矩阵及矩阵运算坐标变换
齐次坐标和矩阵变换
齐次坐标和矩阵变换⼀直对齐次坐标这个概念的理解不够彻底,只见⼤部分的书中说道“齐次坐标在仿射变换中⾮常的⽅便”,然后就没有了后⽂,今天在⼀个叫做“三百年重⽣”的博客上看到⼀篇关于透视投影变换的探讨的⽂章,其中有对齐次坐标有⾮常精辟的说明,特别是针对这样⼀句话进⾏了有⼒的证明:“齐次坐标表⽰是计算机图形学的重要⼿段之⼀,它既能够⽤来明确区分向量和点,同时也更易⽤于进⾏仿射(线性)⼏何变换。
”—— F.S. Hill, JR。
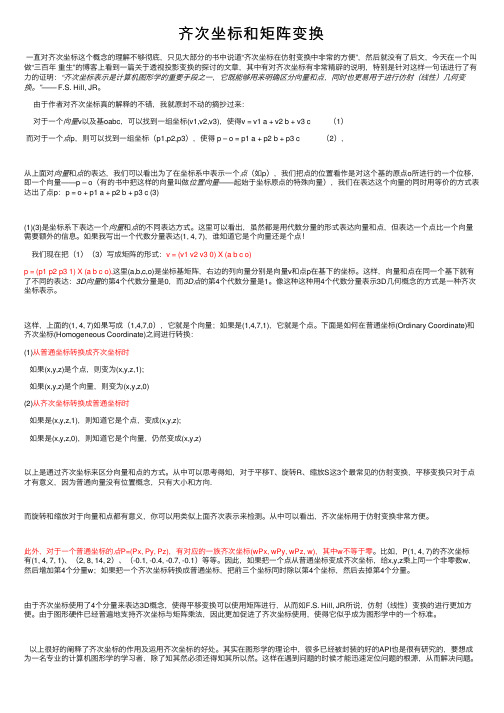
由于作者对齐次坐标真的解释的不错,我就原封不动的摘抄过来:对于⼀个向量v以及基oabc,可以找到⼀组坐标(v1,v2,v3),使得v = v1 a + v2 b + v3 c (1)⽽对于⼀个点p,则可以找到⼀组坐标(p1,p2,p3),使得 p – o = p1 a + p2 b + p3 c (2),从上⾯对向量和点的表达,我们可以看出为了在坐标系中表⽰⼀个点(如p),我们把点的位置看作是对这个基的原点o所进⾏的⼀个位移,即⼀个向量——p – o(有的书中把这样的向量叫做位置向量——起始于坐标原点的特殊向量),我们在表达这个向量的同时⽤等价的⽅式表达出了点p:p = o + p1 a + p2 b + p3 c (3)(1)(3)是坐标系下表达⼀个向量和点的不同表达⽅式。
这⾥可以看出,虽然都是⽤代数分量的形式表达向量和点,但表达⼀个点⽐⼀个向量需要额外的信息。
如果我写出⼀个代数分量表达(1, 4, 7),谁知道它是个向量还是个点!我们现在把(1)(3)写成矩阵的形式:v = (v1 v2 v3 0) X (a b c o)p = (p1 p2 p3 1) X (a b c o),这⾥(a,b,c,o)是坐标基矩阵,右边的列向量分别是向量v和点p在基下的坐标。
这样,向量和点在同⼀个基下就有了不同的表达:3D向量的第4个代数分量是0,⽽3D点的第4个代数分量是1。
像这种这种⽤4个代数分量表⽰3D⼏何概念的⽅式是⼀种齐次坐标表⽰。
ue 矩阵 切换坐标系
ue 矩阵切换坐标系UE4矩阵——切换坐标系概述:在UE4中,矩阵是一种被广泛应用于坐标系变换和几何变换的数学工具。
在游戏开发中,我们经常需要进行不同坐标系之间的转换,比如从世界坐标系到局部坐标系的转换,或者从局部坐标系到相机视图空间的转换。
本文将介绍UE4中的矩阵及其使用方法,以及如何使用矩阵来进行不同坐标系之间的切换。
1. 了解矩阵矩阵是一个二维数组,由若干个行和列组成。
在UE4中,常用的矩阵类型有四种:FMatrix、FMatrix2x2、FMatrix3x3和FMatrix4x4。
其中,FMatrix 是最常用的类型,用于进行四维空间的变换。
FMatrix2x2、FMatrix3x3和FMatrix4x4分别用于进行二维、三维和四维空间的变换。
在UE4中,矩阵使用列主序(column major)存储,即矩阵的每一列依次存储在内存中。
2. 矩阵的创建和使用在UE4中,可以使用FMatrix结构体来创建和操作矩阵。
下面是一个创建单位矩阵的示例:FMatrix Matrix = FMatrix::Identity;这样就创建了一个单位矩阵,并将其赋值给Matrix。
接下来,可以通过各种方法来修改和使用矩阵,比如平移、旋转和缩放等操作。
下面是几个常用的矩阵操作方法:- FMatrix::Translation(const FVector& InTranslation):平移矩阵,将矩阵的最后一列设置为平移向量。
- FMatrix::RotationX(float Angle):绕X轴旋转矩阵,将矩阵的第一列设置为旋转后的X轴。
- FMatrix::Scale3D(const FVector& InScale):缩放矩阵,将矩阵的对角元素设置为缩放向量。
3. 坐标系变换在UE4中,坐标系变换可以通过矩阵相乘的方式实现。
当需要将一个点从一个坐标系转换到另一个坐标系时,可以使用两个矩阵相乘的方式来进行变换。
坐标系转换矩阵

坐标系转换矩阵1. 介绍坐标系转换矩阵是数学中一种常用的工具,用于将一个坐标系中的点转换到另一个坐标系中。
在二维和三维空间中,坐标系转换矩阵可以表示为一个矩阵,通过乘法运算将原始坐标转换为目标坐标。
坐标系转换矩阵在计算机图形学、机器人学、物体定位以及航空航天等领域具有广泛的应用。
2. 二维坐标系转换矩阵2.1 平移矩阵平移矩阵用于将一个点在二维平面上沿 x 轴和 y 轴方向移动一定的距离。
平移矩阵可以表示为:[1 0 dx][0 1 dy][0 0 1 ]其中 dx 和 dy 分别表示在 x 轴和 y 轴上的平移距离。
通过乘法运算,可以将原始点的坐标 (x, y) 转换为移动后的坐标 (x+dx, y+dy)。
2.2 缩放矩阵缩放矩阵用于将一个点在二维平面上沿 x 轴和 y 轴方向进行放大或缩小。
缩放矩阵可以表示为:[sx 0 0][0 sy 0][0 0 1]其中 sx 和 sy 分别表示在 x 轴和 y 轴上的缩放比例。
通过乘法运算,可以将原始点的坐标 (x, y) 转换为缩放后的坐标 (sx x, sy y)。
2.3 旋转矩阵旋转矩阵用于将一个点在二维平面上绕原点进行旋转。
旋转矩阵可以表示为:[cosθ -sinθ 0][sinθ cosθ 0][0 0 1]其中θ 表示旋转角度。
通过乘法运算,可以将原始点的坐标 (x, y) 转换为绕原点旋转后的坐标 (x cosθ - y sinθ, x sinθ + y cosθ)。
2.4 总体转换矩阵总体转换矩阵可以通过平移、缩放和旋转矩阵的乘法运算得到。
假设需要将一个点从坐标系 A 转换到坐标系 B,首先可以将点的坐标通过平移矩阵从坐标系 A 转换到原点所在的坐标系,然后通过旋转矩阵将点的坐标围绕原点进行旋转,最后通过缩放矩阵将点的坐标进行放大或缩小,得到在坐标系 B 中的新坐标。
3. 三维坐标系转换矩阵三维坐标系转换矩阵与二维类似,只是需要增加一维。
旋转矩阵和坐标变换矩阵
旋转矩阵和坐标变换矩阵旋转矩阵和坐标变换矩阵,这可真是个有趣的话题!想象一下,一个小球在平面上转来转去,像是在跳舞一样。
旋转矩阵就像是这个小球的舞伴,帮它在空间中旋转。
说到旋转,大家应该都知道,有时候生活也需要转个弯,看看不同的风景,对吧?旋转矩阵其实就是一种数学工具,简单来说,它能把一个点的位置通过旋转的方式转换成另一个点的位置。
想象一下你在滑冰,优雅地转身,旋转矩阵就是你优雅转身的秘诀。
通过旋转角度,能让你在不同的位置看到不同的风景,哎呀,真是妙不可言!而坐标变换矩阵则更进一步,它可以把我们心爱的点,像一个小球,放到更高的地方,或者更远的地方,甚至变得更大或更小,就像魔法一样。
在数学的世界里,旋转矩阵和坐标变换矩阵就像两个老朋友,他们一起合作,让我们在各种场景中移动。
举个例子,想象你在玩一个游戏,角色需要从一个地方移动到另一个地方。
这时候,坐标变换矩阵就出场了,它把角色的坐标从一个点变换到另一个点,就像你换了个位置,继续探索新的领域。
说到这里,有没有觉得这些矩阵像极了我们生活中的那些选择?有时候我们也需要选择不同的方向,去体验新的事物。
比如,你本来在家里舒服地追剧,突然觉得无聊了,就决定去外面散步,顺便去看看最近开了什么新店。
生活中的这种变化就像矩阵的变换,一下子让你发现了不一样的自己,真是人生的调味品!旋转矩阵和坐标变换矩阵还有一个共同点,就是它们的运算规则。
你可以想象成是在做一个拼图游戏,把不同的图形拼合在一起。
通过简单的矩阵运算,你可以得到新的图形,新的坐标,仿佛让生活充满了惊喜。
在数学的世界里,这些运算就像调料,让你的菜肴更加美味。
我记得有一次,我在图书馆看到一个关于旋转矩阵的书,里面有个例子特别有意思。
一个小车在环形轨道上转圈,利用旋转矩阵可以很简单地计算出车子在不同时间点的位置。
想象一下,小车转呀转,仿佛在玩追逐游戏。
生活中也是如此,有时候我们在忙碌中不妨停下来,看看周围的变化,享受当下的乐趣。
坐标变换的矩阵实现
坐标变换的矩阵实现坐标变换是计算机图形学中的重要概念,它用于描述如何将一个坐标系中的点或向量转换到另一个坐标系中。
常见的坐标变换包括平移、旋转、缩放和剪切等操作。
矩阵是一种常用的表示方法,通过矩阵乘法来实现坐标变换。
在二维坐标中,一个点可以用一个二维向量表示,例如在笛卡尔坐标系中,点P的坐标表示为(Px,Py)。
