Canny多级边缘检测算法的C语言实现
canny边缘检测matlab代码
canny边缘检测matlab代码Canny边缘检测是一种常用的图像处理算法,它可以有效地检测图像中的边缘,并将其显示为白色线条。
在Matlab中,可以使用以下代码实现Canny边缘检测:1. 读取图像首先,需要读取待处理的图像。
可以使用imread函数来读取图片:```matlabimg = imread('image.jpg');```其中,image.jpg是待处理的图片文件名。
2. 灰度化Canny算法只能处理灰度图像,因此需要将彩色图像转换为灰度图像。
可以使用rgb2gray函数来实现:```matlabgray_img = rgb2gray(img);```3. 高斯滤波在进行边缘检测之前,需要对图像进行高斯滤波来消除噪声。
可以使用fspecial和imfilter函数来实现:```matlabgaussian_filter = fspecial('gaussian', [5 5], 1);blur_img = imfilter(gray_img, gaussian_filter, 'replicate');```其中,[5 5]表示高斯核的大小为5x5,1表示标准差。
4. 计算梯度幅值和方向接下来,需要计算每个像素点的梯度幅值和方向。
可以使用Sobel算子来计算梯度,并利用arctan函数计算方向角度:```matlabsobel_x = [-1 0 1; -2 0 2; -1 0 1];sobel_y = [-1 -2 -1; 0 0 0; 1 2 1];grad_x = imfilter(blur_img, sobel_x, 'replicate');grad_y = imfilter(blur_img, sobel_y, 'replicate');grad_mag = sqrt(grad_x.^2 + grad_y.^2);grad_dir = atan(grad_y ./ grad_x);```5. 非极大值抑制由于Sobel算子计算出的梯度幅值可能会有多个峰值,因此需要进行非极大值抑制来保留边缘。
一种改进的Canny边缘检测方法
一种改进的Canny边缘检测方法邱春婷;刘红彦;齐静【摘要】传统Canny边缘算子通过像素点的梯度幅值是否大于梯度方向两侧的像素的梯度幅度值来判定边缘。
针对传统Canny边缘算子的判断边缘的方法,分析Canny边缘算子在边缘检测时容易出现边缘点的漏检而造成边缘不连接现象,结合Harris检测算法改进Canny边缘算子来连接断开的边缘并提高检测准确率。
实验结果表明,改进的算法检测边缘连接性好并具有更好的检测准确度。
%In the classical Canny edge detector ,a pixel is labeled as an edge if its gradient magnitude is lar-ger than those of pixels at both sides in the gradient direction .T he defining edges in this manner causing some obvious missing edges are analyzed .Combined with Harris algorithm ,an improved Canny scheme is then proposed to detect the connected edges and improve the detection accuracy .The experiments show that the edges detected by the improved algorithm are more successive and the detecting results are more accurate .【期刊名称】《纺织高校基础科学学报》【年(卷),期】2014(000)003【总页数】5页(P380-384)【关键词】图像处理;边缘检测;Canny边缘算子;非极大值抑制;边缘连接【作者】邱春婷;刘红彦;齐静【作者单位】西安工程大学服装与艺术设计学院,陕西西安710048;西安工程大学服装与艺术设计学院,陕西西安710048;西安工程大学服装与艺术设计学院,陕西西安710048【正文语种】中文【中图分类】TP391.41图像边缘包含丰富的视觉信息,在基于图像的目标识别和计算机视觉中,边缘检测是至关重要的.边缘是图像灰度变化剧烈的点的集合,边缘检测算法是用来检测边缘像素的局部图像处理方法[1],在过去的几十年里,各种边缘检测方法被提出.根据像素点的灰度变化剧烈程度,可以利用一阶或二阶导数来检测边缘点.传统边缘检测算法主要研究图像的灰度变化信息,典型的利用一阶微分的边缘检测算法有Roberts算子、Prewitt算子和Sobel算子等,利用二阶微分算子的有Laplacian 算子和LOG算子等[2-5],Marr和Hildreth提出利用图像高斯拉普拉斯零交叉检测边缘[6],Haralick通过图像局部灰度值匹配多项式函数并寻找多项式二阶偏导数的零交叉点检测边缘[1].这些微分算子算法通过设定适当的阈值从图像中提取边缘,实现简单方便,具有较好的实时性;但微分算子对图像噪声较敏感,这些算法噪声鲁棒性差,边缘检测精度低[7],因而限制了在实际中的应用.为了提高边缘检测算法性能,1986年Canny提出了基于最优化方法的经典Canny边缘检测算法[8].但同时Canny边缘算子也存在一些不足,其中一个缺点是边缘在交叉点处的不连接性,即交叉点及其邻域处不能检测边缘.针对Canny 边缘算子的不足,一系列的改进算法被提出[9-12].本文结合Harris角点检测算法将交叉点处的断开边缘进行重新连接来改进Canny检测算法.1 Canny算法1986年,Canny在提出经典的Canny边缘检测算法的同时,也提出了评价边缘检测性能的3条准则[8]:(1)信噪比原则,应检测到所有边缘,并且没有伪响应.也就是说检测概率最大化,虚警概率最小化,使得输出图像信噪比尽可能大;(2)定位精度原则,已检测的边缘应与真实边缘尽可能接近,即检测的边缘点距真实边缘中心最近;(3)单边缘响应原则,对于真实边缘点,检测算法应该返回一个点,即应最大程度地抑制虚假边缘响应.1.1 Canny边缘算子基本算法Canny边缘利用泛函求导证明高斯函数一阶导数是以上3条准则的一个最佳的近似.Canny边缘算子[8]算法流程:(1)梯度幅值和梯度方向的计算 Canny边缘算子利用高斯函数对图像进行平滑来计算图像梯度,并获得相应的梯度幅度映射和梯度方向映射.(2)非极大值抑制为了使边缘定位更准确,需要细化边缘,按照梯度幅值和梯度方向保留梯度幅值的局部极大值点,即非极大值抑制.若像素点的梯度幅值大于沿梯度方向的像素两侧的梯度幅值,则判定该像素点为候选边缘点,(3)双阈值处理 Canny边缘算子采用双阈值处理从候选边缘集合中检测得到最终边缘图像.1.2 Canny边缘检测算法分析Canny边缘算子满足边缘检测的3条准则,但在图像边缘交叉点附近可能会造成边缘的断裂现象.这是由图像普通边缘点处灰度变化一致而在交叉点附近图像灰度变化是各向异性的特点[13]所决定的.图1 交叉点处非极大值抑制造成边缘丢失示意图如图1所示,Canny边缘算子对图1(a)作边缘检测得到图1(d)所示最终边缘结果.由图1可以看出,Canny边缘算子在图像边缘交叉点处出现断裂现象.尽管在漏检边缘点处图像灰度梯度幅值大于两侧的像素梯度幅值,但该方向与梯度方向不一致[14].由于交叉点处图像灰度变化是各向异性的[13],如图1(b)所示,灰度变化方向不能用梯度方向来准确表示,此时沿梯度方向作非极大值抑制处理就会将真实边缘点剔除,如图1(c)所示,最终使边缘图像在边缘交叉点附近造成不连接现象.2 改进的Canny算法传统Canny边缘算子检测边缘造成交叉点附近因漏检而造成边缘不连接现象,由图1(d)可以看出,漏检边缘点在交叉点与边缘末端连接部分,因此可以通过寻找交叉点来连接边缘末端部分,找回漏检边缘来改进Canny边缘检测算法. Harris检测算法[15]是经典的寻找图像交叉点的算法,它是对Moravec算子[16]的改进,其基本思想是由图像的一阶导数估算出自相关度量,得到像素点的局部相关矩阵,即若相关矩阵M的两个特征值都较大,则此时像素点判定为交叉点.Harris算法是一种非常有效的图像交叉点提取算法,提取的交叉点均匀合理,且算法稳定,利用Harris检测算法对图1(a)检测得到的交叉点如图2(a)所示,利用Harris算法检测交叉点对非极大值抑制后及双阈值后的边缘像素进行连接.基于以上的分析,本文提出的改进Canny算法步骤如下:(1)利用高斯函数对图像进行平滑来计算图像梯度,并获得相应的梯度幅度映射和梯度方向映射.二维高斯核函数其中(x,y)为直角坐标系中坐标;σ为高斯函数尺度因子.利用二位高斯核函数对图像I(x,y)进行卷积并分别求x轴和y轴的偏导数则图像每个像素的梯度幅值Mgrad(x,y)及所对应的梯度方向α(x,y)分别为(2)利用非极大值抑制和双阈值来抑制虚假边缘.为了使边缘定位更准确,需要细化边缘,按照梯度幅值和梯度方向保留梯度幅值的局部极大值点,即非极大值抑制.若像素点的梯度幅值大于沿梯度方向的像素两侧的梯度幅值,则判定该像素点为候选边缘点,如图3所示.假定梯度方向如图3所示,则梯度方向两侧的像素梯度幅度值可由邻点像素线性插值得到:图3 非极大值抑制示意图当且仅当该像素点梯度幅值大于μ1(x,y)和μ2(x,y)时,将该点标记为候选边缘点,根据类似方法可以得到所有候选边缘点,记为集合.双阈值处理中采用高低阈值,高阈值Th的设置主要按照边缘强度的直方图分布经验设定.而低阈值按照经验一般取成Tl=0.4Th.在集合中候选边缘的归一化梯度幅值超过高阈值的像素被判决为边缘点,称作强边缘像素.在集合中归一化梯度幅值介于高低阈值之间的像素点是待选边缘点.当且仅当它们按照4或8邻域在集合中连通到某个强边缘像素时才被判定为边缘像素,最后经形态学细化处理得到最终边缘图像.图4 边缘连接结果(3)利用上述提出的边缘连接算法对步骤(1)得到的边缘像素点进行连接,得到最终的边缘映射图.若有一边缘像素点Ei是某一条边缘线的起点或终点,则判定它周围领域(如5×5)内是否存在其边缘线的另一个端点或者其它边缘轮廓线的像素点:① 若存在其边缘线的另一个端点,则把两个端点间的梯度值大的像素点连接起来(宽度为一个像素).如图4(b)和(c)所示,Canny算法在对边缘线1进行连接时存在一个缺口,而本文算法可以把边缘线1完整连接.若存在另一条边缘轮廓线的像素点,则利用Harris算法判定交叉点的位置;② 若交叉点在另一边缘轮廓线上,则把边缘像素点Ei和交叉点之间梯度值大的像素点连接起来.如图4(c)所示,本文算法可以很好地把边缘线2连接起来,而Canny算法的连接结果如图4(b)所示.若交叉点不在另一条边缘线上,如图1(a)检测到的交叉点,则把边缘像素点Ei与交叉点之间梯度值大的像素点连接起来,图1(a)的边缘连接结果如图2(b)所示.3 结果与分析为评估所提出算法的性能,分别将传统Canny边缘算子和本文提出的Canny边缘算子改进算法应用于积木图像和Camera图像的边缘检测,其检测结果如图5~6所示.由图5和图6结果可以看出,传统Canny边缘检测虽然检测结果较好,但却存在许多边缘不连接点,如图5(b)和图6(b)中‘O’标记处.而改进后的Canny边缘算子在继承传统Canny边缘算子良好检测性能的同时也检测出Canny 边缘算子漏检边缘,检测边缘连接性好,检测性能优于传统Canny算法.图5 积木图像边缘检测结果图6 Camera图像边缘检测结果图像普通边缘点处灰度变化是一致的而在交叉点附近图像灰度变化是各向异性的,因此利用传统Canny边缘算子检测边缘图像在某些边缘交叉点附近会造成断裂现象,Harris交叉点检测算法可以准确且稳定地检测交叉点.通过检测交叉点附近邻域是否有边缘像素点,对边缘像素点和交叉点间进行边缘连接来寻找漏检边缘像素,本文提出的Canny边缘算子的改进算法会得到更加完整的边缘.4 结束语传统Canny边缘检测算法利用二维高斯核函数一阶偏导数对边缘检测算法的3个准则进行最佳近似,边缘检测性能较好,但会造成交叉点附近边缘点的漏检现象.本文提出Canny算子的改进算法,结合Canny算法和Harris算法对交叉点附近边缘进行连接,具有优于传统Canny算子的性能.【相关文献】[1] RAFAEL C G,RICHARD E W.Digital image processing[M].3rd ed.Boston:Addison -Wesley,1992:282-315;567-608.