弯曲变形 PPT课件
合集下载
第十二章弯曲变形
C右
讨论:挠曲线分段
(1)凡弯矩方程分段处,应作为分段点;
(2)凡截面有变化处,或材料有变化处,应作为分段点;
(3)中间铰视为两个梁段间的联系,此种联系体现为两 部分之间的相互作用力,故应作为分段点;
A
C
M B
a
L
讨论:挠曲线分段
(4)凡分段点处应列出连续条件;
根据梁的变形的连续性,对同一截面只可能有唯一确 定的挠度和转角;
wC3
3ql4 48EI
B3
(q2l)l 3EI
q3l , 3EI
q
C1
ql
C2
C3
B1
B2
ql2
B3
3、变形叠加
BB1B2B3
ql 3 24 EI
ql 3 16 EI
ql 3
3 EI
11 ql 3
48 EI
CC 1C2C3 5ql4 (ql )l 3 3 ql 4 11 ql 4
ω M
M0
d 2
dx 2
0
M x
M0
ω
d 2 dx 2
0
M
Mx
挠曲线为凹曲线
挠曲线为凸曲线
弯矩M与二阶导数 y 符号一致。
'' M (x)
EI z
挠曲线近似微分方程
适用范围: 线弹性、小变形; y轴向上,x轴向右;
§12.3 用积分法求弯曲变形
挠曲线的近似微分方程 积分一次:
车间桁吊大梁的变形
案例3: 车间桁吊大梁的过大变形
会使梁上小车行走困难,造成爬坡现象; 还会引起较严重的振动;
案例4: 桥梁如果产生过大变形
材料力学-弯曲变形

(向下)
qB
qmax
w(l)
Pl 2 2EI
(顺时针)
例题2
图示的等截面简支梁长为l,抗弯刚度为
EI,在右端受有集中力偶M0的作用,求梁任
一截面的转角和挠度。
y
解:
由整体平衡得 FAx=0, FAy= FBy= M0/l 从而,截面的弯矩为
M(x)= xFAy= xM0/l
FAx A x o
FAy
横截面变形:
线位移:长度变化
水平方向—小变形假定,挠曲轴平坦,忽略不计 垂直方向—挠度 w= w(x)
转角:角度变化
横截面相对于原位置转过的夹角,
一般用q (x)表示截面转角,并且以逆时针为正
q'
对于细长梁,略去剪力对变形影响 平截面假设成立: 变形的横截面与挠曲轴垂直
q q tan q dw
(l 2
a2)
y
例题3
P x
A
C
于是,梁的挠曲线方程为 FAx
l
w
w1 w2
(x) (x)
0 xa a xb
FAy
a
b
Pb
6 EIl
Pa
6 EIl
x3 (b2 l2 )x (l x)3 (a2 l2
)(l
x)
0 xa a xl
转角方程为
q w ww12((xx))
0 xa a xb
Pb 2EIl
x2
C1
ቤተ መጻሕፍቲ ባይዱdx
Pb 6EIl
x3
C1x
D1
同理,对CB段
w2
w2dx C2
Pa EIl
(l
x)dx
C2
材料力学第5章弯曲变形ppt课件
qL
4.22kNm
4.22kNm
M
max
32 M
max
76.4MPa
WZ
d 3
例题
20kN m
A
4m
FA
20kN m
A
MA
4m
试求图示梁的支反力
40kN
B
D
2m
2m
B
B1 FB
FB 40kN
B
D
B2
2m
2m
在小变形条件下,B点轴向力较小可忽略不
计,所以为一次超静定.
C
B1 B2
FBBBMF12AA2383qFEqELBqqLI84LI2LLZZ32F35BFF4FEFB83PBPLIEL7Z3L12IZ.218352.k75N5kFkN2PNmEL2IZ2
x
边界条件
A
L2
B
L2
C
y
连续条件
例题 5.5
用积分法求图示各梁挠曲线方程时,试问下列各梁 的挠曲线近似微分方程应分几段;将分别出现几个积 分常数,并写出其确定积分常数的边界条件
全梁仅一个挠曲线方程
C
q
EA
共有两个积分常数 边界条件
L1
A
x
B
EI Z
L
y
例题 5.5
用积分法求图示各梁挠曲线方程时,试问在列各梁 的挠曲线近似微分方程时应分几段;将分别出现几个 积分常数,并写出其确定积分常数的边界条件
q
a
B C LBC
B
2a
FN
B
q2a4
8EIZ
FN 2a3
3EIZ
C
FN
a
D
《平面弯曲变形》PPT课件
A截面挠度
求图示外伸梁的A截面挠 度和B截面转角。
B截面转角
B3M EIlF 3E paIl
fAw A 1B a
fA
Fpl3 3EI
Fpal a 3EI
24
目录
讨论 叠加法求变形有什么优缺点?
25
目录
10.7.4 梁的刚度校核
刚度条件
fw [f], []
max
max
建筑钢梁的许可挠度:
ll ~
3E
d4 Fla180
64
3E
6F 4 l1 a806 42 013021180
d4 3E 4 3201 69020.5
1111 0 3m 111mm
28
目录
10.8 用变形比较法解简单超静定梁
1.基本概念:
超静定梁:支反力数目大于有效平衡方程数目的梁 多余约束:从维持平衡角度而言,多余的约束 超静定次数:多余约束或多余支反力的数目。 相当系统:用多余约束力代替多余约束的静定系统
2.求解方法:
解除多余约束,建立相当系统——比较变形,列变 形协调条件——由物理关系建立补充方程——利用 静力平衡条件求其他约束反力。
29
目录
7-6
MA A MA A
FAy FAy
A A
A A
MA AA
MA A A
用变形比较法解简单超静定梁 F
B FC
B
C
2a
a
例6 求梁的支反力,梁的抗弯 刚度为EI。
载荷作用的情形,计算各自C截 面的挠度和转角。
ql4
wC1
, 8EI
C1
ql3 6EI
wC1
wC2 wB2 B22l
C2
求图示外伸梁的A截面挠 度和B截面转角。
B截面转角
B3M EIlF 3E paIl
fAw A 1B a
fA
Fpl3 3EI
Fpal a 3EI
24
目录
讨论 叠加法求变形有什么优缺点?
