卡尔曼滤波算法matlab程序
卡尔曼滤波轨迹预测matlab
卡尔曼滤波是一种由芬兰控制理论专家卡尔曼(R.E.Kalman)于20世纪60年代提出的一种适用于线性动态系统的状态估计方法,它的原理是根据系统的数学模型通过观测数据对系统状态进行动态估计,具有对系统参数模型的误差进行校正、对系统运动的预测与跟踪的优点。
在今天的科学技术发展中,卡尔曼滤波已经广泛应用于航空航天、导航、通信、天文测量、生物医学工程等众多领域。
其中,在轨迹预测方面,卡尔曼滤波可以通过对目标的动态模型进行建模,结合观测数据,实现对目标位置的精确预测。
而在使用matlab进行卡尔曼滤波轨迹预测时,通常需要按照以下步骤进行操作:1. 建立系统模型在matlab中,首先需要根据目标运动的特点建立系统的动态模型。
这个过程通常会涉及到目标的运动方程、动态参数、观测误差等内容。
在建立好系统模型后,可以将系统模型表示为状态方程和观测方程。
2. 初始化滤波器参数在进行卡尔曼滤波之前,需要对滤波器的初始状态进行初始化,这包括系统状态向量的初始估计、系统噪声和观测噪声的协方差矩阵等参数的初始化。
3. 观测数据处理在实际应用中,通常会通过传感器或者其他设备获取目标的观测数据,这些数据需要进行预处理,包括去噪、滤波等操作,以提高滤波器的效果。
4. 卡尔曼滤波预测在完成上述准备工作后,就可以利用matlab中的卡尔曼滤波函数进行轨迹预测了。
这个过程通常包括对观测数据和系统模型进行融合,实现对目标轨迹的准确预测。
5. 评估与调整需要对滤波结果进行评估与调整。
这个过程包括对滤波器参数的调整优化以及与实际观测数据进行对比等步骤,以保证滤波器的准确性与稳定性。
总结来看,matlab在卡尔曼滤波轨迹预测中具有良好的适用性和灵活性,可以帮助用户快速、准确地实现对目标轨迹的预测与跟踪。
但在实际应用中,用户需要根据具体的系统模型和观测数据特点来合理选择滤波参数,以最大程度地发挥卡尔曼滤波的优势。
在进行卡尔曼滤波轨迹预测时,用户除了需要掌握matlab的基本操作以外,更需要对卡尔曼滤波理论有着深刻的理解与应用能力,这样才能更好地利用卡尔曼滤波来实现目标轨迹的准确预测与跟踪,为实际应用提供更好的支持与保障。
卡尔曼姿态解算matlab程序

卡尔曼姿态解算matlab程序
【最新版】
目录
一、卡尔曼姿态解算概述
二、卡尔曼姿态解算的 MATLAB 程序
三、卡尔曼姿态解算的应用实例
四、总结
正文
一、卡尔曼姿态解算概述
卡尔曼姿态解算是一种常用于计算机视觉和机器人领域的算法,它可以通过一系列的测量和计算,估计出物体在三维空间中的位置和姿态。
这种算法的主要优点是能够处理噪声和数据缺失,并且具有较好的鲁棒性。
二、卡尔曼姿态解算的 MATLAB 程序
在 MATLAB 中,可以使用卡尔曼滤波器工具箱进行姿态解算。
具体的步骤如下:
1.首先,需要准备好需要解算的物体的测量数据,包括物体的边界框和每个像素的颜色信息。
2.然后,使用卡尔曼滤波器工具箱中的函数,初始化卡尔曼滤波器,并设置好状态变量和测量变量。
3.接下来,使用卡尔曼滤波器工具箱中的函数,对测量数据进行处理,得到物体的位置和姿态估计。
4.最后,使用卡尔曼滤波器工具箱中的函数,对估计的结果进行优化,得到最终的物体位置和姿态。
三、卡尔曼姿态解算的应用实例
卡尔曼姿态解算在许多领域都有广泛的应用,例如在计算机视觉中,可以使用卡尔曼姿态解算来估计图像中物体的位置和姿态;在机器人领域中,可以使用卡尔曼姿态解算来估计机器人手臂的位置和姿态,从而实现精确的控制。
四、总结
卡尔曼姿态解算是一种非常有用的算法,它可以通过一系列的测量和计算,估计出物体在三维空间中的位置和姿态。
在 MATLAB 中,可以使用卡尔曼滤波器工具箱进行姿态解算,具体的步骤包括初始化卡尔曼滤波器,处理测量数据,优化估计结果等。
卡尔曼滤波 正弦函数 matlab

一、介绍卡尔曼滤波卡尔曼滤波是一种用于估计系统状态的线性动态系统的方法。
它是由朗迪·卡尔曼在1960年提出的。
卡尔曼滤波是一种递归滤波器,通过使用过去时刻的状态和测量,以及系统动态的模型,来预测当前时刻的状态。
二、卡尔曼滤波原理1. 状态更新步骤:在状态更新步骤中,卡尔曼滤波使用系统的动态方程来预测下一个时刻的状态。
这一步骤包括预测状态、预测状态协方差和计算卡尔曼增益。
2. 测量更新步骤:在测量更新步骤中,卡尔曼滤波使用最新的测量值来修正之前的预测。
这一步骤包括计算测量预测、计算残差、计算卡尔曼增益和更新状态估计。
三、正弦函数及其在卡尔曼滤波中的应用正弦函数是一种周期性变化的函数,具有良好的数学性质和广泛的应用。
在卡尔曼滤波中,正弦函数可以用于模拟系统的动态特性,对系统的状态进行预测和更新。
四、matlab中的卡尔曼滤波实现matlab是一种用于科学计算和工程应用的高级技术计算语言和交互环境。
在matlab中,可以很方便地实现和应用卡尔曼滤波算法。
1. 使用matlab进行线性动态系统建模在matlab中,可以使用state-space模型来表示线性动态系统的状态空间方程。
通过定义系统的状态方程、测量方程、过程噪声和观测噪声,可以建立系统的状态空间模型。
2. 使用matlab实现卡尔曼滤波算法在matlab中,可以使用kalman滤波器函数来实现卡尔曼滤波算法。
首先需要定义系统的状态转移矩阵、测量矩阵、过程噪声协方差矩阵和观测噪声协方差矩阵。
然后利用kalman滤波器函数,输入系统模型和测量值,即可得到卡尔曼滤波器的输出。
3. 使用matlab对正弦函数进行卡尔曼滤波在matlab中,可以构建一个包含正弦函数的模拟系统,并对其进行卡尔曼滤波。
通过比较卡尔曼滤波的结果和真实正弦函数的值,可以评估卡尔曼滤波算法的性能。
五、结论卡尔曼滤波是一种用于估计系统状态的有效方法,在很多领域都有广泛的应用。
自适应扩展卡尔曼滤波matlab

自适应扩展卡尔曼滤波matlab自适应扩展卡尔曼滤波(Adaptive Extended Kalman Filter,AEKF)是一种用于非线性系统状态估计的滤波算法。
本文将介绍AEKF算法的原理、步骤和实现方法,并结合MATLAB 编写代码进行演示。
一、扩展卡尔曼滤波原理扩展卡尔曼滤波(Extended Kalman Filter,EKF)是一种用于非线性系统状态估计的滤波算法。
它通过使用线性化系统模型的方式将非线性系统转换为线性系统,在每个时间步骤中用线性卡尔曼滤波器进行状态估计。
然而,EKF仅限于具有凸多边形测量特性的问题,并且对线性化过程误差敏感。
为了解决这些问题,AEKF通过自适应更新协方差矩阵的方式提高了滤波器的性能。
AEKF通过测量残差的方差更新协方差矩阵,从而提高了滤波器对非线性系统的适应能力。
AEKF算法的步骤如下:1. 初始化状态向量和协方差矩阵。
2. 根据系统的非线性动力学方程和测量方程计算预测状态向量和协方差矩阵。
3. 计算测量残差,即测量值与预测值之间的差值。
4. 计算测量残差的方差。
5. 判断测量残差的方差是否超过预设阈值,如果超过,则更新协方差矩阵。
6. 利用更新后的协方差矩阵计算最优滤波增益。
7. 更新状态向量和协方差矩阵。
8. 返回第2步,进行下一次预测。
二、AEKF算法的MATLAB实现下面,我们将使用MATLAB编写AEKF算法的代码,并通过一个实例进行演示。
首先,定义非线性系统的动力学方程和测量方程。
在本例中,我们使用一个双摆系统作为非线性系统模型。
```matlabfunction x_next = nonlinear_dynamics(x_current, u)% Nonlinear system dynamicstheta1 = x_current(1);theta2 = x_current(2);d_theta1 = x_current(3);d_theta2 = x_current(4);g = 9.8; % Gravitational accelerationd_theta1_next = d_theta1 + dt * (-3*g*sin(theta1) - sin(theta1-theta2) ...+ 2*sin(theta1-theta2)*(d_theta2^2 + d_theta1^2*cos(theta1-theta2))) .../ (3 - cos(2*(theta1-theta2)));d_theta2_next = d_theta2 + dt * (2*sin(theta1-theta2)*(2*d_theta2^2 ...+ d_theta1^2*cos(theta1-theta2) + g*cos(theta1) +g*cos(theta1-theta2))) .../ (3 - cos(2*(theta1-theta2)));theta1_next = theta1 + dt * d_theta1_next;theta2_next = theta2 + dt * d_theta2_next;x_next = [theta1_next; theta2_next; d_theta1_next;d_theta2_next];endfunction y = measurement_model(x)% Measurement model, measure the angles of the double pendulumtheta1 = x(1);theta2 = x(2);y = [theta1; theta2];end```然后,定义AEKF算法的实现。