[2] HARALICK R.Digital step edges from zero crossing of second directional derivatives [J].IEEE Trans on Pattern A-nalysis and Machine Intelligence,1984,6(1):58-68. [3] ZIOU D,TABBONE S.Edge detection techniques——An overview[J].International Journal of Pattern Recognition and Image Analysis,1998,8(3):537-559.[4] RAJAB M,WOOLFSON M,MORGAN S P.Application of region-based segmentation and neural network edge detection to skin lesions[J].Computerized Medical Imaging and Graphics,2004,28(1):61-68.[5]PELLEGRINO F,VANZELLA W.Edge detection revisited[J].IEEE Trans on Systems,Man and Cybernetics,2004,34(2):1500-1518.[6] MARR D,HILDRETH E.Theory of edge detection[J].Proceedings of the Royal Society of London(Series B):Biological Sciences,1980,207(2):187-217.[7] MILAN S,VACLAV H.图像处理、分析与机器视觉[M].2版.北京:人民邮电出版社,2002:39-72.[8] CANNY J.A computational approach to edge detection[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1986,8(6):679-698.[9]吕哲,王福利,常玉清.一种改进的Canny边缘检测算法[J].东北大学学报:自然科学版,2007,28(12):1681-1684.[10]余洪山,王耀南.一种改进型Canny边缘检测算法[J].计算机工程与应用,2004,20(2):27-29.[11]王娜,李霞.一种新的改进Canny边缘检测算法[J].深圳大学学报:理工版,2013,22(2):149-153.[12]薛丽霞,李涛,王佐成.一种自适应的Canny边缘检测算法[J].计算机应用研究,2010,27(9):43-48.[13]章为川,水鹏郎.利用各向异性高斯方向导数相关矩阵的角点检测[J].西安交通大学学报,2012,46(11):91-98.[14] DING L,GOSHTASBY A.On the Canny edge detector[J].Pattern Recognition,2001,34(2):721-725.[15] HARRIS C,STEPHENS M.A combined corner and edge detector[C]//Proc 4th Alvey Vision Conf,Manchester:U-niversity of Sheflield Printing Office,1988:147-151.[16] MORAVEC H P.Toward automatic visual obstacle avoidance[C]//5th International Joint Conference on Artificial Intelligence,San Francisco:Morgan Kaufmunn Publishers Inc,1977:584.。
基于Canny算子的图像边缘检测实现
连接起 来为 止 。
c a n n y 算 子 边缘 检测 算法可 分为 四步 : 高斯滤 波器 平滑 、 一 阶偏 导的梯 度 计算 、 梯 度 幅值 的 非极大 值抑 制 、 双 阈值 算法 检测 和连 接边 缘 。 S t e p l : 高 斯 滤波 器 平滑 。 由于高斯 滤波器 对抑 制服从正 态分布 的噪声很有 效 , 并且 随着高斯模 板 的
) 反映了图像的边缘强度 , O ( x , ) 反映了 边缘的方向。
S e t p 3 : 梯 度 幅值 的 非极 大值 抑 制 仅仅 得到 全局 的梯度 并不足 以确 定边缘 , 因此为确 定边 缘 , 必须保 留局 部 梯 度 最大 的点 , 抑 制非极 大值 。 在 每一 点上 , 邻 域 的中心像 素 M 与沿梯 度线 的 两个像 , 则 令
太 实用 。 近 十年 来 , 有很 多学者 采 用不 同的方 法研 究如何 提取 受 噪声劣化 图像
厂 【 1 — 1 、 一 1 — 1 、 j 1 厂 【 1 1 J
—
1
梯 度 的幅值 和方 位角 可用 直角坐 标 到极坐 标转 换公 式计 算 :
M( x , ) = √ ( x , ) + G 2 、 X , y )
3 C a n n y 算子的边缘检测算法仿真
本文 实验 中利用 4 0 0X 4 0 0 莱娜 灰度 图,  ̄Ma t l a b 中编写程 序 , 实 现C a n n y 算 子 的边 缘 检测 算法 仿真 。 程 序如 下 : i mg = i mr e a d ( g i r 1 . J p g 。 ) ; i mg B mp = r g b 2 g r a y ( i mg ) ; s u b p l o t ( I , 2 , 1 ) ; i ms h o w( i mg B mp ) ; t i t l e ( 原灰 度 图 ’ ) ;
matlabcanny算子边缘检测函数代码

分享到:2012-04-24 20:42网友采纳clcclear allclose allI = imread('cameraman.tif'); % 读入图像imshow(I);title('原图')BW1 = edge(I,'canny'); % 调用canny函数figure,imshow(BW1); % 显示分割后的图像,即梯度图像title('Canny')用Lena标准检测图像,图像与代码下面注明了是哪张图像。
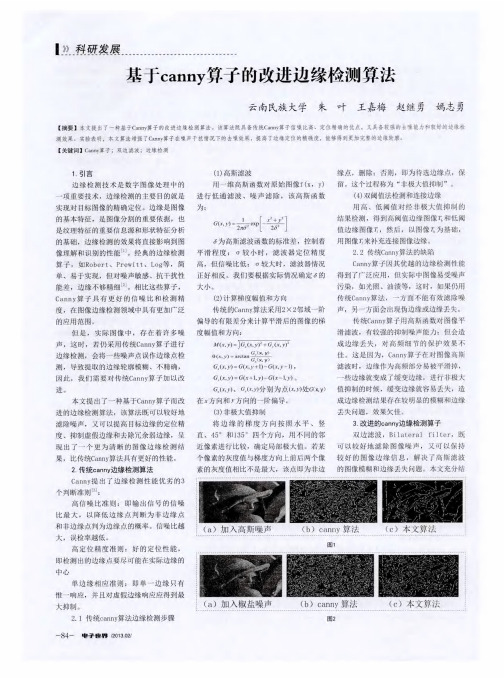
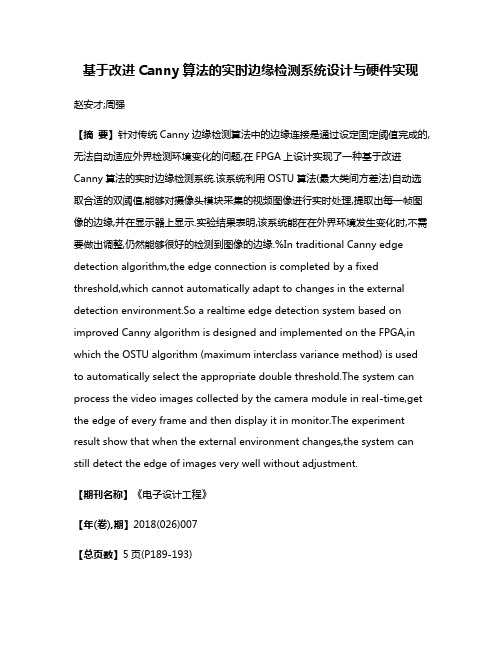
一、没有噪声时的检测结果 1 原始图像2 Sobel算子边缘检测3 Prewitt算子边缘检测4 Roberts算子边缘检测5 Laplace算子边缘检测6 Canny算子边缘检测二、加入高斯噪声(μ=0,σ^2=0.01)检测结果 1 原始图像2 Sobel算子边缘检测3 Prewitt算子边缘检测4 Roberts算子边缘检测5 Laplace算子边缘检测6 Canny算子边缘检测三、加入高斯噪声(μ=0,σ^2=0.02)检测结果 1 原始图像2 Sobel算子边缘检测3 Prewitt算子边缘检测4 Roberts算子边缘检测5 Laplace算子边缘检测6 Canny算子边缘检测clear all; close all;warning off all;I = imread('lena.bmp'); %%如果是其他类型图像,请先转换为灰度图%%没有噪声时的检测结果BW_sobel = edge(I,'sobel');BW_prewitt = edge(I,'prewitt');BW_roberts = edge(I,'roberts');BW_laplace = edge(I,'log');BW_canny = edge(I,'canny'); figure(1);subplot(2,3,1),imshow(I),xlabel('原始图像');subplot(2,3,2),imshow(BW_sobel),xlabel('sobel检测');subplot(2,3,3),imshow(BW_prewitt),xlabel('prewitt检测');subplot(2,3,4),imshow(BW_roberts),xlabel('roberts检测');subplot(2,3,5),imshow(BW_laplace),xlabel('laplace检测');subplot(2,3,6),imshow(BW_canny),xlabel('canny检测');%%加入高斯噪声(μ=0,σ^2=0.01)检测结果I_g1 = imnoise(I,'gaussian',0,0.01);BW_sobel = edge(I_g1,'sobel');BW_prewitt = edge(I_g1,'prewitt');BW_roberts = edge(I_g1,'roberts');BW_laplace = edge(I_g1,'log');BW_canny = edge(I_g1,'canny'); figure(2);subplot(2,3,1),imshow(I_g1),xlabel('加入高斯噪声(μ=0,σ^2=0.01)图像'); subplot(2,3,2),imshow(BW_sobel),xlabel('sobel检测');subplot(2,3,3),imshow(BW_prewitt),xlabel('prewitt检测');subplot(2,3,4),imshow(BW_roberts),xlabel('roberts检测');subplot(2,3,5),imshow(BW_laplace),xlabel('laplace检测');subplot(2,3,6),imshow(BW_canny),xlabel('canny检测');%%加入高斯噪声(μ=0,σ^2=0.02)检测结果I_g2 = imnoise(I,'gaussian',0,0.02);BW_sobel = edge(I_g2,'sobel');BW_prewitt = edge(I_g2,'prewitt');BW_roberts = edge(I_g2,'roberts');BW_laplace = edge(I_g2,'log');BW_canny = edge(I_g2,'canny'); figure(3);subplot(2,3,1),imshow(I_g2),xlabel('加入高斯噪声(μ=0,σ^2=0.02)图像'); subplot(2,3,2),imshow(BW_sobel),xlabel('sobel检测');subplot(2,3,3),imshow(BW_prewitt),xlabel('prewitt检测');subplot(2,3,4),imshow(BW_roberts),xlabel('roberts检测');subplot(2,3,5),imshow(BW_laplace),xlabel('laplace检测');subplot(2,3,6),imshow(BW_canny),xlabel('canny检测');199条建筑设计知识1. 公共建筑通常以交通、使用、辅助三种空间组成2. 美国著名建筑师沙利文提出的名言‘形式由功能而来’3. 密斯.凡.德.罗设计的巴塞罗那博览会德国馆采用的是‘自由灵活的空间组合’开创了流动空间的新概念4. 美国纽约赖特设计的古根海姆美术馆的展厅空间布置采用形式是串联式5. 电影放映院不需采光6. 点式住宅可设天井或平面凹凸布置可增加外墙面,有利于每层户数较多时的采光和通风7. 对结构形式有规定性的有大小和容量、物理环境、形状的规定性8. 功能与流线分析是现代建筑设计最常用的手段9. 垂直方向高的建筑需要考虑透视变形的矫正10. 橙色是暖色,而紫色含有蓝色的成分,所以偏冷;青色比黄色冷、红色比黄色暖、蓝色比绿色冷11. 同样大小冷色调较暖色调给人的感觉要大12. 同样距离,暖色较冷色给人以靠近感13. 为保持室内空间稳定感,房间的低处宜采用低明度色彩14. 冷色调给人以幽雅宁静的气氛15. 色相、明度、彩度是色彩的三要素;三元色为红、黄、蓝16. 尺度的概念是建筑物整体或局部给人的视角印象大小和其实际大小的关系17. 美的比例,必然正确的体现材料的力学特征18. 不同文化形成独特的比例形式19. 西方古典建筑高度与开间的比例,愈高大愈狭长,愈低矮愈宽阔20. ‘稳定’所涉及的要素是上与下之间的相对轻重关系的处理21. 人眼观赏规律H 18°~45°局部、细部2H 18°~27°整体3H <18°整体及环境22. 黄金分隔比例为1:1.61823. 通风屋面只能隔离太阳辐射不能保温,适宜于南方24. 总图布置要因地制宜,建筑物与周围环境之间关系紧凑,节约因地;适当处理个体与群体,空间与体形,绿化和小品的关系;合理解决采光、通风、朝向、交通与人流的组织25. 热水系统舒适稳定适用于居住建筑和托幼蒸汽系统加热快,适用于间歇采暖建筑如会堂、剧场26. 渐变具有韵律感27. 