25
目录
10.7.4 梁的刚度校核
刚度条件
fw [f], []
max
max
建筑钢梁的许可挠度:
ll ~
3E
d4 Fla180
64
3E
6F 4 l1 a806 42 013021180
d4 3E 4 3201 69020.5
1111 0 3m 111mm
28
目录
10.8 用变形比较法解简单超静定梁
1.基本概念:
超静定梁:支反力数目大于有效平衡方程数目的梁 多余约束:从维持平衡角度而言,多余的约束 超静定次数:多余约束或多余支反力的数目。 相当系统:用多余约束力代替多余约束的静定系统
2.求解方法:
解除多余约束,建立相当系统——比较变形,列变 形协调条件——由物理关系建立补充方程——利用 静力平衡条件求其他约束反力。
29
目录
7-6
MA A MA A
FAy FAy
A A
A A
MA AA
MA A A
用变形比较法解简单超静定梁 F
B FC
B
C
2a
a
例6 求梁的支反力,梁的抗弯 刚度为EI。
载荷作用的情形,计算各自C截 面的挠度和转角。
ql4
wC1
, 8EI
C1
ql3 6EI
wC1
wC2 wB2 B22l
C2
《弯曲变形静不定梁》课件

THANK YOU
。
适用范围
适用于分析简单梁结构,计 算过程相对简单,但精度略 低于弹性力学方法和有限元 方法。
04
静不定梁的应用
工程结构
桥梁
静不定梁在桥梁设计中应用广泛 ,如斜拉桥、悬索桥等,能够承 受较大的弯曲和剪切力,提高桥 梁的稳定性和安全性。
建筑
在高层建筑、大跨度结构等建筑 设计中,静不定梁能够提供更好 的支撑和稳定性,保证建筑的安 全性和耐久性。
解法
通过求解弹性力学基本方程,可以得到梁的位 移、应变和应力等参数。
适用范围
适用于分析梁的精确解,但计算过程较为复杂。
有限元方法
基本思想
01
将连续的梁离散为有限个小的单元,对每个单元进行受力分析
,再通过单元的集合体来近似表示整个梁。
求解过程
02
通过迭代或直接求解方法,得到每个单元的位移和应力,再通
大跨度结构
大跨度结构如体育场馆、会展中心等需要承受较大的荷载和 变形,静不定梁能够提供更好的承载和支撑,保证大跨度结 构的稳定性和安全性。
05
静不定梁的优化设计
材料选择
钢材
高强度钢材具有较高的承载能力和耐久性,适用于需要承受较大 载荷的静不定梁。
铝合金
铝合金具有轻质、耐腐蚀的优点,适用于需要减轻自重的静不定梁 。
01
03
为了减小扭转变形的影响,可以通过增加梁的截面尺 寸、提高材料的剪切模量或改变截面形状等方式来实
现。
04
在静不定梁中,扭转变形的影响通常较小,但在某些 情况下,如梁的长度较大或受到较大的力矩作用时, 其影响可能会变得较为显著。
03
静不定梁的分析方法
弹性力学方法
《弯曲变形》课件2

航空航天器中的弯曲变形控制
总结词
航空航天器中,弯曲变形控制对于确保 飞行器的气动性能和结构稳定性至关重 要。
VS
详细描述
在航空航天领域,弯曲变形控制涉及到飞 机和航天器的整体和局部结构的刚度和稳 定性要求。为了减小弯曲变形,需要采取 一系列的设计和控制措施,如优化结构设 计、加强材料和制造工艺的控制等。这有 助于提高飞行器的性能和安全性。
感谢观看
THANKS
弯曲变形的定义
01
02
03
弯曲变形
物体在受到外力作用时, 其形状发生改变的现象。
弯曲变形的程度
与外力的大小、物体的材 料性质和受力方式等因素 有关。
弯曲变形的特点
物体在受力后发生弯曲, 但内部结构并未发生破坏 或永久性变形。
弯曲变形的应用场景
桥梁工程
桥梁在车辆和风载等外力作用下会发 生弯曲变形,但设计合理的桥梁结构 能够保证安全性和稳定性。
几何方程
描述了物体形状的变化和 应变之间的关系。
弯曲变形的能量平衡方程
应变能
物体因弯曲变形而储存的能量, 与应力和应变有关。
外力势能
物体受到的外力与位移有关,可以 转化为势能。
能量平衡方程
描述了物体在弯曲变形过程中能量 的变化和平衡。
弯曲变形的有限元分析
有限元模型
将物体划分为有限个小的单元 ,每个单元有一定的属性和行
分析
对实验结果进行统计分析,研究弯曲变形的规律和特点。通过对比不同材料和规 格的试样,分析其抗弯性能和影响因素。结合理论分析,探讨弯曲变形的本质和 机理。
06
弯曲变形的实际应用案例
桥梁工程中的弯曲变形控制
总结词
桥梁工程中,弯曲变形控制是确保结构安全和稳定的关键因素。
《材料力学弯曲》课件

定义方式
弯曲应变通常用曲率半径的变化量与原始曲率半径的比值来表示,即 ΔR/R。其中 ΔR 是曲率半径的变化量,R 是原始曲率半径。
弯曲应变的计算
应变计法
通过在物体上粘贴应变片 ,并利用应变计测量应变 值,从而计算出弯曲应变 。
有限元分析法
利用有限元分析软件,建 立物体的有限元模型,通 过模拟受力情况下的变形 过程,计算出弯曲应变。
实验法
通过实验测试物体的弯曲 变形,利用相关公式计算 出弯曲应变。
弯曲应变的分布
应变分布图
