斗轮堆取料机斗轮驱动液压系统设计(液压系统经典设计实例)
门式斗轮堆取料机起升机构液压系统分析及优化
门式斗轮堆取料机起升机构液压系统分析及优化徐万鑫【摘要】Based on the load and movement characteristics of hoisting mechanism of travelling beam in gantry bucket wheel stacker/reclaimer, the paper summarizes design requirements by hydraulic system of hoisting mechanism, analyzes the principle of hydraulic system for existing travelling beams, points out their defects and shortcomings, and comes up with the optimization proposal for hydraulic system aiming at continuous improvement of energy-saving and safety performance of the equipment, and the large-scale development trend.%根据门式斗轮堆取料机活动梁起升机构载荷及运动特点,总结起升机构液压系统设计要求,进而对现有的活动梁起升机构液压系统原理进行分析,指出其缺陷和不足,并针对设备节能、安全性能要求不断提高以及大型化的发展趋势,提出该液压系统的优化改进方案.【期刊名称】《起重运输机械》【年(卷),期】2012(000)008【总页数】4页(P110-113)【关键词】门式斗轮堆取料机;起升机构;液压系统;优化改进【作者】徐万鑫【作者单位】长春发电设备有限责任公司长春130033【正文语种】中文【中图分类】U653.928.+5门式斗轮堆取料机 (以下简称门式斗轮机)是一种连续、高效的散状物料装卸输送设备,其结构形式见图1,由于其生产率高、有一定的混匀效果、料堆便于管理、结构简单、操作方便和易于实现自动化控制等优点,广泛应用在大型火力发电厂、工矿企业及港口散状物料储料场。
斗轮堆取料机斗轮机构驱动改造方案
斗轮堆取料机斗轮机构驱动改造方案批准:复审:初审:编制:2013年05月28日斗轮堆取料机斗轮机构驱动改造方案一、设备现状D285堆取料机(DQL600/600〃30),由湖南长重机器股份有限公司于2009年7月开始设计制造,2011年年初正式投入实用。
1.机器的基本参数为(参照技术协议规范书):(1)斗轮堆取料机形式机械式全爬尾车型号 DQL600/600.30额定生产率堆料 600(t/h)取料 600(t/h)斗轮机构:斗轮直径φ5000mm斗轮个数 8驱动方式液压马达驱动(赫格隆)驱动功率 55kw2. 环境条件多年平均气温:8.3℃多年极端最高气温:41.3℃多年极端最低气温:-32.3℃多年最大积雪深度:41cm历年最大冻结深度150cm二、设备使用出现的问题和不足1、由于冬天温度极低,有时气温最低将达-35℃,液压马达的油路系统虽有加热和保温装臵,但冬季工作依然故障频繁发生,甚至不能正常工作,严重影响斗轮机构的正常取料。