要使一座建筑显得富有活力,形式生动,在构图中应采用对比的手法对比的手法有轴线对比、体量对比、方向对比、虚实对比、色彩对比28. 要使柱子看起来显得细一些,可以采用暗色和冷色29. 巴西国会大厅在体型组合中采用了对比与协调的手法30. 展览建筑应使用穿套式的空间组合形式31. 室外空间的构成,主要依赖于建筑和建筑群体组合32. 在意大利威尼斯的圣马可广场的布局中,采用了强调了各种空间之间的对比33. 当坡地坡度较缓时,应采用平行等高线布置34. 建筑的有效面积=建筑面积-结构面积35. 加大开窗面积的方法来解决采光和通风问题较易办到36. 中国古代木结构大致可分为抬梁式、穿斗式和井干式三种37. 建筑构图原理的基本范畴有主从与重点、对比与呼应、均衡与稳定、节奏与韵律和比例与尺度38. 建筑构图的基本规律是多样统一39. 超过8层的建筑中,电梯就成为主要的交通工具了40. 建筑的模数分为基本模数、扩大模数和分模数41. 建筑楼梯梯段的最大坡度不宜超过38°42. 住宅起居室、卧室、厨房应直接采光,窗地比为1/7,其他为1/1243. 住宅套内楼梯梯段的最小净宽两边墙的0.9M,一边临空的0.75M住宅室内楼梯踏步宽不应小于0.22M,踏步高度不应小大0.20M44. 住宅底层严禁布置火灾危险性甲乙类物质的商店,不应布置产生噪声的娱乐场所45. 地下室、贮藏室等房间的最低净高不应低于2.0米46. 室内坡道水平投影长度超过15米时,宜设休息平台47. 外墙内保温所占面积不计入使用面积烟道、风道、管道井不计入使用面积阳台面积不计入使用面积壁柜应计入使用面积48. 旋转楼梯两级的平面角度不大于10度,且每级离内侧扶手中心0.25处的踏步宽度要大于0.22米49. 两个安全出口之间的净距不应小于5米50. 楼梯正面门扇开足时宜保持0.6米平台净宽,侧墙门口距踏步不宜小于0.4米,其门扇开足时不应减少梯段的净宽35. 加大开窗面积的方法来解决采光和通风问题较易办到36. 中国古代木结构大致可分为抬梁式、穿斗式和井干式三种37. 建筑构图原理的基本范畴有主从与重点、对比与呼应、均衡与稳定、节奏与韵律和比例与尺度38. 建筑构图的基本规律是多样统一39. 超过8层的建筑中,电梯就成为主要的交通工具了40. 建筑的模数分为基本模数、扩大模数和分模数41. 建筑楼梯梯段的最大坡度不宜超过38°42. 住宅起居室、卧室、厨房应直接采光,窗地比为1/7,其他为1/1243. 住宅套内楼梯梯段的最小净宽两边墙的0.9M,一边临空的0.75M住宅室内楼梯踏步宽不应小于0.22M,踏步高度不应小大0.20M44. 住宅底层严禁布置火灾危险性甲乙类物质的商店,不应布置产生噪声的娱乐场所45. 地下室、贮藏室等房间的最低净高不应低于2.0米46. 室内坡道水平投影长度超过15米时,宜设休息平台47. 外墙内保温所占面积不计入使用面积烟道、风道、管道井不计入使用面积阳台面积不计入使用面积壁柜应计入使用面积48. 旋转楼梯两级的平面角度不大于10度,且每级离内侧扶手中心0.25处的踏步宽度要大于0.22米49. 两个安全出口之间的净距不应小于5米50. 楼梯正面门扇开足时宜保持0.6米平台净宽,侧墙门口距踏步不宜小于0.4米,其门扇开足时不应减少梯段的净宽35. 加大开窗面积的方法来解决采光和通风问题较易办到36. 中国古代木结构大致可分为抬梁式、穿斗式和井干式三种37. 建筑构图原理的基本范畴有主从与重点、对比与呼应、均衡与稳定、节奏与韵律和比例与尺度38. 建筑构图的基本规律是多样统一39. 超过8层的建筑中,电梯就成为主要的交通工具了40. 建筑的模数分为基本模数、扩大模数和分模数41. 建筑楼梯梯段的最大坡度不宜超过38°42. 住宅起居室、卧室、厨房应直接采光,窗地比为1/7,其他为1/1243. 住宅套内楼梯梯段的最小净宽两边墙的0.9M,一边临空的0.75M住宅室内楼梯踏步宽不应小于0.22M,踏步高度不应小大0.20M44. 住宅底层严禁布置火灾危险性甲乙类物质的商店,不应布置产生噪声的娱乐场所45. 地下室、贮藏室等房间的最低净高不应低于2.0米46. 室内坡道水平投影长度超过15米时,宜设休息平台47. 外墙内保温所占面积不计入使用面积烟道、风道、管道井不计入使用面积阳台面积不计入使用面积壁柜应计入使用面积48. 旋转楼梯两级的平面角度不大于10度,且每级离内侧扶手中心0.25处的踏步宽度要大于0.22米49. 两个安全出口之间的净距不应小于5米50. 楼梯正面门扇开足时宜保持0.6米平台净宽,侧墙门口距踏步不宜小于0.4米,其门扇开足时不应减少梯段的净宽51. 入地下车库的坡道端部宜设挡水反坡和横向通长雨水篦子52. 室内台阶宜150*300;室外台阶宽宜350左右,高宽比不宜大于1:2.553. 住宅公用楼梯踏步宽不应小于0.26M,踏步高度不应大于0.175M54. 梯段宽度不应小于1.1M(6层及以下一边设栏杆的可为1.0M),净空高度2.2M55. 休息平台宽度应大于梯段宽度,且不应小于1.2M,净空高度2.0M56. 梯扶手高度0.9M,水平段栏杆长度大于0.5M时应为1.05M57. 楼梯垂直杆件净空不应大于0.11M,梯井净空宽大于0.11M时应采取防护措施58. 门洞共用外门宽1.2M,户门卧室起居室0.9M,厨房0.8M,卫生间及阳台门0.7M,所有门洞高为2.0M59. 住宅层高不宜高于2.8M60. 卧室起居室净高≥2.4M,其局部净高≥2.1M(且其不应大于使用面积的1/3)61. 利用坡顶作起居室卧室的,一半面积净高不应低于2.1M利用坡顶空间时,净高低于1.2M处不计使用面积;1.2--2.1M计一半使用面积;高于2.1M全计使用面积62. 放家具墙面长3M,无直接采光的厅面积不应大于10M263. 厨房面积Ⅰ、Ⅱ≥4M2;Ⅲ、Ⅳ≥5M264. 厨房净宽单面设备不应小于1.5M;双面布置设备间净距不应小于0.9M65. 对于大套住宅,其使用面积必须满足45平方米66. 住宅套型共分四类使用面积分别为34、45、56、68M267. 单人卧室≥6M2;双人卧室≥10M2;兼起居室卧室≥12M2;68. 卫生间面积三件3M2;二件2--2.5M2;一件1.1M269. 厨房、卫生间净高2.2M70. 住宅楼梯窗台距楼地面净高度低于0.9米时,不论窗开启与否,均应有防护措施71. 阳台栏杆净高1.05M;中高层为1.1M(但要<1.2);杆件净距0.1172. 无外窗的卫生间应设置防回流构造的排气通风道、预留排气机械的位置、门下设进风百叶窗或与地面间留出一定缝隙73. 每套应设阳台或平台、应设置晾衣设施、顶层应设雨罩;阳台、雨罩均应作有组织排水;阳台宜做防水;雨罩应做防水74. 寒冷、夏热冬冷和夏热冬暖地区的住宅,西面应采取遮阳措施75. 严寒地区的住宅出入口,各种朝向均应设防寒门斗或保温门76. 住宅建筑中不宜设置的附属公共用房有锅炉房、变压器室、易燃易爆化学物品商店但有厨房的饮食店可设77. 住宅设计应考虑防触电、防盗、防坠落78. 跃层指套内空间跨跃两楼层及以上的住宅79. 在坡地上建住宅,当建筑物与等高线垂直时,采用跌落方式较为经济80. 住宅建筑工程评估指标体系表中有一级和二级指标81. 7层及以上(16米)住宅必须设电梯82. 宿舍最高居住层的楼地面距入口层地面的高度大于20米时,应设电梯83. 医院病房楼,设有空调的多层旅馆,超过5层的公建室内疏散楼梯,均应设置封闭楼梯间(包括首层扩大封闭楼梯间)设歌舞厅放映厅且超过3层的地上建筑,应设封闭楼梯间。
canny边缘检测C++手动实现
canny边缘检测C++⼿动实现边缘检测的⼀般步骤:第⼀步:滤波边缘检测的算法主要是基于图像强度的⼀阶和⼆阶导数,但导数通常对噪声很敏感,因此必须采⽤滤波器来改善与噪声有关的边缘检测器的性能。
常见的滤波⽅法主要有⾼斯滤波,即采⽤离散化的⾼斯函数产⽣⼀组归⼀化的⾼斯核,然后基于⾼斯核函数对图像灰度矩阵的每⼀点进⾏加权求和。
第⼆步:增强增强边缘的基础是确定图像各个点邻域强度的变化值。
增强算法可以将图像灰度点邻域强度值有显著变化的点凸显出来。
在具体编程实现时,可通过计算梯度幅值来确定。
第三步:检测经过增强的图像,往往邻域中有很多点的梯度值⽐较⼤,⽽在特定的应⽤中,这些点并不是要找的边缘点,所以应该采⽤某种⽅法来对这些点进⾏取舍。
实际⼯程中,常⽤的⽅法是通过阈值化⽅法来检测。
实现步骤:(1)⾼斯模糊(2)边缘梯度(3)综合梯度(4)依据梯度⽅向做⾮极⼤值抑制(5)使⽤上下阈值检测边缘(6)连接边缘canny.cpp#include "iostream"#include "opencv2/opencv.hpp"#include "imgproc.h"#include "characterproc.h"using namespace cv;using namespace std;int main(){//1,读取图像String img_path = "/home/whf/PycharmProjects/Tool/data/motion_data/trafficcone_src/10.jpg";Mat img_src = imread(img_path);Mat img_gray = Mat(img_src.rows,img_src.cols,CV_8UC1,Scalar(0));//1.1 灰度变换img_gray = rgb2gray(img_src,"eyeperception");//2,⾼斯模糊Mat img_gauss = gaussproc(img_gray);//3,求梯度Mat xy_grad = Mat(img_src.rows,img_src.cols,CV_8UC1,Scalar(0));Mat th_gra = Mat(img_src.rows,img_src.cols, CV_8UC1, Scalar(0));xy_grad = xy_gradient(img_gauss);//imshow("th_gra",th_gra);//4,梯度的⾮极⼤值抑制Mat img_nms = Mat(img_src.rows,img_src.cols,CV_8UC1,Scalar(0));img_nms = grad_nms(xy_grad);//5,使⽤上下阈值检测边缘Mat img_thresh = Mat(img_src.rows,img_src.cols,CV_8UC1,Scalar(0));img_thresh = double_thresh(img_nms, 60, 100);imshow("img_thresh",img_thresh);//6,抑制独⽴的弱边缘Mat img_link = Mat(img_src.rows,img_src.cols,CV_8UC1,Scalar(0));img_link = link_eage(img_thresh);imshow("img_link",img_link);waitKey(0);return0;}imgproc.cpp#include "imgproc.h"#include "characterproc.h"#include "gauss.h"#include "assert.h"using namespace cv;Mat rgb2gray(Mat rgb_img, string type){Mat img_src = rgb_img.clone();int cols = rgb_img.cols;int rows = rgb_img.rows;Mat img = Mat(rows, cols, CV_8UC1, Scalar(0));if(stringisequal(type, "eyeperception")){for(int i = 0; i<rows; i++){for(int j = 0; j<cols; j++){Vec3b pix = img_src.at<Vec3b>(i,j);img.at<uchar>(i,j) = (pix[0]*0.114 + pix[1]*0.55 + pix[2]*0.34);}}return img;}if(stringisequal(type, "avg")){for(int i = 0; i<cols; i++){for(int j = 0; j<rows; j++){Vec3b pix = rgb_img.at<Vec3b>(i,j);img.at<uchar>(i,j) = (pix[0] + pix[1] + pix[2])/3;}}return img;}}Mat gaussproc(Mat img){int c = img.channels();assert(c == 1);Mat img_src = img.clone();int cols = img_src.cols;int rows = img_src.rows;Mat img_gauss(rows, cols, CV_8UC1, Scalar(0));float **ker = gauss_kernel(3, 0.01);//paddingMat img_pad = Mat(rows+2, cols+2, CV_8UC1, Scalar(0));img_src.copyTo(img_pad(Rect(1,1,cols,rows)));for(int i=0; i < rows; i++){for(int j=0;j<cols;j++){img_gauss.at<uchar>(i,j) = ker[0][0]*img_pad.at<uchar>(i-1,j-1) + ker[0][1]*img_pad.at<uchar>(i-1,j) + ker[0][2]*img_pad.at<uchar>(i-1,j+1) + ker[1][0]*img_pad.at<uchar>(i,j-1) + ker[1][1]*img_pad.at<uchar>(i,j) + ker[1][2]*img_pad.at<uchar>(i,j+1)+ ker[2][0]*img_pad.at<uchar>(i+1,j+1) + ker[2][1]*img_pad.at<uchar>(i+1,j) + ker[2][2]*img_pad.at<uchar>(i+1,j+1);}}delete_kernel(ker,3);return img_gauss;}Mat x_gradient(Mat img){Mat img_src = img.clone();int cols = img_src.cols;int rows = img_src.rows;Mat x_gra = Mat(rows, cols, CV_8UC1, Scalar(0));for(int i = 0; i < rows-1; i++){for (int j = 0; j < cols-1; j++){x_gra.at<uchar>(i,j) = abs(img_src.at<uchar>(i,j) -img_src.at<uchar>(i+1,j) + img_src.at<uchar>(i,j+1) -img_src.at<uchar>(i+1,j+1) )/2;}}return x_gra;}Mat y_gradient(Mat img){Mat img_src = img.clone();int cols = img_src.cols;int rows = img_src.rows;Mat y_gra = Mat(rows, cols, CV_8UC1, Scalar(0));for(int i = 0; i < rows-1; i++){for (int j = 0; j < cols-1; j++){y_gra.at<uchar>(i,j) = abs(img_src.at<uchar>(i,j) - img_src.at<uchar>(i,j+1) + img_src.at<uchar>(i+1,j) - img_src.at<uchar>(i+1,j+1));}}return y_gra;}Mat xy_gradient(Mat img){Mat img_src = img.clone();int cols = img_src.cols;int rows = img_src.rows;Mat x_gra = x_gradient(img_src);Mat y_gra = y_gradient(img_src);Mat xy_gra = Mat(rows, cols, CV_8UC1, Scalar(0));for(int i = 0; i < rows-1; i++){for (int j = 0; j < cols-1; j++){//if(y_gra.at<uchar>(i,j)==0) y_gra.at<uchar>(i,j)=1;//th_gra = atan(abs(x_gra.at<uchar>(i,j))/abs(y_gra.at<uchar>(i,j)))*57.3 + 90;xy_gra.at<uchar>(i,j) = sqrt( (x_gra.at<uchar>(i,j) * x_gra.at<uchar>(i,j)) + (y_gra.at<uchar>(i,j) * y_gra.at<uchar>(i,j)) );if (xy_gra.at<uchar>(i,j)>255) xy_gra.at<uchar>(i,j)=255;//if (xy_gra.at<uchar>(i,j)<200) xy_gra.at<uchar>(i,j)=0;}}return xy_gra;}Mat grad_nms(Mat img){Mat img_src = img.clone();int cols = img_src.cols;int rows = img_src.rows;Mat gra_nms = Mat(rows, cols, CV_8UC1, Scalar(0));for (int i = 1; i < rows-1; i++){for(int j = 1; j<cols-1; j++){int val00 = img_src.at<uchar>(i-1,j-1);int val01 = img_src.at<uchar>(i-1,j);int val02 = img_src.at<uchar>(i-1,j + 1);int val10 = img_src.at<uchar>(i,j-1);int val11 = img_src.at<uchar>(i,j);int val12 = img_src.at<uchar>(i,j + 1);int val20 = img_src.at<uchar>(i+1,j-1);int val21 = img_src.at<uchar>(i+1,j);int val22 = img_src.at<uchar>(i+1,j + 1);if(val11<val00 | val11<val01 | val11 < val02 | val11 < val10 | val11<val12 | val11<val21 | val11<val22 | val11 < val20) img_src.at<uchar>(i,j)=0; }}return img_src;}Mat double_thresh(Mat img, int minthresh, int maxthresh){Mat img_src = img.clone();int cols = img_src.cols;int rows = img_src.rows;for (int i = 1; i < rows; i++){for(int j = 1; j<cols; j++){if(img_src.at<uchar>(i,j) > maxthresh) img_src.at<uchar>(i,j) = 255;if(img_src.at<uchar>(i,j) < minthresh) img_src.at<uchar>(i,j) = 0;}}return img_src;}Mat link_eage(Mat img){Mat img_src = img.clone();int cols = img_src.cols;int rows = img_src.rows;Mat img_l = Mat(rows, cols, CV_8UC1, Scalar(0));for(int i = 1; i < rows-1; i++){for(int j = 1; j < cols-1; j++){if((img_src.at<uchar>(i-1,j-1) == 255) | (img_src.at<uchar>(i-1,j) == 255) | (img_src.at<uchar>(i-1, j+1) == 255)| (img_src.at<uchar>(i, j-1) == 255) | (img_src.at<uchar>(i, j+1) == 255)| (img_src.at<uchar>(i+1, j-1) == 255) | (img_src.at<uchar>(i+1,j) == 255) | (img_src.at<uchar>(i+1,j+1) == 255)) {img_l.at<uchar>(i,j) = 255;}else{img_l.at<uchar>(i,j) = img_src.at<uchar>(i,j);}}}return img_l;}imgproc.h#include "opencv2/opencv.hpp"#include "math.h"using namespace cv;using namespace std;Mat rgb2gray(Mat rgb_img, string type);Mat gaussproc(Mat img);Mat x_gradient(Mat img);Mat y_gradient(Mat img);Mat xy_gradient(Mat img);Mat grad_nms(Mat img);Mat double_thresh(Mat img, int minthresh, int maxthresh);Mat link_eage(Mat img);gauss.cpp#include <gauss.h>#include <math.h>#define pi 3.1415926using namespace std;float** gauss_kernel(int k, float sigm){//printf("k: %d, sigm: %f\n",k,sigm);float **M;float sum = 0;M = new float *[k];for(int i = 0; i < k; i++){M[i] = new float[k];}for(int i = -(k-1)/2; i < (k-1)/2+1; i++){for(int j = -(k-1)/2; j < (k-1)/2+1; j++){float f1 = 1./(2*pi*pow(sigm, 2));float f2 = -(pow(i,2)+pow(j,2));float f3 = f2/(2*pow(sigm, 2));M[i+(k-1)/2][j+(k-1)/2] = f1*exp(f3);sum = sum+M[i+(k-1)/2][j+(k-1)/2];//printf("%f\t",M[i+(k-1)/2][j+(k-1)/2]);}//printf("\n");}//归⼀化for(int i = 0; i < k; i++){for(int j = 0; j < k; j++){M[i][j] = M[i][j]/sum;}}return M;}void delete_kernel(float** M,int k){for(int i = 0; i < k; i++){delete[] M[i];M[i] = nullptr;}delete[] M;M = nullptr;}gauss.h#include "iostream"float** gauss_kernel(int k, float sigm); void delete_kernel(float** M,int k); characterproc.cpp#include "characterproc.h"bool stringisequal(string A, string B) {int lenA = A.length();int lenB = B.length();if(lenA!=lenB) return false;for(int i = 0; i<lenA; i++){if(A[i]!=B[i]) return false;}return true;}characterproc.h#include "iostream"using namespace std;bool stringisequal(string A, string B);。
(完整版)Canny边缘检测算法总结

一.Canny边缘检测算法原理JohnCanny于1986年提出Canny算子,属于是先平滑后求导数的方法。
其处理过程大体上分为下面四部分。
1. 对原始图像进行灰度化Canny算法通常处理的图像为灰度图,因此如果获取的是彩色图像,那首先就得进行灰度化。
对一幅彩色图进行灰度化,就是根据图像各个通道的采样值进行加权平均。
以RGB格式的彩图为例,通常灰度化采用的方法主要有:方法1:Gray=(R+G+B)/3;方法2:Gray=0.299R+0.587G+0.114B;(这种参数考虑到了人眼的生理特点)至于其他格式的彩色图像,可以根据相应的转换关系转为RGB然后再进行灰度化;在编程时要注意图像格式中RGB的顺序通常为BGR。
