盾构施工人工测量与自动测量技术探讨
盾构法施工中的测量技术分析

盾构法施工中的测量技术分析摘要:地铁建设大多采用盾构法进行区间隧道施工,而盾构法对测量精度的要求较高,测量人员需结合现场情况,采用合适的测量方法提高测量精度,从而为盾构法施工提供技术保障。
关键词:城市轨道;地铁建设;盾构法;测量技术;为缓解城市的交通压力,各大城市均在规划修建地铁,而地铁建设大多采用盾构法进行区间隧道施工,同时盾构法施工也越来越多的应用在公路、电力、供排水、通信等施工领域。
而盾构法对测量精度的要求较高,测量人员需结合现场情况,采用合适的测量方法提高测量精度,从而为盾构法施工提供技术保障。
本文主要对盾构施工中的测量有关内容进行全面分析和梳理:一、关于盾构法施工测量的内容在地铁建设开展前,测量人员需构建切实可行的平面及高程控制系统,确保测量成果的及时性和准确性。
在明确测量方法、精度标准之后,测量实际工作大致可分为两部分:第一,地面控制测量工作。
在工程开始之前,业主移交控制点之后,测量人员需要对地面控制点的坐标进行复测,以评估移交控制点坐标的准确性是否满足施工需要。
该测量成果必须经多级测量复核确认,并周期性的开展复测工作。
地面控制测量分为平面控制测量和高程控制测量。
平面控制测量有三角测量法、精密导线法和GPS定位法等测量方法,高程控制测量有常规水准测量法和三角高程测量法。
实际施工测量常采用精密导线法和常规水准测量法复测确定测量控制点。
第二,联系测量工作。
工程开始后,需将地面平面坐标系统和高程系统传递到地下施工区域以便指导地下施工,此项传递数据的工作称为联系测量。
联系测量分为平面定向测量和高程传递测量。
其中高程传递测量有钢尺传递法和测距仪传递法两种测量方法;定向测量有一井定向,二井定向和陀螺仪定向等测量方法。
实际施工中常用钢尺传递法和二井定向传递地面坐标,在较长的隧道施工中,还要增加陀螺仪定向来验证联系测量成果。
(一)常用测量方法的特点1、精密导线法:精密导线测量是指精度达到相邻点位的相对中误差不超过1:120 000的导线测量,一般指国家二等或二等以上的导线测量。
浅谈地铁盾构施工测量控制

浅谈地铁盾构施工测量控制随着城市化进程的不断推进,地铁成为大多数城市公共交通的重要组成部分。
地铁的建设方式有多种,其中盾构施工技术的应用越来越普及。
盾构施工是一种高效、安全、环保的施工方式,在地铁建设中起到了重要作用。
然而,盾构施工的实施也需要进行测量控制,以确保施工的准确性和安全性。
一、盾构施工的基本原理盾构施工是利用盾构机在地下开挖隧道,施工过程中需要控制盾构机的前进方向、水平位置、高度和姿态等参数,以确保施工的准确性和安全性。
一般来说,盾构机的控制是基于激光测距、GPS定位、惯性导航等技术实现的。
其中,激光测距技术被广泛应用于盾构施工中,通过在隧道内设置一定数量的反射板和激光探头,实现对盾构机位置和姿态的准确测量。
盾构施工的测量控制是保证施工准确性和安全性的基础工作。
盾构施工的测量控制主要包括三个方面:前方探测、导向系统和盾构机机身控制。
1. 前方探测前方探测是盾构施工中最为重要的环节之一,通常采用激光测距的方式完成。
前方探测即指对盾构机前方的掘进面进行测量控制,以保证盾构机的前进方向和姿态的准确性。
前方探测系统包括激光探头、反射板以及控制系统。
在施工前需要先在盾构机前方设置一定数量的反射板,然后在探头和参考平面之间发射激光,通过激光探测和反射板的反射,计算出盾构机前方的距离和位置,再通过控制系统控制盾构机的前进方向和姿态,以确保盾构机准确掘进。
2. 导向系统导向系统是盾构施工中另一个重要的环节,通过导向系统,可以保证盾构机沿着设计线路掘进,避免偏离和偏移。
导向系统通常包括传感器、控制系统和电动执行器等组件。
传感器可以实时测量盾构机的位置和姿态信息,并将数据发送到控制系统。
控制系统通过处理传感器数据,控制电动执行器的转动,实现盾构机的精确定位和导向。
3. 盾构机机身控制盾构机机身控制是盾构施工中最基本的一环,确保盾构机的前进和掘进位置的准确定位,同时还可以实现其他功能,如掘进速度控制、盾构机的转向、后备推进等。
浅谈地铁盾构法隧道施工测量技术
浅谈地铁盾构法隧道施工测量技术摘要:本文结合珠江三角洲城际城际快速轨道交通广州至佛山段土建工程盾构法隧道施工测量的实践,介绍地铁盾构法隧道施工中的控制测量、联系测量、ROBOTEC自动测量系统、盾构姿态人工检测、管环片测量等,其中ROBOTEC自动测量系统的应用和维护经验是本文的重点。
关键词:盾构;隧道;测量; ROBOTEC自动测量系统;贯通引言在城市轨道快速发展的今天,特别是在盾构法隧道机内台车狭小的空间里,既要满足施工过程中材料的运输,又要经常性对盾构姿态进行人工测量。
人工测量占用时间和空间,故无法满足快速.准确的施工要求,为解决这一问题我们引用了ROBOTEC自动测量系统,将其架设在台车的左上方对盾构姿态随时进行自动测量,节约了时间,这一方法有效提高施工速度和增加了经济效益1.控制测量1.1 地面平面控制测量针对于平面测量在地铁领域的应用,主要是分为两级布局控制网,即GPS控制网以及精密导线控制网。
据以往隧道施工测量经验和本次隧道贯通误差的规定,根据《工程测量规范》中的有关规定,采用高精度全站仪以测角.测距精密导线网作为隧道地面平面控制测量方法,测量导线按三等导线精度要求进行。
地面控制导线网尽量利用业主提供的控制点,适当加设少量导线点,基本上按照线路走向布设,采用附和导线多测回测量的方式,提高测量精度,增加复核条件,增加各开挖洞口的控制桩个数和观测检查方向,以及将施工测量的精度结果与业主的测量成果进行比较。
1.2 地面高程控制测量地面高程控制网是在城市二等水准点下布设的精密水准网,常规水准测量按城市二等水准精度指标要求,根据业主所给的所有水准基点,布设附和导线,进行高程计算和平差,复核各个水准点的高程。
与平面控制网进行联测,测定各个平面控制点的高程。
