机构运动简图的测绘与分析实验报告
(整理)机构运动简图测绘与分析实验
实验一、机构运动简图测绘与分析实验二、实验预习内容机构组成要素、机构自由度及机构运动简图方面的有关概念,见表1-1。
表1-1常用机构构件、运动副代表符号四、实验方法及步骤1.分析机构的运动情况,判别运动副的性质通过观察和分析机构的运动情况和实际组成,先搞清楚机构的原动部分和执行部分,使其缓慢运动,然后循着运动传递的路线,找出组成机构的构件,弄清各构件之向组成的运动副类型、数目及各运动副的相对位置。
2.恰当地选择投影面选择时应以能简单、清楚地把机构的运动情况表示清楚为原则。
一般选机构中多数构件的运动平面为投影面,必要时也可以就机械的不同部分选择两个或多个投影面,然后展开到同一平面上。
3.选择适当的比例尺根据机构的运动尺寸,先确定出各运动副的位置(如转动副的中心位置、移动副的导路方位及高副接触点的位置等),并画上相应的运动副符号,然后用简单的线条和规定的符号画出机构运动简图,最后要标出构件号数、运动副的代号字母以及原动件的转向箭头。
4.计算机构自由度并判断该机构是否具有确定运动在计算机构自由度时要正确分析该机构中有几个活动构件、有几个低副和几个高副。
并在图上指出机构中存在的局部自由度、虚约束及复合铰链,在排除了局部自由度和虚约束之后,再利用公式计算机构的自由度,检查计算的自由度数是否与原动件数目相等,以判断该机构是否具有确定运动.实验二、齿轮范成原理及齿轮参数测定齿轮加工方法基本上有两种—范成法和仿型法。
由于范成法可以用一把刀具加工出不同齿数和变位系数的渐开线齿轮,同时具有较高的加工精度,故以范成法应用最广。
范成法是利用一对齿轮互相啮合时其共轭齿廓互为包络线的原理来加工齿轮的。
加工时其中一个为刀具,另一个为轮坯,它们和一对真正的齿轮互相啮合传动一样保持着固定的角速比传动,同时刀具还沿着轮坯的轴向作切削运动,这样得到齿轮的齿廓就是刀具刀刃在各个位置的包络线。
若用渐开线作为刀具的齿廓,则包络线必为渐开线.由于实际加工时看不到刀刃在各个位置形成的过程,故通过齿轮范成仪来实现轮坯与刀具间的传动过程,并用铅笔将刀具刀刃的各个位置描绘在图纸上,这时我们就能清楚地观察到齿轮范成的过程。
2-1平面机构运动简图测绘实验报告
平面机构运动简图的绘制与分析实验报告
一、实验目的
(1) 初步掌握绘制平面机构运动简图的方法和技能,并能正确表达有关机构、运动副及构件。
(2) 掌握用平面机构自由度的计算方法,分析机构运动的确定性。
二、实验设备和工具
(1) 各种典型机构、机械的实物或模型;
(2) 钢板尺、钢卷尺、内卡钳、外卡钳、量角器;
(3) 学生自带下列实验用品:纸、笔圆规、橡皮等文具。
三、实验步骤
(1) 观察机构的运动并确定构件数
(2) 判别各构件之间运动副的类别
(3) 绘制平面机构的示意图
(4) 测量与机构运动有关的尺寸并按比例绘制平面机构的运动简图
(5) 计算机构的自由度
(6) 分析机构运动的确定性
四、测绘结果及分析
注:上面所画的三张图中,如有复合铰链、局部自由度及虚约束应在图中指明。
思考题:
1、平面机构简图与平面机构运动简图有何不同?
