日进伺服驱动器资料(手册)
IS100伺服驱动器使用手册.

前言IS100伺服驱动器用户手册
前言(i
第一章安全信息及注意事项......................................................................- 1 -
1.1安全事项......................................................................................- 1 -
1.2注意事项......................................................................................- 3 -第二章产品信息........................................................................................- 7 -
6.7 FA组显示与故障参数...................................................................- 37 -
6.8 FP组用户参数............................................................................- 41 -第七章应用与调试....................................................................................- 43 -
控制器和电源之间必须有断路器隔开,否则可能发生火警!
请按标准对控制器进行正确规范接地,否则有触电危险!
日立伺服器 交流伺服驱动器说明书
位置偏差 位置指令 位置指令终止点
位置偏差
位置偏差
整定时间(0.84ms)
!"#
!"#$%&'()*+
AHF ! Windows !"#$%&'()* !"#$%&'()* !" !"#$%&'( !"#$ Windows !"#$%&'(%) !"#$ %
!" RS232C ! 32MB !"#$ 30MB !"#$%& 800 600 !"#$% Windows®95/98/Me/2000/XP WindowsNT®4.0
LL 96.5 131.5 100 138 128 166 143 180 157 196.5 187 232.5 207 252.5 214 260 290 336
LR 25
LE 2.5
LG 5
LC 40
LA 46
LZ 4.5
S 8
LB 30
T 3
U 1.8
W 3
LK 14 M3
Y 6L
30
3
7
60
!"#$%&
CE UL c-UL
!"#$%&'( !"#$%&'( !ISO14001 !"
3
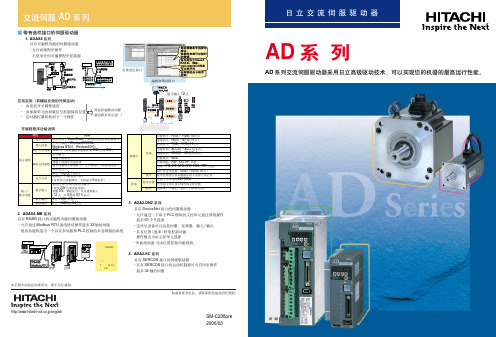
! AD
!"#$%&
! ADMA ! (kW) (min-1) / 17 / / ! 17 / / ! Lead Lead Cannon Cannon Cannon ! 1ø230V/3ø200V 1ø230V/3ø200V 3ø200V 1ø230V/3ø200V 3ø200V 3ø200V !"#$
日进伺服驱动器资料(手册)
日进伺服驱动器资料(手册)(原创实用版)目录1.伺服驱动器的概述2.伺服驱动器的分类3.伺服驱动器的工作原理4.伺服驱动器的性能特点5.伺服驱动器的应用领域6.伺服驱动器的发展趋势正文一、伺服驱动器的概述伺服驱动器,又称为伺服电机驱动器,是一种将电脉冲转换为角位移或线位移的电机控制器。
它通过对电机的转速、转矩和位置进行精确控制,实现对机械运动的精确控制。
伺服驱动器广泛应用于自动化设备、机器人、数控机床等高精度运动控制领域。
二、伺服驱动器的分类根据驱动方式的不同,伺服驱动器可分为以下几类:1.步进电机驱动器:步进电机驱动器是一种基于步进电机的伺服驱动器,其主要特点是运行时无刷设计,结构简单,运行可靠性高。
2.交流伺服驱动器:交流伺服驱动器采用交流电机,具有较高的运行速度和转矩控制精度,适用于高速、高精度的控制场合。
3.直流伺服驱动器:直流伺服驱动器采用直流电机,具有良好的低速性能和较大的起动转矩,适用于低速、大负载的控制场合。
三、伺服驱动器的工作原理伺服驱动器主要通过将输入的电脉冲信号转换为电机的角位移或线位移,实现对电机的精确控制。
其工作原理可概括为以下几个步骤:1.控制器将指令脉冲信号发送给伺服驱动器。
2.伺服驱动器接收到脉冲信号后,将其转换为相应的电压信号,驱动电机旋转。
3.伺服驱动器根据电机的旋转情况,通过反馈系统实时调整电机的转速、转矩和位置,确保运动控制精度。
四、伺服驱动器的性能特点1.高精度:伺服驱动器能够实现对电机的精确控制,提高运动控制的精度。
2.高速度:伺服驱动器具有较高的运行速度,能够满足高速运动的需求。
3.高效率:伺服驱动器具有较高的能量转换效率,能够提高系统的能源利用率。
4.良好的低速性能:伺服驱动器在低速运行时具有较好的性能,能够满足低速、大负载的控制场合。
五、伺服驱动器的应用领域伺服驱动器广泛应用于自动化设备、机器人、数控机床、包装印刷设备、纺织机械等高精度运动控制领域。
交流伺服电机驱动器使用说明书综述
交流伺服电机驱动器使用说明书1.特点●16位CPU+32位DSP三环(位置、速度、电流)全数字化控制●脉冲序列、速度、转矩多种指令及其组合控制●转速、转矩实时动态显示●完善的自诊断保护功能,免维护型产品●交流同步全封闭伺服电机适应各种恶劣环境●体积小、重量轻2.指标●输入电源三相200V -10%~+15% 50/60HZ●控制方法IGBT PWM(正弦波)●反馈增量式编码器(2500P/r)●控制输入伺服-ON 报警清除CW、CCW驱动、静止●指令输入输入电压±10V●控制电源DC12~24V 最大200mA●保护功能OU LU OS OL OH REG OC STCPU错误,DSP错误,系统错误●通讯RS232C●频率特性200Hz或更高(Jm=Jc时)●体积L250 ×W85 ×H205●重量 3.8Kg3.原理见米纳斯驱动器方框图(图1)和控制方框图(图2)4.接线4.1主回路卸下盖板坚固螺丝;取下端子盖板。
用足够线经和连接器尺寸作连接,导线应采用额定温度600C以上的铜体线,装上端子盖板,拧紧盖板螺丝。
螺丝拧紧力矩大于1.2Nm M4或2.0 Nm M5时才可能损坏端子,接地线径为2.0mm2具体见接线图34.2 CN SIG 连接器[具体见接线图4●驱动器和电机之间的电缆长度最大20M●这些线至少要离开主电路接线30cm,不要让这些线与电源进线走一线槽;或让它们捆扎在一起●线经0.18mm2或以上屏蔽双绞线,有足够的耐弯曲力●屏蔽驱动器侧的屏蔽应连接到CN.SIG 连接器的20脚,电机侧应连接到J脚●若电缆长于10M,则编码器电源线+5V、0V应接双线4.3 CN I/F 连接●控制器等周边设备与驱动器之间距离最大为3M●这些线至少和主电路接线相隔30cm ,不要让这些线与电源进线走同一线槽或和它们捆扎在一起●COM+和COM-之间的控制电源(V DC)由用户供给●控制信号输出端子可以接受最大24V或50mA;不要施加超过此限位的电压和电流●若用控制信号直接使继电器动作要象左图所示那样,并联一只二极管到继电器。
伺服驱动器使用说明书

MMT-直流伺服驱动器使用手册济南科亚电子科技有限公司直流伺服驱动器使用说明书一、概述:该伺服驱动器采用全方位保护设计,具有高效率传动性能:控制精度高、线形度好、运行平稳、可靠、响应时间快、采用全隔离方式控制等特点,尤其在低转速运行下有较高的扭矩及良好的性能,在某些场合下和交流无刷伺服相比更能显示其优异的特性,并广泛应用于各种传动机械设备上。
二、产品特征:◇PWM控制H桥驱动◇四象限工作模式◇全隔离方式设计◇线形度好、控制精度高◇零点漂移极小◇转速闭环反馈电压等级可选◇标准信号接口输入0--±10V◇开关量换向功能◇零信号时马达锁定功能◇上/下限位保护功能◇使能控制功能◇上/下限速度设定◇输出电流设定功能◇具有过压、过流、过温、输出短路、马达过温、反馈异常等保护及报警功能三、主要技术参数◇控制电源电压AC:110系列:AC :110V±10%220系列:AC :220V±10%◇主电源电压AC:110系列:AC 40----110V220系列:AC50---- 220V◇输出电压DC:110系列:0—130V或其它电压可设定220系列:0—230V或其它电压可设定◇额定输出电流:DC 5A(最大输出电流10A)DC 10A(最大输出电流15A)DC 20A(最大输出电流25A)◇控制精度:0.1%◇输入给定信号:0—±10V◇测速反馈电压:7V/1000R 9.5V/1000R13.5V/1000R 20V/1000R可经由PC板内插片选定并可接受其它规格订制四、安装环境要求:◇环境温度:-5ºC ~ +50ºC◇环境湿度:相对湿度≤80RH。
(无结露)◇避免有腐蚀气体及可燃性气体环境下使用◇避免有粉尘、可导电粉沫较多的场合◇避免水、油及其他液体进入驱动器内部◇避免震动或撞击的场合使用◇避免通风不良的场合使用五、电源输入说明该驱动系统分两路电源输入:即U1、V1为主电源输入,U2、V2为控制电表1注:1、驱动器的主电源(即U1 V1)独立供电时,若电源开路时,驱动器会报警(面板上的T.F灯亮)待故障排出后,驱动器自动回复正常。
日进伺服驱动器资料(手册)
日进伺服驱动器资料(手册)摘要:一、日进伺服驱动器概述1.日进伺服驱动器的定义2.日进伺服驱动器的作用3.日进伺服驱动器的应用领域二、日进伺服驱动器的工作原理1.伺服系统的组成2.工作原理简述3.控制方式介绍三、日进伺服驱动器的性能特点1.精确控制2.快速响应3.高效率4.高可靠性四、日进伺服驱动器的分类与选型1.分类2.选型要点五、日进伺服驱动器的使用与维护1.使用注意事项2.日常维护3.故障排除六、日进伺服驱动器在我国的发展与应用1.发展历程2.市场规模3.行业应用正文:日进伺服驱动器是一种将接收的电信号转换为精密、快速、高效的转矩或速度输出的驱动装置,广泛应用于工业自动化、机器人、数控机床、航空航天、医疗设备等领域。
日进伺服驱动器的工作原理主要是通过将输入的电信号与设定的目标值进行比较,然后根据误差信号产生相应的控制作用,以实现对运动部件的精确控制。
其核心部分是伺服控制器,它可以根据指令信号和反馈信号,自动调整电机的工作状态,从而确保电机能够精确、快速地响应外部需求。
日进伺服驱动器具有许多卓越的性能特点,如精确控制、快速响应、高效率和可靠性高等。
这些特点使得日进伺服驱动器在各种应用场景中都能发挥出良好的性能。
在选购日进伺服驱动器时,需要根据实际需求进行分类选择,主要分为速度控制型、转矩控制型和位置控制型。
此外,在选型过程中还需要考虑诸如额定功率、额定转矩、额定速度、惯量匹配等因素。
正确使用和维护日进伺服驱动器对于保证设备的稳定运行至关重要。
在使用过程中,要注意避免过载、过热、电压波动等不利因素。
日常维护主要包括清洁、检查和润滑等。
当出现故障时,可以通过故障诊断和排除方法来解决问题。
日进伺服驱动器在我国经过多年的发展,市场规模逐渐扩大,产品种类日益丰富,技术水平不断提高,已经广泛应用于各个行业。
日进伺服驱动器资料(手册)

日进伺服驱动器资料(手册)摘要:一、日进伺服驱动器简介二、日进伺服驱动器的主要特点三、日进伺服驱动器的应用领域四、日进伺服驱动器的操作与维护五、日进伺服驱动器的故障排查与解决方案正文:一、日进伺服驱动器简介日进伺服驱动器是我国自主研发的一款高性能、高可靠性的伺服驱动器。
它集成了先进的控制算法和高效的功率转换技术,为各类自动化设备提供了精确、稳定的控制解决方案。
日进伺服驱动器广泛应用于工业机器人、数控机床、自动化生产线等领域。
二、日进伺服驱动器的主要特点1.高性能:日进伺服驱动器采用先进的控制算法,实现了高速、高精度的定位控制,满足了各类高性能设备的需求。
2.高可靠性:日进伺服驱动器采用了可靠的硬件设计和严格的质量控制体系,保证了产品的长期稳定运行。
3.宽电压范围:日进伺服驱动器支持宽电压输入,适应各种复杂的电网环境。