2. 对图像进行高斯滤波图像高斯滤波的实现可以用两个一维高斯核分别两次加权实现,也可以通过一个二维高斯核一次卷积实现。
1)高斯核实现上式为离散化的一维高斯函数,确定参数就可以得到一维核向量。
上式为离散化的二维高斯函数,确定参数就可以得到二维核向量。
在求得高斯核后,要对整个核进行归一化处理。
2)图像高斯滤波对图像进行高斯滤波,其实就是根据待滤波的像素点及其邻域点的灰度值按照一定的参数规则进行加权平均。
这样可以有效滤去理想图像中叠加的高频噪声。
通常滤波和边缘检测是矛盾的概念,抑制了噪声会使得图像边缘模糊,这会增加边缘定位的不确定性;而如果要提高边缘检测的灵敏度,同时对噪声也提高了灵敏度。
实际工程经验表明,高斯函数确定的核可以在抗噪声干扰和边缘检测精确定位之间提供较好的折衷方案。
3. 用一阶偏导的有限差分来计算梯度的幅值和方向关于图像灰度值得梯度可使用一阶有限差分来进行近似,这样就可以得图像在x和y 方向上偏导数的两个矩阵。
常用的梯度算子有如下几种:1)Roberts算子上式为其x和y方向偏导数计算模板,可用数学公式表达其每个点的梯度幅值为:2)Sobel算子上式三个矩阵分别为该算子的x向卷积模板、y向卷积模板以及待处理点的邻域点标记矩阵,据此可用数学公式表达其每个点的梯度幅值为:3)Prewitt算子和Sobel算子原理一样,在此仅给出其卷积模板。
C语言实现opencv提取直线、轮廓及ROI实例详解

C语⾔实现opencv提取直线、轮廓及ROI实例详解⼀、Canny检测轮廓在上⼀篇⽂章中有提到sobel边缘检测,并重写了soble的C++代码让其与matlab中算法效果⼀致,⽽soble边缘检测是基于单⼀阈值的,我们不能兼顾到低阈值的丰富边缘和⾼阈值时的边缘缺失这两个问题。
⽽canny算⼦则很好的弥补了这⼀不⾜,从⽬前看来,canny边缘检测在做图像轮廓提取⽅⾯是最优秀的边缘检测算法。
canny边缘检测采⽤双阈值值法,⾼阈值⽤来检测图像中重要的、显著的线条、轮廓等,⽽低阈值⽤来保证不丢失细节部分,低阈值检测出来的边缘更丰富,但是很多边缘并不是我们关⼼的。
最后采⽤⼀种查找算法,将低阈值中与⾼阈值的边缘有重叠的线条保留,其他的线条都删除。
本篇⽂章中不对canny的算法原理作进⼀步说明,稍后会在图像处理算法相关的⽂章中详细介绍。
下⾯我们⽤OpenCV中的Canny函数来检测图像边缘int main(){Mat I=imread("../cat.png");cvtColor(I,I,CV_BGR2GRAY);Mat contours;Canny(I,contours,125,350);threshold(contours,contours,128,255,THRESH_BINARY);namedWindow("Canny");imshow("Canny",contours);waitKey();return 0;}显⽰效果如下:⼆、直线检测⽤到的是霍夫变换检测直线的算法直线在图像中出现的频率⾮常之⾼,⽽直线作为图像的特征对于基本内容的图像分析有着很重要的作⽤,本⽂通过OpenCV中的hough变换来检测图像中的线条。
我们先看最基本的Hough变换函数HoughLines,它的原型如下:void HoughLines(InputArray image, OutputArray lines, double rho, double theta, int threshold, double srn=0, double stn=0 );它的输⼊是⼀个⼆值的轮廓图像,往往是边缘检测得到的结果图像;它的输出是⼀个包含多个Vec2f点的数组,数组中的每个元素是⼀个⼆元浮点数据对<rou,theta>,rou代表直线离坐标原点的距离,theta代表⾓度。
简述canny边缘检测方法

简述canny边缘检测方法
Canny边缘检测方法是一种广泛应用于数字图像处理领域的算法,用于检测图像中的边缘。
它是由John Canny在1986年开发的,是一种基于多级梯度计算和非极大值抑制(Non-Maximum Suppression)的方法。
该算法的主要步骤包括以下几个步骤:
1. 高斯滤波:对图像进行高斯平滑滤波以去除噪声,同时模糊图像,使边缘在进行梯度计算时更平滑。
2. 梯度计算:使用Sobel等算子计算图像中每个像素点的梯度、方向和大小,从而找到边缘的位置。
3. 非极大值抑制:将检测到的梯度方向沿垂直方向上进行“压缩”,将每个像素点的位置更新为其在梯度方向上的最大值处。
4. 双重阈值:对非极大值抑制后的图像进行二值化操作,设定一个高阈值和低阈值,比较每个像素点的梯度大小是否高于高阈值或低于低阈值。
高于高阈值的点被标记为强边缘,低于低阈值的点被标记为背景,介于高低阈值之间的点被标记为弱边缘。
5. 边缘跟踪:将弱边缘与强边缘连接起来,最终得到连续的边缘。
Canny边缘检测方法具有较高的精度和鲁棒性,广泛应用于计算机视觉、机器视觉、物体检测等领域。
一种自适应的Canny边缘检测算法_薛丽霞
反映该窗口内像素的变换特点,若将此值作为参数 σ 的度量
标准之一,可以很好地兼顾到窗口内局部图像信息,而图像中
方差小的像素点往往是非边缘区域或被噪声污染较小的区域,
可以将该值作为边缘点和噪声点的参考,考虑到图像的整体特
性,将最小方差也作为参数 σ 的度量标准的恒定因子,参数 σ
的获取方法为
M
=
N
1 ×
相比传统的微分算子,基于最优化算法的 Canny 边缘检测 算子,因 具 有 信 噪 比 大 和 检 测 精 度 高 的 优 点 而 被 广 泛 应 用[3,4],但 Canny 边缘检测算子也存在一些不足。本文在分析 传统 Canny 算法的基础上,提出一种自适应的 Canny 边缘检测 算法,该算法采用自适应的滤波器对图像进行平滑处理,在去 除噪声的同时保留更多的边缘信息,随后根据图像特征自动确 定高低阈值。由于不需要人为的干扰,检测到的边缘信息较多 且算法的适应性较强。
图像边缘检测是图像分析和图像识别的基础。边缘是指周 围像素灰度值有阶跃或屋顶变化的像素集合,反映了图像灰度 的不连续性。实际图像中的边缘往往是多种目标边缘的组合, 所以在实际检测中是很困难的[1]。常用的边缘检测算子有一阶 微分 算 子 ( Roberts、Sobel、Prewitt、Krish 等) 、二 阶 微 分 算 子 ( Laplacian、Marr-Hildret 等[2]) ,这些算子都是通过模板与图像 卷积来提取边缘,其特点是计算简单、易于实现,但常常会丢失 一些边缘信息,尤其是对含有噪声的图像边缘检测效果更差。
基于canny算子的边缘检测算法应用研究
基于canny算子的边缘检测算法应用研究作者:陈蒙来源:《电子技术与软件工程》2013年第23期摘要:边缘检测技术是图像处理过程的重要一环,本文主要研究基于canny算则的边缘检测算法中的抑制噪声、寻找亮度梯度、非极大值抑制、边缘的确定和连接等四个过程,并逐个分析其实现过程及作用。
【关键词】边缘检测高斯平滑1 引言随着图像处理技术的发展与广泛应用,现在社会中图像处理的应用领域越来越广泛,如三维重建,医学诊断,图像识别等等。
而图像处理过程中,最重要的一项预处理技术即为边缘检测技术。
图像的边缘是图像特征识别中的重要组成部分。
我们一般认为边缘是图像中周围像素有不连续变化或屋脊变化的像素的集合。
在一幅图像中,边缘特征所表达的信息量在整张图片的特征信息中占有主导地位,对图像特征的识别、分析十分重要。
边缘信息主要从像素值幅度和走向两个方面来表示。
一般来说,沿着边缘走向的像素点灰度值呈连续性变化特征,而垂直于边缘走向的像素点灰度值则呈跳跃性或阶跃性变化特征。
边缘检测技术即为通过一定的算法将图像中的边缘尽可能真实地提取或表示出来的技术。
边缘检测技术发展到目前已有很多类提取算法,但主要的计算原则就借助于类似高斯平滑、傅里叶变换等的数学函数与图像的灰度矩阵进行卷积计算,从而得到横、纵两个方向上的梯度图像和模图像,然后根据梯度方向来进行模的极大值提取,获得需要的图像特征边缘。
本文主要研究的是以canny算子为检测手段的边缘检测算法。
2 canny边缘检测算法任何一个边缘检测算法的原则都是真实、详尽地标识出原图像的实际边缘,同时又尽可能避免图像中的噪点、伪边缘等噪声的干扰,找到一个最优的图像边缘。
Canny边缘检测算法也是如此,一般由抑制噪声、寻找梯度亮度、非极大值抑制、确定和连接边缘这四步完成的。
2.1 1抑制噪声任何图像在进行边缘检测之前,都要进行抑制噪声的预处理。
它是所有图像处理过程的第一步。
图像的噪声主要有椒盐噪声和高斯噪声两种,而绝大部分图形的干扰噪声属于高斯噪声,因此canny算法的第一步采用的是运用二维高斯平滑模板与原图像数据进行卷积计算,而得到抑制噪声后的待处理图像。
一种改进的Canny的图像边缘检测算法的研究及实现
G ( ) = 赤e x p ( 一 )
( 1 )
G J , J ) = 【 , ( . - 1 ) + I ( i - 1 , , 一 1 ) 一 J ( f , ) 一 , ( 一 1 . J
:
( 4 )
针对 C a n n y 边缘检测算法 中人为设 定高 、 低 阈值 的缺 陷, 采用 基
科 技 论 坛
・ 4 1・
一
种改进的 C a n n y的图像边缘检测算法的研究及实现
胡 和 智 。 刘 军 芳 。 庞 晶 苏 双 臣 2
( 1 、 河北工业 大学信息工程学院 , 天津 3 0 0 4 0 1 2 、 河北工业大学 廊坊分校 , 河北 廊 坊 0 6 5 0 0 0 3 、 廊坊 师范学院, 河北 廊坊 0 6 5 0 0 0 )
可可
即 … c t a n
( 3 ) 对梯度 幅值进行非极大值抑制。 4 实 验 结 果 与分 析 要保证边缘的精确定 位 , 必须对梯度幅度值 图进行细化 。 C a n n y 由以上分析可知 , 改进 的 C a n n y 算 子边缘检测算法步骤如下 : 算子在这个过程 中使 用 3 x 3大小, 包括 8 个方 向的邻域对梯度幅值 ( 1 ) 用中值滤波对 图像平滑降噪 ; 阵列 M( I , i ) 的所 有像 素沿梯度方 向进行梯度幅值 的插值 。若邻域 中 ( 2 ) 用一阶偏导有 限差分计算梯度幅值及方 向; 心点的 幅值 M( I , j ) 不大 于梯 度方 向上 的两个 相邻插值,则该处 为非 ( 3 ) 对梯度幅值 进行 非极大值抑制 , 保 留局部梯度最大值 ; 边缘点且将 MO , j ) 赋值为 0 。若 UO , j ) 不小 于梯 度方 向上的两个相邻 ( 4 ) 用离散概率模 型的 自适应 阈值作为最佳 的阈值 ; 插值 , 则将 M ( I , i ) 点处作为初选边缘点 。 ( 5 ) 利用阈值对 图像检测并连接边论 “ 双 阈值 ” 检测。 C a n n y 算法产生 的梯度边缘图像 N O , j ) 灰度范围 实验结果表 明 , 本文提 出的采用 中值滤波 代替高斯滤波 的改进 比较大, 如果把 所有非零的梯度看作边缘就会 因此产生许 多虚假 边 同时基于 离散概率模 型( D i s c r e t e P r o b a b i l i t y Mo d e l , D P M ) 的自 缘, 所以C a n n y算法要求设定 高阈值 T h 和低阈值 T 图像 中每一点的 算 法 , 该方法计算简单, 选取的阈值大小适 中。不仅 可以检 梯 度幅度凡 是大于 T h的一定是边缘 ; 凡是梯度幅度小于 的一定 不 适应选取 阈值 , 同时检测出的背景杂质较少, 有利于后续处理 。 是 边缘 ; 如果介 于二者之间 , 那就看像 素的邻接像素 中有没有超 过 测到较准确的边缘 , 参 考 文献 T h 的点 : 如果有就该点 当作边缘点 , 否则就不是边缘点 。 1 ] 张素文, 陈志星, 苏义鑫. C a n n y边缘检测 算法的改进及 F P G A实现 连 接边缘 。由高 阈值检测得 到图像 丢失了一些边缘信息 , 同时 【 J J . 红 外技 术, 2 0 1 0 , 2 2 ( 2 ) : 9 3 — 9 6 . 中产生 了少量 的假边缘 ; 由低阈值检测得到 的图像产生 了少量伪边 [ 2 ] m佐成 , 刘 晓冬, 薛丽霞. C a n n y算子 边缘检测 的一种 改进方 法『 J 1 . 缘。 因此 我们将在 高阈值检测得到边缘的基础上连接由低阈值检测 [ 计算机工程与应用, 2 0 1 0 , 4 6 ( 3 4 ) : 2 0 2 — 2 0 4 . 得 到边缘 中可能 的边缘点 , 从 而获得相对连续 的图像边缘 。
边缘检测之Canny

边缘检测之Canny1. 写在前⾯最近在做边缘检测⽅⾯的⼀些⼯作,在⽹络上也找了很多有⽤的资料,感谢那些积极分享知识的先辈们,⾃⼰在理解Canny边缘检测算法的过程中也⾛了⼀些弯路,在编程实现的过程中,也遇到了⼀个让我怀疑⼈⽣的BUG(⽇了狗狗)。
就此写下此⽂,作为后记,也希望此篇⽂章可以帮助那些在理解Canny算法的道路上暂⼊迷途的童鞋。