通过绘制应变分布图,可以直观地了 解物体在弯曲变形过程中应变的大小 和分布情况。
应变集中
应变梯度
在弯曲变形过程中,物体不同部位上 的应变大小和方向可能不同,形成应 变梯度。
在物体受力点附近区域,应变会集中 增大,可能导致材料疲劳或断裂。
材料力学的重要性
总结词
材料力学在工程设计和实践中具有重要意义。
详细描述
在工程设计和实践中,材料力学是必不可少的学科之一。通过对材料力学的研究 ,工程师可以更好地理解材料的性能,预测其在各种工况下的行为,从而设计出 更加安全、可靠、经济的工程结构。
材料力学的基本假设
总结词
材料力学基于一系列基本假设,这些假设简 化了问题的复杂性,使得分析更为简便。
学习目标
01
02
03
04
掌握材料力学的基本概念、原 理和分析方法。
理解弯曲问题的特点和解决方 法。
能够运用所学知识解决简单的 弯曲问题。
培养分析问题和解决问题的能 力,提高力学素养。
02
材料力学基础
材料力学的定义
总结词
材料力学是一门研究材料在各种 力和力矩作用下的行为的学科。
弯曲应变通常用曲率半径的变化量与原始曲率半径的比值来表示,即 ΔR/R。其中 ΔR 是曲率半径的变化量,R 是原始曲率半径。
弯曲应变的计算
应变计法
通过在物体上粘贴应变片 ,并利用应变计测量应变 值,从而计算出弯曲应变 。
有限元分析法
利用有限元分析软件,建 立物体的有限元模型,通 过模拟受力情况下的变形 过程,计算出弯曲应变。
实验法
通过实验测试物体的弯曲 变形,利用相关公式计算 出弯曲应变。
弯曲应变的分布
应变分布图
通过绘制应变分布图,可以直观地了 解物体在弯曲变形过程中应变的大小 和分布情况。
应变集中
应变梯度
在弯曲变形过程中,物体不同部位上 的应变大小和方向可能不同,形成应 变梯度。
在物体受力点附近区域,应变会集中 增大,可能导致材料疲劳或断裂。
材料力学的重要性
总结词
材料力学在工程设计和实践中具有重要意义。
详细描述
在工程设计和实践中,材料力学是必不可少的学科之一。通过对材料力学的研究 ,工程师可以更好地理解材料的性能,预测其在各种工况下的行为,从而设计出 更加安全、可靠、经济的工程结构。
材料力学的基本假设
总结词
材料力学基于一系列基本假设,这些假设简 化了问题的复杂性,使得分析更为简便。
学习目标
01
02
03
04
掌握材料力学的基本概念、原 理和分析方法。
理解弯曲问题的特点和解决方 法。
能够运用所学知识解决简单的 弯曲问题。
培养分析问题和解决问题的能 力,提高力学素养。
02
材料力学基础
材料力学的定义
总结词
材料力学是一门研究材料在各种 力和力矩作用下的行为的学科。
《平面弯曲变形》课件

平面弯曲变形的应用实 例
桥梁和建筑结构的平面弯曲变形分析
桥梁结构:桥梁 的平面弯曲变形 分析,包括梁、 拱、索等结构
建筑结构:建筑结构 的平面弯曲变形分析, 包括框架、剪力墙、 筒体等结构
变形原因:荷载、 温度、湿度、地 震等外部因素引 起的变形
变形影响:对结构 安全性、稳定性、 耐久性的影响
变形控制:通过设 计、施工、维护等 手段控制变形,保 证结构安全
剪切应力的分布规律:剪切应力在剪切面上分布不均匀,靠近剪切面中心处应力较小, 远离剪切面中心处应力较大
剪切应力的影响因素:剪切力、剪切面形状、材料性质等
剪切应力的应用:在工程设计中,需要考虑剪切应力对结构的影响,以避免结构破坏 或失效。
平面弯曲变形的能量平 衡
弹性势能与动能之间的关系
弹性势能:物体在弹性形变过 程中储存的能量
感谢观看
汇报人:
平面弯曲变形可以分为弹性变形和塑性变形两种类型。
弹性变形是指物体在外力作用下,其形状和尺寸发生变化,但外力消失后,物体可以 恢复到原来的形状和尺寸。
塑性变形是指物体在外力作用下,其形状和尺寸发生变化,但外力消失后,物体不能 恢复到原来的形状和尺寸。
平面弯曲变形的分类
弯曲变形:物体在外力作用下发生弯曲变形 扭转变形:物体在外力作用下发生扭转变形 弯曲-扭转变形:物体在外力作用下同时发生弯曲和扭转变形 弯曲-弯曲变形:物体在外力作用下同时发生弯曲和弯曲变形
平面弯曲变形的稳定性 分析
稳定性分析的基本概念
稳定性分析的目的:确定结构在受力作用下的稳定性 稳定性分析的方法:有限元分析、能量法等 稳定性分析的指标:临界载荷、临界应力等 稳定性分析的应用:结构设计、优化等
稳定性分析的方法和步骤
弯曲变形课件

其余部分被看作为刚体,因此又称为逐段刚化法或 逐段求和法。
注意
迭加法是利用载荷迭加;是分解载荷; 广义迭加法将梁各部份变形对所求截面的挠度和转
角的贡献量进行迭加;是分解梁。
例5. 图示悬臂梁左侧受均布载荷,用迭加法求
自由端的挠度和转角。已知EI为常数。 解:
f B fC θC L 2
2.用迭加法求解静不定梁
变形协调条件和补充方程
fB 0
f B f Bq f BR 0
qL4 RBR L3 0 8EI 3EI
3qL R B 8
当此段梁受到正弯矩时,挠曲轴