2、怎样判断你所绘制的运动简图是否正确?。
机构运动简图的测绘和分析

1.在草稿纸上徒手绘制指定的若干机构的简图(运动副的相对位置只需目测,使图形与 实物大致成比例)。其中每位必须画指定的模型。
2.对其中一个机构按一定比例绘制。 3.计算各机构的自由度数,并将结果与实际结构相对照,说明此机构是否具有确定运动。 4.整理、书写实验报告。
机构运动简图测绘实验报告
径节 DP
25.4000 24 22 20.3200 20 18 16.9333 16 14.5143 14 12.7000 12 11.2889 11 10.1600 10 9.2364 9 8.4667 8 7.8154 7.2571 7 6.7733 6.3500 6 5.6444 5.0800 5
6.918
7.007
7.490
7.586
7.610
7.708
8.239
8.345
8.455
8.563
8.989
9.104
9.513
9.635
9.738
9.862
10.487
10.621
10.873
11.012
11.236
11.379
11.986
12.138
12.683
12.845
13.483
13.655
Pb=p m cosa
a=17 .5°
a=15°
2.996
3.034
3.170
3.210
3.461
3.505
3.745
3.793
3.805
3.854
4.228
758
4.819
5.243
5.310
5.435
5.505
5.992
实验一机构运动简图的测绘及分析实验
机械设计基础实验指导书实验一机构运动简图的测绘及分析实验一、实验目的1、熟悉机构运动简图的绘制方法,掌握从实际机构中测绘机构运动简图的技能;2、巩固机构结构分析原理及自由度计算方法;3、加深理解平面四杆机构的演化过程及验证曲柄存在条件。
二、实验设备及工具1、测绘用四种机构实物模型;2、测量用尺、分规、铅笔及草稿纸。
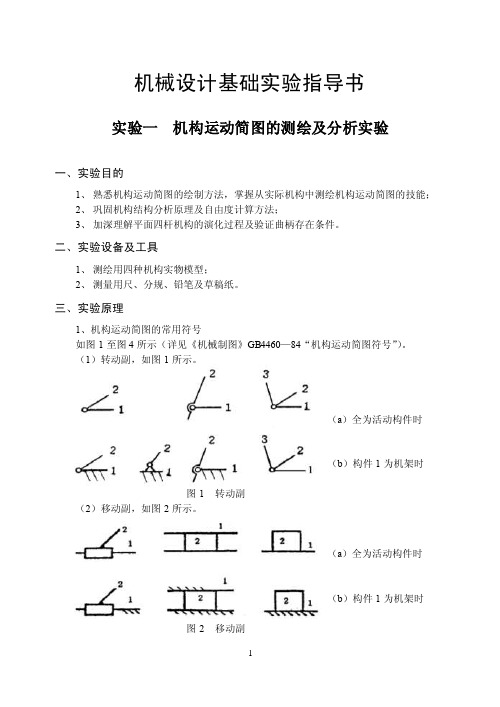
三、实验原理1、机构运动简图的常用符号如图1至图4所示(详见《机械制图》GB4460—84“机构运动简图符号”)。
(1)转动副,如图1所示。
(a)全为活动构件时(b)构件1为机架时图1 转动副(2)移动副,如图2所示。
(a)全为活动构件时(b)构件1为机架时图2 移动副(3)高副,如图3所示。
(a)全为活动构件时(b)构件1为机架时图3 高副(4)构件图例,如图4所示(a)具有两个运动副元素时(b)具有三个运动副元素时(c)具有四个运动副元素时图4 构件图例2、实验原理机构各部分的运动,是由其原动件的运动规律、该机构中各运动副的类型(高副、低副,转动副、移动副等)和机构的运动尺寸来决定的,而与构件的外形、断面尺寸、组成构件的零件数目及固联方式等无关。
所以,只要根据机构的运动尺寸,按一定的比例尺定出各运动副的位置,就可以用运动副的代表符号和简单的线条把机构的运动简图作出来。
正确的机构运动简图中各构件的尺寸、运动副的类型和相对位置以及机构组成形式应与原机构保持一致,从而保证机构运动简图与原机构具有完全相同的运动特性,以便根据该图对机构进行运动及动力分析。
所谓机构运动简图就是从运动的观点出发,用规定的符号和简单的线条按一定的尺寸比例来表示实际机构的组成及各构件间相对运动关系。
3、绘制机构运动简图的方法及步骤 (1)分析机构的实际构造和运动情况任选原动件并缓慢转动,根据各构件之间有无相对运动,分清机构是由哪些构件组成的;按照机构运动的传递顺序,仔细观察各构件之间相对运动的性质,从而确定运动副的类型和数目。
