚度,x是小球与平衡位置的位移,F0是外力的振幅,ω是外力的角频率,t是时间。
根据系统的初始条件,可以得到小球的初始位移和初始速度:x(0)=x0,为了求解受迫振动方程的特解,假设系统在稳态下的解为:x = A*sin(ωt + φ).将上式代入受迫振动方程,可以得到A和φ的关系式:A*[(-mω^2 + k)*sin(ωt + φ) + cω*cos(ωt + φ)] =F0*sin(ωt).由于上式中左右两侧的正弦项和余弦项的系数相等,根据同角正弦和余弦函数的和差公式,可以得到:A*[(-mω^2 + k)*sinφ + cω*cosφ] = F0,为了使得上述两个方程成立,可得到A和φ应满足的条件:解以上方程可以得到稳态下的解A和φ。
得到稳态解之后,我们可以分析系统的振动特性。
首先,可以计算出系统的谐响应函数:谐响应函数H(ω)描述了系统在不同外力频率下的响应强度。
图像的幅频响应特性被称为频率响应曲线。
为了绘制频率响应曲线,我们可以通过改变外力的频率ω来计算不同的稳态解A,进而得到H(ω)的数值。
其次,还可以分析系统的幅频特性。
第三讲(单自由度系统受迫振动)

四、单自由度系统在周期性激励作用下的受迫振动 1、谐波分析与叠加原理 2、傅立叶(Fourier)级数法 五、单自由度系统在任意激励作用下的受迫振动 1、脉冲响应函数法或杜哈梅(Duhamel)积分法 2、傅立叶(Fourier)变换法 3、拉普拉斯(Laplas)变换法
三、简谐激励下的受迫振动 1、简谐激励下的受迫振动响应及频谱分析 2、受迫振动的复数求解法--单位谐函数法 3、支座简谐激励(位移激励)引起的振动与被动隔振 4、偏心质量(力激励)引起的振动与主动隔振 5、测振传感器的基本原理
汽车振动学
第三讲
2009年3月2日
汽车振动学
第二章 单自由度系统的振动 (8学时)
2009年1月
第二章 单自由度系统的振动
一、单自由度振动系统 1、振动微分方程的建立 2、振动等效系统及外界激励 3、振动微分方程的求解 二、单自由度系统的自由振动 1、无阻尼系统的自由振动 2、有阻尼系统的自由振动 三、单自由度系统在简谐激励作用下的受迫振动 1、简谐激励下的受迫振动响应及频谱分析 2、受迫振动的复数求解法--单位谐函数法 3、支座简谐激励(位移激励)引起的振动与被动隔振 4、偏心质量(力激励)引起的振动与主动隔振 5、测振传感器的原理
其中
X β = = X0
1 (1 − λ 2 ) 2 + (2ζλ ) 2
称为放大因子
代表稳态响应振幅与最大静位移之比,它不仅随频率比而变,而且随阻尼比而变。 如果系统无阻尼,则系统的振动响应为 自由振动响应 受迫振动响应
F0 λ F0 x = x0 cos ωnt + sin ωn t − sin ωnt + sin ωt 2 2 k (1 − λ ) k (1 − λ ) ωn & x0
单自由度系统受迫振动

解得
B
h
(n2 2 )2 4 22
tan
2 h n2 2
幅频特性与相频---称为静力偏移 β 为振幅与静力偏移之比,称为振幅比(又称放大因子)。 s 是激励频率与固有频率之比,称为频率比。
由二部分组成: *第一部分振动的频率是自由振动频率 d;由于阻尼的作 用,这部分的振幅都时间而衰减。---瞬态振动
*第二部分以激励频率作简谐振动,其振幅不随时间衰减 -稳态受迫振动。
特解为: 代入方程
B 2 sin(t ) 2B cos(t ) n2B sin(t ) h sin t
arctan
1
1 s
2s3 2 (2s)
2
特系 性统 曲的 线幅
频 特 性 和 相 频
单自由度系统受迫振动/ 受迫振动的过渡阶段
受迫振动的过渡阶段
在系统受到激励开始振动的初始阶段,其自由振动伴随受迫 振动同时发生。系统的响应是暂态响应与稳态响应的叠加
回顾: mx cx kx F0 sin t 显含t,非齐次微分方程
m1
d2x dt 2
m2
d2 dt 2
(x
e sin t)
cx
kx
整理后得系统的微分方程为
(m1 m2 )x cx kx m2e 2 sin t
(m1 m2 )x cx kx m2e 2 sin t
引入 微分方程化为标准形式 解得
令
解得
其幅频特性和相频特性曲线
【例】图示为一测振仪的简图,其中物块质量为 m,弹簧刚度系数为k,阻力系数c。测振仪放在 振动物体表面,将随物体而运动。设被测物体的 振动规律为 xe e sin t 。求测振仪中物块的运动 微分方程及其受迫振动规律。
共振时候最大振幅 公式
共振时候最大振幅公式
1. 单自由度系统受迫振动共振时最大振幅公式推导。