2、液压马达维护困难,维护成本高。
由于液压马达是将液压能转换为机械能,液压力很大,对其密封性能要求很高,而斗轮堆取料机使用的环境很恶劣,马达的密封圈等部件经常需要更换,每年更换这些零件的成本就大约几万元;3、液压马达驱动电气控制系统复杂故障判断排除困难,控制部分包括冲洗电机、冷却电机、油加热电机、液压马达主控电机的控制及这些信号的反馈控制等,若这些控制中任何一个控制系统出现问题,与斗轮机主机信号连锁报警,都可以能导致液压马达无法正常使用。
三、设备改进建议针对以上分析可以看出采用液压马达驱动在使用过程中因客观存在原因,暴露居多问题和不足,建议采用机械传动的方式,即电机→液力耦合器→减速器→驱动轴,减速机与驱动轴之间采用花键联接。
采用机械驱动控制简单,安装调试维修方便、成本低。
采用机械方式驱动,安全可靠,当斗轮机构出现过载的时候,液力耦合器可以对电机和减速器起到保护作用。
臂架型斗轮堆取料机俯仰液压系统分析
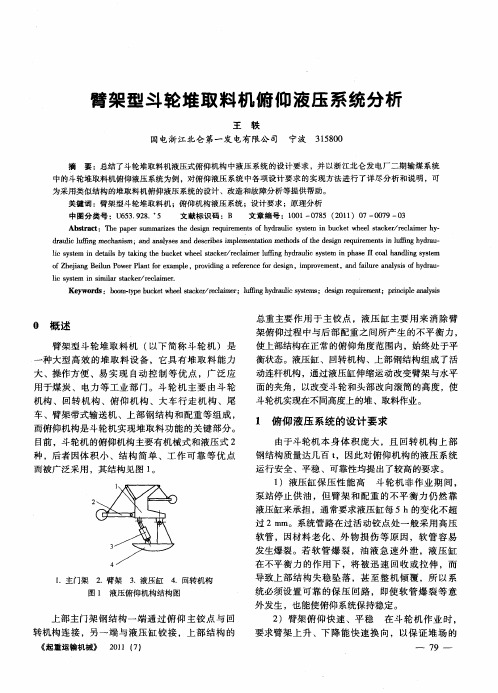
1 .主门架 2 .臂架 3 .液压缸 4 .回转 机构 图 1 液压俯仰 机构 结构图
导致上部结构失稳 坠落 ,甚 至整机倾覆 ,所 以系 统必须设 置可靠 的保压 回路 ,即使软 管爆裂等意 外发生 ,也能使俯仰系统保持稳定。 2 )臂架俯仰快速 、平稳 在 斗轮机作业 时 ,
液压 系统的设计要求
由于 斗轮 机 本 身 体 积 庞 大 ,且 回 转 机 构 上 部 钢结 构质 量达 几百 t ,因此对 俯 仰 机 构 的液 压 系 统 运 行 安全 、平稳 、可靠 性均 提 出 了较 高 的要求 。 1 )液 压 缸 保 压 性 能 高 斗 轮 机 非 作 业 期 间 ,
2 1 液压 缸 良好 的保压 性能 . 主泵 为径 向恒压 变量柱 塞泵 ,泵 的流 量 由 P和
连通 ,2阀各 自封 闭 ,可 将液 压缸 锁 定在 任 何位 置 上 。即使 油路 中 的 软 管 爆 裂 ,液 压 缸 油 口被 液 控
x口的压差 自动调节 ,此套液压系统主泵的出口压 力由连 接 主泵 x 口的 电磁 溢 流 阀 ( 设定 压 力 为 1 P )所控制 。当电机 启动 瞬 间 ,电磁 溢流 阀得 8M a
o hj n e u o e l to xm l, rv ig f e c r ei , m r e n, dfi r aa s yru f e agB i nP w r a r a pe poi n r e n e s Z i l P nf e d aer o f d g i po met a l e n yio h da- n v n au l s f
压差 一致 。
缸快速运动 的同时不 能有 严重冲击 ,以免造 成过 大 的瞬 时倾 覆 力矩 ,危 害整 机稳定 性 。
臂式斗轮堆取料机俯仰液压系统分析

臂式斗轮堆取料机俯仰液压系统分析l引言臂式斗轮堆取料机是一种大型高效堆取料设备。
它具有堆取料能力大,料场占地面积小,操作方便,实现自动控制等优点而被工业部门广泛使用。
近30年来,由于燃煤火力发电机组的容量迅速增长,输煤系统也随之大型化。
这种变化对输煤系统的可靠性和生产率提出了更高的要求。
输煤系统选用什么堆取设备主要取决于电厂的总装机容量,即耗煤量。