机构运动简图的测绘实验报告doc
机构运动简图的测绘实验报告篇一:机构运动简图的测绘和分析试验报告实验一机构运动简图的测绘和分析一. 实验目的1. 学会根据各种机械实物或模型,绘制机构运动简图;2. 分析和验证机构自由度,进一步理解机构自由度的概念,掌握机构自由度的计算方法;3. 加深对机构结构分析的了解。
二. 设备和工具1. 各类典型机械的实物(如:缝纫机等)2. 各类典型机械的模型(如:内燃机模型、牛头刨床等);3. 钢皮尺,内外卡钳,量角器(根据需要选用);4. 三角板,铅笔,橡皮,稿纸(自备)。
三. 原理和方法1. 原理由于机构和运动仅与机构中所有的构件的数目的构件所组成的运动副的数目、类型、相对位置有关,因此,在绘制机构运动简图时,可以撇开构件的形状和运动副的具体构造,而用一些简略的符号(如教科书和机械设计手册中有关“常用构件的运动副简图符号”的规定)来代替构件和运动副,并按一定的比例尺表示运动副的相对位置,以此表明机构的运动特征。
表1-1为常用符号示例。
2. 方法(1)确定组成机构的构件数目测绘时使被测绘机械缓慢运动,仔细观测机构的运动,区分各个运动单元,从而确定组成机构的构件数目,找出原动件。
(2)测绘运动副的种类、数目根据相联接两构件的接触情况及相对运动的特点,确定各个运动副的种类。
(3)合理选择投影面,坐标和原动件位置选与机构的各个构件上的点运动平面皆平行的平面,或选能反映机构运动特征的其他平面做投影面。
转动(或移动)原动件,找出每个构件都能表达清楚的原动件位置。
(4)绘机构运动简图的示意图徒手按规定的符号,凭目测,使图与实物大致成比例(转动副位置、移动副导路方位,高副接触点及曲率),从原动件开始,依构件的连接次序,逐渐画出机构运动简图的示意图。
用数字1、2、3??区分构件,用字母A、B、C??区分运动副。
(5)绘正式机构运动简图仔细测量与机构运动有关的尺寸,即转动副间的中心距和移动导路的方向等,按适当的比例尺画出正式机构运动简图。
机构运动简图测绘与分析实验
实验一机构运动简图测绘与分析实验一、实验目的1.根据机构模型,掌握正确绘制平面机构运动简图的方法和技能。
2.验证和巩固机构自由度的计算,进一步理解机构自由度的概念。
3.应用机构自由度的计算方法,分析平面机构运动的确定性。
4.掌握平面机构的组成原理,能够对平面机构进行结构分析。
二、实验设备1、机构模型(铆钉机构B1、简易冲床B2、装订机机构B3、鄂式破碎机B4、步进输送机B5、假肢膝关节机构B6、机械手腕部机构B7、抛光机B8、牛头刨床B9、制动机构B10等);2.所用工具:钢板尺、游标卡尺、三角板、铅笔、圆规、橡皮、纸(除钢板尺和游标卡尺外,其余学生自备)。
三、实验内容1. 选择5种机构模型进行测量,绘制机构运动简图;2. 计算机构自由度,并注明其活动构件数、低副数、高副数,然后代入公式进行计算。
3.对所选择的机构进行结构分析,确定机构的级别。
四、实验原理、方法和手段在对现有机械设备进行分析或设计新的机械设备时,都需要运用其机构运动简图。
而机构各部分的运动是由其原动件的运动规律、该机构中各运动副的数目、类型,运动副相对位置和构件的数目来确定的,而与构件的外形、断面尺寸、组成构件的零件数目及运动副的具体构造等无关。
所以,只要根据机构的运动尺寸,按一定的比例尺定出各运动副的位置,就可以用运动副的代表符号和简单的线条把机构的运动简图画出来。
常用符号见下表:1、机构运动简图的概念抛开构件的复杂外形和运动副的具体结构,利用简单的线条和规定的符号来代表每一个构件和运动副,并按一定的比例将机构的运动特征表达出来的简单图形称为机构运动简图。
