机器人专业词汇中英文对照
Robots机器人 中英文翻译
RobotsA robot is an automatically controlled, reprogrammable, multipurpose, mani pulating machine with several reprogrammable axes, which may be either fixed in place or mobile for use in industrial automation applications.The key words are reprogrammable and multipurpose because most single-purpose machines do not meet these two requirements.The term”reprogrammabl e” implies two things:The robot operates according to a written program can b e rewritten to accomdate a variety of manufacturing tasks. The term “multipurp ose” means that the robot can perform many different functions, depending on the program and tooling currently in use.Over the past two decades,the robot has been introduced into industry to perform many monotonous and often unsafe operations. Because robots can per form certain basic tasks more quickly and accurately than humans, they are bei ng increasingly used in various manufacturing industries.Structures of RobotsThe typical structure of industrial robots consists of 4 major components: the manipulator, the end effector, the power supply and control syterm.The manipulator is a mechanical unite that provides motions similar to those of a human arm. It often has a shoulder joint,an elbow and a wrist. It can rotate or slide, strech out and withdraw in every possible direction with certain flexibility.The basic mechanical configurations of the robot manipulator are categorized as Cartesian, cylindrical, spherical and articulated.A robot with a Cartesian geometry can move its gripper to any position within the cube or rectangle defined as its working volum.Cylindrical coordinate robots can move the gripper within a volum that is described by a cylinder. The cylindrical coordinate robot is positioned in the work area by two linear movements in the X and Y directions and one angular rotation about the Z axis.Spherical arm geometry robots have an irregular work envelop. This type of robot has two main variants,vertically articulated and horizontally articulated.The end effector attaches itself to the end of the robot wrist, also called end-of-arm tooling.It is the device intended for performing the designed operations as a human hand can.End effectors are generally custom-made to meet special handling requirements. Mechanical grippers are the most commonly used and are equipped with two or more fingers.The selection of an appropriate end effector for a special application depends on such factors as the payload, enviyonment,reliability,and cost.The power supply is the actuator for moving the robot arm, controlling the joints and operating the end effector. The basic type of power sources include electrical,pneumatic, and hydraulic. Each source of energy and each type of motor has its own characteristics, advantages and limitations. An ac-powered motor or dc-powered motor may be used depending on the system design and applications. These motors convert electrical energy into mechanical energy to power the robot.Most new robots use electrical power supply. Pneumatic actuators have been used for high speed. Nonservo robots and are often used for powering tooling such as grippers. Hydraulic actuators have been used for heavier lift systems, typically where accuracy was not also requied.The contro system is the communications and information-processing system that gives commands for the movements of the robot. It is the brain of the robot; it sends signals to the power source to move the robot arm to a specific position and to the end effector.It is also the nerves of the robot; it is reprogrammable to send out sequences of instructions for all movements and actions to be taken by the robot.A open-loop controller is the simplest for of the control system, which controls the robot only by foolowing the predetermined step-by-step instructions.This system dose not have a self-correcting capability.A close-loop control system use feedback sensors to produce signals that reflct the current states of the controed objects. By comparing those feedback signals with the values set by the programmer, the close-loop controller can conduct the robot to move to the precise position and assume the desired attitude, and the end effector can perform with very high accuracy as the close-loop control system can minimize the discrepancy between the controlled object and the predetermined references.Classification of RobotIndustrial robots vary widely in size,shape, number of axes,degrees of freedom, and design configuration. Each factor influence the dimensions of the robot’s working envelop or the volume of space within which it can move and perform its designated task. A broader classification of robots can been described as below.Fixed-and Variable-Sequence Robots. The fixed-sequence robot (also called a pick-and place robot) is programmed for a specific sequence of operations. Its movements are form point to point, and the cycle is repeated continuously.The variable-sequence robot can be programmed for a specific sequence of operations but can be programmed to perform another sequence of operation.Playback Robot. An operator leads or walks the playback robot and its end effector through the desired path. The robot memorizes and records the path and sequence of motions and can repeat them continually without any further action or guidance by the operator.Numerically Controlled Robot. The numerically controlled robot is programmed and operated much like a numerically controlled machine. The robot is servocontrolled by digital data, and its sequence of movements can be changed with relative ease.Intelligent Robot. The intelligent robot is capable of performing some of the functions and tasks carried out by huanbeings.It is equipped with a variety of sensors with visual and tactile capabilities.Robot ApplicationsThe robot is a very special type of productin tool; as a result, the applications in which robots are used are quite broad. These applications can be grouped into three categories: material processing, material handling and assembly.In material processing, robots use tools to process the raw material. For example, the robot tools could include a drill and the robot would be able to perfor drilling operaytions on raw material.Material handling consists of the loading, unloading, and transferring of workpieces in manufacturing facilities. These operations can be performed relatively and repeatedly with robots, thereby improving quality and scrap losses.Assembly is another large application area for using robotics. An automatic assembly system can incorporate automatic testing, robot automation and mechanical handling for reducing labor costs, increasing output and eliminating manual handling concers.机器人机器人是一种自动控制的、可重复编程的、多功能的、由几个可重复编程的坐标系来操纵机器的装置,它可以被固定在某地,还可以是移动的以在工业自动化工厂中使用。
关于机器人的专业术语

关于机器人的专业术语机器人是一种能够执行各种任务的自动化设备,它们可根据预先设定的程序或通过学习和适应环境来执行任务。
机器人技术已经在许多领域得到广泛应用,包括工业制造、医疗保健、农业、物流和服务业等。
在这篇文章中,我们将介绍一些与机器人相关的专业术语。
1. 人工智能(Artificial Intelligence,AI):人工智能是机器人领域的重要概念,指的是使机器能够模拟人类智能的能力。
通过使用深度学习、机器学习和模式识别等技术,机器人可以学习和适应环境,具备自主决策和问题解决能力。
2. 自动化(Automation):自动化是指使用机器和计算机控制系统来执行任务,以减少或消除人的干预。
机器人是自动化的重要组成部分,它们可以执行重复、危险或需要高精度的任务,提高生产效率和质量。
3. 传感器(Sensor):传感器是机器人的感知器官,用于获取环境信息。
常见的传感器包括摄像头、激光雷达、触摸传感器和声音传感器等。
传感器可以帮助机器人感知周围的物体、声音、温度和湿度等环境参数,从而做出相应的决策和动作。
4. 机器视觉(Computer Vision):机器视觉是一种通过摄像头和图像处理算法来模拟人类视觉的技术。
机器人可以使用机器视觉来识别和跟踪物体、测量距离和深度、进行图像分析和模式识别等任务,从而实现自主导航和操作。
5. 运动控制(Motion Control):运动控制是指控制机器人的运动和姿态的技术。
通过使用电机、伺服系统和运动控制算法,机器人可以实现精确的位置控制、路径规划和运动协调,以完成各种任务,如抓取、搬运和装配等。
6. 人机交互(Human-Robot Interaction,HRI):人机交互是指人与机器人之间的信息交流和合作。
通过使用语音识别、自然语言处理和手势识别等技术,机器人可以理解人类的指令和意图,并与人类进行语音、触摸和视觉交互,实现更加智能和自然的合作。
7. 机器人操作系统(Robot Operating System,ROS):机器人操作系统是一种开源的软件平台,用于管理机器人的硬件和软件资源。
机器人专业词汇中英文对照