废话少说,上⼲货。
2. Canny边缘检测算法的发展历史Canny边缘检测于1986年由JOHN CANNY⾸次在论⽂《A Computational Approach to Edge Detection》中提出,就此拉开了Canny边缘检测算法的序幕。
Canny边缘检测是从不同视觉对象中提取有⽤的结构信息并⼤⼤减少要处理的数据量的⼀种技术,⽬前已⼴泛应⽤于各种计算机视觉系统。
Canny发现,在不同视觉系统上对边缘检测的要求较为类似,因此,可以实现⼀种具有⼴泛应⽤意义的边缘检测技术。
边缘检测的⼀般标准包括:1) 以低的错误率检测边缘,也即意味着需要尽可能准确的捕获图像中尽可能多的边缘。
2) 检测到的边缘应精确定位在真实边缘的中⼼。
3) 图像中给定的边缘应只被标记⼀次,并且在可能的情况下,图像的噪声不应产⽣假的边缘。
为了满⾜这些要求,Canny使⽤了变分法。
Canny检测器中的最优函数使⽤四个指数项的和来描述,它可以由⾼斯函数的⼀阶导数来近似。
在⽬前常⽤的边缘检测⽅法中,Canny边缘检测算法是具有严格定义的,可以提供良好可靠检测的⽅法之⼀。
由于它具有满⾜边缘检测的三个标准和实现过程简单的优势,成为边缘检测最流⾏的算法之⼀。
3. Canny边缘检测算法的处理流程Canny边缘检测算法可以分为以下5个步骤:1) 使⽤⾼斯滤波器,以平滑图像,滤除噪声。
2) 计算图像中每个像素点的梯度强度和⽅向。
3) 应⽤⾮极⼤值(Non-Maximum Suppression)抑制,以消除边缘检测带来的杂散响应。
基于改进Canny算法的物体边缘检测算法
基于改进Canny算法的物体边缘检测算法物体边缘检测是计算机视觉中的一项重要任务,它在图像分析、物体识别和图像处理等领域具有广泛的应用。
Canny算法作为一种经典的边缘检测算法,被广泛应用于实际工作中。
然而,传统的Canny算法在处理一些复杂场景的边缘检测时存在一些问题,如边缘连接不准确、噪声敏感性较高等。
本文将介绍一种基于改进Canny算法的物体边缘检测算法,以解决传统Canny算法存在的问题。
1. 算法背景物体边缘检测是获取图像中物体边缘位置的过程,它对于图像中物体的形状和轮廓分析起着关键作用。
传统的Canny算法主要包括以下几个步骤:高斯平滑、计算梯度幅值和方向、非极大值抑制、双阈值处理和边缘连接。
然而,传统Canny算法对噪声比较敏感,而且在边缘连接过程中常常会出现断裂或连接错误的情况。
2. 改进的Canny算法为了改善传统Canny算法的缺点,我们提出了一种改进的Canny算法,具体步骤如下:2.1 高斯平滑首先对输入图像进行高斯平滑操作,以降低图像中的噪声。
我们采用一个合适大小的高斯卷积核对图像进行卷积操作,得到平滑后的图像。
2.2 计算梯度幅值和方向在平滑后的图像中,我们计算每个像素点的梯度幅值和方向。
可以使用Sobel、Prewitt等算子对图像进行梯度计算,得到梯度幅值和方向图像。
2.3 非极大值抑制在梯度幅值和方向图像中,我们进行非极大值抑制操作,以找到边缘的细化位置。
对于每个像素点,我们判断其梯度方向,并与相邻的两个像素进行比较,如果当前像素的梯度幅值最大,则保留,否则置零。
2.4 双阈值处理在进行非极大值抑制后,我们进行双阈值处理,以将真正的边缘从噪声中区分出来。
设置一个较高的阈值和一个较低的阈值,对梯度幅值进行判断,如果大于高阈值,则被认为是强边缘;如果处于低阈值和高阈值之间,则被认为是弱边缘;如果小于低阈值,则被认为是噪声。
2.5 边缘连接在双阈值处理后,我们进行边缘连接操作,以连接断裂的边缘线段。
基于sobel、canny的边缘检测实现参考模板

基于sobel 、canny 的边缘检测实现一.实验原理Sobel 的原理:索贝尔算子(Sobel operator )是图像处理中的算子之一,主要用作边缘检测。
在技术上,它是一离散性差分算子,用来运算图像亮度函数的梯度之近似值。
在图像的任何一点使用此算子,将会产生对应的梯度矢量或是其法矢量.该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。
如果以A 代表原始图像,Gx 及Gy 分别代表经横向及纵向边缘检测的图像,其公式如下:101202*101x G A -+⎛⎫ ⎪=-+ ⎪ ⎪-+⎝⎭121000*121y G A +++⎛⎫ ⎪= ⎪ ⎪---⎝⎭图像的每一个像素的横向及纵向梯度近似值可用以下的公式结合,来计算梯度的大小。
在以上例子中,如果以上的角度Θ等于零,即代表图像该处拥有纵向边缘,左方较右方暗。
在边沿检测中,常用的一种模板是Sobel 算子。
Sobel 算子有两个,一个是检测水平边沿的 ;另一个是检测垂直平边沿的 。
与 和 相比,Sobel 算子对于象素的位置的影响做了加权,因此效果更好。
Sobel 算子另一种形式是各向同性Sobel(Isotropic Sobel)算子,也有两个,一个是检测水平边沿的 ,另一个是检测垂直平边沿的 。
各向同性Sobel 算子和普通Sobel 算子相比,它的位置加权系数更为准确,在检测不同方向的边沿时梯度的幅度一致。
由于建筑物图像的特殊性,我们可以发现,处理该类型图像轮廓时,并不需要对梯度方向进行运算,所以程序并没有给出各向同性Sobel 算子的处理方法。
由于Sobel 算子是滤波算子的形式,用于提取边缘,可以利用快速卷积函数, 简单有效,因此应用广泛。
美中不足的是,Sobel 算子并没有将图像的主体与背景严格地区分开来,换言之就是Sobel 算子没有基于图像灰度进行处理,由于Sobel 算子没有严格地模拟人的视觉生理特征,所以提取的图像轮廓有时并不能令人满意。
OpenCV实现Canny边缘检测算法与一种基于类间方差最大的自适应阈值算法的研究

2
OpenCV 现有 Canny 函数检测结果与 Sobel、Laplace 结果比较
先用 OpenCV 现有 Canny、Sobel、Laplace 函数对同一图片进行了处理,对结果进行简要 分析。
上左为原图,上右为 Sobel 算子检测结果,下左为 Canny 算子检测结果,下右为 Laplace 算子检测结果
H1
(2)则图像 I (i, j ) :
1 1 1 1
H2
1 1 1 1
x 方向偏导数 P(i, j ) ( f (i, j) f (i, j 1) f (i 1, j) f (i 1, j 1)) 而 y 方向偏导数为: Q(i, j ) ( f (i 1, j) f (i, j) f (i 1, j 1) f (i, j 1)) 梯度幅值 M (i, j )
1
Canny 原理与算法简介
在数字图像处理边缘检测领域,有两大原则:一是尽量抑制噪声干扰;二是尽量精确地 检测出边缘。 而 Canny 边缘检测算子是 John F. Canny 于 1986 年开发出来的一个多级边缘检 测算法。Canny 的目标是找到一个最优的边缘检测算法,最优边缘检测的含义是: (1)最优检测:算法能够尽可能多地标识出图像中的实际边缘,漏检真实边缘的概率和 误检非边缘的概率都尽可能小; (2)最优定位准则:检测到的边缘点的位置距离实际边缘点的位置最近,或者是由于噪 声影响引起检测出的边缘偏离物体的真实边缘的程度最小; (3)检测点与边缘点一一对应:算子检测的边缘点与实际边缘点应该是一一对应。根据 这三个准则, Canny 推导出最优边缘检测算子的一个近似实现, 即边界点位于图像被高斯函
P(i, j )2 Q(i, j )2 ,梯度方向角 (i, j) arctan(Q(i, j) / P(i, j))
matlab练习程序(Canny边缘检测)

matlab练习程序(Canny边缘检测) 我可没直接调⽤系统函数,要是那样就太⽔了。
其实我的matlab代码很容易就能翻译成c/c++的。
canny边缘检测⼀共四个部分: 1.对原图像⾼斯平滑 2.对⾼斯平滑后的图像进⾏sobel边缘检测。
这⾥需要求横的和竖的还有联合的,所以⼀共三个需要sobel边缘检测图像。
3.对联合的sobel检测图像进⾏⾮极⼤抑制 4.连接边缘点并进⾏滞后阈值处理。
下⾯是代码:main.mclear all;close all;clc;img=imread('lena.jpg');imshow(img);[m n]=size(img);img=double(img);%%canny边缘检测的前两步相对不复杂,所以我就直接调⽤系统函数了%%⾼斯滤波w=fspecial('gaussian',[5 5]);img=imfilter(img,w,'replicate');figure;imshow(uint8(img))%%sobel边缘检测w=fspecial('sobel');img_w=imfilter(img,w,'replicate'); %求横边缘w=w';img_h=imfilter(img,w,'replicate'); %求竖边缘img=sqrt(img_w.^2+img_h.^2); %注意这⾥不是简单的求平均,⽽是平⽅和在开⽅。
我曾经好长⼀段时间都搞错了figure;imshow(uint8(img))%%下⾯是⾮极⼤抑制new_edge=zeros(m,n);for i=2:m-1for j=2:n-1Mx=img_w(i,j);My=img_h(i,j);if My~=0o=atan(Mx/My); %边缘的法线弧度elseif My==0 && Mx>0o=pi/2;elseo=-pi/2;end%Mx处⽤My和img进⾏插值adds=get_coords(o); %边缘像素法线⼀侧求得的两点坐标,插值需要M1=My*img(i+adds(2),j+adds(1))+(Mx-My)*img(i+adds(4),j+adds(3)); %插值后得到的像素,⽤此像素和当前像素⽐较adds=get_coords(o+pi); %边缘法线另⼀侧求得的两点坐标,插值需要M2=My*img(i+adds(2),j+adds(1))+(Mx-My)*img(i+adds(4),j+adds(3)); %另⼀侧插值得到的像素,同样和当前像素⽐较isbigger=(Mx*img(i,j)>M1)*(Mx*img(i,j)>=M2)+(Mx*img(i,j)<M1)*(Mx*img(i,j)<=M2); %如果当前点⽐两边点都⼤置1if isbiggernew_edge(i,j)=img(i,j);endendendfigure;imshow(uint8(new_edge))%%下⾯是滞后阈值处理up=120; %上阈值low=100; %下阈值set(0,'RecursionLimit',10000); %设置最⼤递归深度for i=1:mfor j=1:nif new_edge(i,j)>up &&new_edge(i,j)~=255 %判断上阈值new_edge(i,j)=255;new_edge=connect(new_edge,i,j,low);endendendfigure;imshow(new_edge==255)get_coords.mfunction re=get_coords(angle) %angle是边缘法线⾓度,返回法线前后两点 sigma=0.000000001;x1=ceil(cos(angle+pi/8)*sqrt(2)-0.5-sigma);y1=ceil(-sin(angle-pi/8)*sqrt(2)-0.5-sigma);x2=ceil(cos(angle-pi/8)*sqrt(2)-0.5-sigma);y2=ceil(-sin(angle-pi/8)*sqrt(2)-0.5-sigma);re=[x1 y1 x2 y2];endconnect.mfunction nedge=connect(nedge,y,x,low) %种⼦定位后的连通分析neighbour=[-1 -1;-1 0;-1 1;0 -1;0 1;1 -1;1 0;1 1]; %⼋连通搜寻[m n]=size(nedge);for k=1:8yy=y+neighbour(k,1);xx=x+neighbour(k,2);if yy>=1 &&yy<=m &&xx>=1 && xx<=nif nedge(yy,xx)>=low && nedge(yy,xx)~=255 %判断下阈值nedge(yy,xx)=255;nedge=connect(nedge,yy,xx,low);endendendend每步运⾏效果:原图⾼斯模糊后sobel边缘检测后⾮极⼤抑制后上阈值120,下阈值100检测结果。
基于canny算子的改进边缘检测算法
统 ,作 为 公司 、集 团层 面分 析 的 依 据 ,公 当一部分,来 自由于对计算机系统的不熟 业 信 息 化实 际 上也 是一 个 数据 库 建立 和 管
司 根 据 系统 中的业 务 资 料 ,作 为 主要 分 析
…
…
…
…
…
…
…
…
…
…
.