机构运动简图与原机构具有完全相同的运动特性,因而可以根据该图对机构进行运动分析和动力分析。
2、测绘方法(1)分析运动情况。
绘制机构运动简图时,首先要把该机器或模型的实际构造和运动情况搞清楚。
为此,先应确定出原动件和从动件,再使被测机器或模型缓慢运动,然后按照运动的传递路线,把原动件和从动件之间的各构件的运动情况观察清楚,尤其应注意有微小运动的构件,分清各构件间的接触情况及相对运动的性质,从而确定组成机构的运动构件数目、联接次序和运动副数目、种类等。
机构运动简图的测绘实验报告(1)

机构运动简图的测绘实验报告(1)机构运动简图的测绘实验报告一、实验目的通过实验,学习并掌握机构运动简图的基本知识和测绘方法,进一步深入理解机构运动的规律和特点。
二、实验原理机构运动简图是指将机构运动中各部分的相对位置和运动方向简单地表示出来的图形。
在测绘机构运动简图时,需要掌握以下基本原理:1.各部分相对距离:该原理是指在机构运动中,各部分之间的距离是始终保持不变的。
因此,在绘制机构运动简图时,需要准确地测量出各部分之间的相对距离。
2.各部分的运动方向:该原理是指在机构运动中,各部分的运动是沿着特定的轨迹进行的。
因此,在绘制机构运动简图时,需要准确知道各部分运动的轨迹,并标出各部分的运动方向。
三、实验器材1.机构模型2.测量工具(卡尺、游标卡尺、直尺等)3.绘图工具(铅笔、彩笔、三角板等)四、实验步骤1.根据机构模型,确定各部分之间的相对距离,并用卡尺等工具进行测量,记录下来。
2.根据机构模型,确定各部分的运动轨迹,并用直尺等工具进行测量,记录下来。
3.根据测量结果,利用铅笔等绘图工具,绘制出机构运动简图,并标注出各部分之间的相对距离和运动方向。
4.比较绘制结果与机构模型,检查是否符合机构运动规律。
五、实验结果与分析通过实验,我们成功地完成了机构运动简图的测绘,并获得了以下结论:1.机构运动简图能够清晰地反映出各部分之间的相对距离和运动方向,为后续操作提供了有力的基础。
2.机构运动简图的绘制需要准确地掌握各部分的相对位置和运动方向,否则就会影响机构运动的正常进行。
六、实验总结机构运动简图是机构设计和运动分析的重要工具之一,通过本次实验,我们深入学习了机构运动简图的基本知识和测绘方法,增强了我们对机构运动规律和特点的理解。
同时,我们也加强了对测量和绘图技能的掌握,为今后的学习和工作打下了坚实的基础。
机构运动简图的测绘及研究分析报告实验

机构运动简图的测绘及分析实验一、实验目的1、熟悉机构运动简图的绘制方法,掌握从实际机构中测绘机构运动简图的技能;2、巩固机构结构分析原理及自由度计算方法;3、加深理解平面四杆机构的演化过程及验证曲柄存在条件。
二、实验设备及工具1、测绘用各种机构实物模型;2、测量用尺、分规、铅笔及草稿纸。
三、实验原理1、机构运动简图的常用符号如图1至图4所示(详见《机械制图》GB4460—84“机构运动简图符号”)。
(1)转动副,如图1所示。
(a)全为活动构件时(b)构件1为机架时图1 转动副(2)移动副,如图2所示。
(a)全为活动构件时(b)构件1为机架时图2 移动副(3)高副,如图3所示。
(a)全为活动构件时(b)构件1为机架时图3 高副(4)构件图例,如图4所示(a)具有两个运动副元素时(b)具有三个运动副元素时(c)具有四个运动副元素时图4 构件图例2、实验原理机构各部分的运动,是由其原动件的运动规律、该机构中各运动副的类型(高副、低副,转动副、移动副等)和机构的运动尺寸来决定的,而与构件的外形、断面尺寸、组成构件的零件数目及固联方式等无关。