ACAS Applicator Cleaner Air Supply 雾化器清洗器供气pACS Applicator Cleaner Solvent Pilot 雾化器清洗器溶剂控制阀ACS Applicator Cleaner Solvent 雾化器清洗器溶剂ACVA Applicator Cleaner Vacuum Air 雾化器清洗器真空空气ACDA Applicator Cleaner Drying Air 雾化器清洗器干燥空气BEAR Bearing Air 轴承空气BAO Bearing Air OK 轴承空气正常BRAKE Brake Air Turbine 涡轮刹车空气pBW Bell Wash Pilot 旋杯清洗控制阀BWS Bell Wash Supply 旋杯清洗供应AIR Color Change Air Supply 换色空气供应SOL Color Change Solvent Supply 换色溶剂供应CP# Color Pilot (#) = Color 颜色控制阀(#)= 颜色DUMP Dump 排放DAT Drive Air Turbine 涡轮驱动空气E-STAT Electrostatics 静电pIW Injector Wash Pilot 注射器清洗控制阀IWS Injector Wash Supply 注射器清洗供应PAINT Paint 油漆PAP Purge Air Pilot 冲洗空气控制阀pCC Pilot Color Change 换色控制阀PCE Process Control Enclosure 工艺控制柜pDUMP Pilot Dump 排放控制阀PDP Power Distribution Panel 配电柜PIE Process Interface Enclosure 工艺接口柜PREG Pilot Regulator 调节器控制阀PR# Paint Return (#) = Color 油漆回路(#)= 颜色PS# Paint Supply (#) = Color 油漆进路(#)= 颜色pPS Purge Solvent Pilot 冲洗溶剂控制阀pTRIG Pilot Trigger 触发器控制阀PTS Pilot Trigger Supply 触发器供应控制阀RP Robot Purge 机器人净化SA1 Shaping Air (Bell Applicator) 成形空气(旋杯雾化器)SA2 Shaping Air (Bell Applicator) 成形空气(旋杯雾化器)SAP Shaping Air Pilot 成形空气控制阀SAS Shaping Air Supply 成形空气供气SCC System Control Console 系统控制柜TDP Turbine Drive Pilot (Bell Applicator) 涡轮驱动控制阀(旋杯雾化器)TURB Turbine Drive Supply 涡轮驱动供气Purge System Maintenance净化系统维护- Purge System Diagnostics净化系统诊断- Purge System Testing andCalibration净化系统测试和校准- Purge Cycle Troubleshooting净化循环排错•Color Changer Assembly换色器组件- Color Changer Valve Maintenance换色阀门维护•SolvAir Module Setup and Maintenance 溶剂空气模块设置和维护•3 Valve IK Gear Pump3阀门1K齿轮泵- Pump Block Pressure Sensor泵的压力传感器•Process Control Maintenance工艺控制维护- Fluid Presets Maintenance流体预设值维护- E-stat Presets Maintenance静电预设值维护- Preset Override Maintenance强制预设值维护- Color Change Maintenance换色维护•Pepperl & Fuchs ISB SettingsPepperl & Fuchs ISB设置•Robot Software Maintenance机器人软件维护- I/O Re-configurationI/O 重新配置- Robot File Copy机器人文件复制- Robot System Variables Editing Transducer Operations比例阀的操作- Shaping Air Control成形空气的控制- D/Q Shaping Air Control ModuleD/Q 成形空气控制模块- Turbine Speed Control涡轮速度控制- Keyence Digital Fiber SensorKeyence 数字光线传感器•Fluid Calibration - Beaker Method流体校准–量杯的方法•System Configuration Maintenance系统配置维护- System Colors Maintenance系统颜色维护- Styles Maintenance车型维护- Option Maintenance选项维护- PW3 SetupPW3 设置机器人系统变量编辑- Software Archive软件存档- Backup a Robot Image备份一个机器人镜像- Restore a Robot Image恢复一个机器人镜像•Paintworks III Software MaintenancePaintworks III软件维护- Creating a Norton Ghost 2003Boot Disk Set创建一个Norton Ghost2003 启动盘- Backing Up Your PAINTworks IIIGUI备份你的PAINTworksIII GUI。
机器人专业英语词汇学习 2.1

66
20 boolean(布尔型) 67
21
bracket(支架)
68
22 brake(制动器,闸) 69
23
button(按钮)
70
24 cabinet(机箱,柜子) 71
25
cable(线缆)
72
26 calculate(计算) 73
27 calibration(标定,校准) 74
28 cartesian(笛卡尔) 75
207
TRUE(真)
208
unit(部件)
209
unload(卸载)
210
upper(较高的)
211
value(数值)
212 variable(变量)
213
via(导通孔)
214
vision(视觉)
215 visual(视觉的)
216
voltage(电压)
217
warning(警告)
218 warranty(保证,授权)
161
receive(接收)
118
metal(金属)
162 reference(参考)
119
method(方法)
163 relative(相对的)
120 minimum(最小值) 164
relay(继电器)
121
mode(代码)
165
release(释放)
122
module(模块)
166 remove(除去,拆卸)
10 arm(手臂,装备) 57
11
array(数组)
58
12
attach(附加)
59
13 automatic(自动的) 60
机器人领域用语集
索引分類:[一般]:ロボットの種類,ロボットシステム,安全,その他[メカ]:ロボットの型,機構,機械要素、ハンド,グリッパ[駆動]:アクチュエータ,制御要素,動力源[移動]:移動ロボット,移動ロボットの運動学・力学[数学][運動]:質点の運動,剛体の並進運動・回転運動,ロボット動作[力学]:静力学,動力学[制御]:制御理論,制御要素[情報]:計算機のハード・ソフト,計算技術,データ処理,人工知能[センサ]:画像を除くセンサ,センサによる計測法[画像]:視覚センサ,画像処理,画像認識[音]:音声,音声認識,音声合成[応用]:ロボットの利用[A]・abduction[知能]:アブダクション,仮説生成・acceleration[運動]:加速度・acceleration motor[数学・運動]:(モータ代数の)加速度モータ・accelerometer[センサ]:加速度計・AC servomotor[駆動]:ACサーボモータ・active joint[メカ]:能動関節・acoustic analysis[音]:音響分析・active sensing[センサ]:アクティブ(能動)センシング・adaptive control[制御]:適応制御・Adept cycle[運動・応用]:アデプトサイクル・advanced teleoperator[制御]:知的遠隔操作(作業)システム・affine space[数学]:アフィン空間・affine transformation[数学]:アフィン変換・agricultural robot[応用]:農業ロボット・ample, trot, pace, center, traverse gallop, rotary gallop, bound(bounce), bronk[移動]・amusement robot[応用]:アミューズメントロボット・analysis-by-synthesis[音・情報]:合成による分析・android[一般]:アンデロイド・angular momentum[力学]:角運動量・angular displacement[運動]:角変位・angular velocity[運動]:角速度・angular acceleration[運動]:角加速度・ankle joint[移動]:かかと関節・anthropomorphic[一般]:人間型・approach vector[運動]:接近ベクトル・arc interpolation[運動]:円弧補間・arm[メカ]:アーム・articulated robot[メカ]:多関節ロボット・articulation sensor[センサ]:関節覚センサ・artificial constraint[運動]:人工的拘束・artificial intelligence[知能]:人工知能・aspect ratio[画像]:円形度・assembled battery[駆動]:組電池・assembly robot[応用]:組立ロボット・asymptotic stability[制御]:漸近安定・attack angle[移動]:迎え角・attitude control[移動]:姿勢制御・automated guided vehicle(AGV)[移動]:自動誘導車両・automatic control[制御]:自動制御・automatic regulation[制御]:自動調整・automaton[一般]:オートマトン・autoregressive moving average[情報]:自己回帰移動平均・availability[一般]:(安全)アベイラビリティ・azimuth meter[センサ]:方位角センサ[B]・backlash[メカ]:バックラッシュ・ball screw[メカ]:ボールねじ・Banach space[数学]:バナッハ空間:・bang-bang control[制御]:バンバン制御・base coordinate system[運動]:ベース座標系・battery[駆動]:バッテリ,電池・behavior-based control[制御]:ビヘイビアベースドコントロール:・bilateral operation[制御]:バイラテラル(双方向)操作・bilateral servo[制御]:バイラテラルサーボ・bi-linear interpolation method[数学・画像]:双線形補間法・binarization[情報]:2値化・binocular stereo vision[画像]:両眼視・binocular parallax, binocular disparity[画像]:両眼視差・bin-picking task[応用・運動]:ビンピッキング作業・biped locomotion robot[移動]:2足歩行ロボット・biped locomotion[移動]:2足歩行・block diagram[制御]:ブロック線図・Bode diagram[制御]:ボード線図・boundary model[情報]:・boundary element method[情報]:境界領域法・braquiation[運動]:ブラキエーション,鉄棒動作・brushless DC servomotor[駆動]:ブラシレスDCサーボモータ[C]・calibration[センサ]:較正・Cartesian coordinate robot[メカ]:直角座標ロボット・Cartesian space[数学]:直角座標空間・CCD camera[画像]:CCDカメラ・central moment[画像]:重心まわりのモーメント・centrifugal acceleration[運動]:遠心加速度・centripetal acceleration[運動]:求心加速度・centrifugal force[力学]:遠心力・centripetal force[力学]:求心力・cepstrum[情報]:ケプストラム・cepstrum coefficiency[情報]:線形予測ケプストラム係数・characteristic equation[制御]:特性方程式・characteristic root[制御]:特性根・chattering[制御]:チャッタ・circular gait[移動]:旋回歩容・clean room robot[応用]:クリーンルームロボット・closed form equation[数学]:閉じた形の方程式・clothoid curve[数学・移動]:クロソイド曲線・coarticulation[音]:調音結合・cogging torque[駆動]:トルク脈動・column[数学]:(行列の)列・collision avoidance[運動・制御]:衝突回避・compensator[制御]:補償器・compliance[力学]:コンプライアンス・compliance control[制御]:コンプライアンス制御・compliant motion[運動・制御]:コンプライアント運動・computer vision[画像]:コンピュータビジョン・configuration obstacle[運動]:コンフィギュレーション障害物・configuration space[運動]:コンフィギュレーション空間・connected word recognizer[音]:連続単語認識・connectivity[メカ・運動]:(指の)連結度・conservative force[力学]:保存力・constraint[数学・運動]:拘束・construction robot[応用]:建設ロボット・constructive model[情報]:コンスツラクティブモデル・control[制御]:制御・controllable[制御]:可制御・controlled variable[制御]:制御量・control variable[制御]:制御変数・convergence[画像]:輻輳・conversation recognition[音]:会話理解・convex hull[数学]:凸多角形の辺・cooperative control[制御]:協調制御・coordinated control[制御]:協調制御・coordinate system[運動]:座標系・coordinate transformation[数学]:座標変換・Coriolis' acceleration[運動]:コリオリの加速度・corner cube[センサ]:コーナキューブ・Coulomb friction[力学]:クーロン摩擦・couple[力学]:偶力・coupling force, moment[力学]:カップリング力,カップリングモーメント・Coriolis' acceleration[運動]:コリオリの加速度・Coriolis' force[力学]:コリオリの力・CP control[制御]:CP制御・crab gait[移動]:側行歩容・crab angle[移動]:側行角・crawl gait, quadruped crawl gait[移動]:クロール歩容・crawler, tracked vehicle[移動]:クローラ型移動機構・crawler belt[移動]:履帯・creep gait[移動]:クリープ歩容・cross product[数学]: = vector product・cruise[移動]:巡航・current control[制御]:電流制御・cylindrical coordinate robot[メカ]:円筒座標ロボット[D]・data driven system[情報]:データ駆動システム・DC servomotor[駆動]:直流サーボモータ・DD motor[駆動]:DDモータ,ダイレクトドライブモータ・dead beat performance[制御]:デッドビート動作・deadlock[移動]:行き詰まり,デッドロック・dead reckoning[移動]:デッドレコニング・decomposition model[情報]:デコンポジションモデル・deduction[情報]:演繹・degenerate[数学・運動]:縮退・degree of freedom[運動]:自由度・degree of freedom of mechanism[機構]:機構の自由度・demisyllable[音]:半音節・Denavit-Hartenberg's transformation matrix[数学・運動]:Denavit-Hartenbergの変換行列・density[画像]:濃度・departure angle[移動]:背離角・detector[センサ]:検出器・detent torque[駆動]:デテントトルク・determinant[数学]:行列式・diagonal matrix[数学]:対角行列・diagonalization[数学]:対角変換,対角化・dimensionless foot position[移動]:無次元化足位置・dimensionless initial foot position[移動]:無次元化初期足位置・dimensionless longitudinal stability margin[移動]:無次元化縦安定余裕・direct drive[メカ]:直接駆動方式・direct drive robot[メカ]:DDロボット,ダイレクトドライブロボット・direct dynamics[力学]:順動力学・direct feedback system[制御]直接フィードバック系・direct kinematics[運動]:順運動学・direct teach[応用]:直接教示・disaster preventive robot[応用]:防災ロボット・discrete data system[制御]:離散値系・discrete Fourier transform[情報]:離散的フーリエ変換・discriminant function[画像]:・disparity[画像]:視差・displacement[運動]:変位・disturbance[制御]:外乱・distributed control[制御]:分散制御・domestic robot[応用]:家庭用ロボット・double support phase[移動]:両脚支持期・dry friction[力学]:乾性摩擦・dual number[数学]:デュアル数,2元数・dual vector[数学]:デュアルベクトル,2元ベクトル・duty factor[移動]:デューティ比・dynamic thresholding[情報]:動的2値化・dynamic control(computed torque method)[制御]:動的制御・dynamic manipulability index[力学]:動的可操作度・dynamic parameter[力学]:動力学パラメータ・dynamics[力学]:動力学・dynamic time warping algorithm[音]:時間正規化マッチング法,DPマッチング法[E]・edge preserving smoothing filter[画像]:エッジ保存するフィルタ・effector level[応用]:エフェクタレベル・effector sensor[センサ]:効果器センサ・eigenvalue[数学]:固有値・eigenvector[数学]:固有ベクトル・elbow[メカ]:肘・electrically-driven robot[メカ]:電動ロボット・electro-hydraulic motor[駆動]:電気・油圧サーボモータ・electro-hydraulic servo mechanism[制御]:電気油圧サーボ機構・electrostatic actuator[駆動]:静電アクチュエータ・encoder, incremental, absolute[センサ]:エンコーダ・endeffector[メカ]:エンドエフェクタ,(末端)効果器・endeffector coordinate system[運動]:エンドエフェクタ座標系,ハンド座標系・endless track[移動]:無限履帯・epipolar