4.良好的扩展性:日进伺服驱动器支持多种通信接口,便于与其他设备进行集成和扩展。
5.易于调试和维护:日进伺服驱动器提供友好的调试界面和丰富的诊断功能,方便用户进行调试和维护。
三、日进伺服驱动器的应用领域日进伺服驱动器凭借其优异的性能和可靠性,广泛应用于以下领域:1.工业机器人:日进伺服驱动器为工业机器人提供了精确、稳定的控制,提高了生产效率和产品质量。
2.数控机床:日进伺服驱动器在数控机床中实现了高速、高精度的定位控制,提高了加工精度和效率。
3.自动化生产线:日进伺服驱动器在自动化生产线中提供了可靠的控制,降低了生产成本,提高了生产线效率。
四、日进伺服驱动器的操作与维护1.操作:操作日进伺服驱动器时,请按照产品说明书进行,确保正确连接电源、信号和负载。
2.维护:定期对日进伺服驱动器进行清洁和检查,确保设备处于良好的工作状态。
对于易损件,要及时更换,避免影响设备性能。
五、日进伺服驱动器的故障排查与解决方案1.故障排查:当日进伺服驱动器出现故障时,可通过诊断界面进行排查,找出故障原因。
2.解决方案:根据故障原因,采取相应的解决方案,如更换故障部件、调整参数设置、清理灰尘等。
伺服驱动器中文说明书
1.系统描述...................................................................................................................................- 3 -1.1系统布局图.......................................................................................................................................................- 4 -1.2基本原理...........................................................................................................................................................- 5 -1.3设备说明...........................................................................................................................................................- 6 -1.3.1电动缸DEMxB...........................................................................................................................................- 6 -1.3.2接线盒和电缆..........................................................................................................................................- 8 -1.3.3ACV9BR伺服驱动器...............................................................................................................................- 10 -2.技术规格....................................................................................................................................- 16 -2.1电动缸特性.....................................................................................................................................................- 16 -2.2伺服驱动器的技术特性.................................................................................................................................- 18 -2.3附属设备的技术规格.....................................................................................................................................- 20 -2.3.1主电源变压器........................................................................................................................................- 20 -2.3.2再生电阻RRC.........................................................................................................................................- 20 -2.3.3外部过滤器EFBR...................................................................................................................................- 21 -3.安装和接线.............................................................................................................................- 22 -3.1电动缸在塞棒机构上的安装.........................................................................................................................- 22 -3.1.1塞棒机构的准备....................................................................................................................................- 22 -3.1.1.1 塞棒机构固定件的图纸.....................................................................................................................- 22 -3.1.1.2 DEM电动缸在塞棒机构上的正确安装..............................................................................................- 23 -3.1.1.3塞棒机构间隙和阻力的检查..............................................................................................................- 24 -3.1.2电动缸的安装........................................................................................................................................- 26 -3.1.3塞棒的安装............................................................................................................................................- 27 -3.1.4隔热保护................................................................................................................................................- 28 -3.2.1接线盒JB9BR的安装说明.....................................................................................................................- 30 -3.2.2电缆说明................................................................................................................................................- 30 -3.2.3接线推荐规范和CE标准.......................................................................................................................- 32 -3.2.3.1 屏蔽线的接地.....................................................................................................................................- 32 -3.2.3.2 内部金属导体之间的连接.................................................................................................................- 32 -3.2.3.3 接线盒内的电缆连接.........................................................................................................................- 33 -3.2.3.4 驱动器侧的电缆连接.........................................................................................................................- 34 -3.2.4热区电缆的连接....................................................................................................................................- 35 -3.3驱动器ACV9BR的安装和接线.......................................................................................................................