机械振动5多自由度系统的振动9对任意激励的响应
多自由度系统的振动
m1x1 2kx1 kx2 0 2mx2 kx1 2kx2 0
5.1 两自由度系统的模态
m
0
0 2m
xx12
2k k
k
2k
xx12
5.1 两自由度系统的模态
主振动 x(t) u cos(t )
代入运动微分方程 Mx Kx 0
化简可得代数齐次方程组 (K 2M )u 0
k1+k2
-k2
2
m1
-k2
k2+k3
2m2
uu12
0 0
上式存在非零解的充要条件:系数行列式为零,即:
K 2M 0
k1+k2 2m1
两自由度系统的振动
多自由度系统的特点:
各个自由度彼此相互联系,某一自由度的振动往 往导致整个系统的振动。
运动微分方程的变量之间通常相互耦合,需要求 解联立方程。
返回首页
两自由度系统的振动
多自由度系统是指具有两个以上自由度以上的动力学系 统,二自由度系统是最简单的多自由度系统。
汽车左右对称,化为平面系统
5.1 两自由度系统的模态
再将初始条件(2)代入式,得
A(1) 1
0,
1 0,
A(2) 1
1,
2 0
x1(t) cos2t cos 3
kt m
(cm)
x2 (t) cos2t cos 3
k t (cm)
m
这表明,由于初始位移之比等于该系统的第二振幅比,因 此,系统按第二主振型以频率ω2作谐振动。
振动振动测试基础知识
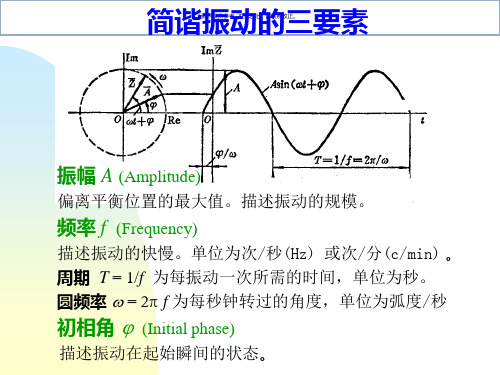
初相角 (Initial phase)
描述振动在起始瞬间的状态。
振动位移、速度、加速度之间的关系 资料仅供参考,不当之处,请联系改正。
x
v
vx
a
振动位移
a
位移、速度、加速度都是同
xAs i nt
频率的简谐波。
速度)
vdxAsin t()
dt
2
加速度
三者的幅值相应为A、A、 A 2。
相位关系:加速度领先速度
均值 (Mean value)
又称平均值或直流分量。
x 1
T
x dt
T0
有效值
xrms
1 T x2 dt T0
资料仅供参考,不当之处,请联系改正。
简谐振动的幅值参数
平均绝对值
正峰值
有效值
峰峰值
平均值
负峰值
各幅值参数是常数,彼此间有确定关系
峰值 xp=A; 峰峰值 xp-p=2A
平均绝对值 xav=0.637A
资料仅供参考,不当之处,请联系改正。
旋转机械的振动图示 (变转速)
轴心轨迹阵 波德图与极坐标图 (Bode & Polar Plot)
升(降)速时,基频幅值和相位的变化
三维频谱图 (Cascade) 坎贝尔图 (Campber)
各转速下的频谱图的另一种表示
轴心位置
判定轴颈静态工作点和油膜厚度
资料仅供参考,不当之处,请联系改正。
资料仅供参考,不当之处,请联系改正。
振动相位与转子转角的关系
振动信号
参考脉冲
从参考脉冲到第一个正峰值的转角 定义振动相位。
振动相位与转子的转动角度一一对应。在平衡和故障 诊断中有重要作用。
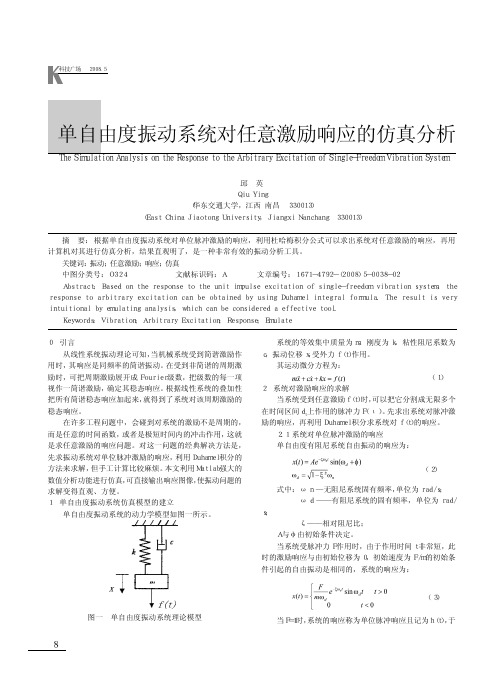
单自由度振动系统对任意激励响应的仿真分析
(4) 则系统对 t=0 时作用的脉冲力的响应可表示为 x(t)=Fh(t) 如果单位脉冲在 t= τ时刻施加,则 (5)
用, 可以把它分割成无限多个在时间区间 d τ上作用的脉冲 力 F(τ)。根据式(5) ,对在 t= τ作用的单个冲量 F=F(τ) d τ,系统的响应为: dx=F(τ)dth(t- τ) (7)
单 自 由 度 振 动 系 统 对 任 意 激 励 响 应 的 仿 真 分 析
图三 4 图二 任意激励时间函数 f(t) 对于线性系统, 在时间t,系统的响应就是在这一时间内 所有单个冲量 F(τ)d τ的总和,即: (8) 结束语
系统对任意激励 f(t)的响应
对于不同的系统或不同的激励力, 只要直接在程序中改 变系统参数以及激励力的时间函数表达式, 就可以迅速得出 系统的响应,而不需要进行烦琐的计算。 由图三可以看出, 利用Matlab对振动系统对任意激励的 响应进行仿真, 简单直观, 是理论研究及工程实践工作中有 力的工具。 参考文献
Abstract: Based on the response to the unit impulse excitation of single-freedom vibration system, the response to arbitrary excitation can be obtained by using Duhamel integral formula. The result is very intuitional by emulating analysis, which can be considered a effective tool. Keywords: Vibration; Arbitrary Excitation; Response; Emulate 0 引言 从线性系统振动理论可知, 当机械系统受到简谐激励作 系统的等效集中质量为 m, 刚度为 k,粘性阻尼系数为 c,振动位移 x,受外力 f(t)作用。 其运动微分方程为: (1) 2 系统对激励响应的求解 当系统受到任意激励f(t)时, 可以把它分割成无限多个
