自动控制球杆系统实验指导书-2016
球杆仪作业指导书
球杆仪作业指导书
A/0
4/15
品质部
/11/25
/
检验项目
图示
检验步骤
品质要求
工量治具
作业时间
2
球
杆
仪
中
心
座
在
机
床
上
的
定
位
2.1将带有磁性的工具球碗安装在适当的刀柄上。注意:以免工具球碗被夹坏,只要工具球碗夹紧时用手转不动即可。
2.2将刀柄安装在机床主轴上。
发指令让控制器将主轴定向并锁紧主轴。一般控制器指令为M19。
修改及设定。4.5选择新机型1)立式加工中心
2)卧式加工中心
3)卧式车床
4)立式车床
1.如果你还没有连接球杆仪,请将球杆仪连接到你的计算机串行口。2.当你第一次运行软件,或者,如果你使用不同的球杆仪,你将被请求在弹出的对话窗中(如下图所示)输入刻度因子。刻度因子打印在球杆仪传感器的标签上或传感器盒子上
文件编号:CG-QC-03-002
版次
页次
制订部门
制订日期
修订日期
文件名称
球杆仪作业指导书
A/0
8/15
品质部
/11/25
/
检验项目
图示
检验步骤
品质要求
工量治具
作业时间
3
编
写
与
运
行
程
序
G54
G90
M05
G17
SPOS=0
F3000
G01X-151.5Y0Z0
M00
G01X-150.Y0
G03I150.J0
修订
修订日期
0
全文
A/0
实验5--球杆系统的数字PID控制实验

学生实验报告开课学院及实验室:学院机电年级、专业、班姓名学号实验课程名称计算机控制技术成绩实验项目名称实验5 球杆系统的数字PID控制实验指导教师一、实验目的1.熟悉Matlab\simulink软件;2.通过试凑法确定球杆系统的PID参数;3.在球杆系统上验证PID参数的控制效果。
二、使用仪器、材料1.球杆系统装置。
2.装有matlab2012b的计算机。
三、实验步骤1.现场实验前先用Matlab\simulink软件进行仿真。
给出球杆装置的理想传递函数(1)用Simulink设计出该系统的模型。
输入信号为阶跃信号,控制器选择PID。
(2)用试凑法确定出合适的PID参数。
(3)比较设置不同参数时系统的响应特性。
2.进行现场实验。
测试好现场装置后,试着将仿真后得出的几个PID参数输入到控制系统中,观察球杆装置的运行情况。
在现场调整参数使系统取得良好的控制效果。
(1)打开球杆系统电控箱上的电源按钮,在MATLAB/Current Folder 中打开文件系统自带程序“PID_ Control_Modify.slx”,会弹出如图所示的实时控制界面(2)双击“PID Controller”模块,设置Kp、Ki、Kd的参数,参数为仿真过程得出的参数。
双击“Step”模块,设置阶跃信号参数:step time=0,initial value=0,final value=0.25。
(3) 点击编译程序,待编译成功后,点击连接程序,点击运行程序,观察球杆和小球的运动现象。
待小球静止后,点击停止程序,打开示波器scope观察响应曲线的超调量,调节时间。
若能达到理想的控制效果,说明所设置的PID参数合理。
否则,根据波形呈现的超调量,调节时间,以及最终稳定后呈现的静差,调整PID参数,继续调试系统,最终达到理想的控制效果。
四、实验过程原始记录(程序、数据、图表、计算等)1.Simulink仿真程序框图如下:系统输入为阶跃信号,阶跃时间为0,初始值为0,终值定为1,采样时间为0.1。
自动控制球杆系统实验指导书-2016资料
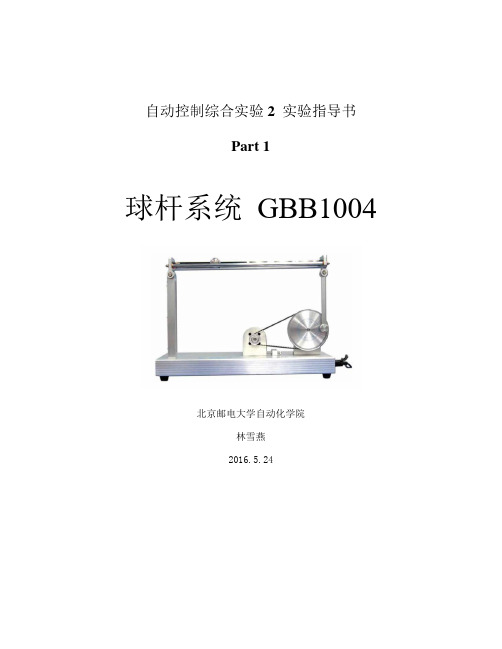
自动控制综合实验2 实验指导书Part 1球杆系统GBB1004北京邮电大学自动化学院林雪燕2016.5.24前言自动控制是一门理论与实践并重的技术,在成功掌握了理论知识(经典控制、现代控制)的同时再配合做一些经典的自动控制实验,从而加深对自动控制的理解与掌握,为今后从事自动控制的设计和研究工作打下扎实的基础。
为了更好地配合理论教学,达到理论与实践完美的结合,将自动控制相关的实验独立设置成一门实验课:自动控制综合实验。
自动控制理论实验主要目的是通过实验进一步理解自动控制理论的基本概念,熟悉和掌握控制系统的分析方法和设计方法,掌握常用工程软件使用,如MATLAB、LabVIEW 等。
上学期开设的自动控制综合实验(1)主要内容为控制系统的Matlab/simulink 仿真和基于实验箱的硬件模拟,以电路系统为研究对象。
本学期开始的自动控制综合实验(2)的内容是基于典型控制理论实验设备(球杆系统和倒立摆系统),熟悉和掌握控制系统的分析和设计方法。
球杆系统机械简单,结构紧凑,安全性高,采用智能伺服驱动模块和Windows 程序界面,可用于教学或科研。
对于自动控制理论等课程来说,针对设备的非线性与不稳定性特点,设计有效的控制系统是项有意义的工作。
球杆系统要完成的实验有:实验一:小球位置的数据采集处理实验二:球杆系统的PID法控制实验三:球杆系统的根轨迹法控制实验四:球杆系统的频率响应法控制倒立摆是一个典型的不稳定系统,同时又具有多变量、非线性、强耦合的特性,是自动控制理论中的典型被控对象。
运用控制手段可使之具有一定的稳定性和良好的性能。
许多抽象的控制概念如控制系统的稳定性、可控性、系统收敛速度和系统抗干扰能力等,都可以通过倒立摆系统直观的表现出来。
倒立摆系统要完成的实验有:实验五:倒立摆的数学建模及稳定性分析实验六:倒立摆的状态反馈控制实验七:不同状态下状态反馈控制效果比较实验八:倒立摆的LQR 控制同学们完成实验后,要完成相应的实验报告,并及时提交。
球杆实验指导

球杆系统GBB1004实验指导书1.2011年球杆系统简介1.1 要点球杆系统是为学习与研究自动控制和运动控制等专业课程而专门开发的,对于经典控制理论和现代控制理论等课程,是一个非常便于基础实验和研究的研究平台。
1.2 球杆系统的特点球杆系统是一个典型的非线性系统,理论上而言,它是一个真正意义上的非线性系统,其执行机构还具有很多非线性特性,包括:♦死区♦直流马达和带轮的传动非线性。
♦位置测量的不连续性。
♦导轨表面不是严格的光滑表面,产生非线性阻力。
这些非线性因素对于传统意义上的测量和建模造成很大的影响,并对系统的控制性能造成非常大的影响,怎样去设计一个鲁棒的控制系统,是现代控制理论的一个重要问题。
固高科技提供的球杆系统既可以用于研究控制系统运行的非线性动力学,也可以用于研究控制系统的非线性观测器等,是一个较为通用的实验设备。
因为系统机械结构的特点,球杆系统具有一个最重要的特性——不稳定性,对于传统的实验方法,存在一些实验的难处,不稳定的系统容易对实验人员产生危险或是不可预料的伤害,球杆系统相对而言,机械比较简单,结构比较紧凑,安全性也比较高,是一个可以避免这些危险和伤害的实验设备。
采用智能伺服驱动模块和直观的Windows程序界面,是控制系统实验的一个理想的实验设备。
1.3 主要组成部分球杆系统主要由以下几部分组成,如图所示。
♦球杆系统组成:包含直流伺服马达和直流电源的机械部分IPM100智能伺服驱动♦控制计算机1.3.1 机械部分机械部分包括底座、小球、横杆、减速皮带轮、支撑部分、马达等。
小球可以在横杆上自由的滚动,横杆的一端通过转轴固定,另一端可以上下转动,通过控制直流伺服电机的位置,带动皮带轮转动,通过传动机构就可以控制横杆的倾斜角。
直流伺服电机带有增量式编码器(1000P/R),可以检测电机的实际位置,在横杆上的凹槽内,有一线性的传感器用于检测小球的实际位置,两个实际位置的信号都被传送给控制系统,构成一个闭环反馈系统。
球杆定位控制系统实验指导书
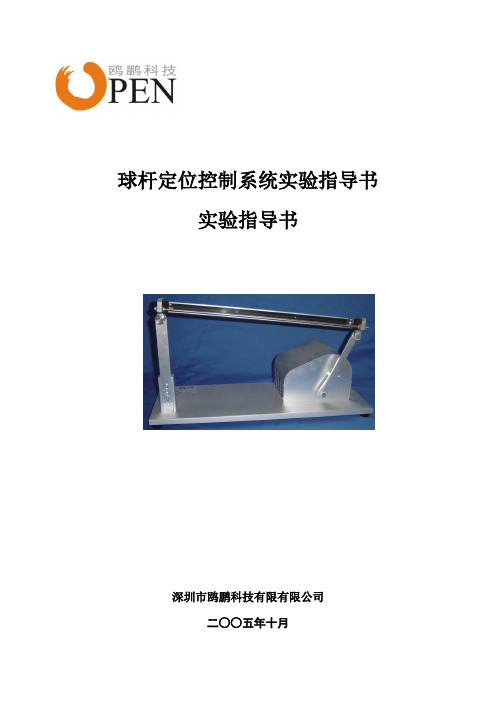
球杆定位控制系统实验指导书实验指导书深圳市鸥鹏科技有限有限公司二○○五年十月目录目录 (2)一、球杆定位控制系统认知实验 (5)实验目的 (5)实验内容 (5)实验步骤 (5)实验报告 (7)二、系统建模分析 (8)1、机械建模分析 (8)2 电机建模分析 (8)三、球杆定位控制系统控制实验 (11)实验目的 (11)实验内容 (11)1、P控制器设计 (11)2、PD控制器设计 (12)2、PID控制器设计 (12)实验步骤 (12)实验报告 (20)四、球杆定位控制系统扩展控制实验 (21)4. 1 根轨迹算法设计 (21)4.2. 频率响应法设计 (21)前言球杆定位控制系统是为自动化,机械电子,电气工程等专业的基础控制课程教学实验而设计的实验设备。
通过对球杆系统进行分析和实验,学生可以学习对物理系统的建模和控制系统的设计,熟悉PID控制的设计和调节,以及利用别的控制理论和算法进行实验。
一、球杆定位控制系统认知实验实验目的认知球杆定位控制系统的结构和工作原理,熟悉系统的工作流程,并检验系统各通道的工作状况是否正常。
实验内容球杆定位控制系统结构如下图,有连杆机构及相应的电气驱动,传感部分组成,其工作流程为通过电机驱动,带动连杆运动,改变钢球所在滑道的倾斜角度,使钢球在重力作用下沿滑道运动。
本实验内容是要详细了解系统的结构,关键部件,并联机测试各部件工作是否正常。
实验步骤1、认真观察球杆定位控制系统,指出系统的各个部分,打开后盖,认知相关的电气控制部分及机械传动部分,并做好记录。
2、安装好后盖,将电源线,通讯线与电源箱,电脑正常连接。
3、接通电源,打开测试软件:1)在matlab下打开QGTEST.MDL进入测试界面:2)点击运行:3)设置运动位置POS,观察球杆运动情况,4)切换伺服开关,运动,停止开关,测试硬件响应5)改变运动速度,加速度及位置,观察运动情况6)打开各个示波器7)用手轻拨钢球,让钢球在滑道上缓慢滚动,观察采集到钢球的位置数据8)停止实时仿真,观察各示波器数据,并保存到相应的文件实验报告1写出球杆定位控制器通的主要组成,并描述各模块的功能与实现。
自动控制实验报告——球杆系统 倒立摆 bupt
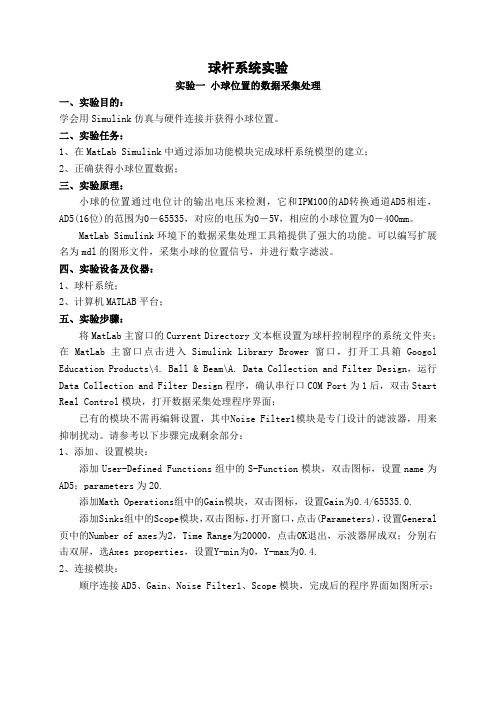
球杆系统实验实验一小球位置的数据采集处理一、实验目的:学会用Simulink仿真与硬件连接并获得小球位置。
二、实验任务:1、在MatLab Simulink中通过添加功能模块完成球杆系统模型的建立;2、正确获得小球位置数据;三、实验原理:小球的位置通过电位计的输出电压来检测,它和IPM100的AD转换通道AD5相连,AD5(16位)的范围为0-65535,对应的电压为0-5V,相应的小球位置为0-400mm。
MatLab Simulink环境下的数据采集处理工具箱提供了强大的功能。
可以编写扩展名为mdl的图形文件,采集小球的位置信号,并进行数字滤波。
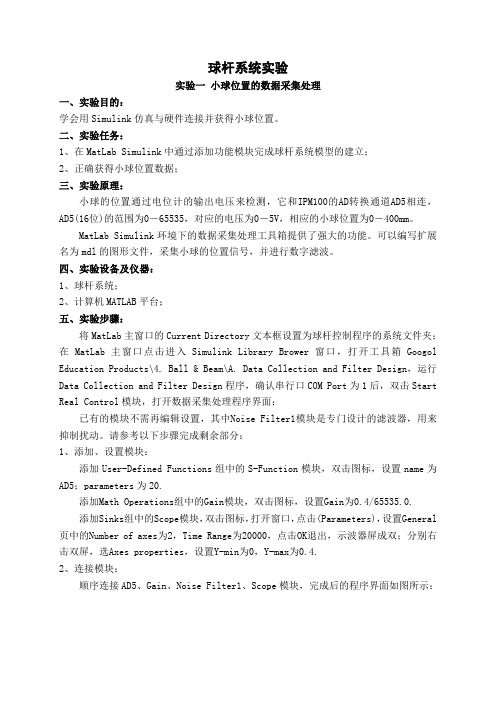
四、实验设备及仪器:1、球杆系统;2、计算机MATLAB平台;五、实验步骤:将MatLab主窗口的Current Directory文本框设置为球杆控制程序的系统文件夹;在MatLab主窗口点击进入Simulink Library Brower窗口,打开工具箱Googol Education Products\4. Ball & Beam\A. Data Collection and Filter Design,运行Data Collection and Filter Design程序,确认串行口COM Port为1后,双击Start Real Control模块,打开数据采集处理程序界面;已有的模块不需再编辑设置,其中Noise Filter1模块是专门设计的滤波器,用来抑制扰动。