line[画像]:エピポーラ線・epipolar plane image[画像]:エピポーラ面画像・equilibrium point[制御]:平衡点・Euclid space:ユークリッド空間・Euler equation[力学]:オイラーの式・Eulerean angles[運動]:オイラー角・event driven system[情報]:事象駆動システム・expert system[知能]:エキスパートシステム・extended Gaussian image[画像]:拡張ガウス像表現・external sensor[センサ]外界センサ[F]・failure[一般]:故障・failure intensity[一般]:故障強度・failure mode[一般]:故障モード・failure mode and effect analysis[一般]:故障モード影響解析・failure rate[一般]:故障率・fail safe[一般]:フェールセーフ・fault tolerance[一般]:フォールトトレランス・fault tree analysis[一般]:故障木解析・fault[一般]:欠陥・fault detection[一般]:故障検出・fault avoidance[一般]:故障排除・fault diagnosis[一般]:故障診断・fault dictionary[一般]:故障辞書・feedback control[制御]:フィードバック制御・feedforward control[制御]:フィードフォワード制御・feeding method[駆動]:給電方式・field robot[応用]:圃場ロボット・findpath problem[運動]:経路探索問題・finger[メカ]:指・fingersurface[メカ]:指の腹・finite element method[情報]:有限要素法・first-order system[制御]:1次遅れ系・flexible arm[メカ]:柔軟アーム,フレキシブルアーム・follow-the leader[移動]:前脚追従・follow-up control[制御]:追従制御・foothold[移動]:足場・foot[移動]:足・force feedback bilateral servo system[制御]:力帰還型バイラテラルサーボ系・force sensor:力覚センサ・force steering[制御]:力ステアリング・forearm[メカ]:前腕・forestry robot[応用]:林業ロボット・formant frequency[音]:ホルンマント周波数・four-bar linkage mechanism[機構]:4節リンク機構・Fourier analysis[情報]:フーリエ解析・Fourier transform[数学・計算]:フーリエ変換・free gait[移動]:適応歩容・free space[運動]:自由空間・frequency characteristics[運動・制御]:周波数特性・frequency response[運動・制御]:周波数応答・frequency spectrum[情報]:周波数スペクトル・friction coefficient[力学]:摩擦係数・friction angle[力学]:摩擦角・friction cone[力学]:摩擦円錐・fluid friction[力学]:流体摩擦・force[力学]:力・fundamental frequency contour, F0 contour[音・情報]:基本周波数パターン[G]・gantry type robot[メカ]:ガントリ型ロボット,門型ロボット・gas rate gyroscope[センサ]:ガスレートジャイロ・Gaussian[数学]:ガウシアン・gear, spur gear, helical gear, bevel gear, worm gear[メカ]:歯車,平歯車,はすば歯車,かさ歯車,ウオームギヤ・gearless differential speed reducer[メカ]:ボール減速機・general inertia ellipsoid(GIE)[運動]:一般化慣性楕円体・generalized coordinate[数学・運動]:一般座標,広義座標・generalized bilateral control[制御]:一般化バイラテラル制御・generalized cylinder[数学]:一般円筒表現・generalized force[数学・力学]:一般力,広義の力・generalized information feedback[制御]:一般化情報フィードバック・geomagnetic sensor[センサ]:地磁気センサ・geometric configuration of robot[メカ]:ロボットの構造・geometric model, world model[運動]:幾何モデル,ワールドモデル・geometric parameter[運動]:幾何学パラメータ・global path planning[移動]:大域的経路計画・goniometer[センサ]=articulation sensor・grasping force[力学]:把握力・grasping mechanism, gripper[メカ]:グリッパ・ground contact area[移動]:接地面積・ground pressure[移動]:接地圧・group control[制御]:群管理制御・guarded motion[運動・制御]:近接非接触運動・gyroscope[センサ]:ジャイロスコープ,ジャイロ・gyroscopic moment[力学]:ジャイロモーメント[H]・hand, mechanical hand[メカ]:ハンド・hand-eye system[画像・制御]:ハンドアイシステム・half-step drive[駆動]:1-2相励磁駆動・harmonic drive gearing[メカ]:ハーモニックドライブ(減速機)・healthcare robot[応用]:医療サービスロボット・hexapod walking machine(robot),six-legged walking machine(robot)[移動]:6脚(6足)ロボット・hidden Markov model[情報]:隠れマルコフモデル・hierarchy control[制御]:階層制御・high rate discharge[駆動]:高率放電・H∞control[制御]:H∞制御・hip joint[移動]:腰関節・hobby robot[応用]ホビーロボット・holonomic constraint[数学・運動]:ホロノームな拘束・homogeneous coordinate system[数学]:同次座標系・homogeneous transformation(matrix)[数学・運動]:同次変換,同次変換行列(座標変換行列)・hopping robot[移動]:跳躍ロボット,ホッピングロボット・Hough transformation[数学・画像]:ハフ変換・hybrid controller[制御]:ハイブリッド制御器・hybrid position-force control[制御]・hydraulic actuator[駆動]:油圧アクチュエータ・hydraulically-driven robot[メカ]:油圧駆動ロボット[I]・ideal legged locomotion machine[移動]:理想脚移動機械・image recognition[画像]:画像認識・image understanding[画像]:画像理解・image memory[画像]画像メモリ・impedance control[制御]:インピーダンス制御・impulse response[制御]:インパルス応答・inclination sensor[センサ]:傾斜角センサ・indefinite[数学]:(2次形式・正方行列の)非定・indirect drive[メカ]:間接駆動方式・indirect teach[応用]:間接教示・indicial response[制御]:インデシャル応答・induction[情報]:帰納・industrial robot[一般]:産業用ロボット・inertia force[力学]:慣性力・inertia matrix[力学]:慣性行列・inertia tensor[力学]:慣性テンソル,慣性行列・inertia torque(inertial resistance moment)[力学]:慣性トルク(慣性抵抗モーメント)・inertial navigation system[移動・制御]:慣性航法システム・inference[情報]:推論・initialize[応用]:原点合わせ・inner product[数学]:内積:・inspection robot[応用]:検査ロボット・intelligent sensor[センサ]:知能センサ・intelligent remote operation[制御]:知的遠隔操作・intelligent robot[一般]:知能ロボット・internal sensor[センサ]内界センサ・intensity[画像]:明るさ・inverse coordinate transformation[運動]:逆座標変換・inverse dynamics[力学]:逆動力学・inverse kinematics[運動]:逆運動学・inverse matrix[数学]:逆行列・isolated word recognizer[音]:離散単語認識・isomorphic kinematical chain[メカ]:同形機構(連鎖)・isotropic rolling robot[移動]:均質転がり移動ロボット[J]・Jacobian[数学]:ヤコビアン,ヤコビ・jaw[ハンド]:爪・jerk[運動]:ジャーク,加加速度・joint[メカ]:ジョイント,関節・joint displacement vector[運動]:関節変位ベクトル・joint servo[制御]:関節サーボ・joint space[運動]:関節空間・joint torque vector[力学]:関節トルクベクトル・Jordan form, Jordan matrix[数学]:ジョルダン形式,ジョルダン行列・joystick[応用]:ジョイスティック[K]・Karman filter[センサ・情報]:カルマンフィルタ・kinematical analysis[運動]:運動(学的)解析・kinematical gait formula[移動]:運動学的歩容式・kinetic friction[力学]:動摩擦(力)・kinetic energy[力学]:運動エネルギー・knee joint[移動]:膝関節[L]・Lagrange equation[力学]:ラグランジュの(運動方程)式・Lagrangian formulation[力学]:ラグランジュ法による定式化・Lagrangian method[力学]:ラグランジュ法・Laplace transform[数学・制御]:ラプラス変換・Laplacian[数学・画像]:ラプラシアン・landmark[移動]:ランドマーク・laser radar[センサ]:レーザレーダ・lateral plane, frontal plane[移動]:前頭面・learning[情報]:学習・learning control[制御]:学習制御・leg phase[移動]:脚相・legged robot, walking robot, walking machine[移動]:脚式ロボット,歩行ロボット・lifted phase[移動]:= swinging phase・lifting[移動]:(脚ロボットの)離陸・line drawing[画像]:線画:・linear programming[情報]:線形計画法・linear encoder, rotary encoder[センサ]:直動エンコーダ,回転エンコーダ・linear interpolation[運動・応用]:直線補間・linear predictive analysis, linear predictive coding[情報]:線形予測分析法・linear predictive coefficients[情報]:線形予測係数・linear mapping[数学]:線形写像・linear motion guide[メカ]:直動案内装置・linearly dependent[数学]:線形従属・linearly independent[数学]:線形独立・linearization[数学・制御]:線形化・link[メカ]:リンク・link coordinate system[運動]:リンク座標系・link parameter[メカ・運動]:リンクパラメータ・locomotion mechanism[移動]:= mobile mechanism・longitudinal stability margin[移動]:縦安定余裕・low rate discharge[駆動]:低率放電・Lyapunov first method[制御]:リアプノフの第1の方法・Lyapunov function[制御]:リアプノフ関数・Lyapunov second method[制御]:リアプノフの第2の方法[M]・machine vision[画像]:マシンビジョン・mechanism [メカ]:機構,メカニズム・machine element[メカ]:機械要素・magnetic encoder[センサ]:磁気式エンコーダ・maintainability[一般]:保全性・manipulator[一般]:マニピュレータ・man-machine interface[一般]:マン・マシンインタフェイス・manipulability[運動]:可操作性,可操作度・manual control[制御]:手動制御・manual manipulator[一般]:マニュアルマニピュレータ・mapping[数学]:写像・master-slave[制御]:マスタスレーブ・master-slave manipulator[一般・応用:マスタ・スレーブマニピュレータ・matching[画像]:マッチング,照合・matrix[数学]:行列・mean time to failure(MTTF)[一般]:平均故障寿命・mean time between failure(MTBF)[一般]:平均故障間隔・mean time to repair(MTTR)[一般]:平均修復時間・measurement robot[応用]:測定ロボット・mechanical gripper[メカ]:(メカニカル)グリッパ・mechanical hand[メカ]:(メカニカル)ハンド・mechano-chemical actuator[駆動]:メカノケミカルアクチュエータ(人工筋)・medical robot[応用]:医用ロボット・MEMS(electro-mechanical system):MEMS,マイクロ電子機械システム,マイクロメカトロニクス・micromechanism[メカ]マイクロメカニズム・micromouse[応用]:マイクロマウス・military robot[応用]:軍事ロボット・MIMD[情報]:MIMD,複数命令複数データ流・MISD[情報]:MIMD,複数命令単一データ流・mobile robot,[移動]:移動ロボット・mobile mechanism[移動]:移動機構・mobility[運動]:(指の)可動度・model-based vision system[画像]:モデルに基づく視覚システム・model referenced adaptive control(MRAC)[制御]:モデル規範型適応制御・Moire topography[センサ・画像]:モアレ法・moment[画像]:(図形の)モーメント・moment[力学]:モーメント(モーメントベクトル)・moment of inertia[力学]:慣性モーメント・momentum[力学]:運動量・Moore-Penrose inverse matrix[数学]:ムーア・ペンローズ逆行列・motion description[運動・応用]:動作記述・motion range[運動]:運動範囲・motion stereo[画像]:移動ステレオ・motor[運動・力学]:(電動)モータ・motor[数学]:(モータ代数の)モータ・motor algebra[数学]:モータ代数・motor constant[メカ]:モータ定数・moving coordinate system[運動]:移動座標系・movement parallax[画像]:運動視差・moving platform[移動]:移動搬送車・multibody system[運動]:多体系・multi-legged robot[移動]:多脚ロボット,多足ロボット・multi-train epicycloidal reduction gear[メカ]:RV減速機[N]・natural constraint[運動]:自然拘束・navigation[移動]:航行制御,ナビゲーション・nearest neighbor method[数学]:最近傍法・negative definite[数学]:(2次形式・行列の)負定・negative semidefinite[数学]:(2次形式・行列の)半負定,準負定,非定・Newton equation[力学]:ニュートンの式・Newton-Euler equation[力学]:ニュートンオイラーの式・Newton-Euler method[力学]:ニュートンオイラー法・Newton-Raphson method[数学]:ニュートン-ラプソン法.