现代大型火力发电厂的输煤系统普遍采用臂式斗轮堆取料机这种大型高效堆取设备。
臂式斗轮堆取料机俯仰机构的作用是支承斗轮和臂架的重量,并能改变斗轮的高度,使斗轮可以在不同高度上堆料和取料。
它的工作安全可靠性非常重要。
一旦发生臂架坠落事故,会造成斗轮堆取料机严重破坏。
臂式斗轮堆取料机的俯仰机构有机械和液压两种型式。
后者具有体积小,结构简单,维修量小,工作可靠等优点而被广泛采用。
液压俯仰机构如图1所示。
臂架后端铰接在门柱上,液压缸一端铰接在门柱下方,另一端铰接支承在回转机构上,来实现臂架的俯仰动作,使斗轮达到不同高度。
目前,由于投资的多元化,我国火力发电厂的输煤系统和其它行业现役的臂式斗轮堆取料机既有国产的,又有国外的。
由于俯仰机构液压系统不同而导致不同厂家的斗轮堆取料机的安全可靠性差别很大。
为此,本文对我国两家具有代表性火力发电厂输煤系统中的臂式斗轮堆取料机的俯仰液压系统进行分析比较,以期对我国臂式斗轮堆取料机性能的提高有所帮助。
2两种俯仰液压系统分析比较图2所示为装在辽宁绥中发电厂,由俄罗斯生产的斗轮堆取料机的俯仰液压系统。
图3为用于河北邯峰发电厂,由上海水工机械厂生产的臂式斗轮堆取料机俯仰液压系统。
从原理和动作过程来看,两者差别很大。
(l)液压泵两系统都采用轴向柱塞泵作为液压驱动装置,用溢流阀控制系统的压力。
在泵的出口都接有滤油器,以防系统混人杂质。
图2的滤油器旁并联有单向阀。
这样,可以在不停机的情况下更换滤油器。
而图3所示系统中滤油器旁没有并联单向阀。
因此,必须在停机状态下更换滤油器。
斗轮堆取料机俯仰液压系统的合理设计及运用

斗轮堆取料机俯仰液压系统的合理设计及运用摘要:本文介绍了斗轮堆取料机一般采用液压系统俯仰机构实现机器在不同高度上的堆料和取料作业和如何合理设计俯仰液压系统原理图及外购件的选型。
关键词:斗轮堆取料机,俯仰机构,俯仰液压系统1前言俯仰机构是斗轮堆取料机实现堆取功能的关键部分。
我厂设计的俯仰机构基本采用液压系统驱动,因为采用液压系统驱动能保证机器的出力要求和整机的稳定性要求外,又能减轻整机重量和体积和保证各机构驱动性能好,不易产生激励冲击,使机器实现软特性保证,而不易损坏机械设备,并且维修量小,工作可靠,寿命长。
而采用钢丝绳卷扬机械驱动变幅,由于变幅频率比较高,容易钢丝绳跳槽,磨损,乱绳,而且稳定性差,造成机器不能正常使用。
液压俯仰机构工作过程即上部钢结构一端通过俯仰主铰点与回转平台连接,另一端与液压缸铰接。
液压缸承担上部结构的重量,与配重一起实现上部结构的平衡稳定,液压缸、回转平台、上部钢结构组成了活动连杆机构,通过液压缸伸缩运动改变悬臂与水平面的夹角。
2概述斗轮堆取料机是电厂、矿山及港口常用的大型运输设备,其自身质量大、体积大,输出力也较大。
由于斗臂较长,负载力较大,因而在取料过程中会产生较大的惯性力,对安全性、平稳性和可靠性要求很高,因而对液压俯仰机构的要求也很高,如果俯仰机构的液压油路结构设计不合理,往往会使斗臂产生较大的振动,影响正常工作,甚至发生事故。
本文对斗轮堆取料机俯仰液压系统进行了合理的分析及正确运用。
3斗轮堆取料机俯仰液压系统的设计3.1俯仰液压系统的工作原理在受压的角度范围内液压系统做正功。
当俯仰角度达到油缸受拉的俯仰角度时液压系统做负功,也就是说由外力拉动油缸运动;在相反俯仰角度从最高的俯仰角度运动到最低角度时通常油缸的受力状态是从受拉到受压。
为实现油缸的伸缩需要设计方向控制回路。
根据系统的这种载荷的变化,液压系统需要相应的满足这种载荷变化的要求。
一般油缸单纯受压的俯仰液压系统相对简单。
斗轮机尾车液压系统的改进
胜利发电厂是中国石化集团胜利油田的自备电厂,装机容量为1040MW。
煤场布置了两台不同厂家,型号都是DQL1000/1000•30型斗轮堆取料机,担负着全厂的供卸煤任务,尾车都采用折返式,尾车升、降通过液压系统来实现的。
其中2号斗轮堆取料机自2003年投产以来,由于斗轮堆取料机尾车的两个液压缸动作不同步,在存煤和取煤两种状态转换时,经常出现尾车臂架一侧高、一侧低,且有卡塞问题,经过长期反复扭转,尾车臂架先后多次发生疲劳断裂,为此数次请厂方来人处理,一直未能彻底解决,影响了输煤系统及机组的安全运行。
1 2号斗轮堆取料机尾车液压系统结构及运行原理2号斗轮堆取料机尾车液压系统工作原理如(图1)所示,通过齿轮油泵供油,使液压缸收缩达到尾车机架升降的目的。
当尾车臂架上升时,液压油通过三位四通阀经单向阀、节流阀进入双作用液压缸下腔,使液压缸上升顶起臂架,同时进油管内的高压油顶开回油管路上的液控单向阀控制回油总量。
当尾车臂架下降时,液压油通过三位四通阀经单向阀、节流阀进入双作用液压缸上腔,使尾车臂架下降,同时进油管内的高压油顶开液压缸下腔油管上的液控单向阀,控制液压缸下腔的回油数量,达到控制尾车臂架下降速的目的。
2 尾车液压系统存在的问题我厂2号斗轮堆取料机投入使用已有5年时间,尾车采用双作用液压缸,由于升降过程中两个液压缸不同步,出现尾车钢架横向工字钢多次断裂,尾车臂架出现扭转变形现象。
表现为尾车臂架起升时,则左侧液压缸先起升100多毫米后,保持这一高差状态两液压缸同步升高,上升快到位时,左侧液压缸停止,右侧液压缸继续升高直到两侧液压缸调平;下降过程开始时右侧液压缸先下降100多毫米,然后保持这一高差同步下降。
当右侧臂架与支座接触后,左侧仍继续下降,直到左侧落到支座上为止。
3 故障原因分析及改进措施现场实际应用中,双作用液压缸下降时,由于受臂架自重及液压缸上腔压力油的双重作用,当液压缸下腔液控单向阀打开后,若下腔回油流量大时,活塞会快速下降,从而上腔进油量也相应很大,这会造成系统油压骤降,继而液控单向阀因油压太低自动关闭,液压缸停止下降,此后油压便急剧升高,再次打开单向阀。
斗轮机液压系统优化设计
斗轮机液压系统优化设计江苏华电戚墅堰发电有限公司燃料部王晓斌摘要:针对斗轮机液压系统渗漏故障频发和更换液压元件难度较大的现状,结合增加执行机构需求,对斗轮机液压系统进行增加功能和优化设计,彻底解决了液压系统渗漏故障。
优化设计后的液压系统结构紧凑,外形美观,维修方便,工作可靠。
关键词:液压系统;螺纹连接;板式连接;液压集成块;挂钩;设计;优化;效果0 引言我部门使用的两台悬臂式斗轮堆取料机由哈尔滨重型机器厂生产,型号:DQL600/450.25,堆料出力:600t/h,取料出力:450t/h,回转半径:25m。
液压系统是斗轮机的主要组成部分,有主液压系统和尾车液压系统,液压系统大部分元件采用螺纹连接,整个液压系统渗漏情况较为严重。
液压元件更换难度较大,为消除液压元件安装尺寸误差,只能采用割除油管后再重新焊接的工艺,更换后液压元件和管道存在装配应力,耗时且易发生渗漏。
更换液压元件,由螺纹连接的改成板式连接的,主液压系统和尾车液压系统均增加部分液压元件,以满足增加功能需要。
设计液压系统和设计、制作液压集成块,把绝大部分液压元件安装在整体钻孔式液压集成块上,是降低液压元件更换难度和解决液压系统渗漏最行之有效的方法。
优化设计后的液压系统结构紧凑,外形美观,维修方便,且不易渗漏,有效地提高了液压系统的工作可靠性。
1 斗轮机原主液压系统1.1原主液压系统原理图原主液压系统原理图如图1所示:图1:原主液压系统原理图分析原主液压系统原理图,可以看出,主液压系统主要由三个动力元件、两个执行元件和一个控制元件构成。
1.2原主液压系统原理1.2.1补油部分原理动力元件1(齿轮泵)从油箱吸入液压油,液压油进入油泵进口,由油泵出口进入滤油器和单向阀,然后进入回转和斗轮旋转闭式循环液压系统中,以补充油泵和油马达的泄油损失。
动力元件1(齿轮泵)主要起补油作用,故也称作补油泵。
补油压力整定值1.5MPa,通过调整YF-L10C溢流阀以得到合适的补油压力。
斗轮堆取料机俯仰机构

4
HYDAC
42
单向阀
M-SR20KE05-1X/
4
力士乐
43
溢流阀
DBDS20K1X/200
4
力士乐
44
截止阀
KHP-20-1114-02X-E-2.000
4
HYDAC
45
压力传感器
HM12-1X/250
4
力士乐
46
液压缸
2
五、集成阀块设计
设计准则:
明确油路的连接方式,满足装配和配管要求 元件与油路块相连处要保证强度 应充分利用油路块体积,尽量减少油路块的闲置空间 油路块应具有良好的工艺性,油路块应能满足系统设计
三、液压缸设计计算
3.缸头缓冲
缓冲圈上有一系列轴 向长度不等的缓冲槽,其 与缓冲套、锁紧圈和缸头 配合使用,可以实现液压 缸的平稳缓冲,有效防止 由于液压缸的突然起停对 系统造成的液压冲击。
三、液压缸设计计算
4.缸底缓冲
缸底缓冲采用了沿轴向分布的一 系列小孔来完成。当缓冲活塞进 入缸底与之对应的缓冲孔时,活 塞和缸底间形成一个封闭腔。随 缓冲柱塞的运动,节流小孔不断 减少,封闭腔内油液压力不断升 高,使活塞速度逐渐减小,最终 实现均匀减速。
四、液压系统简介
四、液压系统简介
四、液压系统简介
序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21
名称 油箱
放油球阀 温度继电器
空滤器 液位开关 加热器
球阀 蝶阀 避震喉 软管 轴向柱塞泵 齿轮泵
电机
软管 软管 高压过滤器 高压过滤器 压力表 压力表 端子箱 溢流阀
护量少 操作简单 安全可靠
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
斗轮堆取料机整机质量一般在200t以上,其中上部金属结构重 达150t。该设备可进行整机行走,并实现上部金属结构俯仰、臂架 旋转、斗轮旋转、机内传动带运行等运动,从而完成手动和就地取 料、堆料作业。
5.1 斗轮堆取料机斗轮驱动液压系统设计要求 组合机床动力滑台液压系统
在实际的工作过程中,斗轮堆取料机是散料输送系统的始端 或末端。斗轮堆取料机最常用的工艺流程为: (1)翻车机卸车→带式输送机系统→斗轮堆取料机堆料到料场 →斗轮堆取料机取料→带式输送机系统→发电厂配煤仓(装船机装 船(翻车机_标清.avi、翻车机试翻(电厂)_标清.avi、曹妃甸装 船机鸟瞰_标清.avi、装船机未使用除尘器效果 广州市赣丰机械 设备有限公司工程案例_标清.avi) (2)卸船机卸船→带式输送机系统→斗轮堆取料机堆料到料场 →斗轮堆取料机取料→带式输送机系统→装火车系统装车)(车载 式螺旋卸船机_标清.avi、链斗式连续卸船机_高清.avi、卸船机 在运行_高清.avi、抓斗挖掘机卸煤_标清.avi) 斗轮堆取料机需要堆料时,地面带式输送机上来的物料经尾 车头部滚筒卸入料斗中。料斗位于堆取料机回转中心,可在任意 位置将物料供给悬臂传动带机构。利用回转机构和俯仰机构的配 合运动,可将悬臂传动带抛出的物料卸到轨道两侧的整个堆场上。 俯仰机构用来调节堆料的高度。 进行取料作业时,启动斗轮机构使斗轮转动,斗轮便切入料 堆挖取物料,靠自重使物料从斗内落到固定料槽上,进而滑到悬 臂传动带机构上,然后经中心料斗送入地面带式输送机上。
液压系统传动设计 第 5章 斗轮堆取料机斗轮驱动 液压系统设计
5.1 斗轮堆取料机斗轮驱动液压系统设计要求
ቤተ መጻሕፍቲ ባይዱ
斗轮堆取料机是在现代化工业中对大宗散装物料进行连续装 卸、堆取合一的高效轨道式装卸设备,主要应用于发电厂、煤矿、 港口码头等地,是对煤炭、沙子、石子等散料进行输送、堆取作 业的主要工程机械。 斗轮堆取料机类设备通常包括堆取料机(视频“G斗轮堆取料 机-泰富集团_高清.avi”)、取料机(视频“斗轮取料机-泰富集团 _高清.avi”)、堆料机(视频“堆料机-泰富集团_标清.avi”)、混 匀取料机、混匀堆料机等。其中堆取料机具有堆取功能,取料机、 堆料机只有取料或堆料功能,混匀取料机与混匀堆料机除具有取 料与堆料功能外还具有均化功能,以满足用户对物料均化的要求。 使用最多的是堆取料机,其原因使此类设备功能较齐全,可满足 大多数条件下的需要。 (视频“世界上最大的挖掘机:斗轮式挖掘机 Bagger 293_高 清.avi”)
5.2 工况分析
如果用一个小于1的系数k’把物料之间的相互作用力F1和 物料与铲斗壁之间的摩擦力Ff归算到重力Fg,则有
即 如果令系数k=sqrt(k’),则有
取重力与离心力相等的极限情况作为设计原则,此时极 限切向速度为 式中,k是一个小于1的修正系数,与物料特性以及工作 状态等有关,一般k的取值范围为0.2~0.65,本设计取k=0.5。
因此,取斗轮最大转速为9r/min。
5.3 初步确定方案 组合机床动力滑台液压系统
5.3.1 电动机和减速器驱动方式 采用电动机驱动斗轮的设计 方案是近几年常用的驱动形式, 如图5-5所示。 这种驱动方式通常采用一级 伞齿轮和二级行星齿轮传动进行 减速,因此,局部结构比较紧凑。 但由于采用了电动机作为动力, 液力耦合器作为连接器件,且伞 形齿轮传动副在啮合过程中易发 热而引起温升,因此还需要一台 齿轮泵单独进行局部润滑,所以 总体结构外形尺寸较大,总体重 量也较重。
5.1 斗轮堆取料机斗轮驱动液压系统设计要求 组合机床动力滑台液压系统
(2)回转机构液压系统 回转机构作用通过驱动 装置驱动斗轮堆取料机斗轮 悬臂围绕着旋转中心做水平 方向回转运动,与俯仰机构 和行走机构配合实现斗轮堆 取料机在某一固定地点或某 一工作范围内对物料的转运。 回转机构驱动装置结构 形式通常采用行星齿轮驱动 方式和液压马达驱动方式。 采用行星齿轮驱动方式 的回转机构存在着传动效率 低、齿轮易磨损、过载不可 保护等缺点。 液压马达驱动方式的回 转机构液压系统原理如图5-3 所示。
5.1 斗轮堆取料机斗轮驱动液压系统设计要求 组合机床动力滑台液压系统
(3)斗轮驱动液压系统 斗轮液压驱动系统是驱动斗轮回转,从而完成取料和堆料 作业的工作装置。 斗轮及其驱动装置通常安装在斗轮堆取料机的悬臂带式输 送机前端,这样的结构布局会带来两个方面的问题:一是斗轮 及其驱动装置的质量相对于整体质心会形成巨大的自重力矩, 斗轮及驱动装置的质量大小直接影响着悬臂架的设计机构、尺 寸和平衡架上的配重质量,乃至整机质量;二是传动系统的振 动和斗轮堆、取料时产生的振动激励会引起悬臂架及平衡架的 剧烈振动,进而影响整机的工作稳定性。 因此,在设计斗轮驱动装置时,要合理布局,优化斗轮及 其传动装置结构,尽量减小该部分质量。 本章的设计就是针对斗轮驱动的设计。
5.2 工况分析 组合机床动力滑台液压系统
如果回转平台静止不动, 斗轮只在垂直平面内做圆周 切割运动,可以认为斗轮只 受到圆周切割阻力F圆和法向 力F法的作用。假定法向力指 向轴心,则作用在斗轮轴上 的负载扭矩就完全是由F圆引 起的。这也是液压马达所需 克服的阻力矩。 由斗轮上的圆周切割阻 力F圆引起的作用在斗轮轴上 的负载扭矩可表示为
5.1 斗轮堆取料机斗轮驱动液压系统设计要求 组合机床动力滑台液压系统
5.1.3 斗轮堆取料机工作要求 (1)堆料作业要求 悬臂梁仰角固定,定点堆料一次后达到料堆高度,而后大车走 行定值距离,调整料堆落点,继续沿斜坡堆料。这种堆料方法在料 场初始堆料时,悬臂可低些,以免粉尘太大造成环境污染,随着堆 料增高,悬臂逐渐上仰,当达到规定的料堆高度后,悬臂的仰角固 定,然后靠慢速行走方式依次堆料。因此在取料作业时,悬臂俯仰 系统应具有一定的平衡锁紧功能,从而对斗轮悬臂梁进行仰角调整 和固定。行走机构应具有良好的无极调速功能,以保证这一作业过 程中实现慢速走行和走行速度的调整。 由于斗轮堆取料机俯仰装置的工作负载有时使液压缸伸出,有 时使液压缸缩回,且工作负载均有垂直方向的分量,所以液压回路 需采用液控单向阀和节流阀组成的平衡回路。工作时液压泵在斗轮 堆取料机工作期间应不间断持续运行,俯仰动作由电磁换向阀控制; 为防止悬臂发生失稳和超压现象,液压系统还应设有安全闭锁装置 及超压保护装置;同时,还要保证液压系统具有可靠地密封,使整 个液压系统不得有漏油现象。
5.1 斗轮堆取料机斗轮驱动液压系统设计要求 组合机床动力滑台液压系统
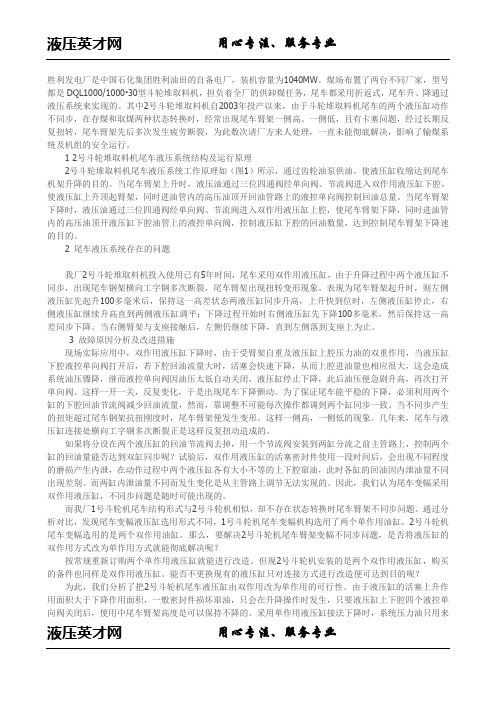
5.1.1 斗轮堆取料机结构 斗轮堆取料机主要结构如图5-1所示,各部分功能如表5-1所示。
5.1 斗轮堆取料机斗轮驱动液压系统设计要求 组合机床动力滑台液压系统
5.1 斗轮堆取料机斗轮驱动液压系统设计要求 组合机床动力滑台液压系统
5.1 斗轮堆取料机斗轮驱动液压系统设计要求 组合机床动力滑台液压系统
(2)堆料作业要求 斗轮堆取料机在取料时采用以回转为主的分层取料方式。其 过程是取上部第一层→几个走行进尺与回转几个单程→…第N层→ 几个走行进尺与回转几个单程,如此反复达到连续取料目的。在 这一作业过程中,要求对斗轮悬臂回转系统和斗轮驱动系统进行 合理的控制和调节,以控制斗轮悬臂回转范围及斗轮转动速度。 为实现斗轮回转运动,对液压系统有如下要求: (1)在液压马达的驱动下,斗轮悬臂应能在水平方向做两个方 向的转动,即液压马达需要换向。 (2)悬臂在转动时,由于悬臂转动,离轨道不同距离的物料其 堆取料的速度不一样。离轨道越远其堆取速度越慢,为了能使斗 轮保证每次为满斗,故要求悬臂的转动有一个先快后慢的调节过 程,因此液压系统所采用变量泵驱动液压马达,以实现速度调节。 (3)为达到足够的堆取料工作范围,斗轮悬臂应足够长,形成 典型的细长悬臂结构,因此在回转过程中容易出现颤振现象,回 转液压系统的设计应尽量保证斗轮悬臂回转过程中的平稳性。
5.1 斗轮堆取料机斗轮驱动液压系统设计要求 组合机床动力滑台液压系统
5.1.2 斗轮堆取料机工作装置液压系统 斗轮堆取料机的工作装置包括俯仰机构、回转机构和斗轮驱动 机构。 (1)俯仰机构液压系统 俯仰机构作用是调节堆料、取料时悬臂高度,并支撑斗轮和臂 架重量,使斗轮可以再不同高度堆取料。 悬臂俯仰机构采用钢丝绳卷扬驱动方式或液压缸驱动方式。 钢丝绳卷扬驱动方式采用钢丝绳通过滑轮组绕到俯仰卷筒上, 电动机经减速器驱动卷筒旋转,使钢丝绳绕上卷筒或从卷筒中放出 从而改变悬臂幅度。 由于液压驱动装置能较好地适应外载荷变化和进行无极调速, 较机械传动机构体积小、结构简单、运行平稳、使用维修方便,故 液压缸驱动斗轮机应用越来越广泛。 斗轮堆取料机体积庞大,输出力也大。由于悬臂较长,负载力 大,因而在取料过程中会产生较大惯性力。其液压缸驱动方式通常 由两个并联液压缸同时、同步动作,俯仰机构中的悬臂配重和斗轮 等部件构成液压缸活塞组件伸缩运动时的超越负载。
5.2 工况分析 组合机床动力滑台液压系统
当斗轮切向速度v小于极限速度vlim时,斗轮中垂直上方 的物料所受的离心力小于重力,这样才能保证可靠卸料。考 虑到物料之间的相互作用力以及物料与铲斗壁之间的摩擦力、 粘着力等因素对物料自卸时的影响,实际斗轮切向速度应比 极限速度小得多。 根据已知设计参数和前述分析,计算得到斗轮边缘最大 切向速度为vlim=2.53m/s。 斗轮转速n可计算为
5.1 斗轮堆取料机斗轮驱动液压系统设计要求 组合机床动力滑台液压系统
5.1.4 斗轮驱动液压系统的设计要求 (1)为了使传送带正常工作,即传动带不能超过其额定负载, 也不能使传送带某部分空载,所以斗轮的转动应为匀速运动,并 每次取料时应为满斗,调高传送带的利用率,以提高堆取料率。 (2)由于斗轮机工作时,利用斗轮堆取物料,其外负载惯性力 大,因此本系统采用闭式循环系统。闭式液压系统即液压泵的进 出油口与液压马达的进出油口分别用管道连接,液压马达的回油 不回油箱而直接进入液压泵的吸油口,形成闭合回路。 (3)液压马达与液压泵的楼油管应单独回油箱,以避免造成其 内腔油压过高,致使其轴端油封损坏而产生漏油。 (4)设置必要的过载保护装置,可采用安全阀,其回油应进入 液压泵的吸油,不会到油箱。一旦斗轮驱动马达过载,安全阀开 启后,该闭式回路油液应能得到及时补充;而当负载下降以后, 可避免由于压力无法迅速回升,致使驱动无力。 5.1.5 本设计实例的设计参数 (1)斗轮所受到的总的圆周切割力为29000N; (2)斗轮直径为5.2m。