第9课_多自由度系统的振动响应 ppt课件

Physical Coordinates = CHAOS
Modal Space = Simplicity
Rotor
Bearing
Bearing
Foundation
21
1 1
q1
021
22
2
1
q2
022
23
3
1
q3
023
方程(1)与方程(2)计算量差多少?
1 2 3 4 x1 1
2 3 4
(2)
振型叠加法主要计算过程
1. 特征值分析:求解系统的固有频率和模态振型 2. 坐标变换:将运动方程转换到模态空间 3. Duhamel积分:求解一系列单自由度系统振动方程 4. 振型叠加:得到系统的物理响应
Solution of a SDOF system
空间中的运动方程是解耦的。
线性叠加原理
阻尼矩阵呢?
• 模态空间中系统总响应等于各单自由度响应之和,从而 可以独立求解各振型方程,再叠加得到系统的响应。
With regard to
振型叠加法的计算量
几乎所有的工程结构的振动响应中低阶模态振动占主导地 位,高阶振动影响极小,因此只采用低几阶模态进行振型 叠加计算可以获得足够的精度(模态截断),这一思想在 大量工程实践得到充分证明。
0
(3)
可表示为 Gx Hx Ef (t)
(4)
式中
C G M
M
0
,
H
K
0
0 M
,
E
I 0
,
x
q q
机械振动5多自由度系统10-11有阻尼
c c c C P u T Cu c c c c c c
非对角矩阵
5
若 C P非对角,则前面在无阻尼系统中介绍的主坐标方法或 正则坐标方法都不再适用,振动分析将变得十分复杂。
为了能沿用无阻尼系统中的分析方法,工程中常采用下列 近似处理方法 。
有: uT Muη uT Cuη uT Kuη uT F (t )
即:
C pη Λη N (t ) η
其中:
C p uT Cu
模态阻尼矩阵
虽然模态质量矩阵与模态刚度矩阵是对角阵,但模态阻尼矩 阵一般非对角阵,因而正则坐标η 下的强迫振动方程仍然存 在耦合。 2016年1月11日
《振动力学》
i2
H i ( ) ei (t i ) , (i 1 ~ n)
1
10
正弦激励下正则坐标的稳态响应:
N 0i i (t i ) ηi (t ) Im 2 H i ( ) e i N 0i sin(t i ) i2 (1 i2 ) 2 (2 i i ) 2
c
c
c
1 2 1 q 1 2 1 q1 F1 1 0 q m c k sin t 2 1 2 q 2 1 2 q2 F2 0 1 q
i 2 ii η i i2ηi N0i eit , (i 1 ~ n) η
式中, N 0i u ( i ) F0
T
(i 1,2,, n)
则正则坐标的稳态响应:
ηi (t )
式中, H i ( )
N 0i
, arctan2 i i , , i i (1 i2 ) 2 (2 i i ) 2 1 i2 i 频率比 相位角 正则坐标的放大因子 2016 年1月11日
第2章——多自由度系统的振动——强迫振动
船体振动基础1第2章多自由度系统的振动第章多自由度系统的振一、引言二、两自由度系统的振动2正则振型上节课内容的回顾⎪⎫⎪⎧)(1i Φ⎪⎫⎪⎧)()(1)(i n i ΦΦ⎪⎪⎪⎬⎪⎪⎪⎨=Φ)(2)(i i ΦM 取1)(=i n Φ⎪⎪⎪⎬⎪)()(2)(i n i ΦΦM上节课内容的回顾1=pi iM c 2=1=书上例题P49:例2.9¾振动方程组解耦F1F2k1k2m1m k3两自由度弹簧-质量(1) 21211F kx kx xm =−+&&(2) 22212F kx kx xm =+−&&(2)-(1):121212)(3)(F F x x k x x m −=−+−&&&&(2)+(1):&&&&121212)()(F F x x k x x m +=+++121x x y −=F F Q −=122x x y +=引入坐标变换:定义广义力:122121F F Q +=m +&&1113Q ky y =222Q ky y m =+&&质量矩阵和刚度矩阵同时为对角矩阵:[]⎥⎦⎤⎢⎣⎡=m m M 00[]⎥⎦⎤⎢⎣⎡=k k K 003质量矩阵和刚度矩阵的形式与坐标选取有关上节课内容的回顾¾通过选取坐标系直接使质量矩阵和刚度矩阵同时为对角矩阵难以实现。