隧道进出洞口设置2个以上水准点,按闭合路线测量并进行严密平差。
精密水准点选在离施工场地变形区外稳固的地方,墙上水准点选在永久性建筑物上。
水准点点位应便于寻找.保存和引测。
浅谈地铁盾构施工测量控制

浅谈地铁盾构施工测量控制地铁盾构施工测量控制是地铁建设工程中的重要环节,通过科学的测量控制,可以确保盾构施工的质量和安全。
盾构施工是地铁建设中的关键工程,对盾构施工的测量控制,既要保证施工的精度和质量,又要确保安全生产,因此浅谈地铁盾构施工测量控制是非常必要的。
一、地铁盾构施工的特点地铁盾构施工是一种特殊的土木工程施工方式,其施工特点主要包括以下几个方面:1. 地下施工环境复杂:盾构机在地下开挖,受到地下水、地下岩体等因素的影响,施工环境复杂,要求施工测量控制具有一定的适应性和灵活性。
2. 施工工艺复杂:盾构施工需要经过多道工序,包括土方开挖、支护、管片安装等多个环节,施工测量控制需要覆盖施工全过程,保证各个环节的质量和精度。
3. 安全风险大:盾构施工可能受到地下水涌、地下岩体崩塌等安全风险的影响,测量控制需要及时识别和应对安全风险,确保施工安全。
二、地铁盾构施工测量控制的要点地铁盾构施工测量控制是地铁建设工程中的关键环节,主要包括以下几个要点:1. 测量基准确定:地铁盾构施工需要依托一定的测量基准,确定地下隧道的位置和方向,建立施工坐标系。
测量基准的确定需要考虑地下地质特征、工程控制要求等因素,确保测量基准的准确性和稳定性。
2. 盾构机控制:盾构机在施工过程中需要保持一定的位置和方向,控制盾构机的位置和姿态。
盾构机的位置和姿态控制需要依托测量技术,包括全站仪、导线法等,确保盾构机在施工过程中的精度和稳定性。
3. 施工质量控制:盾构施工过程中需要对土方开挖、管片安装等工序进行测量控制,确保施工质量和精度。
测量控制需要依托现代测量技术,包括全站仪、卫星定位等,对施工过程进行实时监测和控制。
4. 安全监测及应对:地铁盾构施工过程中可能受到地下水涌、地下岩体崩塌等安全风险的影响,需要进行安全监测及应对。
安全监测需要依托现代监测技术,包括地下水位监测、地下岩体位移监测等,确保施工过程中及时识别和应对安全风险。
浅谈地铁盾构隧道施工测量技术

浅谈地铁盾构隧道施工测量技术摘要:近年来,随着我国经济的快速发展以及城镇化进程的加快,城市人口不断增加,城市交通拥堵问题越来越突出,因此发展城市轨道交通、缓解紧张的交通运输压力也日益成为各大城市迫切需要解决的问题。
与其他交通形式相比,地铁以运量大、快速、准时、节能环保及安全舒适等特点受到了各大中型城市的青睐,也逐渐成为城市展示经济实力、城市化建设程度以及高新技术应用的重要标志。
关键词:地铁盾构;隧道施工;测量技术盾构法施工是一种先进的隧道施工技术,与其他施工技术相比较,盾构施工引起的地表沉降较小,对施工现场周围环境的影响小,是目前地铁隧道施工中最安全有效也是应用最广泛的施工方法。
本文结合某市地铁隧道盾构施工测量工作的具体问题和实际做法,总结出了某市地铁盾构施工建设各个阶段测量工作的要点,提出了一种适用于某市地铁盾构施工的的测量流程,以便为某市后续线路的建设提供测量依据,并且也能为其他地区和单位的地铁盾构施工测量管理提供一个有价值的参考。
一、盾构施工测量简介盾构隧道施工测量是指为盾构掘进施工和管片拼装符合设计要求而进行的测量工作。
盾构施工测量工作主要内容包括地面控制测量、联系测量、地下控制测量、和贯通测量等。
二、盾构施工测量1、设计数据的复核工程准备开工时,应进行图纸会审。
图纸会审时,测量人员应根据图纸线路参数对盾构掘进轴线(隧道中线)三维坐标进行计算,计算资料必须做到两人独立计算复核,必要时经过第三者计算复核或用不同的方法进行计算复核,对比检查,自检合格后报监理单位及第三方控制测量单位复核,经多方确认的盾构轴线坐标数据由相关方各执一份,作为以后施工过程轴线偏位检查的重要依据。
2、盾构设计数据的导入验收盾构施工隧道中线坐标进行计算完成之后,土建施工单位要将计算得到的数据导入到盾构机导向系统,这个过程要求业主、土建施工单位、监理单位和第三方控制测量单位共同参与,验收无误后要求各方签字确认,并且拍照留存。
地铁盾构施工人工测量方法探讨
地铁盾构施工人工测量方法探讨摘要:本文结合合肥地铁项目,讲述了地面控制测量、联系测量盾构机人工测量和管片测量关键词:地铁;盾构;人工测量盾构法具有施工速度快、机械化程度高、人员配备少、不影响地面交通等优点,所以在地铁区间施工中得到广泛应用。
盾构施工测量是盾构施工中最重要的环节之一。
现以合肥市地铁一号线9标南宁路站~贵阳路站盾构区间(以下简称南贵区间)介绍盾构施工人工测量方法。
一、控制测量1、地面控制测量地面控制测量分为地面平面控制测量和地面高程控制测量,本工程控制点是合肥轨道公司提供的覆盖线路的整体控制网。
2、联系测量首先测设近井点。
根据地面控制点在贵阳路站区间布设两个近井点,形成闭合导线,导线变数4条。
高程按照二等水准进行加密。
通过近井点用两井定向把控制点加密到贵阳路站底板。
为提高精度,盾构始发点采用强制对中装置(如图1所示)。
高程传递采用吊钢尺的方法。
从始发到接收共做了三次联系测量,三次测量方位角差值不到1″(表1所示)。
3、洞内导线测量本工程隧道长度582米,则隧道导线加密采用支导线往返测的方法进行。
二、盾构机始发前测量1、在盾构机始发前利用联系测量控制点,满足盾构机组装、反力架、轨道安装的需要。
其三维坐标值测设值与设计值较差小于3毫米。
2、盾构机姿态测量。
在盾构始发前测设盾构机初始位置和盾构机姿态。
盾构机自身导向系统成果必须和人工测量结果一致。
本工程使用的是力信RMS-D导向系统。
盾构初始姿态我们利用特征点发和分中发分别独立测量了,两次结果一致。
盾构初始姿态测量,是盾构测量独有的测量。
三、盾构管片测量盾构机在推进过程中,利用力信RMS-D导向系统,控制盾构机本身姿态。
但是管片测量也不可忽视。
可以利用管片测量结果观察隧道推进情况。
做到多重复合。