请参考以下步骤完成剩余部分:1、添加、设置模块:添加User-Defined Functions组中的S-Function模块,双击图标,设置name为AD5;parameters为20.添加Math Operations组中的Gain模块,双击图标,设置Gain为0.4/65535.0.添加Sinks组中的Scope模块,双击图标,打开窗口,点击(Parameters),设置General 页中的Number of axes为2,Time Range为20000,点击OK退出,示波器屏成双;分别右击双屏,选Axes properties,设置Y-min为0,Y-max为0.4.2、连接模块:顺序连接AD5、Gain、Noise Filter1、Scope模块,完成后的程序界面如图所示:图1.1.1 完成后的数据采集处理程序界面点击运行程序,双击Scope模块,显示滤波前后的小球位置-时间图,拨动小球在横杆上往返滚动,可得如下实验结果:图1.1.2 小球位置的数据采集处理六、实验总结通过这个实验、我学会了球杆系统模型的建立以及小球位置的获取。
自动控制球杆系统实验指导书-2016教材
自动控制综合实验2 实验指导书Part 1球杆系统GBB1004北京邮电大学自动化学院林雪燕2016.5.24前言自动控制是一门理论与实践并重的技术,在成功掌握了理论知识(经典控制、现代控制)的同时再配合做一些经典的自动控制实验,从而加深对自动控制的理解与掌握,为今后从事自动控制的设计和研究工作打下扎实的基础。
为了更好地配合理论教学,达到理论与实践完美的结合,将自动控制相关的实验独立设置成一门实验课:自动控制综合实验。
自动控制理论实验主要目的是通过实验进一步理解自动控制理论的基本概念,熟悉和掌握控制系统的分析方法和设计方法,掌握常用工程软件使用,如MATLAB、LabVIEW 等。
上学期开设的自动控制综合实验(1)主要内容为控制系统的Matlab/simulink 仿真和基于实验箱的硬件模拟,以电路系统为研究对象。
本学期开始的自动控制综合实验(2)的内容是基于典型控制理论实验设备(球杆系统和倒立摆系统),熟悉和掌握控制系统的分析和设计方法。
球杆系统机械简单,结构紧凑,安全性高,采用智能伺服驱动模块和Windows 程序界面,可用于教学或科研。
对于自动控制理论等课程来说,针对设备的非线性与不稳定性特点,设计有效的控制系统是项有意义的工作。
球杆系统要完成的实验有:实验一:小球位置的数据采集处理实验二:球杆系统的PID法控制实验三:球杆系统的根轨迹法控制实验四:球杆系统的频率响应法控制倒立摆是一个典型的不稳定系统,同时又具有多变量、非线性、强耦合的特性,是自动控制理论中的典型被控对象。
运用控制手段可使之具有一定的稳定性和良好的性能。
许多抽象的控制概念如控制系统的稳定性、可控性、系统收敛速度和系统抗干扰能力等,都可以通过倒立摆系统直观的表现出来。
倒立摆系统要完成的实验有:实验五:倒立摆的数学建模及稳定性分析实验六:倒立摆的状态反馈控制实验七:不同状态下状态反馈控制效果比较实验八:倒立摆的LQR 控制同学们完成实验后,要完成相应的实验报告,并及时提交。
自动控制实验报告——球杆系统-倒立摆-bupt概要

球杆系统实验实验一小球位置的数据采集处理一、实验目的:学会用Simulink仿真与硬件连接并获得小球位置。
二、实验任务:1、在MatLab Simulink中通过添加功能模块完成球杆系统模型的建立;2、正确获得小球位置数据;三、实验原理:小球的位置通过电位计的输出电压来检测,它和IPM100的AD转换通道AD5相连,AD5(16位)的范围为0-65535,对应的电压为0-5V,相应的小球位置为0-400mm。
MatLab Simulink环境下的数据采集处理工具箱提供了强大的功能。
可以编写扩展名为mdl的图形文件,采集小球的位置信号,并进行数字滤波。
四、实验设备及仪器:1、球杆系统;2、计算机MATLAB平台;五、实验步骤:将MatLab主窗口的Current Directory文本框设置为球杆控制程序的系统文件夹;在MatLab主窗口点击进入Simulink Library Brower窗口,打开工具箱Googol Education Products\4. Ball & Beam\A. Data Collection and Filter Design,运行Data Collection and Filter Design程序,确认串行口COM Port为1后,双击Start Real Control模块,打开数据采集处理程序界面;已有的模块不需再编辑设置,其中Noise Filter1模块是专门设计的滤波器,用来抑制扰动。
请参考以下步骤完成剩余部分:1、添加、设置模块:添加User-Defined Functions组中的S-Function模块,双击图标,设置name为AD5;parameters为20.添加Math Operations组中的Gain模块,双击图标,设置Gain为0.4/65535.0.添加Sinks组中的Scope模块,双击图标,打开窗口,点击(Parameters),设置General 页中的Number of axes为2,Time Range为20000,点击OK退出,示波器屏成双;分别右击双屏,选Axes properties,设置Y-min为0,Y-max为0.4.2、连接模块:顺序连接AD5、Gain、Noise Filter1、Scope模块,完成后的程序界面如图所示:图1.1.1 完成后的数据采集处理程序界面点击运行程序,双击Scope模块,显示滤波前后的小球位置-时间图,拨动小球在横杆上往返滚动,可得如下实验结果:图1.1.2 小球位置的数据采集处理六、实验总结通过这个实验、我学会了球杆系统模型的建立以及小球位置的获取。
自动控制实验报告——球杆系统倒立摆bupt概要
球杆系统实验实验一小球位置的数据采集处理一、实验目的:学会用Simulink仿真与硬件连接并获得小球位置。
二、实验任务:1、在MatLab Simulink中通过添加功能模块完成球杆系统模型的建立;2、正确获得小球位置数据;三、实验原理:小球的位置通过电位计的输出电压来检测,它和IPM100的AD转换通道AD5相连,AD5(16位)的范围为0-65535,对应的电压为0-5V,相应的小球位置为0-400mm。
MatLab Simulink环境下的数据采集处理工具箱提供了强大的功能。
可以编写扩展名为mdl的图形文件,采集小球的位置信号,并进行数字滤波。
四、实验设备及仪器:1、球杆系统;2、计算机MATLAB平台;五、实验步骤:将MatLab主窗口的Current Directory文本框设置为球杆控制程序的系统文件夹;在MatLab主窗口点击进入Simulink Library Brower窗口,打开工具箱Googol Education Products\4. Ball & Beam\A. Data Collection and Filter Design,运行Data Collection and Filter Design程序,确认串行口COM Port为1后,双击Start Real Control模块,打开数据采集处理程序界面;已有的模块不需再编辑设置,其中Noise Filter1模块是专门设计的滤波器,用来抑制扰动。
请参考以下步骤完成剩余部分:1、添加、设置模块:添加User-Defined Functions组中的S-Function模块,双击图标,设置name为AD5;parameters为20.添加Math Operations组中的Gain模块,双击图标,设置Gain为0.4/65535.0.添加Sinks组中的Scope模块,双击图标,打开窗口,点击(Parameters),设置General 页中的Number of axes为2,Time Range为20000,点击OK退出,示波器屏成双;分别右击双屏,选Axes properties,设置Y-min为0,Y-max为0.4.2、连接模块:顺序连接AD5、Gain、Noise Filter1、Scope模块,完成后的程序界面如图所示:图1.1.1 完成后的数据采集处理程序界面点击运行程序,双击Scope模块,显示滤波前后的小球位置-时间图,拨动小球在横杆上往返滚动,可得如下实验结果:图1.1.2 小球位置的数据采集处理六、实验总结通过这个实验、我学会了球杆系统模型的建立以及小球位置的获取。
球杆控制实验系统开题报告
方案一:
超声波测距,超声波是一种超出人类听觉极限的声波即其振动频率高于20kHz的机械波。超声波测距的原理是根据超声波在空气中传播的反射原理,以超声波传感器为检测部件,应用单片机技术和超声波在空气中的时间差来测量距离。超声波测距仪在工作的时候就是将电压和超声波之间的互相转换,当超声波传感器发射超声波时,发射超声波的探头将电压转化的超声波发射出去,当接收超声波时,超声波接收探头将超声波转化的电压回送到单片机控制芯片,根据发射和接收的时间差,最终计算出超声波发生器到障碍物的实际 距离,完成测距,最后在LED显示电路中显示测量的距离。
[4]W:Pedrycz.Fuzzy Control and Fuzzy Systems[M],NY:Wiley,1 993,1 5—1 8
[5]SalvatoreS,Esposito E,Miller J.Ball&beam control system[J],IEEE Trans.onAutomaticControl,2002,30(3):376-388
基于上述理论分析和实际情况,电机驱动模块选用方案二。
四、研究工作进度:
序号
时间
内容
1
2015.11.10
任务下达
2
2015.11.10-2015.12.27
任务相关资料查阅
3
2015.12.28-2016.3.10
任务方案初步确定及设计
4
2016.3.11
开题报告会
5
2016.3.12-2016.4.14
方案二:
采用专用的电机驱动芯片,例如L298N、L297N等电机驱动芯片,由于它内部已经考虑到了电路的抗干扰能力,安全、可靠行,所以我们在应用时只需考虑到芯片的硬件连接、驱动能力等问题就可以了,所以此种方案的电路设计简单、抗干扰能力强、可靠性好。设计者不需要对硬件电路设计考虑很多,可将重点放在算法实现和软件设计中,大大的提高了工作效率。
球杆系统实验指导