- 36 -3.3.1尺寸........................................................................................................................................................- 36 -3.3.2安装、定位和冷却................................................................................................................................- 37 -3.3.3电源的连接............................................................................................................................................- 39 -4.操作........................................................................................................................................- 40 -4.1手动模式.........................................................................................................................................................- 40 -4.2远程工作模式.................................................................................................................................................- 41 -4.3自动模式.........................................................................................................................................................- 41 -4.4塞棒关闭和安全装置.....................................................................................................................................- 42 -4.4.1塞棒关闭................................................................................................................................................- 42 -4.4.2断开电机电源(可选项).....................................................................................................................- 42 -4.5运行故障的处理.............................................................................................................................................- 43 -5.维护........................................................................................................................................- 44 -5.1检查周期.........................................................................................................................................................- 44 -5.2电动缸的检查和维护.....................................................................................................................................- 45 -5.3推荐的备件.....................................................................................................................................................- 49 -5.4伺服驱动器的故障代码.................................................................................................................................- 53 -5.5故障的数字输出代码.....................................................................................................................................- 57 -5.6驱动器复位和状态显示.................................................................................................................................- 58 -5.7没有报警显示时的故障排除.........................................................................................................................- 59 -6.辅助设备.................................................................................................................................- 61 -6.1DEM系列电动缸的测试台..............................................................................................................................- 61 -6.2塞棒机构MQS..................................................................................................................................................- 61 -1.系统描述SERT的塞棒执行器系统用于控制塞棒和塞棒机构的位置,以控制流入结晶器的钢水的流量。
SMH-35 35 35-100-XL 伺服驱动器硬件操作说明书

SMH-35/35/35-100-XL 硬体操作说明书匯出日期:2023-05-10修改日期:2021-04-19•••••••••••••••••••••••目录序言适用机型硬体规格说明外观介绍外形尺寸驱动器规格搬运与安装搬运安装环境条件与注意事项配线与信号周边装置接线图驱动器的连接器与端子说明各式配线图串列向量配线图新代编码器外接类比温感配线图多台四合一串联说明回生电阻选用简易回生电阻选择详细回生电阻选择KTY84温感器与过温度保护功能安装驱动器参数设定版本号编修日期编修内容作者审查核准V1.22022-6-30修正为SMD-34B-3575-xx 硬体操作说明书带电池盒乃维V1.12020-7-23刪去電容吸收能量Ec黃揚程V1.02018/10/04新增SMD-34B-3575-xx 硬体操作说明书杨娟HomePageSYNTEC伺服操作说明书文件资讯文件履历文件资讯文件履历1 序言感谢您长期对本公司产品的使用与支持。
本公司伺服团队不断致力於各项产品的研发,期许本公司产品与服务能给使用者带来最大的效益。
新代高性能驱动器系列产品为本公司最新推出之伺服驱动器,本产品使用高品质之元件与材料,并经过严格测试,采用精密向量控制,具有高精确度、高稳定性、高效率之特性。
本使用说明内容包括驱动器的硬体规格、安装、配线与讯号,能提供给使用者最正确的指引与操作,为充分发挥产品应有的优异性能与维护人员及设备的安全,在使用前请详细阅读本使用手册,并且妥善保存,以备日後调校与保养时使用,若有任何疑虑,请与本公司联络,本公司专业人员将竭诚为您服务。
2 适用机型本操作手册适用於新代SMH-35/35/35-100-XL驱动器3 硬体规格3.1 说明每部驱动器在出厂前均经过详细品管检查与防撞包装处理,请使用者收到产品後应先检查外观有无撞击损伤,并将外盒与产品上之序号做比对是否一致,若有不符,请第一时间与本公司联络。
型号说明3.2 外观介绍SMH-35/35/35-100-XL驱动器功能模块说明A外供电源输入接点连接380V~440V三相交流电(RST) B马达驱动电源输出接点连接马达侧提供马达电源(UVW)由右至左分别为第一至第四轴C煞车电阻接点煞车电阻接点(P-B)D MIII串行通讯接孔连接上位控制器(MIII讯号)连接串行驱动器 (MIII讯号) E Mini USB接孔连接个人计算机调机使用F I/O讯号端口外接电池端口连接I/O设备(急停、警示灯…等)连接绝对型编码器供电电池G STO讯号端口STO接口,2组安全输入,1组安全功能回授H编码器回授接孔由上至下分别为第一至第四埠。
日鼎伺服说明书
安全警告安全标志(1) 警告标识的种类和意义安装、配线施工、维护、检查之前,请熟读和使用该手册及其它附属资料。
请在确认设备知识、安全信息及注意事项后,开始使用。
本手册将安全注意事项的等级划分为“危险”及“注意”。
另外,即使是记载在“注意”中的事项,也有可能因情况不同而导致严重后果。
标有警告标识的正文处均为重要内容,请遵守。
读完该手册后,请将其保管在使用人任何时候都能看到的地方。
(2) 符号根据需要采用符号,以便一看就能理解显示的要点。
安全事项目录第一章概述1.1 产品简介 (1)1.2 确认事项 (2)1.3 伺服驱动器型号说明 (3)1.4 伺服电机型号说明 (3)1.5 产品外观 (5)1.6 铭牌说明 (8)第二章驱动器和电机的安装2.1 伺服电机 (9)2.2 伺服驱动器 (11)2.3 伺服驱动器安装尺寸 (14)2.4 伺服电机安装尺寸 (16)第三章配线及详细说明3.1 驱动器接线图 (19)3.2 供电电源 (21)3.3 指令控制序列输入输出(CN1) (21)3.4 编码器(CN2) (24)3.5 主回路接线 (25)3.6 电线命名规则 (26)3.7 外接制动电阻 (27)3.8 带抱闸电机 (28)3.9 特别注意 (28)第四章伺服参数说明4.1 参数设置 (29)4.2 各模式下相关参数 (29)4.3 全部参数一览表 (32)4.4 参数说明…………………………34 第五章伺服主要操作功能5.1 触摸面板介绍 (62)5.2 参数设置 (62)5.3 模式选择 (63)5.4 功能一览 (63)5.5 顺序监控模式 (64)5.6 监控模式 (64)5.7 参数编集模式 (66)5.8 内部功能模式 (66)第六章伺服通电运行6.1 连接电源 (71)6.2 电机试运行 (71)6.3 基本调整 (75)第七章伺服报警7.1 报警内容 (77)7.2 报警解释 (78)7.3 报警处理方法 (80)7.4 非报警故障处理 (83)第八章外围设备8.1 电源滤波器 (85)8.2 AC电抗器 (86)第九章基本检测与保养9.1 基本检测 (87)9.2 保养 (88)9.2 机件使用寿命 (88)第十章伺服驱动器和电机选型表10.1 伺服电机和驱动器匹配表 (89)第一章概述1.1产品简介伺服系统是以机械参数为控制对象的自动控制系统。