为凹曲线,其二阶导数也为正。
当此段梁受到负弯矩时,挠曲轴
为凸曲线,其二阶导数也为负。
挠曲轴近似微分方程
M( x ) v" EI z
6.3 用积分法求弯曲变形 (Beam deflection by integration )
1.挠曲轴近似微分方程的积分
挠度。已知抗弯刚度EI为常数。 解:
Pb RA L
" 1
Pa RB L
Pb AD : EIv x1 (0 x1 a) L
" DB : EIv2
( a x2 L )
Pb x2 P( x2 a) L
Pb EIv x1 (0 x1 a) L Pb 2 v1 ' x1 C 1 2 EIL Pb 3 v1 x1 C 1 x1 D1 6EIL
L 4 L 3 q ( ) q( ) 4 7 qL L 2 2 8EI 6EI 2 384EI
L q ( )3 3 qL θB θC 2 6EI 48EI
材料力学课件第六章1 弯曲变形
代入通解得方程组: F (0) 2 Fl (0) C 0
2 F 1 3 (0) Fl (0) 2 C (0) D 0 6 2 D0
解得: C 0, 6、确定挠曲线方程和转角方程: F EIw ' x 2 Flx 2 F Fl 2 EIw x 3 x 6 2 7、求截面位移
由方程所确定的曲率:
1 3 2 2 ( x) dw 1 dx
d w dx2 dw 1 dx
2 2
d 2w dx2
y
w x
x
3
F
因此有:
2
2
M ( x) EI
dw d 2 w M ( x) 又 1 得: 2 dx EI dx
二、画AB、DE受力图
三、变形协调条件 三、建立补充方程
v AB中 vDE中
( P RC ) L RC L2 48EI1 48EI 2
3 1 3
D
E
3 I 2 L1 P 解得:RC 3 3 I 2 L1 I1 L2 I1 L3 P 2 AB梁负担:P RC 3 3 I 2 L1 I1 L2
ห้องสมุดไป่ตู้
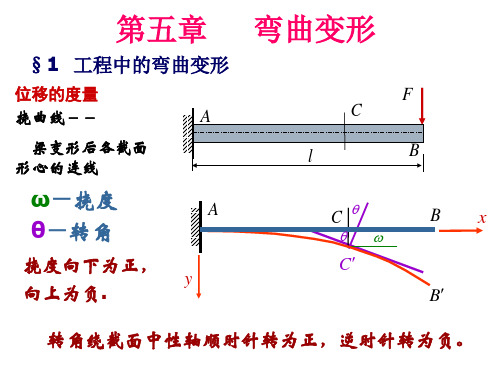
水平位移 2、弯曲变形的度量: (1)截面位移及特点: •横截面形心的竖向线位移 •横截面绕中性轴的角位移。 •横截面形心的水平线位移, 较竖向线位移小许多。
(2)度量变形的基本量: •挠度w: 横截面形心的竖向线位移,向上为正。 •截面转角θ :横截面绕中性轴的角位移,逆时针为正。
3、弯曲变形简化计算 (1)简化: 认为截面只有竖向位移。 y (2)简化后问题的特点: •挠曲线方程为挠度方程:
2 F 1 3 (0) Fl (0) 2 C (0) D 0 6 2 D0
解得: C 0, 6、确定挠曲线方程和转角方程: F EIw ' x 2 Flx 2 F Fl 2 EIw x 3 x 6 2 7、求截面位移
由方程所确定的曲率:
1 3 2 2 ( x) dw 1 dx
d w dx2 dw 1 dx
2 2
d 2w dx2
y
w x
x
3
F
因此有:
2
2
M ( x) EI
dw d 2 w M ( x) 又 1 得: 2 dx EI dx
二、画AB、DE受力图
三、变形协调条件 三、建立补充方程
v AB中 vDE中
( P RC ) L RC L2 48EI1 48EI 2
3 1 3
D
E
3 I 2 L1 P 解得:RC 3 3 I 2 L1 I1 L2 I1 L3 P 2 AB梁负担:P RC 3 3 I 2 L1 I1 L2
ห้องสมุดไป่ตู้
水平位移 2、弯曲变形的度量: (1)截面位移及特点: •横截面形心的竖向线位移 •横截面绕中性轴的角位移。 •横截面形心的水平线位移, 较竖向线位移小许多。
(2)度量变形的基本量: •挠度w: 横截面形心的竖向线位移,向上为正。 •截面转角θ :横截面绕中性轴的角位移,逆时针为正。
3、弯曲变形简化计算 (1)简化: 认为截面只有竖向位移。 y (2)简化后问题的特点: •挠曲线方程为挠度方程:
材料力学_-刘鸿文-第四版_第六章_课件__弯曲变形
A
B
x l
y A
θ maxB
max
x
' Plx Px2
EI 2EI Plx 2 Px3
2EI 6EI
l
P
max 及 ωmax 都发生在自由端截面处
max
|xl
Pl 2 EI
Pl 2 2EI
Pl 2 2EI
(
)
max
|xl
Pl 3 3EI
()
例题: 图示一抗弯刚度为 EI 的简支梁, 在全梁上受集度为 q 的均布荷载作用。试求此梁的挠曲线方程和转角方程, 并确定其最大挠度 ωmax 和最大转角 max .
B
A
B
例题:确定梁的边界条件和连续条件
A
B
C
D
边界条件
A 0 D 0, D 0
EI M(x)
A
B
C
D
连续条件
C左 C右 , C左 C右 B左 B右
例题 : 图示一抗弯刚度为 EI 的悬臂梁, 在自由端受一集中力 P 作用。试求梁的挠曲线方程和转角方程, 并确定其最大挠度 ωmax 和最大转角 max .
