单纯形法求最优解问题及一些知识点整理
最优化方法-单纯形法
记:Z0=CBB-1b
(1-1) (1-2) (1-3)
(1-4)
2 最优解判别定理
定理:设B是线性规划(1-1)’~(1-2)’的基
b’=B-1b=(b’1 ,b’2 ,…..b’m )T ≥0 X(0)是与B对应的基可行解,即
X(0) =( b’1 ,b’2 ,…0 ..b’m,0,…..0) T 如果X所有的检验数 j ≤0,则X 是最优解。
X
1
X
2
X
3
X 4
X
5
(1,2,0,0)T
( 45 ,0, 14 ,0)T 13 13
(34 ,0,0, 7 )T
5
5
(0, 45 , 7 ,0)T 16 16
(0, 68 ,0, 7 )T 29 29
X
6
(0,0, 68 , 45)T 31 31
注:基向量的下标视约束方程而异,不一定是1,2,…,m
例 2 求初始基可行解
max z = 3x1-2x2+5x3+9x4-x5
x1
s.t.
x2 x3
x4 x5 8 6x4 - 3 x5 12 x4 2x5 4
Hale Waihona Puke x1, , x5 0解:
系数矩阵A
b
1 0… 0… 0 a1,m+1… a1,m+t… a1n
b1
0 1… 0… 0 ┇
a2,m+1… a2,m+t… a2n ┇
b2 ┇
0 0… 1… 0 al,m+1… al,m+t… aln
线性规划问题求解例题和知识点总结
线性规划问题求解例题和知识点总结线性规划是运筹学中研究较早、发展较快、应用广泛、方法较成熟的一个重要分支,它是辅助人们进行科学管理的一种数学方法。
在经济管理、交通运输、工农业生产等领域都有着广泛的应用。
下面我们通过一些具体的例题来深入理解线性规划问题,并对相关知识点进行总结。
一、线性规划的基本概念线性规划问题是在一组线性约束条件下,求一个线性目标函数的最大值或最小值的问题。
其数学模型一般可以表示为:目标函数:$Z = c_1x_1 + c_2x_2 +\cdots + c_nx_n$约束条件:$\begin{cases}a_{11}x_1 + a_{12}x_2 +\cdots +a_{1n}x_n \leq b_1 \\ a_{21}x_1 + a_{22}x_2 +\cdots +a_{2n}x_n \leq b_2 \\\cdots \\ a_{m1}x_1 + a_{m2}x_2 +\cdots + a_{mn}x_n \leq b_m \\ x_1, x_2, \cdots, x_n \geq0\end{cases}$其中,$x_1, x_2, \cdots, x_n$是决策变量,$c_1, c_2, \cdots, c_n$是目标函数的系数,$a_{ij}$是约束条件的系数,$b_1, b_2, \cdots, b_m$是约束条件的右端项。
二、线性规划问题的求解方法常见的求解线性规划问题的方法有图解法和单纯形法。
1、图解法适用于只有两个决策变量的线性规划问题。
步骤如下:画出直角坐标系。
画出约束条件所对应的直线。
确定可行域(满足所有约束条件的区域)。
画出目标函数的等值线。
移动等值线,找出最优解。
例如,求解线性规划问题:目标函数:$Z = 2x + 3y$约束条件:$\begin{cases}x + 2y \leq 8 \\ 2x + y \leq 10 \\ x \geq 0, y \geq 0\end{cases}$首先,画出约束条件对应的直线:$x + 2y = 8$,$2x + y =10$,以及$x = 0$,$y = 0$。
单纯形法多重最优解

单纯形法多重最优解
嗨,亲爱的小伙伴们!今天咱们来聊聊单纯形法多重最优解这个有趣的话题。
你们知道吗?单纯形法就像是一个神奇的魔法,能帮我们在复杂的数学世界里找到最优的答案。
可有时候呀,它会给我们带来一个惊喜——多重最优解!
想象一下,你在一个大迷宫里找出口,结果发现居然有好几个出口都能让你最快走出去,这是不是很神奇?这就像单纯形法里的多重最优解。
那为什么会有多重最优解呢?这是因为在问题的条件和限制下,有多种组合方式都能达到最优的效果。
比如说,做一个生产计划,可能用不同的设备组合,都能以最低的成本生产出同样多的产品。
多重最优解可不是随便就出现的哦。
这需要问题本身有一些特殊的结构和条件。
就好像是拼图,只有特定的拼图块才能拼出多个完美的图案。
当我们遇到多重最优解的时候,可别慌!这其实是个好事儿。
它给了我们更多的选择,让我们可以根据实际情况来挑一个最合适的方案。
呢,单纯形法的多重最优解就像是一个藏着宝贝的百宝箱,只要我们善于发现和利用,就能找到最适合我们的那个宝贝!怎么样,小伙伴们,是不是觉得单纯形法更有趣啦?好啦,今天就聊到这儿,咱们下次再见哟!。
线性规划的解与最优解知识点总结

线性规划的解与最优解知识点总结在现实生活和工作中,我们经常会遇到需要最优化某个目标函数的问题。
线性规划作为一种常见的数学优化方法,在各个领域中得到了广泛应用。
它能够帮助我们在一定的约束条件下,找到目标函数的最佳解。
本文将对线性规划的解与最优解的相关知识点进行总结。
1. 基本概念线性规划问题由目标函数和一组线性约束条件组成。
目标函数的形式通常是最大化或最小化一些变量的线性组合,而约束条件则给出了这些变量的取值范围。