为了实现坐标变换,我们可以用一个3x3的矩阵来表示,即变换矩阵。
这个矩阵中的元素对应于平移、旋转和缩放的参数。
以下是常见坐标变换的矩阵表示和实现方法:1.平移变换:平移变换表示将坐标系中的点沿着指定的方向移动一定的距离。
平移变换矩阵如下:[Tx][100][Ty]x[010][1][TxTy1]其中Tx和Ty分别是平移的距离。
假设有一个点P,通过平移变换矩阵可以得到新的点P',其坐标为(Px+Tx,Py+Ty)。
2.旋转变换:旋转变换表示将坐标系中的点围绕原点旋转一定角度。
旋转变换矩阵如下:[cosθ -sinθ 0][sinθ cosθ 0][001]其中θ表示旋转的角度。
假设有一个点P(x,y),通过旋转变换矩阵可以得到新的点P',其坐标为:Px' = x * cosθ - y * sinθPy' = x * sinθ + y * cosθ3.缩放变换:缩放变换表示将坐标系中的点沿着x轴和y轴的方向进行缩放。
缩放变换矩阵如下:[Sx00][0Sy0][001]其中Sx和Sy分别表示在x轴和y轴上的缩放比例。
假设有一个点P(x,y),通过缩放变换矩阵可以得到新的点P',其坐标为(Px*Sx,Py*Sy)。
4.剪切变换:剪切变换表示通过改变坐标系中点的坐标,使之按照指定的方式进行形变。
常见的剪切变换包括平行于x轴和y轴的剪切。
剪切变换矩阵如下:[1 Shx 0][Shy 1 0][001]其中Shx表示沿x轴的剪切比例,Shy表示沿y轴的剪切比例。
矩阵的运算及其运算规则

矩阵基本运算及应用令狐采学201700060牛晨晖在数学中,矩阵是一个按照长方阵列排列的复数或实数集合。
矩阵是高等代数学中的常见工具,也常见于统计分析等应用数学学科中。
在物理学中,矩阵于电路学、力学、光学和量子物理中都有应用;计算机科学中,三维动画制作也需要用到矩阵。
矩阵的运算是数值分析领域的重要问题。
将矩阵分解为简单矩阵的组合可以在理论和实际应用上简化矩阵的运算。
在电力系统方面,矩阵知识已有广泛深入的应用,本文将在介绍矩阵基本运算和运算规则的基础上,简要介绍其在电力系统新能源领域建模方面的应用情况,并展望随机矩阵理论等相关知识与人工智能电力系统的紧密结合。
1矩阵的运算及其运算规则1.1矩阵的加法与减法1.1.1运算规则设矩阵,,则简言之,两个矩阵相加减,即它们相同位置的元素相加减!注意:只有对于两个行数、列数分别相等的矩阵(即同型矩阵),加减法运算才有意义,即加减运算是可行的.1.1.2运算性质满足交换律和结合律交换律;结合律.1.2矩阵与数的乘法1.2.1运算规则数乘矩阵A,就是将数乘矩阵A中的每一个元素,记为或.特别地,称称为的负矩阵.1.2.2运算性质满足结合律和分配律结合律:(λμ)A=λ(μA);(λ+μ)A =λA+μA.分配律:λ(A+B)=λA+λB.1.2.3典型举例已知两个矩阵满足矩阵方程,求未知矩阵.解由已知条件知1.3矩阵与矩阵的乘法1.3.1运算规则设,,则A与B的乘积是这样一个矩阵:(1) 行数与(左矩阵)A相同,列数与(右矩阵)B相同,即.(2) C的第行第列的元素由A的第行元素与B的第列元素对应相乘,再取乘积之和.1.3.2典型例题设矩阵计算解是的矩阵.设它为可得结论1:只有在下列情况下,两个矩阵的乘法才有意义,或说乘法运算是可行的:左矩阵的列数=右矩阵的行数;结论2在矩阵的乘法中,必须注意相乘的顺序.即使在与均有意义时,也未必有=成立.可见矩阵乘法不满足交换律;结论3方阵A和它同阶的单位阵作乘积,结果仍为A ,即.1.3.3运算性质(假设运算都是可行的)(1)结合律.(2)分配律(左分配律);(右分配律).(3).1.3.4方阵的幂定义:设A 是方阵,是一个正整数,规定,显然,记号表示个A的连乘积.1.4矩阵的转置1.4.1定义定义:将矩阵A的行换成同序号的列所得到的新矩阵称为矩阵A 的转置矩阵,记作或.例如,矩阵的转置矩阵为.1.4.2运算性质(假设运算都是可行的)(1)(2)(3)(4),是常数.1.4.3典型例题利用矩阵验证运算性质:解;而所以.定义:如果方阵满足,即,则称A为对称矩阵.对称矩阵的特点是:它的元素以主对角线为对称轴对应相等.1.5方阵的行列式1.5.1定义定义:由方阵A的元素所构成的行列式(各元素的位置不变),称为方阵A的行列式,记作或.1.5.2运算性质(1) (行列式的性质)(2) ,特别地:(3) (是常数,A的阶数为n)思考:设A为阶方阵,那么的行列式与A 的行列式之间的关系为什么不是,而是?不妨自行设计一个二阶方阵,计算一下和.例如,则.于是,而2光伏逆变器的建模光伏并网逆变器是将光伏组件输出的直流电转化为符合电网要求的交流点再输入电网的关键设备,是光伏系统并网环节中能量转换与控制的核心。
2 矩阵的运算
(3 ) 矩阵可交换的 定义4: A 与 B, 若有 AB BA, 则称A与B是可交换的
例5
a b 解: 设A与B可交换,则B应是2阶方阵,不妨记 B c d 由 AB BA 即有
1 0 a b a b 1 0 1 1 c d c d 1 1
x1 x 2 x3 x4
(三) 矩阵乘法运算律 1结合律
(AB)C A (BC)
(1)结合律
k ( AB ) (kA) B A(kB), k R
0 A E ,规定
(2)方阵 A 的 m 次幂, 记为 Am 定义为
m Am AA A
1 2 A 0 1
1 x1 x2 T 0 1 0 ,X , X x1 , x2 , x3 , x4 , x3 1 1 3 0 3 2 x4 2 0
验证 注
f ( x1, x2 , x3 , x4 ) X AX
T 2 x f ( x , x , x , x ) 且 中 a 的系数, A 是对称矩阵, ii 是 1 2 3 4 i
aij a ji i j 是 f ( x1, x2 , x3 , x4 ) 中 xi x j 系数的一半。
解
1 2 T X AX x1 , x2 , x3 , x4 0 1
( A B)( A B) A BA AB B A B
2 2
2
2
( A B) A AB BA B A 2 AB B
2 2 2
2
2
但
( A E)( A E) A2 EA AE E 2 A2 E 2 ( A E)2 A2 EA AE E 2 A2 2 A E 2
矩阵坐标变换公式

矩阵坐标变换公式矩阵坐标变换是一种重要的数学概念,它可以将一个坐标系统中的点映射到另一个坐标系统中。
这种变换在计算机图形学中尤为重要,因为它可以帮助我们更加方便地处理图形对象的位置、方向和大小等属性。
在矩阵坐标变换中,我们通常会使用一个矩阵来代表变换操作。
这个矩阵可以用来对一个点或向量进行变换,具体的操作方式包括平移、旋转、缩放、扭曲等。
假设我们要对一个二维坐标系中的点进行变换,这个点的坐标为 (x, y)。
我们可以用一个列向量表示这个点的坐标,即:p = [x][y]接下来,我们就可以对这个列向量进行变换。
假设我们有一个2x2 的矩阵 A,它代表一个变换操作。
我们可以使用下面的公式计算变换后的坐标:p' = A * p其中,p' 是变换后的点的坐标,也是一个列向量,A 是变换矩阵,p 是原始点的列向量。
这个公式可以看作是将列向量 p 做矩阵乘法 A * p 的运算,得到变换后的列向量 p'。
在对点进行变换时,我们经常需要用到的变换矩阵包括平移、旋转和缩放矩阵。
这些矩阵的定义如下:1. 平移矩阵:在二维坐标系中,平移矩阵的形式如下:T = [1 0 tx][0 1 ty][0 0 1]其中,tx 和 ty 分别表示沿 x 轴和 y 轴平移的距离。
平移矩阵的作用是将点沿 x 和 y 方向移动一定的距离,可以通过改变 tx 和 ty 的值来实现不同的平移效果。
2. 旋转矩阵:在二维坐标系中,绕原点逆时针旋转θ 角度的旋转矩阵的形式如下:R = [cos(θ) -sin(θ)][sin(θ) cos(θ)]旋转矩阵的作用是将点绕原点进行旋转,可以通过改变θ 的值控制旋转的角度。
3. 缩放矩阵:在二维坐标系中,缩放矩阵的形式如下:S = [sx 0][ 0 sy]其中,sx 和 sy 分别表示沿 x 轴和 y 轴缩放的比例。
缩放矩阵的作用是将点的坐标按比例缩放,可以通过改变 sx和 sy 的值来实现不同的缩放比例。
线性代数第二章矩阵及其运算2-3
二、逆矩阵的概念
定义 7 设 A是 n 阶方阵,若存在 n 阶方
阵B,使得 AB=BA=E (3) 则称矩阵 A 可逆,且称 B 是 A 的逆矩阵,记作 B=A-1.