研发展. l
商 贸城 物 业管理 系统 的实施 与应 用
同济大学 北京 中软 融鑫计算机 系统工程有 限公 司 安喜 军
【 摘 要 】物业管理涉及的 范围较为广泛 ,管理 内容 繁杂 ,加上政 策性变动 因素 , 日常工作 中需要耗 费大量人力和物力 ,为 了提 高物业管理公 司的管理水平提 高工 作效率 ,必须对 物业管理 的各 项工作进行规 范化管理 ,如物业 资源管理规范化 、 收费规范化、工程设备检 修保养运行记录规 范化、保 洁绿化工作规范化等 ;通 过 规 范化操作对 员工工作进行指 导,提高员工工作 效率与技 能,并且 为减少人事变 动给公 司带来损失 与降低 新员工的培训成本 ;规 范化的手段多种多样 ,如 员工 工
的依 据 , 同时 每 月对 业 务 员做 量 化考 评 。
训 ,特 别 是基 础 知识 的培 训 ,对 解 决基 层
在企 业 内部通 过成 立信 息化 建设 项 目
通 过 管理 考 评 体系 配 合 管理 软 件在 基 层 的 心理 ,同 时提 高 基层 操 作 熟练 度 都有 很 大 组 ,明确 相 关工 作 的责 权 利 ,借助 外 界 的 实 施 取得 很 好 的效 果 ,有 效 的 提 高 出租 率 好 处 。 和 收 费数 据 分 析精 密 度 。强 调 将配 套 的 制 度 和 软件 有 机 结合 起 来 。一 方 面作 为 一套 2 . 物 业 管理 系 统 的实 施原 则 I T 管 理 咨询 公 司配合 ,结合 企 业实 际业 务
基于改进Canny算法的实时边缘检测系统设计与硬件实现
基于改进Canny算法的实时边缘检测系统设计与硬件实现赵安才;周强【摘要】针对传统Canny边缘检测算法中的边缘连接是通过设定固定阈值完成的,无法自动适应外界检测环境变化的问题,在FPGA上设计实现了一种基于改进Canny算法的实时边缘检测系统.该系统利用OSTU算法(最大类间方差法)自动选取合适的双阈值,能够对摄像头模块采集的视频图像进行实时处理,提取出每一帧图像的边缘,并在显示器上显示.实验结果表明,该系统能在在外界环境发生变化时,不需要做出调整,仍然能够很好的检测到图像的边缘.%In traditional Canny edge detection algorithm,the edge connection is completed by a fixed threshold,which cannot automatically adapt to changes in the external detection environment.So a realtime edge detection system based on improved Canny algorithm is designed and implemented on the FPGA,in which the OSTU algorithm (maximum interclass variance method) is used to automatically select the appropriate double threshold.The system can process the video images collected by the camera module in real-time,get the edge of every frame and then display it in monitor.The experiment result show that when the external environment changes,the system can still detect the edge of images very well without adjustment.【期刊名称】《电子设计工程》【年(卷),期】2018(026)007【总页数】5页(P189-193)【关键词】Canny;FPGA;OSTU;自适应【作者】赵安才;周强【作者单位】北京航空航天大学自动化科学与电气工程学院,北京100191;北京航空航天大学自动化科学与电气工程学院,北京100191【正文语种】中文【中图分类】TP391图像的边缘通俗讲是指图像中前景与背景之间的分割界线,这些分割界线是由一系列的像素点构成的,且其有一个共同点,即其领域内的颜色灰度存在阶跃变化。
Canny边缘检测基本原理
2 Canny边缘检测基本原理Canny边缘检测器是高斯函数的一阶导数,是对信噪比与定位之乘积的最优化逼近算子[1]。
Canny认为好的边缘检测具有3个特点:(1)低概率的错标非边缘点和低概率不标真实边缘点;(2)检测出来的边缘点应该尽可能的靠近真实边缘中心;(3)边缘响应是单值的。
设表示两维高斯函数,表示图像;Canny边缘检测算子为式中:是边缘曲线的法向量,由于事先不知道边缘的方向,所以取。
那么边缘点是方程的解,即然后通过双阈值去掉伪边缘,Canny算子检测到的是边缘点是高斯函数平滑后的图像拐点。
Canny算法的实现步骤:Step1:用高斯滤波器平滑图像,去除图像噪声。
一般选择方差为1.4的高斯函数模板和图像进行卷积运算。
Step2:用一阶偏导的有限差分来计算梯度的幅值和方向。
使用的梯度算子计算x和y方向的偏导数和,方向角,梯度幅值。
Step3:对梯度幅值应用非极大值抑制。
幅值M越大,其对应的图像梯度值也越大,但这还不足以确定边缘,因为这里仅把图像快速变化的问题转化成求幅值局部最大值问题,为确定边缘,必须细化幅值图像中的屋脊带,只保留幅值局部变化最大的点,生成细化的边缘。
Step4:用双阈值算法检测并且连接边缘。
双阈值法使Canny算子提取的边缘点更具有鲁棒性,高低阈值分别表示为Hth和Lth,对于高阈值Hth的选折,基于计算出的图像梯度值对应的直方图进行选取。
在一幅图像中,非边缘点数目在总图像像素点数目中占的比例表示为Hratio,根据图像梯度值对应的直方图累加,累加数目达到总像素数目的Hratio时,对应的图像梯度值设置为Hth,在文中设定Hratio为0.7。
低阈值Lth的选择通过Lth=Lratio*Hth得到,文中Lratio设定为0.4。
最后通过对边缘点的标记和领域关系进行连接得到最后的边缘检测图。
3亚像素级Zernike矩算子精确定位边缘Zernike矩算子的基本思想是通过计算每个像素点的4个参数来判断该点是否为边缘点。
基于改进Canny算法的服装图像边缘检测

基于改进Canny算法的服装图像边缘检测罗敏;刘洞波;陈鑫海;王宁【摘要】针对传统Canny算法在噪声去除与高低阈值选取方面存在的问题,提出一种改进的Canny算法应用于服装图像边缘检测上,首先使用改进中值滤波取代高斯滤波进行服装图像去噪,然后采取在像素八邻域内计算梯度幅值的方法计算梯度的幅值和方向并获取非极值抑制后的图像数据阵列,最后利用Otsu算法计算高低阈值并连接边缘.实验结果表明,改进算法能够有效的抑制噪声并检测出较完整清晰的服装边缘.【期刊名称】《湖南工程学院学报(自然科学版)》【年(卷),期】2018(028)003【总页数】6页(P39-44)【关键词】服装图像边缘检测;改进Canny;改进中值滤波;Otsu【作者】罗敏;刘洞波;陈鑫海;王宁【作者单位】湖南工程学院计算机与通信学院,湘潭411104;湖南工程学院计算机与通信学院,湘潭411104;湖南工程学院计算机与通信学院,湘潭411104;湖南工程学院计算机与通信学院,湘潭411104【正文语种】中文【中图分类】TP3910 引言随着互联网时代的高速发展,网络购物成为一种常见的购物方式,人们对于服装的需求日益增长.图像处理与边缘检测技术在服装电子商务领域中起着很大的作用,因此从服装图像中提取出有效的服装信息变得尤其重要.提出一种检测效果较好的服装图像边缘检测方法是本文研究的核心.图像边缘[1,2]是重要的图像特征.在一幅数字图像中,边缘包含了大量的信息,因此,边缘检测一直是图像处理与模式识别领域中的研究热点.边缘是指图像区域属性发生突变的地方,但检测时由于噪声、光照强度等多种因素的干扰,很容易形成虚假边缘与不完整边缘的情形.由于边缘特征是服装图像的重要部分,因此对服装图像边缘特征的分割与提取意义重大.传统的边缘检测算法如:Sobel算法、Prewitt算法、Roberts算法、Krisch算法和Laplacian算法等,这些算法容易实现、实时性强,但由于其极易受到噪声影响,检测结果易出现虚假边缘或边缘不完整等不理想的效果.近年来,出现了很多改进的边缘检测方法,如小波变换法、曲面拟合法等等.尽管如此,由于Canny算法[3]具有较好的信噪比与检测精度,依然是主要的边缘检测方法.Canny提出边缘检测算法应满足信噪比准则、定位精度准则与单边缘响应准则,由此推导出Canny算法,并在边缘检测上取得了很好的效果.近年来,广大学者提出了很多基于Canny算法的改进算法[4-5].由于光照强度、噪声、图像色彩差异和模糊的边缘等因素的影响,如果盲目的使用传统Canny算法进行边缘检测,不仅无法减少噪声等其他因素的干扰,而且很难设定Canny算法中的高低阈值,容易检测出虚假边缘和边缘缺失的结果.为此,提出一种基于传统Canny思想的改进边缘检测算法,对服装图像的边缘特征进行检测与提取,其使用改进中值滤波平滑图像,通过改进的梯度幅值计算方法计算梯度幅值,并采用Otsu算法自适应确定高低阈值,实现自适应的服装边缘检测,实验结果表明该算法能够有效的抑制噪声并检测出较完整清晰的服装边缘.1 传统Canny边缘检测算法1.1 平滑图像Canny算法用二维高斯函数的一阶导数处理图像来降低噪声影响,二维高斯函数为:(1)经过平滑处理后的图像为:I(x,y)=G(x,y)*f(x,y)(2)其中,f(x,y)为原图像函数,I(x,y)为平滑处理后的图像函数,G(x,y)为高斯滤波器,“*”表示卷积运算,标准差σ的大小决定图像的平滑程度,需要人为根据实际情况选取σ值.1.2 计算梯度的幅值和方向Canny算法采用2×2邻域求有限差分均值来计算平滑后的图像函数I(x,y)的梯度幅值和梯度方向,其中,x和y方向偏导数Px[i,j]和Py[i,j]分别为:Px[i,j]=(3)Py[i,j]=(4)计算梯度幅值为:(5)梯度方向为:θ[i,j]=arctan(Py[i,j]/Px[i,j])(6)1.3 对梯度幅值进行非极大值抑制为细化幅值图像中的屋脊带,保留像素点幅值局部变化最剧烈的像素点,Canny 算法使用在3×3范围内,共八个方向的邻域信息对梯度幅值函数A[i,j]的全部像素顺梯度方向进行梯度幅值的插值.如果梯度方向上的两个像素点的梯度幅值大于邻域中心点的梯度幅值a[i,j],则将该像素点标记为非边缘点;否则,将该像素点标记为可能的边缘点,最终得到图像N[i,j].1.4 双阈值算法检测和连接边缘Canny算法使用高阈值rh和低阈值rl,如果像素点的梯度幅值比高阈值rh大,则该点被认定是边缘点;如果像素点的梯度幅值比低阈值rl小,则该点被认定不是边缘点;如果像素点的梯度幅值处于高低阈值之内,则该点可能是边缘点,需要进一步处理;用双阈值对处理后的图像N[i,j]分割得到图像Mh[i,j]和Ml[i,j].由于图像Mh[i,j]为高阈值rh分割得到的图像,因此边缘轮廓可能不完整,双阈值算法需要在Mh[i,j]中将不完整边缘连接成轮廓.当到达轮廓端点时,在图像Ml[i,j]对应像素点的八邻域位置寻找可以连接到轮廓上的边缘点,不断跟踪Ml[i,j]并搜集边缘,将图像Mh[i,j]中的不完整的边缘轮廓部分连接起来[6].1.5 Canny算法的缺陷(1)传统Canny算法使用高斯函数平滑图像来达到去噪的目的,图像的平滑程度取决于高斯函数标准差σ值的大小,但σ值需要人为确定,σ值越大,平滑作用越好,但同时会丢失一部分真实边缘;σ值越小,边缘定位精度越高,但会因为平滑程度低而导致过多的虚假边缘.因此高斯滤波器很难在平滑图像与保留边缘细节上取得较好的平衡.(2)传统Canny算法使用在2×2邻域内求有限差分来计算梯度幅值的算法,虽然边缘定位精确,但很容易受到噪声的影响,导致检测结果出现虚假边缘或丢失真实边缘的细节部分,实际效果不理想.(3)传统Canny算法使用的双阈值检测和连接边缘的算法,使用人为给定的高、低阈值进行图像分割,而不是基于图像的边缘信息自适应确定阈值[7-9].不仅受噪声干扰大,而且当高阈值设置过高时,会丢失重要的真实边缘;当低阈值设置过低时,会获得过多的虚假边缘,使结果受到影响.本文提出的改进Canny算法针对传统Canny算法的三个缺陷进行改进,并运用该算法对服装图像的边缘特征进行检测,取得了较好的检测结果.2 改进Canny算法2.1 改进中值滤波去噪针对传统Canny在平滑图像时需要人为设定高斯函数标准差σ值的缺陷,本文提出使用改进中值滤波(Improved Median Filter)取代高斯滤波,IMF能够很好的抑制噪声并保护图像的边缘信息.中值滤波器[10-11]是经典的滤除噪声的非线性平滑滤波方法,对噪声有很好的抑制作用,在滤波的同时保护图像的边缘信息,使之不被模糊.而线性滤波方法则不具备这些优点.1)一维中值滤波原理中值滤波的基本思想为:选择一个像素的模板窗口W,窗口内的各像素按照灰度值的大小排序后用窗口中间的灰度值代替原f(x,y)的灰度值成为窗口中心的灰度值G(x,y).即:G(x,y)=Med{f(x-k,y-l),(k,l∈W)}(7)其中:W为选定的窗口的尺寸,f(x-k,y-l)为窗口W像素的灰度值.窗口W内的像素数为奇数时,中值取为中间像素值;若窗口内的像素数为偶数时,中值取为窗口中间两像素值的平均值.如式(8)所示:M=Med{f1,f2,…,fn}=(8)中值滤波的滤波步骤为:(1)将滤波模板移动到图像函数中的某个像素位置并读取周围对应滤波模板窗口的像素的灰度值.(2)将模板对应的像素灰度值按从小到大的顺序进行排序.(3)将该像素的灰度值更改为模板中间像素的灰度值.2)二维中值滤波原理二维中值滤波可以用式(9)来表示:(9)其中:W为滤波模板,{f(i,j)}为二维数据函数.模板的形状与大小会极大程度的影响二维中值滤波的效果.需要根据实际情况采取不同的模板形状和大小.3)改进中值滤波原理IMF在二维中值滤波的思想上进行改进,对模板窗口的像素中心I(i,j)的3×3邻域信息进行处理,如果像素点I(i,j)是噪声点,则将邻域像素点的中值Imed赋值给I(i,j);否则,I(i,j)保持不变,具体内容如公式(10)所示:I(i,j)=(10)其中,Imax为模板窗口像素的最大值,Imin为模板窗口像素的最小值,对I(i,j)像素点的灰度值的大小进行判断并作出相应处理,达到平滑图像的效果.2.2 改进的梯度幅值计算方法为了减小传统Canny算法在梯度幅值计算上的误差,在传统的梯度幅值计算方法的基础上,提出在像素八领域内,通过计算x方向、y方向、45°方向与135°方向一阶偏导的有限差分来计算梯度幅值的方法,该方法能够精准的定位边缘并有效的抑制噪声,取得了较好的实际效果.具体内容如下:x方向偏导数:Px[i,j]=I[i+1,j]-I[i-1,j](11)y方向偏导数:Py[i,j]=I[i,j+1]-I[i,j-1](12)45°方向偏导数:p45°[i,j]=I[i-1,j+1]-I[i+1,j-1](13)135°方向偏导数:p135°[i,j]=I[i+1,j+1]-I[i-1,j-1](14)计算梯度幅值为:A[i,j]=(15)梯度方向为:θ[i,j]=arctan(Py[i,j]/Px[i,j])(16)2.3 自适应双阈值分割为了弥补传统Canny算法在高低阈值上需要人为选取的缺陷,提出使用最大类间方差法(Otsu算法[12-13])自适应选取高低阈值.单阈值Otsu算法基本原理为:设f(i,j)为N[i,j]图像在点(i,j)处的灰度值,图像尺寸为M×N,灰度级为m,则f(i,j)∈[0,m-1].