¾通过坐标变换使振动微分方程组质量矩阵和刚度矩阵同时对角化(解耦)——振动模态分析的基本思路。
•系统的振动表示为所有n个主振动的叠加¾对多自由度系统振动求响应求解的类型:无阻尼振动系统对初始条件的响应无阻尼振动系统对任意激励的响应有阻尼振动系统对各种激励的响应(简谐激励、周期激励、任意激励)阻尼的表达与处理:一、什么情况下需要讨论阻尼的影响?1、系统的阻尼很小,而且激励频率又远离共振频率,阻尼效应影响很小,可以忽略不计。
第2章——多自由度系统的振动——固有振型
−μk (1+ μ)k
⎤ ⎥ ⎦
⎧⎩⎨uu12
⎫ ⎬ ⎭
=
⎧0⎫ ⎩⎨0⎭⎬
k1 m1
k2
k3
m2
Mu&& + Ku = 0
(K −ω2M)ϕ = 0
有非零ϕ
ϕ1
=
⎡1⎤ ⎢⎣1⎥⎦
,
ϕ2
=
⎡−1⎤
⎢ ⎣
1
⎥ ⎦
det(K −ω2M) = 0
ω1 =
k, m
ω2 =
(1+ 2μ)k
m
u1
u2
k1
k2
⎢⎣ 3 ⎥⎦
⎡1⎤
ϕr* = ⎢⎢−1/2⎥⎥
⎢⎣ 3/2 ⎥⎦
理解固有振型
② 按自由度中最大幅值归一化:
⎡2⎤
ϕr = ⎢⎢−1⎥⎥
⎢⎣ 3 ⎥⎦
⎡ 0.66 ⎤
ϕr* = ⎢⎢−0.33⎥⎥
⎢⎣ 1 ⎥⎦
特点:一眼可以看出某阶固有振动振动最大的部位
③ 按模态质量归一化
ϕr
ϕ
* r
=
ϕr
=
ϕ
T r
船体振动基础
1
第2章 多自由度系统的振动
一、引言 二、两自由度系统的振动
2
第三章:多自由度系统的振动分析
第6周 (2):
1.理解固有振型
2.固有振型的正交性
3. 多自由度系统的自由振动 (P45) ¾ 多自由度系统的固有频率和振型
1、多自由度系统无阻尼自由振动方程式的一般形式: Mq&& + Kq = 0
M
21
A( i ) 1
+
南京航空航天大学《机械振动》期末考试题
甲 ·A · O
乙
第7题
第8题
8.如上图所示, 光滑槽的半径 R 远大于小球的运动弧长。 今有两个小球(视为质点)同时由静 止释放,其中甲球开始时离圆槽最低点 O 远些,则它们第一次相遇的地点在( ) A.O 点 B.O 点的左侧 C. O 点的右侧 D.无法确定,因为小球质量关系未定 9.如上图所示,摆球质量为 m,半径为 r,带正电荷,用长为 L 的细线把摆球吊在悬点 O 做 成单摆,悬点 O 处固定着另一个正电荷,则这个单摆的振动周期为( ) A. 2
18.有人利用安装在气球载人舱内的单摆来确定气球的高度。已知该单摆在海平面处的周期 为 T0,当气球停在某一高度时,测得该单摆的周期为 T,求该气球此时离海平面的高度 h,把 地球看作质量均匀分布的半径为 R 的球体。
L g
B. 2
Lr gC.大于 2Lr gD.小于 2Lr g
10.如上图所示,AC 是一段半径为 2m 的光滑圆弧轨道, 圆弧与水平面相切于 A 点, BC=7cm。 现将一个小球先后从曲面的顶端 C 和圆弧中点 D 由静止开始释放,到达底端时的速度分别 ) 为 v1 和 v2,所用时间分别为 t1 和 t2,则( B. v1<v2,t1=t2 C. v1>v2,t1>t2 D. v1=v2,t1=t2 A. v1>v2,t1=t2 二.填空题(5’×4=20’ ) 11.两个简谐运动分别为 x1=8sin(4πt+
如图所示在光滑水平面上有一弹簧振子其左端固定在墙上其右端系一个质量为m的物体a用外力压缩弹簧使物体a从平衡位置o向左移动一小段距离外力共做功w紧靠a放一个质量是m的物体b使a和b均处于静止状态然后撤去外力由于弹簧作用物体开始向右滑动
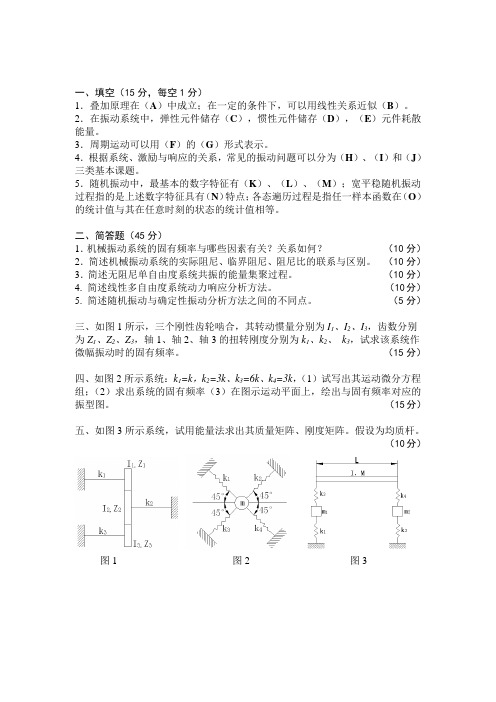
一、填空(15 分,每空 1 分) 1.叠加原理在(A)中成立;在一定的条件下,可以用线性关系近似(B)。 2.在振动系统中,弹性元件储存(C),惯性元件储存(D),(E)元件耗散 能量。 3.周期运动可以用(F)的(G)形式表示。 4.根据系统、激励与响应的关系,常见的振动问题可以分为(H)、 (I)和(J) 三类基本课题。 5.随机振动中,最基本的数字特征有(K)、(L)、(M);宽平稳随机振动 过程指的是上述数字特征具有 (N) 特点; 各态遍历过程是指任一样本函数在 (O) 的统计值与其在任意时刻的状态的统计值相等。 二、简答题(45 分) 1. 机械振动系统的固有频率与哪些因素有关?关系如何? 2.简述机械振动系统的实际阻尼、临界阻尼、阻尼比的联系与区别。 3. 简述无阻尼单自由度系统共振的能量集聚过程。 4. 简述线性多自由度系统动力响应分析方法。 5. 简述随机振动与确定性振动分析方法之间的不同点。