如果不存在满足(3)的矩阵 B,则称矩阵
A 是不可逆的.
现在的问题是,矩阵 A 满足什么条件时可逆? 可逆方阵的逆阵是否唯一,如何求逆阵?可逆 矩阵有什么性质?这是本节要讨论的问题.
A A 2E O,
2
4 移项 得 A 1 1 分解因式 得
2 1 2
3 2 A 2E, A AB A 2 B, 求 B. 0 , AB A 2 B, 求 B. 3
A( 得 解 已知方程变形A E) 2E,
例 3 设 n 阶矩阵 A, B, A + B 均可逆, 证明
练习: 设n阶方阵A满足A2+2A-4E=0,则必有( A) A=E C) A-E可逆 B)A=-3E D) A+3E不可逆 )
解答:因为A与E是可交换的,依题意可得: A2+2A-4E=0 A2+2A-3E=E (A-E)(A+3E)=E, 根据逆矩阵的定义,(A-E)与(A+3E)互逆。故选C
伴随矩阵法.
练习: A,B均为n(n≥3)阶方阵,且AB=0,则A与B( A) 均为零矩阵 C) 至少有一个奇异阵 B) 至少有一个零矩阵 D) 均为奇异阵 )
解答:可以等式两边同取行列式 AB=0 |AB|=0 |A||B|=0,故选C
练习: A,B,C为同阶方阵,A可逆,则下列命题正确的是( A) 若AB=0,则B=0 C) 若AB=CB,则A=C 解答:可以等式两边同乘A-1 AB=0 A-1AB = A-10 EB=0,故选A B)若BA=BC,则A=C D) 若BC=0,则B=0或C=0 )
矩阵与变换小结
第一课 二阶矩阵与平面向量【考点扫描】1. 了解矩阵的相关知识在数学中,把形如,,⎥⎦⎤⎢⎣⎡31⎥⎦⎤⎢⎣⎡−4 2332m ⎥⎦⎤⎢⎣⎡85659080这样的矩形数字(或字母)阵列称做矩阵,一般地,我们用大写黑体拉丁字母A,B,…或者(a ij )来表示矩阵,其中i,j 分别表示元素所在的行和列。
同一横排中按原来次序排列的一行数(或字母)叫做矩阵的行,同一竖排中按原来次序排列的一列数(或字母)叫做矩阵的列,组成矩阵的每一个数(或字母)称为矩阵和元素,所有元素都为0的矩阵称为零矩阵.平面上向量),(y x =α的坐标和平面上的点P (x,y )都可以看做是行矩阵,也可以看做是列矩阵.因此我们又称为行向量,称[y x ]]⎥⎦⎤⎢⎣⎡y x [y x⎥⎦⎤⎢⎣⎡y x 为列向量,在本书中,我们把平面向量(x,y )的坐标写成⎥⎦⎤⎢⎣⎡y x 的形式.当两个矩阵A、B,只有当它们的行数与列数分别相等,并且对应位置的元素也分别相等时,才有A=B.2. 掌握二阶矩阵与平面列向量在乘法规则行矩阵[与列矩阵的乘法规则:=[]]1211a a ⎥⎦⎤⎢⎣⎡2111b b []1211a a ⎥⎦⎤⎢⎣⎡2111b b 21121111b a b a ×+×二阶矩阵与列向量的乘法规则:=⎥⎦⎤⎢⎣⎡22211211a a a a ⎥⎦⎤⎢⎣⎡00y x ⎥⎦⎤⎢⎣⎡22211211a a a a ⎥⎦⎤⎢⎣⎡00y x ⎥⎦⎤⎢⎣⎡×+××+×022021012011y a x a y a x a 一般地两个矩阵只有当前一个列数与后一个矩阵的行数相等时才能进行乘法运算 3. 理解二阶矩阵与平面列向量乘法的几何意义一个列向量左乘一个2×2矩阵M 后得到一个新的列向量,如果列向量表示一个点P (x,y ),那么列向量左乘矩阵M 后的列向量就对应平面上的一个新的点.⎥⎦⎤⎢⎣⎡y x ⎥⎦⎤⎢⎣⎡y x ⎥⎦⎤⎢⎣⎡y x 对于平面上的任意一个点(向量)(x,y ),若按照对应法则T ,总能对应惟一的一个点(向量),则称T 为一个变换,简记为:T :),(y x ′′),(),(y x y x ′′→或T :⎥⎦⎤⎢⎣⎡y x →⎥⎦⎤⎢⎣⎡′′y x一般地,对于平面向量变换T ,如果变换规则为T :⎥⎦⎤⎢⎣⎡y x →⎥⎦⎤⎢⎣⎡′′y x =⎥⎦⎤⎢⎣⎡++dy cx by ax ,那么根据二阶矩阵与平面列向量在乘法规则可以改写为T :⎥⎦⎤⎢⎣⎡y x →⎥⎦⎤⎢⎣⎡′′y x =⎥⎦⎤⎢⎣⎡d c b a ⎥⎦⎤⎢⎣⎡y x 的矩阵形式,反之亦然(a 、b 、c 、d ∈R)由矩阵M确定的变换,通常记为T M ,根据变换的定义,它是平面内点集到自身的一个映射,平面内的一个图形它在T M ,的作用下得到一个新的图形. 【基础训练】 1、 写出方程组变量x,y 的系数矩阵.⎩⎨⎧−=+=−2312my x y x 2、已知,,若A=B ,求a ,b ,c ,d.⎥⎦⎤⎢⎣⎡+=c b da A 23⎥⎦⎤⎢⎣⎡++=d a c b B 2453、某公司负责从两个矿区向三个城市送煤:从甲矿区向城市A 、B 、C 送煤的量分别是100万吨、140万吨、160万吨;从乙矿区向城市A 、B 、C 送煤的量分别是300万吨、260万吨、540万吨;把上述结果分别用2×3矩阵和3×2矩阵表示. 4、分别计算下列乘法运算的结果 (1)(2)(3)⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡423221⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡421001⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡420110(4)⎥⎦⎤⎢⎣⎡1100⎥⎦⎤⎢⎣⎡425、求点A (3,6)在矩阵⎥⎥⎦⎤⎢⎢⎣⎡−21011对应的变换作用下得到的点. 6、已知变换⎥⎦⎤⎢⎣⎡y x →⎥⎦⎤⎢⎣⎡′′y x =⎥⎦⎤⎢⎣⎡−1321⎥⎦⎤⎢⎣⎡y x ,试将它写成坐标变换的形式. 【解题指导】 例1、计算:(1) (2)⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡121011⎥⎦⎤⎢⎣⎡−⎥⎦⎤⎢⎣⎡120110 解:(1)原式= (2)原式=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡×+××+×1311201121⎥⎦⎤⎢⎣⎡−=⎥⎦⎤⎢⎣⎡−×+×−×+×21)1(021)1(120点评:掌握二阶矩阵与平面列向量在乘法规则是解题的关键例2、已知平面上一个正方形ABCD (顺时针)的四个顶点用矩阵表示为⎥⎦⎤⎢⎣⎡d c b a 4000,求a ,b ,c ,d 的值及正方形ABCD 的面积.解:正方形ABCD 的四个顶点的坐标依次为A (0,0)、B (a,c )、C(0,4)、D(b,d),从而可求得a=-2,b=2,c=d=2,|AB|=22,正方形ABCD 的面积为8.点评: 根据顶点矩阵写出正方形的顶点的坐标,再利用正方形中的边长相等,对角线相等互相垂直平分等有关数量关系求出a,b,c,d 的值和正方形的面积. 例3、已知200,0202x y xA B y x y +⎡⎤⎡==⎢⎥⎢−−−⎣⎦⎣⎤⎥⎦,若A=B ,求x ,y.解:由矩阵相等的定义得:,2x y x =+且y 2x y 2−=−−解之得:x=y=-1点评:两个矩阵相等的充要条件是它们的行数与列数分别相等,并且对应位置的元素也分别相等.例4、已知变换,试将它写成矩阵的乘法形式. ⎥⎦⎤⎢⎣⎡−+=⎥⎦⎤⎢⎣⎡′′→⎥⎦⎤⎢⎣⎡y x y x y x y x 252解:根据二阶矩阵与平面列向量在乘法规则得⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡−=⎥⎦⎤⎢⎣⎡′′→⎥⎦⎤⎢⎣⎡y x y x y x 2152点评:一般地,对于平面向量变换T ,如果变换规则为T :⎥⎦⎤⎢⎣⎡y x →⎥⎦⎤⎢⎣⎡′′y x =⎥⎦⎤⎢⎣⎡++dy cx by ax ,那么根据二阶矩阵与平面列向量在乘法规则可以改写为T :⎥⎦⎤⎢⎣⎡y x →⎥⎦⎤⎢⎣⎡′′y x =⎥⎦⎤⎢⎣⎡d c b a⎥⎦⎤⎢⎣⎡y x 的矩阵形式. 例5、已知矩阵,[])(x f A =[]x x B −=1,⎥⎦⎤⎢⎣⎡=a 2x C ,若A=BC ,求函数在[1,2] 上的最小值. )x (f 解: ∵BC=[]x 1x −⎥⎦⎤⎢⎣⎡a 2x =[])x 1(a 2x 2−+, 又∵ A=BC [)(x f A =]2222)(22)(a a a x a ax x x f −+−=+−=,∵x ∈[1,2]当x ≥2时,函数在[1,2]上的最小值为)x (f a 24)2(f −=. 当1≤x <2时,函数在[1,2]上的最小值为. )x (f 2a a 2)a (f −=当x <1时,函数在[1,2]上的最小值为)x (f 1)1(f =∴⎪⎩⎪⎨⎧<<≤−≥−=)1( 1)21( 2)2( 24)(2x x a a x a x f 点评:(1)本题运用了行矩阵与列矩阵的乘法规则及两个矩阵相等的充要条件;(2)求含参数的二次函数在闭区间上的最值问题,通常需要分类讨论. 【本课小结】1. 基础知识:掌握矩阵的相关知识与二阶矩阵与平面列向量乘法的几何意义2. 基本技能:正确地进行二阶矩阵与平面列向量的乘法运算3. 基本思想:灵活运用等价转化、分类讨论、函数与方程的思想解决矩阵问题 【能力测试】 1、“两个矩阵的行数和列数相等”是“两个矩阵相等”的( )A 、充分不必要条件B 、必要不充分条件是C 、充要条件D 、既不充分又不必要条件 2、用矩阵与向量的乘法的形式表示方程组其中正确的是( )⎩⎨⎧−=−=+1y 2x 2y 3x 2A 、 B 、⎥⎦⎤⎢⎣⎡−=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡−122132y x ⎥⎦⎤⎢⎣⎡−=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡−122312y xC 、D 、⎥⎦⎤⎢⎣⎡−=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡−122132y x ⎥⎦⎤⎢⎣⎡−=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡−121223y x3、计算:=__________ ⎥⎦⎤⎢⎣⎡−⎥⎦⎤⎢⎣⎡3211104、点A (1,2)在矩阵对应的变换作用下得到的点的坐标是___________⎥⎦⎤⎢⎣⎡−10225、已知是一个正三角形的三个顶点坐标所组成的矩阵,求a ,b. ⎥⎦⎤⎢⎣⎡b a 20006、已知,⎥⎦⎤⎢⎣⎡−−+−=1sin cos sin cos 1ββααA ⎥⎦⎤⎢⎣⎡−−=1221B 若A=B ,求α,β. 7、设矩阵A 为二阶矩阵,且规定其元素,0a a ji ij =+i=1,2,j=1,2,且2a a 2112=−,试求A. 8、若点A )22,22(在矩阵对应的变换作用下得到的点为(1,0),求α. ⎥⎦⎤⎢⎣⎡−ααααcos sin sin cos 9、若点A 在矩阵对应的变换作用下下得到的点为(2,4),求点A 的坐标.1222−⎡⎢−⎣⎦⎤⎥⎥x x x B sin 2cos sin 10、已知△ABO 的顶点坐标分别是A (4,2),B (2,4),O (0,0),计算在变换T M =之下三个顶点ABO 的对应点的坐标.1111⎡⎤⎢−⎣⎦11、已知矩阵,[])(x f A =[]−=⎥⎦⎤⎢,⎣⎡=x x C sin cos ,若A=BC ,求函数在)x (f ]3,0[π上的最小值.第二课 几种常见的平面变换【考点扫描】1.理解可以用矩阵来表示平面中常见的几何变换,掌握恒等、伸压、反射、旋转、投影、切变变换的矩阵表示及其几何意义(1)一般地,对于平面向量变换T ,如果变换规则为T :⎥⎦⎤⎢⎣⎡y x →⎥⎦⎤⎢⎣⎡′′y x =⎥⎦⎤⎢⎣⎡++dy cx by ax ,那么根据二阶矩阵与平面列向量在乘法规则可以改写为T :⎥⎦⎤⎢⎣⎡y x →⎥⎦⎤⎢⎣⎡′′y x =⎥⎦⎤⎢⎣⎡d cb a⎥⎦⎤⎢⎣⎡y x 的矩阵形式,反之亦然(a 、b 、c 、d ∈R)由矩阵M确定的变换,通常记为T M ,根据变换的定义,它是平面内点集到自身的一个映射,平面内的一个图形它在T M ,的作用下得到一个新的图形.在本节中研究的变换包括恒等变换、伸压变换、反射变换、旋转变换、投影变换、切变变换等六个变换.(2)由矩阵M=确定的变换T ⎥⎦⎤⎢⎣⎡1001M 称为恒等变换,这时称矩阵M 为恒等变换矩阵或单位矩阵,二阶单位矩阵一般记为E.平面是任何一点(向量)或图形,在恒等变换之下都把自己变为自己.(3)由矩阵M=或M=⎥⎦⎤⎢⎣⎡100k ⎥⎦⎤⎢⎣⎡k 001)0k (>确定的变换T M 称为(垂直)伸压变换,这时称矩阵M=或M=伸压变换矩阵.⎥⎦⎤⎢⎣⎡100k ⎥⎦⎤⎢⎣⎡k 001当M=时确定的变换将平面图形作沿x 轴方向伸长或压缩,当⎥⎦⎤⎢⎣⎡100k 1k >时伸长,当时压缩.变换T 1k 0<<M 确定的变换不是简单地把平面上的点(向量) 沿x 轴方向“向下压”或“向外伸”,它是x 轴方向伸长或压缩,以为例,对于x 轴上方的点向下压缩,对于x 轴下方的点向上压缩,对于x 轴上的点变换前后原地不动.1k 0<<当M=时确定的变换将平面图形作沿y 轴方向伸长或压缩,当⎥⎦⎤⎢⎣⎡k 0011k >时伸长,当时压缩.1k 0<<在伸压变换之下,直线仍然变为直线,线段仍然变为线段.恒等变换是伸压变换的特例,伸压变换多与三角函数图象的变换联系起来研究.(4)将一个平面图形变为关于定直线或定点对称的平面图形的变换矩阵称为反射变换矩阵,对应的变换称为反射变换,关于定直线或定点对称的反射又分别称为轴反射和中心反射,定直线称为反射轴,定点称为反射点.反射变换是轴对称变换、中心对称变换的总称.在中学里常研究的反射变换有:由矩阵M 1=确定的变换是关于x 轴的轴反射变换,由矩阵M ⎥⎦⎤⎢⎣⎡−10012=⎥⎦⎤⎢⎣⎡−1001确定的变换是关于y轴的轴反射变换,由矩阵M 3=确定的变换是关于原点的中心反射变换.由矩阵M ⎥⎦⎤⎢⎣⎡−−10014=确定的变换是关于直线y=x 的轴反射变换.⎥⎦⎤⎢⎣⎡0110学习反射变换要与函数图象的变换、解几中二次曲线变换的知识联系起来考虑.其实质是变换对纵横坐标产生的影响.(5)将一个平面图形绕一个定点旋转角α得到另一个平面图形的变换称为旋转变换,其中的角α叫做旋转角,定点称为旋转中心.当旋转中心为原点且逆时针旋转角α时旋转变换的变换矩阵为.旋转变换只会改变几何图形的位置,不会改变几何图形的形状和大小,旋转中心在旋转过程中保持不变,图形的旋转由旋转中心和旋转角所确定.绕定点旋转的变换相当于关于定点作中心反射变换.⎥⎦⎤⎢⎣⎡−ααααcos sin sin cos o 180(6)将一个平面图投影到某条直线(或某个点)的变换称为投影变换,变换对应的矩阵称为投影变换矩阵,本节中主要研究的是由矩阵M 1=⎥⎦⎤⎢⎣⎡0001,M 2=⎥⎦⎤⎢⎣⎡0101 ,M 3=⎥⎦⎤⎢⎣⎡1000确定的投影变换.需要注意的是投影变换是映射,但不是一一映射.(7)由矩阵M=或确定的变换称为切变变换,对应的矩阵称为切变变换矩阵.以为例,矩阵把平面上的点沿x 轴方向平移|ky|个单位,当ky >0时沿x 轴正方向移动,当ky <0时沿x 轴负方向移动,当ky =0时原地不动,⎥⎦⎤⎢⎣⎡101k ⎥⎦⎤⎢⎣⎡101k ⎥⎦⎤⎢⎣⎡101k ⎥⎦⎤⎢⎣⎡101k )y ,x (切变变换有如下性质:(1)x 轴上的点是不动点;(2)保持图形面积大小不变,点间的距离和夹角大小可以改变且点的运动是沿坐标轴方向进行的.切变变换的实质是横(纵坐标)成比例地运动.2.理解二阶矩阵对应的几何变换是线性变换,了解单位矩阵一般地,二阶非零矩阵对应变换把直线变为直线,把直线变为直线的变换叫做线性变换,本节中所研究的6种变换均为线性变换,在研究平面上多边形或直线在矩阵的变换作用后的图形时,只需考察顶点(或端点)的变化结果即可.3.了解恒等、伸压、反射、旋转、投影、切变变换这六个变换之间的关系如恒等变换可以看做伸压、旋转、切变变换的特殊情形;关于坐标原点的中心反射变换可以看做是绕原点作了)Z k ()1k 2(∈π+角度的旋转变换,它还可以看做是先作关于x 轴的反射再作关于y 轴的反射的复合; 绕原点作了β+α角度的旋转变换可以看做是先绕原点作了α角度的旋转变换再绕原点作了β角度的旋转变换等等. 【基础训练】1、已知四边形ABCD 的顶点分别为A (-1,0),B (1,0),C (1,1),D (-1,1),四边形ABCD 在矩阵变换作用下变成正方形,则=( ).⎥⎦⎤⎢⎣⎡100a a A、21 B、2 C、3 D、312、已知矩阵M 1=,M ⎥⎦⎤⎢⎣⎡10012=,M ⎥⎦⎤⎢⎣⎡−10013=⎥⎦⎤⎢⎣⎡0101,则由M 1,M 2,M 3确定的变换分别是( ) A 、恒等变换、反射变换、投影变换 B 、恒等变换、投影变换、反射变换C 、投影变换、反射变换、恒等变换D 、反射变换、恒等变换、投影变换3、直线x+y=5在矩阵 对应的变换作用下得到的图形是( ) ⎥⎦⎤⎢⎣⎡1100A 、直线x+y=5 B 、直线y=5 C 、直线x=5 D 、点(0,54、将向量⎥⎦⎤⎢⎣⎡=12绕原点按逆时针方向旋转4π得到向量b r ,则向量b r 的坐标为=______________.5、图中正方形ABCD 在由矩阵所确定变换的作用后的图形的 面积为_____________.⎥⎦⎤⎢⎣⎡10116、若直线y=4x-4在矩阵M 对应的伸压变换下变成另一条直线y=x-1,则 M=__________.【解题指导】⎥⎥例1、求圆C :在矩阵对应的伸压变换下的曲线方程,并判断曲线的类型. 224x y +=2001A ⎡⎤=⎢⎣⎦解:设P(x,y)是圆C :上的任一点, 224x y +=P 1)y ,x (′′是P(x,y) 在矩阵对应的伸压变换下的曲线上的对应点 , 2001A ⎡⎤=⎢⎣⎦则 即 ,所以⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡′′y x y x y x 21002⎩⎨⎧=′=′y y x x 2⎪⎩⎪⎨⎧′=′=y y x x 2 代入得 224x y +=22''44x y +=方程221164x y +=表示的曲线为椭圆点评:通过变换矩阵建立所求曲线上的点的坐标之间的关系是解决这类问题的关键. 例2、若曲线y=x 2(x ≥0)在矩阵M 对应的反射变换作用下得到的曲线为y=x 2(x ≤0),求矩阵M.解:由两曲线之间的关系知:矩阵M 对应的反射变换是以y 轴为轴的反射变换,所以M =⎥⎦⎤⎢⎣⎡−1001 点评:这类问题在求解时应先确定两曲线之间的反射变换是中心对称反射变换还是是轴对称变换.如果是轴对称变换再进一步确定对称轴,进而写出变换矩阵.例3、若△ABC 在矩阵M 对应的旋转变换作用下得到△A ′B ′C ′,其中A (0,0),B (1,3),C (0,2),A ′(0,0), C ′(-3,1),试求矩阵M 并求B ′的坐标.解、由题意旋转中心为原点,设逆时旋转角为α)20(πα≤≤,则旋转变换矩阵为M= ⎥⎦⎤⎢⎣⎡−ααααcos sin sin cos ∴=⎥⎦⎤⎢⎣⎡−ααααcos sin sin cos ⎥⎦⎤⎢⎣⎡20⎥⎦⎤⎢⎣⎡−13 ∴⎩⎨⎧=−=−1cos 23sin 2αα∴ 故而3πα= ∴M=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡−21232321设B ′(x,y ),则=⎥⎦⎤⎢⎣⎡y x ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡−21232321⎦⎤⎢⎣⎡31=⎥⎦⎤⎢⎣⎡−31 ∴)3,1(B −′点评:逆时针旋转角为α时的旋转矩阵为⎥⎦⎤⎢⎣⎡−ααααcos sin sin cos ,若顺时针旋转角为α时,则将上述矩阵中的α换为-α即可.例4、已知在矩阵M 的作用下点A (1,2)变成了点A ′(11,5),点B (3,-1)变成了点B ′(5,1),点C (x ,0)变成了点C ′(y ,2),求(1)矩阵M ;求(2)x 、y 值. 解: (1)设矩阵M=,⎥⎦⎤⎢⎣⎡d c b a ∴⎥⎦⎤⎢⎣⎡d c b a ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡51121,⎥⎦⎤⎢⎣⎡d c b a ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡−1513 ∴⎪⎪⎩⎪⎪⎨⎧=−=−=+=+135352112d c b a d c b a ,解之得,⎪⎪⎩⎪⎪⎨⎧====2143d c b a ∴M=⎥⎦⎤⎢⎣⎡2143(2)由 得 ⎥⎦⎤⎢⎣⎡2143⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡20y x ⎩⎨⎧==23x y x ∴⎩⎨⎧==62y x 点评:求变换矩阵通常用待定系数法.例5、给定二阶矩阵M ,对任意向量 ,证明:αβu r u r和()M M M αβαβ+=+u r u r u r u r证明:设,a b M c d ⎡⎤=⎢⎥⎣⎦11x y α⎡⎤=⎢⎥⎣⎦ur ,22x y β⎡⎤=⎢⎥⎣⎦u r 121212121212()(()()())x x a x x b y y a b M y y c x x d y y c d αβ++++⎡⎤⎡⎤⎡⎤+==⎢⎥⎢⎥⎢⎥++++⎣⎦⎣⎦⎣⎦u r u r121121211222x x ax by ax by a b a b M M y y cx dy cx dy c d c d αβ++⎡⎤⎡⎤⎡⎤⎡⎡⎤⎡⎤+=+=+⎤⎢⎥⎢⎥⎢⎥⎢⎢⎥⎢⎥++⎣⎦⎣⎦⎥⎣⎦⎣⎦⎣⎦⎣u r u r⎦))⎤⎥⎦1212121212121212()(()(ax ax by by a x x b y y cx cx dy dy c x x d y y ++++++⎡⎤⎡==⎢⎥⎢++++++⎣⎦⎣得证点评:更一般地,可以证明:βλαλβλαλM M M 2121)(+=+,其中21,λλ为任意实数。
三维坐标矩阵运算法则

三维坐标矩阵运算法则一、引言三维坐标矩阵是在三维空间中描述点、向量和变换的重要工具。
在计算机图形学、机器人学、物理学等领域都有广泛的应用。
本文将介绍三维坐标矩阵的基本概念和运算法则。
二、三维坐标矩阵的表示方式三维坐标矩阵可以用一个3行1列的矩阵表示,也可以用一个1行3列的矩阵表示。
例如,点P(x,y,z)可以表示为矩阵[P] = [x, y, z],其中[x, y, z]是一个1行3列的矩阵。
三、点的坐标变换在三维空间中,点的坐标变换可以通过矩阵乘法来实现。
假设有一个点P(x,y,z),经过一个变换矩阵T后得到点P'(x',y',z'),则有以下关系:[P'] = [T] * [P]其中,[P]是原始点的矩阵表示,[P']是变换后点的矩阵表示,[T]是变换矩阵。
四、向量的坐标变换向量的坐标变换与点的坐标变换类似,也可以通过矩阵乘法来实现。
假设有一个向量V(x,y,z),经过一个变换矩阵T后得到向量V'(x',y',z'),则有以下关系:[V'] = [T] * [V]其中,[V]是原始向量的矩阵表示,[V']是变换后向量的矩阵表示,[T]是变换矩阵。
五、矩阵的乘法矩阵的乘法是三维坐标矩阵运算中的基本运算。
两个矩阵相乘的结果是一个新的矩阵,新矩阵的行数等于第一个矩阵的行数,列数等于第二个矩阵的列数。
具体计算方法如下:设有两个矩阵[A]和[B],它们分别是m行n列和n行p列的矩阵,它们的乘积矩阵[C]是m行p列的矩阵。
矩阵C的元素c(i,j)的计算方法为:c(i,j) = a(i,1)*b(1,j) + a(i,2)*b(2,j) + ... + a(i,n)*b(n,j)其中,a(i,k)表示矩阵A的第i行第k列的元素,b(k,j)表示矩阵B的第k行第j列的元素。
六、矩阵的加法和减法矩阵的加法和减法也是三维坐标矩阵运算中的基本运算。
c++坐标系之间的变换

c++坐标系之间的变换坐标系是计算机图形学和几何处理中常用的概念,它用于描述和表示空间中的点位置。
在坐标系之间进行变换是计算机图形学和几何处理中的一项重要任务。
本篇文章将介绍C语言中实现坐标系之间变换的方法和技巧。
一、坐标系的基本概念1. 坐标系表示坐标系通常用坐标轴、原点和单位长度来表示。
在平面直角坐标系中,x轴和y轴将平面分成四个象限,原点表示坐标系的原点,单位长度通常表示为1个单位长度。
在三维空间直角坐标系中,x轴、y轴和z轴将空间分成八个部分,原点表示坐标系的原点,单位长度通常表示为1个单位长度。
2. 坐标系变换坐标系变换包括平移、旋转、缩放、反射等操作。
这些操作可以通过矩阵变换或四元数等方法来实现。
矩阵变换是将一个坐标系转换到另一个坐标系的过程,通常使用齐次坐标表示。
四元数是一种表示三维空间中点的方法,它包含了点的位置、速度和方向的信息。
二、C语言实现坐标系变换的方法1. 矩阵变换矩阵变换是实现坐标系变换的一种常用方法。
在C语言中,可以使用矩阵来表示变换矩阵,通过矩阵运算来实现坐标系的变换。
具体实现过程如下:(1)定义一个4x4的矩阵,用于表示变换矩阵;(2)根据需要,设置矩阵中的元素值;(3)使用矩阵乘法,将原点和目标点进行变换。
下面是一个简单的示例代码,实现了平移变换:```c#include <stdio.h>#define SCALE 1.0 // 缩放因子void translate(double matrix[4][4], double tx, double ty) {matrix[0][0] = SCALE; matrix[0][1] = 0.0; matrix[0][2] = 0.0; matrix[0][3] = tx;matrix[1][0] = 0.0; matrix[1][1] = SCALE; matrix[1][2] = 0.0; matrix[1][3] = ty;matrix[2][0] = 0.0; matrix[2][1] = 0.0; matrix[2][2]= 1.0; matrix[2][3] = 0.0;}int main() {double origin[3]; // 原点坐标double target[3]; // 目标点坐标double matrix[4][4]; // 变换矩阵origin[0] = 0.0; origin[1] = 0.0; origin[2] = 0.0; // 原点坐标设置target[0] = 5.0; target[1] = 5.0; target[2] = 5.0; // 目标点坐标设置translate(matrix, 2.0, 3.0); // 平移距离为2个单位长度,方向为x轴向右和y轴向上// 将原点和目标点进行变换,并输出结果printf("Origin: (%f, %f, %f)\n", origin[0], origin[1], origin[2]);printf("Target: (%f, %f, %f)\n", target[0], target[1], target[2]);return 0;}```该示例代码中,定义了一个4x4的矩阵`matrix`,用于表示平移变换矩阵。
线性变换的矩阵表示与坐标变换
线性变换的矩阵表示与坐标变换线性变换是线性代数中非常重要的概念之一。
它是指将一个向量空间中的向量按照一定的规则进行变换的操作。
线性变换可以通过矩阵进行表示,并且与坐标变换之间存在着紧密的联系。
一、线性变换的定义与性质线性变换是指满足以下两个性质的向量空间之间的映射:1. 对于任意的两个向量u和v,线性变换T(u+v) = T(u) + T(v);2. 对于任意的标量k和向量u,线性变换T(ku) = kT(u)。
线性变换具有一些重要的性质:1. 零向量的线性变换结果仍为零向量:T(0) = 0;2. 线性变换保持向量空间中向量间的线性组合关系;3. 线性变换将向量空间中所有向量的零向量映射到目标向量空间的零向量。
二、矩阵表示线性变换线性变换可以通过矩阵来表示。
假设V和W是两个向量空间,维数分别为n和m,线性变换T: V→W可以表示为一个m×n的矩阵A。
对于向量v∈V,其在基底B={b1,b2,...,bn}下的坐标表示为[v]B =[x1,x2,...,xn]^T,T(v)在基底B'={b1',b2',...,bm'}下的坐标表示为[T(v)]B'= [y1,y2,...,ym]^T,则矩阵A表示了从基底B到基底B'的坐标变换关系。
具体而言,矩阵A的第j列为T(bj)在基底B'下的坐标表示的列向量。
通过矩阵向量乘法,可以得到变换后向量的坐标表示。
即:[T(v)]B' = A[v]B三、从坐标变换到线性变换以上我们讨论了线性变换如何通过矩阵表示,现在我们来看看如何从给定的坐标变换得到对应的线性变换矩阵。
考虑二维向量空间的坐标变换示例。
假设向量空间V的基底为B={e1,e2},向量空间W的基底为B'={e1',e2'}。
将V中的向量v表示为[v]B = [x1,x2]^T,W中的向量T(v)表示为[T(v)]B' = [y1,y2]^T。
3x3 矩阵的对角化 坐标变换

3x3矩阵的对角化坐标变换矩阵在数学和物理领域中具有广泛的应用。
对角化是矩阵理论中的重要概念之一。
在本文中,我们将探讨如何对一个3x3矩阵进行对角化坐标变换。
首先,我们需要明确什么是对角化。
对角化是指将一个矩阵通过相似变换转化为对角矩阵的过程。
对角矩阵是一种特殊的矩阵,它的非主对角线上的元素都为零。
对角化的一个重要应用是简化矩阵的计算,并且能够提供矩阵的特征值和特征向量。
对于一个给定的3x3矩阵A,我们希望找到一个可逆矩阵P,使得P的逆矩阵P^-1与矩阵A相乘后得到一个对角矩阵D,即P^-1*A* P=D。
那么,我们的目标就是求解矩阵P和对角矩阵D。
为了实现矩阵的对角化,我们需要按照以下步骤进行操作:步骤一:求解矩阵的特征值首先,我们需要计算矩阵A的特征值。
特征值是指矩阵A与其特征向量的线性关系,即A*x=λ*x,其中λ为特征值,x为特征向量。
通过求解矩阵A的特征方程det(A-λI)=0,我们可以得到矩阵A的特征值。
步骤二:求解特征向量一旦我们获得了矩阵A的特征值,接下来我们需要求解对应的特征向量。
特征向量与特征值配对,用于构成矩阵A的对角化矩阵。
通过求解方程组(A-λI)x=0,我们可以获得对应于特征值的特征向量。
步骤三:构建可逆矩阵P和对角矩阵D在获得矩阵A的特征向量后,我们可以将这些特征向量合并构成一个矩阵P,并将矩阵P的逆矩阵记为P^-1。
同时,将矩阵A的特征值按对角线顺序排列构成一个对角矩阵D。
这样,我们就得到了P、P^-1和D。
步骤四:验证对角化结果最后,我们需要验证通过变换得到的矩阵是否满足P^-1*A*P =D。
通过进行矩阵乘法运算,我们可以确认对角化过程的准确性。
综上所述,对一个给定的3x3矩阵进行对角化坐标变换的步骤包括:首先,求解矩阵的特征值;其次,求解特征向量;然后,构建可逆矩阵P和对角矩阵D;最后,验证对角化结果。
通过这些步骤,我们可以实现对一个3x3矩阵的对角化坐标变换,并简化矩阵的计算。
3-2.2齐次变换矩阵及其运算

空间某一点在直角坐标系中的平移,由 A(x, y, z)平移至A′(x′, y′, z′), 即
x ' x x y ' y y z ' z z
x' 1 y ' 0 z ' 0 1 0 0 0 x 1 0 y 0 1 z 0 0 1 x y z 1
0 sin 1 0 0 cos 0 0
0 0 0 1
上海电机学院 机械学院
如图所示单操作手臂,并且手腕 也具有一个旋转自由度。已知手 部的起始位姿矩阵为G1.
若手臂绕Z0轴旋转90°,则手臂 到达G2;若手臂不动,仅手部绕 手腕Z1轴转90°,则手部到达 G3.写出手部坐标系G2、G3表达 式。
a′=Trans(Δx, Δy, Δz)a
平移算子
上海电机学院 机械学院
1 0 T rans (x, y, z ) 0 0
0 1 0 0
0 x 0 y 1 z 0 1
① 算子左乘: 表示点的平移是相对固定坐标系进行的坐标变换。 ② 算子右乘: 表示点的平移是相对动坐标系进行的坐标变换。 ③ 该公式亦适用于坐标系的平移变换、 物体的平移变换, 如机 器人手部的平移变换。
(1)同一点在不同坐标系{B}和{A}中的变换; (2)描述坐标系{B}相对于坐标系{A}的位置和方位; (3)点的运动算子。
A B p A T p B
0 1 A BT 0 0
0 0 1 0
1 1 0 3 0 4 0 1
1 0 T rans (x, y, z ) 0 0
根据变换方程,可以立即求出
B W S G W 1 T B T T TT TT S G
线性代数 矩阵的基本运算
ai1
⋮
am1
a12 ⋮
ai2 ⋮
am2
⋯ ⋯ ⋯
a1n ⋮
ain ⋮
amn
bb1211 ⋮ bn1
⋯ b1j ⋯ b2 j
⋮ ⋯ bnj
⋯ ⋯
b1s b2s ⋮
=
c11 ⋮ ci1
⋯ bns
⋮ cm1
⋯ c1j ⋮
⋯ cij ⋮
⋯ cmj
⋯
c1s ⋮
⋯
cis
⋮
3 2
=
(1
×
3
+
2
×
2
+
3
×
1)
= (10).
1
例 C = − 2
1
4 2 − 22×2 − 3
4 = − 16 − 32 − 62×2 8 16 2 × 2
2
C2
=
2 3
(1
2) =
2 ×1 2×1 3 ×1
2 × 2 2
2×2 3×2
=
2 3
4 4. 6
例设
A
=
例2(向量的线性变换)
y a′ 在同的坐标平中,向量 a 绕时绕绕绕θ .
确定 a′ 和 a 的坐标的的的关平 .
θα a
O
x
a
=
x y
,
a′
=
x′ y′
.
r = x2 + y2 = x′2 + y′2 . x = r cosα , y = r sinα . x′ = r cos(α +θ ) = r cosα cosθ − r sin α sinθ
= x cosθ − y sinθ .
透视转换矩阵与坐标运算

透视转换矩阵与坐标运算透视转换矩阵是一种将二维图像投影到三维视平面的变换矩阵。
通过透视转换,可以将三维空间中的物体或场景映射到二维平面上,同时保留物体的远近和透视效果。
在透视转换中,需要将三维空间中的坐标转换为二维平面上的坐标。
这个过程需要使用透视转换矩阵,该矩阵由一系列参数确定,这些参数包括投影中心点、视平面法向量、透视宽度和高度等。
具体来说,透视转换矩阵可以将三维空间中的点P(x, y, z)映射到二维平面上的点P'(x', y')。
这个映射过程可以通过以下公式实现:x' = (x * near) / (z * far - near)y' = (y * near) / (z * far - near)其中,near和far分别是视平面到投影中心的距离和无穷远处的距离,它们是透视转换矩阵的重要参数。
在进行透视转换时,还需要注意坐标的齐次化处理。
齐次化处理是一种将坐标从笛卡尔坐标系转换为齐次坐标系的方法,其中每个坐标都增加了一个额外的维度w。
通过将坐标转换为齐次坐标,可以方便地进行透视转换和插值操作。
在齐次坐标系中,任意一个点P的坐标可以表示为P(x, y, z, w),其中(x, y, z)是点P 在三维空间中的位置坐标,w是一个标量值。
在进行透视转换时,需要将齐次坐标中的w值除以z值,以获得正确的二维平面上的坐标。
总之,透视转换矩阵和坐标运算是实现三维图形渲染和变换的关键技术。
通过透视转换矩阵,可以将三维空间中的物体映射到二维平面上,同时保留物体的远近和透视效果。
在进行透视转换时,需要注意坐标的齐次化处理和插值操作,以确保图形渲染的准确性和流畅性。
测绘技术中的矩阵运算方法解析

测绘技术中的矩阵运算方法解析测绘技术是一门关于地理空间信息的收集、处理和分析的学科。
在测绘技术中,矩阵运算方法是一种重要的数学工具,它在地理坐标转换、形变分析和图像处理等方面有广泛的应用。
本文将对测绘技术中的矩阵运算方法进行解析。
矩阵运算方法是一种基于矩阵理论的数学分析方法。
它的核心思想是将多维数据转化成矩阵形式,并通过矩阵运算来实现对数据的处理和分析。
在测绘技术中,常用的矩阵运算方法包括矩阵加减、矩阵乘法、矩阵转置、矩阵求逆等。
首先,矩阵加减是指将两个矩阵对应位置上的元素进行相加或相减。
在测绘技术中,矩阵加减常用于坐标转换和形变分析。
例如,当进行坐标转换时,可以将待转换坐标和转换参数表示为矩阵形式,然后通过矩阵加减的运算,将待转换坐标转换为目标坐标。
其次,矩阵乘法是指将两个矩阵相乘得到的新矩阵。
在测绘技术中,矩阵乘法常用于坐标变换和图像处理。
例如,在进行坐标变换时,可以将待变换坐标和变换矩阵表示为矩阵形式,然后通过矩阵乘法的运算,将待变换坐标变换为目标坐标。
在图像处理中,矩阵乘法常用于图像变换和平滑处理。
例如,通过矩阵乘法可以实现图像的旋转、缩放和平移等操作,同时还可以实现对图像的平滑处理,提高图像的质量。
此外,矩阵转置是指将矩阵的行和列进行互换。
在测绘技术中,矩阵转置常用于计算坐标变换和形变分析中的参数。
例如,在进行坐标变换时,可以将待变换坐标和变换参数表示为矩阵形式,然后通过矩阵转置的运算,得到变换参数的逆矩阵,从而实现坐标的反变换。
在形变分析中,矩阵转置常用于计算形变参数的伪逆矩阵,从而实现对形变数据的分析和处理。
最后,矩阵求逆是指将一个矩阵转化为其逆矩阵。
在测绘技术中,矩阵求逆常用于坐标变换和形变分析中的参数计算。
例如,在进行坐标变换时,可以通过求解变换矩阵的逆矩阵,从而得到待变换坐标到目标坐标的转换关系。
在形变分析中,矩阵求逆常用于计算形变参数的逆矩阵,从而实现对形变数据的反分析和反处理。
矩阵及矩阵运算坐标变换
A=[0 1 1 0;0 1 -1 0]; Rc=[cos(pi/6) -sin(pi/6); sin(pi/6) cos(pi/6)]; %变换矩阵,逆时针旋转 pi/6
figure(2) plot(A(1,:),A(2,:))
%绘出初始图形
x=A(1,:);
y=A(2,:);
fill(x,y,'b') axis([-1.5 1.5 -1.5 1.5]); %避免坐标轴改变影响图形效果
⎛ a11 a12 " a1n ⎞
A
=
⎜ ⎜ ⎜
a21 "
a22 "
"
a2n
⎟ ⎟
" "⎟
⎜ ⎝ am1
am 2
"
⎟ amn ⎠
173
或简记为 Am×n或(aij )m×n , A 或 A = (aij ) .
aij 是第 i 行第 j 列的元素.称为 A 的 (i, j ) 元.
A 中的元素全为实数的矩阵称为实矩阵, A 中的元素是复数的矩阵称为复矩阵.
0⎤
Sy
⎥ ⎦
,
Sx
,
Sy
分别为
x
轴和
y
轴的缩放比例。若二者不等,则图形形状改
变。现请将前面三角形等比例、不等比例缩放。 MatLab 源程序: % 缩放变换程序
A=[0 1 1 0;0 1 -1 0];
figure(1); plot(A(1,:),A(2,:))
%绘出初始图形
hold on S=[2 0; 0 2]; Anew=S*A;
yxpyxprxyr175??????????ysincossincosr则cossinsincosyxyyxx?可以表示为????????????????yxx是一个snsincossincos设ijaa是一个ms矩阵cijbb其中矩阵那末规定矩阵a与矩阵b的乘积是一个mn矩阵ikkjabijcs11iab221ijjijissjabkcab12
机械臂坐标系矩阵变换
机械臂坐标系矩阵变换机械臂是一种能够模拟人的手臂动作的机械装置,广泛应用于工业生产线和科研实验室中。
机械臂的运动控制是其中关键的一环,而坐标系矩阵变换则是实现机械臂运动控制的基础。
什么是坐标系矩阵变换坐标系矩阵变换是指将一个坐标系的坐标转换到另一个坐标系中的过程。
在机械臂运动控制中,通常会存在多个坐标系,例如关节坐标系、工具坐标系等,它们之间的转换需要通过坐标系矩阵变换来实现。
坐标系矩阵变换涉及到向量和矩阵的运算,其中矩阵的元素描述了不同坐标系之间的关系。
通过矩阵的乘法运算,我们可以将一个坐标系的坐标转换到另一个坐标系中。
机械臂坐标系矩阵变换的应用机械臂的运动控制主要涉及到位置的控制和姿态的控制。
在进行位置控制时,需要通过坐标系矩阵变换将目标位置在关节坐标系下的表示转换到工具坐标系下。
这样,机械臂就可以根据转换后的坐标在工具坐标系中进行运动。
而在进行姿态控制时,需要将目标姿态在工具坐标系下的表示转换到关节坐标系下。
这样,机械臂就可以根据转换后的姿态来调整各个关节的角度,从而实现目标姿态的控制。
在实际应用中,机械臂坐标系矩阵变换还可以用于实现机械臂的运动规划和轨迹插补。
通过对目标位置和姿态进行坐标系变换,可以在不同坐标系下方便地进行运动规划和轨迹插补,从而实现机械臂的精确控制。
机械臂坐标系矩阵变换的原理机械臂坐标系矩阵变换的原理基于欧几里得几何学和齐次坐标的理论基础。
在欧几里得几何学中,我们可以通过向量的加减和标量的乘除来表示坐标的变换。
而齐次坐标则通过引入一个额外的维度来简化坐标系的变换表示。
在机械臂坐标系矩阵变换中,我们通常使用4×4的齐次变换矩阵来表示坐标系之间的变换关系。
这个齐次变换矩阵由旋转矩阵和平移向量组成,其中旋转矩阵描述了坐标系之间的旋转关系,平移向量描述了坐标系之间的平移关系。
通过将目标位置和姿态的坐标转换到不同坐标系下,机械臂可以根据转换后的坐标来进行运动控制。
具体来说,机械臂可以根据转换后的坐标计算出关节的角度,然后通过控制关节的运动来实现机械臂的运动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
北京化工大学 姜冬青
教学目的: 1)通过生动有趣的例子,贯穿本节引入 矩阵、矩阵乘法定义,; 2)通过课程内容的讲解,要求学生能够自己编程实现例子加深 对矩阵及其乘法运算的 理解;
教学重点、难点: 矩阵定义,矩阵乘法。
教学用时: 30 分钟。
使用建议:本例是基本的旋转变换,只要学生学习了 C 语言均可编程实现,算法简单,易于 实现,所有专业均可。该例子还可用作正交矩阵和线性空间中例子。 这里只是矩阵定义和乘法,并非完整教学内容。
0⎤
Sy
⎥ ⎦
,
Sx
,
Sy
分别为
x
轴和
y
轴的缩放比例。若二者不等,则图形形状改
变。现请将前面三角形等比例、不等比例缩放。 MatLab 源程序: % 缩放变换程序
A=[0 1 1 0;0 1 -1 0];
figure(1); plot(A(1,:),A(2,:))
%绘出初始图形
hold on S=[2 0; 0 2]; Anew=S*A;
− +
y sinθ y cosθ
可以表示为
⎡ x'⎤ ⎢⎣ y'⎥⎦
=
⎡cosθ ⎢⎣ sin θ
− sinθ ⎤⎡x⎤ cosθ ⎥⎦⎢⎣ y⎥⎦
( ) ( ) 定义 设 A = aij 是一个 m × s 矩阵,B = bij 是一个 s × n 矩阵,那末规定矩阵 A 与矩
( ) 阵 B 的乘积是一个 m × n 矩阵 C = cij ,其中
A2=Rc*A;
plot(A2(1,:),A2(2,:),'r') legend('原图','旋转后图形')
175
当连续对图形进行旋转变换,就可以得到我们开始看到的动画。
在 MATLAB 中的计算结果及源程序: 下面给出旋转动画程序,旋转 pi/6,旋转 12 次,即旋转 1 周。 % 动画制作程序
0
clf
A=[0 1 1 0;0 1 -1 0]; Rc=[cos(pi/2) -sin(pi/2); sin(pi/2) cos(pi/2)]; %变换矩阵,逆时针旋转 pi/2
figure(2)
hold on plot(A(1,:),A(2,:))
%绘出初始图形
axis([-1.5 1.5 -1.5 1.5]); %避免坐标轴改变影响图形效果
% hold on
pause
A2=Rc*A;
for i=1:12 plot(A2(1,:),A2(2,:))
%绘出旋转图形
x=A2(1,:);
y=A2(2,:);
fill(x,y,'b')
axis([-1.5 1.5 -1.5 1.5A2;
end 练习题:计算机中常用的一种基本几何变换是缩放变换。
%变换矩阵,等比例放大 2 倍 %缩放变换
176
留给学生的思考题:这种旋转变换会改变图形的形状吗? 在第四章讲完正交矩阵后给出解答
177
教学对象:大二,计算机专业、高分子材料专业
引入:
首先演示一下示例,激发学生兴趣,让学生带着问题进入课程中 。 引例
平面上一点在计算机中可以通过它的坐标进行存储,如 p 点坐标(x,y);而平面上的 一个图形可以在计算机上存储为顶点的集合,通过画出顶点,并将顶点用直线进行相连即可
得到图形。若有 n 个顶点 p1, p2 ,..., pn ,则它们对应 n 个坐标,如果将这 n 个坐标写成数表,
y
p'(x', y')
r
r
θD
φD
p(x, y)
x
x = r cosφ x'= r cos(θ + φ)
由图可知
和
,由三角公式可以推出:
y = r sinφ y'= r sin(θ + φ)
r cos(θ + φ) = r(cosθ cosφ − sinθ sinφ) = x cosθ − y sinθ r sin(θ + φ) = r(sinθ cosφ + cosθ sinφ) = x sinθ + y cosθ
s
∑ cij = ai1b1 j + ai2b2 j + " + aisbsj = aikbkj , k =1
(i = 1, 2,"m; j = 1, 2,", n),
记为 C = AB.
注意:左边矩阵的列数等于右边矩阵的行数才能定义乘积。 学生课堂完成:
顶点为(0,0),(1,1),(1,-1)的三角形,逆时针旋转 90 度。 该图形对应的矩阵为:
即
x'= x cosθ − y sinθ y'= x sinθ + y cosθ ,
若将 p 点坐标描述为 (x, y) ,将 p' 坐标描述为 (x', y'),定义旋转变换矩阵为:
174
Rθ
=
⎡cosθ ⎢⎣ sin θ
− sinθ ⎤
cosθ
⎥ ⎦
则,
x'= y'=
x cosθ x sinθ
既有:
x y 1.矩阵的概念
P1
P2
x1
x2
y1
y2
。。。 pn 。。。 xn 。。。 yn
由 m × n 个数 aij (i = 1, 2,", m; j = 1, 2,", n) 排成的 m 行 n 列的数表
a11 a12 " a1n
a21 a22 " a2n
##
#
am1 am2 " amn
称为 m 行 n 列矩阵,简称 m × n 矩阵,记作
A=[0 1 1 0;0 1 -1 0]; Rc=[cos(pi/6) -sin(pi/6); sin(pi/6) cos(pi/6)]; %变换矩阵,逆时针旋转 pi/6
figure(2) plot(A(1,:),A(2,:))
%绘出初始图形
x=A(1,:);
y=A(2,:);
fill(x,y,'b') axis([-1.5 1.5 -1.5 1.5]); %避免坐标轴改变影响图形效果
缩放:指放大或缩小一个对象尺寸。缩放常量 sx 和 s y 恒为正,分别用来描述 x 轴和 y 轴方
向的长度变化。缩放常量大于 1 表示放大图形,小于 1 表示缩小图形。 p' = Ssx ,sy ( p) ,其
中, x'= sx x , y'= sy y ,变换矩阵为
SSx ,Sy
=
⎡ ⎢ ⎣
Sx 0
解决问题:
平面上图形有 n 个顶点 p1, p2 ,..., pn ,则它们对应 n 个坐标,将这 n 个坐标存储在 2×n
矩阵中,顶点的 x 坐标存储在矩阵的第一行,y 坐标存储在第二行。
即:
⎡x1 x2 " xn ⎤
⎢ ⎣
y1
y2
"
y
n
⎥ ⎦
学生课堂练习: 存储一个顶点为(0,0),(1,1),(1,-1)的三角形,给出存储矩阵:
⎛ a11 a12 " a1n ⎞
A
=
⎜ ⎜ ⎜
a21 "
a22 "
"
a2n
⎟ ⎟
" "⎟
⎜ ⎝ am1
am 2
"
⎟ amn ⎠
173
或简记为 Am×n或(aij )m×n , A 或 A = (aij ) .
aij 是第 i 行第 j 列的元素.称为 A 的 (i, j ) 元.
A 中的元素全为实数的矩阵称为实矩阵, A 中的元素是复数的矩阵称为复矩阵.
A
=
⎡0 ⎢⎣0
1 1
1 −1
0⎤ 0⎥⎦
图形封闭,所以终点也是(0,0) 2.矩阵乘法
现在我们已经会将一个平面图形存储在计算机中,下面通过改变顶点的位置,并重新绘 制图形,实现图形变换。如果变换是线性的,则可以通过矩阵乘法实现。
计算机中经常用到的一种基本几何变换为旋转变换: 旋转:对象绕着坐标原点旋转。一般,逆时针为正,顺时针为负。
变换矩阵为:
A
=
⎡0 ⎢⎣0
1 1
1 −1
0⎤ 0⎥⎦
Rθ
=
⎡cos(90) ⎢⎣ sin(90)
− sin(90)⎤
cos(90)
⎥ ⎦
旋转后的图形坐标为:
A'
=
Rθ
A
=
⎡0 ⎢⎣0
−1 1 11
0⎤ 0⎥⎦
在 MATLAB 中的计算结果及源程序:
A2=
0 -1.0000 1.0000
0
0 1.0000 1.0000