归一化直方图中的分量Pk即为k灰度值在图像数据阵列中出现的概率.(17)前景与背景图像的分割是基于阈值t与图像的灰度信息,前景图像为图像中灰度值大于t的部分,背景图像为图像中灰度值小于t的部分,则前景部分所占比例为:(18)前景部分点数为:N0=MN×ω0(t)(19)前景均值为:(20)则背景部分所占比例为:(21)背景部分点数:N1=MN×ω1(t)(22)背景均值为:(23)总均值为:(24)因此,可以得出阈值计算公式见式(25):(25)其含义为:在[0,m-1]区间上选择能使图像背景与前景之间的类间方差达到最大的阈值t.单阈值Otsu算法能够对不同的图像直方图选择容错率最低的阈值,得到较满意的结果.双阈值Otsu算法基本原理为:将非极值抑制后的图像N[i,j]分为H0、H1、H2三部分,梯度幅值分为l级.N为图像的总像素,梯度幅值为i的像素数目为ni,占整幅图像比例Pi为:(26)定义P(k)、P(k,m)、P(m)为:(27)令H0包含幅值[0,…,k]级的像素,表示图像的非边缘像素部分,H1包含幅值[k+1,…,m]级的像素,表示图像的可能的边缘像素部分,H2包含幅值[m+1,…,l-1]级的像素,表示图像的边缘点像素部分.设μG为图像的总梯度幅值均值,对应H0、H1、H2的梯度幅值均值为:(28)(29)则类间方差为:σ2(k,m)=·P(k)+·P(k,m)+·P(m)(30)定义两个高低最佳阈值为:kh和ml,即使σ2(k,m)最大的值.如式(31)所示:(31)使σ2(k,m)达到最大时的kh、ml分别为H0、H1、H2区间像素的分界点,即为Canny算法的低阈值和高阈值.2.4 本文算法检测服装图像边缘的步骤(1)读取待检测图像.(2)使用改进中值滤波平滑图像.(3)使用改进的梯度幅值计算方法计算梯度幅值.(4)获取对梯度幅值进行非极值抑制后的图像数据阵列.(5)自适应双阈值求取高低阈值.(6)检测并连接图像边缘.3 实验结果与分析实验在windows10系统下使用matlabR2016a编程实现.为了检验本文算法对服装图像进行边缘检测的效果,进行了大量的实验,对边缘信息丰富程度不同的服装图像,分别用传统Canny算法和改进Canny算法进行边缘检测,并与传统Canny算法检测结果进行比较,几种服装图像实验结果如下:服装一为唐老鸭图案的黑色服装图像,对它进行边缘检测的结果如图1所示.服装二为蛇形图案的白色服装重影图像,对它进行边缘检测的结果如图2所示.服装三为线条图案的黑色服装图像,对它进行边缘检测的结果如图3所示.图(a)是原始图像;图(b)是采用传统Canny算法的边缘检测结果;图(c)是采用本文改进Canny算法的边缘检测结果.从图1可以看出,图1(b)中检测出了过多的虚假边缘,检测效果不理想.相比之下,图1(c)的边缘清晰,虚假边缘少.从图2可以看出,在图2(b)中,噪声与衣服重影严重影响了边缘检测结果,出现了过多的虚假边缘,检测效果不理想.相比之下,图2(c)基本不受噪声与衣服重影干扰,虽然丢失了衣领部分的真实边缘,但是并未丢失主要的边缘信息,检测效果更理想.图1 服装一边缘检测效果图图2 服装二边缘检测效果图图3 服装三边缘检测效果图从图3可以看出,图3(b)中衣服的褶皱导致检测结果出现了大量的虚假边缘,严重制约了图像检测质量.图3(c)基本不受衣服的褶皱干扰,检测出了清晰的边缘图像,虽然未检测出衣领,但总体来说效果好于传统Canny算法.4 结语针对传统Canny算法在服装图像边缘检测上存在的缺陷,本文对Canny算法的滤波、梯度的幅值计算方法以及双阈值的确定进行改进,利用改进的中值滤波替代传统Canny算法中的高斯滤波,使用改进的Canny的梯度幅值计算方法计算梯度幅值,并使用Otsu算法自适应确定高低阈值.实验结果表明,相比于传统的Canny 算法,本文的改进算法在滤除噪声、边缘清晰度以及边缘获取方面更良好,检测出了较清晰、完整的服装图像边缘.参考文献【相关文献】[1] 厉丹, 钱建生, 芦楠楠, 等. 图像边缘检测技术的改进[J]. 计算机工程与应用,2010,46 (18): 164-166.[2] 罗敏,刘洞波,王宁,等.改进核模糊C均值聚美算法在服装图像分割中的研究[J].湖南工程学院学报,2018,28(2):40-43.[3] Canny J. A Computational Approach to Edge Detection[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 1986, PAMI-8(6):679-698.[4] 余洪山, 王耀南. 一种改进型Canny边缘检测算法[J]. 计算机工程与应用, 2004, 40(20):27-29.[5] 吉玲,杨亚,付珊珊,等. 一种改进的Canny边缘检测算法[J]. 微处理机, 2015(1):40-43.[6] Di H, Gao D. Gray-level Transformation and Canny Edge Detection for 3D Seismic Discontinuity Enhancement[J]. Computers & Geosciences, 2014(72):192-200.[7] 雒涛, 郑喜凤, 丁铁夫. 改进的自适应阈值Canny边缘检测[J]. 光电工程, 2009, 36(11):106-111.[8] Jie G, Ning L. An Improved Adaptive Threshold Canny Edge Detection Algorithm[C]. International Conference on Computer Science and Electronics Engineering. IEEE,2012:164-168.[9] Onn U, Singla P. A Survey on Conventional Edge Detection Techniques[J]. Journal of Algebra, 2014:1-17.[10] 许宏科, 秦严严, 陈会茹. 一种基于改进Canny的边缘检测算法[J]. 红外技术, 2014, 36(3):210-214.[11] WU. Wavelet Domain Denoising Method Based on Multistage Median Filtering[J]. Journal of China Universities of Posts & Telecommunications, 2013, 20(2):113-119. [12] 吴一全, 潘喆. 2维最大类间平均离差阈值选取快速递推算法[J]. 中国图象图形学报, 2009,14(3):471-476.[13] Yuan X C, Wu L S, Peng Q. An Improved Otsu Method Using the Weighted Object Variance for Defect Detection[J]. Applied Surface Science, 2015, 349:472-484.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
double nSigma = 0.4; //定义高斯函数的标准差 int nWidowSize = 1+2*ceil(3*nSigma); //定义滤波窗口的大小 int nCenter = (nWidowSize)/2; //定义滤波窗口中心的索引
25.cvWaitKey(0);
26.cvDestroyWindow("GrayImage");
1.2 图像的高斯滤波
根据上面所讲的边缘检测过程,下一个步骤就是对图像进行高斯滤波。可根据之前博文描述的方法获取一维或者二维的高斯滤波核。因此进行图像高斯滤波可有两种实现方式,以下具体进行介绍。
16. dSum_1 += pdKernal_1[i];
17.}
18.for(i=0; i<nWidowSize; i++)
19.{
20. pdKernal_1[i] /= dSum_1; //进行归一化
21.}
12.{
13. for(intx=0; x<ColorImage->width; x++)
14. {
15. data1 = (BYTE)ColorImage->imageData[j*ColorImage->widthStep + i*3]; //B分量
18. ptr[j*ColorImage->width+x]=(BYTE)(0.072169*data1 + 0.715160*data2 + 0.212671*data3);
19. }
20.} ห้องสมุดไป่ตู้
21.OpenCvGrayImage=cvCreateImageHeader(cvGetSize(ColorImage), ColorImage->depth, 1);
1.2.1 根据一维高斯核进行两次滤波
1)生成一维高斯滤波系数
[cpp] view plaincopyprint?
1.//////////////////////生成一维高斯滤波系数/////////////////////////////
2.double* pdKernal_1 = new double[nWidowSize]; //定义一维高斯核数组
两种方法都需要用到的变量:
[cpp] view plaincopyprint?
1.int nWidth = OpenCvGrayImage->width; //获取图像的像素宽度
2.int nHeight = OpenCvGrayImage->height; //获取图像的像素高度
3.unsigned char* ptr; //指向图像的数据首地址
4.if (ColorImage == NULL)
5. return;
6.int i = ColorImage->width * ColorImage->height;
12.for(int i=0; i<nWidowSize; i++)
13.{
14. double nDis = (double)(i-nCenter);
15. pdKernal_1[i] = exp(-(0.5)*nDis*nDis/(nSigma*nSigma))/(sqrt(2*3.14159)*nSigma);
1 Canny算法的实现流程
1.1 图像读取和灰度化
编程时采用上文所描述的第二种方法来实现图像的灰度化。其中ptr数组中保存的灰度化后的图像数据。具体的灰度化后的效果如图3所示。
[cpp] view plaincopyprint?
5.double* nData = new double[nWidth*nHeight]; //两次平滑的中间数据
6.for(int j=0; j<nHeight; j++) //获取数据
8.//// ------------ e /////////////////
9.//// /////////////////
3.double dSum_1 = 0.0; //求和,用于进行归一化
4.////////////////////////一维高斯函数公式//////////////////////////////
5.//// x*x /////////////////
6.//// -1*---------------- /////////////////
7.//// 1 2*Sigma*Sigma /////////////////
int nWidth = OpenCvGrayImage->width; //获取图像的像素宽度 int nHeight = OpenCvGrayImage->height; //获取图像的像素高度 unsigned char* nImageData = new unsigned char[nWidth*nHeight]; //暂时保存图像中的数据 unsigned char*pCanny = new unsigned char[nWidth*nHeight]; //为平滑后的图像数据分配内存 double* nData = new double[nWidth*nHeight]; //两次平滑的中间数据 for(int j=0; j<nHeight; j++) //获取数据 { for(i=0; i<nWidth; i++) nImageData[j*nWidth+i] = (unsigned char)OpenCvGrayImage->imageData[j*nWidth+i]; }
10.//// \/2*pi*Sigma /////////////////
11.//////////////////////////////////////////////////////////////////////
22.cvSetData(GrayImage,ptr, GrayImage->widthStep); //根据数据生成灰度图
23.cvNamedWindow("GrayImage",CV_WINDOW_AUTOSIZE);
24.cvShowImage("GrayImage",OpenCvGrayImage); //显示灰度图
16. data2 = (BYTE)ColorImage->imageData[j*ColorImage->widthStep + i*3 + 1]; //G分量
17. data3 = (BYTE)ColorImage->imageData[j*ColorImage->widthStep + i*3 + 2]; //R分量
首先定义该部分的通用变量:
[cpp] view plaincopyprint?
1.double nSigma = 0.4; //定义高斯函数的标准差
2.int nWidowSize = 1+2*ceil(3*nSigma); //定义滤波窗口的大小
//////////////////////生成一维高斯滤波系数///////////////////////////// double* pdKernal_1 = new double[nWidowSize]; //定义一维高斯核数组 double dSum_1 = 0.0; //求和,用于进行归一化 ////////////////////////一维高斯函数公式////////////////////////////// //// x*x ///////////////// //// -1*---------------- ///////////////// //// 1 2*Sigma*Sigma ///////////////// //// ------------ e ///////////////// //// ///////////////// //// \/2*pi*Sigma ///////////////// ////////////////////////////////////////////////////////////////////// for(int i=0; i<nWidowSize; i++) { double n
1.IplImage* ColorImage = cvLoadImage( "12.jpg", -1 ); //读入图像,获取彩图指针
2.IplImage* OpenCvGrayImage; //定义变换后的灰度图指针
7.BYTE data1; //中间过程变量
8.BYTE data2;
9.BYTE data3;
10.ptr = new unsigned char[i];
11.for(intj=0; j<ColorImage->height; j++) //对RGB加权平均,权值参考OpenCV
3.unsigned char* nImageData = new unsigned char[nWidth*nHeight]; //暂时保存图像中的数据