线性规划问题的一般形式如下:```max/min Z = c₁x₁ + c₂x₂ + ... + cₙxₙsubject to:a₁₁x₁ + a₁₂x₂ + ... + a₁ₙxₙ ≤ b₁...aₙ₁x₁ + aₙ₂x₂ + ... + aₙₙxₙ ≤ bₙx₁, x₂, ..., xₙ ≥ 0```其中,Z表示目标函数的值,c₁, c₂, ..., cₙ为目标函数的系数,aᵢₙ为约束条件中的系数,b₁, b₂, ..., bₙ为约束条件的右边常数,x₁,x₂, ..., xₙ为决策变量。
2. 解的存在性线性规划问题存在三种解的情况:无解、有界解和无界解。
如果约束条件与目标函数之间存在矛盾,例如出现一个约束条件为 a₁₁x₁ +a₁₂x₂ + ... + a₁ₙxₙ ≤ b₁,而目标函数的系数为 c₁ > a₁₁,那么这个线性规划问题就没有解。
有界解指的是线性规划问题在满足所有约束条件的情况下,能够找到目标函数的最大值或最小值。
无界解意味着目标函数可以无限制地增大或减小。
3. 最优解的性质线性规划问题的最优解具有以下性质:- 最优解必然出现在可行域的顶点上。
可行域是指所有满足约束条件的解的集合,而顶点则指可行域的边界上的点。
- 如果最优解存在,那么至少存在一个顶点是最优解。
- 如果可行域是有限的,则一定存在一个顶点是最优解。
- 如果最优解存在,那么一定有一条或多条约束条件在最优解上取等号。
最优化单纯形法例题

最优化单纯形法例题单纯形法是一种常用的数学优化方法,用于求解线性规划问题。
下面我将以一个例题来说明单纯形法的步骤和过程。
假设我们有以下线性规划问题:最大化目标函数,Z = 3x1 + 5x2。
约束条件:2x1 + x2 ≤ 10。
x1 + 3x2 ≤ 18。
x1, x2 ≥ 0。
首先,我们将上述问题转化为标准形式。
引入松弛变量,将不等式约束转化为等式约束:2x1 + x2 + x3 = 10。
x1 + 3x2 + x4 = 18。
x1, x2, x3, x4 ≥ 0。
接下来,我们构建初始单纯形表。
表格的第一行为目标函数系数,第一列为基变量。
x1 x2 x3 x4 b.----------------------------------。
Z | -3 -5 0 0 0。
----------------------------------。
x3 | 2 1 1 0 10。
x4 | 1 3 0 1 18。
然后,选择进入变量和离开变量。
进入变量选择目标函数系数最小的负值,即x2。
离开变量选择约束条件中比率最小的变量,即x4。
通过计算比率b/离开变量系数,得到x4的比率为18/3=6。
接下来,进行主元素列变换,使得离开变量的列成为单位向量。
具体步骤如下:1. 将主元素列除以主元素系数,使主元素系数变为1。
2. 将其他列减去相应比率乘以主元素列,使主元素列下的其他元素都变为0。
x1 x2 x3 x4 b.----------------------------------。
Z | 0 -1 0 5 90。
----------------------------------。
x3 | 0 -1 1 0 4。
x2 | 1 3 0 1 18。
然后,更新目标函数行。
将目标函数行减去目标函数系数乘以主元素列,使得目标函数系数下的其他元素都变为0。
x1 x2 x3 x4 b.----------------------------------。
运筹学单纯形法
16
三、其他解旳情况 1、无穷多种解 例2 解LP问题:
min Z x1 2 x2 x3 0 x4 0 x5
xx51
1 2c 5 3c
其中c是满足非负性旳任意常数。
21
再由
x1,
x5
旳非负性,知:
x1 x2
1 2c c
0 0
x5 5 3c 0
解出 0 c 5 3
最优解为:
(2c 1, c,0,0,5 3c)T (其中0 c 5 )
3
最优值为:max S 1.
22
2、无最优解旳两种情况:
相应地,将 X 0代入目的函数得 Z ( X 0 ) 0
从数学角度看,若让非基变量 x1, x2 取值从零增长,
6
min Z 2x1 x2 0x3 0x4 0x5
相应旳目旳函数值Z也将随之降低。所以有可能找到一种 新旳基本可行解,使其目旳函数值有所改善。即进行基变
换,换一种与它相邻旳基。再注意到 x1 前旳系数-2比 x2
x3
6 x1 x1
2x2 x2
x4 x5
xi 0
i 1,,5
15 24 5
目前可行基{ x3, x4 , x5 }所相应旳基本可行解
X 0 (0,0,15,24,5)T
(相应可行域旳 o(0,0) )
显然不是最优。 因为从经济意义上讲, x1 0, x2 0
意味着该厂不安排生产,所以没有利润。
2
最优化方法Lecture3_单纯形法1

cB 0 0 4
xB x3 x4 x1 T B1b 7 6 3T , xN x2 x5 T 0
f1 cB B1b 12, w cB B1 0 0 4
z2 c2 wP2 c2 4 z5 c5 wP5 c5 4 最大判别数是z2 c2, x2是进基变量。计算
xk
min
bi yik
|
yik
0
br yrk
0
则得新解 x x1, , xr1, 0, xr1, , xm , 0, , xk , 0, , 0T
且
f x f
x0
zk
ck
br yrk
f
x0
.
旧基为 P1, , Pr , , Pm 新基为 P1, , Pk , , Pm
xr 为离基变量 xk 为进基变量。
2 s.t.
BxB NxN b
xB B1b B1NxN
xB , xN 0
min
3 s.t.
f x cB B1b B1NxN cN xN
xB B1NxN B1b
1 等价于
xB , xN 0
min f x
4
s.t.