人工测量管片使用的是标尺法(如图2所示),测设出反射片的三维坐标,根据隧道半径算出隧道中心。
现已310环隧道导向系统测量姿态和人工测量管片姿态为例进行比较。
盾构新型自动导向测量系统研究
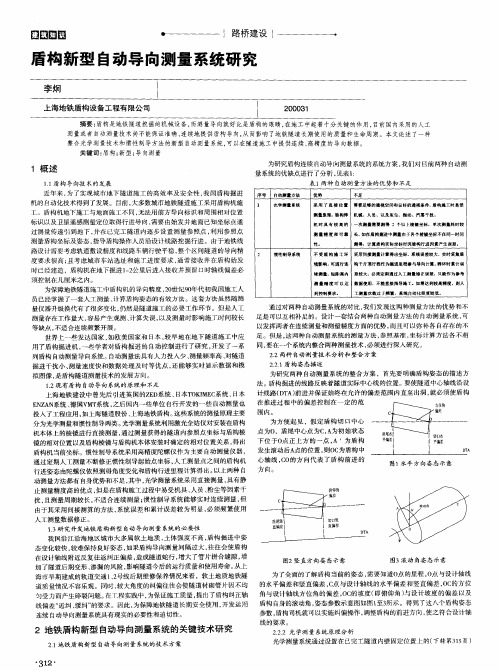
为保 障地 铁 隧道施 工 中盾 构机 的 导 向精度 , 2 0 世纪9 O 年 代初 我 国施 工 人
员 已经掌 握 了一 套人 工测 量 、 计 算盾 构 姿态 的有 效方 法 。这 套 方法 虽 然 随测
量仪 器 升级换 代 有 了很 多变 化 , 仍然 是 隧道 施工 的 必要 和不 足
序号 冉动涮量方法 优势 不 足
近年 来 , 为 了实现 城 市 地 下隧 道 施工 的高 效率 及 安全 性 , 我 国 盾构 掘 进 机的 自动 化技 术 得到 了发 展 。 目前 , 大 多数城 市 地铁 隧 道施 工采 用 盾构 机 施 工 。盾构 机地 下 施工 与地 面施 工 不 同 , 无法 用前 方导 向标识 和 周 围相对 位 置 标识 以 及卫 星遥 感测 量 定位 取得 行进 导 向 , 需要 由始发 井 地面 已 知坐标 点通
1 . 2 现 有盾 构 自动 导 向 系统 的 原理 和 不足
2 . 2两种 自动测 量技 术分析 和 整合 方案
2 . 2 1盾 构姿 态描 述
为 研究 两 种 自动 测 量 系统 的 整 合方 案 ,首 先 要 明确 盾 构姿 态 的 描述 方 法 。盾构 掘 进的 线路 反 映着 隧道 实 际 中心线 的位 置 。 要 使 隧道 中心 轴线 沿设
须 控制 在 几厘 米 之内 。
性.
涮得.计 算腐绚安酥坐标 时曝后构 行进因素产生 误差。
惯性制导蕉 坑
受 腊 梅 施 工王 f = 采用间接 测量计算褥 出 坐 标. 囊 绕误基投 犬. 实对采羹 盾
境影 响, 可进 行涟 掏千 斤 顶 行程作为掘进 壁程参 与导向计算 . 辞环时 曼 诗 误 续蠢量, 醺雕 寓内 差较 大, 必须 定期通过人 工 铡 曩捧 正 撰差 ,只 齄作 为参考 灏 量精 度 可 以选 教据使 用.不能直接指导 艟工.妞搿选到 较离精度,则人 到掩制要求 . 工涮 量次数过 r频繁.系统 内动化程度段 低.
试论隧道盾构法施工中的测量技术

试论隧道盾构法施工中的测量技术盾构法在应用的过程中不会对周围的土壤环境造成较大的影响、不用消耗太多人力、施工安全高效、不影响地面交通、整体的适应性比较强,所以在隧道施工中应用的较为普遍。
但是隧道在施工的过程中整体的距离比较长,前方路段设备比较多,整体施工环境较为复杂,在开展测量工作的过程中就存在着许多困难,想要保证各方面测量数据的精准性,则需要选择合理的测量手段,为隧道盾构法施工的安全、高效提供保障。
一、主要工程阶段测量1、联系测量在盾构隧道贯通测量中竖井联系测量是重要的组成部分,在所有检测缓解当中占据重要地位。
竖井联系测量主要作用是将地面控制点的坐标、方位角和高程传递到地下隧道当中,这样一来地上和地下的控制网就被联系在同一个平面和高程系统当中,从而测算出隧道施工的相关数据,指导盾构机的推进,保证隧道的正确贯通。
2、始发测量(1)测量盾构机安装。
盾构机安装主要包括两个部分,即反力架和始发台,两者可以在盾构机始发时提供初始推力以及初始的空间姿态。
在安装反力架和始发台时,需要注意以下几点:反力架左右偏差应控制在±10mm之内,高程偏差应控制在±5mm之内,上下偏差应控制在±10mm之内。
始发台水平轴线的垂直方向与反力架的夹角偏差应在±2‰范围内,盾构姿态与设计轴线竖直趋势偏差应小于±2‰,水平趋势偏差应在±3‰范围内,轴线方位角误差应控制在合理范围内。
注意一定要保证如上几点,不然会影响盾构机的正常运行,影响工作状态甚至发生危险。
(2)测量定位盾构机导轨。
测量定位盾构机导轨注意点很多,主要注意事项有:保证原设计的隧道中线与施工中控制导轨的中线偏差不能超限,保证坚实平整的导轨基面。
(3)测量初始盾构机姿态。
在测量初始盾构机姿态时重点测量盾构机刀盘中心三维坐标以及俯仰角、横摆角、扭转角等方面。
盾构机姿态控制是盾构机应用过程中的重要内容,其对后续的测量结果有着直接影响,对其进行质量上的控制可以保证施工精度。
盾构隧道施工测量技术的探讨

盾构隧道施工测量技术的探讨地铁工程的测量师建设和地下表面工程建筑的测量工作,主要是地下施工运营、地下勘察设计等各个阶段的测量工作。
盾构隧道施工测量技术的任务就是在规定的时间之内和误差之内保证工程的正常进行,保证工程可以按照施工设计完成。
本文主要根据地铁施工中盾构施工测量技术的特点,对盾构隧道施工测量技术做出一些简要的分析。
标签:盾构;隧道施工;测量技术1 概述盾构隧道测量技术盾构隧道施工测量技术的实施就是为了保证地铁施工在规定的时间之内完成任务。
盾构法在隧道工程的施工中,需要测量的工作内容很多,主要包括地面控制测量、联系测量、地下控制测量、隧道施工测量等等,地面控制测量就是在地面上建立平面网;联系测量是将地面上的坐标和方向传到施工地下,从而建立统一的坐标;地下控制测量与地面控制测量类似,就是在地下建立平面网;隧道施工测量主要是根据隧道施工设计图知道开挖的中线和高程测量。
盾构隧道施工测量法是在地下暗挖隧道的一种施工方法,盾构就是一种支持地层压力和在地层中活动的钢管结构,盾构隧道施工测量方法在我国的一线城市应用比较广泛,在北京、上海这种隧道施工技术得到很好的应用,盾构隧道施工测量技术与传统的地铁施工方法相比较最主要的优点就是安全、快速可以在不影响周边环境和建筑、交通的情况下开展施工,不被地面的气候影响,但是受到地下的水文地质条件的影响,需要根据不同的地层和硬度采取有针对性的测量设计方法,盾构隧道施工测量技术是加快我国地下铁路发展的有效方式,确保地铁施工安全高效进行。