扩展卡尔曼滤波算法的matlab程序
clear allv=150; %%目标速度v_sensor=0;%%传感器速度t=1; %%扫描周期xradarpositon=0; %%传感器坐标yradarpositon=0; %%ppred=zeros(4,4);Pzz=zeros(2,2);Pxx=zeros(4,2);xpred=zeros(4,1);ypred=zeros(2,1);sumx=0;sumy=0;sumxukf=0;sumyukf=0;sumxekf=0;sumyekf=0; %%%统计的初值L=4;alpha=1;kalpha=0;belta=2;ramda=3-L;azimutherror=0.015; %%方位均方误差rangeerror=100; %%距离均方误差processnoise=1; %%过程噪声均方差tao=[t^3/3 t^2/2 0 0;t^2/2 t 0 0;0 0 t^3/3 t^2/2;0 0 t^2/2 t]; %% the input matrix of process G=[t^2/2 0t 00 t^2/20 t ];a=35*pi/180;a_v=5/100;a_sensor=45*pi/180;x(1)=8000; %%初始位置y(1)=12000;for i=1:200x(i+1)=x(i)+v*cos(a)*t;y(i+1)=y(i)+v*sin(a)*t;endfor i=1:200xradarpositon=0;yradarpositon=0;Zmeasure(1,i)=atan((y(i)-yradarpositon)/(x(i)-xradarpositon))+random('Normal',0,azimutherror,1,1); Zmeasure(2,i)=sqrt((y(i)-yradarpositon)^2+(x(i)-xradarpositon)^2)+random('Normal',0,rangeerror,1,1);xx(i)=Zmeasure(2,i)*cos(Zmeasure(1,i));%%观测值yy(i)=Zmeasure(2,i)*sin(Zmeasure(1,i));measureerror=[azimutherror^2 0;0 rangeerror^2];processerror=tao*processnoise;vNoise = size(processerror,1);wNoise = size(measureerror,1);A=[1 t 0 0;0 1 0 0;0 0 1 t;0 0 0 1];Anoise=size(A,1);for j=1:2*L+1Wm(j)=1/(2*(L+ramda));Wc(j)=1/(2*(L+ramda));endWm(1)=ramda/(L+ramda);Wc(1)=ramda/(L+ramda);%+1-alpha^2+belta; %%%权值if i==1xerror=rangeerror^2*cos(Zmeasure(1,i))^2+Zmeasure(2,i)^2*azimutherror^2*sin(Zmeasure(1,i))^2; yerror=rangeerror^2*sin(Zmeasure(1,i))^2+Zmeasure(2,i)^2*azimutherror^2*cos(Zmeasure(1,i))^2; xyerror=(rangeerror^2-Zmeasure(2,i)^2*azimutherror^2)*sin(Zmeasure(1,i))*cos(Zmeasure(1,i));P=[xerror xerror/t xyerror xyerror/t;xerror/t 2*xerror/(t^2) xyerror/t 2*xyerror/(t^2);xyerror xyerror/t yerror yerror/t;xyerror/t 2*xyerror/(t^2) yerror/t 2*yerror/(t^2)];xestimate=[Zmeasure(2,i)*cos(Zmeasure(1,i)) 0 Zmeasure(2,i)*sin(Zmeasure(1,i)) 0 ]'; endcho=(chol(P*(L+ramda)))';%for j=1:LxgamaP1(:,j)=xestimate+cho(:,j);xgamaP2(:,j)=xestimate-cho(:,j);endXsigma=[xestimate xgamaP1 xgamaP2];F=A;Xsigmapre=F*Xsigma;xpred=zeros(Anoise,1);for j=1:2*L+1xpred=xpred+Wm(j)*Xsigmapre(:,j);endNoise1=Anoise;ppred=zeros(Noise1,Noise1);for j=1:2*L+1ppred=ppred+Wc(j)*(Xsigmapre(:,j)-xpred)*(Xsigmapre(:,j)-xpred)';endppred=ppred+processerror;chor=(chol((L+ramda)*ppred))';for j=1:LXaugsigmaP1(:,j)=xpred+chor(:,j);XaugsigmaP2(:,j)=xpred-chor(:,j);endXaugsigma=[xpred XaugsigmaP1 XaugsigmaP2 ];for j=1:2*L+1Ysigmapre(1,j)=atan(Xaugsigma(3,j)/Xaugsigma(1,j)) ;Ysigmapre(2,j)=sqrt((Xaugsigma(1,j))^2+(Xaugsigma(3,j))^2);endypred=zeros(2,1);for j=1:2*L+1ypred=ypred+Wm(j)*Ysigmapre(:,j);endPzz=zeros(2,2);for j=1:2*L+1Pzz=Pzz+Wc(j)*(Ysigmapre(:,j)-ypred)*(Ysigmapre(:,j)-ypred)';endPzz=Pzz+measureerror;Pxy=zeros(Anoise,2);for j=1:2*L+1Pxy=Pxy+Wc(j)*(Xaugsigma(:,j)-xpred)*(Ysigmapre(:,j)-ypred)';endK=Pxy*inv(Pzz);xestimate=xpred+K*(Zmeasure(:,i)-ypred);P=ppred-K*Pzz*K';xukf(i)=xestimate(1,1);yukf(i)=xestimate(3,1); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%% EKF PRO%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%if i==1ekf_p=[xerror xerror/t xyerror xyerror/t;xerror/t 2*xerror/(t^2) xyerror/t 2*xyerror/(t^2);xyerror xyerror/t yerror yerror/t;xyerror/t 2*xyerror/(t^2) yerror/t 2*yerror/(t^2)];ekf_xestimate=[Zmeasure(2,i)*cos(Zmeasure(1,i)) 0 Zmeasure(2,i)*sin(Zmeasure(1,i)) 0 ]';ekf_xpred=ekf_xestimate;end;F=A;ekf_xpred=F*ekf_xestimate;ekf_ppred=F*ekf_p*F'+processerror;H=[-ekf_xpred(3)/(ekf_xpred(3)^2+ekf_xpred(1)^2) 0 ekf_xpred(1)/(ekf_xpred(3)^2+ekf_xpred(1)^2) 0;ekf_xpred(1)/sqrt(ekf_xpred(3)^2+ekf_xpred(1)^2) 0 ekf_xpred(3)/sqrt(ekf_xpred(3)^2+ekf_xpred(1)^2) 