机械振动

数学上,单位脉冲必须具有零脉冲宽度、单 位面积和无限的高度。这样的脉冲模型不可能在 现实应用中实现。
在具体系统的脉冲试验中,若激励的持续时 间同系统的固有周期(T=1/f )相比时非常的短,则 激励就可以考虑为一个脉冲。
具有上述特性的任何函数(并不一定是矩形 脉冲),都可用来作为一个脉冲,而且称为函数。
dx e
n
F ( )d sin d md
1 x(t ) md
t 0
F ( )e n (t ) sin d t d
对任何初始条件的响应 6、需要数学上的支持,引 入 函数 对零初始条件的脉冲响应
x n x0 x(t ) e nt x0 cosd t 0 sin d t d 1 t F ( )e n (t ) sin d (t )d md 0
0 0 0
因为
0 0
ˆ F (t )dt
0 0 0
0
ˆ F (t )dtdt
(3.8-6)
ˆ ˆ F (t )dt F
ˆ (t )dt F 常量 (3.8-7)
则方程(3.8-6)中的左端第二项、第三项、右端项的积分值均为无限小量,可以 略去不计。解释 0 0 0
例3.8-1 设一单自由度无阻尼系统受到的简 谐激励如下: F0 sin t (t 0) F (t ) (t 0) 0 试用卷积积分计算其响应。 解:在方程(3.8-16)中,令ζ=0,d=n,则 1 t x(t ) 0 F ( ) sin n (t )d m n F0 t 0 sin sin n (t )d m n F0 1 sin t sin nt 2 k 1 n n
第4章:多自由度系统的振动

频率方程:
4 2 a b c 0
第4章 多自由度系统的振动
( 4 . 1 . 10 )
2 2 a m m m , c k k k k m k m 2 k m , 1122 12 b 11 22 12 11 22 22 11 12 12
特征根—固有频率:
( b b 4 ac 4 . 1 . 11 )
2 1 a 1 , 2 2 2
1—第一阶固有频率: 代入齐次方程组 (4.1.9),得
2 2 A k m k m 21 11 111 21 1 21 1 2 2 A k m k m 11 12 112 22 1 22
k1x1
c 1 x 1
m 1 x1
k2 (x2 x1)
F1(t)
2 x 1) c 2(x
k
1
x1 (t )
k
c
x 2 (t)
k
c
m
3
1
m
c1
1
m
2
2
3
x2 k2 (x2 x1) m 2
2 x 1) c 2(x
k3 x2
F 2 (t)
(a)
m
2
图4.1.1 两个自由度系统的受迫振动
x ( t ) φ q ( t )
( 4 . 1 . 16 )
—模态矩阵或振型矩阵, q(t)—广义位移矢量 。
第4章 多自由度系统的振动
四个待定常数: 四个初始条件:
A1 1 A12
机械振动题目

一、填空题1. 确定系统在随机激励下的振动响应为 响应;在实际解决振动问题的过程中,在激励与响应均为已知的情形下确定系统的特性一般称为 。
2. 简谐激励作用下,有阻尼的单自由度系统的响应包括 振动和 振动两部分。
3. 单自由度无阻尼振动系统的固有频率为: ,周期为: ,它们只与 ,与 均无关。
4. 一般来说,两自由度系统有两个 及 ,在任意初始条件下的自由振动一般由 ,只有在特殊的初始条件下系统才按 作固有振动。
5. 机械振动是指: 往复运动。
是常见的振动现象。
6. 单自由度系统的振动,按照系统阻尼比的不同,一般按三种情况来讨论系统的响应,即 、 、 。
7. 简谐振动的位移为sin()n x A t ωϕ=+,则,x x&&&也是 ,具有与位移相同的固有频率。
速度和加速度的幅值分别为: ,相位与位移相位的关系为: 。
8. 振幅有规律地 的现象称为拍。
拍是一种比较普遍的现象,凡是由两个 的简谐振动合成的振动,都可能产生拍。
9. 两自由度系统强迫简谐振动的频率与 相同。
除系统参数外及激励的振幅之外,响应振幅还和 有密切关系。
当激励频率接近于系统的任一固有频率时,就会发生 。
10. 振动微分方程通过刚度项来耦合,称为 ;振动微分方程通过质量项来耦合,称为 。
如果恰当的选取坐标,可使两个微分方程解除耦合,这种坐标称为 。
11. 随机系统在确定激励下的振动响应为 响应;确定系统在随机激励下的响应为 响应。
12. 在振动问题中,在激励条件与系特性已知的情形下求系统的响应,称为 。
13. 两自由度无阻尼系统有两个固有频率及固有振型,如果给定的初始条件满足第一阶固有振型,则系统响应中含有的频率成分为 ,如果给定的初始条件满足第二阶固有振型,则系统响应中含有的频率成分为 ,对于任意的初始条件,系统响应中含有的频率成分为 。