・non-holonomic constraint[数学・運動]:非ホロノームな拘束・nonlinear programming[情報]:非線形計画法・nonparametric impulse response[制御]:パラメータ表示でないインパルス応答・norm[数学]:ノルム・normalized texture property map[画像]:正規化テクスチャ属性マップ・normal vector[数学]:法線ベクトル・nuclear robot, robot for nuclear power plant[応用]:原子力ロボット・null space[数学]:ナル空間・nursery robot[応用]:種苗生産ロボット・nursery robot, patient care robot[応用]看護ロボット・null space[数学]:ゼロ化空間・number synthesis[機構]:数総合・Nyquist criteria[制御]:ナイキストの安定判別・Nyquist diagram[制御]:ナイキスト線図[O]・objective function(performance index)[制御]:目的関数・object level[応用]:対象物レベル・object-oriented language[情報]:オブジェクト指向言語・observer[制御]:オブザーバ・observable[制御]:可観測・occlusion[画像]:オクルージョン,遮蔽・occluding contour[画像]:遮蔽輪郭線・off-line teach[応用]:オフライン教示・off-line simulation[情報・応用]:・offset[メカ]:オフセット・offshore robot[応用]:= underwater robot・omnidirectional vehicle(ODV)[移動]:全方向車・on-line simulation[情報・応用]:・open-loop kinematical chain[メカ]:開ループ運動連鎖・open-loop transfer function[制御]:開ループ伝達関数(一巡伝達関数)・operating robot[一般]:操縦ロボット・optical flow[画像]:オプチカルフロー・optimal control[制御]:最適制御・optical encoder[センサ]:光学式エンコーダ・optical gyroscope[センサ]:光学式ジャイロ・orientation[運動]:姿勢・orientation transformation matrix[数学・運動]:姿勢変換行列・orientation vector[運動]:姿勢ベクトル,方向ベクトル・orthogonal[数学]:直交・orthogonal basis[数学]:正規直交基底・orthogonal transformation:直交変換・orthogonal matrix[数学]:直交行列・output equation[制御]:出力方程式[P]・painting robot[応用]:塗装ロボット・pair[メカ]:対偶・palletizing task[運動]:パレタイジング作業・palm[メカ]:掌・parallel bilateral servo system[制御]:並列型バイラテラルサーボ系・parallel link(pantograph)[メカ]:平行クランク,パンタグラフ・parallel link manipulator[機構]:並列リンク式マニピュレータ・parallel processing[センサ・計算]:並列処理・parameter identification[機構・制御]:パラメータ同定・passive joint[機構]:受動関節・passive navigation[制御]:・path[運動]:経路・pattern recognition[情報・画像]:パターン認識・peg-in-hole task[応用・運動]:ペグインホール作業,ピン挿入作業・perturbation method[数学・制御]:摂動法・phone[音]:単音・phoneme[音]:音素・photometric system[センサ]:光学的計測法・photometric stereo[画像]:ホトメトリックステレオ・pick-and-place task[応用・運動]:ピックアンドプレース作業・PID compensation[制御]:PID補償・PID control[制御]:PID制御・piezo actuator[駆動]:ピエゾアクチュエータ・pixel[画像]:ピクセル,画素:・planetary gear reduction[メカ]:遊星歯車装置・planetary roller screw[メカ]:遊星ローラねじ機構・planning[知能]:プラニング,計画・placing[移動]:(脚ロボットの)接地・playback robot[一般]:プレイバックロボット・pneumatically-driven robot[駆動]:空気圧駆動ロボット・pneumatic actuator[駆動]:空気圧アクチュエータ・pneumatic gripper[メカ]:空気圧グリッパ・polar coordinate robot[メカ]:極座標ロボット・pole assignment[制御]:極配置・pose[運動]:ポーズ・position[運動]:位置・positive definite[数学]:(2次形式・行列の)正定・positive semidefinite[数学]:(2次形式・行列の)半正定,準正定,非負定・position[運動]:位置・posture transformation gait[移動]:踏み換え歩容・potential energy[力学]:保存エネルギー・potential field method[制御・移動]:ポテンシアル場法・potentiometer[センサ]:ポテンシオメータ・power manipulation[運動]:・power rate[駆動]:パワーレート・power source[駆動]:動力源・precession[運動・力学]:歳差運動・predictive maintenance[一般]:予防保全・pressure sensor[センサ]:圧覚センサ・primary battery[駆動]:一次電池・principal axes of inertia[力学]:慣性主軸・principal axis transformation[数学]:主軸変換・principle of virtual work[力学]:仮想仕事の原理・prismatic joint[メカ]:直動関節・problem solving[情報]:問題解決・process control[制御]:プロセス制御・products of inertia[力学]:慣性乗積・program control[制御]:プログラム制御・programmable controller[制御]:プログラマブルコントローラ・projection, projective transformation[数学]:射影,射影変換・projective matrix[数学]:射影行列:・prosodic features[音]:韻律的特徴・prosthesis[応用]:義手,義足・protocol[情報]:プロトコル,通信規約・proximity sensor[センサ]:近接覚センサ・pruning robot[応用]:枝打ちロボット・PSD(position sensitive device)[画像]:PSD、半導体位置検出素子・pseudo inverse matrix[数学]:疑似逆行列・pseudo-vector[数学]:疑似ベクトル・PTP control[制御]:PTP制御・PTP control[制御]:PTP制御・pull-in torque characteristics[駆動]:引き込みトルク特性・pull-out torque characteristics[駆動]:脱出特性・PWM[駆動]:パルス幅変調・PZT[駆動]:PZT,圧電素子[Q]・quadratic form[数学]:2次形式・quadratic programming[情報]:2次計画法・quadruped walking machine(robot), four-legged walking machine(robot)[移動]:4脚(4足)ロボット・quasi-dynamic walk[移動]:準動歩行[R]・rank[数学]:ランク,階数・range sensor[センサ]:距離センサ・rate control[制御]:速度制御・rate integration[センサ]:積分ジャイロ・ray tracing algorithm[画像]:光線追跡法・reaction force, reaction moment[力学]:反作用力,反作用モーメント・reasoning[情報]:推論・recursive computation[数学]:反復計算・reduction ratio[メカ]:減速比・redundant degree of freedom[運動]:冗長自由度・redundancy[運動]:冗長性・reference[制御]:目標値・reference coordinate system[運動]:基準座標系・reflectance mapping[画像]:反射率マップ・region growing[情報]:領域拡張・regular[数学]:正則・regular gait[移動]:レギュラー歩容・rehabilitation robot[応用]:リハビリ用ロボット・relative motion[運動]:相対運動・relative displacement[運動]:相対変位・relative velocity[運動]:相対速度・relative acceleration[運動]:相対加速度・reliability[一般]:信頼性・reliability design[一般]:信頼性設計・reliability block diagram[一般]:信頼性ブロック図・remote manipulator[一般]:遠隔操作マニピュレータ・remote teach[応用]:遠隔教示・rescue robot[応用]:(災害)救助ロボット・resolved motion rate control[制御]:分解速度制御・resolved acceleration control[制御]:分解加速度制御.・resolver[センサ]:レゾルバー・revolute joint, rotational joint[メカ]:ジョイント,回転関節・rigid body[運動・力学]:剛体・ring laser gyroscope[センサ]:リングレーザジャイロ・robot[一般]:ロボット・robot controller[制御]:ロボットコントローラ・robot for disabled[応用]:身障者介助ロボット・robot for hazardous environment[応用]:極限作業ロボット・robot for high voltage line operation[応用]:高圧線工事ロボット・robot for disaster prevention[応用]= disaster preventive robot・robot language[応用]:ロボット言語・robot vision[画像]:ロボットビジョン・robust[制御]:ロバストな・robust control[制御]:ロバスト制御・roller chain[メカ]:ローラチェイン・roll-pitch-yaw angles[運動]:ロールピッチヨー角・rotary joint, slide joint[メカ]:回転関節,直動関節・rotation[運動]:回転・rotational transformation[数学・運動]:回転行列・rough terrain[移動]:荒れ地・row[数学]:(行列の)行[S]・sagittal plane[移動]:矢状面・salt-and-pepper noise[情報]:胡麻塩雑音・sampled-data control, sampling control[制御]:サンプル値制御・scalar[数学]:スカラ・SCARA robot[メカ]:スカラロボット・scavenger robot, cleaning robot[応用]:清掃ロボット・scene[画像]:シーン,情景・scene analysis[画像]:情景解析:・screw-nut system[メカ]:ねじ送り装置・screw space[数学・運動]:スクリュー空間・search[情報]:探索・secondary battery[駆動]:2次電池・2nd-order system[制御]:2次遅れ系・security robot[応用]:保安ロボット,警備ロボット・segmental features[音]:文節的特徴・self-tuning adaptive control[制御]:自己チューニング適応制御・sensor[センサ]:センサ・sensor; optical -, mechanical -, resistance -, semiconductor -, electrostatic -, capacitance -, hydraulic -, bio-, magnetic -,liquid -[センサ]:光学式,機械式,(電気)抵抗式,半導体,静電,静電容量式.流体,生体,磁気式,液体,各センサ・sensor fusion[センサ]:センサ融合・sensory control[制御]:センサ制御・sensor coordinate system[運動]:センサ座標系・sensor feedback control[制御]:センサフィードバック制御・sensor feedback robot[一般]:センサフィードバックロボット・sensory control[制御]:感覚制御,センサ制御・sensor-based control[制御]:センサベースドコントロール・sequential control[制御]:シーケンス制御,逐次制御・servomechanism[制御]:サーボ機構・sequential control[制御]:シーケンス制御・serial link manipulator[メカ]:直列リンク式マニピュレータ・service robot[応用]:サービスロボット・servovalve[駆動]:サーボバルブ・set-up control[制御]:定値制御・shading[視覚]:シェーディング・shading model[画像]:陰影モデル・shape from shading[画像]:・shape from texture[画像]:・shape recognition[画像]:形状認識・shoulder[メカ]:肩・side-step[移動]:横行・SIMD[情報]:SIMD,単一命令複数データ流:・simulation[応用]:シミュレーション・single support phase[移動]:単脚支持期・singular point[数学・運動]:特異点・singular value[数学]:特異値・singular value decomposition[数学・運動]:特異値分解.・SISD[情報]:SIMD,単一命令単一データ流:・slewing characteristics[駆動]:連続特性・slide joint:[メカ]= prismatic joint・sliding mode control[制御]:スライディングモード制御・slip sensor:滑り覚センサ・SMA(shape memory alloy)[駆動]:形状記憶合金・SM,IM,VR,AC servomotor[駆動]:・smart sensor[センサ]:スマートセンサ,知能センサ・smell sensor[センサ]:においセンサ・soft gripper[メカ]:ソフトグリッパ・software servo[制御]:ソフトウェアサーボ・sole[移動]:足底・solid friction[力学]:固体摩擦・solid model[画像]:ソリッドモデル・solid modeler[画像]:ソリッドモデラ・space robot[応用]:宇宙ロボット・spatial filter[画像・情報]:空間フィルタ・speaker dependent, talker dependent[音]:特定話者用・speaker independent, talker independent[音]:不特定話者用・specific resistance[移動]:移動仕事率・speech recognition[音]:音声認識・speech synthesis[音]:音声合成・speech synthesis by rule[音]:規則音声合成方式・speech synthesis from concept[音]:概念からの音声合成・speech synthesizer[音]:音声合成装置・speech recognition[音]:音声認識・spectrum[情報]:スペクトル・spherical joint[メカ]:球面関節・spillover[制御]:スピルオーバ・spline curve[数学]:スプライン曲線・sprocket[メカ]:スプロケット・stability in the sense of Lyapunov[制御]:リアプノフの意味の安定・stability margin[移動]:安定余裕・stair-climbing[移動]:階段登降・stair-climbing robot[移動]:階段昇降ロボット・standing posture transformation gait[移動]:静止踏み換え歩容・standard gait[移動]:基準歩容・starting torque characteristics[駆動]:起動トルク特性・state equation[制御]:状態関数,状態方程式・state transition matrix[制御]:状態遷移行列・state transition equation[制御]:状態遷移方程式・state variable[制御]:状態変数・statics[力学]:静力学・static friction[力学]:静摩擦(力)・steady state velocity error[制御]:定常速度偏差・steady state response[制御]:定常状態・step response[制御]:ステップ応答・static walk[移動]:静歩行・statically stable[移動]:静的安定・statistical pattern recognition[画像]:統計的パターン認識・steering[移動]:ステアリング,舵取り・step motor(stepping motor)[駆動]:ステップモータ,パルスモータ・step motor; VR -, PM -, hybrid -, [駆動]:可変リラクタンス,永久磁石型,ハイブリッド型ステップモータ・stepping rate[駆動]:パルスレート・stereo[画像]:立体視・stiffness control[制御]:スティフネス制御・strain gauge[センサ]:歪みゲージ・stride[移動]:ストライド・stride length[移動]:ストライド幅・structure from motion:・structural pattern recognition[画像]:構造的パターン認識・subsea robot[応用]:= underwater robot・supervisory control[制御]:管理制御・supporting phase[移動]:支持相,立脚相・support polygon[移動]:支持多角形・surface model[画像]:サーフィスモデル・swept volume[運動]:可動空間体積・swing, tilt, pan[センサ・メカ]:スイング,ティルト,パン(3軸傾き角)・swinging phase[移動]:(歩行)遊脚相・syllable[音]:音節・syntactically controlled DP matching[情報]:オートマトン制御DPマチング法・symmetric bilateral servo system[制御]:対称型バイラテラルサーボ系・symmetric gait[移動]:対称歩容・system configuration of robot[一般]:ロボットシステムの構成[T]・tachometer generator「センサ]:タコメータ(タコジェネ)・tactile control[センサ]:触覚制御・tactile recognition[センサ]:触覚認識・tactile sensor[センサ]:接触覚センサ・task coordinates servo[制御]:作業空間サーボ・task coordinate system[運動]:作業座標系・task description[応用]:作業記述・task-level programming[運動・応用]:作業レベルの動作計画・task performability[運動]:作業性能・task planning[応用]:作業計画・task vector[運動]:作業ベクトル・taste sensor[センサ]:味センサ・teaching[応用]:教示,ティーチング・teaching