日进伺服驱动器资料(手册)
日进伺服驱动器资料(手册)摘要:1.日进伺服驱动器简介2.日进伺服驱动器的功能与特点3.日进伺服驱动器的应用领域4.日进伺服驱动器的安装与调试5.日进伺服驱动器的维护与故障排除6.日进伺服驱动器的售后服务与支持正文:日进伺服驱动器是一款高性能、高精度的自动化设备驱动器,广泛应用于各种工业生产场景。
本文将为您详细介绍日进伺服驱动器的各项资料与使用手册。
1.日进伺服驱动器简介日进伺服驱动器是一种将电信号转换为精确运动的设备,采用先进的控制算法,实现对电机的精确控制。
日进伺服驱动器具有响应速度快、定位精度高、运行平稳等特点,为各种工业设备提供高效、可靠的驱动解决方案。
2.日进伺服驱动器的功能与特点日进伺服驱动器具备丰富的功能与特点,包括:- 高精度定位:采用闭环控制系统,实现±0.01mm的定位精度;- 快速响应:采用高性能处理器,实现0.1ms的快速响应;- 自动控制:支持自动调谐、自动优化等功能,简化调试过程;- 稳定运行:采用先进控制算法,保证设备在各种工况下的稳定运行;- 环境适应:宽温工作范围,适应各种恶劣环境。
3.日进伺服驱动器的应用领域日进伺服驱动器广泛应用于以下领域:- 数控机床:用于实现高精度、高速度的加工;- 自动化生产线:用于物料搬运、装配、检测等环节;- 机器人:用于工业机器人关节驱动,实现精确控制;- 激光设备:用于激光切割、雕刻、打标等设备;- 纺织机械:用于纺织、印刷、包装等机械设备。
4.日进伺服驱动器的安装与调试日进伺服驱动器的安装与调试步骤如下:- 安装:按照设备安装说明书的要求,正确安装驱动器、电机、负载等部件;- 接线:按照接线图连接电源、信号、控制等线路;- 参数设置:根据设备要求,设置合适的参数,如速度、加速度、定位方式等;- 调试:运行设备,观察运行状态,调整参数,直至满足要求。
5.日进伺服驱动器的维护与故障排除为确保日进伺服驱动器的稳定运行,需要定期进行维护与检查,如:- 定期更换润滑油,保证运行顺畅;- 定期清洁设备,防止灰尘、杂质影响运行;- 定期检查电缆接头,确保接线牢固;- 发现故障时,及时进行排查,如需售后服务,请及时联系日进技术支持。
日进伺服驱动器资料(手册)

日进伺服驱动器资料(手册)
日进伺服驱动器是一种智能驱动器,能够实现精确的位置和速度控制。
以下是关于日进伺服驱动器的基本资料:
1. 产品特点:日进伺服驱动器具有高精度、高响应、高可靠性和高性能的特点。
它通过准确的电流控制,实现驱动电机的位置和速度控制,可以满足各种精密运动控制的需求。
2. 产品型号:日进伺服驱动器有多个型号可供选择,根据需要可以选择不同功率和控制精度的驱动器。
3. 功能特点:日进伺服驱动器具有多种功能特点,包括位置模式、速度模式、力矩控制模式等。
4. 输入输出接口:日进伺服驱动器通常具有多个输入输出接口,可以与外部设备(如编码器、传感器等)进行连接,实现更多功能的扩展和控制。
5. 手动调节功能:日进伺服驱动器一般具有手动调节功能,可以通过手动编码器或按钮进行调节和操作。
6. 保护功能:日进伺服驱动器具有多种保护功能,包括过流保护、过热保护、过载保护等,保证设备的安全和可靠运行。
关于日进伺服驱动器的详细资料,可以参考相关的产品手册或官方网站,其中包含了更多的技术参数、安装指南、操作说明和应用示例等内容。
驱动器说明书手册
SGD7S-120A00A驱动器说明书手册伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
中文名伺服电机外文名Servo motor 类型设备使用场合自动控制系统目录1 工作原理2 发展历史3 选型比较4 调试方法5 性能比较6 选型计算7 制动方式8 注意事项9 特点对比10 使用范围11 主要作用12 优点工作原理编辑1、伺服系统(servo mechanism)是使物体的位置、方位、伺服电机状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。
伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001 mm。
直流伺服电机分为有刷和无刷电机。
有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护不方便(换碳刷),产生电磁干扰,对环境有要求。
因此它可以用于对成本敏感的普通工业和民用场合。
无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。
控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。
日进伺服驱动器资料(手册)

日进伺服驱动器资料(手册)摘要:一、日进伺服驱动器简介1.日进伺服驱动器的概念2.日进伺服驱动器的应用领域二、日进伺服驱动器的性能特点1.高性能、高精度2.高可靠性3.便捷的操控性三、日进伺服驱动器的技术参数1.工作电压2.额定功率3.转矩4.转速5.编码器分辨率四、日进伺服驱动器的安装与维护1.安装步骤2.注意事项3.维护方法五、日进伺服驱动器的使用案例1.应用实例2.成功案例分析正文:【日进伺服驱动器简介】日进伺服驱动器是一种以精确控制为目标,以转矩、转速等物理量为控制对象的驱动设备。
它具有高性能、高精度、高可靠性等特点,广泛应用于各种自动化设备、工业机器人、数控机床等领域。
【日进伺服驱动器的性能特点】1.高性能、高精度:日进伺服驱动器采用先进的控制算法和技术,可实现对电机的高性能、高精度控制,满足各种应用场景的需求。
2.高可靠性:日进伺服驱动器具有优良的抗干扰性能和稳定性,能在恶劣的工况环境中长时间稳定运行,确保设备的正常运行。
3.便捷的操控性:日进伺服驱动器操作简便,用户只需通过控制面板或外部信号输入即可实现对驱动器的操控,降低了设备的操作难度。
【日进伺服驱动器的技术参数】1.工作电压:日进伺服驱动器的工作电压范围广泛,可根据用户需求选择合适的工作电压。
2.额定功率:日进伺服驱动器具有不同的额定功率等级,用户可根据实际需求选择合适的功率等级。
3.转矩:日进伺服驱动器提供不同转矩等级的产品,满足不同负载设备的需求。
4.转速:日进伺服驱动器具有高转速性能,可满足高速设备的需求。
5.编码器分辨率:日进伺服驱动器采用高精度的编码器,实现对电机转速、位置等的高分辨率控制。
【日进伺服驱动器的安装与维护】1.安装步骤:日进伺服驱动器的安装过程需遵循安装说明书的要求,确保设备的正确安装。
2.注意事项:在安装过程中,应注意避免设备受到撞击、潮湿等损害,确保设备的安全稳定运行。
3.维护方法:定期对日进伺服驱动器进行清洁、检查和维护,确保设备的正常运行和延长使用寿命。
Hitachi SJ700系列电机驱动器说明书

Hitachi Industrial Equipment Systems Co.,Ltd.Possible with SJ700 Series Over-current suppress ONSuppresses over current and continues runningImpact loadMotor currentVoltage of the main circuit DCOutput frequencyHigh starting Torque,Powerful Drive and easy setting High starting TorqueTrip avoidance functionOver current &voltage suppress functionImproved Sensorless Vector Control and Auto Tuning produce high starting torque of 200% or more at 0.3Hz.*1Easy setup of motor constantsIdeal for applications which need high torque, such as cranes, extruders and lifts.Higher internal calculation speed improves current control performance.Over-current suppress and Over-voltage suppress functions avoid inverter trips during acceleration and deceleration.Hitachi exclusive0Hz Domain sensorless vector control Develops 150%(SJ700B:120%) *2 torque at 0Hz speed referenceIdeal for cranes and other applications that require high torque upon starting.*2 when inverter is one frame size larger than motor.Position Control Function The SJ700, with optional feedback board installed, together with an encoder-equipped motor can perform position control.For many applications, suitable performance can be achieved at a lower cost than servo systems.Based on your four motion parameters (position command, speed command, acceleration time and deceleration time), the SJ700 will move an object from original position A to target position B. After the movement, the inverter keeps hold motor position.DC Bus AVR Function During DecelerationThe SJ700 controls deceleration time so that the DC busvoltage does not exceed the over-voltage trip level, providing trip-less operation during deceleration.Motor Torque vs. SpeedT o r q u e [%]Speed (min -1)2001000-100-2003006009001200150018000.3HzStarting point A Target point B Over-current suppress OFFOC-TripFrequencyMotor currentSJ700Series Applicable motor SJ700B0.4 to 55kW 75 to 132kW 185 to 400kW 11 to 75kW 90 to 160kW