14. 调整固有振型的元素使其成为单值的过程称为 ,而所得到的向量称为 。
机械振动-第五章多自由度系统的振动
5-2 多自由度系统振动方程式
1)质量弹簧系统
根据牛顿运动定律,列出各质点的运动方程式
1 P m1 x 1 K1 x1 K 2 x2 x1 2 P2 K 2 x2 x1 K 3 x3 x2 m2 x 3 P3 K 3 x3 x2 m3 x
列向量
系数矩阵
x1 x x 2 , x 3
1 x 2 , x x x 3
P 1 P P 2 P 3
m1 0 M 0 m2 0 0
矩阵形式表达式
K A p 2 M A 0
其中
A1 A2 A An
有非零解的条件是系数行列式等于零
k11 m11 p 2 k 21 m21 p 2 k n1 mn1 p 2
k12 m12 p 2 k1n m1n p 2 k 22 m22 p 2 k 2 n m2 n p 2 k n 2 mn 2 p 2 k nn mnn p 2
或
K x 0 M x
列向量
0 0 0 0
2)梁上具有集中质量的横向振动系统
梁上具有任意n个集中质量,系统运动时各质量的横向位移 为y1、y2、…yn,作用在各质量上的外力为P1、P2…Pn,惯性 1 , m2 2 , mn n ,由柔度影响系数的定义及力 y y y 力为 m1 的叠加原理,可列出下述关系式
当外力不存在时,得到系统自由振动方程式
y M y
或
0 y M y K y 0 M y
当系统存在阻尼时,如果是粘性阻尼,引入一个n阶正定 的阻尼方阵,使具有阻尼的多自由度系统的振动方程式具有 下述一般形式。
多自由度系统的振动、响应和求解
D k vD
B Q2
A Q1
k vA
位移图
受力图
图(b) v21, v1v30时板的位移和受力图
(2)求刚度矩阵第二列 参见图 b,可得板的力平衡方程:
Q3 kvA kvD 0 Q1L (kvA kvD) L 0 Q1 Q2 kvE 0
;其中
k
12EI L3
解得 Q 1 2 k , Q 2 3 k , Q 3 0
微振动时, i ,
&
i
为小量,将以上能量保留到二阶小量,得
(注意:为了得到线性振动方程,能量表达式必须保留 到二阶微量)
T 12ml2[3&12 2&22 &32 4&1&2 2&2&3 2&3&1]
3
12ml2{&1,&2,&3}2
1
2 2 1
11&&12 1&3
V
1 2
mgl
(312
222
简支梁在横向集中力作用下的挠度公式为
P
f Pb(xl2x2b2), 0xa 6EIl
x
a
b
l
f Pb[l(xa)3(l2b2)xx3], axl
6EIlb
例4.1 写出图示梁的柔度矩阵,梁的抗弯刚度为EI。如果 将梁的质量按分段区间均分到区间的两个端点,写出梁的质
量矩阵,设梁单位长度的质量为 l。
;其中
k
12EI L3
Q1 Q2
2 2
(kvA
kvD
)
0
解得 Q 1 4 k , Q 2 2 k , Q 3 0
因此,刚度矩阵第一列为
《机械振动》张义民—第5章第9、10、11节ppt
例5.9-1 考虑图5.9-1所示系统,在系统上作用 有激励向量F(t)=[0 F0u(t)]T,u(t)为单位阶跃函数。 求在零初始条件下系统的响应。
解:系统的运动微分方程
1 m 0
0 2
q1 q2
k
2 1
1 q1
2
q2
0
F0u
t
为了用振型分析方法求解,
首先要解特征值问题,得
N t uTF t
F0 m
0.627963 0.325057
u
t
将上式代入方程(5.9-14),得
1t
0.627963
F0 1
m 1
t 0
u
sin
1
t
d
0.62796312F0 m 1 cos1t
2t 0.325057
F0 1
m 2
t 0
u
sin
2
t
d
0.325057
F0
22
m
F0 1
m 2
t 0
sin
sin
1
t
d
0.325057
F0
22
m
sin
t
2
sin
2t
1
1
2
22
最后,得
q1t
F0 m
0.455295112
sin
t
1
sin
1t
1
1
2
12
0.122009
1
22
sin
t
2
sin
2t
1
1
2
22
q2t
F0 m
0.621945
机械振动5多自由度系统10-11有阻尼.

i 2 i n) η
式中, N 0i u ( i ) F0
T
(i 1,2,, n)
则正则坐标的稳态响应:
ηi (t )
式中, H i ( )
N 0i
, arctan2 i i , , i i (1 i2 ) 2 (2 i i ) 2 1 i2 i 频率比 相位角 正则坐标的放大因子 2018 年12月2日