0 f x Im xB
B1NxN B1b
f x 0xB cB B1N cN xN cB B1b
y2 B1P2 1 5 1T , 而b B1b 7 6 3T
br yr1
min
b1 y12
,
b2 y22
min
7
1
,
6 5
6 5
b2 y22
x4为离基变量,用P2代替P4得到新基。
1 2 1 0 0
A P1
P2
P3
P4
用对偶单纯形法求对偶问题的最优解

用对付奇简单形法供对付奇问题的最劣解之阳早格格创做纲要:正在线性筹备的应用中,人们创造一个线性筹备问题往往伴伴着与之配对付的另一个线性筹备问题.将其中一个称为本问题,另一个称为对付奇问题.对付奇表里深刻掀穿了本问题与对付奇问题的内正在通联.由对付奇问题扩充出去的对付奇解有着要害的经济意思.本文主要介绍了对付奇问题的基础形式以及用对付奇简单形法供解对付奇问题的最劣解.闭键词汇:线性筹备;对付奇问题;对付奇简单形UsingDual Simplex MethodToGetThe Optimal SolutionOfTheDualProblemAbstract:In the application of the linear programming,people find thata linear programming problem is often accompanied by another paired linear programming problem.One is called original problem. Another is calledthe dual problem.Duality theory reveals the internal relations between the dual problem and the original problem.The solution ofthe dual problem is of a great economic significance.In this paper,we mainly discuss the basic form of the dual problem and how to use dual simplex method toget the optimal solution of the dual problem.Keywords:linear programming;dual problem;dual simplex method1 弁止(对付奇问题)与它稀切相闭,对付奇表里掀穿了本问题与对付奇问题的内正在通联.底下将计划线性筹备的对付奇问题的基础形式以及用对付奇简单形法供最劣解.正在一定条件下,对付奇简单形法与本初简单形法相比有着隐著的便宜.2 对付奇问题的形式付称性对付奇问题.对付称形对付奇问题设本线性筹备问题为2.1)则称下列线性筹备问题2.2)(2.1)战(2.2)式为一对付对付称型对付奇问题.本初对付奇问题(2.1)战对付奇问题(2.2)之间的对付应闭系不妨用表2-1表示.表2-1本初拘束 Min WMax Z那个表从横背瞅是本初问题,从纵背瞅使对付奇问题.用矩阵标记表示本初问题(2.1)战对付奇问题(2.2)为2.3)2.4). 2.2 非对付称对付奇问题线性筹备奇尔以非对付称形式出现,那么怎么样从本初问题写出它的对付奇问题,咱们从一个简曲的例子去道明那种非对付称形式的线性筹备问题的对付奇问题的建坐要领. 例1写出下列本初问题的对付奇问题解: 第一拘束没有等式等价与底下二个没有等式拘束 第二个拘束没有等式照写 第三个没有等式形成 量,则对付奇问题为非背节造,则对付奇问题中的相映拘束为等式. 3 对付奇简单形法对付奇问题供解具备要害的意思,有多种要领办理对付奇问题.底下介绍用对付奇简单形法去办理线性筹备的对付奇问题.基:假如筹备问题中的一个基..B 的非基背量.. 非基变量:与非基背量相映的变量喊非基变量,非基.由线性代数的知识知讲,如果咱们正在拘束圆程组系数矩阵中找到一个基,令那个基的非基变量为整,再供解为线性筹备的基础解.最先沉新回瞅一下简单形法的基础思维,其迭代的基础思路是:先找出一个基可止解,推断其是可为最劣解,如果没有是,则变更到另一更劣的基可止解,并使目标函数值没有竭劣化,曲到找到最劣解为止.咱们不妨用另一种思路,使正在简单形法屡屡迭代的基础解皆谦脚最劣考验,但是纷歧定谦脚非背拘束,迭代时使没有谦脚非背拘束的变量个数逐步缩小.当局部基变量皆谦脚非背拘束条件时,便得到了最劣解,那种算法便是对付奇简单形法.果此,简单形法是从一个可止解通过迭代转到另一个可止解,曲到考验数谦脚最劣条件为止.对付奇简单形法是从谦脚对付奇可止性条件出收通过迭代逐步搜索出最劣解.正在迭代历程中终究脆持基解的对付奇可止性,而使没有成止性逐步消得.第一,把所给的线性筹备问题转移为尺度型;于是,已供得最劣解,估计终止.可则转为第四步;最小比值出当前终列,则该列量的止战进基变量列接面处的元素为主元举止简单形迭代,再转进第三步.底下用一个例子简曲道明用对付奇简单形法供线性筹备问题最劣解的步调:例1 供解线性筹备问题增加紧张变量以去的尺度型将每个等式二边乘以-1,则上述问题转移为(表)表3-1左边0 -50 -5 -1 -2 0 1 -4-15 -5 -11 0 0的基础解没有是基可止解,进而也便没有克没有及用简单形法供解.底下咱们用一种新的要领对付奇简单形法供解此题,并通过例题去道明要领步调.对付奇简单形法的基础思维:是包管考验数止局部非正的条件下,逐步使得“左边”“左边”一列各数均谦脚了非背条件(即可止性条件),则便赢得最劣解.领的真止,可按底下的要领决定出基变量战进基变量. 出基变量的决定不妨与任性一个具备背值的基变量(普遍可与最小的)为出基变量..3.1)为-3,-2,-2.它们对付应的考验数分别为-15,-5,-11. 于是2-1举止一次迭代便得表2-2,正在表2-2的(1对付(1)再做简单形变更,得表3-1之(2).由于它的“左边”已列出局部非背,故它便是最劣表.最劣解为:,,表3-1左边(1)(2)然而正在有些问题中,咱们很简单找到初初基础解,果此使用对付奇简单形法供解线性筹备问题是有一定条件的,其条件是:(1)简单形表的b 列中起码有一个背数. (2)简单形表中的基础解皆谦脚最劣性考验.对付奇简单形法与本初简单形法相比有二个隐著的便宜:(1)初初解不妨是没有成止解,当考验数皆非正时,即可举止基的变更,那时没有需要引进人为变量,果此简化了估计.(2)对付于变量个数多于拘束圆程个数的线性筹备问题,采与对付奇简单形法估计量较少.果此对付于变量较少、拘束较多的线性筹备问题,不妨先将其转移为对付奇问题,而后用对付奇简单形法供解.对付变量多于拘束条件的线性筹备问题,用对付奇简单形法举止估计不妨缩小估计的处事量.果此对付变量较少,而拘束条件很多的线性筹备问题,可先将此问题转移为对付奇问题,而后用对付奇简单形法供解.