目录球杆系统说明----------------------------------------------------------------- 31 系统简述--------------------------------------------------------------------------- 32 机械结构--------------------------------------------------------------------------- 53 电器部分--------------------------------------------------------------------------- 54 软件实现--------------------------------------------------------------------------- 6实验一球杆系统的数学模型---------------------------------------------------- 71.1 实验目的------------------------------------------------------------------------- 7 1.2 实验原理------------------------------------------------------------------------- 71. 传递函数------------------------------------------------------------------------------------------------ 92. 状态空间方程 ------------------------------------------------------------------------------------------ 9 1.3 实验内容------------------------------------------------------------------------- 9 1)、2)略--------------------------------------------------------------------------- 9 3)在MATLAB 中求取传递函数及其开环阶跃响应----------------------------------------- 101. 传递函数-----------------------------------------------------------------------------------------------102. 状态空间方程 ----------------------------------------------------------------------------------------- 113. 球杆系统在Simulink 下的模型建立 -------------------------------------------------------------- 11 1.4 实验设备------------------------------------------------------------------------ 14实验二球杆系统的数字P 控制器设计------------------------------------------ 152.1 实验目的------------------------------------------------------------------------ 15 2.2 实验原理------------------------------------------------------------------------ 15 2.3 实验设备------------------------------------------------------------------------ 16 2.4 实验内容------------------------------------------------------------------------ 16实验三球杆系统的数字PD 控制器设计---------------------------------------- 183.1 实验目的------------------------------------------------------------------------ 18 3.2 实验原理------------------------------------------------------------------------ 18 3.3 实验设备------------------------------------------------------------------------ 20 3.4 实验内容------------------------------------------------------------------------ 20实验四球杆系统的数字PID 控制器设计--------------------------------------- 214.1 实验目的------------------------------------------------------------------------ 21 4.2 实验原理------------------------------------------------------------------------ 21 4.3 实验设备------------------------------------------------------------------------ 22 4.4 实验内容------------------------------------------------------------------------ 22实验五根轨迹算法设计球杆系统控制器----------------------------------------- 245.1 实验目的------------------------------------------------------------------------ 24 5.2 实验原理及内容------------------------------------------------------------------ 24 5.3 实验设备---------------------------------------------------------------- 28实验六频率响应法设计球杆系统控制器----------------------------------------- 296.1 实验目的---------------------------------------------------------------- 296.2 实验原理及内容---------------------------------------------------------- 296.3 实验设备---------------------------------------------------------------- 33实验七球杆系统在Matlab Simulink 环境下的实时控制-------------------------- 347.1 实验目的------------------------------------------------------------------------ 34 7.2 实验原理------------------------------------------------------------------------ 34 7.3 实验设备------------------------------------------------------------------------ 41 7.4 实验内容------------------------------------------------------------------------ 41附:IPM MOTION实验程序使用说明--------------------------------------------- 42球杆系统说明1 系统简述球杆系统(Ball & Beam )是为自动控制原理等基础控制课程的教学实验而设计的实验设备。
球杆系统实验指导书主体
GBB 系列球杆系统实验指导书I 目录第1章 GBB 系列球杆系统说明........................................................................................................ - 1 -1.1 系统简述 ....................................................................................................................................... - 1 -1.2 系统组成 ....................................................................................................................................... - 1 -1.3 实验及特点 ................................................................................................................................... - 3 -第2章 球杆系统对象机构设计与装配实践 ..................................................................................... - 4 -2.1 实验目的 ....................................................................................................................................... - 4 -2.2 实验原理 ....................................................................................................................................... - 4 -2.3 实验设备 ....................................................................................................................................... - 6 -2.4 实验内容 ....................................................................................................................................... - 6 -第3章 球杆系统的创新结构设计实验 ............................................................................................. - 7 -3.1 实验目的 ....................................................................................................................................... - 7 -3.2 实验原理 ....................................................................................................................................... - 7 -3.3 实验设备 ....................................................................................................................................... - 