playback[制御・応用]:教示再生方式・teleexistence[画像]:テレエグジステンス,遠隔臨場システム・teleoperating robot[一般・応用]:遠隔操縦ロボット・telepresence[画像]:= teleexistence・telerobot[制御]:テレロボット・template matching[画像]:テンプレートマッチング・tensor[数学]:テンソル・terminal analog[音]:ターミナルアナログ・text-to-speech conversion[音]:テキスト音声合成・text to speech synthesis[音]:テキスト音声合成・texture[画像]:テクスチャ・texture analysis[画像]:テクスチャ解析・threshold[センサ]:敷居値・thumb[メカ]:親指・time of flight method[センサ]:飛行時間測定法・time optimal control[制御]:最短時間制御・time to failure[一般]:故障寿命・time warping[計算]:時間軸圧縮・toothed belt(synchronous belt)[メカ]:歯付きベルト,タイミングベルト・torque tube[メカ]:トルクチューブ・touch sensor[センサ]:触覚センサ・trace[数学]:(行列の)トレース・tracking control[制御]:追値制御・trajectory[運動]:軌道・trajectory control[制御]:軌道制御・trajectory tracking[運動]:軌道追従・transfer function[制御]:伝達関数・transfer robot[応用]:搬送ロボット・transfer phase[移動]:= swinging phase・transient response[運動・制御]:過渡状態・translation[運動]:直動,直線運動・translational joint[メカ]:= prismatic joint・transmission element[メカ]:(運動)伝達要素・triangulation[センサ]:3角測量法・turn-in-place[移動]:その場旋回[U]・ultrared sensor[センサ]:赤外線センサ・ultrasonic motor[駆動]:超音波モータ・underactuated system[制御]:アンダーアクチュエーテッドシステム・underwater robot[応用]:海洋ロボット・unilateral servo[制御]:ユニラテラルサーボ・unilateral operation[制御]:ユニラテラル(1方向)操作・unit battery[駆動]:単位電池・universal hand[メカ]:万能ハンド・unmanned transfer vehicle[応用]:無人搬送車・unmanned carriage[応用]:無人台車・upper arm[メカ]:上腕[V]・vacuum chamber robot[応用]:真空環境ロボット・vanishing point[画像]:消失点・vanishing line[画像]:消失線・variable structure system[制御]:可変構造システム・variable structure control[制御]:可変構造制御・vector[数学]:ベクトル・vector product[数学]:外積・vector space[数学]:ベクトル空間・velocity[運動]:速度・velocity motor[数学・運動]:(モータ代数の)速度モータ・vibration control[制御]:振動制御・vibrometer[センサ]:振動計・vision sensor[画像]:視覚センサ・visual feedback[画像・制御]:視覚フィードバック・visual servo[画像・制御]:ビジュアルサーボ・vocoder[音]:ボコーダ・vocal tract analog[音]:声道アナログ[W]・wave gait[移動]:波動歩容(ウェーブ歩容)・welding robot[応用]:溶接ロボット・welfare robot[応用]:福祉ロボット・wheeled type mobile robot[移動]:車輪型移動機構・whisker sensor[センサ]:触角センサ・window[情報]:ウィンドー・wire, cable, chain, belt[メカ]:ワイヤ、ケーブル,チェイン,ベルト・wireframe model[画像・情報]:ワイヤフレームモデル・workspace[運動]:作業空間・world model[情報]:実世界モデル・word recognition system[音]:単語音声認識システム・wrench[力学]:レンチ・wrist[メカ]:手首,リスト[Z]・zero-cross method[センサ]:ゼロクロス法。
ABB机器人英文词汇 1
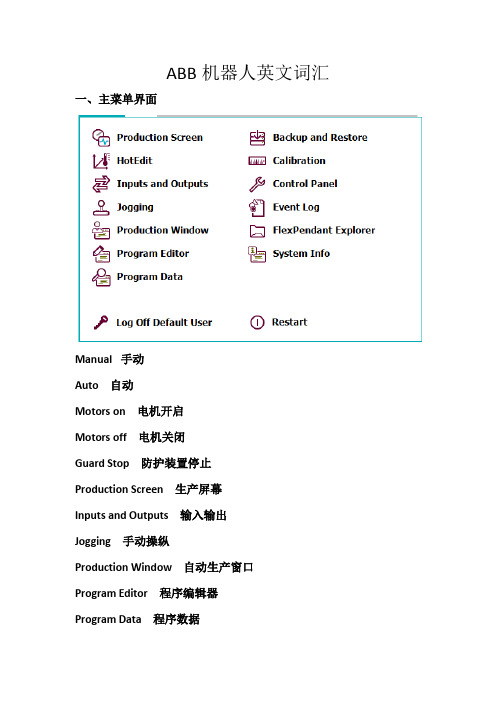
ABB机器人英文词汇一、主菜单界面Manual手动Auto 自动Motors on 电机开启Motors off 电机关闭Guard Stop 防护装置停止Production Screen 生产屏幕Inputs and Outputs 输入输出Jogging 手动操纵Production Window 自动生产窗口Program Editor 程序编辑器Program Data 程序数据Backup and Restore 备份与恢复Calibration 校准Control Panel 控制面板Event Log 事件日志FlexPendant Explorer FlexPendant资源管理器System Info 系统信息Log Off Default User 注销Default UserRestart 重新启动二、控制面板界面1、Appearance Customizes the display(外观自定义显示器)2、Supervision Motion Supervision and Execution Settings (监控动作监控和执行设置)3、FlexPendant Configures the FlexPendant system (FlexPendant 配置FlexPendant系统)4、I/O Configures Most Common I/O signals (I/O 配置常用I/O信号)5、Language Sets current language(语言设置当前语言)6、ProgKeys Configures programmable keys (ProgKeys 配置可编程按键)7、Controller Settings Sets Network,DateTime and ID (控制器设置设置网络、日期时间和ID)8、Diagnostics System Diagnostics(诊断系统诊断)9、Configuration Configures system parameters(配置配置系统参数)10、Touch Screen Calibrates the touch screen(触摸屏校准触摸屏)。
中英对照工业机器人
外文资料译文工业机器人早在机器人变为现实之前,机器人与机器人学这两个术语就已经提出来了。
1923年,随着捷克剧作家卡雷尔·查陪克的剧本R.U.R(罗苏姆的通用机器人)英文译本的问世,机器人这一术语就开始进入英语。
机器人robot一词源于捷克语,该词意指奴隶或劳工。
1942年,另一位作家艾萨克·埃思穆乌(他曾经撰写过许多有关机器人的短篇小说)在创立机器人学三个法则时就提出了机器人学这个专业术语。
他曾推断,机器人应该有特殊电路,使其始终遵循下述三个基本原则:(1)机器人不能伤害人类,也不能通过不执行指令而使人类受到伤害;(2)在不违背第一条法则的前提下,机器人必须遵从人类意志;(3)再不违背第一、二条法则的前提下,机器人必须保护自身不受伤害。
当时撰写的这些故事纯属科学幻想。
今天,随着机器人变为现实,分析这些机器人法则,从中获得很有价值的理念,可供机器人专家设计人控制系统时参考。
1.机器人的定义机器人是一种可重复编程的多功能操作器,其设计用途是输送物料、工件、刀具及一些特殊装置,通过各种程控运动来完成多种不同任务。
以上定义被普遍认可,其特点是:工业机器人可以重复编程,且能够沿多种不同轨迹运动。
2.机器人的发展史随着数控机床的发展,模仿人类手臂操作工件的想法便自然地提出来了。
与常规观点相反,机器人学并非最近发展起来的。
事实上,早在20世纪60年代初期,美国人便制造出第一批机器人。
万能自动化公司于1961年就生产出机械手臂,其控制装置的时序是由操作者预设的。
然而,鉴于这项工作尚属试验,为了避免公众对该项目的抵制情绪,当时的仿形程度较低。
1974年,辛辛那提Millicron机器人成为首例以小型计算机控制的机器人。
然而,就在同一年,瑞典ASEA公司推出了它的IRB6机器人。
这种机器人一直在全球畅销,现在(1991年)还在生产,唯一的重大改进是控制柜电子装置与软件的升级。
所以,当人们以为美国正在建立机器人技术的时候,像日本和瑞典这样一些国家,机器人在工业中的应用已经达到很高的水平。
机械类英语词汇中英文对照
operatability操作性能
puter Numerical Control计算机数字控制
opportunity机会
cohesion结合,凝聚,内聚力结合
optimization最佳化,最优化
coin造词
oxidation氧化
cold-roll冷轧,冷轧机
oxyacetylene氧乙炔的
kinetic energy动能
actuation活动,激励,动作
L
additive附加的,加成的,添加的,添加剂
lag缓缓而行,滞后,落后于,押往监狱,加上外套
adequately充分地
lagos拉各斯,尼日利亚首都
affordable提供得起的
lathe车床
aggregate合计的,集合的
layer层,层次
critical magnitude临界值
prototype模型,原型机
cryogenic低温学的,低温的,低温贮存的
proto-typing初始制模
culmination顶点
provisional暂定的,假定的
cure固化,塑化
pulley(皮带)轮
custom-made定做的,订制的
punch冲床
loci点的轨迹(locus)
aqueous水的,水成的
lock washer锁紧垫圈,止动垫圈,防松垫圈
are available with用……有效
longitudinal经度的,纵向的
arrangement布置,排列
lower pair低副
articulated铰接的,有关节的
lubricant润滑剂,润滑材料
机械原理术语英汉对照
机械原理重要名词术语中英文对照表Aarchimedesworm阿基米得蜗杆BFifth-powerpolynomialmotion五次多项式运动规律oscillatingfollower摆动从动件camwithoscillatingfollower摆动从动件运动规律oscillatingguide-barmechanism摆动导杆机构cycloidalgear摆线齿轮cycloidalmotion摆线运动规律cycloidal-pinwheel摆线针轮angleofcontact包角backcone背锥backangle背锥角backconedistance背锥距scale比例尺closedkinematicchain闭式运动链closedchainmechanism闭式链机构arm臂部modifiedgear变位齿轮modificationcoefficient变位系数standardspurgear标准直齿轮combineinparallel并联式组合amountofunbalance不平衡量intermittentgearing不完全齿轮wavegenerator波发生器numberofwaves波数Cgenevawheel槽轮genevamechanism槽轮机构groovecam槽凸轮backlash侧系differentialgeartrain差动轮系differentialscrewmechanism差动螺旋机构differentials差速器space齿槽spacewidth齿槽宽addendum齿顶高addendumcircle齿顶圆dedendum齿根高dedendumcircle齿根圆thickness齿厚circularpitch齿距facewidth齿宽toothprofile齿廓toothcurve齿廓曲线gear齿轮pinionandrack齿轮齿条机构pinioncutter齿轮插刀hob,hobbingcutter齿轮滚刀gears齿轮机构blank齿轮轮坯teethnumber齿数gearratio齿数比rack齿条rackcutter齿条插刀coincidentpoints重合点contactratio重合度transmissionratio,speedratio传动比transmissionangle传动角combineinseries串连式组合drivenpulley从动带轮drivenlink,follower从动件widthofflat-face从动件平底宽度followerdwell从动件停歇followermotion从动件运动规律drivengear从动轮Dbeltdrives带传动beltpulley带轮universaljoint单万向联轴节unitvector单位矢量equivalentspurgear当量齿轮equivalentteethnumber当量齿数equivalentcoefficientoffriction当量摩擦系数cutter刀具lead导程leadangle导程角constantaccelerationanddecelerationmotion等加速等减速运动规律constantdiametercam等径凸轮constantbreadthcam等宽凸轮uniformmotion,constantvelocitymotion等速运动规律equivalentlink等效构件equivalentforce等效力equivalentmoment等效力矩equivalentmass等效质量equivalentmomentofinertia等效惯性力lowerpair低副clearance顶隙ordinarygeartrain定轴轮系dynamicbalance动平衡dynamicbalancingmachine动平衡机dynamiccharacteristics动态特性dynamicreaction动压力dynamicload动载荷transverseplane端面transverseparameters端面参数transversecircularpitch端面齿距transversecontactratio端面重合度transversemodule端面模数transversepressureangle端面压力角inlinerollerfollower对心滚子从动件inlineflat-facedfollower对心平底从动件inlineslidercrankmechanism对心曲柄滑块机构in-linetranslatingfollower对心移动从动件polynomialmotion多项式运动规律rotorwithseveralmasses多质量转子idlergear惰轮Fgeneratingline发生线generatingplane发生面normalplane法面normalparamenters法面参数normalcircularpitch法面齿距normalmodule法面模数normalpressureangle法面压力角feedbackcombining反馈式组合inversecammechanism反凸轮机构inverse(backward)kinematics反向运动学kinematicinversion反转法generating范成法formcutting仿形法flywheel飞轮momentofflywheel飞轮距nonstandardgear非标准齿轮aperiodicspeedfluctuation非周期性速度波动noncirculargear非圆齿轮standardpitchline分度线standardpitchcircle分度圆standardpitchcone分度圆锥planetarydifferential封闭差动轮系additionalmechanism附加机构compoundhinge复合铰链compoundcombining复合式组合compoundscrewmechanism复式螺旋机构complexmechanism复杂机构Ginterference干涉rigidc ircularspline刚轮bodyguidancemechanism刚体导引机构rigidimpulse(shock)刚性冲击rigidrotor刚性转子higherpair高副grashoff’slaw格拉晓夫定理undercutting根切workingspace工作空间effectiveresistance工作阻力effectiveresistancemoment工作阻力矩workingstroke工作行程commonnormalline公法线generalconstraint公共约束metricgears公制齿轮power功率conjugateprofiles共轭齿廓conjugatecam共轭凸轮link构件fixedlink,frame固定构件jointedmanipulator关节型操作器inertiaforce惯性力partialbalanceofshakingforce惯性力部分平衡momentofinertia,shakingmoment惯性力矩balanceofshakingforce惯性力平衡fullbalanceofshakingforce惯性力完全平衡pathgenerator轨迹发生器hob,hobbingcutter滚刀roller滚子radiusofroller滚子半径rollerfollower滚子从动件undercutting过度切割Hfunctiongenerator函数发生器interchangeablegears互换性齿轮slider滑块return,return-stroke回程compoundgeartrain复合轮系Jmechanism机构analysisofmechanism机构分析balanceofbalance机构平衡mechanism机构学kinematicdesignofmechanism机构运动设计kinematicdiagram机构运动简图synthesisofmechanism机构综合constitutionofmechanism机构组成frame,fixedlink机架kinematicinversion机架变换machine机器robot机器人manipulator机器人操作器robotics机器人学machinery机械dynamicanalysisofmachinery机械动力分析dynamicdesignofmachinery机械动力设计dynamicsofmachinery机械动力学mechanicaladvantage机械利益balanceofmachinery机械平衡manipulator机械手mechanicalbehavior机械特性mechanicalefficiency机械效率mechanismsandmachinetheory,theoryofmecha