Starting torque 0.3Hz/200%0.3Hz/180%0.3Hz/150%0.5Hz/150%0.5Hz/120%*1 Starting torque*)*)*) Derating is applied for SJ700B. Please consult technician at Hitachi or its distributor before use.For More Precise ControlFor General Purpose Use1High performance, powerful functions, yet user friendly.Inverter control by Built-in Programming functionSequence operation is realized by downloading to an inverter a program created with Hitachi's EzSQ software.Tailor inverter operation to meet changing processrequirements, and replace separate PLCs in some cases.By simplifying or eliminating external hardware, signficant cost savings can be achieved.Password function is incorporated to provide security for proprietary program data against loss or unauthorized modification.Built-in EMC Filter up to 150kW *Cost and space reduction compared with external EMC Filter.Reduces electromagnetic noise.Meets EN61800-3 2nd-Environment*SJ700: European Version and Japanese Version does not have 150kW SJ700B: All models 5.5kW is without EMC FilterBrake circuit up to 22kW*Cost and Space reduction compared with external Braking Controller.*SJ700B: Up to 30kWEMC Filter & Brake circuit integrated as StandardProgramming [EzSQ: Easy Sequence] functionExample (SJ700-110HFEF2)Frequency [Hz]L e v e l [d b ]Typical Example - Replacing External Relay CircuitItemDescriptionL a n g u a g e S p e cI /O f u n c t i o nR e s e r v e d w o r dLanguage type BASIC LikeSupported DeviceWindows(DOS/V)OS:Windows2000, WindowsXP)Programming environmentEditor(Windows), Display(Windows)Programmable flow control <Loop, Unconditional jump, conditional jump, Time control, Sub routine, Others>Operation command <+,-,,*, /, substitution, mod, abs>I/O control(Bit input, Word input, Bit output, Word output)Timer control <on delay, off delay>Inverter parameter setting UserU(00)-U(31)/32 point TimerUL(00)-UL(07)/8 pointSet frequencySET-Freq Acceleration time ACCEL Deceleration time DECELMonitorOutput frequency, Output current, Rotation direction, PID feedback, Converted frequency, Output torque, Output voltage, Power, Cumulative RUN time, Cumulative power-on time, trip General-purpose input contact X(00)-X(07)/8 pointGeneral-purpose output contact Y(00)-Y(05)/6 point(1 point is relay output)UB(00)-UB(07)/8 point Internal user TD(0)-TD(7)/8 pointInternal timer contactIn a remote operator display code.Inverter input and outputSyntax check(Windows)Program download/upload, All clearInterpreter 2.0ms/command (Sub routine supported. 8 nested)Memory area Executable format External input External outputCommandVariable1,024 steps or 6k byte(Smaller of these)Program is stored in internal of inverter.External digital contact inputExternal analoginputGeneral-purposeoutput terminal Contact signal/Open collector signal input (Internal DC24V power supply available)Program RUNcommand FW terminal is reservedGeneral-purpose inputMaximum of 8 point(X(00)-X(07))XA(0) : 0-10V (O terminal)XA(1) : 4-20mA (OI terminal)XA(2) : 0-10V (O2 terminal)External analog outputYA(0) : Setup for FM terminal is possible.YA(1) : Setup for AM terminal is possible. YA(2) : Setup for AMI terminal is possible.Maximum of 8 point(Y(00)-Y(05))QP: Quasi Peak*Windows ®is a registered trademark of Microsoft Corporation.U.S.A and other countries.130120110100908070605040302010150k 200k500k 1M 2M 5M 7M 10M 20M 30M EN61800-3 2nd Envinment[C3]QP Limit LevelStandard InverterSJ700 Using EzSQEzSQ ProgrammingProgramming WindowDownload2Ease of MaintenanceEasy OperationField replacement of cooling fan(s) and DC bus capacitors can be accomplished in a fraction of the time.Using Logic terminal move to SJ700 without wiring change.Read SJ300 Parameter by SRW remote operator and write them in to SJ700Allows display of only parameters changed from default.A serial RS-485 Modbus-RTU port is standard.The SJ700 can communicate with DeviceNet,PROFIBUS-DP, and other networks with communication options.-DeviceNet is a trade mark of Open DeviceNet Vender Association, Inc. -PROFIBUS-DP is a registered trade mark of PROFIBUS Nutzer OrganizationLong life time components & Life time warning functionLong life time componentsDesign lifetime 10 Years or more for DC bus capacitors & Cooling Fan.Cooling Fan ON/OFF control function for longer fan life.*Ambient temperature: Average 40 deg C (SJ700B: 30 deg C) (no corrosive gases, oil mist or dust)Design lifetime is calculated, and not guaranteed.Life time warning functionPerform preventive maintenance before a failure occurs using the Lifetime Warning function.DC bus capacitor, cooling fan, heat sink temperature and motor temperature can be monitored in order to replace components prior to failure.Easy-removable DC bus Capacitors (SJ700: above 15kW S J700B: above 18.5kW)Easy-removable Cooling FanSJ300seriesSJ700seriesNetwork compatibilityParameter read writeRemovable Control circuit terminals (Move to SJ700 without rewiring)Data comparison function-The direct input of function code selection is possible rather than scrolling through the list.-Holding down the function key for 3 seconds, causes the display to jump to output frequency monitor (d001) mode from any menu location.Other FunctionsBasic display mode for commonly used parameters.Basic mode (default)Display of up to 12 User Defined Parameters U001 to U012.User selected functionBasic modeChose Basic ParameterIndication only Basic ParameterEasy-removable construction for maintenanceUser selection of Displayed ParametersSimple & Low cost wiring, Ease of installation and replacement*1 Control circuit terminals comparison tableSeries Input terminalsSJ700SJ700B SJ300L300POutput terminals5terminals(Open collector outputs)2terminals (Relay outputs)9terminals (Intelligent 8terminals,FW)6terminals(Intelligent 5terminals,FW)3Conformity to global standardsCE, UL, c-UL, C-Tick approvals.Micro Surge Voltage suppress functionWide Input power voltage rangeInput voltage 240V for 200V class and 480V for 400V class as standard.Logic input & output Terminal apply sink & source logic Environmental FriendlinessGlobal standardsMotor terminal voltageE=650V, cable=100mEU RoHS compliantEU RoHS compliant (except solder in power module)Improvement of environmentVarnish coating of internal PC board & plating of main circuit copper bus bar are standard.Versatile FunctionsInstantaneous Power Failure Disregard FunctionThe SJ700 override instantaneous power failure when power fluctuation happens frequently, as long as DC bus voltage remains higher than under-voltage trip level.Emergency stopShuts down the inverter by hardware, bypassingthe CPU, to achieve a reliable, emergency stop function.Intelligent input terminal and output terminal ON/OFF delay functionHelps simplify external circuits.Active frequency matching function Motor frequency match restart function operates effectively even without motor residual voltage.Controlled deceleration and stop on power lossAnalog Input Disconnection Detection FunctionThe SJ700 (SJ700B) outputs a disconnection signal when frequency command through analog input is lost.Acceleration/Deceleration curve functionsThe curve shape (five types, such as S-curve, etc.) can be chosen according to the application requirements.Analog Command Holding Function (AHD)Output frequency can be changed with UP/DOWN Function, or with an analog signal as reference value. The set frequency at power shutdown can be saved, too.Pulse train input functionPulse train input for Frequency reference or PIDfeed back signal, with SJ-FB (speed feed back card option).Integrated Input Electric Power monitorInput electric power (kW) and Integrated input electric power for monitoring energy saving.Automatic Carrier Frequency Adjustment FunctionThe SJ700 detects motor current and automatically reduces carrier frequency according to the current.The resolution of analog outputs(voltage, current) is improved to 10 bits.Hitachi original PWM control method limits motor terminal voltage to less than two times of inverter DC bus voltage.Lower than Hitachi motor Max. insulation voltage (1,250V)(During regeneration, the motor terminal voltage may exceed the motormaximum insulation voltage(1,250V))1,250V45*1: The protection method conforms to JIS C 0920(IEC60529)*2: The applicable motor refers to Hitachi standard 3-phase motor (4-pole).To use other motors, be sure to prevent the rated motor current (50Hz) from exceeding the rated output current of the inverter.*3: The output voltage decreases as the main power supply voltage decreases except for the use of AVR function.*4: Braking resistor is not integrated in the inverter. Please install optional braking resistor or dynamic braking unit when large braking torque is required.*5: Conforms to the test method specified in JIS C 60068-2-6 2010 IEC 60068-2-6 2007).*6: To operate the motor beyond 50/60Hz, please consult with the motor manufacturer about the maximum allowable rotation speed.*7: Storage temperature refers to the temperature in transportation.*8: The frequency command is the maximum frequency at 9.8V for input voltage 0 to 10VDC, or at19.8mA for input current 4 to 20mA.If this characteristic is not satisfactory for your application,contact your Hitachi representative.67*2: The applicable motor refers to Hitachi standard 3-phase motor (4-pole).To use other motors, be sure to prevent the rated motor current (50Hz) from exceeding the rated output current of the inverter. *3: The output voltage decreases as the main power supply voltage decreases except for the use of AVR function.*4: Braking resistor is not integrated in the inverter. Please install optional braking resistor or dynamic braking unit when large braking torque is required.*5: Conforms to the test method specified in JIS C 60068-2-6:2010 (IEC 60068-2-6:2007).*6: To operate the motor beyond 50/60Hz, please consult with the motor manufacturer about the maximum allowable rotation speed. *7: Storage temperature refers to the temperature in transportation.*8: The frequency command is the maximum frequency at 9.8V for input voltage 0 to 10VDC,or at 19.8mA for input current 4 to 20mA.If this characteristic is not satisfactory for your application,contact your Hitachi representative.*9: SJ700B series is -10 to 45℃.*10: Please be sure to connect DC reactor attached to 1850HF,2200HF,3150HF and 4000HF.(1850HF,2200HF and 3150HF of US/JP Version:The DC reactor is not attached.)