- 对于单自由度系统的受迫振动,其运动方程为m ẍ+c ẋ+kx = F_0sin(ω t),其中m为质量,c为阻尼系数,k为弹簧刚度,F_0为激振力幅值,ω为激振力频率,x 为位移。
- 设稳态解x = Xsin(ω t-φ),将其代入运动方程可得:
- -mω^2Xsin(ω t - φ)+cω Xcos(ω t-φ)+kXsin(ω t-φ)=F_0sin(ω t)。
- 根据三角函数关系展开并整理可得X=(F_0)/(√((k -
mω^2))^{2)+(cω)^{2}},相位角φ=arctan(cω)/(k - mω^2)。
- 当发生共振时,ω=ω_n=√(frac{k){m}}(ω_n为系统的固有频率)。
- 在无阻尼c = 0的情况下,共振时ω=ω_n,此时最大振幅X_max=(F_0)/(k)。
- 在有阻尼c≠0的情况下,将ω=ω_n=√(frac{k){m}}代入X=(F_0)/(√((k -
mω^2))^{2)+(cω)^{2}},可得X_max=(F_0)/(cω_n)。
2. 相关知识点补充。
- 固有频率的物理意义。
- 固有频率是系统本身的一种特性,它只与系统的质量m和刚度k有关(在单自由度系统中)。
例如,对于一个弹簧 - 质量系统,质量越大,固有频率越低;弹簧越“硬”(刚度越大),固有频率越高。
- 阻尼对共振的影响。
- 阻尼会抑制共振时振幅的无限增大。
当阻尼较小时,共振频率接近系统的固有频率,且共振时振幅仍然较大;随着阻尼的增大,共振时的振幅逐渐减小,并且共振频率会略微偏离固有频率。
《理论力学 动力学》 第九讲 单自由度系统的无阻尼受迫振动
单自由度系统的受迫振动理论曾凡林哈尔滨工业大学理论力学教研组本讲主要内容1、单自由度系统的无阻尼受迫振动2、单自由度系统的有阻尼受迫振动1、单自由度系统的无阻尼受迫振动受迫振动在外加激振力作用下的振动称为受迫振动。
km简谐激振力是一种典型的周期变化的激振力。
简谐激振力随时间的变化关系可写成:)sin(j w +=t H F 其中:H 称为激振力的力幅,即激振力的最大值;ω是激振力的角频率;j 是激振力的初相角。
(1)振动微分方程m 取物块的平衡位置为坐标原点,x 轴向下为正。
物块的受力为恢复力F e 和激振力F 。
F e F方程两边同除以m ,并令, 得到:m k =20w H h m=)sin(d d 2022j w w +=+t h x tx ——无阻尼受迫振动微分方程的标准形式解可以写成:12xx x =+x 1 对应齐次方程的通解; x 2 对应的是特解。
齐次方程的通解可写为:)sin(01q w +=t A x 特解可写为:2sin()x b t w j =+将x 2 代入微分方程,得到:)sin()sin()sin(22j w j w w j w w +=+++-t h t b t b 解得:220ww -=hb 微分方程的全解为:)sin()sin(2200j w ww q w +-++=t ht A x 结果表明:无阻尼受迫振动是由两个谐振动合成的。
第一部分是频率为固有频率的自由振动;第二部分是频率为激振力频率的振动,称为受迫振动。
第一部分会逐渐衰减,而第二部分则是稳定的。
0sin()A t w q +220sin()ht w f w w+-1、单自由度系统的无阻尼受迫振动(2)受迫振动的振幅2220sin()hx t w j w w=+-系统的受迫振动为简谐振动,振动频率也等于激振力的频率,振幅大小与运动的初始条件无关,而与振动系统的固有频率ω0、激振力的频率ω、激振力的力幅H 相关。
振动理论04(2)-单自由度系统受迫振动

●谐变化的力在谐位移上的功是●运动较慢时,=, 外力主要用于克服弹簧力,一周中所作功为零●运动较快时,, 外力分量克服阻尼力,一部分功转变为热能●共振时,,外力平衡阻尼力,功全部消耗于阻尼⏹阻尼振幅⏹阻尼消耗的功=外力功⏹⏹共振●这是相位差为的频率下的振幅,接近于最大振幅的频率能量法求解共振振幅每周的能量振幅外力阻尼力0A B C共振时的放大因子共振另一方面,有阻尼振动的对数衰减率近似为 共振时的放大因子用对数衰减率表示为瞬态振动和稳态振动瞬态振动稳态振动特解例题汽车重千克,装在四只弹簧上,在车身重量作用下弹簧下压厘米,四只缓冲器,每只在1厘米/秒的速度时具有阻尼系数千克。
把车子和四只车轮一起安装在一个试验台上,实验台以共振速率上下运动,振幅为厘米。
假定中心时在轴距中心处,试求车身在弹簧上的振幅。