nismsandmachines机械原理coefficientofspeedfluctuation机械运转不均匀系数fundamentalmechanism基础机构basecircle基圆radiusofbasecircle基圆半径basepitch基圆齿距pressureangleofbasecircle基圆压力角basecylinder基圆柱basecone基圆锥quick-returnmechanism急回机构quick-returncharacteristics急回特性quick-returnmotion急回运动ratchet棘轮ratchetmechanism棘轮机构pawl棘爪extremeposition极限位置crankanglebetweenextremepositions极位夹角computeraideddesign计算机辅助设计computerintegratedmanufacturingsystem计算机集成制造系统acceleration加速度accelerationanalysis加速度分析accelerationdiagram加速度曲线knife-edgefollower尖底从动件intermittentmotionmechanism间歇运动机构simpleharmonicmotion(SHMforshort)简谐运动involutehelicoid渐开线螺旋面involute渐开线involuteprofile渐开线齿廓involutegear渐开线齿轮generatinglineofinvolute渐开线发生线involuteequation渐开线方程involutefunction渐开线函数involuteworm渐开线蜗杆pressureangleofinvolute渐开线压力角simpleharmonicmotion简谐运动cross-beltdrive交叉带传动crossedhelicalgears交错轴斜齿轮angularacceleration角加速度angularvelocity角速度angularvelocityratio角速比correctingplane校正平面structure结构structuralandmechanicalerror结构误差pitchpoint节点pitchline节线pitchcircle节园thicknessonpitchcircle节园齿厚pitchdiameter节圆直径pitchcone节圆锥pitchconeangle节圆锥角analyticaldesign解析设计diametralpitch径节clearance径向间歇staticbalance静平衡passivedegreeoffreedom局部自由度absolutemotion绝对运动absolutevelocity绝对速度loadbalanc ingmechanism均衡装置Kopen-beltdrive开口传动openkinematicchain开式链openchainmechanism开式链机构spatialmechanism空间机构spatiallinkages空间连杆机构spatialcams空间凸轮机构spatialkinematicpair空间运动副spatialkinematicchain空间运动链blockdiagram框图Lpitchcurve理论廓线force力forcepolygon力多边形force-closedcammechanism力封闭型凸轮机构moment力矩equilibrium力平衡couple[offorces],couples力偶momentofcouple力偶矩connectingrod,couple连杆linkages连杆机构couplecurve连杆曲线lineofcenters连心线chainwheel链轮two-dimensionalcam两维凸轮criticalspeed临界转速six-barlinkage六杆机构blank轮坯geartrain轮系screw螺杆threadpitch螺矩nut,screwnut螺母threadofascrew螺纹helicalpair螺旋副screwmechanism螺旋机构helicalangle螺旋角helix,helicalline螺旋线Mmodule模数friction摩擦frictionangle摩擦角frictionforce摩擦力frictionmoment摩擦力矩coefficientoffriction摩擦系数frictioncircle摩擦圆end-effector末端执行器objectivefunction目标函数N mechanismwithflexibleelements挠性机构flexiblerotor挠性转子internalgear内齿轮ringgear内齿圈engaging-out啮出engagement,meshingengagement,meshing啮合meshingpoint啮合点angleofengagement啮合角contactingline,pressureline,lineofengagement 啮合线lengthofcontactingline啮合线长度engaging-in啮入nomogram诺模图Pdiskcam盘形凸轮parabolicmotion抛物线运动beltpulley皮带轮offsetdistance偏距offsetcircle偏距圆eccentric偏心盘offsetrollerfollower偏置滚子从动件offfserknife-edgefollower偏置尖底从动件offsetflat-facefollower偏置平底从动件offsetslider-crankmechanism偏置曲柄滑块机构frequency频率flatbeltdrive带传动flat-facefollower平底从动件facewidth平底宽度balance平衡balancingmachine平衡机balancingquality平衡品质correctingplane平衡平面balancemass,qualityofmass平衡质量counterweight平衡重balancingspeed平衡转速planarpair,flatpair平面副planarmechanism平面机构planarkinematicpair平面运动副planarlinkage平面连杆机构planarcam平面凸轮parallelhelicalgears平行轴斜齿轮Qothermechanismmostinuse其它常用机构startingperiod起动阶段pneumaticmechanism气动机构singularposition奇异位置initialcontact,beginningofcontact起始啮合点forcedvibration强迫振动depthofcut切齿深度crank曲柄grashoff’slaw曲柄存在条件rotationguide-barmechanism转动导杆机构slider-crankmechanism曲柄滑块机构crank-rockermechanism曲柄摇杆机构curvature曲率radiusofcurvature曲率半径curved-shoefollower曲面从动件curvematching曲线拼接drivingforce驱动力drivingmoment驱动力矩wholedepth全齿高sphericalpair球面副sphericalinvolute球面渐开线sphericalmotion球面运动sphere-pinpair球销副polarcoordinatemanipulator球坐标操作器Rherringbonegear,doublehelicalgear人字齿轮redundantdegreeoffreedom冗余自由度flexspline柔轮flexibleimpulse,softshock柔性冲击flexiblemanufacturingsystem柔性制造系统flexibleautomation柔性自动化Sthree-dimensionalcam三维凸轮kennedy’stheorem,theoremofthreecenters三心定理planetarydrivewithsmallteethdifference少齿差行星传动designvariable设计变量rise升程camprofile实际廓线realpart实部vector矢量outputwork输出功outputlink输出构件outputmechanism输出机构outputtorque输出力矩outputshaft输出轴inputlink输入构件mathematicalmodel数学模型double-slidermechanism,ellipsograph双滑块机构doublecrankmechanism双曲柄机构constant-velocityuniversaljoints双万向联轴节doublerockermechanism双摇杆机构oldhamcoupling双转块机构instantaneouscenter瞬心deadpoint死点four-barlinkage四杆机构velocity速度speedfluctuation速度波动coefficientofspeedfluctuation速度波动系数velocitydiagram速度曲线instantaneouscenterofvelocity速度瞬心Tsteppulley塔轮sungear太阳轮characteristics特性equivalentmechanism替代机构governor调速器stoppingphase停车阶段dwell停歇synchronousbeltdrive同步带传动cam凸轮cams,cammechanism凸轮机构camprofile凸轮(实际)廓线layoutofcamprofile凸轮廓线绘制pitchcurve凸轮理论廓线graphicaldesign图解设计rise推程Wexternalgear外齿轮externalforce外力universaljoint,hooke’scoupling万向联轴节wrist腕部reciprocatingmotion往复移动differentialscrewmechanism差动螺旋机构displacement位移displacementdiagram位移曲线pose,positionandorientation位姿steadymotionperiod稳定运转阶段robustdesign稳健设计worm蜗杆wormgearing蜗杆传动机构numberofthreads蜗杆头数diametralquotient蜗杆直径系数wormandwormgear蜗杆蜗轮机构wormgear蜗轮Xcrankarm,planetcarrier系杆fieldbalancing现场平衡centrifugalforce离心力relativevelocity相对速度relativemotion相对运动pinion小齿轮harmonicdrive谐波传动helicalgear斜齿圆柱齿轮stroke工作行程coefficientoftravelspeedvariation,advance-tore turn-timeratio行程速比系数planetgear行星轮planetgeartrain行星轮系planetcarrier行星架form-closedcammechanism形封闭凸轮机构virtualreality虚拟现实redundantconstraint虚约束imaginarypart虚部allowableamountofunbalance许用不平衡量allowablepressureangle许用压力角circulatingpowerload循环功率流Ypressureangle压力角jacobimatrix雅克比矩阵rocker摇杆hydrodynamicdrive液力传动hydraulicmechanism液压机构reciprocatingfollower移动从动件slidingpair,prismaticpair移动副prismaticjoint移动关节wedgecam移动凸轮incrementordecrementwork盈亏功optimaldesign优化设计detrimentalresistance有害阻力simpleharmonicmotion余弦加速度运动roundbeltdrive圆带传动circulargear圆形齿轮cylindricpair圆柱副cylindricalcam圆柱凸轮cylindricalworm圆柱蜗杆cylindricalcoordinatemanipulator圆柱坐标操作器bevelgears圆锥齿轮机构coneangle圆锥角drivinglink原动件constraint约束constraintcondition约束条件jerk跃度jerkdiagram跃度曲线kinematicinversion运动倒置kinematicanalysis运动分析kinematicpair运动副movinglink运动构件kinematicdiagram运动简图kinematicchain运动链motionskewness运动失真kinematicdesign运动设计cycleofmotion运动周期kinematicsynthesis运动综合coefficientofvelocityfluctuation运动不均匀系数Zload载荷generating展成法,范成法tensionpulley张紧轮vibration振动shakingcouple振动力矩frequencyofvibration振动频率amplitudeofvibration振幅tangentmechanism正切机构direct(forward)kinematics正向运动学sinegenerator,scotchyoke正弦机构spurgear直齿圆柱齿轮cartesiancoordinatemanipulator直角坐标操作器diametralquotient直径系数mass-radiusproduct质径积mid-plane中间平面centerdistance中心距centerdistancechange中心距变动centralgear中心轮finalcontact,endofcontact终止啮合点periodicspeedfluctuation周期性速度波动epicyclicgeartrain周转轮系togglemechanism肘形机构shaftangle轴角axialthrustload轴向分力drivinggear主动齿轮drivingpulley主动带轮rotatingguide-barmechanism转动导杆机构revolutepair转动副revolutejoint转动关节rotor转子balanceofrotor转子平衡assemblycondition装配条件bevelgear锥齿轮commonapexofcone锥顶conedistance锥距conepulley锥轮sub-mechanism子机构automation自动化self-locking自锁degreeoffreedom(dofforshort)自由度totalcontactratio总重合度resultantforce总反力overlapcontactratio纵向重合度combinedmechanism组合机构minimumteethnumber最少齿数minimumradius最小向径appliedforce作用力coordinateframe坐标系。
机器人专业英语ABB机器人

机器人专业英语ABB机器人indicator英['?nd?.ke?t?(r)]名词.指示物university英[.ju?n?'v??(r)s?ti]名词.(综合性)大学,高等学府maintenance英['me?nt?n?ns]名词.维护,维持,保养,保持described英[d?'skra?bd]v.描述,描写(describe的过去式)manipulator英[m?'n?pj?.le?t?(r)]名词.操纵者机械手,操纵器,操作机circuit英['s??k?t]美['s?k?t]n[电子]电路,回路;section['sek?(?)n]n.截面;部分;部门be mounted in被安装在resolution分辨率英[rez?'lu??(?)n]figure英['f?g?]美['f?ɡj?]n.图形;item['a?t?m]n.条款,项目unless otherwise stated除非另做说明stated英['ste?t?d]adj.规定的;阐明的;定期的v.规定(state的过去分词);陈述;阐明applicable英[?'pl?k?b(?)l;adj.可适用的;可应用的;合适的facts因素change of state状态改变is required for需要是必需的It is required for the run data.You have no choice.运行数据需要这些数据,没有选择的余地。
establish英[?'st?bl??;e-]vt.建立;创办;安置description英[d?'skr?p?(?)n]n.描述,描写;类型;说明书instruction英[?n'str?k?(?)n]n.指令,命令;指示;教导;用法说明supervision of the supply voltage电源电压的监督in order to do为了regular['regj?l?]adj.定期的;有规律的;合格的;整齐的;普通particular英[p??t?kj?l?(r)]adj.特别的;详细的;独有的;挑剔的prevent disturbance防止干扰cause英[k??z]美[k?z]n.原因;事业;目标series resistance串联电阻capacitor英[k?'p?s?t?]n.[电]电容器unsigned英[?n'sa?nd]adj.无符号的;未签名的input map输入映射optically isolated光隔离光学隔离serial measurement board串行测量板complete robot systems整个机器人系统the PC can be disconnected when not transferring data between the server and controller.如果不需要在服务器与控制器之间传送数据,可以断开与电脑的连接。
工业机器人英汉词汇