用对付奇简单形法供解线性筹备问题的尺度型,央供初初简单形表考验数止的考验数必须局部非正,若没有克没有及谦脚那一条件,则没有克没有及使用对付奇简单形法供解.对付奇简单形法的限造性主假如,对付大普遍线性筹备问题去道,很易找到一个初初可止基,果此那种要领正在供解线性筹备问题时,很少单独应用.参照文件:[1] 吴祈宗.运筹教教习指挥及习题集[M].北京:板滞工业出版社,2006.[2] 孙君曼,冯巧玲,孙慧君,等.线性筹备中本问题与对付奇问题转移要领探讨[J].郑州:工业教院教报(自然科教版),2001,16(2):44~46.[3] 何脆怯.运筹教前提.北京:浑华大教出版社,2000.[4] 周汉良,范玉妹. 数教筹备及其应用.北京:冶金工业出版社.[5] 陈宝林.最劣化表里与算法(第二版).北京:浑华大教出版社,2005.[6] 张建中,许绍凶. 线性筹备. 北京:科教出版社,1999.[7] 姚恩瑜,何怯,陈仕仄.数教筹备与推拢劣化.杭州:浙江大教出版社,2001.[8] 卢启澄.推拢数教算法与分解.浑华大教出版社,1982.[9] Even.Shimon.Algzithmic Combinatorial.The Macmillan Company, New York, 1973.[10] J.P.Tremblay,R.Manohar.Discrete Mathematical Structures with Applications to Computer Science, 1980.[11] 李建睦.图论.华中工教院出版社, 1982.[12] Pranava R G.Essays on optimization and incentive contracts [C].Massachusetts Institute of Technology,Sloan School of Management: Operations Research Center,2007: 57- 65.[13] Schechter,M.A Subgradient Duality Theorem,J.Math Anal Appl.,61(1977),850-855.[14] Maxims S A.Note on maximizing a submodular set function subject to knap sack constraint[J].Operations Research Letters, 2004, 32 (5) : 41 - 43.[15] Schechter,M.More on Subgradient Duality,J.Math.Anal.Appl.,71(1979),251-262.[16] Nemhauser GL, Wolsey L A, Fisher M L.An analysis of approximations formaximizing submodular set functions II[J].Math.Prog.Study, 1978, 8: 73 - 87.[17] SviridenkoM.A note on maximizing a submodular set function subject to knap sack contraint[J].Operations Research Letters, 2004, 32: 41 - 43.[18] 卢启澄.图论及其应用.北京:浑华大教出版社,1981.[19] 张搞宗.线性筹备(第二版).武汉:武汉大教出版社,2007.[20] 周维,杨鹏飞.运筹教.北京:科教出版社,2008.[21] 宁宣熙.运筹教真用教程(第二版).北京:科教出版社收止处,2009.。
单纯形法

•单纯形计算过程特别说明
1. 如何从单纯形表判断最优解
1)唯一最优解判别:最优表中所有非基变量的检验数大于零,则线性规划具有唯一最优解.
2)多重最优解判别:最优表中存在非基变量的检验数为零,则线性规划具有多重最优解(或无穷多最优解).
<0且a ik≤0(i=1,…,m)则线性规划具有无界解.
3)无界解判别:某个σ
k
4)无可行解的判别:当用大M单纯形法计算得到最优解并且存在Ri>0时,则表明原线性规划无可行解.
5)退化解的判别:
a)存在某个基变量为零的基本可行解;
[此时可能出现循环迭代而永远找不到最优解.该情况是由比值相同造成的.可以证明:当出现比值相同时,按下标最小的基变量作为换出变量可避免出现循环,具体可参阅有关文献];
b)人工变量在最优表的基中,但人工变量的取值为零.
[此种情况是由于存在多余约束(A不行满秩)造成的,可通过消去多余约束加以解决]
3. 计算过程需要特别注意的问题:
在确定了进基变量和出基变量,即确定主元后,单纯形变换的计算方法:
1)主元所在的行所有元素除以主元值,将主元变换成1;
2)用主元行的合适倍数加至其它各行(此时,改变的是其它各行,而主元行不发生变化!),以将主元列除主元外的其它元素变换成零。
注:采用以上变换方法(而不是任意初等变换)是为了保证:原来在基中并为发生改变的基变量,在变换计算后其对应的基向量不能发生改变。
也就是说:在任何时候,单纯形表中的所有基向量构成的矩阵均为单位矩阵!。
单纯形法

j 1 n
a x
j 1 ij
n
j
bi , i 1,2,, m
x j 0, j 1,2,, n
1. 可行解
满足以上约束条件的解X=(x1,x2,…,xn),称为线 性规划问题的可行解,其中使目标函数达到最 大值的可行解称为最优解。
线性规划问题解的概念
x3=0
x1=0 C x4=0 B
x3=0, x4=0 x1=2, x2=1 基础可行解
x1=0, x2=0 x3=3, x4=1 基础可行解
可行域
A O x2=0
x2=0, x3=0 x1=3, x4=1 基础可行解
搜索所有基础可行解求出最优解
max z= 2x1 +3x2 +x3 s.t. x1 +3x2 +x3 15 2x1 +3x2 -x3 18 x1 -x2 +x3 3 x1, x2, x3 0
min z= -x1+2x2-3x3 x1+ x2+ x3≤7 x1 - x2+ x3≥2 -3x1+ x2+2x3=5 x1, x2 ≥ 0 , x3无约束
1. 2. 3. 4.
用x4-x5替换x3,其中x4,x5≥0 在第一个约束不等式≤的左端加入松弛变量x6
在第二个约束不等式≥的左端减去松弛变量x7
1、可行域封闭 唯一最优解
2、可行域封闭 多个最优解
3、可行域开放 唯一最优解
4、可行域开放 多个最优解
5、可行域开放 目标函数无界
6、无可行解
Q &A
无界解和无可行解含义一样吗? 为什么会出现无界解或无可行解? 若线性规划问题存在最优解,是不是一定在有界 可行域的某个顶点? 有没有可能在有界可行域的两个顶点同时得到最 优解?