所以,只要根据机构的运动尺寸,按一定的比例尺定出各运动副的位置,就可以用运动副的代表符号和简单的线条把机构的运动简图作出来。
正确的机构运动简图中各构件的尺寸、运动副的类型和相对位置以及机构组成形式应与原机构保持一致,从而保证机构运动简图与原机构具有完全相同的运动特性,以便根据该图对机构进行运动及动力分析。
所谓机构运动简图就是从运动的观点出发,用规定的符号和简单的线条按一定的尺寸比例来表示实际机构的组成及各构件间相对运动关系。
3、绘制机构运动简图的方法及步骤(1)分析机构的实际构造和运动情况任选原动件并缓慢转动,根据各构件之间有无相对运动,分清机构是由哪些构件组成的;按照机构运动的传递顺序,仔细观察各构件之间相对运动的性质,从而确定运动副的类型和数目。
(2)合理选择投影面和原动件位置,作机构示意图选择恰当的投影面,一般选择与大多数构件的运动平面相平行的平面为视图平面;合理选择原动件的一个位置,以便简单清楚地将机构的运动情况正确地表达出来。
机构运动简图测绘实验报告

机构运动简图测绘实验报告本次实验旨在通过测绘机构运动简图,探究机构运动的规律和特点。
通过实验,我们将对机构运动的相关知识有更深入的了解,并且能够通过测绘实验报告的形式,将实验结果进行详细记录和总结。
实验材料及方法。
1. 实验材料,测绘仪器、机构运动简图模型、实验记录表。
2. 实验方法,首先,我们准备好测绘仪器和机构运动简图模型,并将仪器校准至标准状态。
然后,根据实验要求,进行机构运动简图的测绘工作。
在测绘过程中,需要准确记录各个位置的坐标和角度,并及时进行数据整理和分析。
实验过程及结果。
在实验过程中,我们按照实验要求,进行了机构运动简图的测绘工作。
通过仔细观察和记录,我们获得了一系列准确的数据,并成功完成了机构运动简图的测绘任务。
在数据整理和分析阶段,我们发现了一些有趣的规律和特点,这些结果将在下文进行详细阐述。
实验总结及结论。
通过本次实验,我们对机构运动的规律和特点有了更深入的了解。
我们发现,在机构运动中,各个部件的位置和角度随着时间的变化而发生规律性的变化,这些变化对机构的整体运动起着重要的作用。
通过测绘实验,我们成功地记录了这些变化,并对其进行了详细的分析和总结。
结论。
1. 机构运动简图的测绘工作是一项重要的实验任务,通过这项工作,我们可以更直观地了解机构运动的规律和特点。
2. 在测绘过程中,需要准确记录各个位置的坐标和角度,以获得准确的数据。
3. 通过数据整理和分析,我们可以发现一些有趣的规律和特点,这些结果对于理解机构运动具有重要的意义。
展望。
在今后的实验工作中,我们将继续深入探究机构运动的规律和特点,通过不断的实验和研究,为机构运动的应用和发展提供更多的科学依据和技术支持。
结语。
通过本次实验,我们对机构运动的规律和特点有了更深入的了解,同时也积累了宝贵的实验经验。
我们相信,在今后的工作中,我们将能够更好地应用这些知识和技术,为机构运动的研究和应用做出更大的贡献。
机构运动简图的测绘与分析实验报告
机构运动简图的测绘与分析实验报告
一、实验报告
机构运动简图的测绘与分析
二、思考题
1.通过本实验,阐述机构运动简图的内涵。
机构运动简图应准确反映实际机构中的哪些项目?
2.绘制机构运动简图时,原动件的位置为什么可以任意选择?会不会影响简图的正确性?
3.机构自由度的计算对测绘机构运动简图有何帮助?机构具有确定运动的条件是什
么?
4.对所测绘的机构能否改进和创意新的机构运动简图?
5.在计算平面机构自由度时应注意哪些事项?
6.机构运动简图与机构示意图的区别?
7.绘制机构运动简图时,选择构件的不同瞬时位置,会不会影响运动简图的正确性?