*11: 1850HF,2200HF,3150HF and 4000HF:The function is not provided.SJ700-004 037 LFUF2, LFF2 SJ700-007 040HFEF2, HFUF2, 007 037HFF2 SJ700B-055HF SJ700-150 220 LFUF2,LFF2 /HFEF2, HFUF2,HFF2 SJ700B-185 300HFF/ UF/LFUFSJ700-370 450 LFUF2,LFF2 SJ700-370 550 HFEF2, HFUF2,HFF2 SJ700B-450 750HFF/ UF,450 550LFUFSJ700-300 LFUF2,LFF2 /HFEF2, HFUF2, HFF2 SJ700B-370HFF/ UF/LFUFSJ700-550 LFUF2,LFF2SJ700B-750LFUFSJ700-055 110 LFUF2,LFF2 /HFEF2, HFUF2,HFF2 SJ700B-075 150HFF/ UF/LFUF[Unit : mm(inch)]Inches for reference only.8* Please refer to page 30 for detailed information about compatibility with SJ300.[Unit : mm(inch)]Inches for reference only.SJ700-750, HFEF2, HFUF2, HFF2 SJ700B- , 1100HFF/HFUFSJ700-1100 HFF2 SJ700B-1320 HFUFDigital OperatorExhaustAir intake740(29.13)710(27.95)2- 12( 0.47)480(18.90)380(14.96)2-12(0.47)270(10.63)480(18.90)79(3.11)80(3.15)62.5(2.46)Digital OperatorExhaustAir intake390(15.35)300(11.81)2-12(0.47)700(27.56)670(26.38)2- 12( 0.47)270(10.63)357(14.06)79(3.11)80(3.15)32.5(12.8)9*2 1850H,2200H and 3150H of US/JP Version:The DC resctor is not attached.Digital OpratorSJ700-1850,2200HFE2/HFU2*2/HFF2*2SJ700-3150HFE2/HFU2*2/HFF2*2SJ700-4000HFE2/HFU2/HFF2Attachment DC reactor(DCL-H-400-H-R)[Unit : mm(inch)]Inches for reference only.ExhaustVent Holes B(*1)680(26.77)290(11.41)50(1.96)50(1.96)290(11.41)450(17.71)15(0.59)1300(51.18)1270(50.0)15(0.59)15(0.59)Digital Operator 2-M12 Eyebolts3- 15(0.59)2-M12 Screw Holes4-M12 Screw Holes For Eyebolts*1 Vent-Holes A are formed on both right and left side portions. Vent-Holes B are just on right side.Air IntakeExhaustAir Intake15(0.59)300(11.81)300(11.81)300(11.81)1050(41.33)75(2.95)75(2.95)2-M16 Eyebolts2-M16 Screw Holes 15(0.59)1700(66.92)1670(65.74)15(0.59)4-M16 Screw Holes For Eyebolts450(17.71)4- 15(0.59)Downward details drawingH200305W24511x1818X2550150230DCL-H-185-H-R DCL-H-220-H-R 35039530531556H ModelW X 32536552510050285335150460285Downward details drawing15x252- 1436536552510050285335180460285Downward details drawing15x252- 14Attachment DCreactor(DCL-H-185-H-R),(DCL-H-220-H-R)Attachment DCreactor(DCL-H-315-H-R)Vent Holes A(*1)995(39.17)965(37.99)15(0.59)15(0.59)370(14.56)695(27.36)Digital Operator2-M12 Eyebolts3- 15(0.59)4-M12 Screw Holes For EyeboltsExhaustAir Intake 15(0.59)290(11.41)57.5(22.63)57.5(2.26)290(11.41)10The contents of a basic mode display.(default)SJ700 and SJ700B Series can be easily operated with the digital operator provided as standard. The digital operator can also be detached and can be used for remote-control. Operator with copy function (WOP) and digital operator with potentiometer are also available as options.through parameters and functions shown on the display, and increment/decrement values.parameter value.the If a desired parameter is not displayed, check thesetting of function "b037" (function code displayrestriction). To display all parameters, specify "00" for "b037".111314with less than 2kHz by a low value. Please set to 2kHz or more and use the setting of “Carrier frequency setting” for such a situation. (*2) 1850HF, 2200HF and 3150HF:2.1, 4000HF:1.9 15respectively. (You cannot arbitrarily write "64" to "C001".) If the SW1 signal is turned off and then turned on, "no" (no assignment) is set in parameter "C003".16 (*2) 1850HF,2200HF,3150HF and 4000HF:The function is not provided.17(*2) 1850HF,2200HF,3150HF and 4000HF:0.001 to 9.999,10.00. to 65.53(mH).(*3) 1850HF,2200HF,3150HF and 4000HF:0.01 to 0.35 “ rated current ”(A).1819Status DisplayMain Circuit TerminalsScrew Diameter and Terminal Width2122Control Circuit TerminalsRelay Output PCB(L300PTM)23242526You can mount the keypadwith the potentiometer for aNEMA1 rated installation.The kit also provides forremoving the potentiometerknob to meet NEMA 4Xrequirements,as shown(part no.4X-KITmini).For Furthermore Operation ...... Use option as WOPMain Features for WOP :-Large LCD screen-Real time clock-Copy function: Storing parameter settings of a total 4 units of inverters-Multi-language (Japanese, English and Chinese) [ Planning to expand to 10 languages ] SJ700 and SJ700B is English only.-Selectable display contents4X-KITmini (For installation with OPE-SR mini)PanelScrewExternalGasketFront CoverInternalGasket 1InternalGasket 2Rear Cover CableCable <ICS-1,3>LOperator, CableOperator<OPE-SBK(SR)><OPE-SR mini><WOP>Operator<SRW-0J, SRW-0EX>2728Output frequency, acceleration time, deceleration time, torque limit, and orientation position *1 can be set by a digital output device such as PLC, etc. (Binary or BCD)Feedback Expansion Card SJ-FBDeviceNet™ EXPANSION CARD SJ-DN2Detecting motor speed with an encoder and receiving the feedback suppress speed fluctuation and realize high-precision operation. Positioning control and orientation with pulse-train input are also possible.High-precision operation for the main motor of coil winding machine, wire drawing machine, truck, extruder, etc.SJ-DN2 has DeviceNet™ functions, and it can perform network communication such as RUN/STOP,status monitoring, parameter setting, etc. by connecting with an upper level controller.Expensive hard-wiring can be eliminated for space saving and cost reduction, and installation/replacement within the system can be easily done. Application ExamplesData Bit ConfigurationStandard SpecificationsConnecting Diagram29DERATING DATA30Note2:370, 450L/H and 550H:Metal fittings differ. 