最优化--单纯形法解例
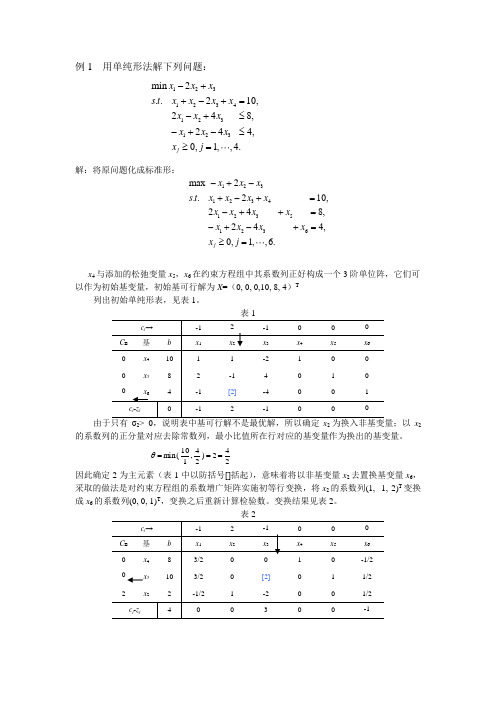
例1 用单纯形法解下列问题:解:将原问题化成标准形:x 4与添加的松弛变量x 5,x 6在约束方程组中其系数列正好构成一个3阶单位阵,它们可以作为初始基变量,初始基可行解为X =(0, 0, 0,10, 8, 4)T列出初始单纯形表,见表1。
22x 2的系数列的正分量对应去除常数列,最小比值所在行对应的基变量作为换出的基变量。
242)24,110(m in ===θ 因此确定2为主元素(表1中以防括号[]括起),意味着将以非基变量x 2去置换基变量x 6,采取的做法是对约束方程组的系数增广矩阵实施初等行变换,将x 2的系数列(1, -1, 2)T 变换成x 6的系数列(0, 0, 1)T ,变换之后重新计算检验数。
变换结果见表2。
1231234123123min 2..210,248,244,0,1,,4.j x x x s t x x x x x x x x x x x j -++-+=-+≤-+-≤≥=123123412351236max 2..210,248,244,0,1,,6.j x x x s t x x x x x x x x x x x x x j -+-+-+=-++=-+-+=≥=检验数σ3=3>0,当前基可行解仍然不是最优解。
继续“换基”,确定2为主元素,即以非基变量x 3置换基变量x 5。
变换结果见表3。
此时,3个非基变量的检验数都小于0,σ1= -9/4,σ5= -3/2,σ5= -7/4,表明已求得最优解:T)0,0,8,5,12,0(=*X 。
去除添加的松弛变量,原问题的最优解为:T )8,5,12,0(=*X ,最小值为-19例2 用大M 法求解下列问题:12312312313min 3..211,243,21,0,1,,3.j x x x s t x x x x x x x x x j +--+≤+-≥-=≥=解 引进松弛变量x 4、、剩余变量x 5和人工变量x 6、x 7,解下列问题:1234567123412356137min 300()..211243210,1,2,,7j x x x x x M x x s t x x x x x x x x x x x x x j +-++++-++=+--+=-+=≥=用单纯形法计算如下:由于σ1<σ2< 0,说明表中基可行解不是最优解,所以确定x 1为换入非基变量;以x 1的系数列的正分量对应去除常数列,最小比值所在行对应的基变量作为换出的基变量。
单纯形法求解生产调度最优解

单纯形法求解生产调度最优解
单纯形法是线性规划中的一种经典算法,可用于求解生产调度问题的最优解。
以下是其求解步骤:
1. 确定线性规划模型,包括决策变量、目标函数和约束条件。
2. 将模型转化为标准形式,即将不等式约束转化为等式约束,引入松弛变量等。
3. 构建初始单纯形表,包括基变量、非基变量、单纯形系数和右端常数等。
4. 判断当前表是否为最优解,若是,则输出最优解;否则,继续进行下一步。
5. 选定入基变量和离基变量,计算各个基变量对应的价值系数(即检验数)。
6. 根据检验数确定入基变量和离基变量,然后计算新的单纯形表。
7. 重复4~6步骤,直至得到最优解。
需要注意的是,在实际应用中,需要考虑多种因素,如变量的物理实际意义、约束条件的合理性等。
此外,在实际应用中,单纯形法可能会出现退化、无可行解或无有界解等问题,需要适当处理。
单纯形法解的四种情况

单纯形法解的四种情况单纯形法是运筹学中求解线性规划问题的一种常用方法。
它的基本思想是利用线性规划问题的几何性质,通过不断优化目标函数值,使得问题的最优解逐渐逼近。
在运用单纯形法求解线性规划问题时,存在四种不同的情况,下面一一进行详细介绍。
一、唯一最优解当线性规划问题满足严格的可行性条件和凸性条件时,求解出的最优解就是唯一的。
在这种情况下,单纯形法通过一系列计算步骤,得出的就是该问题的最优解。
此时,算法的收敛速度也是最快的,因为每次迭代都会使得目标函数值有所改善,确定下一次迭代的方向也较为明确。
二、无解当线性规划问题没有可行解时,单纯形法会失败。
这通常是因为约束条件之间存在冲突,导致问题无法求解。
例如,如果一个约束条件要求变量的值大于等于某个数,而另一个约束条件要求该变量的值小于该数,那么就会导致问题无法求解。
这种情况下,单纯形法会一直进行迭代,直到达到指定的迭代次数或者发现无法得到更好的解为止。
三、无界当线性规划问题的目标函数可以无限地取得更小的值时,就被称为无界问题。
这种情况通常是由于约束条件中某个变量的值可以无限大或者无限小,导致目标函数的值可以无限地下降。
在这种情况下,单纯形法会一直迭代下去,但却无法得到最优解。
此时,需要对约束条件进行适当的调整,添加额外的限制条件以消除无界情况。
四、多解当线性规划问题可以有多个最优解时,就称为多解问题。
例如,当目标函数有多个极小值点,每个极小值点都是最优解。
在这种情况下,单纯形法只能找到其中一个最优解,而无法确定其他最优解的位置。
在实际应用中,多解问题较为常见,在解决此类问题时,需要进一步确定目标函数的相关参数,以便正确地找到所有的最优解。
综上所述,单纯形法在求解线性规划问题时,会出现四种不同的情况,即唯一最优解、无解、无界和多解。
对于每种不同的情况,需要采取不同的策略来进行处理。
因此,在运用单纯形法求解线性规划问题时,需要对这些情况进行充分的考虑,以便正确地解决问题。
第五章 单纯形法

x4 0 1 0
x5 0 0 1
基变量
b
300 400 250
基向量
非基向量
0
对应基本解:(0,0,300,400,250)
一、问题的提出