0];ekf_z(1,1)=atan(ekf_xpred(3)/ekf_xpred(1)) ;ekf_z(2,1)=sqrt((ekf_xpred(1))^2+(ekf_xpred(3))^2);PHHP=H*ekf_ppred*H'+measureerror;ekf_K=ekf_ppred*H'*inv(PHHP);ekf_p=(eye(L)-ekf_K*H)*ekf_ppred;ekf_xestimate=ekf_xpred+ekf_K*(Zmeasure(:,i)-ekf_z);traceekf(i)=trace(ekf_p);xekf(i)=ekf_xestimate(1,1);yekf(i)=ekf_xestimate(3,1);errorx(i)=xx(i)+xradarpositon-x(i);errory(i)=yy(i)+yradarpositon-y(i);ukferrorx(i)=xestimate(1)+xradarpositon-x(i);ukferrory(i)=xestimate(3)+yradarpositon-y(i);ekferrorx(i)=ekf_xestimate(1)+xradarpositon-x(i); ekferrory(i)=ekf_xestimate(3)+yradarpositon-y(i);aa(i)=xx(i)+xradarpositon-x(i);;bb(i)=yy(i)+yradarpositon-y(i);sumx=sumx+(errorx(i)^2);sumy=sumy+(errory(i)^2);sumxukf=sumxukf+(ukferrorx(i)^2);sumyukf=sumyukf+(ukferrory(i)^2);sumxekf=sumxekf+(ekferrorx(i)^2);sumyekf=sumyekf+(ekferrory(i)^2);mseerrorx(i)=sqrt(sumx/(i-1));%噪声的统计均方误差mseerrory(i)=sqrt(sumy/(i-1));mseerrorxukf(i)=sqrt(sumxukf/(i-1));%UKF的统计均方误差mseerroryukf(i)=sqrt(sumyukf/(i-1));mseerrorxekf(i)=sqrt(sumxekf/(i-1));%EKF的统计均方误差mseerroryekf(i)=sqrt(sumyekf/(i-1));endfigure(1);plot(mseerrorxukf,'r');hold on;plot(mseerrorxekf,'g');hold on;plot(mseerrorx,'.');hold on;ylabel('MSE of X axis','fontsize',15);xlabel('sample number','fontsize',15);legend('UKF','EKF','measurement error');figure(2)plot(mseerroryukf,'r');hold on;plot(mseerroryekf,'g');hold on;plot(mseerrory,'.');hold on;ylabel('MSE of Y axis','fontsize',15); xlabel('sample number','fontsize',15); legend('UKF','EKF','measurement error');figure(3)plot(x,y);hold on;plot(xekf,yekf,'g');hold on;plot(xukf,yukf,'r');hold on;plot(xx,yy,'m');ylabel(' X ','fontsize',15);xlabel('Y','fontsize',15);legend('TRUE','UKF','EKF','measurements');。
无损卡尔曼滤波UKF Matlab程序

ukf(无迹卡尔曼滤波)算法的matlab程序. function [x,P]=ukf(fstate,x,P,hmeas,z,Q,R)% UKF Unscented Kalman Filter for nonlinear dynamic systems% [x, P] = ukf(f,x,P,h,z,Q,R) returns state estimate, x and state covariance, P% for nonlinear dynamic system (for simplicity, noises are assumed as additive): % x_k+1 = f(x_k) + w_k% z_k = h(x_k) + v_k% where w ~ N(0,Q) meaning w is gaussian noise with covariance Q% v ~ N(0,R) meaning v is gaussian noise with covariance R% Inputs: f: function handle for f(x)% x: "a priori" state estimate% P: "a priori" estimated state covariance% h: fanction handle for h(x)% z: current measurement% Q: process noise covariance% R: measurement noise covariance% Output: x: "a posteriori" state estimate% P: "a posteriori" state covariance%% Example:%{n=3; %number of stateq=0.1; %std of processr=0.1; %std of measurementQ=q^2*eye(n); % covariance of processR=r^2; % covariance of measurementf=@(x)[x(2);x(3);0.05*x(1)*(x(2)+x(3))]; % nonlinear state equationsh=@(x)x(1); % measurement equations=[0;0;1]; % initial statex=s+q*randn(3,1); %initial state % initial state with noiseP = eye(n); % initial state covraianceN=20; % total dynamic stepsxV = zeros(n,N); %estmate % allocate memorysV = zeros(n,N); %actualzV = zeros(1,N);for k=1:Nz = h(s) + r*randn; % measurmentssV(:,k)= s; % save actual statezV(k) = z; % save measurment[x, P] = ukf(f,x,P,h,z,Q,R); % ekfxV(:,k) = x; % save estimates = f(s) + q*randn(3,1); % update processendfor k=1:3 % plot resultssubplot(3,1,k)plot(1:N, sV(k,:), '-', 1:N, xV(k,:), '--')end%}%% By Yi Cao at Cranfield University, 04/01/2008%L=numel(x); %numer of statesm=numel(z); %numer of measurementsalpha=1e-3; %default, tunableki=0; %default, tunablebeta=2; %default, tunablelambda=alpha^2*(L+ki)-L; %scaling factorc=L+lambda; %scaling factorWm=[lambda/c 0.5/c+zeros(1,2*L)]; %weights for meansWc=Wm;Wc(1)=Wc(1)+(1-alpha^2+beta); %weights for covariancec=sqrt(c);X=sigmas(x,P,c); %sigma points around x[x1,X1,P1,X2]=ut(fstate,X,Wm,Wc,L,Q); %unscented transformation of process % X1=sigmas(x1,P1,c); %sigma points around x1% X2=X1-x1(:,ones(1,size(X1,2))); %deviation of X1[z1,Z1,P2,Z2]=ut(hmeas,X1,Wm,Wc,m,R); %unscented transformation of measurmentsP12=X2*diag(Wc)*Z2'; %transformed cross-covarianceK=P12*inv(P2);x=x1+K*(z-z1); %state updateP=P1-K*P12'; %covariance updatefunction [y,Y,P,Y1]=ut(f,X,Wm,Wc,n,R)%Unscented Transformation%Input:% f: nonlinear map% X: sigma points% Wm: weights for mean% Wc: weights for covraiance% n: numer of outputs of f% R: additive covariance%Output:% y: transformed mean% Y: transformed smapling points% P: transformed covariance% Y1: transformed deviationsL=size(X,2);y=zeros(n,1);Y=zeros(n,L);for k=1:LY(:,k)=f(X(:,k));y=y+Wm(k)*Y(:,k);endY1=Y-y(:,ones(1,L));P=Y1*diag(Wc)*Y1'+R;function X=sigmas(x,P,c)%Sigma points around reference point%Inputs:% x: reference point% P: covariance% c: coefficient%Output:% X: Sigma pointsA = c*chol(P)';Y = x(:,ones(1,numel(x))); X = [x Y+A Y-A];。