三、实验心得和建议。
机构简图实验报告
机构运动简图测绘实验报告专业:班级:姓名:成绩:指导老师:实验分组:一、实验目的:1、对运动副、零件、构件等概念建立实感;2、熟悉运动副、构件及机构的表示符号;3、培养依照实验现有模型或机械绘制机构运动简图的能力;4、验证和巩固机构机构自由度的计算。
二、实验内容绘制简易冲床等机构运动简图,并计算其自由度。
三、设备与工具1、各种机构模型;2、圆规、三角板、铅笔、橡皮、白纸、钢板尺。
四、运动简图及分析1)ul2)ul活动构件数低副数pl 高副数ph= 自由度f 机构名称:活动构件数低副数pl 高副数ph= 自由度f 机构名称:3)ul 活动构件数低副数pl 高副数ph= 自由度f 机构名称:4)ul 活动构件数低副数pl 高副数ph= 自由度f 机构名称:5)简易冲床机构模型不要求按比例绘制简图,只画出机构运动示意图即可。
活动构件数n=低副数pl 高副数ph= 自由度f 机构名称:五、思考题1、机构运动简图包括哪些内容?渐开线齿廓范成实验专业:班级:姓名:成绩:指导老师:实验分组:一、实验目的1、掌握用范成法加工渐开线齿轮的原理,观察渐开线齿廓及齿根过渡曲线的形成过程;2、了解渐开线齿廓产生根切现象的原因和用移距修正法避免根切的原理和方法;3、分析比较渐开线标准齿轮和移距变位齿轮的异同点。
二、实验设备和用具 1、渐开线齿廓范成仪;2、钢皮尺、150×150绘图纸一张,绘图铅笔、绘图仪器、三角板、剪刀。
三、原始数据四、齿轮几何参数和尺寸计算:六、思考题:1、为什么齿条刀具的齿顶高和齿根高都等于(ha+c)m;2、为什么具有直线刀刃的齿条刀具能切出齿轮的渐开线齿廓;3、什么叫正变位?什么叫负变位?4、实践中的根切现象是怎样产生的?产生的原因有哪些?避免根切的方法有哪些?﹡﹡篇二:机构简图实验报告机构运动简图测绘实验报告专业:班级:姓名:成绩:指导老师:一、实验目的:1、对运动副、零件、构件等概念建立实感;2、熟悉运动副、构件及机构的表示符号;3、培养依照实验现有模型或机械绘制机构运动简图的能力;4、验证和巩固机构机构自由度的计算。
机构运动简图的测绘与分析实验报告

指导教师签名:
项目
计 算 公 式
标准齿轮计算结果(mm)
变位齿轮计算结果(mm)
结果
备 注
分度圆直径d
齿顶圆直径da
齿根圆直径df齿厚s
分度圆齿槽宽e
最小变位系数xmin
齿形比较
注:“齿形比较”仅定性地说明两个齿轮的齿顶圆齿厚和齿根圆齿厚的差别,不用计算公式来计算;备注中填写变位齿轮相对标准齿轮的变化:增加用“+”号表示;减少用“-”号表示;不变用“0”表示。
实验日期: 年 月 日
一、机构名称:
机构编号: 比例尺μL= m/mm
机构运动尺寸:
机构自由度F=
二、机构名称:
机构编号: 比例尺μL= m/mm
机构运动尺寸:
机构自由度F=
三、机构名称:
机构编号:
机构自由度F=
四、机构名称:
机构编号:机构自由度F=
机构自由度F=
五、机构名称
机构编号:
机构自由度F=
附齿廓范成图
四、实验的心得体会和意见
指导教师签名:
基本机构的运动参数测定实验报告
院专业班级姓名学号
实验日期: 年 月 日
设备编号:
实验记录与理论计算曲线比较
机构示意图
运动尺寸
实测曲线
理论曲线
对比说明
滑
块
速
度
滑
块
加
速
度
曲柄
角
速
度
附图
指导教师签名:
院专业班级姓名学号
实验日期: 年 月 日
设备编号:
简要说明:
齿齿轮实验结果计算及比较项目计算公式标准齿轮计算结果mm变位齿轮计算结果mm结果备注分度圆直径齿顶圆直径da齿根圆直径df基圆直径dbpb分度圆齿厚分度圆齿槽宽e最小变位系数xmin齿形比较齿形比较仅定性地说明两个齿轮的齿顶圆齿厚和齿根圆齿厚的差别不用计算公式来计算
机构运动简图测绘实验报告

机构运动简图测绘实验报告实验目的:
1.了解机构运动的构成和实现方式。
2.掌握简图测量相关理论和技能。
3.通过实践,加深对测绘实验的理解和对测绘数据处理的实际能力。
实验仪器:
1.机床
2.数控系统
3.光学显微镜
4.测量器具
实验原理:
机构运动的工作原理是通过机构构成的图形连续转动来传动动力和信号。
机构本身的转动存在收缩误差,需要进行简图测绘。
简图测绘的理论基础是通过测量角度和距离,精确绘制机构运动图形并进行数据处理。
在测绘过程中需要注意测量角度、确认测量基准点和注意测量工具的精度。
实验过程:
1.搭建机构并进行组成。
2.进行转动并进行测量。
3.采用光学显微镜对测量结果进行观察和校核。
4.利用计算机图形处理软件对数据进行处理。
实验结果:
我们经过实验,测绘出机构运动图形,进行了数据处理并得出结果。
我们发现,由于测量时存在收缩误差,导致测量结果与理论值存在误差。
通过数据处理,我们发现误差范围较小,说明我们的实验操作和数据处理都比较准确。
结论:
通过本次实验,大家掌握了机构运动和简图测绘相关理论和技能,能够进行实践操作并处理数据。
在今后的工作中,我们也需要注意进行测量和数据处理的精度,以保证实验结果的准确性。
(2023)机构运动简图的测绘实验报告(一)

(2023)机构运动简图的测绘实验报告(一)(2023)机构运动简图的测绘实验报告实验目的•掌握测绘机构运动简图的测量方法;•理解机构运动简图的意义和作用;•熟悉使用AutoCAD绘制机构运动简图。
实验原理•机构:由多个连续接合的构件组成的复杂结构;•运动简图:机构运动的简化图形,用于研究机构运动和设计机构。
实验步骤1.将机构按照连续接合的方式拆解成构件;2.测量每个构件的尺寸和相对位置;3.绘制机构运动简图,并标注尺寸和运动关系;4.使用AutoCAD绘制运动简图,使图形更加清晰规范。
实验结果通过实验,我们得到了机构运动简图,并对机构运动和构件的相对位置有了更深入的了解。
AutoCAD绘制的图形更加清晰,便于后续的研究和设计。
实验结论机构运动简图是机械设计中重要的工具,可以用于研究机构运动、分析运动特性和设计机构。
掌握机构运动简图的测量方法和绘制技巧,对于机械设计和机构运动分析都具有重要意义。
实验注意事项1.实验中需注意安全;2.测量时需仔细、准确,确保测量结果的正确性;3.绘图时需认真标注尺寸、运动关系等信息,以便后续研究和设计使用。
参考文献1.计算机辅助机械设计(第二版).孔德成主编.北京:机械工业出版社,2009.2.计算机辅助机械设计与制造技术.刘子辉主编.北京:清华大学出版社,2012.致谢感谢实验教师提供的指导和帮助,让我们更好地掌握了机构运动简图的测量和绘制技术,学会了使用AutoCAD绘制机构运动简图。
同时也感谢同组同学的帮助和合作,让实验过程更加愉快和顺利。
机构运动简图测绘试验报告

机构运动简图测绘试验报告机构测绘试验报告班级:学号:姓名:组号:本组人数:时间:年月日1. 测绘与分析计算第二篇:机构运动简图测绘与分析实验 1500字实验二机构运动简图测绘与分析实验一、实验目的掌握根据实际的机器绘制机构运动简图的方法,学会用机构运动简图表达机械系统设计方案。
二、实验预习内容机构组成要素、机构自由度及机构运动简图方面的有关概念,运动副和构件的代表符号的画法,见表2-1,及机构自由度的计算方法。
三、实验设备及自备用品 1、测绘的机构,参见图2-1。
2、草纸、铅笔、橡皮、直尺、圆规等用品(自备)。
表2-11图2-1 测绘机构四、实验方法及步骤1、分析机构的运动情况,判别运动副的性质通过观察和分析机构的运动情况和实际组成,先搞清楚机构的原动部分和执行部分,使其缓慢运动,然后循着运动传递路线,找出组成机构的构件,弄清各构件之间组成的运动副类型、数目及各运动副的相对位置。
2、恰当地选择投影面选择时应以能简单、清楚地把机构运动情况表示清楚为原则。
一般选机构中多数构件的运动平面为投影面,必要时也可以就机械的不同部分选择两个或多个投影面,然后展开到同一平面上。
23、选择适当的比例尺根据机构的运动尺寸,先确定各运动副的位置(如转动副的中心位置、移动副的导路方位及高副接触点的位置等),并画上相应运动副的符号,然后用简单的线条和规定的符号画出机构运动简图,最后要标出构件号数、运动副的代号字母及原动件的转向箭头。