工业机器人英汉词汇Aabrasive wheel 砂轮绝对精度absolute accuracy交流变频器驱动AC inverter drive加速性能 acceleration performance加速时间acceleration time准确定位accurate positioning适应控制adaptive controladaptive robot 适应机器⼈附加轴additional axis附加负载additional loadadditional mass附加质量附加操作additional operation㬵黏剂密封adhesive sealingadvanced collision avoidance高级碰撞避免航空航天工业 aerospace industryagricultural robot农业机器人air robot 空中机器人air tube 空气管alignment pose 校准位姿全电动工业机器人 all-electric industrial robotant colony algorithm蚁群算法 anthropomorphic robot 拟人机器人应用程序application program圆弧示教arc teachingarc welding 点焊,电弧焊弧焊机器人arc welding purpose robot电弧焊机器人arc welding robotarch motion 圆弧运动arm 手臂手臂配置arm configuration关节模型articulated model铰接式机器人,关节(形)机器人 articulated robot关节结构articulated structure人工智能artificial intelligence流水线,装配线assembly lineassembly robot 装配机器人atomization air雾化空气attained pose 实到位姿增强现实技术 augmented reality technologyauto part 汽车零件自动码垛automated palletizingautomated production 自动化生产automatic assembly line自动装配线自动控制automatic control末端执行器自动更换装置 automatic end effector exchanger自动物流运输automatic logistics transportautomatic mode 自动模式自动操作automatic operation自动换刀automatic tool changerautomatically controlled自动控制automation technology 自动化技术汽车行业automotive industry辅助轴电缆auxiliary axis cableaxis 轴axis movement 轴运动BBase 机座机座坐标系base coordinate system机座安装面base mounting surfacebeltless structure无带结构bend motion 弯曲运动big data 大数据bio-inspired robotics仿生机器人制动过滤器brake filter制动电阻brake resistor内置碰撞检测功能 built-in collision detection feature内置控制器built-in controller内置梯形图逻辑处理 built-in ladder logic processingbus cable 总线电缆C电缆干扰cable interferencecamera sensor 相机传感器基于相机的工件定位 camera-based part locationCartesian coordinate笛卡尔坐标系笛卡尔坐标机器人 Cartesian coordinate robot直⻆坐标机器人cartesian robot儿童看护机器人child care robotclean room 洁净室clean room robot 清洁室机器人cloud computing 云计算云存储技术cloud storage technology协作机器人collaborative robot彩色触摸屏color touch screencombustible gas 可燃气体command pose 指令位姿commissioning 试运行communication feature 通信功能communication protocol 通信协议紧凑式六臂机器人compact six-axis robotcompliance 柔顺性component placemen 元件贴装复合材料composite materialcompound movement 复合运动compressed air 压缩空气计算机数控computer numerical control计算机数控机床 computer numerical control machine计算机数控系统 computer numerical control systemcomputing control 计算控制computing power 计算能力构形configuration无缝连接connect seamlessly可连接控制器connectable controllerconsumable part 中小型零部件消费类电子产品consumer electronicscontinuous path 连续路径连续路径控制continuous path control轨迹控制continuous- path controlled控制算法control algorithmcontrol electronics电子控制装置control movement 控制运动control program 控制程序control scheme 控制方案control system 控制系统控制器机柜;控制柜 controller cabinet控制器系统面板 controller system panel (CSP)人机协作 cooperation of humans and machines坐标变换 coordinate transformation核心竞争力core competitiveness对应关节corresponding joint曲线示教curve teaching网络物理系统cyber-physical systemcycle 循环cycle time 循环时间圆柱坐标系 cylindrical coordinate systemcylindrical joint圆柱关节圆柱坐标机器人cylindrical robotD达芬奇手术机器人 DaVinci surgical robot电弧焊机器人 dedicated arc welding robot防护等级degree of protectiondegrees of freedom 自由度Delta并联关节机器人 Delta parallel joint robotDelta robot Delta机器人DexTAR教育机器人 DexTAR educational robotdie-casting machine压铸机数字动力digital power直接空气管路direct air line直接耦合direct coupling直接驱动direct drive残障辅助机器人 disability auxiliary robotdisplacement machine 变位机距离准确度distance accuracy距离重复性distance repeatability分布关节distributed jointDOF 自由度double-arm SCARA robot 双臂SCARA机器人 drawing machine 拉丝机drift of pose accuracy位姿准确度漂移位姿重复性漂移 drift of pose repeatability伺服驱动器轴drive controller for axesdrive controller伺服驱动器drive mechanism 驱动机构drive power supply驱动电源驱动比drive ratio驱动单元drive unitdriving device驱动装置dual arm 双臂。
关于机器人的专业术语

关于机器人的专业术语机器人术语解析机器人是一种能够自动执行任务的机械装置。
在现代科技领域,机器人已经成为一个热门话题,被广泛应用于各个领域,如制造业、医疗保健、农业和服务业。
本文将解析与机器人相关的一些专业术语,帮助读者更好地理解和掌握机器人技术。
1. 人工智能(Artificial Intelligence,AI)人工智能是机器人技术中的重要组成部分。
它是一种模拟人类智能的技术,使机器能够像人类一样思考、学习和决策。
人工智能使机器人能够自主地处理复杂的任务,并根据环境和情境做出相应的反应。
2. 自主导航(Autonomous Navigation)自主导航是指机器人能够自主地在环境中移动和定位的能力。
通过使用传感器和算法,机器人可以感知周围的环境并制定路径规划,以达到目标位置。
自主导航是实现无人驾驶车辆和无人机等应用的关键技术。
3. 机器视觉(Computer Vision)机器视觉是指机器模拟和理解人类视觉的能力。
通过使用摄像头和图像处理算法,机器可以感知和分析图像中的对象、形状和运动。
机器视觉技术被广泛应用于检测、识别和跟踪物体,例如工业机器人中的物体抓取和质量检测。
4. 机器学习(Machine Learning)机器学习是一种让机器能够通过数据自主学习和改进的技术。
通过训练模型,机器可以从大量的数据中发现模式和规律,并用于预测和决策。
机器学习被广泛应用于人脸识别、语音识别和自然语言处理等领域。
5. 机械臂(Robotic Arm)机械臂是一种能够模拟人类手臂运动的机器人组件。
它通常由关节、驱动器和执行器等部件组成,可以完成各种复杂的动作,如物体抓取、搬运和装配。
机械臂在制造业中被广泛应用,提高了生产效率和质量。
6. 传感器(Sensor)传感器是机器人的感知器官,用于感知环境中的物理量和状态。
常见的传感器包括摄像头、激光雷达、红外线传感器和触摸传感器等。
通过传感器,机器人可以获取周围环境的信息,并作出相应的反应和决策。
【发那科FANUC机器人】中英文对照表

【发那科FANUC机器⼈】中英⽂对照表簡稱英⽂中⽂ABS Acrylonitrile-Butadiene-Styrene 丙烯腈-丁⼆烯-苯⼄烯共聚合物ASA Acrylic-styrene-acrylonitrile 丙烯酸-苯⼄烯-丙烯腈CA Cellulose Acetate 纖維素醋酸酯CAP Cellulose Acetate Propionate 纖維素醋酸丙酸酯CB Cellulose Butyrate 纖維素酪酸酯CP Cellulose Propionate 纖維素丙酸酯CTFE Polychlorotrifluoroethylene 聚⼀氯三氟⼄烯EAA Ethylene Acrylic Acid(TP) ⼄烯丙烯酸EAE Ethylene Acrylic Ester(TP) ⼄烯丙烯酸⼄酯ECTFE Ethylene-chlorotrifluoroeethylene ⼄烯⼀氯三氟⼄烯共聚合物EMA Ethylene Methyl Acrylate(TP) ⼄烯甲基丙烯酸酯EMAA Ethylene Methacrylic Acid ⼄烯丙烯酸甲酯ENBA Ethylene N-Butyl Acrylate(TP) ⼄烯丁基丙烯酸酯ETFE Copolymer of ethylene and chlorotetrafluoroethylene ⼄烯⼀氯四氟⼄烯共聚合物EVA Ethylene Vinyl Acetate(TP) ⼄烯⼄基丙烯酸酯EVOH Ethylene Vinyl Silane(TP) ⼄烯⼄基醇FEP Fluorinated ethylene-propylene 氟化⼄烯丙烯HDPE High density Polyethylene ⾼密度聚⼄烯123。
机器人专业词汇中英文对照
ACAS Applicator Cleaner Air Supply 雾化器清洗器供气pACS Applicator Cleaner Solvent Pilot 雾化器清洗器溶剂控制阀ACS Applicator Cleaner Solvent 雾化器清洗器溶剂ACVA Applicator Cleaner Vacuum Air 雾化器清洗器真空空气ACDA Applicator Cleaner Drying Air 雾化器清洗器干燥空气BEAR Bearing Air 轴承空气BAO Bearing Air OK 轴承空气正常BRAKE Brake Air Turbine 涡轮刹车空气pBW Bell Wash Pilot 旋杯清洗控制阀BWS Bell Wash Supply 旋杯清洗供应AIR Color Change Air Supply 换色空气供应SOL Color Change Solvent Supply 换色溶剂供应CP# Color Pilot (#) = Color 颜色控制阀(#)= 颜色DUMP Dump 排放DAT Drive Air Turbine 涡轮驱动空气E-STAT Electrostatics 静电pIW Injector Wash Pilot 注射器清洗控制阀IWS Injector Wash Supply 注射器清洗供应PAINT Paint 油漆PAP Purge Air Pilot 冲洗空气控制阀pCC Pilot Color Change 换色控制阀PCE Process Control Enclosure 工艺控制柜pDUMP Pilot Dump 排放控制阀PDP Power Distribution Panel 配电柜PIE Process Interface Enclosure 工艺接口柜PREG Pilot Regulator 调节器控制阀PR# Paint Return (#) = Color 油漆回路(#)= 颜色PS# Paint Supply (#) = Color 油漆进路(#)= 颜色pPS Purge Solvent Pilot 冲洗溶剂控制阀pTRIG Pilot Trigger 触发器控制阀PTS Pilot Trigger Supply 触发器供应控制阀RP Robot Purge 机器人净化SA1 Shaping Air (Bell Applicator) 成形空气(旋杯雾化器)SA2 Shaping Air (Bell Applicator) 成形空气(旋杯雾化器)SAP Shaping Air Pilot 成形空气控制阀SAS Shaping Air Supply 成形空气供气SCC System Control Console 系统控制柜TDP Turbine Drive Pilot (Bell Applicator) 涡轮驱动控制阀(旋杯雾化器)TURB Turbine Drive Supply 涡轮驱动供气Purge System Maintenance净化系统维护- Purge System Diagnostics净化系统诊断- Purge System Testing andCalibration净化系统测试和校准- Purge Cycle Troubleshooting净化循环排错•Color Changer Assembly换色器组件- Color Changer Valve Maintenance换色阀门维护•SolvAir Module Setup and Maintenance 溶剂空气模块设置和维护•3 Valve IK Gear Pump3阀门1K齿轮泵- Pump Block Pressure Sensor泵的压力传感器•Process Control Maintenance工艺控制维护- Fluid Presets Maintenance流体预设值维护- E-stat Presets Maintenance静电预设值维护- Preset Override Maintenance强制预设值维护- Color Change Maintenance换色维护•Pepperl & Fuchs ISB SettingsPepperl & Fuchs ISB设置•Robot Software Maintenance机器人软件维护- I/O Re-configurationI/O 重新配置- Robot File Copy机器人文件复制- Robot System Variables Editing Transducer Operations比例阀的操作- Shaping Air Control成形空气的控制- D/Q Shaping Air Control ModuleD/Q 成形空气控制模块- Turbine Speed Control涡轮速度控制- Keyence Digital Fiber SensorKeyence 数字光线传感器•Fluid Calibration - Beaker Method流体校准–量杯的方法•System Configuration Maintenance系统配置维护- System Colors Maintenance系统颜色维护- Styles Maintenance车型维护- Option Maintenance选项维护- PW3 SetupPW3 设置机器人系统变量编辑- Software Archive软件存档- Backup a Robot Image备份一个机器人镜像- Restore a Robot Image恢复一个机器人镜像•Paintworks III Software MaintenancePaintworks III软件维护- Creating a Norton Ghost 2003Boot Disk Set创建一个Norton Ghost2003 启动盘- Backing Up Your PAINTworks IIIGUI备份你的PAINTworksIII GUI。
工业机器人技术英语

工业机器人技术英语
随着制造业的发展和技术的进步,工业机器人已经成为现代制造业中不可或缺的一部分。
工业机器人通过自动化、智能化的方式来完成各种生产任务,具有高效、安全、精确等优点,被广泛应用于汽车制造、电子产品制造、食品加工等领域。
在学习和研究工业机器人技术时,英语是必不可少的工具。
以下是一些与工业机器人相关的常用英语词汇和表达:
1. Industrial robot:工业机器人
2. Robot arm:机械臂
3. End effector:末端执行器
4. Programming language:编程语言
5. Robot controller:机器人控制器
6. Sensor:传感器
7. Actuator:执行器
8. Servo motor:伺服电机
9. Cartesian coordinate system:直角坐标系
10. Robot vision system:机器人视觉系统
11. Teach pendant:手持编程器
12. Safety barrier:安全屏障
13. Collaborative robot:协作机器人
14. Automated guided vehicle:自动引导车
15. Pick and place:取放式操作
16. Assembly line:装配线
17. Welding robot:焊接机器人
18. Painting robot:喷漆机器人
19. Palletizing robot:托盘堆垛机器人
20. Robot integration:机器人集成
掌握这些常用的英语词汇和表达,有助于更好地理解和应用工业机器人技术。
机器人专有名词简介
1、PCB 印制电路板、印刷电路板或印刷线路板PCB(Printed Circui tBoard),中文名称为印制电路板,又称印刷电路板、印刷线路板,是重要的电子部件,是电子元器件的支撑体,是电子元器件电气连接的提供者。
由于它是采用电子印刷术制作的,故被称为“印刷”电路板。
根据电路层数分类:分为单面板、双面板和多层板。
常见的多层板一般为4层板或6层板,复杂的多层板可达几十层。
2、FPGA 现场可编程门阵列FPGA(Field-Programmable Gate Array),即现场可编程门阵列,它是在PAL、GAL、CPLD等可编程器件的基础上进一步发展的产物。
它是作为专用集成电路(ASIC)领域中的一种半定制电路而出现的,既解决了定制电路的不足,又克服了原有可编程器件门电路数有限的缺点。
3、VLSI 超大规模集成电路超大规模集成电路(Very Large Scale Integration)4、FIFO 是一中先进先出的数据缓存器FIFO是英文First In First Out 的缩写,是一种先进先出的数据缓存器,他与普通存储器的区别是没有外部读写地址线,这样使用起来非常简单,但缺点就是只能顺序写入数据,顺序的读出数据,其数据地址由内部读写指针自动加1完成,不能像普通存储器那样可以由地址线决定读取或写入某个指定的地址。