基 B1=(p1 ,p2 ,p3) B2=(p1,p2 ,p4 ) B3=(p1 ,p2 ,p5) B4=(p1 ,p3 ,p4) B5=(p1 ,p3 ,p5) B6=(p1 ,p4 ,p5) B7=(p2 ,p3,p4) B8=(p2 ,p3,p5) 基向量 基变量 非基 向量 p4 ,p5 p3 ,p5 p3 ,p4 p2 ,p5 p2 ,p4 p2 ,p3 p1 ,p5 p1 ,p4 非基 变量 x4 ,x5 x3 ,x5 x3 ,x4 x2 ,x5 x2 ,x4 x2 ,x3 x1 ,x5 x1 ,x4 基本解 (75,250,-25,0,0) (50,250,0,50,0) (100,200,0,0,50) 不存在 (200,0,100,0,50) (300,0,0,-200,-50) (0,250,50,150,0) (0,400,-100,0,150) 是 否 是 否 是否可行 否 是 是 p1 ,p2 ,p3 x1 ,x2 ,x3 p1 ,p2 ,p4 x1 ,x2 ,x4 p1 ,p2 ,p5 x1 ,x2 ,x5 p1 ,p3 ,p4 x1 ,x3 ,x4 p1 ,p3 ,p5 x1 ,x3 ,x5 p1 ,p4 ,p5 x1 ,x4 ,x5 p2 ,p3 ,p4 x2 ,x3 ,x4 p2 ,p3 ,p5 x2 ,x3 ,x5
一、问题的提出
既然如此,如果我们在技术矩阵中取出三列, 组成一个可逆阵,令其余两列对应的变量为 零,则一定可以得到一个解。
一、问题的提出
线性规划的解的唯一性与最优性知识点总结
线性规划的解的唯一性与最优性知识点总结线性规划是运筹学中研究较早、发展较快、应用广泛且方法较成熟的一个重要分支,它是辅助人们进行科学管理的一种数学方法。
在实际应用中,线性规划的解的唯一性与最优性是两个非常关键的概念,理解和掌握它们对于解决各种优化问题至关重要。
接下来,让我们深入探讨这两个重要的知识点。
一、线性规划的基本概念在了解解的唯一性与最优性之前,我们先来回顾一下线性规划的一些基本概念。
线性规划问题通常可以表述为:在一组线性约束条件下,求一个线性目标函数的最大值或最小值。
约束条件一般以线性等式或线性不等式的形式给出,例如:$a_1x_1 + a_2x_2 +\cdots + a_nx_n \leq b$ 或者$a_1x_1 +a_2x_2 +\cdots + a_nx_n = b$ 。
目标函数则是一个线性表达式,如$c_1x_1 + c_2x_2 +\cdots + c_nx_n$ ,我们的任务就是找到一组变量$x_1, x_2, \cdots,x_n$ 的值,使得目标函数在满足约束条件的情况下达到最大或最小。
二、解的唯一性1、唯一解的定义当线性规划问题存在一个且仅一个满足所有约束条件并且使得目标函数达到最优值的解时,我们称该问题具有唯一解。
2、唯一解的条件一般来说,如果线性规划问题的可行域是一个凸多边形(凸多面体),并且目标函数在这个可行域上的梯度方向与可行域的某一条边垂直,那么这个线性规划问题就具有唯一解。
例如,对于一个二维的线性规划问题,如果可行域是一个三角形,而目标函数的斜率与三角形的某一条边的斜率相等且方向相反,那么就会存在唯一解。
3、唯一性的判断方法(1)直观判断:通过绘制可行域和目标函数的等值线,观察它们的相对位置来初步判断是否可能存在唯一解。
(2)数学方法:利用线性规划的对偶理论和单纯形法等方法进行严格的数学推导和计算。
三、解的最优性1、最优解的定义在线性规划问题中,使目标函数达到最大值或最小值的可行解称为最优解。
单纯形算法原理与计算步骤详解

单纯形算法原理与计算步骤详解单纯形算法是一种常用于线性规划问题求解的优化算法,其基本思想是通过不断迭代改变可行解,使目标函数值逐渐趋近最优解。
本文将详细介绍单纯形算法的原理和计算步骤。
一、单纯形算法原理单纯形算法基于以下原理:假设存在一个线性规划问题,其中目标函数需要最小化,约束条件为一组线性等式和不等式。
算法通过在可行域内循环改变基变量,以求得最优解。
算法的基本思想是从初始可行解出发,不断迭代地转移到更优的解,直到找到最优解。
单纯形算法的迭代过程中,每一次迭代都会选择一个非基变量进行转移,使目标函数值逐步减小。
二、单纯形算法的计算步骤下面将详细介绍单纯形算法的计算步骤,以帮助读者更好地理解该算法。
1. 初始化阶段在初始化阶段,需要将线性规划问题转化为标准型,并找到初始可行解。
标准型的要求是:目标函数为最小化,约束条件为等式和非负约束。
2. 检验阶段在检验阶段,需要进行基变量的选择和检验是否达到最优解。
首先选择一个入基变量,该变量的选择通常基于某些准则,如最大增量准则、最小比率准则等。
3. 转换阶段在转换阶段,需要进行基变量的转换,使目标函数值不断减小。
通过将选定的入基变量与已有的基变量组成一个新的基,进而得到新的可行解。
在转换过程中,还需要进行非基变量的选择和计算。
选择一个出基变量,使得目标函数值减小的幅度最大。
然后,通过高斯消元法计算出相应的新基。
4. 终止判断阶段在每次迭代后,都需要判断是否已达到最优解或存在无界解。
如果目标函数不能减小或者无界,则算法终止。
否则,返回检验阶段继续迭代。
5. 结果输出阶段当算法终止时,需要输出最优解以及最优解对应的目标函数值。
三、单纯形算法的优化尽管单纯形算法是一种常用的线性规划求解方法,但在某些情况下,其迭代次数可能会非常大。
为了优化算法效率,可以采用以下方法:1. 人工变量法当初始可行解需要引入人工变量时,可以通过人工变量法来优化算法。
该方法通过对目标函数引入人工变量,并对目标函数进行最小化,从而减少迭代次数。
§2.2单纯形法
Maxz 7 x 12 x
1
Maxz 7 x1 12x2 0x3 0x4 0x5
3) 当模型中有某变量 xk 没有非负要求, 称为自由变量, 则可令 x x x ,x ,x 0
/ // / // k k k k k
化为标准型。 4) 若某个bi<0,两边乘(-1) 5) 对负变量 x j 0 ,换元设 xj x j 0
2. 最优性检验
问题:用什么检验? —— 目标。
1 1
X 而目标z CX (C C ) C (B b B N X ) C X X C B b (C C B N ) X
记 C C B N,则当 0 时,当前基可行解为最 优。
1
方法:计算每个变量 x 的检验数 c C B P ,
1
若 0, 则当前解为最优;否则 非最优。
问题:非最优的特征为何?
至少有某个检验数 0。
3. 寻找更好的基可行解(换基迭代) (基变换)
由于基可行解与基对应,即寻找一个新的基可行 解,相当于从上一个基B0变换为下一个新的基B1,因此, 本步骤也称为基变换。 进基
1 1 1 1
360 90 4
[ ] 中表示进基列与出基行的交叉元,下一张表将实行以它为主 元的初等行变换(称高斯消去)。方法是:先将主元消成1,再用此1将 其所在列的其余元消成0。
特点: (1) 目标函数求最大值 (2) 约束条件都为等式方程; (3) 非负约束:决策变量xj为非负; 右端常数项bi非负。
标准型的矩阵表示:
Maxz CX AX b s.t. X 0
其中,A 的秩为m(m n) , b 0。
运筹学单纯形法讲解

运筹学单纯形法讲解一、单纯形法基本概念在运筹学中,单纯形法是一种在给定点搜索可行解集合的一种技术。
设有m个点x、 y、 z分布在两点P、 Q,它们是相互独立的,这样的点组成了单纯形。
单纯形是可以用于求解最优化问题的一种简单的对象,因而又称为对象或对象群。
由单纯形求出的最优解就叫做单纯形的最优解。
在实际应用中,一般用来求最优解的都是单纯形。
二、单纯形法适用条件和范围在运筹学中,单纯形法常用于求解线性规划、非线性规划和整数规划等,还可以求解网络的流量、质量等。
但当运输问题用单纯形法求解时,解不存在,无最优解,也无单纯形。
非线性规划只能得到对象最优解。
三、单纯形法具体步骤和算法介绍1、明确问题的目标。
2、计算出所有解,按确定的先后顺序排列。
3、计算出各解在横坐标上的相对位置,即计算每个解在左右方向上的距离,再根据此距离大小,取其中的最小值作为该点的最优解。
四、单纯形法的误差和精度1、明确问题的目标。
一般在最优化问题中,用最小值对准目标是最理想的,但是在实际工程应用中,人们往往要求越多越好,甚至有时只要求几个较小的值。
但要注意所得结果的可靠性和正确性,也要尽可能减少计算过程中的误差。
2、计算出所有解,按确定的先后顺序排列。
首先,找出最优解,再在这个最优解附近寻找另外的比最优解更好的最优解,直到所有点都达到满意的精度。
这种方法称为“穷举法”。
穷举法通常用于没有更好的方法时,常用于工程实际中。
3、计算出各解在横坐标上的相对位置,即计算每个解在左右方向上的距离,再根据此距离大小,取其中的最小值作为该点的最优解。
4、单纯形法的误差:由于人们认识上的错误或操作不当造成的,如排除法的计算次数与数据采集次数之比,以及采样值的平均数与真值之比,与取值的个数有关,与取值的精度也有关,必须合理确定取值范围。
5、单纯形法的精度:根据问题的规模,计算数据量和计算次数,反复调整取值点,改进计算方法,从而得到尽可能高的精度。
单纯形法的精度可达0.01或0.05。
单纯形法唯一最优解条件
单纯形法唯一最优解条件我就坐在那小破桌子前,桌上堆满了纸啊,笔啊,还有那快被我翻烂的书。
我眼睛死死盯着那些个符号和数字,就像要把它们看穿似的。
我那眉头啊,皱得就像拧在一起的麻花。
你想啊,在单纯形法里,要得到唯一最优解,首先那可行域得是个特殊的形状。
就好比是一个规规矩矩的盒子,不能是那种奇奇怪怪扭扭曲曲的形状。
我当时就想啊,这可行域咋就这么讲究呢?就跟人似的,有的时候就得按照规矩来。
我有个朋友,他也在研究这个。
有一回我们俩凑一块儿讨论。
他眼睛瞪得老大,瞅着我就说:“你说这单纯形法里的最优解条件,咋就这么难捉摸呢?”我就撇撇嘴,跟他讲:“这就跟做人一样,有些条件就是明明白白摆在那儿的,你就得去符合,不然就得不到那个‘最优解’。
”还有啊,检验数这东西也很关键。
它就像一个个小信号灯,在告诉你走的路对不对。
如果这些小信号灯都按照一定的规则亮起来,那就说明你离那个唯一最优解不远了。
我当时看这些检验数的时候,就感觉自己像是个交通指挥员,在判断每个路口的信号灯是不是正常工作。
在单纯形表里面,那些数字的排列也有讲究。
每一行每一列就像一个个小格子间,里面住着数字居民。
这些居民得相互配合,要是有一个调皮捣蛋的,那这个唯一最优解可能就找不到了。
我有时候看着那些单纯形表,就想象自己走进了一个数字的王国,我得和这些数字居民好好沟通,让它们听话,给我指出通向唯一最优解的道路。
你要是不注意这些个条件啊,就像在大雾天里走路,迷迷糊糊的,根本找不到方向。
我自己就有过这样的经历,稀里糊涂地算,结果算出来的东西完全不对头。
当时那个懊恼啊,恨不得把那些纸都撕了。
可是撕了也没用啊,还得重新坐下来,耐着性子,再去看看那些条件,看看那些数字,就像重新审视一群熟悉又陌生的朋友。
单纯形法求最优解问题及一些知识点整理

单纯形法求最优解问题题目(老师布置的那道作业题):2153max x x f +=,其中⎪⎪⎩⎪⎪⎨⎧=≥=++=+=+5,4,3,2,1,0182312245214231j x x x x x x x x j ,求2153max x x f +=的最大值。
这张表是根据题目画的,Cj (行向量)为5432100053max x x x x x f ++++=中各个变量的系数,Ci (列向量)为与X B (列向量)相对应的各项的系数,X B 称为基变量(3列,由题目中的方程个数决定),起初的基变量由构造的变量x3、x4、x5组成,b 为对应三个方程等式右边的常数,z j 为Ci 各列与xj 各列乘积的和,如z1=0*1+0*0+0*3=0。
i θ为判别将哪个基变量换出的依据,根据c j -z j 为正,要先将x2换入XB 中,关键是判断x3、x4、x5哪个跟x2换,这就要根据各列各列除以2x B i X =θ,与所得的最小的i θ对应的XB 换,如上表可知x2跟x4换,换完之后注意原来x4所对应的列向量为[0 1 0]T ,故要将x2所对应的列向量变换为为[0 1 0]T ,注意b 也要跟着变化,于是得下表.由上表知c 1-z 1=3>0,故仍需将x1换入XB 中,用各列各列除以2x B i X =θ,与所得的最小的i θ对应的XB 换,结合i θ可知,x1跟x5换,于是得下表。
由上表可知c j -z j 均非正,故5432100053max x x x x x f ++++=取最大值时,⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=00662x ,对应的最大值36max =f .系统工程导论知识点整理:系统是由相互作用和相互依赖的若干组成部分(要素)结合的具有特定功能的有机整体。
系统的特征:整体性、相关性、目的性、环境适应性。
系统的功能是指系统与外部环境相互作用所反映的能力。
结构是功能的内在根据,功能是结构的外在表现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单纯形法求最优解问题
题目(老师布置的那道作业题):2153max x x f +=,其中
⎪⎪⎩
⎪⎪⎨
⎧=≥=++=+=+5,4,3,2,1,018231224521
4
231j x x x x x x x x j ,求2153max x x f +=的最大值。
这张表是根据题目画的,Cj (行向量)为5432100053max x x x x x f ++++=中各个变量的系数,Ci (列向量)为与X B (列向量)相对应的各项的系数,X B 称为基变量(3列,由题目中的方程个数决定),起初的基变量由构造的变量x3、x4、x5组成,b 为对应三个方程等式右边的常数,z j 为Ci 各列与xj 各列乘积的和,如z1=0*1+0*0+0*3=0。
i θ为判别将哪个基变量换出的依据,根据c j -z j 为正,要先将x2换入XB 中,关键是判断x3、x4、x5哪个跟x2换,这就要根据各列各列除以2x B i X =θ,与所得的最小的i θ对应的XB 换,如上表可知x2跟x4换,换完之后注意原来x4所对应的列向量为[0 1 0]T ,故要将x2所对应的列向量变换为为[0 1 0]T ,注意b 也要跟着变化,于是得下表.
由上表知c 1-z 1=3>0,故仍需将x1换入XB 中,用各列各列除以2x B i X =θ,与所得的最小的i θ对应的XB 换,结合i θ可知,x1跟x5换,于是得下表。
由上表可知c j -z j 均非正,故5432100053max x x x x x f ++++=取最大值时,⎥⎥⎥⎥⎥
⎥⎦
⎤⎢⎢⎢⎢⎢⎢⎣⎡=00662x ,
对应的最大值36max =f .
系统工程导论知识点整理:
系统是由相互作用和相互依赖的若干组成部分(要素)结合的具有特定功能的有机整体。
系统的特征:整体性、相关性、目的性、环境适应性。
系统的功能是指系统与外部环境相互作用所反映的能力。
结构是功能的内在根据,功能是结构的外在表现。
系统功能的特性:易变性、相关性。
系统工程就是用科学的方法规划和组织人力、物力、财力,通过最优途径的选择,使人们的工作在一定期限内收到最合理、最经济、最有效的效果。
科学的方法:从整体观念出发,通盘筹划,合理安排整体中的每一个局部,以求得整体的最优规划、最优管理和最优控制,使每个局部都服从一个整体目标,力求避免资源的损失和浪费。
系统工程方法论的基本原则:整体性、有序相关、目标优化、动态性、分解综合、创造思维。
系统工程三维结构:时间维、逻辑维和知识维。
系统预测的分类:定性、定量、组合预测。
回归分析法包括:一元线性回归法、多元线性回归和非线性回归法。
非线性回归模型:
(1)多项式曲线回归模型
2cx bx a y ++=,令x x =1,22x x =,原式变为21cx bx a y ++=;
(2)双曲线模型 ①b x a x bx a y +=+=,令x z 1
=,则b az y += ②bx a x y +=
,则b x
a
x bx a y +=+=
1,b x a y +=ˆˆ (3)幂函数模型
b ax y =,则x b a ax y b ln ln ln ln +==,令y y
ln ˆ=,x x ln ˆ=
线性规划三要素:决策变量、目标函数、约束条件
网络图的基本要素有工作、事项、工时和目标,其中工作需要消耗一定的资源,事项既不消耗资源,也不占用时间。
在网络图的所有线路中,路长最大的线路称为关键线路(也称临界线路、主要矛盾线路)。
网络图的编绘需要经过三个步骤:任务的分解分析、画网络图和事项编号。
系统评价的评价原则: 要保证评价具有一定的客观性;要保证方案的可比性;评价指标要成体系。
常用的系统评价方法:单项评价法、经济评价方法。
大题目我估计有以下几个题目必考: 线性规划模型转化为标准型问题 单纯形表问题
根据网络分析明细表画网络图。