8 -3.4 实验内容 ....................................................................................................................................... - 8 -第4章 小球直线位移测量实验和AD 转换 ..................................................................................... - 9 -4.1 实验目的 ....................................................................................................................................... - 9 -4.2 实验原理 ....................................................................................................................................... - 9 -4.3 实验设备 ..................................................................................................................................... - 10 -4.4 实验内容 ..................................................................................................................................... - 11 -第5章 角度位移测量实验-模拟方法(电位器) .......................................................................... - 12 -5.1 实验目的 ..................................................................................................................................... - 12 -5.2 实验原理 ..................................................................................................................................... - 12 -5.3 实验设备 ..................................................................................................................................... - 12 -5.4 实验内容 ..................................................................................................................................... - 12 -第6章 角度位移测量实验-数字方法(编码器) .......................................................................... - 13 -6.1 实验目的 ..................................................................................................................................... - 13 -6.2 实验原理 ..................................................................................................................................... - 13 -6.3 实验设备 ..................................................................................................................................... - 14 -6.4 实验内容 ..................................................................................................................................... - 14 -第7章 数字滤波分析 ....................................................................................................................... - 16 -7.1 实验目的 ..................................................................................................................................... - 16 -7.2 实验原理 ..................................................................................................................................... - 16 -7.3 实验设备 ..................................................................................................................................... - 18 -7.4 实验内容 ..................................................................................................................................... - 18 -第8章 直流伺服电机参数辨识实验 ............................................................................................... - 19 -8.1 实验目的 ..................................................................................................................................... - 19 -8.2 实验原理 ..................................................................................................................................... - 19 -8.3 实验设备 ..................................................................................................................................... - 20 -8.4 实验内容 ..................................................................................................................................... - 20 -第9章 直流伺服电机的调速控制实验 ........................................................................................... - 22 -9.1 实验目的 ..................................................................................................................................... - 22 -II 9.2 实验原理 ..................................................................................................................................... - 22 -9.3 实验设备 ..................................................................................................................................... - 23 -9.4 实验内容 ..................................................................................................................................... - 23 -第10章 直流伺服电机的位置控制实验 ......................................................................................... - 26 - 10.1 实验目的 ................................................................................................................................... - 26 - 10.2 实验原理 ................................................................................................................................... - 26 - 10.3 实验设备 ................................................................................................................................... - 27 - 10.4 实验内容 ................................................................................................................................... - 27 -第11章 测速发电机实验 ................................................................................................................. - 29 - 11.1 实验目的 ................................................................................................................................... - 29 - 11.2 实验原理 ................................................................................................................................... - 29 - 11.3 实验设备 ................................................................................................................................... - 30 - 11.4 实验内容 ................................................................................................................................... - 30 -第12章 智能伺服驱动器的使用与编程(计算机接口实验等) ................................................. - 31 - 12.1 实验目的 ................................................................................................................................... - 31 - 12.2 实验原理 ................................................................................................................................... - 31 - 12.3 实验设备 ................................................................................................................................... - 33 - 12.4 实验内容 ................................................................................................................................... - 33 -第13章 球杆系统的数学模型 ......................................................................................................... - 34 - 13.1 实验目的 ................................................................................................................................... - 34 - 13.2 实验原理 ................................................................................................................................... - 34 - 13.3 实验设备 ................................................................................................................................... - 38 - 13.4 实验内容 ................................................................................................................................... - 39 -第14章 球杆系统的数字P 控制器设计 ......................................................................................... - 40 - 14.1 实验目的 ................................................................................................................................... - 40 - 14.2 实验原理 ................................................................................................................................... - 40 - 14.3 实验设备 ................................................................................................................................... - 41 - 14.4 实验内容 ................................................................................................................................... - 41 -第15章 球杆系统的模拟P 控制器设计 ......................................................................................... - 43 - 15.1 实验目的 ................................................................................................................................... - 43 - 15.2 实验原理 ................................................................................................................................... - 43 - 15.3 实验设备 ................................................................................................................................... - 45 - 15.4 实验内容 ................................................................................................................................... - 45 -第16章 球杆系统的数字PD 控制器设计 ...................................................................................... - 46 - 16.1 实验目的 ................................................................................................................................... - 46 - 16.2 实验原理 ................................................................................................................................... - 46 - 16.3 实验设备 ................................................................................................................................... - 47 - 16.4 实验内容 ................................................................................................................................... - 47 -第17章 球杆系统的模拟PD 控制器设计 ...................................................................................... - 49 - 17.1 实验目的 ................................................................................................................................... - 49 - 17.2 实验原理 ................................................................................................................................... - 49 - 17.3 实验设备 ................................................................................................................................... - 50 - 17.4 实验内容 ................................................................................................................................... - 50 -GBB 系列球杆系统实验指导书III 第18章 球杆系统的数字PID 控制器设计 .................................................................................... - 51 - 18.1 实验目的 ................................................................................................................................... - 51 - 18.2 实验原理 ................................................................................................................................... - 51 - 18.3 实验设备 ................................................................................................................................... - 52 - 18.4 实验内容 ................................................................................................................................... - 52 -第19章 球杆系统的模拟PID 控制器设计 .................................................................................... - 54 - 19.1 实验目的 ................................................................................................................................... - 54 - 19.2 实验原理 ................................................................................................................................... - 54 - 19.3 实验设备 ................................................................................................................................... - 56 - 19.4 实验内容 ................................................................................................................................... - 56 -第20章 球杆系统在MATLAB SIMULINK 环境下的实时控制 ............................................... - 57 - 20.1 实验目的 ................................................................................................................................... - 57 - 20.2 实验原理 ................................................................................................................................... - 57 - 20.3 实验设备 ................................................................................................................................... - 63 - 20.4 实验内容 ................................................................................................................................... - 63 - 附录1 电路原理图 ............................................................................................................................ - 64 - 附录2 电气接线图 ............................................................................................................................ - 65 -GBB 系列球杆系统实验指导书- 1 - 第1章 GBB 系列球杆系统说明1.1 系统简述GBB 系列球杆系统是专为自动控制原理等基础控制课程的教学实验而开发、设计的实验设备,它是一个安全的开环不稳定物理系统,可以将许多抽象的控制概念通过物理学运动直观的表现出来,有趣而富有挑战性,因此特别适合于基础控制课程实验。
自动控制原理实验报告——球杆系统
自动控制原理实验报告——球杆系统一、实验目的1、了解自动控制中的反馈控制原理。
2、通过对球杆系统的建模,实现对球杆运动的自动控制。
3、了解PID控制器的基本原理及其参数调节方法。
二、实验器材1、单轴直线滚动导轨2、步进电机3、直流电机5、万用表6、电脑三、实验原理反馈控制是控制系统中的一种常见方法。
其工作过程是测量输出量,与设定值进行比较,然后用输出的误差信号来调整控制器,从而控制输入量,使输出量达到设定值。
这种工作方式的主要特点是能够在一定程度上处理外部干扰和系统变化。
2、控制对象球杆系统具有非线性和时变特点,建模时常用的方法是状态空间法,即用矩阵方程来描述系统的状态和动态特性,从而实现系统的控制。
其中,球杆系统的状态向量可以表示为:式中,α和θ分别表示球杆的角度和倾斜角度,u则是系统的输入。
3、PID控制器PID控制器是一种基本的反馈控制器,其主要特点是能够在一定程度上克服系统的非线性和时变性。
其控制策略是将误差信号经Proportional、Integral、Derivative三个环节处理后再输出控制信号。
具体来说,PID控制器的输出可以表示为:式中,e表示当前误差,T为采样时间,Kp、Ki和Kd分别为比例系数、积分系数和微分系数。
这些系数是PID控制器的重要参数,在控制实际物理系统时需要进行合理调节。
四、实验过程1、球杆系统建模根据上述原理,我们采用模型参数估计法,对球杆系统的状态方程进行求解和建模。
下图为球杆系统的实物模型:其中,Θ为球杆的倾斜角度,α为球杆相对于竖直方向的偏角。
此外,球杆的长度为L,质量为m,转动惯量为I。
考虑到系统的非线性和时变性,我们采用状态空间法进行建模,得到以下的状态方程:根据系统的动态特性,我们选择PID控制器进行调节,以使球杆系统达到平衡状态。
首先我们需要调节PID控制器的三个系数,通过试验寻找较为合适的值。
其中,Kp控制系统的快速性,Ki控制系统的稳定性,Kd则是控制系统的抗干扰性。
合肥工业大学自动控制理论综合实验球杆实验报告

实验一 球杆系统的数学模型实验目的l 掌握对实际物理模型的建模方法l 掌握在Matlab 中利用Simulink 等工具对系统进行模型分析的方法。
实验内容:1) 分析并推导系统的数学模型;2) 求解系统的状态空间方程和传递函数方程;在matlab 中建立一下m 文件并运行:m=0.028;R=0.0145;g=-9.8;J=0.4*m*R^2;a=-m*g/(J/R^2+m);A=[0 1 0 0;0 0 a 0;0 0 0 1;0 0 0 0] B=[0;0;0;1] C=[1 0 0 0] D=0[n,d]=ss2tf(A,B,C,D);G=tf(n,d); 返回:A = 0 1.0000 0 0 0 0 7.0000 0 0 0 0 1.0000 0 0 0 0B = 0 0 0 1C = 1 0 0 0D = 0Transfer function:-4.441e-016 s^3 + 1.998e-015 s^2 + 3.997e-015 s + 7 --------------------------------------------------- s^4上式即为传递函数方程。
3) 在Matlab 下建立系统的模型并进行阶跃响应仿真。
为得到阶跃响应,输入命令: step(G) 得到阶跃响应曲线如下:Step ResponseTime (sec)A m p l i t u d e实验二 球杆系统的数字P 控制器设计实验目的了解P 控制器原理及其对球杆系统的控制作用 实验原理:实验内容:1. 在matlab 下仿真比例控制时系统的响应情况。
在matlab 中建立m 文件并运行: m = 0.028; R = 0.0145; g = -9.8; L = 0.40; d = 0.045; J = 0.4*m*R^2;K = (m*g*d)/(L*(J/R^2+m)); %simplifies input num = [-K]; den = [1 0 0]; ball=tf(num,den) kp = 1;sys_cl=feedback(kp*ball,1) %建立闭环系统 step(0.25*sys_cl) %阶跃响应2. 进入BallBeamControl 应用控制程序进行实时控制;实验步骤如下:1) 让小球稳定在一个位置,设为200;2) 设置Kp=const(常数),Kd=0,Ki=0(拖动相应滑块到最低位置即为0); 3) 拖动小球目标位置滑块往右移动到需要位置,设置此处为300; 4) 松开鼠标即刷新参数,系统开始运动 5) 改变Kp 的值,观察响应变化Step ResponseTime (sec)A m p l i t u d e从结构可以看出,系统实际输出和matlab 仿真结果很相似,但是由于参数不一样,系统忽略了很多次要因素,而在实际系统中,这些因素又在起作用,所以有时候振幅会收敛(阻力),有时候发散9比例系数过大,并有迟延环节作用)(此处可能需要另外加图,以表示不同的kp 对系统的影响)实验三 球杆系统的数字PD 控制器设计实验目的掌握PD 控制器的控制原理和对球杆系统的控制效果 实验原理:实验内容:1、 在matlab 中仿真PD 控制器下球杆系统的响应情况。
球杆系统控制器设计实验报告(北京理工大学).
球杆系统控制器设计实验报告学院:自动化学院组号:5成员:球杆系统控制器设计实验一、实验目的和要求1.1 实验目的(1)通过本设计实验,加强对经典控制方法(PID控制器)和智能控制方法(神经网络、模糊控制、遗传算法等)在实际控制系统中的应用研究。
(2)提高学生有关控制系统控制器的程序设计、仿真和实际运行能力.(3)熟悉MATLAB语言以及在控制系统设计中的应用。
1.2 实验要求(1)每两人一组,完成球杆系统的开环系统仿真、控制器的设计与仿真以及实际运行结果;(2)认真理解设计内容,独立完成实验报告,实验报告要求:设计题目,设计的具体内容及实验运行结果,实验结果分析、个人收获和不足,参考资料。
程序清单文件。
二、实验内容本设计实验的主要内容是设计一个稳定的控制系统,其核心是设计控制器,并在MATLAB/SIMULINK环境下进行仿真实验,并在球杆实验平台上实际验证。
算法实现:设计模糊控制器控制球杆系统,达到要求目标。
三、实验原理3.1 球杆系统的特点球杆系统是一个典型的非线性系统,理论上而言,它是一个真正意义上的非线性系统,其执行机构还具有很多非线性特性,包括:死区,直流马达和带轮的传动非线性,位置测量的不连续性,导轨表面不是严格的光滑表面,产生非线性阻力,这些非线性因素对于传统意义上的测量和建模造成很大的影响,并对系统的控制性能造成非常大的影响,怎样去设计一个鲁棒的控制系统,是现代控制理论的一个重要问题。
因为系统机械结构的特点,球杆系统具有一个最重要的特性——不稳定性,对于传统的实验方法,存在一些实验的难处,不稳定的系统容易对实验人员产生危险或是不可预料的伤害,球杆系统相对而言,机械比较简单,结构比较紧凑,安全性也比较高,是一个可以避免这些危险和伤害的实验设备。
3.2 球杆系统的数学模型对小球在导轨上滚动的动态过程的完整描述是非常复杂的,设计者的目的是对于该控制系统给出一个相对简单的模型,如图3.1所示为实验使用球杆系统简化图。
球杆系统
球杆系统IPM MOTION STUDIO 控制实验班级姓名学号一、实验目的1、学习利用实验探索研究控制系统的方法;2、体会控制系统理论分析和实际控制效果之间的差异;3、采用PID算法设计球杆控制系统。
二、实验设备球杆系统三、实验步骤1、安装控制程序2、建立通讯打开计算机电源。
然后打开球杆系统的电源。
从“Start | Programs | IPM Motion Studio | IPM Motion Studio”菜单中运行IPM Motion Studio3、运行控制程序1)打开工程文件点击主窗口中的“Open Project”按钮“Open an Existing Project”窗口将显示“⋯\IPM MotionStudio\Projects” 目录下的IPM Motion Studio 应用程序. 双击“BallBeamProject” 打开控制程序.2)熟悉工程结构在窗口的主菜单中选择“View | Project”,它包含了控制系统的一些基本参数,包括、驱动器以及传感器等,作为一个相对独立的模块,点击其图标可以打开相应的参数设置界面。
如果我们需要建立一个新的工程,则需要根据实际系统的参数,对工程中的参数进行修改。
3)机械部分初始状态转动皮带轮,使得皮带轮的中心和支撑杆的中心线重合,即保持横杆右端处理最低的位置。
4)开始运行程序点击工具条上的“开始运行程序”按钮运行程序。
系统将把小球的位置平衡在目标位置上。
您可以给系统施加一定的干扰,如用手指沿着导杆拨动小球,松开手指后,控制系统将很快的恢复到平衡位置,并将小球稳定在平衡位置。
四、实验总结通过实验了解了球杆系统控制的方法和原理,通过实验了解了控制系统理论分析和实际控制效果之间的差异,也了解了如何采用PID 算法设计球杆控制系统。
球杆系统用户手册和实验指导书 V2.06

下转动,通过控制直流伺服电机的位置,带动皮带轮转动,通过传动机构就可 以控制横杆的倾斜角。
直流伺服电机带有增量式编码器(1000P/R),可以检测电机的实际位置, 在横杆上的凹槽内,有一线性的传感器用于检测小球的实际位置,两个实际位 置的信号都被传送给控制系统,构成一个闭环反馈系统。
3.2 在SIMULINK中建立球杆系统的模型
19
3.3 电气模型
24
3.4 控制结构
26
CHAPTER 4 示例实验
28
4.1 数据采集和处理
28
4.2 球杆系统的开环模型
30
4.3 球杆系统的PID控制
32
4.3.1 P控制
32
4.3.2 PD控制
35
4.3.3 PID控制分析
37
4.4 根轨迹控制
联系我们
总部 固高科技(香港)有限公司
香港九龍清水灣香港科技大學新翼大樓 3639 號 Room 3639, Annex Building, HKUST, Clear Water Bay, Kowloon, Hong Kong Tel.: (852) 2358 1033, (852) 2719 8310 Fax: (852) 2719 8399 .
系统的硬件和软件,对于深入理解球杆系统的操作方法很有帮助。 ♦ Chapter 2 — 开 始 使 用 — 引 导 用 户 按 步 骤 安 装 和 调 节 球 杆 系 统 , 在
MATLAB Simulink 环境下进行实验,以及接线方法等。 ♦ Chapter 3 —系统建模—介绍了球杆系统的建模方法以及控制系统的结构。 ♦ Chapter 4 —示例实验—提供了球杆系统的几个典型实验。 ♦ Chapter 5 —故障排除—提供了一些常见问题的解决方法。 ♦ 附录 A —介绍了在 IPM Motion Studio 环境下的操作步骤。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动控制综合实验2 实验指导书Part 1球杆系统GBB1004北京邮电大学自动化学院林雪燕2016.5.24前言自动控制是一门理论与实践并重的技术,在成功掌握了理论知识(经典控制、现代控制)的同时再配合做一些经典的自动控制实验,从而加深对自动控制的理解与掌握,为今后从事自动控制的设计和研究工作打下扎实的基础。
为了更好地配合理论教学,达到理论与实践完美的结合,将自动控制相关的实验独立设置成一门实验课:自动控制综合实验。
自动控制理论实验主要目的是通过实验进一步理解自动控制理论的基本概念,熟悉和掌握控制系统的分析方法和设计方法,掌握常用工程软件使用,如MATLAB、LabVIEW 等。
上学期开设的自动控制综合实验(1)主要内容为控制系统的Matlab/simulink 仿真和基于实验箱的硬件模拟,以电路系统为研究对象。
本学期开始的自动控制综合实验(2)的内容是基于典型控制理论实验设备(球杆系统和倒立摆系统),熟悉和掌握控制系统的分析和设计方法。
球杆系统机械简单,结构紧凑,安全性高,采用智能伺服驱动模块和Windows 程序界面,可用于教学或科研。
对于自动控制理论等课程来说,针对设备的非线性与不稳定性特点,设计有效的控制系统是项有意义的工作。
球杆系统要完成的实验有:实验一:小球位置的数据采集处理实验二:球杆系统的PID法控制实验三:球杆系统的根轨迹法控制实验四:球杆系统的频率响应法控制倒立摆是一个典型的不稳定系统,同时又具有多变量、非线性、强耦合的特性,是自动控制理论中的典型被控对象。
运用控制手段可使之具有一定的稳定性和良好的性能。
许多抽象的控制概念如控制系统的稳定性、可控性、系统收敛速度和系统抗干扰能力等,都可以通过倒立摆系统直观的表现出来。
倒立摆系统要完成的实验有:实验五:倒立摆的数学建模及稳定性分析实验六:倒立摆的状态反馈控制实验七:不同状态下状态反馈控制效果比较实验八:倒立摆的LQR 控制同学们完成实验后,要完成相应的实验报告,并及时提交。
实验报告内容包含实验名称、实验目的、实验内容、实验要求、实验原理、实验设备及仪器、实验步骤、实验结果及分析、问题回答、心得体会、附上必要的实验原程序。
成绩评定:考勤10+实验过程表现40+实验报告50=100 分图1 简介球杆系统机械简单,结构紧凑,安全性高,采用智能伺服驱动模块和Windows 程序界面,可用于教学或科研。
对于自动控制理论等课程来说,针对设备的非线性与不稳定性特点,设计有效的控制系统是项有意义的工作。