盾构测量技术施工测量在地铁施工技术的主要作用可以在地铁施工中校准中心线和高程,为地铁施工准确定位方向和位置,地铁施工中开挖断面可以保证施工的中心线在正确的设计要求中保证开挖的限额度,保证地铁施工设备的正确暗转和合理构造,为地铁施工测量技术的设计和管理提供完整的数据,保障隧道设计和盾构机的正常运行,保证盾构机在进入隧道之后可以接受准确的测量数据,从而完善盾构隧道施工测量技术的精准度。
盾构施工人工测量与自动测量的方法分析
盾构施工人工测量与自动测量的方法分析摘要:盾构施工中的掘进方向控制和高程控制直接决定了工程项目的质量、成本以及安全性,因此就需要在盾构施工中要采用可靠的技术测量这些关键的参数。
目前主要利用自动测量方法监控盾构机的实时姿态和掘进方向,同时利用人工方式加以检验,提高测量的可靠性。
研究以上两种测量路径的基本实现原理,并分析了其具体应用场景。
关键词:盾构施工;人工测量;自动测量;方法引言:在盾构施工中,自动测量方法可实时显示测量结果,实现全程监控,人工测量在效率上有所欠缺,通常只能在施工暂停的间隙开展人工测量,但这两种测量方式在盾构掘进控制中都是不可缺少的技术,二者要实现相互配合,全面提高盾构测量的可靠性和准确性,对这两种测量方式开展研究具有重要的工程指导意义。
1.测量在盾构施工中的重要性盾构机在地铁、高铁以及其他地下工程的施工中发挥着非常关键的作用。
以最常见的地铁施工为例,盾构机呈现出掘进效率高、安全风险可控、环境扰动小等一系列技术优势。
但地下掘进施工的关键是控制好方向,地铁线路要按照设计图纸经过多个站点,相邻站点之间尽可能保持直线,这样可减少路线整体长度、降低车站和线路的建造成本以及提高工程效率。
盾构机械在地下空间作业,方向测量是非常关键的一道工序,并且伴随着整个掘进过程。
一旦放线测量失误,整体的掘进线路就会发生偏移,盾构机械的瞬时位置是测量过程中的关键因素,测量的基本原理是在盾构机的特定位置设置专门的检测参考点,然后使用专业化的工具测量其位置变化,借此来实现盾构方向的全程控制[1]。
1.盾构施工测量方法分类(一)盾构施工人工测量方法第一,标尺测量。
这种测量工具可用于检测盾构机的管片是否存在偏差的问题。
在盾构机内部设置有专门的参考坐标,其位置位于盾尾内壳的铝合金尺上,利用水平标尺测量贴在其表面的三维坐标,获得数据之后,根据测量点与盾构机头部和尾部的距离关系,即可计算出其当前是否存在首尾方向上的偏差,这种方法在弯曲度较大的盾构作业中难以发挥作用,更加适用于直线段的测量,但整体精度偏低。
盾构施工人工测量与自动测量的原理与方法
盾构施工人工测量与自动测量的原理与方法发表时间:2020-12-10T11:27:27.947Z 来源:《基层建设》2020年第23期作者:李健健[导读] 摘要:随着我国城市化步伐的加快,盾构施工技术在穿越复杂地质施工方面具有极高的安全性和高效性,因此被广泛应用于地铁建设中。
甘肃省庆阳市镇原人 744500摘要:随着我国城市化步伐的加快,盾构施工技术在穿越复杂地质施工方面具有极高的安全性和高效性,因此被广泛应用于地铁建设中。
其具体采用的施工工艺与传统的暗挖隧道施工工艺存在明显区别,在实际测量中,相对于传统的测量方法,存在密切相关性的同时,也有很多明显的区别之处。
基于此,本文对盾构施工人工测量与自动测量的原理与方法进行分析。
关键词:盾构施工;人工测量;自动测量;方法 1盾构施工技术解析盾构法是暗挖法施工中的一种全机械化施工方法。
它是将盾构机械在地中推进,通过盾构外壳和管片支承四周围岩防止发生往隧道内的坍塌。
同时在开挖面前方用切削装置进行土体开挖,通过出土机械运出洞外,靠千斤顶在后部加压顶进,并拼装预制混凝土管片,形成隧道结构的一种机械化施工方法。
地铁隧道盾构施工技术国内最早应用于1996年广州地铁建设,在此项目中运用盾构施工技术不仅有效的提高了隧道施工的速度,节约了大量人工,更重要的是为地铁隧道在复杂的城市地质环境中提供了有力的安全保障。
自此之后盾构施工技术便广泛应用于各大城市地铁隧道的建设之中。
2盾构机测量方法 2.1标尺法标尺法是常见的人工测量方法之一,能够对环片偏差进行测量。
其基本原理如下:水平摆放在盾构机中的标尺的中心位置有一坐标,施工人员首先需要测量这个坐标,并在此基础上利用几何关系进行前后胴体中心坐标的推算。
推算完成后,施工人员将推算结果与隧道设计轴线进行比较,最终得到两者之间存在的偏差。
2.2三点法三点法进行测量的主要步骤为以下几个阶段:组装盾构机阶段,施工人员进行螺母的焊接工作。
浅谈地铁盾构施工测量控制
浅谈地铁盾构施工测量控制随着城市的快速发展,地铁交通作为便捷、高效、环保的交通方式已经成为了很多大城市的首选。
地铁建设从早期的露天施工到现在的地下隧道施工,在过去的数十年中,随着技术的飞速发展,盾构技术越来越广泛地应用于地铁建设中,因其施工效率高、质量好、对周围环境影响小等优点,已成为了地铁隧道建设的主流技术。
然而,为了保证盾构施工的安全和质量,必须采用适当的测量控制方法。
下面我们就来谈一下地铁盾构施工测量控制的相关内容。
盾构施工是一个技术含量极高、流程复杂的工程,需要在施工过程中进行多种工作,如隧道施工、巷道掘进、地下空间开挖等,这些工作数量繁多、难度大,对测量控制提出了较高的要求。
在盾构施工中,测量控制工作主要完成以下内容:(一)地面预测:包括地下管线预测、地下岩层结构预测等,通过对地下物体的探测和分析,提前发现和解决地面预测问题,为盾构施工的顺利进行提供保障。
(二)盾构参数控制:包括盾构掘进速度、姿态角度、水平偏差、垂直偏差等,通过对盾构施工参数的实时监测和调整,保证施工过程中的质量和安全。
(三)工程测量:包括盾构曲线测量、轴线测量、断面测量、环缝测量、圆心偏差测量等,通过对盾构施工中的各项参数进行测量并进行科学分析,保证工程质量符合要求。
在地铁盾构施工中,测量控制是一个关键环节,需要采用专业仪器设备进行测量控制,以保证施工的安全和质量。
(一)全站仪和激光仪全站仪和激光仪是地铁盾构施工中常用的测量仪器,可以实现对盾构施工中各项参数的实时监测和测量。