解:rad具有振幅的弹簧顶部的运动相当于在质量上具有振幅的力kgcm●假定弹簧质量体系,由旋转机械的不平衡运动激励,只能竖向运动●不平衡部分用一个离心质量表示,离心距为,角速度为●表示非旋转部分的位移(以静平衡位置为参考),的运动可以表示为考虑阻尼影响的转动失衡2014/10/2232运动平衡方程sinsin这个方程与具有振幅的弹簧顶部运动导致的振动方程是一样的,令, 可直接得到振动的振幅tan332014/10/22进一步,可以写成如下的无量纲关系tan342014/10/22转动失衡受迫振动幅频和相频特性352014/10/22●前面的例子是旋转不平衡发生在单一平面内,现在讨论在几个平面内的平衡情况●静不平衡⏹不平衡质量都在同一平面内,合力是一个单一的径向力⏹这种不平衡可以用静态试验测出来,即把轮-轴架在轨道上,使其停留在某个位置:重心在轴的下方⏹不用转动轮子就可以测得不平衡位置●动不平衡⏹不平衡出现在多个平面内⏹合力是一个集中力和一个摇摆力矩⏹通过旋转转子才能测出转子失衡2014/10/2236平衡机一般来讲,比较长的转子,例如马达的电枢或者汽车的发动机的机轴,汽车的轮毂和轮胎,都可以认为是一系列薄盘组成,每个薄盘都带有不同程度的失衡⏹用于检测并修正转子失衡的机器叫平衡机⏹平衡机包含弹性支承用于通过运动检测不平衡力⏹测得支承振动幅度和相对相位,进而确定转子的不平衡量并进行修正⏹这是一个二自由度问题:转子的平动和转动是同时发生的372014/10/22●在设计机械具体实施上述原理的检测过程的时候,会采用各种振动传感器、光电传感器,测量其振动情况和转速同步信号,确定失衡重点的位置,然后根据需要对转子进行加重法和去重法的对转子进行平衡加工⏹加重法:在不平衡相反方向配上校正重块。
单自由度系统受迫振动
s
0 1 2 3
0
结论:响应的振幅很小
0
F0 i (t ) x e Aei (t ) k
C2.14
§2.1.2 稳态响应的特性
(s)
0
0 .1
( s)
1 (1 s 2 ) 2 (2s) 2
5 4 3 2 1
(3)在以上两个领域 s>>1,s<<1
1 0
1 2
0
s
0
阻尼越弱,Q越大,带 宽越窄,共振峰越陡峭
F0 i (t ) x e Aei (t ) k
C2.19
§2.1.2 稳态响应的特性
( s)
以s为横坐标画出 ( s) 曲线 2 s ( s ) arctan 1 s2 相频特性曲线 (1)当s<<1( 0) 相位差 0
C2.16
§2.1.2 稳态响应的特性
( s)
1 (1 s 2 ) 2 (2s) 2
5 4 3 2
(s)
0
0 .1
max 并不 (5)对于有阻尼系统, 出现在s=1处,而是稍偏左
d 0 ds
max
0.25 0.375 0 .5 1
s 1 2 2
1 2 1 2
180
90
0 0
s
1 2 3
位移与激振力在相位上几乎相同
(2)当s>>1( 0 )
π
(3)当
位移与激振力反相
s 1
0
π 共振时的相位差为 2 ,与阻尼无关
F0 i (t ) x e Aei (t ) k C2.20
《理论力学 动力学》 第九讲 单自由度系统的有阻尼受迫振动
2、单自由度系统的有阻尼受迫振动单自由度系统的受迫振动理论单自由度系统的受迫振动理论(1)振动微分方程kOx②恢复力F e , 方向指向平衡位置O ,大小与偏离平衡位置的距离成正比。
kxF -=e ③黏性阻尼力F d , 方向与速度方向相反,大小与速度大小成正比。
d dd x xF cv ct=-=-物块的运动微分方程为:22d d sin()d d x x m kx c H t t tw =--+方程两边同除以m ,并令:(ω0, 固有角频率) , (δ, 阻尼系数),得到:mk =20w 2c md =2202d d 2sin()d d x x x h t t td w w ++=——有阻尼受迫振动微分方程的标准形式①激振力F , 简谐激振力。
sin()F H t w =H h m =解可以写成:12xx x =+x 1 对应齐次方程的通解; x 2 对应的是特解。
欠阻尼的情况下( δ<ω0),齐次方程的通解可写为:1e )t x A d q -=+特解可写为:)sin(2e w -=t b x ε表示受迫振动的相位角落后于激振力的相位角2、单自由度系统的有阻尼受迫振动单自由度系统的受迫振动理论将x 2 代入微分方程,得到:220sin()2cos()sin()sin()b t b t b t h t w w e d w w e w w e w --+-+-=将等式右边的h sin(ωt )做一个变换,得到:sin()sin[()]h t h t w w e e =-+cos sin()sin cos()h t h t e w e e w e =-+-代入微分方程,整理得到:)cos(]sin 2[)sin(]cos )([220=--+---e w e w d e w e w w t h b t h b 对任意瞬时t ,上式都必须是恒等式,所以有:cos )(220=--e w w h b 0sin 2=-e w d h b 2222204)(wd w w +-=hb 2202tan w w dwe -=于是,微分方程的通解为:e)sin()tx A b t d q w e -=++-式中,A 和θ为积分常数,由运动的初始条件确定。
单自由度系统强迫振动(悬臂梁)
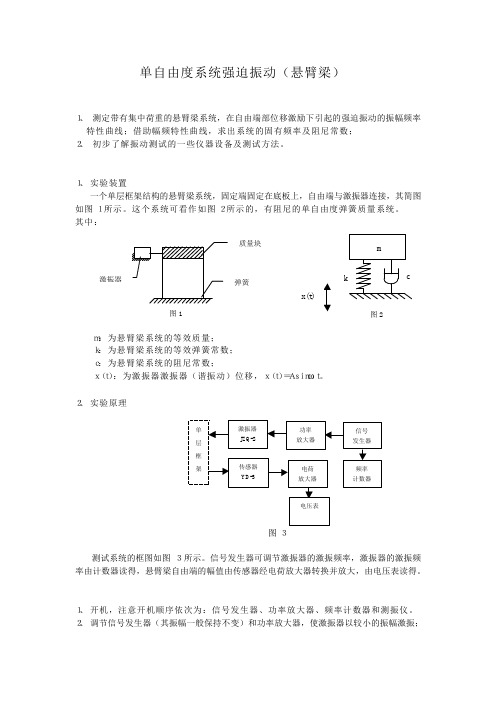
单自由度系统强迫振动(悬臂梁)一、实验目的 1、 测定带有集中荷重的悬臂梁系统,在自由端部位移激励下引起的强迫振动的振幅频率特性曲线;借助幅频特性曲线,求出系统的固有频率及阻尼常数; 2、 初步了解振动测试的一些仪器设备及测试方法。
二、实验装置及原理 1、 实验装置 一个单层框架结构的悬臂梁系统,固定端固定在底板上,自由端与激振器连接,其简图如图1所示。
这个系统可看作如图2所示的,有阻尼的单自由度弹簧质量系统。
其中: m:为悬臂梁系统的等效质量; k:为悬臂梁系统的等效弹簧常数; c:为悬臂梁系统的阻尼常数; x(t):为激振器激振器(谐振动)位移,x(t)=Asinωt。
2、 实验原理 图3 测试系统的框图如图3所示。
信号发生器可调节激振器的激振频率,激振器的激振频率由计数器读得,悬臂梁自由端的幅值由传感器经电荷放大器转换并放大,由电压表读得。
三、实验步骤 1、 开机,注意开机顺序依次为:信号发生器、功率放大器、频率计数器和测振仪。
2、 调节信号发生器(其振幅一般保持不变)和功率放大器,使激振器以较小的振幅激振;激振器然后调节信号发生器的频率,从10-40Hz扫频,使振幅达到最大,即找到系统的共振频率,再轻微调节功率放大器的振幅峰F0,使共振时的位移达到所需振幅。
3、 然后从低频段各点扫描,找出各点频率下对应的位移振幅,频率间隔根据不同情况选取(最好以位移振幅选取),并把各点数据记录表中和填入方格纸中,完成幅频曲线的绘制。
4、 检查幅频曲线的正确与否,偏差较大时,重新找取相应点的数据。
根据图示幅频曲线,由如下关系式计算系统的固有频率和阻尼常数。
5、 关机,把功率放大器的振幅调至最小,然后关闭仪器的电源,关机顺序正好与开机顺序相反。
四、实验数据记录及计算结果 序号 频率 振幅 1 2 …. 按照幅频曲线,运用半功率原理得到: 10 36Frequency Response Function CurveA /A maxf (Hz)1固有频率:m n f f =, 带宽:12f f f −=∆ 相对阻尼系数:nf f2∆=ζ 五、实验要求 1、 实验前必须带好方格纸,在实验过程中,将所测数据填入方格纸中,画出曲线的草图,并让老师检查方可离开。
机械振动第2章-单自由度系统强迫振动
画出相位差随激振力频率的变化曲线(相频曲线)
tan
2 1 2
相频曲线
tan
2 1 2
0.1
0
0.2
0.5
1.0
4.0 2.0
4.0 1.0 0.5 0.2
0.1
相频曲线可看到:相位差总是在0°至180°区间变化,是一单 调上升的曲线。共振时:ω=ωn ε=90 °,阻尼值不同的曲线都 交于这一点。越过共振区之后,随着频率ω的增加,相位差 趋近180°,这时激振力与位移反相。
2 n
h sin(t
)
二阶常系数非齐次线性微分方程
解由两部分组成: x x1 x2 齐次方程的通解为: x1 Asin(nt )
设特解为: x2 bsin(t ) b为待定常数
将x2代入无阻尼受迫振动微分方程,得:
b
2
sin(t
)
b
2 n
s
in(t
)
h
s
in(t
)
解得:
b h
2 n
2
得无阻尼受迫振动微分方程的全解:
b 2 sin(t ) 2nb cos(t ) n2b sin(t ) h sint
将右端改写为:
kc
Fk
Fc
m
F
x
hsint hsin[t ) ]
hcos sin(t ) hsin cos(t )
可整理为:
[b(
2 n
2)
h cos ]sin(t
)
[2nb
mx kx kesint
x s
可见物块的运动微分方程为 无阻尼受迫振动的微分方程。
mx kx kesint
物块的受迫振动形式:
单自由度系统的受迫振动

为品质因子。表征共振峰的陡峭程度
1,相位差为π/2,与阻尼无关
相频特性曲线 θλ
1, 响应与激励同相 1, 响应与激励反相 阻尼越小反响现象越明显
不同形式简谐激励的稳态响应
转子偏心质量引起的受迫振动
ω
系统振动方程
M x cx kx me2 sin t
幅频特性曲线
2
(1 2 )2 (2 )2
1-2-2 周期激励作用的受迫振动响应
对于周期激励
F(t) F(t nT)
(n 0,1, 2)
F
0 F(t)
F
t
0
t
由Fourier级数展开
F (t) Fne int n
Fn
1 T
T
2 F (t)eintdt
T 2
(n 0, 1, 2,)
F (t) an cos nt bn sin nt n
线加速度法
将时间区间[ a , b ]剖分成若干个分点:a = t0 < t1<······< tn= b
ti t0 ihi 时间步长 hi ti1 t i 等时间步长 h ti1 t i
i 0,1, 2,n
假设在第 i 时间间隔[ ti , ti+1 ]内,加速度呈线性变化,即
x
xi
x(0 ) 0, x(0 ) 0
mx cx kx 0
t
0,
x(0 ) 0, x(0 ) 1 m
由冲量定理
mdx (t)dt
0dx 1
0
(t)dt
0
m 0
x(0 ) 1 m
系统对单位脉冲的响应
h(t)
1
md
en t
sin dt
结构动力学之单自由度体系简谐荷载作用下的受迫振动
由初始条件确定 振动由两部分组成: 第一部分按荷载频率 θ 振动,为纯粹的强迫振动; 第二部分按自振频率 ω 振动,为外力引起的自由振动。
变换得: y 2 y
。
即把非直接作用于质体的荷载按照静力位移 等效的条件转换成直接作用于质体的荷载。
等效 12 F (t ) F( t ) 11
2013/12/10
课后练习
F 则运动方程的解为:y 0.6875 2 m 1 1
48 EI ml 3
b)当2 1.2
ymax
F 1 F ml 3 Fl 3 0.6875 0.6875 (2.2727) 0.0326 2 m 1 1.44 m 48EI EI
2013/12/10
有阻尼受迫振动方程解
在外力 p( t ) P sin t 作用下,并且考虑阻尼
2013/12/10
动力系数β
sin t P 即特解部分: y (t ) m 2 (1 2 2 )
令:
p y st p 2 m k
p
1 1Байду номын сангаас 2 / 2
yst为最大静位移,表示将荷载最大值P当作静荷 载作用时结构所产生的位移;
β为动力放大系数或动力系数,表示最大动位移 [y(t)]max 与最大静位移yst 的比值。
课后练习
例2:
F (t ) F sin t 图示跨中带有一质体的无重简支梁,动力荷载
作用在距离左端l/4处,若
第三章-单自由度系统的受迫振动

x = Ae
i (ωt −θ )
F0 i(ωt −θ ) = βe = Bβei(ωt −θ ) ≈ Bei(ωt −θ ) k
振动理论与声学原理
——幅频特性 二、稳态响应的特性——幅频特性
幅频特性曲线 β (s) = 稳态响应的特性:
1 (1− s2 )2 + (2ξs)2
(2)当 s >>1(ω>> ωn ) ( ) 即激振频率相对系统固有频率很高
2ξs θ(s) = arctan 1− s2
(1)当 s <<1(ω<< ωn ) ( )
θ ≈ 0 ,响应与激振力相位几乎相同 (2)当 s >>1(ω>> ωn ) ( )
相位差
ω ) (3)当 s ≈1( ≈ ωn ) (
共振时相位差 θ
相位差 θ ≈ π ,响应与激振力相位几乎相反
≈
π
2
,且几乎与阻尼无关
振动理论与声学原理
四、受迫振动的过渡阶段
由于是线性系统, 由于是线性系统,也适用叠加原理
2 x &&+ωn x = 0 x m&&+ kx = F0 sin ωt = + &(0) = x0 & x(0) = x0 , x & & x(0) = x0 , x(0) = x0 2 2 &&+ωn x = Bωn sin ωt x & x(0) = 0, x(0) = 0
振动理论与声学原理 第三章 单自由度系统的受迫振动
振动理论与声学原理
一、谐波激励的受迫振动
表示, 设外部谐波激振力用复数 F (t ) = F0 e iω t 表示,F0 为其幅 为其频率。 值,ω 为其频率。实部 F0 cos ωt ,虚部 F0 sin ωt 微分方程
第3章 单自由度系统的受迫振动
于 90°。在振动实验中,常以此作为判断振动系统是否处于共振状态的一种标志。 (3) 高频区。当λ>>1, ϕ=180°。表明当激振力频率远远高于固有频率时,受迫振动的相位差接
近与 180°。这说明受迫振动的位移与激振力是反相位的。 应当指出,对于λ=0,当λ<1 时,λ =0;λ>1 时,ϕ=180°;λ=1 时,ϕ角从 0 跳到 180°。 对于不同的阻尼值,相位差ϕ角在 0 到180° 之间变化。 例 3-1 质量为 M 的电机安装在弹性基础上。由于转子不均衡,产生偏心,偏心距为 e,偏心质
pn
(3-10)
绘出对应不同的阻尼比ζ,相位差ϕ随λ变化的曲线族如图 3-2 中的右上角所示,即相频特性曲线。
(1) 低频区。当λ<<1时,ϕ≈0,表明当激振力频率很低或ω<< pn 时,相位差ϕ接近于零,即受
迫振动的位移与激振力几乎同相位。
(2) 共振区。当λ=1时,ϕ=90°。表明当激振力频率等于振动系统的固有频率时,相位差为 90°。
根据达朗贝尔原理,有
− cx& + Mg − k(x + δ st ) − M&x& − meω 2 sin ωt = 0
∴ M&x& + cx& + kx = −meω 2 sin ωt
令
p
2 n
=
k M
,2n
=
c M
,则上式可写成
&x& +
2nx&
+
pn2 x
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1-2单自由度体系的受迫振动主要问题1-2-1简谐激励作用的受迫振动响应1-2-2周期激励作用的受迫振动响应1-3-3任意激励作用的受迫振动响应1-3-5 隔振1-3-4 等效阻尼激励响应系统1-2-1简谐激励作用的受迫振动响应单自由度系统振动方程t F kx x c xm ωsin 0=++ 非自治系统tf x x x n n ωωςωsin 202=++t k F t k F t xt x x n n n n ωλωλλωωωsin 11sin 1sin cos 202000-+--+= 无阻尼系统⎪⎩⎪⎨⎧====+0002)0(,)0(,0sin x xx x t t f x x n ωω方程之解无阻尼自由振动无阻尼受迫振动自由伴随振动瞬态过程稳态过程实际系统中,阻尼的客观存在,随着时间的推移,瞬态响应逐渐衰减,系统进入稳态振动过程系统的瞬态振动过程是复杂的运动形式⇩ελ21+=⇩0→εtt f x n n ωεωεcos sin 20-≈tt f x n n ωωcos 210-≈“拍”无阻尼系统的稳态响应t k F x ωλsin 1120-=kF st 0=δ静变形211λβ-=动力放大因子1<<λ⇩1>>λ⇩1=λ⇩1→β系统表现为静态特征0→β系统表现为动态特征∞→β系统出现“共振”现象θβi e k-=1θβ 阻尼系统的稳态响应tf x x x n n ωωςωsin 202=++ ti nn e f x x x ωωςω022=++ 设系统的稳态响应为ti Bex ω=B 为复振幅)(F H B ω=H (ω)称为复频响应函数222)2()1(1ςλλ+-=212arctanλςλ-=动力放大因子响应与激励的相位差!系统的幅频特性!系统的相频特性⎥⎦⎤⎢⎣⎡+---=2222)2()1(211)(ςλλςλλωi k H系统的稳态响应)(θω-=t i Aex )sin(θω-=t A x βδst A =为系统的实振幅稳态响应的特征幅频特性曲线β-λ⇳稳态响应是与激励同频率的简谐振动⇳稳态响应的幅值和相位差仅由系统的物理参数和激励确定⇳,1>>λ,0→β,1<<λ,1→β振幅为弹簧静变形振幅趋近于零⇳,1>>λ,1→λ,1<<λ阻尼影响不显著振幅对阻尼十分敏感⇳,1→λ振幅急剧增大,出现共振现象动力放大因子为ςβλ211==2021ςωω-=共振频率为⇳为品质因子。
表征共振峰的陡峭程度ςβλ211===Q nςωω2=∆共振区频带宽相频特性曲线θ-λ,1→λ⇳相位差为π/2,与阻尼无关⇳,1>λ,1<λ响应与激励同相阻尼越小反响现象越明显响应与激励反相不同形式简谐激励的稳态响应 转子偏心质量引起的受迫振动ω系统振动方程tme kx x c x M ωωsin 2=++2222)2()1(ςλλλβ+-=⎪⎭⎫⎝⎛-=212arctan λςλθ幅频特性曲线相频特性曲线支承运动引起的受迫振动系统振动微分方程0)()(=-+-+d d x x k x x c xm t ak t ac kx x c xm ωωωsin cos +=++2222)2()1()2(1ςλλςλβ+-+=幅频特性曲线相频特性曲线)2arctan(12arctan 2ςλλςλθ-⎪⎭⎫⎝⎛-=1-2-2周期激励作用的受迫振动响应tFtF对于周期激励)2,1,0()()( =±=n nT t F t F F (t )由Fourier 级数展开∑∞-∞==n tn i neF t F ω)(),2,1,0(d )(122±±==⎰--n t e t F T F T T tn i n ω()∑∞-∞=+=n n nt n b t n at F ωωsin cos )(),2,1,0(d sin )(2,d cos )(22222 ±±===⎰⎰--n tt n t F T b t t n t F T a T T T T n n ωω系统的振动方程∑∞-∞==++n tin neF kx x c xm ω ()⎪⎭⎫⎝⎛+=∑∞-∞=n n n t n b t n a ωωsin cos由叠加原理,系统地稳态响应为[]∑∞-∞=-+-=n n n n n n t n b t n a kt x )sin()cos(1)(θωθωβ∑∞-∞=-=n t n i n n n e F kt x )(1)(θωβ动力放大因子与相位差为()()2222211ςλλβn n n +-=2212λςλθn n n -=将周期激励或响应展成Fourier 级数的分析方法称为谐波分析法。
谐波举例F (t )弹簧-质量系统受周期方波激励。
已知。
1.0,12==ςωπnT 确定系统的响应⎪⎩⎪⎨⎧<<-<<=T t TF T t F t F 220)(00方波激振力)sin 13sin 31(sin 4)(1110++++=t n nt t F t F ωωωπ系统的稳态响应)sin(415,3,10n n nt n kF x θωβπ-=∑∞=如何能形象地表现出任意周期激励的系统响应?工程实际问题中,Fourier展开后的无穷多项如何处理?频谱图频谱分析法的物理意义就是将函数由时间域转到了频率域1-3-3任意激励作用的受迫振动响应F (t )系统振动方程)(t F kx x c xm =++ Ftδ分布函数及其应用定义()τδτδεε-=-→t t 0lim )(且1d )(=-⎰∞∞-t t τδ⎪⎩⎪⎨⎧≠=∞=-τττδt t t 0)(取任意值面积为1⎪⎩⎪⎨⎧+><+≤≤=-εττεττετδεt t t t ,01)(δ分布函数的筛选性质()()()ττδf t d t t f =-⎰∞∞-()()()0f t d t t f =⎰∞∞-δ()()()ττδf t d t t f =-⎰∞=τt≤<τ0δ 函数可以用来描述在时间或空间上一点集中的物理量举例脉冲力作用时间无限短具有有限冲量假设脉冲力P (t )的冲量为U ,定义平均脉冲力)()(t U t P εεδ=冲量为U 的脉冲力P (t ))()(lim )(0t U t P t P δεε==→举例集中力或集中力矩空间上一点集中)()(a x P x P -=δ)()(b x M x M -=δ单位脉冲响应U=1对于冲量为U 的脉冲力)()(t U t F δ=当U =1时,为单位脉冲力)()(t t F δ=系统的振动方程⎪⎩⎪⎨⎧====++--0)0(,0)0(,0)(xx t t kx x c x m δ由冲量定理t t xm d )(d δ= ⎪⎩⎪⎨⎧====++++m x x t kx x c x m 1)0(,0)0(,00⎰⎰+-+-=0000d )(1d t t m x δ mx1)0(=+系统对单位脉冲的响应te m t h d tdn ωωςωsin 1)(-=)()(sin 1)()(ττωωττςω>-=---t t e m t h d t dn 任意激励的受迫振动响应(Duhamel 积分)在时间间隔(τ , τ+d τ)内,激励的脉冲量为F (τ)d τ。
当t >τ 时,系统的响应为τττd )()(d -=t h F x 由线性叠加原理,系统对任意激励的响应为⎰-=tt h F t x 0d )()()(τττ⎰-=tt h F t x 0d )()()(τττ杜哈梅(Duhamel )积分零初始条件下,系统对任意激励的响应为单位脉冲响应与激励的卷积分⎰-=tn nt F m t x 0d )(sin )(1)(ττωτω若无阻尼,则有⎰-=tn n t F m 0d sin )(1ττωτω举例无阻尼弹簧-质量系统在(0 , t 1)时间间隔内受突加矩形脉冲的作用,确定系统的响应。
⎪⎩⎪⎨⎧>≤≤=1100)(t t t t F t F由杜哈梅积分,在(0 , t 1)内,有⎰-=tn nt F m t x 00d )(sin 1)(ττωω)cos 1(0t k F n ω-=当t > t 1时,有⎰-=100d )(sin 1)(t n nt F m t x ττωω[])cos )(cos 10t t t kF n n ωω--=系统响应为[]⎪⎪⎩⎪⎪⎨⎧>--≤≤-=110cos )(cos 0)cos 1()(t t t t kF t t t kF t x n n n ωτωω阶跃激励响应-F 0t 1利用叠加原理t0F (t )F 0对于阶跃激励F (t)=F 0,由杜哈梅积分有)cos 1()(0t kF t x n ω-=而时刻t =t 1的阶跃激励F (t)=-F 0,有⎰--=tt n n t F m t x 1d )(sin )(1)(0ττωω[])(cos 110t t kF n ---=ω叠加得系统在t > t 1时的响应[])cos )(cos )(10t t t kF t x n n ωω--=系统在t > t 1时为自由振动,以t =t 1为自由振动开始时刻,有)cos 1()()(1011t kF t x t x n tt ω-===101sin d d )(1t kF t xt x n n t t ωω=== 系统的自由振动响应为t t xt t x t x n nn ωωωsin )(cos )()(11 +=[])cos )(cos 10t t t kF n n ωω--=脉冲的作用时间t 1 对响应有什么影响?工程设计中最关心的是冲击载荷作用后的最大响应值,如何描述?系统在t > t 1时自由振动的幅值为21212max )()(nt xt x x ω +=2sin 210t k F n ω=Tt k F 10sin 2π=幅值与比值t 1/T 相关⇩当211=T t 时,stkF A δ220==⇩当11=Tt 时,0=A 定义:最大响应值与激励某参数的关系曲线称为响应谱⎪⎩⎪⎨⎧>≤≤=2220sin 211T t T t T t x st m πδ逐步积分法⎰-=tthFtxd)()()(τττ?逐步积分法的基本思想:将计算的时间区间分割,以已知运动量的点为开始时刻,递增地逐点求出各个时间点所对应的运动量。
增加时间,以下介绍几种对加速度的变化规律进行假设的逐步积分法。
特点是利用运动微分方程,由某时刻t 的已知位移,速度,加速度计算出时刻t +△t 相应的各量,并依次进行,逐点求出系统的响应? 对于运动量,如何对其中的一个量进行假设x xx ,,? 对近似计算结果(或计算方法)的优劣线加速度法将时间区间[ a , b ]剖分成若干个分点:a = t 0 < t 1<· · · · · · < t n = bii h i t t +=0ni ,2,1,0=i i i t t h -=+1时间步长等时间步长ii t t h -=+1⎪⎩⎪⎨⎧+++=++=++++12211161312121i i i i i i i i i xh x h x h x x xh x h x x 假设在第i 时间间隔[ t i , t i+1 ]内,加速度呈线性变化,即()11++≤≤-+=i i i i i t t t hxx x x τht t i≤≤-=ττ0()Chxx x x i i i +-+=+221ττ ()D C hx x x x i i i ++-+=+τττ621312 当i t t =i i i i x t xx t x ==)(,)(i i x D xC ==, 当ht =τ∫∫补充运动微分方程)(211211++++=++i i n i n i t f x x x ωςω ⎪⎪⎪⎩⎪⎪⎪⎨⎧+=-++=-=++++++++++i i i i i i i i i i i i n i n x h x x h x x h x h x x h x t f x x x 21213161)(211212111112ςωω线加速度法的递推公式ΔtΔtΔt⇳线加速度法的计算精度高⇳线加速度法的计算结果是条件稳定时间步长Δt一般要小于振动周期的1/6~1/10计算量大!Lagrange 中值定理若f(x )在[a ,b ]上连续,在(a ,b )可微,则在(a ,b )间至少有一点c ,使bc a c f a b a f b f <<'-=-)()()()(Newmark 法在区间[ t i , t i+1 ]内,由微分中值定理h xx x i i ξ +=+1假设1)1(++-=i i x x x γγξ10<<γ速度Lagrange 中值定理由Tayloy 级数展开221h xh x x x iii η++=+假设12)21(++-=i i xx x ββη120<<β位移⎪⎩⎪⎨⎧+⎪⎭⎫ ⎝⎛-++=+-+=++++21211i 121)1(h x h x h xx x h x h x x xi i i i i i i i ββγγ⎪⎪⎪⎩⎪⎪⎪⎨⎧⎪⎭⎫ ⎝⎛-++=--+=-=++++++++++i i i i i i i i i i i i n i n x h x h x x h x x h x x h x t f x x x 2121111111221)1()(2ββγγςωωNewmark 法的递推公式⇳β 值影响算法精度即为线加速度法⇳当61,21==βγNewmark 法无条件稳定⇳当22141,21⎪⎭⎫ ⎝⎛+=≥γβγ算法引起附加阻尼(数值解周期延长、振幅缩减),21>γ⇳当算法精度高,但条件稳定21=β算法精度低,但无条件稳定41>βWilson-θ 法基本思想引入一个参数,1>θ[]t t t ∆+θ,在更大的时间间隔内,对线加速度法进行修正。