球杆系统主要由以下部分组成,如下图0-1所示:机械部分(包含直流伺服电机和电源):通过电机调整横杆的倾斜角,使小球稳定平衡在横杆的某一位置;智能伺服驱动:控制箱内的IPM100模块通过RS-232接口与计算机通讯,完成控制任务;计算机:在MatLab Simulink环境下设计控制算法,实现控制目标。
球杆系统采用电位计检测小球的位置,电位计安装在横杆上,小球位置对应的电压信号输送给IPM100智能驱动的AD转换器,如图0-2所示图0-2 小球的位置信号采集原理球杆系统的闭环控制系统结构图0-3如下:图0-3 系统控制结构直流马达通过一个减速皮带轮带动横杆运动,IPM100智能驱动器内部包一个PID 控制算法,用于控制电机的位置,PID控制器的参数已经调整,保证电机具有较快的响应并没有超调。
系统通过以下步骤来实现控制:i. 通过RS232下载控制程序到智能伺服驱动器的板载内部寄存器中。
ii. 电机编码器的信号和小球的位置信号每隔一定时间反馈给系统,(伺服时间可设置,默认为5ms)iii. 板载的DSP对下载的程序进行解码,然后计算根据反馈的位置信息和控制算法计算控制量。
iv. 计算得到的控制量被放大并通过IPM的电源驱动模块作用给电机。
v. 这样,通过控制电机的位置,使得小球在设定的位置保持平衡。
控制系统的流程图如图0-4所示:图0-4 控制程序流程图为了使小球稳定平衡在横杆的某一位置,首先应建立球杆系统的数学模型,然后对小球位置进行数据采集。
控制量的设计方法有PID法、根轨迹法、和频率响应法。
2系统建模1.1 球杆系统的数学模型球杆系统机械结构原理图如图1-1:图1-1 球杆系统机械结构连线(连杆和同步带轮的连接点与齿轮中心的连线)和水平线的夹角为θ(θ的角度存在一定的限制,在最小和最大的范围之间),它作为连杆的输入,横杆的倾斜角α和θ之间的有如下的数学关系:α=dθL(1)角度θ和电机轴之间存在一个减速比n=4的同步带,控制器设计的任务是通过调整齿轮的角度θ,使得小球在某一位置平衡。
小球在横杆上滚动的加速度如下式:J ..++⋅⋅α- 2 =0 (2)( m) rR2mg s i n m r(α)其中:小球在横杆上的位置r为输出已知小球的质量m = 0.11kg;小球的半径R = 0.015m;重力加速度g=9.8m/s2;横杆长L =0.4m;连杆和齿轮的连接点与齿轮中心的距离为d = 0.04m;小球的转动惯量J =2mRkg.m2。
假设小球在横杆上的运动为滚动,且摩擦力可以忽略不计。
5因为期望角度α在0︒附近,因此可以在0附近对其进行线性化,得到近似的线性方程:2=.. mgr =J α=( +m) R 2mgdθJL( +m)R 2(3)拉氏变换得:r (s)=mgd⋅10.72(4)θ(s) L(J +m) s sR 2球杆系统是一个典型的单输入单输出系统,其传递函数可以近似为一个两阶的积分器。
R(s)和θ(s)分别为系统输出(小球位置)和输入(齿轮角度)的拉氏变换。
开环系统的阶跃响应如图1-2 所示,可以看出,系统不稳定,需要对其实施闭环控制与添加校正器。
图1-2 球杆系统的开环响应1.2 伺服系统的数学模型图0-3中的直流伺服系统由电机、编码器和IPM100智能驱动组成,形成了内闭环,结构图如图1-3所示。
图1-3 闭环系统结构图设皮带轮的减速比为n,因为La 很小,因此简化可以得到:上式可以简化如下:其中,传递函数包含一个积分项1/s,具有积分的特性,通常Ra 、J和Tm都很小,伺服电机可以看作为一个积分器。
实验一小球位置的数据采集处理为正常运行下面的程序,应将MatLab主窗口的Current Directory文本框设置为球杆控制程序的系统文件夹, 如c:\\program file\ matlab\ 2010a \toolbox \googoltech\ ballbeam。
通过IPM Motion Studio和MATLAB采集小球的位置信号,以及对其进行数字滤波器的设计。
小球的位置通过电位计的输出电压来检测,它和IPM100的AD转换通道AD5 相连,AD5(16位)的范围为0-65535,对应的电压为0-5V,相应的小球位置为0-400mm。
一、MATLAB Simulink环境下的数据采集MATLAB的数据采集和处理工具箱提供了强大的数据采集功能,可以很方便的进行数据采集和处理的工作。
请参考以下步骤:1. 在Simulink中打开”Googol Educational Products”工具箱,打开“Ball&Beam\Control Demo\Ball&Beam Data Collection And Filter Design”演示程序。
确认串行口COM Port为1后,双击Start Real Control模块,打开数据采集处理程序界面,程序尚未完成:图2-1尚未完成的数据采集处理程序界面上面的模块不需再编辑设置,其中Noise Filter1模块是专门设计的滤波器,用来抑制扰动。
请参考以下步骤完成剩余部分:(1)添加、设置模块:✓添加User-Defined Functions组中的S-Function模块,双击图标,设置name为AD5;parameters为20.✓添加Math Operations组中的Gain模块,双击图标,设置Gain为0.4/65535.0. ✓添加Sinks组中的Scope模块,双击图标,打开窗口,点击(Parameters),设置General 页中的Number of axes为2,Time Range为20000,点击OK退出,示波器屏成双;分别右击双屏,选Axes properties,设置Y-min为0,Y-max为0.4.(2)连接模块:顺序连接AD5、Gain、Noise Filter1、Scope模块,完成后的程序界面如图2-2所示:图2-2 完成的数据采集处理程序界面图2-2 中各部分的意义如下:“S-Function”模块用于采集IPM100控制器的AD5通道的数值,“Gain ”模块用于转化AD5通道的数值为小球的实际位置(0-400mm),“Noise Filter1”为根据需要而设计的滤波器,点击“Scope”可以观测到滤波前后的差异,可以作为一个在MATLAB Simulink环境下的滤波器的设计与实时控制的实验。
2. 运行控制程序,使小球在横杆上滚动,可以得到如下图2-3的实验结果:图2-3 小球位置的数据采集处理二、实验内容1. 在MatLab Simulink中完成球杆系统的Data Collection And Filter Design模型并运行,拨动小球在横杆上滚动,得到数据采集及滤波的实验结果,交Data.mdl 图形文件。
2.建立球杆系统的simulink模型系统方程(2)、(3)式中包含r, d/dt(r), alpha, and d/dt(alpha),使用非线性函数模块来描述这些函数:1)在Simulink中打开一个新的模型:•从commonly used blocks中插入一个积分模块。
•在上面的积分模块右边再添加一个积分模块,并把两个模块连接起来。
•在连接线上加上"d/dt(r)"的注释,在连接线的附近双击就可以添加文字。
•从第二个积分模块的输出端画一条线,并标识为"r"•从commonly used blocks模块库中插入一个Out模块并和"r"信号线连接。
这就是系统的输出。
•更改"Out"的标识为"r"。
2)接下来插入一个包含向量[r d/dt(r) alpha d/dt(alpha)]的函数,输出为d/dt(r):•从user-defined functions模块库中插入一个Fcn模块,并把它的输出和第一个积分模块的输入相连。
•双击Fcn模块,修改函数如下:(-1/ (J/(R^2) +m))*(m*g*sin (u [3])-m*u [2]*(u [4]) ^2)此函数模块的输入为向量u,每个元素被指定u[1],u[2]等,设定u[1]=r,u[2]=d/dt(r), u[3]=alpha, u [4]=d/dt(alpha).•关闭对话框,改变Fcn模块的名称为"Ball-Beam Lagrangian Model",3)构造函数的输入向量u,它可以通过积分器的输出信号以及使用一个Mux 模块实现:•从commonly used blocks中插入一个Mux模块,并把其输出和Ball-Beam的输入相连。