5、PAL 电视标准PAL电视标准,每秒25帧,电视扫描线为625线,奇场在前,偶场在后,标准的数字化PAL电视标准分辨率为720*576, 24比特的色彩位深,画面的宽高比为4:3, PAL电视标准用于中国、欧洲等国家和地区,PAL制电视的供电频率为50Hz,场频为每秒50场,帧频为每秒25帧,扫描线为625行,图像信号带宽分别为4.2MHz、5.5MHz、5.6MHz等。
PAL和NTSC制式区别在于节目的彩色编、解码方式和场扫描频率不同。
中国(不含香港地区)、印度、巴基斯坦等国家采用PAL制式,美国、日本、韩国以及我国台湾地区等采用NTSC制式。
机器人的英语单词
三一文库()〔机器人的英语单词〕*篇一:机器人英语名词RoboticsMechanism-Workshop(VocabularyI)机器人机械装置-动手制作部分(词汇I)TheLEGOMindstormsEV3setisdesignedtoallowbuilderstoc reatedifferentrobots,vehiclesandothercontraptionswi thmovingparts.乐高头脑风暴机器人EV3的设计允许建造者创造不同的机器人,车辆和其他具有移动部件的装置。
HerewelearnaboutexploringthemechanicalsideofEV3andR obotics,ratherthanprogramming.我们学习开发EV3的机械部分和机器人学,而不是编程。
Machine机器Contraptions装置BasicMechanisms基础机械Gear齿轮Gearratios齿轮比Compound复合的Compoundgearsystems复合齿轮系统(复合齿轮组)Rotation旋转Theangleofrotation旋转角度Workdrives驱动器SwingMechanisms机械,机构SwingingmechanismsReciprocate往复运动Reciprocatingmechanism往复机构(曲拐机构)Cam凹轮Cammechanisms凸轮机构Intermittent间歇的Motion运动Intermittentmotion间歇运动TransmitTransmittingrotationRubberbands橡皮筋;摩擦索线Caterpillartreads履带轮底Off-centeraxesofrotation偏心轴旋转Joints接点,接触点Vehicle车辆Drivingwheelswithamotor用电机驱动车轮Caster脚轮Crawlers履带牵引装置SuspendedwheelsSteering操纵Vibration振动FlappingwingsGrippingfingers钳形指LiftingShootingAutomaticdoors自动门RakinguporoutCreatingwindSwingingapendulumAttachments附属装置Meshinggearsdiagonally啮合斜齿轮Sensors传感器Touchsensors触感Colorsensors色感Pythagoreantheorem勾股定理*篇二:机器人专业词汇中英文对照ACASApplicatorCleanerAirSupply雾化器清洗器供气pACSApplicatorCleanerSolventPilot雾化器清洗器溶剂控制阀ACSApplicatorCleanerSolvent雾化器清洗器溶剂ACVAApplicatorCleanerVacuumAir雾化器清洗器真空空气ACDAApplicatorCleanerDryingAir雾化器清洗器干燥空气BEARBearingAir轴承空气BAOBearingAirOK轴承空气正常BRAKEBrakeAirTurbine涡轮刹车空气pBWBellWashPilot旋杯清洗控制阀BWSBellWashSupply旋杯清洗供应AIRColorChangeAirSupply换色空气供应SOLColorChangeSolventSupply换色溶剂供应CP#ColorPilot(#)=Color颜色控制阀(#)=颜色DUMPDump排放DATDriveAirTurbine涡轮驱动空气E-STATElectrostatics静电pIWInjectorWashPilot注射器清洗控制阀IWSInjectorWashSupply注射器清洗供应PAINTPaint油漆PAPPurgeAirPilot冲洗空气控制阀pCCPilotColorChange换色控制阀PCEProcessControlEnclosure工艺控制柜pDUMPPilotDump排放控制阀PDPPowerDistributionPanel配电柜PIEProcessInterfaceEnclosure工艺接口柜PREGPilotRegulator调节器控制阀PR#PaintReturn(#)=Color油漆回路(#)=颜色PS#PaintSupply(#)=Color油漆进路(#)=颜色pPSPurgeSolventPilot冲洗溶剂控制阀pTRIGPilotTrigger触发器控制阀PTSPilotTriggerSupply触发器供应控制阀RPRobotPurge机器人净化SA1ShapingAir(BellApplicator)成形空气(旋杯雾化器)SA2ShapingAir(BellApplicator)成形空气(旋杯雾化器)SAPShapingAirPilot成形空气控制阀SASShapingAirSupply成形空气供气SCCSystemControlConsole系统控制柜TDPTurbineDrivePilot(BellApplicator)涡轮驱动控制阀(旋杯雾化器)TURBTurbineDriveSupply涡轮驱动供气PurgeSystemMaintenance净化系统维护-PurgeSystemDiagnostics净化系统诊断-PurgeSystemTestingandCalibration净化系统测试和校准-PurgeCycleTroubleshooting净化循环排错?ColorChangerAssembly换色器组件-ColorChangerValveMaintenance换色阀门维护?SolvAirModuleSetupandMaintenance溶剂空气模块设置和维护?3ValveIKGearPump3阀门1K齿轮泵-PumpBlockPressureSensor泵的压力传感器?ProcessControlMaintenance工艺控制维护-FluidPresetsMaintenance流体预设值维护-E-statPresetsMaintenance静电预设值维护-PresetOverrideMaintenance 强制预设值维护-ColorChangeMaintenance换色维护?PepperlFuchsISBSettings PepperlFuchsISB设置?RobotSoftwareMaintenance机器人软件维护-I/ORe-configurationI/O重新配置-RobotFileCopy机器人文件复制-RobotSystemVariablesEditing TransducerOperations比例阀的操作-ShapingAirControl成形空气的控制-D/QShapingAirControlModule D/Q成形空气控制模块-TurbineSpeedControl涡轮速度控制-KeyenceDigitalFiberSensor Keyence数字光线传感器?FluidCalibration-BeakerMethod 流体校准–量杯的方法?SystemConfigurationMaintenance 系统配置维护-SystemColorsMaintenance系统颜色维护-StylesMaintenance车型维护-OptionMaintenance选项维护-PW3SetupPW3设置机器人系统变量编辑-SoftwareArchive软件存档-BackupaRobotImage备份一个机器人镜像-RestoreaRobotImage恢复一个机器人镜像?PaintworksIIISoftwareMaintenance PaintworksIII软件维护-CreatingaNortonGhost2003 BootDiskSet创建一个NortonGhost2003启动盘-BackingUpYourPAINTworksIIIGUI备份你的PAINTworksIIIGUI。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ACAS Applicator Cleaner Air Supply 雾化器清洗器供气pACS Applicator Cleaner Solvent Pilot 雾化器清洗器溶剂控制阀ACS Applicator Cleaner Solvent 雾化器清洗器溶剂ACVA Applicator Cleaner Vacuum Air 雾化器清洗器真空空气ACDA Applicator Cleaner Drying Air 雾化器清洗器干燥空气BEAR Bearing Air 轴承空气BAO Bearing Air OK 轴承空气正常BRAKE Brake Air Turbine 涡轮刹车空气pBW Bell Wash Pilot 旋杯清洗控制阀BWS Bell Wash Supply 旋杯清洗供应AIR Color Change Air Supply 换色空气供应SOL Color Change Solvent Supply 换色溶剂供应CP# Color Pilot (#) = Color 颜色控制阀(#)= 颜色DUMP Dump 排放DAT Drive Air Turbine 涡轮驱动空气E-STAT Electrostatics 静电pIW Injector Wash Pilot 注射器清洗控制阀IWS Injector Wash Supply 注射器清洗供应PAINT Paint 油漆PAP Purge Air Pilot 冲洗空气控制阀pCC Pilot Color Change 换色控制阀PCE Process Control Enclosure 工艺控制柜pDUMP Pilot Dump 排放控制阀PDP Power Distribution Panel 配电柜PIE Process Interface Enclosure 工艺接口柜PREG Pilot Regulator 调节器控制阀PR# Paint Return (#) = Color 油漆回路(#)= 颜色PS# Paint Supply (#) = Color 油漆进路(#)= 颜色pPS Purge Solvent Pilot 冲洗溶剂控制阀pTRIG Pilot Trigger 触发器控制阀PTS Pilot Trigger Supply 触发器供应控制阀RP Robot Purge 机器人净化SA1 Shaping Air (Bell Applicator) 成形空气(旋杯雾化器)SA2 Shaping Air (Bell Applicator) 成形空气(旋杯雾化器)SAP Shaping Air Pilot 成形空气控制阀SAS Shaping Air Supply 成形空气供气SCC System Control Console 系统控制柜TDP Turbine Drive Pilot (Bell Applicator) 涡轮驱动控制阀(旋杯雾化器)TURB Turbine Drive Supply 涡轮驱动供气Purge System Maintenance净化系统维护- Purge System Diagnostics净化系统诊断- Purge System Testing andCalibration净化系统测试和校准- Purge Cycle Troubleshooting净化循环排错•Color Changer Assembly换色器组件- Color Changer Valve Maintenance换色阀门维护•SolvAir Module Setup and Maintenance 溶剂空气模块设置和维护•3 Valve IK Gear Pump3阀门1K齿轮泵- Pump Block Pressure Sensor泵的压力传感器•Process Control Maintenance工艺控制维护- Fluid Presets Maintenance流体预设值维护- E-stat Presets Maintenance静电预设值维护- Preset Override Maintenance强制预设值维护- Color Change Maintenance换色维护•Pepperl & Fuchs ISB SettingsPepperl & Fuchs ISB设置•Robot Software Maintenance机器人软件维护- I/O Re-configurationI/O 重新配置- Robot File Copy机器人文件复制- Robot System Variables Editing Transducer Operations比例阀的操作- Shaping Air Control成形空气的控制- D/Q Shaping Air Control ModuleD/Q 成形空气控制模块- Turbine Speed Control涡轮速度控制- Keyence Digital Fiber SensorKeyence 数字光线传感器•Fluid Calibration - Beaker Method流体校准–量杯的方法•System Configuration Maintenance系统配置维护- System Colors Maintenance系统颜色维护- Styles Maintenance车型维护- Option Maintenance选项维护- PW3 SetupPW3 设置机器人系统变量编辑- Software Archive软件存档- Backup a Robot Image备份一个机器人镜像- Restore a Robot Image恢复一个机器人镜像•Paintworks III Software MaintenancePaintworks III软件维护- Creating a Norton Ghost 2003Boot Disk Set创建一个Norton Ghost2003 启动盘- Backing Up Your PAINTworks IIIGUI备份你的PAINTworksIII GUI。
- Copying Your Ghost Image Filesto CDs把你的Ghost 镜像文件复制到CDs。
- Restoring Your PAINTworks IIIGUI恢复你的PANITworks III GUI。
pAIR PAP Pilot input for Purge Air净化空气的驱动输入pSOLV PSP Pilot input for Purge Solvent净化溶剂的驱动输入AIR CCAS Purge Air supply input净化气源输入SOL CCSS Purge Solvent supply input净化溶剂供应输入pCC PCC Pilot for Color Changer operation. When this input is enabled, thepurge air and solvent mixture will be directed to the color changermanifold as aerated solvent.换色器操作的驱动。
这个输入被激活时,净化空气和溶剂混合物会直接通向换色器多只管,像充气的溶剂一样。
2T Output 2T Secondary output (used for Applicator Wash). Solvent or air or the aerated mixture is always available at this port. If it is not requiredin the system, the port must be plugged.二次输出(用于雾化器清洗)。
在这个端口一直有溶剂、空气或者混物。
如果系统没有要求,这个端口必须被塞紧。
1K Process Assembly with a Regulator 含调整器的1K 工艺组件EO-4696-511-000 Rev. A Sheet 1 of 1 EO-4696-511-000 Rev. A版第一页/共一页COLOR CHANGER (24 COLOR MAX.) 换色器(最多24种颜色)WASH 清洗INJECTOR 注射器WASH 清洗PAINT ENABLE 喷漆激活TRIGGER 触发器BELL WASH 杯头清洗PAINT 油漆SOLV/AIR 溶剂/空气AIR 空气RECOVERY 回收DUMP 排放2K Process Assembly with a Regulator Schematic 含调整器的2K工艺组件示意图EO-4696-517-000 Rev. C4 Sheet 1 of 1 EO-4696-517-000 Rev. C4版第一页/共一页COLOR CHANGER (4 COLOR MAX.) 换色器(最多四种颜色)INJECTOR WASH 注射器清洗PAINT ENABLE 喷漆激活TRIGGER 触发器BELL WASH 杯头清洗CAT 架子DUMP 排放FLUSH 齐平AIR1 空气1SOLV/AIR 溶剂/空气WASH 清洗SOL2 溶剂20-500 PSI 0-500 PSIApplicator Interface 雾化器接口ET-4696-890-001 Rev. A Sheet 1 of 1 ET-4696-890-001 Rev. A版第一页/共一页ORIGIN OF TOOL FRAME 工具坐标系原点BOLT HOLES 螺栓孔FAN 风扇FAN 风扇FACE PLATE 面板TOOL FRAME 工具架EDGE OF BELL CUP 杯头边缘SECTION A-A A-A截面SCRMO00000277N (6) SCRMO00000277N (6)M6 Craftech Scr. M6 工艺技术螺丝Torque to 1.25 Nm 转矩至1.25 NmPINLM005000012S PINLM005000012S工作特征备注最高运行电压90kV正常旋转速度20到45 kRPM最高旋转速度* 45 到60 kRPM喷漆正常流速0到300 cc/min最大流速500 cc/min正常喷漆应用压力90到120 psi最大喷漆应用压力150 psi粘度范围50到200 cps空气空气压强供应85 psi min空气供应过滤: 级别1 按照DIN ISO 8573-1空气消耗涡轮支承57 slpm涡轮在60,000 rpm** 119 slpm成形空气70到500 slpm密封空气0到50 slpm (通常不需要)电气能量供应120 v 50/60 HzTube Requirements 管道要求ET-4696-890-002 Rev. B1 Sheet 1 of 1 ET-4696-890-002 Rev. B1版第一页/共一页SECTION A-A A-A截面BRAKE 制动空气PAINT 油漆管路SPEED 速度BEAR 轴承空气SEAL 密封空气TURB 涡轮空气WASH 清洗NOTES: 注意:1. TUBING SHOULD BE INSTALLED WITH ROBOT IN ZERO POSITION.管道应与机器人一起安装在零点位置。