由几何关系知, 平面曲线的曲率可写作
1 (x)
| (1
''| '2 ) 32
1 M(x)
( x) EI
| ''|
(1
'2
)
3 2
M ( x) EI
| ''|
(1
2
)
3 2
M ( x) EI
在规定的坐标系中,x 轴水平向右
为正,y 轴竖直向上为正。
y
M>0
第五章薄板弯曲ppt课件

在日常生活中,随处都可以看到浪费 粮食的 现象。 也许你 并未意 识到自 己在浪 费,也 许你认 为浪费 这一点 点算不 了什么
以未变形的中面为xy坐标面,中面各点 沿z轴的横向位移以w表示,称为挠度, 如图5-1所示。
一般挠度为中面各点坐标的函数,即 w=w(x,y)
称为挠曲面方程。
在日常生活中,随处都可以看到浪费 粮食的 现象。 也许你 并未意 识到自 己在浪 费,也 许你认 为浪费 这一点 点算不 了什么
1
x
2w x 2
1
y
2w y 2
1 2 2w
xy
xy
板挠曲面的曲率、扭曲率表示出板弯曲变形的程 度,这3个分量也可合称为曲率。可用列阵表示为
在日常生活中,随处都可以看到浪费 粮食的 现象。 也许你 并未意 识到自 己在浪 费,也 许你认 为浪费 这一点 点算不 了什么
1
x
1
1
依次将单元的4个节点坐标代入式(5.7b)及(5.8)
中,可得到4个节点的挠度w及转角θx和θy
这里共有12个方程,联系着12个节点位移分 量及12个a参数之间的关系,其矩阵表达式为
e [A]{a}
上式的逆转换式为
aA1e
(5.9)
在日常生活中,随处都可以看到浪费 粮食的 现象。 也许你 并未意 识到自 己在浪 费,也 许你认 为浪费 这一点 点算不 了什么
因此,前6项满足了单元的完备性要求。
在日常生活中,随处都可以看到浪费 粮食的 现象。 也许你 并未意 识到自 己在浪 费,也 许你认 为浪费 这一点 点算不 了什么
含有完全的三次多项式,其四次项是不完全的, 此种近似的挠度函数具有三次多项式的精度。
不完全四次项的两项是对称的,这使单元对x 及y轴具有同等的变形能力;当坐标轴转90o时, 单元不会表现出不同的弯曲挠度形式。
第七章 平面弯曲变形.ppt
P
2
Pl 4
l /2
l /2
ql
m
2
l
m 2
m 2
l
ql 2
ql 2 8
第七章 平面弯曲变形
内力与荷载集度的微分关系 q
A
B
x
lM图Pl源自1 ql2 8M图
Fs图 1
ql 2
1 ql 2
Fs图
1、无荷载分布段(q=0),FS图为水平线,M图为斜直线。
第七章 平面弯曲变形
内力与荷载集度的微分关系
1 、无荷载分布段(q=0),FS图为水平注线:,M图剪为力斜为直零线处。;
M图
Fs图
3 、集中力作用处,Fs图有突变,且突变量等于力值; M图有转折,且指向与荷载相同。
第七章 平面弯曲变形
内力与荷载集度的微分关系 1 、无荷载分布段(q=0),FS图为水平线,M图为斜直线。 2 、均布荷载段(q=常数),FS图为斜直线,M图为抛物线, 且凸向与荷载指向相同。 3 、集中力作用处,Fs图有突变,且突变量等于力值; M图有尖点,且指向与荷载相同。
Pl
M图
Fs图
第七章 平面弯曲变形
第七章 平面弯曲变形
注:内力计算可选
取控制截面结合内
力与荷载集度的微 分关系进行,并绘 制结构的内力图。
第七章 平面弯曲变形
叠加法绘制内力图 ql 2 4
注意: 是竖标相加,
不是图形的简单 拼合。
第七章 平面弯曲变形
1 ql2 16
q
l
q
l
1 ql2 16
各控制 截面弯矩为 多少。
第七章 平面弯曲变形
F1
F2
第七章 平面弯曲变形
第九章梁的弯曲变形-PPT精品文档

第九章 梁的弯曲变形
第一节
工程中的弯曲变形
梁在外载荷作用下将产生变形,梁不但要满足强 度条件,还要满足刚度条件,即要求梁在工作时的变 形不能超过一定范围,否则就会影响梁的正常工作。 一、挠曲线 挠曲线:图所示悬臂梁在纵向对称面内的外力F的 作用下,将产生平面弯 曲,变形后梁的轴线将变 为一条光滑的平面曲线, 称梁的挠曲线。 挠曲线方程
挠曲轴线 近似微分方程
M ( x) y EI
对梁的挠曲轴线近似微分方程式积分:
积分一次得转角方程:
M ( x ) y x C EI d
积分二次得挠度方程:
M ( x ) y d x d x Cx D EI
第九章 梁的弯曲变形 转角方程 挠度方程
M ( x ) y x C EI d M ( x ) y d x d x Cx D EI
式中积分常数C、D由边界条件(梁中已知的截面 位移)确定:
0 , y 0 简支梁: y A B
悬臂梁: 0 , A
y 0 A
由边界条件、变形连续条件可确定积分常数,通 过上面两个公式可计算梁任一截面的转角与挠度, 这方法称积分法。
第九章 梁的弯曲变形
例9-1 如图所示简支梁,跨度为l,受均布载荷 q作用,梁的抗弯曲刚度EI已知,求跨中截面C的挠 度及截面A处的转角。 解:梁的弯矩方程为:
第九章 梁的弯曲变形 挠曲轴线 近似微分方程 结论 两种情况下弯矩与曲线的二阶导数均同号,微分 方程式应取正号,即: 挠曲轴线 近似微分方程
M(x) y EI
M ( x) y EI
梁的挠曲轴线近似微分方程的适用条件:梁的变 形是线弹性的小变形。
ห้องสมุดไป่ตู้
第一节
工程中的弯曲变形
梁在外载荷作用下将产生变形,梁不但要满足强 度条件,还要满足刚度条件,即要求梁在工作时的变 形不能超过一定范围,否则就会影响梁的正常工作。 一、挠曲线 挠曲线:图所示悬臂梁在纵向对称面内的外力F的 作用下,将产生平面弯 曲,变形后梁的轴线将变 为一条光滑的平面曲线, 称梁的挠曲线。 挠曲线方程
挠曲轴线 近似微分方程
M ( x) y EI
对梁的挠曲轴线近似微分方程式积分:
积分一次得转角方程:
M ( x ) y x C EI d
积分二次得挠度方程:
M ( x ) y d x d x Cx D EI
第九章 梁的弯曲变形 转角方程 挠度方程
M ( x ) y x C EI d M ( x ) y d x d x Cx D EI
式中积分常数C、D由边界条件(梁中已知的截面 位移)确定:
0 , y 0 简支梁: y A B
悬臂梁: 0 , A
y 0 A
由边界条件、变形连续条件可确定积分常数,通 过上面两个公式可计算梁任一截面的转角与挠度, 这方法称积分法。
第九章 梁的弯曲变形
例9-1 如图所示简支梁,跨度为l,受均布载荷 q作用,梁的抗弯曲刚度EI已知,求跨中截面C的挠 度及截面A处的转角。 解:梁的弯矩方程为:
第九章 梁的弯曲变形 挠曲轴线 近似微分方程 结论 两种情况下弯矩与曲线的二阶导数均同号,微分 方程式应取正号,即: 挠曲轴线 近似微分方程
M(x) y EI
M ( x) y EI
梁的挠曲轴线近似微分方程的适用条件:梁的变 形是线弹性的小变形。
ห้องสมุดไป่ตู้
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
15
(2) 列近似微分方程,积分
Pb AC段: EIv1 = x1 l Pb 1 2 Pb 1 3 EIv1 = x1 C1 , EIv1 = x1 C1x1 D1 l 2 l 6 Pb CB段: EIv2 = x2 P(x2 a) l Pb 1 x22 1 2 P (x2 a) C2 EIv2 = l 2 2 Pb 1 x23 1 3 P (x2 a) C2x2 D2 EIv2 = l 6 6
l2 b2 x0 = 3
Pb 2 2 3 ( l b ) fmax = 9 3EIl
经讨论知,不论P力作用在何处,最大挠度总发 生在中点附近(或中点)。所以可近似地以中点的 21 挠度作为最大挠度。
关于确定积分常数 本例中 (书例6.3)
书上 p. 222: 采取了一些措施
(1) 列弯矩方程
18
将求得的积分常数代回方程,得:
Pb 2 2 2 AC段: EIv1 = (l b 3x1 ), 6l Pbx1 (l 2 2 2 b x1 ) EIv1 = 6l Pb 2 2 2 3l 2 b 3x2) (x2 a) ] CB段: EIv2 = [(l 6l b Pb 2 2 2 l b 3x2)x2 (x2 a) ] EIv2 = [(l 6l b
1 M(x) = (x ) EI
由高等数学公式
d2 v ± 2 1 dx = 3/2 2 (x ) dv 1 dx
6
1 = M(x) , (x ) EI
d2v ± dx 2
1 = 3/2 (x ) 2 dv
d2 v ± dx 2
例1 已知: q , l , EI = 常数。 求:vC, B。 解:分解为三个 简单载荷。
28
由p. 224 表6.1 中的10
5ql 4 vC1 = 384EI ql3 B1 = 24EI
由表6.1 中的8
29
由p. 224 表6.1 中的10
5ql 4 vC1 = 384EI ql 3 B1 = 24EI
dv 1 dx
方程中正负号的确定
d v M(x) ± 2 = dx EI
2
8
挠曲线的近似微分方程 在小变形的情况下,
dv 1 dx
方程中正负号的确定 所以方程中 应取正号。
d 2 v M(x) ± 2 = dx EI
d v M(x) = 2 dx EI
2
9
挠曲线的近似微分方程 在小变形的情况下,
2
2
则共同作用时: 2 d2 v d v1 EI d2v2 EI 2 = M(x) = M1(x)M2(x) = EI 2 2 d x dx dx d 2 (v1v2) = EI 2 v=v1v2 dx 即:共同作用下的挠度等于分别在M1(x) 、M2(x) 单独作用下的挠度的代数和。 综合以上讨论得到: 在线弹性小变形的条件下,外载荷与挠度 (力与 位移)成线性关系,可用叠加法计算梁的挠度。
1
(3) 确定积分常数
连续条件
v1 (a) =v2 (a) v1(a) =v2(a) C1 =C2, D1 = D2
边界条件 x1 =0时, v1 =0;
x2 =l 时,
v2 =0
代入相应的方程,得: D1 = D2 =0
Pb (l 2 2 b ) C1 =C2 = 6l
17
边界条件 x1 =0时, v1 =0;
由表6.1 中的8
vC2
B2
Pl 3 ql 4 = = 48EI 48EI Pl 2 ql 3 = = 16EI 16EI
30
由表6.1 中的8
4 ql Pl3 = vC2 = 48EI 48EI 3 2 Pl ql = B2 = 16EI 16EI
由表6.1 中的6
ql 4 ml2 = vC3 = 16EI 16EI ml ql3 = B3 = 3EI 3EI
弯曲变形的对称点处
=v=0
连续条件
12 在挠曲线的任意点处,有唯一的挠度和转角。
连续条件 在挠曲线的任意点处,有唯一的挠度和转角。 D点和C点 的连续条件 各为什么?
v1D =v2D=0 C点: v2D =v3D ,
D点: 梁的刚度条件
1D =2D 2D 3D
[ f ], max
(4) 求最大转角和最大挠度
19
(4) 求最大转角和最大挠度 最大转角
由图,最大转角 可能发生在A点 或B点。
Pb(l 2 b 2) A = 6EIl Pab(l b) = 6EIl
最大挠度
Pab(l a) B = 6EIl
20
最大挠度 经分析,最大挠 度发生在AC段。
令: v1 =0
中间铰处,挠度连续,转角不连续。
f
max []
13
例 2 (书例6.3) 已知:简支梁 受集中力作用。 求:转角和挠 曲线方程。 解: (1) 求支反力,列弯矩方程
Pb 支反力 , RA = l 弯矩方程 Pb AC段: M1 = x1 l
Pa RB = l (0 x1 a)
14
(1) 求支反力,列弯矩方程
Pb Pb AC段:M1 = x1 CB段: M2 = x2 P(x2 a) l l
措施1 各段的坐标原点为同一点:左端点。 措施2 积分时,保留(x2-a) 作为自变量。
22
关于确定积分常数 措施1 各段的坐标原点为同一点:左端点。 措施2 积分时,保留(x2-a) 作为自变量。 措施3 有分布载荷时,需将其延长到梁的右端, 并在延长部分加上等值反向的分布载荷。 措施4 有集中力偶时,采用 m(xi-ai)0 的形式。
Pb AC段: M1 = x1 l (0 x1 a) Pb CB段: M2 = x2 P(x2 a) l
(2) 列近似微分方程,积分
弯矩方程
(a x2 b)
Pb AC段: EIv1 = x1 l Pb 1 2 Pb 1 3 EIv1 = x1 C1 , EIv1 = x1 C1x1 D1 l 2 l 6
33
再分为两种载荷。 由p. 188 表6.ql 3 C1 = 6EI
由p. 224 表6.1 中的4
4 ql q(l /2) = = , 128EI 8EI
4 3
vB2
B2
q(l/2) = 6EI
ql 3 = 4834 EI
由p. 188 表6.1 中的4
dv 1 dx
方程中正负号的确定
d v M(x) ± 2 = dx EI
2
方程中应取正号。
转角:
d2v M(x) = dx 2 EI dv tan = dx
注意: 挠曲线的近似微分方程仅适用于小变形的 10 平面弯曲问题。
§6. 3 用积分法求弯曲变形
d v M(x) 挠曲线近似微分方程 = 2 dx EI
26
叠加法的基础 熟记简单载荷作用下的挠度和转角。 见教材 p. 224 表6.1 。 要求记住:1、2、4、6、8、10。 叠加法的两种类型 (1) 载荷叠加法 将载荷分解为几个简单载荷,分别求解后, 进行叠加; (2) 变形叠加法 在内力不变的前提下,将梁分解(或刚化)为 几段,求出各段的变形,然后进行叠加。 27
36
例 3 (书例6.5) 已知:P1 , P2 , a, l, EI = 常数。 求:vC, B。 解:简化为外伸 梁如图。 将AC梁分为两 个部分。 简支梁在B处的 内力: Q=P 1
M =P 1a
37
将AC梁分为两 个部分。 简支梁在B处的 内力: Q=P 1
d 2 v M(x) = dx 2 EI
这是一个线性的常微分方程。 设:
2
M(x) = M1(x)M2(x)
d v1 = M1(x) , dx 2 EI
d v2 = M2(x) dx 2 EI
d v1 d v2 EI 2 dx dx 2
25
2
则共同作用时: 2 d v EI 2 = M(x) = M1(x)M2(x) = EI dx d2 (v1v2) = EI dx2
35
vC2 = vC21 vC22 = vB2 B2 l /2 ql4 ql3 l 7ql4 = = 128EI 48EI 2 384EI 3 ql C2 =B2= 48EI
所以
vC = vC1 vC2 4 41ql = 384EI
7ql 3 C =C1C2= 48EI
4
梁的轴线变形后的曲线。 对称弯曲时,是一条平面曲线。
挠度 横截面形心沿y方向 的位移,用v表示。
转角 变形后,横截面相对其原来位置转过的角度。 用 表示。转角 以逆时针为正。 v = f (x) 挠曲线方程
转角即为挠曲线在该点的切线与x轴的夹角。
dv tan = dx
5
2 挠曲线的微分方程 上一章中,已得到:忽略剪力对变形的影响时, 梁对称弯曲时的曲率为
31
由表6.1 中的6
= vC3 = 16EI 16EI ql 3 ml = B3 = 3EI 3EI
叠加
ml 2
ql4
11ql4 vC = vC1 vC2 vC3 = 384EI
B =B1 B2 B3=
11ql3 48EI
32
例2 已知: q , l , EI = 常数。 求:vC, C。 解: 表中没有对应 的情况。 方法:凑成表中相 应的情况。 再分为两种载荷。 由p. 188 表6.1 中的4
vB2
ql q(l /2) q(l/2) = = , B2 = 128EI 8EI 6EI
4
4
3
ql 3 = 48EI
注意,变形后 BC为直线。
(2) 列近似微分方程,积分
Pb AC段: EIv1 = x1 l Pb 1 2 Pb 1 3 EIv1 = x1 C1 , EIv1 = x1 C1x1 D1 l 2 l 6 Pb CB段: EIv2 = x2 P(x2 a) l Pb 1 x22 1 2 P (x2 a) C2 EIv2 = l 2 2 Pb 1 x23 1 3 P (x2 a) C2x2 D2 EIv2 = l 6 6
l2 b2 x0 = 3
Pb 2 2 3 ( l b ) fmax = 9 3EIl
经讨论知,不论P力作用在何处,最大挠度总发 生在中点附近(或中点)。所以可近似地以中点的 21 挠度作为最大挠度。
关于确定积分常数 本例中 (书例6.3)
书上 p. 222: 采取了一些措施
(1) 列弯矩方程
18
将求得的积分常数代回方程,得:
Pb 2 2 2 AC段: EIv1 = (l b 3x1 ), 6l Pbx1 (l 2 2 2 b x1 ) EIv1 = 6l Pb 2 2 2 3l 2 b 3x2) (x2 a) ] CB段: EIv2 = [(l 6l b Pb 2 2 2 l b 3x2)x2 (x2 a) ] EIv2 = [(l 6l b
1 M(x) = (x ) EI
由高等数学公式
d2 v ± 2 1 dx = 3/2 2 (x ) dv 1 dx
6
1 = M(x) , (x ) EI
d2v ± dx 2
1 = 3/2 (x ) 2 dv
d2 v ± dx 2
例1 已知: q , l , EI = 常数。 求:vC, B。 解:分解为三个 简单载荷。
28
由p. 224 表6.1 中的10
5ql 4 vC1 = 384EI ql3 B1 = 24EI
由表6.1 中的8
29
由p. 224 表6.1 中的10
5ql 4 vC1 = 384EI ql 3 B1 = 24EI
dv 1 dx
方程中正负号的确定
d v M(x) ± 2 = dx EI
2
8
挠曲线的近似微分方程 在小变形的情况下,
dv 1 dx
方程中正负号的确定 所以方程中 应取正号。
d 2 v M(x) ± 2 = dx EI
d v M(x) = 2 dx EI
2
9
挠曲线的近似微分方程 在小变形的情况下,
2
2
则共同作用时: 2 d2 v d v1 EI d2v2 EI 2 = M(x) = M1(x)M2(x) = EI 2 2 d x dx dx d 2 (v1v2) = EI 2 v=v1v2 dx 即:共同作用下的挠度等于分别在M1(x) 、M2(x) 单独作用下的挠度的代数和。 综合以上讨论得到: 在线弹性小变形的条件下,外载荷与挠度 (力与 位移)成线性关系,可用叠加法计算梁的挠度。
1
(3) 确定积分常数
连续条件
v1 (a) =v2 (a) v1(a) =v2(a) C1 =C2, D1 = D2
边界条件 x1 =0时, v1 =0;
x2 =l 时,
v2 =0
代入相应的方程,得: D1 = D2 =0
Pb (l 2 2 b ) C1 =C2 = 6l
17
边界条件 x1 =0时, v1 =0;
由表6.1 中的8
vC2
B2
Pl 3 ql 4 = = 48EI 48EI Pl 2 ql 3 = = 16EI 16EI
30
由表6.1 中的8
4 ql Pl3 = vC2 = 48EI 48EI 3 2 Pl ql = B2 = 16EI 16EI
由表6.1 中的6
ql 4 ml2 = vC3 = 16EI 16EI ml ql3 = B3 = 3EI 3EI
弯曲变形的对称点处
=v=0
连续条件
12 在挠曲线的任意点处,有唯一的挠度和转角。
连续条件 在挠曲线的任意点处,有唯一的挠度和转角。 D点和C点 的连续条件 各为什么?
v1D =v2D=0 C点: v2D =v3D ,
D点: 梁的刚度条件
1D =2D 2D 3D
[ f ], max
(4) 求最大转角和最大挠度
19
(4) 求最大转角和最大挠度 最大转角
由图,最大转角 可能发生在A点 或B点。
Pb(l 2 b 2) A = 6EIl Pab(l b) = 6EIl
最大挠度
Pab(l a) B = 6EIl
20
最大挠度 经分析,最大挠 度发生在AC段。
令: v1 =0
中间铰处,挠度连续,转角不连续。
f
max []
13
例 2 (书例6.3) 已知:简支梁 受集中力作用。 求:转角和挠 曲线方程。 解: (1) 求支反力,列弯矩方程
Pb 支反力 , RA = l 弯矩方程 Pb AC段: M1 = x1 l
Pa RB = l (0 x1 a)
14
(1) 求支反力,列弯矩方程
Pb Pb AC段:M1 = x1 CB段: M2 = x2 P(x2 a) l l
措施1 各段的坐标原点为同一点:左端点。 措施2 积分时,保留(x2-a) 作为自变量。
22
关于确定积分常数 措施1 各段的坐标原点为同一点:左端点。 措施2 积分时,保留(x2-a) 作为自变量。 措施3 有分布载荷时,需将其延长到梁的右端, 并在延长部分加上等值反向的分布载荷。 措施4 有集中力偶时,采用 m(xi-ai)0 的形式。
Pb AC段: M1 = x1 l (0 x1 a) Pb CB段: M2 = x2 P(x2 a) l
(2) 列近似微分方程,积分
弯矩方程
(a x2 b)
Pb AC段: EIv1 = x1 l Pb 1 2 Pb 1 3 EIv1 = x1 C1 , EIv1 = x1 C1x1 D1 l 2 l 6
33
再分为两种载荷。 由p. 188 表6.ql 3 C1 = 6EI
由p. 224 表6.1 中的4
4 ql q(l /2) = = , 128EI 8EI
4 3
vB2
B2
q(l/2) = 6EI
ql 3 = 4834 EI
由p. 188 表6.1 中的4
dv 1 dx
方程中正负号的确定
d v M(x) ± 2 = dx EI
2
方程中应取正号。
转角:
d2v M(x) = dx 2 EI dv tan = dx
注意: 挠曲线的近似微分方程仅适用于小变形的 10 平面弯曲问题。
§6. 3 用积分法求弯曲变形
d v M(x) 挠曲线近似微分方程 = 2 dx EI
26
叠加法的基础 熟记简单载荷作用下的挠度和转角。 见教材 p. 224 表6.1 。 要求记住:1、2、4、6、8、10。 叠加法的两种类型 (1) 载荷叠加法 将载荷分解为几个简单载荷,分别求解后, 进行叠加; (2) 变形叠加法 在内力不变的前提下,将梁分解(或刚化)为 几段,求出各段的变形,然后进行叠加。 27
36
例 3 (书例6.5) 已知:P1 , P2 , a, l, EI = 常数。 求:vC, B。 解:简化为外伸 梁如图。 将AC梁分为两 个部分。 简支梁在B处的 内力: Q=P 1
M =P 1a
37
将AC梁分为两 个部分。 简支梁在B处的 内力: Q=P 1
d 2 v M(x) = dx 2 EI
这是一个线性的常微分方程。 设:
2
M(x) = M1(x)M2(x)
d v1 = M1(x) , dx 2 EI
d v2 = M2(x) dx 2 EI
d v1 d v2 EI 2 dx dx 2
25
2
则共同作用时: 2 d v EI 2 = M(x) = M1(x)M2(x) = EI dx d2 (v1v2) = EI dx2
35
vC2 = vC21 vC22 = vB2 B2 l /2 ql4 ql3 l 7ql4 = = 128EI 48EI 2 384EI 3 ql C2 =B2= 48EI
所以
vC = vC1 vC2 4 41ql = 384EI
7ql 3 C =C1C2= 48EI
4
梁的轴线变形后的曲线。 对称弯曲时,是一条平面曲线。
挠度 横截面形心沿y方向 的位移,用v表示。
转角 变形后,横截面相对其原来位置转过的角度。 用 表示。转角 以逆时针为正。 v = f (x) 挠曲线方程
转角即为挠曲线在该点的切线与x轴的夹角。
dv tan = dx
5
2 挠曲线的微分方程 上一章中,已得到:忽略剪力对变形的影响时, 梁对称弯曲时的曲率为
31
由表6.1 中的6
= vC3 = 16EI 16EI ql 3 ml = B3 = 3EI 3EI
叠加
ml 2
ql4
11ql4 vC = vC1 vC2 vC3 = 384EI
B =B1 B2 B3=
11ql3 48EI
32
例2 已知: q , l , EI = 常数。 求:vC, C。 解: 表中没有对应 的情况。 方法:凑成表中相 应的情况。 再分为两种载荷。 由p. 188 表6.1 中的4
vB2
ql q(l /2) q(l/2) = = , B2 = 128EI 8EI 6EI
4
4
3
ql 3 = 48EI
注意,变形后 BC为直线。