《振动力学》
4
例如:三自由度系统
2k
m
x1
k
x2 m
k
x3 m
2k
c
m 0 0 M 0 m 0 0 0 m
3k K k 0
k 2k k
0 k 3k
c 0 0 C 0 0 0 0 0 0
一般情况下,可将各种类型的阻尼化作等效粘性阻尼。
2018年12月2日 《振动力学》
2
有阻尼的 n 自由度系统的强迫振动方程为:
Cq Kq F (t ) Mq
阻尼矩阵 元素 cij 阻尼影响系数
q Rn
物理意义:是使系统仅在第 j 个广义坐标上产生单位速度而 相应于第 i 个坐标上所需施加的力 阻尼力为广义速度的线性函数 表示为:
6 k u T Ku 0 0 0 6k 0 0 12k 0
1 1 1 u 2 0 1 1 1 1
0 6 m 0 uT Mu 0 2 m 0 0 3m 0
2018年12月2日 《振动力学》
5.10 多自由度系统的阻尼
2018年12月2日 《振动力学》
1
任何实际的机械系统都不可避免的存在着阻尼因素 材料的结构阻尼,介质的粘性阻尼等 由于各种阻尼力机理复杂,难以给出恰当的数学表达。 在阻尼力较小时,或激励远离系统的固有频率时,可以忽略 阻尼力的存在,近似地当作无阻尼系统。 当激励的频率接近系统的固有频率,激励时间又不是很短暂 的情况下,阻尼的影响是不能忽略的。
《多自由度系统振动》PPT课件教案资料
2022/2/12 《振动力学》
代入,得: (FM I)φ 0 特征方程: FMI 0 18
多自由度系统振动 / 多自由度系统的自由振动/模态
• 多自由度系统的模态(主振型)
正定系统: M X KX 0
主振动: X φ asi nt ()
XRn M、 KRnn
0 φRn
特征值问题: (K2M)φ0
7
《振动力学》
多自由度系统振动 / 多自由度系统的自由振动
• 多自由度系统的固有频率
作用力方程: MXKXP(t) XRn
自由振动方程: MXKX0
和单自由度系统一样,自 由振动时系统将以固有频 率为振动频率。
在考虑系统的固有振动时,最感兴趣的是系统的同 步振动,即系统在各个坐标上除了运动幅值不相同外, 随时间变化的规律都相同的运动 。
则有:(TTAT)T=TTAT(TT)T=TTAT 正定性质:若原来的刚度矩阵K 正定,则(TTKT)仍正定。
因此坐标变换X =TY 不改变系统的正定性质。 对于质量矩阵也如此。
2022/2/12
5
《振动力学》
回顾:单自由度系统自由振动-无阻尼自由振动
小结:
单自由度系统自由振动分析的一般过程:
1、由工程装置建立自由振动的一般方程,并写出振动的标准方程; 2、根据标准方程,建立本征方程并计算得到本征值; 3、根据本征值,写出标准方程的通解; 4、根据初始条件,计算标准方程的特解。
f(t)asint(), 0
f(t)a tb,
0
主振动
(1)正定系统 0
只可能出现形如 X φ asi nt ()的同步运动。
系统在各个坐标上都是按相同频率及初相位作简谐振动。
(2)半正定系统 0
2014天津大学博士考试大纲机械学院

科目代码:2201科目名称:线性振动笔试部分一、考试的总体要求掌握单自由度系统、多自由度系统和简单弹性体的自由振动和受迫振动理论,重点掌握有关的基本概念和分析、计算方法。
能用数值计算方法计算系统的固有频率和振型,并能运用线性振动知识分析解决简单的工程实际问题。
二、考试的内容及比例1.基本部分:(占试题80%)1)运用单自由度系统振动理论,分析求解自由振动、谐波激励响应。
2)求解单自由度系统对任意激励的响应。
3)建立多自由度系统的自由振动方程,求固有频率、主振型及系统对初始条件的响应。
4)多自由度系统的受迫振动分析,系统对任意激励的响应。
5)多自由度系统的数值计算方法,包括基频估算的基本方法,如瑞利能量法、邓克莱法,李兹法;迭代方法,如矩阵迭代法,子空间迭代法。
2.提高部分:(占试题20%)1)弹性体的一维振动问题,如:简单边界条件下杆的纵向振动频率方程,主阵型,正则阵型,受迫振动的求解;简单边界条件下梁的横向振动固有频率,主阵型等。
主阵型的正交性。
2)振动控制问题。
振动控制的基本类型,力传递率,无阻尼线性减振器的工作原理,减振器参数的设计。
三、试卷题型及比例计算分析题为主,论述题不超过总分的20%四、考试形式及时间笔试,三个小时。
五、主要参考书目1.《工程振动理论与测试技术》刘习军等主编,高等教育出版社2.《机械振动》,贾启芬等译,北京科学出版社3. 《机械振动》上册,清华大学固体力学组编,机械工业出版社科目代码:2202科目名称:弹性力学笔试部分一、考试的总体要求掌握弹性力学的基本理论与分析方法。