31Note2:450, 550L/H and 750H:Metal fittings differ.32Application to Motors33Precaution for Correct Usage• Before use, be sure to read through the Instruction Manual to insure proper use of the inverter.• Note that the inverter requires electrical wiring; a trained specialist should carry out the wiring.• The inverter in this catalog is designed for general industrial applications. For special applications in fields such as aircraft, outer space,nuclear power, electrical power, transport vehicles, clinics, and underwater equipment, please consult with us in advance.•For application in a facility where human life is involved or serious losses may occur, make sure to provide safety devices to avoid a serious accident.•The inverter is intended for use with a three-phase AC motor. For use with a load other than this, please consult with us.Information in this brochure is subject to change without notice.34Printed in Japan(T) SM-E268Q 0113。
日本sigema公司 驱动器资料

压 电
陶
瓷
平
台
SG-55M/55MA
光
● SG-55M/55MA 是一个小型而廉价的单轴微分驱动器。与您的控制器一起使用,可以驱
栅
尺
动 SGSP 系列的电动平台。
平
● 为了提高驱动效率,SG-55M/55MA 采用了特殊驱动方式,在需要高速运行时,其内部
台
电路能从微步驱动自动切换到整步驱动。
励磁时序信号输出
集电极开路输出 DC 30V, 15mA 以下
输入信号
相当于 C-MOS 的负逻辑输入 [H]:4 ~ 5V [L:] 0 ~ 0.6V
电源
DC 24~ 36V ± 10% DC 5V ± 5%
电
工作温度范围
0 ~ 40 ℃
缆
插头座:CN1 171825-3(AMP)
附件
CN2 171825-5(AMP)
※3
插脚编号
广濑电子株式会社制造
白电线未使用
茶 蓝 黑
相反侧(-)极限位置
传感器
※2
SGSP40-5ZF 系列 (TS3682N5) SGSP60-ZF 系列 (PMM33BH2-C30) SGSP80-20ZF (PMM33BH-MG20)
进 电 机 平 台
型号:RP17-13RA-12SD
白电线未使用
KR-525M
精 度 检 验
用
户
控
制
控 制
器
与
驱
动
1
KR-525M
2
3
4
输入信号
5
6
7
8
9
10
1
2
电源 AC100〜115V
SYNTEC 新代伺服调试手册

新代伺服调试手册——驱控一体篇技术中心2016-01-12V1.3更新履历:项次更改内容更改日期作者更改后版本1 初稿2015-10-15 郭浩 1.02 增加Z轴刹车延时2015-11-15 郭浩 1.13 增加多台串联之设定2015-12-4 郭浩 1.24 排版2015-01-12 郭浩 1.3目录目录 (3)摘要 (4)一、安装与配线 (5)1. 驱动器界面说明 (5)2. 安装尺寸图 (8)3. 配线图 (8)二调机流程 (9)1. Z轴煞车功能设定 (9)1) 原理图与接线 (9)2) 参数设定 (10)2. 写入参数 (11)3. 编码器功能测试(可省略) (12)4. 负载惯量估测 (12)5. 速度回路带宽设定 (12)6. 试运转 (15)三、控制器参数设定 (17)四、常见QA (19)Q1:如何使用共振抑制功能 (19)Q2:为何我调机线总是连不上调机软件? (19)Q3:为何调机软件总是收不到编码器的讯号,一直跳AL-3XX? (20)Q4:为何永磁在做磁极偏移量校正时会出现高频异音与抖动? (20)Q5:永磁电机上高转速时会发高频异音? (21)Q6:控制器无法显示驱动器警报内容? (21)Q7:负载惯量估测报警AL-412(惯量调机电机未转动) (21)Q8:开机报AL-810(编码器电池电压过低位置遗失) (22)附录一、四合一驱动更新操作说明 (23)一、DSP更新步骤 (23)异常状况 (26)Q&A (29)二、FPGA更新步骤 (30)异常状况 (32)Q&A (33)摘要此文件,为新代驱控一体调试使用手册。
若非驱控一体方案,请参考其他的调试文件。
一、安装与配线1.驱动器界面说明区域模块说明A 外供电源连接220V三相交流电(RST)B电机电源供给连接马达侧提供马达电源(UVW)共四组,由右至左分别为第一至第四轴C MIII串行通讯阜连接上位控制器(MIII讯号)D Mini USB连接阜连接个人计算机E I/O讯号阜连接I/O设备(急停、警示灯…等)F 编码器回授由上至下分别为第一至第六阜。
日进伺服驱动器资料(手册)

日进伺服驱动器资料(手册)摘要:1.伺服驱动器的概念和分类2.伺服驱动器的工作原理3.伺服驱动器的主要性能指标4.伺服驱动器的应用领域5.日进伺服驱动器的特点和优势正文:一、伺服驱动器的概念和分类伺服驱动器,又称为伺服电机驱动器,是一种将电脉冲转化为角位移的电机控制器。
它通过对电机的电流、电压、转速等参数进行精确控制,实现对电机的精确定位和稳定运行。
根据驱动方式的不同,伺服驱动器可分为直流伺服驱动器、交流伺服驱动器和混合式伺服驱动器。
二、伺服驱动器的工作原理伺服驱动器的工作原理主要基于闭环控制系统。
首先,系统通过检测装置获取电机的实时位置和速度信息,然后将这些信息与设定值进行比较,计算出偏差。
接着,控制系统根据偏差生成相应的控制信号,通过驱动器将控制信号作用于电机,从而实现对电机的精确控制。
三、伺服驱动器的主要性能指标伺服驱动器的主要性能指标包括:1.控制精度:控制精度越高,说明伺服驱动器对电机的定位能力越强。
2.响应速度:响应速度越快,说明伺服驱动器对电机的控制能力越强。
3.额定输出功率:额定输出功率越大,说明伺服驱动器能驱动的电机功率越大。
4.额定转矩:额定转矩越大,说明伺服驱动器能驱动的电机负载能力越强。
四、伺服驱动器的应用领域伺服驱动器广泛应用于自动化生产线、机器人、数控机床、包装设备、印刷设备等领域,以实现对电机的精确控制和提高设备的运行效率。
五、日进伺服驱动器的特点和优势日进伺服驱动器作为一家专注于伺服驱动器研发和生产的企业,其产品具有以下特点和优势:1.高精度:日进伺服驱动器采用先进的控制算法,实现对电机的高精度控制。
2.高效率:日进伺服驱动器采用高效的电机控制技术,提高设备的运行效率。
3.稳定性:日进伺服驱动器采用闭环控制系统,保证设备的稳定运行。
4.良好的兼容性:日进伺服驱动器可兼容多种品牌和型号的电机,满足不同用户的需求。
nsk驱动器ega系列中文说明书
nsk驱动器ega系列中文说明书使用说明:1、在装配和调试之前,请详细阅读伺服驱动器产品说明书。
不正确地使用本产品可能会导致人身伤害或设备损坏。
务必严格遵守安装说明和要求。
2、各系统组件必须接地。
通过低阻抗的接地来保证电气安全(根据EN/IEC618005-1标准,保护等级1)。
电机应通过独立的接地导体连接至保护地,其接地导体的规格不可低于电机动力电缆的规格。
本产品内有对静电敏感的元件,不正确的放置会损坏这些元件,请避免本产品接触到高绝缘材料(如人造纤维、塑料薄膜等等),应将其置于导电表面。
操作人员通过触碰接地的无漆金属表面释放一切可能产生的静电。
3、操作期间,请勿打开外壳及电气柜柜门。
否则,潜在的危险可能导致人身伤害或设备损坏。
4、操作期间,本伺服驱动器内含充电元件和高温器件。
散热片温度可以达到90度。
即使电机没有旋转,控制电缆和电源电缆仍会带有高压。
5、为避免电弧对人员的危害及电气开关触点的损坏,请勿带电插拔。
6、设备断电后,在触碰或拆卸带电部件(如电容、开关触点、螺钉端子等等)前,请等待至少5分钟。
为安全起见,在触碰设备前,请用电表测量电气开关触点是否带电。
待电压降到低于30VAC后再操作。
7、请根据当地法规,配备主电源断路设备。
8、在进行测试和设置前,设备制造商必须为其设备进行危险分析,并采取适当措施,以确保不可预见的操作不会造成人员伤害或财产损失。
9、由于伺服驱动器符合IEC60529中的IP20标准,以及UL50中的1类标准,因此终端用户必须选用可使驱动器安全运行的电控箱。
电控箱必须至少达到IEC60529中的IP54标准,以及UL50中的2类标准,并且由金属或阻燃等级为5VA的材料制成,同时底部没有任何开口。
10、由于伺服驱动器接地漏电流大于3.5mA,为符合IEC61800-5-1和UL508C标准,可采用两条PE电缆接地,也可使用横截面积大于10mm²的铜线进行接地。
日进伺服驱动器资料(手册)

日进伺服驱动器资料(手册)
(最新版)
目录
1.日进伺服驱动器概述
2.日进伺服驱动器产品特点
3.日进伺服驱动器应用领域
4.日进伺服驱动器安装与维护
5.日进伺服驱动器技术参数
6.日进伺服驱动器使用手册
正文
日进伺服驱动器是一种高性能的驱动器,具有出色的速度控制和转矩控制能力,被广泛应用于各种工业自动化设备中。
一、日进伺服驱动器概述
日进伺服驱动器是由日本日进公司研发生产的一种高性能驱动器,采用了先进的矢量控制技术,能够实现对电机的精确控制。
二、日进伺服驱动器产品特点
日进伺服驱动器具有以下特点:
1.高精度:采用矢量控制技术,能够实现对电机的精确控制。
2.高效率:日进伺服驱动器采用了高效的电机控制算法,能够提高电机的运行效率。
3.抗干扰能力强:日进伺服驱动器具有强大的抗干扰能力,能够在各种复杂的工业环境中稳定工作。
三、日进伺服驱动器应用领域
日进伺服驱动器广泛应用于各种工业自动化设备中,如数控机床、机器人、自动化生产线等。
四、日进伺服驱动器安装与维护
日进伺服驱动器的安装与维护十分简便,具体的安装与维护方法可以参考产品手册。
五、日进伺服驱动器技术参数
日进伺服驱动器的主要技术参数包括额定电压、额定电流、额定功率等,具体的参数可以根据产品型号进行查询。
六、日进伺服驱动器使用手册
日进伺服驱动器的使用手册包含了产品的安装、调试、维护等方面的详细信息,使用者可以根据需要进行查阅。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
日进伺服驱动器资料(手册)
日立进口伺服驱动器资料(手册)有很多,以下是一些常见的手册:
1. 日立进口伺服驱动器 WJ200系列用户手册:该手册详细介绍了WJ200系列伺服驱动器的基本操作方法、安装说明、参数设置方法等。
2. 日立进口伺服驱动器 SJ700系列用户手册:该手册详细介绍了SJ700系列伺服驱动器的功能特点、应用注意事项、参数设置方法等。
3. 日立进口伺服驱动器 VFD-E系列用户手册:该手册详细介绍了VFD-E系列伺服驱动器的主要功能、安装方法、参数设置等。
4. 日立进口伺服驱动器 AC70系列用户手册:该手册详细介绍了AC70系列伺服驱动器的电气连接、参数设置、运行调试等。
以上只是一些常见的日立进口伺服驱动器资料(手册),实际上还有很多其他型号的手册可供参考。
如果您需要具体某个型号的手册,您可以通过日立官方网站或联系当地的日立授权经销商获取。