全站仪主要用于盾构施工的测量,可以提供高精度的数据,减少了人工误差的影响。
激光仪则一般用于地铁线路的控制和水平面的校正,能够检测到施工前后的地面高度变化,以及地面与隧道顶部的高度差等。
(二)遥感技术随着科技的不断发展,遥感技术在地铁盾构施工中的应用越来越广泛,主要应用于建设前期的地形和地貌调查和设计,以及在施工过程中对地下障碍物的检测和隧道发生塌陷时的情况掌握等,是地铁建设中必不可少的技术。
城市地铁盾构施工测量若干问题的探讨
城市地铁盾构施工测量若干问题的探讨摘要:在地铁施工中,地铁盾构施工是其中非常重要的技术环节之一,盾构隧道施工测量技术的任务就是在规定的时间之内和误差之内保证工程的正常进行,保证工程可以按照施工设计完成。
本文主要根据地铁施工中盾构施工测量技术的特点,对盾构区间施工测量技术做出一些简要的分析。
关键词:地铁盾构;施工测量;问题1前言盾构施工技术以其安全高效、可穿越复杂底层的特点,被广泛应用于地铁工程施工中,与传统的地铁开挖施工法相比,盾构施工技术不仅安全、快速,而且不会对地面交通正常运行造成不良影响。
盾构法施工中所采用的有效合理的测量措施,是确保工程施工安全、高效的重要保障。
2地铁隧道盾构施工技术盾构(Sheild)隧道开挖是城市地下施工的主要手段,其是一种特殊形状钢筒结构,不仅能够支撑地层压力,而且还能够在地层中推进,在不断推进过程中,完成隧道挖掘、支护等,其应用优势在于在钢结构的掩护下,能够避免发生地面塌陷和坍塌事故。
另外,机械化程度比较高,如果地质条件比较复杂,则可以采用盾构施工技术。
3工程概况某地铁八标段区间隧道设计里程范围为SK13+680.336~SK14+561.785,总长为881.449m。
在盾构区间沿线有很多高层建筑,隧道施工区域地下管线复杂,路面交通繁忙。
综合考虑施工技术条件以及施工现场环境,选用盾构区间施工技术。
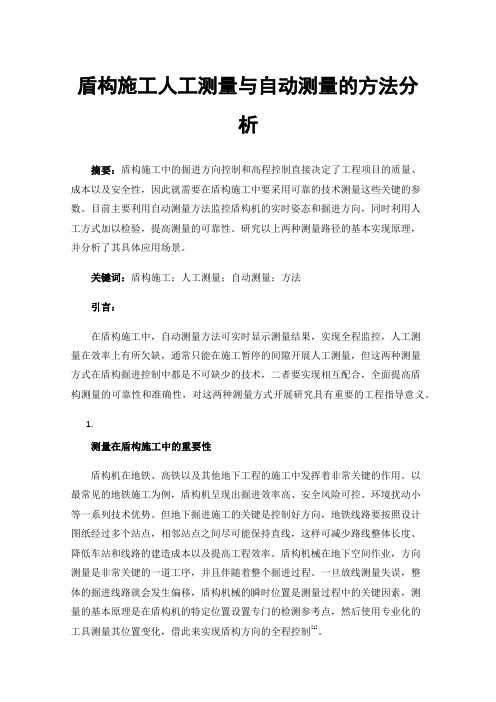
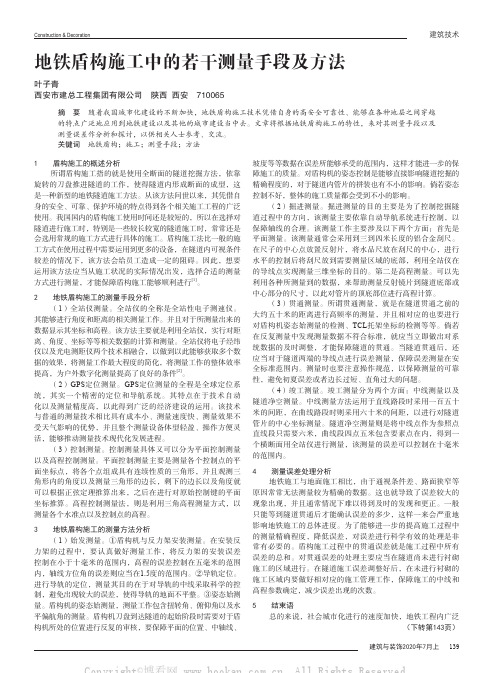
4盾构区间施工测量技术4.1盾构机姿态测量原理盾构机在进行隧道掘进施工中,对刀盘的中心坐标测量,可以采用间接推算的办法。
O点指的是盾构机刀盘中心,A、B分别指的是在盾构机前体以及中体交接处螺旋机根部的两个选择点;C、D分别指的是螺旋机中段靠近下侧位置的两个点,而E指的是盾构机中间体断面的中心坐标。
在A、B、C、D这四个点上,都需要贴上测量反射片。
A、B、C、D、O这五个点可以构成两个四面体,在测量过程中,首先对各个角点的三位坐标进行测量,即(xi,yi,zi),然后将四个对应点之间的相对位置关系进行计算,同时,还需要对六条边的长度进行计算,记为Li,将此作为计算初始值。
地铁盾构施工中的若干测量手段及方法
坡度等等数据在误差所能够承受的范围内,这样才能进一步的保 障施工的质量。对盾构机的姿态控制是能够直接影响隧道挖掘的 精确程度的,对于隧道内管片的拼装也有不小的影响。倘若姿态 控制不好,整体的施工质量都会受到不小的影响。
(2)掘进测量。掘进测量的目的主要是为了控制挖掘隧 道过程中的方向,该测量主要依靠自动导航系统进行控制,以 保障轴线的合理。该测量工作主要涉及以下两个方面:首先是 平面测量。该测量通常会采用到三到四米长度的铝合金刮尺。 在尺子的中心点放置反射片,将水品尺放在刮尺的中心,进行 水平的控制后将刮尺放到需要测量区域的底部,利用全站仪在 的导线点实现测量三维坐标的目的。第二是高程测量。可以先 利用各种所测量到的数据,来帮助测量反射镜片到隧道底部或 中心部分的尺寸,以此对管片的顶底部位进行高程计算。
4 测量误差处理分析 地铁施工与地面施工相比,由于通视条件差、路面狭窄等
原因常常无法测量较为精确的数据。这也就导致了误差较大的 现象出现,并且通常情况下难以得到及时的发现和更正。一般 只能等到隧道贯通后才能确认误差的多少,这样一来会严重地 影响地铁施工的总体进度。为了能够进一步的提高施工过程中 的测量精确程度,降低误差,对误差进行科学有效的处理是非 常有必要的。盾构施工过程中的贯通误差就是施工过程中所有 误差的总和。对贯通误差的处理主要应当在隧道尚未进行衬砌 施工的区域进行。在隧道施工误差调整好后,在未进行衬砌的 施工区域内要做好相对应的施工管理工作,保障施工的中线和 高程参数确定,减少误差出现的次数。
浅谈地铁盾构施工测量控制

浅谈地铁盾构施工测量控制地铁盾构是一种在地下开挖隧道,同时进行支护和衬砌的机械化施工方法。
在盾构施工过程中,测量控制起着至关重要的作用,它可以确保施工的精度和安全。
本文将就地铁盾构施工中的测量控制进行浅谈。
测量控制在盾构施工中的作用不可忽视。
地铁盾构施工需要准确测量隧道的位置、方向、高度等参数,以确保隧道的准确开挖和对接。
测量控制通过使用现代高精度的测量仪器,可以实时监测盾构机的位置和姿态,根据控制点的坐标进行各项参数的追踪和调整。
测量控制也可以对盾构机的开挖进度进行实时监测和调整,确保施工进度的合理安排。
测量控制还可以提高盾构施工的安全性。
地铁盾构施工时,需要面对复杂的地质条件和临近建筑物的限制,施工安全成为首要考虑因素。
测量控制可以通过监测盾构机的位移和姿态,发现地质变形和工况异常等问题,及时进行调整和处理,避免发生意外事故。
测量控制还可以通过实时监测施工现场的噪音、振动等环境因素,保护周围环境的安全。
为了保证测量控制的准确性和可靠性,还需要加强施工队伍的培训和技术水平的提高。
在盾构施工中,测量控制是一个复杂的工程,需要专业的测量人员和工程技术人员共同合作。
他们需要熟悉各种测量仪器的使用原理和操作方法,能够准确解读和分析测量数据,并根据实际情况做出及时调整和处理。
在施工过程中,还需要保证测量仪器的正常维护和保养,避免因测量仪器故障引发不必要的错误。
地铁盾构施工测量控制起着至关重要的作用。
通过准确测量和实时监测,可以确保盾构施工的精度和安全,并为施工队伍提供准确的数据支持,保证施工进度的顺利进行。
需要加强施工队伍的培训和技术水平的提高,以保证测量控制的准确性和可靠性。
希望通过不断完善测量控制技术,可以提高地铁盾构施工的效率和质量,为城市交通建设做出更大贡献。
地铁盾构施工测量若干问题的探讨
地铁盾构施工测量若干问题的探讨1.盾构隧道测量概述地下工程测量是指建设和运营地表下面工程建筑物需要进行的测量工作,包括地下工程勘察设计、施工和运营各个阶段的测量工作。
地下工程测量的任务是保证线状工程在规定误差范围内正确贯通,保证面状工程按设计要求竣工。
盾构法因为其独特的工艺特点和较为经济的特点,在隧道施工中被广泛采用。
采用盾构法隧道工程施工,测量工作需求如下:1)、地面控制方面的测量:建立地面上的平面模型,建立地面上的控制网;2)、联系测量方法:将地面上的X、Y、Z坐标、地面方向和高程传递到地面下,建立地面上和地面下一致的坐标系统;3)、地面下的控制测量方法:地面下以及高程控制;4)、隧道内部施工测量:考虑隧道的设计方案,从而放样。
以上测量作业的作用是:1)、使得地面下的工程建筑物的设计中心线以及高程被标出,定下开挖方向、衬砌及施工的位置。
2)、在开挖面工程进程中,按照平面及高程的设计方案,保证施工中线正确贯通,保证开挖在界线以内,保证在贯通工程完成前,所有建筑物能准确的建造。
3)、使得工程设备被及时正确安装;4)、给相关管理部门和设计所提供详细的完工测量材料等。
盾构施工测量要随时随刻的盾构机工程的瞬时姿态,还要使得盾构机按照隧道的设计中线运行。
为盾构操作相关工作者提供正确的盾构机姿态参数,让他们测定出隧道衬砌环的安装质量。
让盾构机按照开始时井经区隧道正确的驶入接收井中,在很精确的精度下完成盾构法隧道工程测量。
2.贯通误差盾构法隧道施工中,地面上的控制测量误差、地面下控制测量误差、以及细微部放入样时的误差,多种误差的叠合,影响到开挖工程中工作面的中线不能良好连接,发生的错开情况叫做贯通误差。
隧道被贯通后,应立刻测定当时的X、Y、Z方向上的贯通误差。
地铁的工程一般比较巨大,基本上都是有很多个单位混合施工的。
施工和测量的误差肯定存在,各个施工单位在工程中的施工中线不可能严格的处于开始的设计处,就必须会减缓隧道衬砌和轨道铺设工程的开展。
盾构施工测量技术(DOC)
盾构施工测量技术盾构是一种重要的地下建筑施工技术,也是地下铁道、管道等重要交通基础设施建设的关键技术之一。
在盾构施工中,测量技术是非常重要的一环,能够有效地保证施工的质量和进度。
本文将介绍盾构施工测量技术的相关内容。
一、盾构施工测量工作的目的盾构施工测量工作的主要目的是:1.确认隧道的轴线及其地貌特征;2.分析隧道的地质条件及稳定性;3.确定隧道工作面的位置和方向;4.监测隧道结构的位移和变形;5.评价和控制隧道施工质量。
二、盾构施工测量的方法盾构施工测量主要采用以下方法:1.传统测量法传统测量法主要包括三角测量、水平测量、高程测量、方位角等传统测量方法。
这种方法的优点是精度高,缺点是测量效率低,需要投入大量人力物力。
2.全站仪测量法全站仪是一种高精度的测量仪器,其能够满足盾构施工测量的高精度要求。
全站仪测量法是一种快速、高效的测量方法,能够准确地获取隧道轴线、隧道地貌、隧道变形等信息。
3.三维激光扫描法三维激光扫描法是一种先进的测量方法,它可以直接获取隧道内部的三维点云数据,对隧道的结构进行完整的建模和分析。
这种方法最大的优点是测量效率高,精度高,可以快速获取隧道内部信息。
三、盾构施工测量技术的实施盾构施工测量技术的实施主要包括以下几个阶段:1.规划阶段:在盾构施工规划阶段,要制定详细的测量方案,确定测量的范围和精度要求。
2.施工前期:在盾构施工的前期,要进行初步测量,确定盾构轴线和地貌等信息,以及确定隧道工作面的位置和方向。
3.施工中期:在盾构施工的中期,要采用全站仪、激光扫描等测量方法,对隧道轴线、地貌以及隧道结构进行测量和监测。
4.施工后期:在盾构施工的后期,要对隧道结构进行最终验收测量和结构监测,并进行开挖指数控制。
四、盾构施工测量技术的应用盾构施工测量技术在地下建筑施工中有着广泛的应用,包括地铁、管道、电缆隧道等建设项目。
盾构施工测量技术能够提升施工进度和质量,控制地下建筑施工质量和安全。
浅谈自动测量系统与人工测量相结合在盾构施工中的应用
浅谈自动测量系统与人工测量相结合在盾构施工中的应用摘要:随着盾构施工技术的不断发展,自动测量系统因其可降低测量人员作业强度、测量时不影响正常施工、提高施工质量等优越性而得到了越来越广泛地应用。
可自动测量系统一旦出现错误了该怎么办呢?这时就显示出了人工测量的必要性。
本文简要介绍了自动测量系统的组成与工作原理,并结合天津市地铁3号线14C标段津围公路站~宜兴埠站盾构区间简述了自动测量系统与人工测量相结合的方法指导盾构掘进在实践中的应用。
关键词:盾构、自动测量系统、人工测量Abstract:With the development of construction technology in shield tunning, automatic measuring system are being used more and more widely Because of its properties , it can be reduced operation intensity, not influence the normal construction in survey, improve the quality of construction. What should we do if there has some problem in automatic measuring system ? Here shows the necessary of man-measurement.This paper introduced the composition and operational principle of automatic measuring system, based on the case ofjinwei road station to yixingfu station of Tianjin subway line 3 14C bid package, it introduces the application in EPB shield tunning that automatic measuring system with the man-measurement .Key words: shield, automatic measuring system, manual measurement1.演算工房自动测量系统在盾构施工过程中,为了避免盾构机发生意外的运动和方向的突然改变,必须对盾构机的位置与隧道设计轴线的相对位置关系进行持续地监控测量,使盾构机能够按照设计路线精确地推进。
盾构施工人工测量与自动测量的原理与方法
盾构施工人工测量与自动测量的原理与方法沈阳(中铁二十二局集团轨道工程有限公司,北京100040)【摘要】盾构施工既可以采用人工测量,又可以采用自动测量。
本文对实际的工程数据进行仔细研究,在数据分析的基础上对不同测量方法的精度、可操作性等指标进行比较和分析。
研究结果表明:人工测量的作用之一就是对自动测量的准确性进行检验和校准。
在测量精度有保证的前提下,人工测量和自动测量各有侧重,前者侧重对测量部分的控制,后者侧重对施工进行测量。
在实际的操作过程中,应将两者有机结合到一起,优势互补,促进盾构隧道的贯通。
【关键词】盾构施工;人工测量;自动测量;测量方法【中图分类号】U455.43【文献标识码】A【文章编号】2095-2066(2020)03-0167-021盾构机施工测量在实际操作的过程中,为避免隧道整体受到盾构机轴线与设计轴线偏差的影响,施工人员应尽量控制盾构机的姿态,保证盾构机的掘进方向与设计轴线在一条直线上,不发生偏移现象。
隧道的瞬时位置是目前盾构姿态测量的最主要目标,测量后施工人员还应确认盾构机的瞬时位置,使盾构机的瞬时位置满足设计和规范的要求。
施工人员应采用科学的工具和方法对盾构机掘进时的瞬时位置进行确认,保证位置的准确性。
首先,测量采用的主要工具是全站仪和其他辅助工具。
其次,施工人员应在盾构机上合理设置标志点。
标志点的设置应根据盾构机的特点合理进行设置。
最后,标志点设置完成后,施工人员对盾构机掘进时的瞬时位置进行准确判定,判定采用的方法主要是几何计算法。
盾构姿态测量既包括姿态角的测量,又包括空间位子的测量。
2盾构机测量方法2.1标尺法标尺法是常见的人工测量方法之一,能够对环片偏差进行测量。
其基本原理如下:水平摆放在盾构机中的标尺的中心位置有一坐标,施工人员首先需要测量这个坐标,并在此基础上利用几何关系进行前后胴体中心坐标的推算。
推算完成后,施工人员将推算结果与隧道设计轴线进行比较,最终得到两者之间存在的偏差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
盾构施工人工测量与自动测量技术探讨
发表时间:2018-09-17T09:47:03.810Z 来源:《基层建设》2018年第20期作者:王强1 毛俊涛2
[导读] 摘要:随着城市建设的飞速发展,我国在各大城市都开展了地铁建设,为了满足盾构掘进按设计要求贯通(贯通误差必须小于
±50mm),必须研究每一步测量工作所带来的误差,包括地面控制测量,竖井联系测量,地下导线测量,盾构机姿态定位测量4个阶段。
1浙江省大成建设集团有限公司 310012;2杭州市地铁集团有限责任公司运营分公司 310014
摘要:随着城市建设的飞速发展,我国在各大城市都开展了地铁建设,为了满足盾构掘进按设计要求贯通(贯通误差必须小于
±50mm),必须研究每一步测量工作所带来的误差,包括地面控制测量,竖井联系测量,地下导线测量,盾构机姿态定位测量4个阶段。
关键词:盾构施工;人工测量;自动测量技术
盾构法具有施工速度快、机械化程度高、人员配备少、不影响地面交通等优点,所以在地铁区间施工中得到广泛应用。
盾构施工测量是盾构施工中最重要的环节之一。
1工程概况
上海市轨道交通12号线顾戴路站~东兰路站区间:区间出顾戴路站端头井后下穿顾戴路北侧规划公园,自顾戴路折向万源路,然后沿万源路下向北进行,下穿万源路地块后,线路左、右线分离,分别从东西侧绕僻万源路桥桩基,下穿漕河泾港。
过东兰路后进入东兰路站。
本段区间较长,里程范围为SK+411.527~SK5+080.520,长度为1668.993。
上行线有5段曲线,曲线半径依次为370m、1200m、650m、
1000m、1000m。
线路纵断面最小坡度2‰,最大坡度25‰。
隧道覆土最小为10.0m,最大为22.2m。
本区间为双线单圆盾构区间,在最低点设置旁通道(兼排水泵站)1座。
2盾构掘进测量
2.1人工测量
(1)盾构测量标志的安装及测定测量标志由前靶、后靶、横向坡度、纵向坡度组成,具体实物为前后测量徕卡反射贴片和坡度板(纵向和横向坡度都可测),进行安装时,先测量出盾构的轴线,并把贴片和坡度板固定在盾构中心线上,前标后标应具有足够的长度,前靶距切口越近越好。
测量出前靶、后靶到盾构中心线的距离以及前靶到切口的距离、后靶到盾尾距离,以确定前后靶与切口盾尾坐标归算的几何关系。
为确保整个施工期间不被破坏,设置保护记号,此项工作应有原始记录和校核记录,以免盾构标志数据中存在系统误差。
初次测量时,用仪器照准前、后占牌各测量一个测回,再根据坡度板的数值确定盾构的初始姿态,方便盾构始发及时纠正。
(2)人工测量的相关计算确定好前后靶与切口盾尾坐标归算的几何关系后,编制相关计算器程序,人工测量主要测设前标水平角,后标水平角,前标垂直角,后标垂直角,坡度和转角。
人工测量仪器为经纬仪和坡度板。
测设完相关数据后进行计算。
①盾构计算:坡度W和转角U在坡度板上直接读出;设W=2.546m为前标至盾构中心轴线的距离,Z=2.391为后标至盾构中心轴线的距离;G、H为经纬仪所在测站X、Y坐标,L为测站到后标方位角,R为经纬仪棱镜高程;I=1.2×T-x:I为经纬仪所在测站到前标的平距,T为当前环号,根据所测当前环号,反算得x,x是测站到第一环的距离。
每次转站都要更新。
N=1.2×T-y:N为经纬仪所在测站到后标的平距,原理同上;K=测站里程+I+5.308:K为切口里程,5.308是前标到切口的距离。
测站的里程,是从第一个测站开始累加起来,每次加上新测站到上一测站的平距;E=X-arcsin ((sinU×Z)÷N)+L-180:X为后标水平角,E为修正过的测站到后标的水平方位角;F=Y-arcsin((sinU×W)÷I)+L-180:Y为前标水平角,F为修正过的测站到前标的水平角;A=G+I×cosF:B=H+I×sinF:C=G+N×cosE:D=H+N×sinE;"QKZ"=R+I×cosQ+(1-cosU)×W-W+5.3082"DWZ"=R+I×cosQ+(1-cosU)×W-W-3.8252Q为前标垂直角;POL(C-A,D-B):
E=J+180"QKX"=A+5.308×cosE"QKY"=B+5.308×cosE"DWX"=C+1.326×cosE"DWY"=D+1.326×cosE得出三维坐标与设计轴线比较即可得出偏差。
②管片姿态测量管片姿态=盾构轴线上管片拼装位置的偏离值计算+管片偏离盾构轴线计算的叠加。
A、B、C、D分别为管片拼装完成后上右下左与盾壳之间间隙;E、O为切口平偏和高偏,G、Q为盾尾平偏和高偏;K=测站里程+I+5.308-6.73;K为管片里程,6.73为切口至当前环拼装好的管片的距离;"SPZJ"=5550-A-C;为水平直径"CZZJ"=5550-B-D;为垂直直径"GPC"=(L-S)
÷L×G+S÷L×E+(C-A)÷2000"GGC"=S÷L×O+(L-S)÷L×Q+(B-D)÷2000L为盾构长度,S为管片前端至盾尾的距离。
2.2自动测量
为了做到对盾构机姿态的实时控制,盾构机掘进中采用盾构姿态自动监测系统。
该系统是盾构机自动导向测量系统,采用ROBOTEC 隧道导向系统,具有国际先进水平,适用于隧道工程施工控制的自动测量系统。
采用该系统能够确保实时、准确地控制隧道掘进,保证贯通的精度。
(1)自动测量导向系统本自动测量系统安装了3个棱镜,前靶一个,后靶两个(只用一个,一个备用),安装测定与人工测量相同。
在盾构始发前,对整条隧道每一米的三维坐标计算出来,输入自动测量系统,方便实测数据与其对比计算偏差。
(2)自动测量盾构姿态计算原理盾构机作为一个近似的圆柱体,在开挖掘进过程中我们不能直接测量其刀盘及盾尾的中心坐标,只能用间接法来推算出中心的坐标。
A点是盾构机刀盘中心,E点是盾构机盾尾断面中心点,即AE连线为盾构机的中心轴线,布置三个自动棱镜B、C、D。
由A、B、C、D、四点构成一个四面体,在盾构始发前测量出B、C、D三个角点的三维坐标(xi,yi,zi)和刀盘盾尾中心的三维坐标,建立几何关系。
根据三个点的三维坐标(xi,yi,zi)分别计算出LAB,LAC,LAD,LBC,LBD,LCD,四面体中的6条边长,作为以后计算的初始值,在盾构机掘进过程中Li是不变的常量,通过对B、C、D三点的三维坐标测量来计算出A点的三维坐标。
同理,B、C、D、E四点也构成一个四面体,相应地求得E点的三维坐标。
由A、E两点的三维坐标就能计算出盾构机刀盘中心的水平偏航,垂直偏航,由B、C、D三点的三维坐标就能确定盾构机的仰俯角和滚动角,从而达到检测盾构机姿态的目的。
3两套测量控制技术的比较
两套测量系统、相互校核,不断修正,主要相互验证测量数据计算的准确性和测量仪器的误差。
通过比较两者最大相差在2厘米左右,在规定的容许范围之内。
依据自动测量系统提供的数据进行推进,管片脱出盾尾后对管环进行复测,可发现偏差基本都在5cm之内,所以本工程大部分数据依据自动测量系统,节省大量劳动力。
4总结
上海市轨道交通12号线顾戴路站~东兰路站区间区间长度为1668.993m,是一般隧道的2倍左右,且曲线多、部分曲线急且长,导致导线边数多且部分导线长度较短,而这些导线又不能闭合,直接导致盾构贯通误差的增大。
在半径为350m的小曲线推进时,由于隧道曲率大,前方可视距离短,导致自动与人工测量移站频繁。
在本工程中,在R=350m的圆曲线隧道上,平均要20环(24m)换站一次。
每次换站
完成后,进行一次测量复核,调整自动与人工测量的相关数据。
由于测量距离短,测量站安装在尚未完全稳定的管片上,所以每次换站完成后,高程数据总有一定的变化。
为了保证测量数据的准确性,每天进行一次复核,及时调整相关数据。
这些因素给本区间的盾构推进导向测量工作增加了很大的难度,为了本区间盾构的顺利推进和准确进洞贯通,就必须制订周密的导向测量方案,并且在导向测量技术应用中采取合理有效的措施。
5结论
把计算得出的盾构机姿态与自动导向系统在计算机屏幕上显示的姿态作比较,根据实践经验,只要两者的差值不大于10mm,就可以认为自动导向系统是正确的。
在某地铁六号线某盾构标段已推进的300多米隧道中,曾多次采用棱镜法检核盾构机姿态,两者的偏差值较差均不大于10mm,证明了该方法在检核自动导向系统的正确性是可靠有效的。
参考文献: [1]邱明明,杨果林,吴镇清,姜安龙,林宇亮.双孔平行地铁隧道盾构施工地表沉降分布规律研究[J].现代隧道技术,2017,54(02):96-105.
[2]胡长明,陆征宇,梅源,张文萃,张钰.软土地层地铁盾构施工风险可拓评估方法研究[J].安全与环境学报,2017,17(01):21-26.
[3]陈鑫超.地铁盾构施工引起的地表沉降研究[D].南京理工大学,2017.
[4]王志良,瞿嘉安,申林方,徐则民,丁祖德.泥炭质土层盾构施工扰动引起隧道长期沉降的研究[J].岩土工程学报,2017,39(08):1416-1424.。