主要内容包括应变分析,应力分析,本构关系,弹性理论的微分提法及一般原理,弹性力学平面问题与柱形杆扭转问题,能量原理等。
要求能运用弹性力学知识分析解决简单的工程实际问题。
二、考试的内容及比例1.基本部分:(占试题80%)1)应力概念,应力状态分析方法,平衡微分方程。
2)应变概念,刚体转动,应变状态及应变协调方程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
对激励进行线性变换:
F0 0.627963 N (t ) u F (t ) 0.325057 sin t , m
T
代入方程(5.9-14):
F0 t 1 1 (t ) ( 0.627963 ) sin sin 1 (t )d 0 1 m t cos[ F0 1 (t )] cos[ 1 (t )] 0.627963 d 0 2 1 m F0 0.627963 2 (sin t sin 1t ) 2 1 (1 ) m
9
n
例5.9-2: 系统受激励:
q1 k m k 2m k
q2
F (t ) 0 F0 sin t ,
T
求零初值下系统响应。 解:系统的运动方程:
F0 sin t
1 2 1 q1 0 1 0 q m k F sin t q q 0 2 1 2 2 2 0
(i ) q2 (t ) u2 i (t ) 0.394338 2 F0 2 (sin t sin 1t ) (1 )m 1 i 1 n
F 0.105662 2 0 2 (sin t sin 2t ) (2 )m 2
k k 其中, 1 0.796226 , 2 1.538188 . m m
(i )T
Mq 0, (i 1,2, , n)
其中i 0和 i 0是各正则坐标的初始位 移和初始速度。
对初始条件的响应 : i 0 i (t ) i 0 cosi (t ) sin i (t ) (i 1,2, n) ( 5.9 12 )
i
4
对任意激励 Ni (t ),特解可以由卷积积分 给出:
8
q1 (t ) u1(i )i (t ) 0.459701 1 0.627963 F0 ( 1 cos1t ) 2 i 1 m 1 m F0 1 0.888074 (0.325057 ) 2 ( 1 cos2t ) m 2 m F0 [0.455295 ( 1 cos 1t ) 0.122009 ( 1 cos 2t )] k n F 1 (i ) q2 (t ) u2 i (t ) 0.627963 0.627963 2 0 ( 1 cos1t ) m 1 m i 1 F 1 0.325057 (0.325057 ) 20 ( 1 cos2t ) m 2 m F0 [0.622007 ( 1 cos 1t ) 0.044658 ( 1 cos 2t )] k k k 其中, 1 0.796226 , 2 1.538188 . m m
1.0 u , 1.366025
(1)
u
( 2)
, 0.366025
6
求得正则振型矩阵:
1 0.459701 0.888074 u 0.627963 0.325057 , m
对激励进行线性变换:
F0 0.627963 N (t ) u F (t ) 0.325057 u(t ), m
(t ) uT Kuη(t ) uT F (t ) uT Muη
(t ) Λη(t ) N (t ) η
( 5.9 7 )
T 式中Λ为对角线上元素为 i2的对角矩阵, N (t ) u F (t )
为与广义坐标向量 (t )相应的 n维广义力向量,即正则 激励。 方程( 5.9 7 )就是 n个解耦的单自由度运动 方程:
i (t )
1
i
N ( ) sin (t )d
0 i i
t
(i 1,2, n)
( 5.9 13 )
因此第 i个正则坐标的全解 i (t ): i 0 1 t i (t ) i 0 cosi t sin i t Ni ( ) sin i (t )d ( 5.9 14 ) 0 i i
F0 0.627963 N (t ) u F (t ) 0.325057 u(t ), m
T
代入方程(5.9-14): F0 t 1 2 (t ) ( 0.325057 ) u( ) sin 2 (t )d 2 m 0
0.325057 F0 F0
已求得系统的固有频率和模态:
k k 1 0.796226 , 2 1.538188 . m m
1.0 u , 1.366025
(1)
u
( 2)
1.0 , 0.366025
10
求得正则振型矩阵:
1 0.459701 0.888074 u 0.627963 0.325057 , m
2 i i
解耦
q(t ) uη(t )
14
作业
5.13.