卡尔曼滤波 matlab算法

卡尔曼滤波 matlab算法卡尔曼滤波是一种用于状态估计的数学方法,它通过将系统的动态模型和测量数据进行融合,可以有效地估计出系统的状态。
在Matlab中,实现卡尔曼滤波算法可以通过以下步骤进行:1. 确定系统的动态模型,首先需要将系统的动态模型表示为状态空间方程,包括状态转移矩阵、控制输入矩阵和过程噪声的协方差矩阵。
2. 初始化卡尔曼滤波器,在Matlab中,可以使用“kf = kalmanfilter(StateTransitionModel, MeasurementModel, ProcessNoise, MeasurementNoise, InitialState, 'State', InitialCovariance)”来初始化一个卡尔曼滤波器对象。
其中StateTransitionModel和MeasurementModel分别是状态转移模型和测量模型,ProcessNoise和MeasurementNoise是过程噪声和测量噪声的协方差矩阵,InitialState是初始状态向量,InitialCovariance是初始状态协方差矩阵。
3. 进行预测和更新,在每个时间步,通过调用“predict”和“correct”方法,可以对状态进行预测和更新,得到最优的状态估计值。
4. 实时应用,将测量数据输入到卡尔曼滤波器中,实时获取系统的状态估计值。
需要注意的是,在实际应用中,还需要考虑卡尔曼滤波器的参数调节、性能评估以及对不确定性的处理等问题。
此外,Matlab提供了丰富的工具箱和函数,可以帮助用户更便捷地实现和应用卡尔曼滤波算法。
总的来说,实现卡尔曼滤波算法需要对系统建模和Matlab编程有一定的了解和技能。
希望以上内容能够对你有所帮助。
卡尔曼滤波两例题含matlab程序

设高度的测量误差是均值为0、方差为1的高斯白噪声随机序列,该物体的初始高度0h 和速度0V 也是高斯分布的随机变量,且0000019001000,var 10/02Eh h m P EV m s V ⎡⎤⎡⎤⎡⎤⎡⎤===⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦。
试求该物体高度和速度随时间变化的最优估计。
(2/80.9s m g =) 解:1. 令()()()h k X k v k ⎡⎤=⎢⎥⎣⎦t=1 R (k )=1 Q(k)=0 根据离散时间卡尔曼滤波公式,则有: (1)(1,)()()X k k k X k U k φ+=++ (1)(1)(1)(1)Y k H k X k V k +=++++(1,)k k φ+= 11t -⎡⎤⎢⎥⎣⎦ ()U k = 20.5gt gt ⎡⎤-⎢⎥⎣⎦(1)H k +=[]10 滤波初值:^1900(0|0)(0)10X EX ⎡⎤==⎢⎥⎣⎦0100(0|0)var[(0)]2P X P ⎡⎤===⎢⎥⎣⎦一步预测:^^(1|)(1,)(|)()X k k k k X k k U k φ+=++ (1|)(1,)(|)(1,)TP k k k k P k k k k φφ+=++滤波增益:1(1)(1|)(1)[(1)(1|)(1)(1)]TTK k P k k H k H k P k k H k R k -+=+++++++ 滤波计算:^^^(1|1)(1|)(1)[(1)(1)(1|)]X k k X k k K k Y k H k X k k ++=++++-++ (1|1)[(1)(1)](1|)P k k I K k H k P k k ++=-+++ 2. 实验结果高度随时间变化估计速度随时间变化的最优估计高度协方差速度协方差从以上的结果,可以得到高度和速度的估计值,再通过所得到的高度协方差和速度协方差,可见用卡尔曼滤波法,虽然刚开始的初始高度协方差很大为100,但通过2步之后减小到不超过1,逐渐接近于0, 同样的速度协方差刚开始的时候也比较大,为2,但是通过5步之后迅速减小,到10步之后接近于0。
卡尔曼滤波的MATLAB实现演示教学
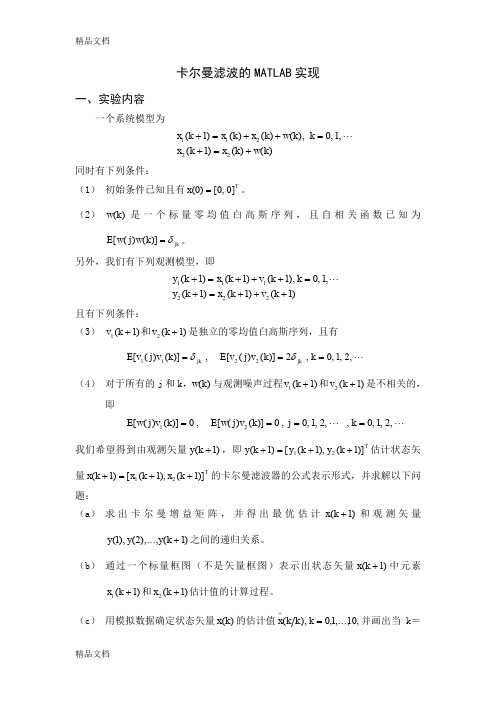
卡尔曼滤波的MATLAB 实现一、实验内容一个系统模型为 )()()1(,1,0),()()()1(22211k w k x k x k k w k x k x k x +=+=++=+同时有下列条件:(1) 初始条件已知且有T x ]0,0[)0(=。
(2) )(k w 是一个标量零均值白高斯序列,且自相关函数已知为jk k w j w E δ=)]()([。
另外,我们有下列观测模型,即 )1()1()1(,1,0),1()1()1(222111+++=+=+++=+k v k x k y k k v k x k y且有下列条件:(3) )1(1+k v 和)1(2+k v 是独立的零均值白高斯序列,且有 ,2,1,0,2)]()([,)]()([2211===k k v j v E k v j v E jk jk δδ(4) 对于所有的j 和k ,)(k w 与观测噪声过程)1(1+k v 和)1(2+k v 是不相关的,即,2,1,0,,2,1,0,0)]()([,0)]()([21====k j k v j w E k v j w E我们希望得到由观测矢量)1(+k y ,即T k y k y k y )]1(),1([)1(21++=+估计状态矢量T k x k x k x )]1(),1([)1(21++=+的卡尔曼滤波器的公式表示形式,并求解以下问题:(a ) 求出卡尔曼增益矩阵,并得出最优估计)1(+k x 和观测矢量)1(),...,2(),1(+k y y y 之间的递归关系。
(b ) 通过一个标量框图(不是矢量框图)表示出状态矢量)1(+k x 中元素)1(1+k x 和)1(2+k x 估计值的计算过程。
(c ) 用模拟数据确定状态矢量)(k x 的估计值,10,...,1,0),(=∧k k k x 并画出当k =0,1,…,10时)(1k k x ∧和)(2k k x ∧的图。
(整理)卡尔曼滤波简介及其算法MATLAB实现代码.
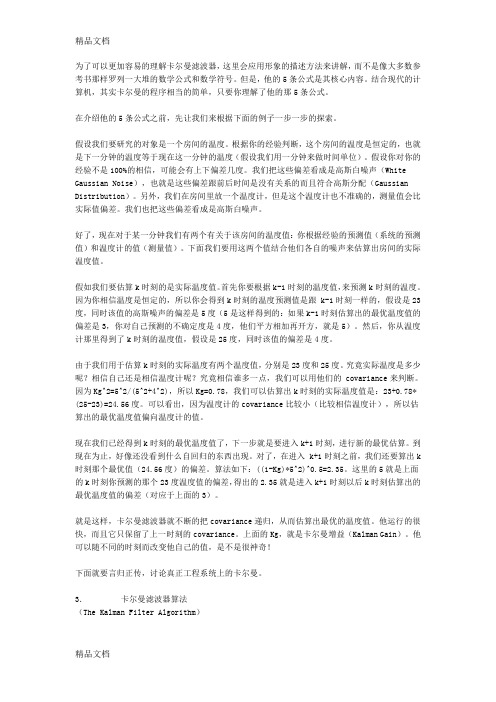
式(2)中,P(k|k-1)是X(k|k-1)对应的covariance,P(k-1|k-1)是X(k-1|k-1)对应的covariance,A’表示A的转置矩阵,Q是系统过程的covariance。式子1,2就是卡尔曼滤波器5个公式当中的前两个,也就是对系统的预测。
首先,我们先要引入一个离散控制过程的系统。该系统可用一个线性随机微分方程(Linear Stochastic Difference equation)来描述:
X(k)=A X(k-1)+B U(k)+W(k)
再加上系统的测量值:
Z(k)=H X(k)+V(k)
上两式子中,X(k)是k时刻的系统状态,U(k)是k时刻对系统的控制量。A和B是系统参数,对于多模型系统,他们为矩阵。Z(k)是k时刻的测量值,H是测量系统的参数,对于多测量系统,H为矩阵。W(k)和V(k)分别表示过程和测量的噪声。他们被假设成高斯白噪声(White Gaussian Noise),他们的covariance分别是Q,R(这里我们假设他们不随系统状态变化而变化)。
现在我们有了现在状态的预测结果,然后我们再收集现在状态的测量值。结合预测值和测量值,我们可以得到现在状态(k)的最优化估算值X(k|k):
X(k|k)= X(k|k-1)+Kg(k) (Z(k)-H X(k|
Kg(k)= P(k|k-1) H’ / (H P(k|k-1) H’ + R)………(4)
现在我们已经得到k时刻的最优温度值了,下一步就是要进入k+1时刻,进行新的最优估算。到现在为止,好像还没看到什么自回归的东西出现。对了,在进入k+1时刻之前,我们还要算出k时刻那个最优值(24.56度)的偏差。算法如下:((1-Kg)*5^2)^0.5=2.35。这里的5就是上面的k时刻你预测的那个23度温度值的偏差,得出的2.35就是进入k+1时刻以后k时刻估算出的最优温度值的偏差(对应于上面的3)。
matlab卡尔曼滤波函数

matlab卡尔曼滤波函数概述卡尔曼滤波是一种广泛应用于控制工程、信号处理、计算机视觉和机器人等领域的优化方法,其主要作用是对已知量和未知量的联合分布进行估计。
在matlab中,卡尔曼滤波函数已经被封装好,不需要用户手动构建卡尔曼滤波器。
本文主要介绍matlab中卡尔曼滤波函数的使用方法。
基础知识在介绍卡尔曼滤波函数之前,需要先了解一些与卡尔曼滤波相关的基础知识。
卡尔曼滤波的基本思想是利用系统的数学模型和观测量之间存在的关系来数学建模,采用贝叶斯估计方法,通过迭代逐步优化状态估计值和估计误差协方差矩阵。
卡尔曼滤波主要分为两个步骤:1. 预测在卡尔曼滤波中,预测过程可以通过系统模型对当前状态进行推测。
通常将这个过程称之为时间更新。
这个过程可以同步化到系统的时钟上,使其在系统中能够很好的集成。
2. 更新在得到新观测值之后,就需要将预测的状态值调整到观测值。
这个过程被称为测量更新。
这个过程可以将状态估计误差协方差矩阵逐渐调整为最小值。
卡尔曼滤波的数学公式,即状态估计公式,如下所示:$x_k=\hat{x}_{k|k-1}+K_k(z_k-H_{k}\hat{x}_{k|k-1})$$x_k$为当前状态的估计值;$\hat{x}_{k|k-1}$为预测状态的估计值;$K_k$为卡尔曼增益;$z_k$为当前状态的观测值;$H_{k}$为状态量和观测量的转换矩阵。
使用matlab卡尔曼滤波函数的步骤如下。
1. 定义系统模型在使用卡尔曼滤波函数进行数据处理之前,需要先定义系统模型。
这包括:状态转移模型观测模型过程噪声测量噪声在matlab中,通常使用StateSpace模型定义卡尔曼滤波系统模型。
2. 建立卡尔曼滤波器在定义好系统模型之后,需要调用kalman函数建立卡尔曼滤波器。
语法如下:[x,P]=kalman(sys,z)sys为matlab中定义的StateSpace模型;z为输入数据序列。
返回值x为状态估计值,P为估计值的协方差矩阵。
扩展卡尔曼滤波算法的matlab程序
clear all v=150; %% 目标速度v_sensor=0;%% 传感器速度t=1; %% 扫描周期xradarpositon=0; %% 传感器坐标yradarpositon=0; %%ppred=zeros(4,4);Pzz=zeros(2,2);Pxx=zeros(4,2); xpred=zeros(4,1); ypred=zeros(2,1);sumx=0; sumy=0;sumxukf=0;sumyukf=0; sumxekf=0;sumyekf=0; %%% 统计的初值L=4; alpha=1; kalpha=0; belta=2; ramda=3-L;azimutherror=0.015; %% 方位均方误差rangeerror=100; %% 距离均方误差processnoise=1; %% 过程噪声均方差tao=[t A3/3 22/2 0 0;22/2 tO 0;0 0 tA3/3 tA2/2;0 0 tA2/2 t]; %% the input matrix of processG=[tA2/2 0t 00 tA2/20 t ];a=35*pi/180; a_v=5/100;a_sensor=45*pi/180; x(1)=8000; %% 初始位置y(1)=12000;for i=1:200 x(i+1)=x(i)+v*cos(a)*t; y(i+1)=y(i)+v*sin(a)*t; end for i=1:200xradarpositon=0;yradarpositon=0;Zmeasure(1,i)=atan((y(i)-yradarpositon)/(x(i)-xradarpositon))+random('Normal',0,azimutherror ,1,1);Zmeasure(2,i)=sqrt((y(i)-yradarpositon)A2+(x(i)-xradarpositon)A2)+random('Normal',0,rangeerror ,1,1);xx(i)=Zmeasure(2,i)*cos(Zmeasure(1,i));%% 观测值yy(i)=Zmeasure(2,i)*sin(Zmeasure(1,i));measureerror=[azimutherror A2 0;0 rangeerror A2];processerror=tao*processnoise;vNoise = size(processerror ,1);wNoise = size(measureerror ,1);A=[1 t 0 0;0 1 0 0;0 0 1 t;0 0 0 1];Anoise=size(A,1);for j=1:2*L+1Wm(j)=1/(2*(L+ramda));Wc(j)=1/(2*(L+ramda));endWm(1)=ramda/(L+ramda);Wc(1)=ramda/(L+ramda);%+1-alphaA2+belta; %%% 权值if i==1xerror=rangeerrorA2*cos(Zmeasure(1,i))A2+Zmeasure(2,i)A2*azimutherrorA2*sin(Zmeasure(1,i))A2; yerror=rangeerrorA2*sin(Zmeasure(1,i))A2+Zmeasure(2,i)A2*azimutherrorA2*cos(Zmeasure(1,i))A2; xyerror=(rangeerrorA2-Zmeasure(2,i)A2*azimutherrorA2)*sin(Zmeasure(1,i))*cos(Zmeasure(1,i)); P=[xerror xerror/t xyerror xyerror/t;xerror/t 2*xerror/(tA2) xyerror/t 2*xyerror/(tA2);xyerror xyerror/t yerror yerror/t;xyerror/t 2*xyerror/(t A2) yerror/t 2*yerror/(t A2)];xestimate=[Zmeasure(2,i)*cos(Zmeasure(1,i)) 0 Zmeasure(2,i)*sin(Zmeasure(1,i)) 0 ]'; endcho=(chol(P*(L+ramda)))';%for j=1:LxgamaP1(:,j)=xestimate+cho(:,j);xgamaP2(:,j)=xestimate-cho(:,j);endXsigma=[xestimate xgamaP1 xgamaP2];F=A;Xsigmapre=F*Xsigma;xpred=zeros(Anoise,1);for j=1:2*L+1xpred=xpred+Wm(j)*Xsigmapre(:,j);endNoise1=Anoise;ppred=zeros(Noise1,Noise1);for j=1:2*L+1 ppred=ppred+Wc(j)*(Xsigmapre(:,j)-xpred)*(Xsigmapre(:,j)-xpred)';endppred=ppred+processerror;chor=(chol((L+ramda)*ppred))';for j=1:LXaugsigmaP1(:,j)=xpred+chor(:,j);XaugsigmaP2(:,j)=xpred-chor(:,j);endXaugsigma=[xpred XaugsigmaP1 XaugsigmaP2 ];for j=1:2*L+1Ysigmapre(1,j)=atan(Xaugsigma(3,j)/Xaugsigma(1,j)) ; Ysigmapre(2,j)=sqrt((Xaugsigma(1,j))A2+(Xaugsigma(3,j))A2); endypred=zeros(2,1);for j=1:2*L+1ypred=ypred+Wm(j)*Ysigmapre(:,j);endPzz=zeros(2,2);for j=1:2*L+1Pzz=Pzz+Wc(j)*(Ysigmapre(:,j)-ypred)*(Ysigmapre(:,j)-ypred)';endPzz=Pzz+measureerror;Pxy=zeros(Anoise,2);for j=1:2*L+1Pxy=Pxy+Wc(j)*(Xaugsigma(:,j)-xpred)*(Ysigmapre(:,j)-ypred)';endK=Pxy*inv(Pzz); xestimate=xpred+K*(Zmeasure(:,i)-ypred);P=ppred-K*Pzz*K';xukf(i)=xestimate(1,1);yukf(i)=xestimate(3,1); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%% EKF PRO%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%if i==1ekf_p=[xerror xerror/t xyerror xyerror/t;xerror/t 2*xerror/(t A2) xyerror/t 2*xyerror/(t A2);xyerror xyerror/t yerror yerror/t;xyerror/t 2*xyerror/(tA2) yerror/t 2*yerror/(tA2)];ekf_xestimate=[Zmeasure(2,i)*cos(Zmeasure(1,i)) 0 Zmeasure(2,i)*sin(Zmeasure(1,i)) 0 ]';ekf_xpred=ekf_xestimate;end;F=A;ekf_xpred=F*ekf_xestimate;ekf_ppred=F*ekf_p*F'+processerror;H=[-ekf_xpred(3)/(ekf_xpred(3)A2+ekf_xpred(1)A2) 0 ekf_xpred(1)/(ekf_xpred(3)A2+ekf_xpred(1)A2)0;ekf_xpred(1)/sqrt(ekf_xpred(3)A2+ekf_xpred(1)A2) 0ekf_xpred(3)/sqrt(ekf_xpred(3)A2+ekf_xpred(1)A2) 0];ekf_z(1,1)=atan(ekf_xpred(3)/ekf_xpred(1)) ;ekf_z(2,1)=sqrt((ekf_xpred(1))A2+(ekf_xpred(3))A2);PHHP=H*ekf_ppred*H'+measureerror;ekf_K=ekf_ppred*H'*inv(PHHP);ekf_p=(eye(L)-ekf_K*H)*ekf_ppred;ekf_xestimate=ekf_xpred+ekf_K*(Zmeasure(:,i)-ekf_z);traceekf(i)=trace(ekf_p);xekf(i)=ekf_xestimate(1,1);yekf(i)=ekf_xestimate(3,1);errorx(i)=xx(i)+xradarpositon-x(i);errory(i)=yy(i)+yradarpositon-y(i);ukferrorx(i)=xestimate(1)+xradarpositon-x(i); ukferrory(i)=xestimate(3)+yradarpositon-y(i);ekferrorx(i)=ekf_xestimate(1)+xradarpositon-x(i); ekferrory(i)=ekf_xestimate(3)+yradarpositon-y(i);aa(i)=xx(i)+xradarpositon-x(i);; bb(i)=yy(i)+yradarpositon-y(i);sumx=sumx+(errorx(iF2);sumy=sumy+(errory(i)A2); sumxukf=sumxukf+(ukferrorx(iF2); sumyukf=sumyukf+(ukferrory(i)A2); sumxekf=sumxekf+(ekferrorx(i)A2); sumyekf=sumyekf+(ekferrory(i)A2);mseerrorx(i)=sqrt(sumx/(i-1));% 噪声的统计均方误差mseerrory(i)=sqrt(sumy/(i-1));mseerrorxukf(i)=sqrt(sumxukf/(i-1));%UKF 的统计均方误差mseerroryukf(i)=sqrt(sumyukf/(i-1));mseerrorxekf(i)=sqrt(sumxekf/(i-1));%EKF 的统计均方误差mseerroryekf(i)=sqrt(sumyekf/(i-1));endfigure(1);plot(mseerrorxukf,'r');hold on;plot(mseerrorxekf,'g');hold on;plot(mseerrorx,'.');hold on; ylabel('MSE of X axis','fontsize',15); xlabel('sample number','fontsize',15);legend('UKF','EKF','measurement error');figure(2) plot(mseerroryukf,'r');hold on;plot(mseerroryekf,'g'); hold on;plot(mseerrory,'.');hold on; ylabel('MSE of Y axis','fontsize',15); xlabel('sample number','fontsize',15);legend('UKF','EKF','measurement error');figure(3) plot(x,y); hold on; plot(xekf,yekf,'g'); hold on; plot(xukf,yukf,'r'); hold on; plot(xx,yy,'m'); ylabel(' X ','fontsize',15); xlabel('Y','fontsize',15); legend('TRUE','UKF','EKF','measurements');。
卡尔曼滤波原理及应用matlab
卡尔曼滤波原理及应用matlab什么是卡尔曼滤波?卡尔曼滤波(Kalman Filter)是一种递归滤波算法,用于估计系统的状态变量,同时能够考虑到系统中的测量噪声和过程噪声。
它被广泛应用于信号处理、控制系统、导航系统等领域。
1. 卡尔曼滤波原理卡尔曼滤波的基本原理可以简单概括为:先预测系统的状态变量,再通过测量数据对预测结果进行校正,得到更准确的状态估计。
具体步骤如下:(1)初始化:设定系统的初始状态估计值和协方差矩阵。
(2)预测状态:基于系统的动态模型,通过前一时刻的状态估计值和控制输入(如果有),利用状态方程预测当前时刻的状态和协方差。
(3)状态更新:根据当前时刻的测量数据,通过测量方程计算状态的残差,然后利用卡尔曼增益对预测的状态估计进行校正,得到更新后的状态和协方差。
(4)返回第二步,重复进行预测和更新。
卡尔曼滤波的核心在于通过系统模型和测量数据不断进行预测和校正,利用预测的结果和测量数据之间的差异来修正状态估计,从而对真实状态进行有效的估计。
2. 卡尔曼滤波的应用卡尔曼滤波在实际应用中有广泛的领域,下面介绍一些常见的应用场景。
(1)信号处理:在信号处理领域,卡尔曼滤波可用于降噪、信号提取、信号预测等工作。
通过将测量噪声和过程噪声考虑进来,卡尔曼滤波能够对信号进行更精确的估计和分离。
(2)控制系统:在控制系统中,卡尔曼滤波可用于状态估计,即根据系统的输入和输出,通过滤波算法估计系统的状态变量。
这对于控制系统的稳定性和性能提升具有重要意义。
(3)导航系统:卡尔曼滤波在导航系统中被广泛应用。
由于导航系统通常包含多个传感器,每个传感器都有测量误差,卡尔曼滤波能够通过融合多个传感器的测量数据,获得更准确的位置和速度估计。
(4)图像处理:卡尔曼滤波也可用于图像处理中的目标跟踪和运动估计。
通过将目标的位置和速度作为状态变量,将图像的测量数据带入卡尔曼滤波算法,可以实现对目标运动的预测和跟踪。
3. 使用MATLAB实现卡尔曼滤波MATLAB是一种强大的数学建模和仿真工具,也可以用于实现卡尔曼滤波算法。
基于Matlab的卡尔曼滤波算法仿真

基于Matlab的卡尔曼滤波算法仿真1.卡尔曼滤波器原理卡尔曼滤波是解决以均方误差最小为准则的最佳线性滤波问题,它根据前一个估计值和最近一个观察数据来估计信号的当前值。
它是用状态方程和递推方法进行估计的,而它的解是以估计值(常常是状态变量的估计值)的形式给出其信号模型是从状态方程和量测方程得到的。
卡尔曼滤波中信号和噪声是用状态方程和测量方程来表示的。
因此设计卡尔曼滤波器要求已知状态方程和测量方程。
它不需要知道全部过去的数据,采用递推的方法计算,它既可以用于平稳和不平稳的随机过程,同时也可以应用解决非时变和时变系统,因而它比维纳过滤有更广泛的应用。
卡尔曼几个重要公式:ŝ(n|n) = a ŝ (n-1|n-1) + G n[x(n) – ac ŝ (n-1|n-1)] (1)P(n) = a2ξ(n-1) + Q (2)G n = (3)ξ(n) = = (1 – cG n)P(n) (4)这组方程的递推计算过程如图1所示。
图1. 卡尔曼滤波器递推运算流程图-卡尔曼滤波过程实际上是获取维纳解的递推运算过程,这一过程从某个初始状态启动,经过迭代运算,最终到达稳定状态,即维纳滤波状态。
递推计算按图1所示进行。
假设已经有了初始值ŝ(0|0)和ξ(0),这样便可由式(2)计算P(1),由式(3)计算G1,由式(4)计算ξ(1),由式(1)计算ŝ(1|1)。
ξ(1)和ŝ(1|1)便成为下一轮迭代运算的已知数据。
在递推运算过程中,随着迭代次数n的增加,ξ(n)将逐渐下降,知道最终趋近于某个稳定值ξ0。
这时ξ(n)= ξ(n - 1)= ξ0为求得这个稳定值,将式(3)和式(2)代入式(4),得到ξ02 +解此方程即可求出ξ0。
2.基于Matlab的卡尔曼滤波器的仿真Matlab代码如下:clearN=200;w(1)=0;x(1)=5;a=1;c=1;%过程噪声Q1=randn(1,N)*1;%测量噪声Q2=randn(1,N);%状态矩阵for k=2:N;x(k)=a*x(k-1)+Q1(k-1);endfor k=1:N;Y(k)=c*x(k)+Q2(k);endp(1)=10;s(1)=1;for t=2:N;Rww = cov(Q1(1:t));Rvv = cov(Q2(1:t));- p1(t)=a.^2*p(t-1)+Rww;%kalman 增益b(t)=c*p1(t)/(c.^2*p1(t)+Rvv);s(t)=a*s(t-1)+b(t)*(Y(t)-a*c*s(t-1));p(t)=p1(t)-c*b(t)*p1(t);endFontSize=14;LineWidth=3;figure();%画出温度计的测量值plot(Y,'k+');hold on;%画出最优估计值plot(s,'b-','LineWidth',LineWidth)hold on;%画出真实值plot(x,'g-','LineWidth',LineWidth);legend('观测值', '后验估计', '真实值');xl=xlabel('');yl=ylabel('');set(xl,'fontsize',FontSize);set(yl,'fontsize',FontSize);hold off;set(gca,'FontSize',FontSize);figure();valid_iter = [2:N];%画出最优估计值的方差plot(valid_iter,p([valid_iter]),'LineWidth',LineWidth);legend('后验估计的误差估计');xl=xlabel('');yl=ylabel('');set(xl,'fontsize',FontSize);set(yl,'fontsize',FontSize);set(gca,'FontSize',FontSize);-Matlab仿真结果如下:卡尔曼滤波的结果:估计的误差的方差:-卡尔曼滤波的实质是由测量值重构系统的状态向量。
卡尔曼滤波matlab代码

卡尔曼滤波matlab代码
卡尔曼滤波(Kalman Filter)是一种有效融合测量数据的算法,由德国工程师卡尔曼博士发明,能够处理从随机过程中获得的非完全信息,将历史数据和测量信息进行综合的面向状态的算法。
它利用模型估计和更新未知状态,以达到估计未知状态的目的。
步骤1:设定卡尔曼滤波器:卡尔曼滤波器是利用上一时刻状态估计结果和当前测量值来对当前状态继续估计,因此每次只需输入一个新的测量值,即可完成所有的风险估计。
步骤2:确定状态转移模型:卡尔曼滤波用于处理非完全信息,从未知状态开始,将先验状态估计与新数据进行融合,在此过程中,必须根据状态转移模型确定状态转移参数。
步骤3:建立测量模型:通过测量模型将状态变量转换为可度量的测量量,即各状态变量与其输出测量变量之间的函数关系。
步骤4:在滤波器中实现卡尔曼滤波:。
卡尔曼滤波入门、简介及其算法MATLAB实现代码
卡尔曼滤波入门:卡尔曼滤波是用来进行数据滤波用的,就是把含噪声的数据进行处理之后得出相对真值。
卡尔曼滤波也可进行系统辨识。
卡尔曼滤波是一种基于统计学理论的算法,可以用来对含噪声数据进行在线处理,对噪声有特殊要求,也可以通过状态变量的增广形式实现系统辨识。
用上一个状态和当前状态的测量值来估计当前状态,这是因为上一个状态估计此时状态时会有误差,而测量的当前状态时也有一个测量误差,所以要根据这两个误差重新估计一个最接近真实状态的值。
信号处理的实际问题,常常是要解决在噪声中提取信号的问题,因此,我们需要寻找一种所谓有最佳线性过滤特性的滤波器。
这种滤波器当信号与噪声同时输入时,在输出端能将信号尽可能精确地重现出来,而噪声却受到最大抑制。
维纳(Wiener)滤波与卡尔曼(Kalman)滤波就是用来解决这样一类从噪声中提取信号问题的一种过滤(或滤波)方法。
(1)过滤或滤波 - 从当前的和过去的观察值x(n),x(n-1),x(n-2),…估计当前的信号值称为过滤或滤波;(2)预测或外推 - 从过去的观察值,估计当前的或将来的信号值称为预测或外推; (3)平滑或内插 - 从过去的观察值,估计过去的信号值称为平滑或内插;因此,维纳过滤与卡尔曼过滤又常常被称为最佳线性过滤与预测或线性最优估计。
这里所谓“最佳”与“最优”是以最小均方误差为准则的。
维纳过滤与卡尔曼过滤都是解决最佳线性过滤和预测问题,并且都是以均方误差最小为准则的。
因此在平稳条件下,它们所得到的稳态结果是一致的。
然而,它们解决的方法有很大区别。
维纳过滤是根据全部过去的和当前的观察数据来估计信号的当前值,它的解是以均方误差最小条件下所得到的系统的传递函数H(z)或单位样本响应h(n)的形式给出的,因此更常称这种系统为最佳线性过滤器或滤波器。
而卡尔曼过滤是用前一个估计值和最近一个观察数据(它不需要全部过去的观察数据)来估计信号的当前值,它是用状态方程和递推的方法进行估计的,它的解是以估计值(常常是状态变量值)形式给出的。
信息工程 简易 卡尔曼滤波 MATLAB 实验报告

卡尔曼滤波器设计学姓班级:09030702学号:2007302176姓名:谢林设计时间:2010/12/20卡尔曼滤波器设计一、卡尔曼及卡尔曼滤波算法介绍1)卡尔曼鲁道夫·卡尔曼(Rudolf Emil Kalman),匈牙利裔美国数学家,1930年出生于匈牙利首都布达佩斯。
1953年于麻省理工学院获得电机工程学士,翌年硕士学位。
1957年于哥伦比亚大学获得博士学位。
1964年至1971年任职斯坦福大学。
1971年至1992年任佛罗里达大学数学系统理论中心(Center for Mathematical System Theory)主任。
1972起任瑞士苏黎世联邦理工学院数学系统理论中心主任直至退休。
先居住于苏黎世和佛罗里达。
2009年获美国国家科学奖章。
2)卡尔曼滤波卡尔曼滤波器是一个“optimal recursive data processing algorithm(最优化自回归数据处理算法)”。
对于解决很大部分的问题,他是最优,效率最高甚至是最有用的。
他的广泛应用已经超过30年,包括机器人导航,控制,传感器数据融合甚至在军事方面的雷达系统以及导弹追踪等等。
近年来更被应用于计算机图像处理,例如头脸识别,图像分割,图像边缘检测等等3 卡尔曼滤波器算法(The Kalman Filter Algorithm)在这一部分,我们就来描述源于Dr Kalman 的卡尔曼滤波器。
下面的描述,会涉及一些基本的概念知识,包括概率(Probability),随即变量(Random Variable),高斯或正态分配(Gaussian Distribution)还有State-space Model 等等。
但对于卡尔曼滤波器的详细证明,这里不能一一描述。
首先,我们先要引入一个离散控制过程的系统。
该系统可用一个线性随机微分方程(Linear Stochastic Difference equation)来描述:X(k)=A X(k-1)+B U(k)+W(k)再加上系统的测量值:Z(k)=H X(k)+V(k)上两式子中,X(k)是k时刻的系统状态,U(k)是k时刻对系统的控制量。
卡尔曼滤波简介及其算法实现代码(C++_C_MATLAB)

卡尔曼滤波简介及其算法实现代码(C++/C/MATLAB)卡尔曼滤波器简介近来发现有些问题很多人都很感兴趣。
所以在这里希望能尽自己能力跟大家讨论一些力所能及的算法。
现在先讨论一下卡尔曼滤波器,如果时间和能力允许,我还希望能够写写其他的算法,例如遗传算法,傅立叶变换,数字滤波,神经网络,图像处理等等。
因为这里不能写复杂的数学公式,所以也只能形象的描述。
希望如果哪位是这方面的专家,欢迎讨论更正。
卡尔曼滤波器– Kalman Filter1.什么是卡尔曼滤波器(What is the Kalman Filter?)在学习卡尔曼滤波器之前,首先看看为什么叫“卡尔曼”。
跟其他著名的理论(例如傅立叶变换,泰勒级数等等)一样,卡尔曼也是一个人的名字,而跟他们不同的是,他是个现代人!卡尔曼全名Rudolf Emil Kalman,匈牙利数学家,1930年出生于匈牙利首都布达佩斯。
1953,1954年于麻省理工学院分别获得电机工程学士及硕士学位。
1957年于哥伦比亚大学获得博士学位。
我们现在要学习的卡尔曼滤波器,正是源于他的博士论文和1960年发表的论文《A New Approach to Linear Filtering and Prediction Problems》(线性滤波与预测问题的新方法)。
如果对这编论文有兴趣,可以到这里的地址下载:/~welch/media/pdf/Kalman1960.pdf。
简单来说,卡尔曼滤波器是一个“optimal recursive data processing algorithm(最优化自回归数据处理算法)”。
对于解决很大部分的问题,他是最优,效率最高甚至是最有用的。
他的广泛应用已经超过30年,包括机器人导航,控制,传感器数据融合甚至在军事方面的雷达系统以及导弹追踪等等。
近年来更被应用于计算机图像处理,例如头脸识别,图像分割,图像边缘检测等等。
2.卡尔曼滤波器的介绍(Introduction to the Kalman Filter)为了可以更加容易的理解卡尔曼滤波器,这里会应用形象的描述方法来讲解,而不是像大多数参考书那样罗列一大堆的数学公式和数学符号。
卡尔曼滤波器matlab代码
卡尔曼滤波器matlab代码卡尔曼滤波器是一种常用的状态估计算法,它能够根据系统的状态方程和测量方程,以及预测的误差和测量的误差,计算出最优的状态估计值和误差协方差矩阵,从而提高系统的精度和鲁棒性。
以下是卡尔曼滤波器的matlab代码:% 系统模型:% x(k) = A * x(k-1) + B * u(k) + w(k)% y(k) = H * x(k) + v(k)% 初始化模型参数:% 状态转移矩阵:A = [1, 1; 0, 1];% 控制输入矩阵:B = [0.5; 1];% 系统噪声方差:Q = [0.01, 0; 0, 0.1];% 测量噪声方差:R = 1;% 观测矩阵:H = [1, 0];% 初始化状态向量和协方差矩阵:x0 = [0; 0];P0 = [1, 0; 0, 1];% 设置时间和增量:dt = 0.1;t = 0:dt:10;u = sin(t);% 初始化输出向量和卡尔曼增益矩阵:x = zeros(2,length(t));y = zeros(1,length(t));K = zeros(2,length(t));% 执行卡尔曼滤波算法:x(:,1) = x0;for k = 2:length(t)% 预测状态和协方差:x_pre = A * x(:,k-1) + B * u(k-1);P_pre = A * P0 * A' + Q;% 计算卡尔曼增益:K(:,k) = P_pre * H' / (H * P_pre * H' + R);% 更新状态和协方差:x(:,k) = x_pre + K(:,k) * (y(k-1) - H * x_pre); P0 = (eye(2) - K(:,k) * H) * P_pre;% 计算输出:y(k) = H * x(:,k);end% 绘制结果:subplot(2,1,1)plot(t,x(1,:),'r',t,x(2,:),'b')legend('位置','速度')title('状态估计')subplot(2,1,2)plot(t,y,'g',t,u,'m')legend('测量值','控制输入')title('卡尔曼滤波')。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
% e.g., x(:,t) = E[X(:,t) | y(:,1:t), u(:, 1:t)]
% If a model sequence is specified, we also condition on
% it:如果指定了t时刻的模型序列,则对应的状态为
% int_V-初始的状态协方差
% Optional inputs(可选择的输入)
% ‘model’-model(t)=m means use params from model m at time t[ones(1,T)]
% in this case,all the above matrices take an additional final dimension
u = [];
B = [];
ndx = [];
args = varargin;
nargs = length(args);
for i=1:2:nargs
switch args
case 'model', model = args{i+1};
case 'u', u = args{i+1};
% Klanman filter
% [x,V,VV,loglik]=kalman_filter(y,A,C,Q,R,int_x,int_V,...)
% Inputs(输入)
% y(:,t)-t时刻的观测量
% A-系统矩阵
% C-量测矩阵
% Q-系统噪声协方差
% R-量测噪声协方差
% int_x-初始状态向量
[x(i,t), smallV, LL, VV(i,i,t)] = ...
kalman_update(A(i,i,m), C(:,i,m), Q(i,i,m), R(:,:,m), y(:,t), prevx(i), prevVsmall, ...
'initial', initial, 'u', u(:,t), 'B', B(i,:,m));
% 'B'-B(:,:,m) the input regression matrix for model m(B( :,m)是输入回归矩阵)
% Outputs(where X is the hidden state being estimated)(与输入对应的输出)
% x(:,t)=E[X(:,t)/y(:,1:t)] 已知t时刻和t时刻以前的量测值对x(t)的最小均方误差估计,相当于x(k/k)
function[x,V,VV,loglik]=kalman_filter(y,A,C,Q,R,init_x,init_V,varargin)
% varargin变长度输入宗量:在matlab中varargin提供了一种函数可变参数列表机制。就是说,
% 使用了“可变参数列表机制”的函数允许调用者调用该函数时根据需要来改变输入参数的个数。
% i.e. A(:,:,m),C(:,:,m),Q(:,:,m),R(:,:,m)
% However,int_x and int_V are independent of model(1)
% 'u'-u(:,t) the control signal at time t[[]](u(:,t)是t时刻控制输入信号)
case 'B', B = args{i+1};
case 'ndx', ndx = args{i+1};
otherwise, error(['unrecognized argument ' args])
end
end
x = zeros(ss, T);
V = zeros(ss, ss, T);
% V(:,:,t)=Cov[X(:,t)/y(:,1:t)] 相当于P(k/k)
% VV(:,:,t)=Cov[X(:,t),x(:,t-1)/y(:,1:t)] t>=2
% loglik=sum{t=1}^T log P(y(:,t))
% If an input signal is specified, we also condition on
% e.g., x(:,t) = E[X(:,t) | y(:,1:t), u(:, 1:t), m(1:t)]
[,T]= size(y);
ss = size(A,1); % size of state space
% set default params
model = ones(1,T); %产生1*T的全1数组
else
prevx = x(:,t-1);
prevV = V(:,:,t-1);
initial = 0;
end
if isempty(u)
[x(:,t), V(:,:,t), LL, VV(:,:,t)] = ...
kalman_update(A(:,:,m), C(:,:,m), Q(:,:,m), R(:,:,m), y(:,t), prevx, prevV, 'initial', initial);
VV = zeros(ss, ss, T);
loglik = 0;
for t=1:T
m = model(t);
if t==1
%prevx = init_x(:,m);
%prevV = init_V(:,:,m);
prevx = init_x;
prevV = init_V;
initial = 1;
else
if isempty(ndx)
[x(:,t), V(:,:,t), LL, VV(:,:,t)] = ...
kalman_update(A(:,:,m), C(:,:,m), Q(:,:,m), R(:,:,m), y(:,t), prevx, prevV, ...
'initial', initial, 'u', u(:,t), 'B', B(:ห้องสมุดไป่ตู้:,m));
else
i = ndx;
% copy over all elements; only some will get updated
x(:,t) = prevx;
prevP = inv(prevV);
prevPsmall = prevP(i,i);
prevVsmall = inv(prevPsmall);
smallP = inv(smallV);
prevP(i,i) = smallP;
V(:,:,t) = inv(prevP);
end
end
loglik = loglik + LL;
end