比例尺:l?实际长度lAB(m) 图上长度AB(mm)4、计算机构自由度并判断该机构是否具有确定运动在计算机构自由度时要正确分析该机构中有几个活动构件、有几个低幅和几个高副。
并在图上指出机构中存在的局部自由度、虚约束及复合铰链,在排除了局部自由度和虚约束后,再利用公式计算机构的自由度,并检查计算的自由度数是否与原动件数目相等,以判断该机构是否具有确定的运动。
机构自由度计算公式为F?3n?2PL?PH五、举例图2-2是回转偏心泵,下面按照实验方法和实验步骤绘制该机构的运动简图,并计算其自由度。
机构运动简图测绘实验报告
机构运动简图测绘实验报告机构运动简图测绘实验报告一、引言在机械工程领域中,机构运动是一项重要的研究内容。
机构运动简图测绘实验旨在通过实际操作和测量,对机构运动进行详细分析和研究。
本报告将介绍我们小组进行的机构运动简图测绘实验的过程、结果和分析。
二、实验目的本实验的主要目的是通过实际操作和测量,掌握机构运动简图的绘制方法,深入理解机构运动的特点和规律。
通过实验,我们将学习如何分析机构的运动学性质,包括角速度、角加速度和运动轨迹等。
三、实验装置和方法实验中我们使用了一台具有多个旋转和平动部件的机构装置。
我们首先观察并记录了机构各个部件的形状、尺寸和连接方式。
然后,我们按照实验要求,选择了几个特定的位置,并使用测量工具(如卡尺、角度尺等)进行了测量。
在测量过程中,我们需要注意保持测量工具的准确性和稳定性。
我们还使用了数学方法和计算机辅助分析软件,对测量数据进行处理和分析。
四、实验结果和分析通过实验,我们得到了机构运动的简图,并进行了详细的测量和分析。
我们发现,机构运动的特点和规律与机构的结构和参数密切相关。
首先,我们测量了机构各个部件的尺寸和位置,并绘制了机构运动的简图。
通过简图,我们可以清晰地看到机构各个部件之间的连接方式和运动方式。
我们还测量了机构运动的周期、速度和加速度等参数,并计算了相关的运动学性质。
其次,我们对机构运动的特点和规律进行了分析。
我们发现,机构运动的周期和速度与机构的结构和参数有密切关系。
例如,当机构中的某个部件长度增加时,机构的周期和速度也会相应增加。
我们还发现,机构运动的加速度与机构的连接方式和运动轨迹有关。
不同的连接方式和运动轨迹会导致不同的加速度曲线。
最后,我们使用计算机辅助分析软件,对机构运动进行了模拟和仿真。
通过模拟和仿真,我们可以更直观地观察和分析机构的运动特点和规律。
我们还比较了实验结果和模拟结果,发现它们基本吻合,验证了我们的实验方法和分析结果的准确性。
五、结论通过机构运动简图测绘实验,我们深入理解了机构运动的特点和规律。
机构运动简图及测绘实验报告

实验报告(机构测绘及运动简图分析)
实验课程:
学生姓名:
学号:
专业班级:
年月日
南昌大学实验报告
学生姓名:学号:专业班级:
实验类型:□验证□综合□设计□创新实验日期:实验成绩:一、实验名称
二、目的
三、设备和工具
四、实验原理
五、实验步骤
六、实验结果
1、机构1名称:
1)、徒手绘制机构运动示意图
2)、测量机构的运动学尺寸
活动构件数n=
=
低副数目P
L
=
高副数目P
H
机构的自由度F=
4)、校核机构自由度的计算结果与实际机构是否相符
5)、绘制机构运动简图
μ m/mm
比例尺=
L
6)、进行机构的结构分析
2、机构2名称:
1)、徒手绘制机构运动示意图
2)、测量机构的运动学尺寸
活动构件数n=
=
低副数目P
L
=
高副数目P
H
机构的自由度F=
4)、校核机构自由度的计算结果与实际机构是否相符
5)、绘制机构运动简图
μ m/mm
比例尺=
L
6)、进行机构的结构分析
七、思考题
1.一个正确的“机构运动简图”应能说明哪些内容?
2.绘制机构运动简图时,原动构件的位置为什么可以任意确定?会不会影响简图的正确性?
3.机构自由度的计算对测绘机构运动简图有何帮助?。