15
以上方程的通解为对应 齐次方程的通解 非齐次方程的特解。
齐次方程的解就是对初 始条件的响应(5.5节),
0 . 设原坐标的初始条件为 :q0 , q
所以正则坐标的初始条 件为:
0 uT Mq 0 η0 uT Mq0, η
ηi 0 u
(i )T
( 5.9 11 )
Mq 0, η i 0 u
所以原坐标下的响应 q(t ):
q(t ) uη(t ) u(i )i (t )
i 1 n
( 5.9 15 )
是正则坐标的响应 η(t )的叠加。
5
例5.9-1: 系统受激励:
q1 k m k
q2
F (t ) 0 F0u(t ) ,u(t )为单位阶
T
跃函数,求零初值下系统响应。
上述响应包括稳态响应 和瞬态响应。 存在阻尼时瞬态响应将 很快 衰减, 若只考虑强迫振动的稳 态响应,则只取 sin t项。
13
模态叠加法小结:
η(t ) uT Mq(t ) N (t ) uT F (t )
耦合
物理空间
Kq F (t ) Mq
正则坐标空间
i Ni (t )
2m F u(t ) 0
解:系统的运动方程:
k
1 2 1 q1 0 1 0 q m k F u ( t ) q q 0 2 1 2 2 2 0
已求得系统的固有频率和模态:
k k 1 0.796226 , 2 1.538188 . m m
11
代入方程(5.9-14): F0 t 1 2 (t ) ( 0.325057 ) sin t sin 2 (t )d 0 2 m t cos[ F0 2 (t )] cos[ 2 (t )] 0.325057 d 0 2 2 m
F0 0.627963 N (t ) u F (t ) 0.325057 sin t , m
T
0.325057 2 (sin t sin 2t ) 2 2 (2 ) m
F0
再由 q(t ) uη(t ) u(i )i (t ) 求得原坐标下的响应。
T
代入方程(5.9-14):
F0 t 1 1 (t ) ( 0.627963 ) u ( ) sin 1 (t )d 0 1 m F 0.627963 2 0 cos1 (t ) t0 1 m
0.627963
F0
2 1
( 1 cos1t ) m
7
i (t ) i2ηi (t ) Ni (t ) (i 1,2,, n) η
( 5.9 8 )
3
(t ) Λη(t ) N (t ) η
( 5.9 7 ) ( 5.9 8 )
i (t ) i2ηi (t ) Ni (t ) (i 1,2,, n) η
i 1 n
或: q j (t ) u (ji )i (t )
i 1
n
( j 1,2)
12
F0 q1 (t ) u (t ) 0.288675 2 (sin t sin 1t ) 2 (1 )m 1 i 1
n (i ) 1 i
F 0.288675 2 0 2 (sin t sin 2t ) (2 )m 2
2 2 2 2 m
cos2 (t ) t0
0.325057
n
( 1 cos2t ) m
再由 q(t ) uη(t ) u(i )i (t ) 求得原坐标下的响应。
i 1
或: q j (t ) u (ji )i (t )
i 1
n
( j 1,2)
机械振动第五章
1
5.9 无阻尼系统对任意激励的响应· 振型叠加法
系统振动方程
(t ) Kq(t ) F (t ) Mq
( 5.9 1 )
其中q(t )为广义坐标 qi (t )(i 1,2,, n)组成的向量。
这是一组 n个常微分方程,
一般来说,上式是耦合 方程,包括弹性耦合和 惯性耦合,
要求特解不是容易的, 通过坐标变换,消除耦 合, 则方程组无耦合项,成 n个单自由度方程。
2
同样利用振型向量的正交性,进行坐标变换,将 得到解耦的方程组。
假设系统的固有正则振 型矩阵为 u,
用正则振型矩阵进行坐 标变换 q(t ) uη(t ),代入方程 (5.9 1), 并用uT 左乘方程两边,得: