宝马730Li2011倒车辅助系统全景摄像机系统标定
倒车摄像机和外部后视摄像机的校准
底盘号码:车辆: 7' / F02 / 四门车 / 740Li / N55 / 自动变速箱 / EUR 左座驾驶型 / 2012 / 11
系统版本: 2.34.8 数据版本: 2.34.0
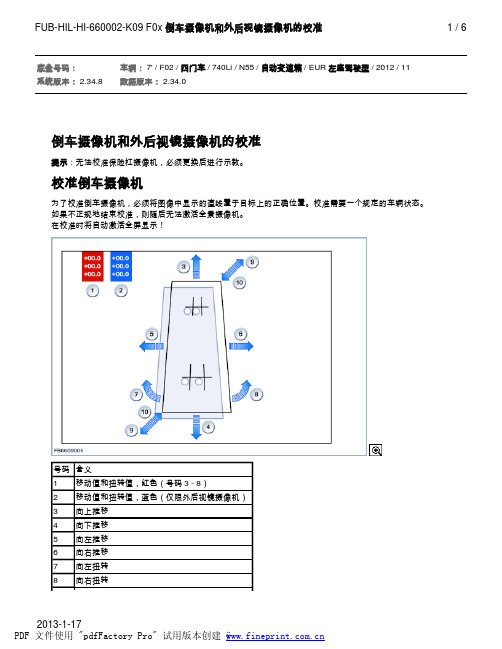
倒车摄像机和外后视镜摄像机的校准
提示:无法校准保险杠摄像机,必须更换后进行示教。
校准倒车摄像机
为了校准倒车摄像机,必须将图像中显示的直线置于目标上的正确位置。
校准需要一个规定的车辆状态。
如果不正规地结束校准,则随后无法激活全景摄像机。
在校准时将自动激活全屏显示!
为了校准外后视镜摄像机,必须根据车身的标记位置调整屏幕上显示的辅助线。
为此执行下列过程:
右侧外后视镜摄像机的校准
该图像与校准时的全视图一致。
校准结束时,显示的直线必须位于车辆边缘。
车轮直线必须指向前轮和后轮的中心。
2013-1-17
PDF 文件使用 "pdfFactory Pro" 试用版本创建ÿ。
高清倒车影像系统安装及调试细节说明
高清倒车影像系统安装及调试细节说明1. 前言本文档旨在提供关于高清倒车影像系统安装和调试的详细说明。
请按照以下步骤操作以确保顺利完成安装和调试过程。
2. 安装准备在开始安装之前,请确保您已经准备好以下材料和工具:- 高清倒车影像系统主机- 倒车摄像头- 电线和接线头- 螺丝刀- 夹子- 螺丝3. 安装步骤步骤1:选择安装位置选择一个合适的位置安装倒车摄像头,确保摄像头能够清晰地拍摄到车辆后方的景象。
步骤2:连接电线将倒车摄像头的电线与高清倒车影像系统主机的电源线相连。
确保电线连接牢固并没有松动。
步骤3:固定摄像头使用螺丝和螺丝刀将倒车摄像头固定在选择的安装位置上。
请注意,固定时应确保摄像头位置稳固,并且可以调整角度。
步骤4:连接显示屏将高清倒车影像系统主机的视频输出线与车辆显示屏相连。
确保连接正确,以确保倒车影像能够正常显示在显示屏上。
步骤5:完成安装检查所有连接是否正确并牢固。
确保没有松动的电线或松动的部件。
完成安装后,进行下一步调试。
4. 调试步骤步骤1:打开电源将车辆的电源打开,启动高清倒车影像系统主机。
步骤2:检查连接检查所有连接是否牢固。
确保摄像头和显示屏都正常连接。
步骤3:调整摄像头角度通过调整摄像头的角度,确保倒车影像清晰可见。
步骤4:测试倒车影像慢慢倒车并观察显示屏上的倒车影像。
确保影像清晰、稳定,并能准确反映车辆后方的情况。
步骤5:完成调试调试完成后,关闭高清倒车影像系统主机,并检查所有连接是否正常。
5. 结束语本文档提供了高清倒车影像系统安装和调试的详细说明。
请按照文档中的步骤进行操作,确保安装和调试过程顺利进行。
如有任何疑问或问题,请及时联系相关技术人员寻求帮助。
车载相机到车体的标定

车载相机到车体的标定引言车载相机是一种具有广泛应用前景的智能设备,它可以在汽车行驶过程中实时拍摄道路情况,帮助驾驶员判断交通情况、减少事故发生。
而车载相机的性能受限于其与车体的标定质量,因此车载相机到车体的标定技术至关重要。
本文将详细介绍车载相机到车体的标定技术与方法,旨在为相关领域的研究和应用提供参考。
一、车载相机到车体的标定技术概述1.1 车载相机标定的意义和作用车载相机的标定是指确定车载相机坐标系统与车体坐标系统之间的相对位置关系,以便将相机拍摄的图像转换为车体坐标系下的数据。
车载相机标定的准确性直接影响到车载相机的性能和精度,对于车载相机的定位、测距、导航等功能具有重要意义。
1.2 车载相机标定的挑战车载相机标定的挑战主要集中在以下几个方面:(1)车载相机的外部环境复杂多变,如光照、天气等因素会对标定的稳定性和精度造成影响;(2)车体结构不同,车载相机到车体的相对位置不同,需要根据具体车型进行针对性的标定;(3)标定数据量大、处理复杂,需要综合运用多种传感器和算法进行标定。
1.3 车载相机标定的研究现状目前,关于车载相机到车体的标定技术研究主要集中在以下几个方面:(1)基于视觉的标定方法,通过拍摄不同角度的标定板图像,利用相机标定算法计算相机内参和畸变参数,从而确定相机与车体之间的相对位置关系;(2)基于三维重建的标定方法,通过三维点云数据和车体特征点的匹配,实现车载相机到车体的标定;(3)基于传感器融合的标定方法,利用惯性传感器、全球定位系统等多传感器融合技术,综合解算车体姿态与车载相机位置,实现标定过程。
二、车载相机到车体的标定方法与算法2.1 基于视觉的标定方法基于视觉的标定方法是目前应用最为广泛的一种标定方法,其基本流程包括:首先摆放标定板,用车载相机拍摄标定板的图像,然后利用图像处理和相机标定算法得到相机的内外参数和畸变参数,最后根据相机参数计算出相机与车体之间的相对位置。
其中,相机的标定算法主要包括张正友标定法和Tsai标定法等。
【全面版】新款宝马加装全景泊车辅助系统倒车后视PPT文档
的远离可以提供清晰大角度的后视野,该系统大部分的后视摄像头均为全
钢外壳,这样防水和防碰撞的能力要强很多,也可以根据车型选择车型专
用的摄像头,这样安装起来更美观(大部分车主会选择安装在后 杠上)
;
宝马523加装凯立德导航--启动界面
宝马523加装凯立德导航--保留原车功能
宝马523加装凯立德导航--导航启动界面
宝马523加装全景泊车--前后加左边影像
宝马523加装凯立德导航--凯立德导航 新款宝马523安装凯立德导航+全景泊车辅系统 宝马523加装凯立德导航--导航启动界面 宝马523加装凯立德导航--保留原车功能 宝马523加装凯立德导航--凯立德导航 宝马523加装凯立德导航--保留原车功能 新款宝马523安装凯立德导航+全景泊车辅系统 宝马523加装全景泊车--倒车后视 宝马523加装凯立德导航--导航启动界面 宝马523加装凯立德导航--启动界面 宝马523加装全景泊车--倒车后视 宝马523加装凯立德导航--凯立德导航 要的是在任何时候,可以给您提供全面立体的车况和直观驾驶环境。 宝马523加装凯立德导航--导航启动界面 宝马523加装凯立德导航--启动界面 宝马523加装全景泊车--前后加左边影像 如何实现呢,前置摄像头可以通过广角影响,为您提供清晰大角度的前视野画面,一般安装在前 杠(也可以装在前挡风玻璃内侧), 后摄像头同样的远离可以提供清晰大角度的后视野,该系统大部分的后视摄像头均为全钢外壳,这样防水和防碰撞的能力要强很多, 也可以根据车型选择车型专用的摄像头,这样安装起来更美观(大部分车主会选择安装在后 杠上); 要的是在任何时候,可以给您提供全面立体的车况和直观驾驶环境。
宝马523加装全景泊车--前后加右边影像
宝马523加装凯立德导航+全景泊车辅助系统
宝马7系改装导航 加装轨迹倒车影像 升级地图效果图解

宝马7系改装导航加装轨迹倒车影像升级地图效果图解改装车型:宝马7系可加装功能介绍:1、触摸导航:导航功能为手写触摸操作,地图为凯立德或道道通的最新版本,地图内置固定电子眼信息。
2、倒车影像:安装无需打孔,在原车屏幕开启的状态下,挂倒档屏幕自动显示倒车画面。
170度广角,车尾情况一收眼底,并带有标尺线帮您参照。
3、六碟DVD:遥控器操作,台湾NECvox(耐傲视)品牌,车规专用机芯片。
优质的元器件,做工精细,体积小巧。
4、数字电视:遥控器操作,180MK高速移动设计,自动搜索存储。
高清完美视频还原。
一级城市可接收无线数字电视节目5-14个节目,内置3年免费资费。
5、硬盘播放器:遥控器操作,内置320G内存,可播放电脑上主流格式的音频、视频文件,带您步入数字娱乐时代。
安装硬盘播放器提供高品质车载音乐播放下载。
6、胎压监测:铁将军品牌,4S店信号频率,无线开关操作,原车屏幕显示。
7、后排头枕:后排娱乐系统,让您的家人在后座上不在枯燥。
8、行车记录仪:铁将军品牌,原车屏幕上显示。
9、雷达预警仪:汽车模型,可测流动和固定电子眼信息。
高速行驶必备。
10、夜视系统:夜郎星-暗夜卫士,豪华车的配置功能,微光成像,航道偏移提醒等高新技术。
宝马7系改装导航效果图宝马7系相关问题解答2011款宝马7系施坦威全球限量版伴随着行云流水般的钢琴声和曼妙优雅的芭蕾舞姿,BMW7系的施坦威全球限量版终于揭开神秘面纱,如约与中国消费者见面。
在中国发售的新BMW7系施坦威全球限量版搭载两款发动机,新BMW760Li施坦威全球限量版售价为人民币319.8万元,新BMW740Li施坦威全球限量版售价为人民币179.8万,两者差价140万。
宝马7系施坦威全球限740li i 量版由BMW Individual精心打造,细节之处由纯手工宝马740l施坦威全球限量版制作,每周仅生产两台,极具珍藏价值。
中国是宝马集团全球第三大市场,更是BMW7系第一大市场,而BMW7系在中国一直是顶级豪华车的领导先锋。
倒车摄像机系统校正

您测量的间距尺寸和高度现在必须输入到汽车 诊断、测量和信息系统 -VAS 5051A-中,单位 是“毫米”。 进行校准 在汽车诊断、测量和信息系统 -VAS 5051A-中 选择“引导功能” 或 在汽车诊断、测量和信息系统 -VAS 5051A-中 选择“引导型故障查询” – 在菜单“汽车选择”中选择相应的车辆数
校准倒车摄像机系统
校准倒车摄像机系统
汽车进行检修工作后可能需要重新校准倒车摄像机系统。单个情形 是这样的情况:
拆卸和安装倒车摄像机 -R189 更换倒车摄像机系统控制单元 -J772 在行李箱盖上进行事故维修工作后 车轮定位后 在前轴或后轴上进行维修后
准备工作
需要用到的专用工具、检测仪器以及辅助工具
据。 – 选择“倒车摄像机系统”。 – 选择“功能”。 – 选择“校准”。 从这里开始,在汽车诊断、测量和信息系统 VAS 5051A-的校准过程中继续引导。
页码,4/4
vw-wi://rl/A.zh-CN.A02.5102.59.wi::29430941.xml?xs6-12-3
校准倒车摄像机系统
– 记录读取到的数值。 – 在校准板的另一侧以相同的方式重复后车轮
测量过程。 两侧读取的间距值必须相同。 数值不一致: – 调校校准板,直到两侧上的数值一致。 调节校准板时注意,校准板的激光束继续照射 到 Audi 圆环中部上方,并且水平尺的显示器 保持在中部。必要时再校正。
– 将转向角传感器 -G85-置于 0 位置(车轮笔直)。
安装的测量装置一览
1 - 左侧桨状件 2 - 右侧桨状件 3 - 接收距离激光器
-VAS 6350/2-的 右角度
倒车影像校准方法
倒车影像校准方法:
步骤:
1、在两个后轮上放置专用工具V AS6350/1 桨状件,要求尽量靠近地面但是不要接触,要求桨状件可以自由摆动,注意不要将固定螺栓固定到车轮的防盗螺栓上
2、将V AS6350校准板水平放置在车后,并依据校准板上的水平仪调整到水平位置。
使用V AS6350/2 激光测距器将校准板两个前部测量点调整到据后轮桨状悬挂板距离为1.5m(1.2至1.6m,1.5m最好)此为尺寸A,在导航校准程序中按毫米值输入5051中,A=1500mm。
(辉腾此处数据为1700mm)如果在调整中校准板上的水平仪中的气泡偏离中心位置(也就是偏离水平位置)则需要重新调整到水平位置。
3、打开V AS6350上的激光发生器,要求激光束必须照射到后备箱大众徽标的正中位置。
此过程也要求校准板必须水平。
4、使用5051的故障导航或者功能导航:车身----电气-------倒车影像系统--------功能----------校准或调整:
在导航中需要输入的几项参数:
B:摄像头中心距地面距离。
调整时挂入倒档,摄像头伸出,用卷尺测量或者使用激光测距器测量。
H:校准板上部边缘距地面距离,单位:毫米。
校准板左侧有一个小孔,从小孔中进行测量,此为测量孔。
A:校准板距后轮上悬挂桨状板的距离,1500mm
5、执行校准。
校准中的注意事项:
1、校准中勿进入检测区域
2、在校准板上方不允许有直射在校准板上的强光,否则极易导致校准失败。
汽车全景标定方法

汽车全景标定方法汽车全景标定是指使用摄像头或传感器来获取车辆周围环境信息,用于驾驶辅助系统等应用中。
全景标定的目的是确定摄像头或传感器与车辆坐标系之间的准确对应关系,以便正确地显示和识别车辆周边的物体和道路信息。
以下是一种常用的汽车全景标定方法。
1.数据采集:首先需要收集一定范围内的车辆周围环境数据。
可以通过在车辆上安装多个摄像头或传感器来获取各个视角的数据。
较为常见的摄像头包括正前方、正后方、左侧、右侧等。
数据采集时应尽量涵盖不同的道路条件和车辆姿态,包括直行、转弯、加速、减速等情况。
2.数据处理:将采集到的车辆周围环境数据进行预处理。
首先,需要对图像进行畸变矫正,以去除镜头畸变引起的误差。
其次,还需要进行图像分割,将车辆周围的物体和道路分离出来,以便后续的标定操作。
图像分割可以通过深度学习算法进行。
3. 特征提取:从每个视角的图像中提取特征点,以便进行后续的标定计算。
特征点应该具有一定的稳定性,即能够在各种姿态下被准确提取出来。
常用的特征点提取算法包括Harris角点检测、SIFT特征点检测等。
4.标定计算:将各个视角的特征点进行匹配,以确定它们之间的对应关系。
在匹配过程中,通常会使用RANSAC算法来排除外点。
然后,使用标定方法(如最小二乘法)对这些对应关系进行拟合,从而得到摄像头或传感器与车辆坐标系之间的准确对应关系。
5.结果评估:对标定结果进行评估,以确定标定的准确度。
评估指标包括重投影误差、标定矩阵的平方范数等。
如果评估结果不理想,可以对数据采集和处理过程进行调整和优化。
总结:汽车全景标定方法是一项复杂而关键的工作,可以提高驾驶辅助系统的准确性和可靠性。
通过采集、处理、特征提取、标定计算和结果评估等步骤,可以得到摄像头或传感器与车辆坐标系之间的准确对应关系。
不同的汽车全景标定方法适用于不同的应用场景,未来还有更多的研究和改进空间。
倒车影像工作原理图解

倒车影像工作原理图解
倒车影像工作原理图解不要标题。
首先,倒车影像系统包括摄像头、显示器和控制模块。
摄像头安装在汽车的后部,通常是在车牌附近。
摄像头可以感知到车辆后面的情况,并将图像传输给控制模块。
控制模块接收摄像头传输的图像,并进行处理和分析。
它可以检测到障碍物、轨迹线和车辆的位置。
一旦检测到障碍物或轨迹线,控制模块会发出信号,显示器会显示摄像头传输的图像。
显示器一般安装在汽车的仪表板上或者后视镜上。
当控制模块接收到来自摄像头的信号后,显示器会显示该信号的内容,即摄像头捕捉到的实时图像。
通常,显示器会将图像分成不同的区域,以便驾驶员清晰地观察后方的情况。
当车辆倒车时,驾驶员可以通过观察显示器上的图像来了解后方的情况。
这样可以帮助驾驶员避免潜在的碰撞和事故,提高倒车的安全性。
控制模块和显示器通常会提供一些辅助功能,如距离提示线、声音警报等,以帮助驾驶员更好地判断距离和位置。
总之,倒车影像系统通过摄像头捕捉后方的图像,经过控制模块处理和分析后,将图像显示在显示器上,以帮助驾驶员倒车时更好地观察后方情况,提高倒车安全性。
使用元征X-431 PADⅢ进行2015年款宝马528Li全景摄像机系统标定和学习
使用元征X-431 PADⅢ进行2015年款宝马528Li全景摄像
机系统标定和学习
深圳市元征科技股份有限公司
【期刊名称】《汽车维修与保养》
【年(卷),期】2018(000)007
【摘要】实测车型一辆2015年款宝马528Li,VIN码:LBV5T3107FSJ7,使用元征X-431PADⅢ进行2015年款宝马528Li全景摄像机系统标定和学习。
2015款宝马528Li在倒车摄像机进行拆卸重新安装后出现故障码,需要使用元征X-431PADⅢ对系统进行重新标定。
【总页数】1页(P80)
【作者】深圳市元征科技股份有限公司
【作者单位】
【正文语种】中文
【相关文献】
1.使用元征X-431进行宝马X5_E53转向角传感器设码学习 [J], 深圳市元征科技股份有限公司
2.使用元征X-431 PAD Ⅲ进行2010款宝马730Li更换新TCM模块的操作方法[J], 深圳市元征科技股份有限公司
3.使用元征X-431 PAD Ⅲ进行2015年款宝马GT 528i更换行车高度模块设码[J], 深圳市元征科技股份有限公司
4.使用元征X-431PAD Ⅲ进行2015年宝马528Li全景摄像机系统标定和学习 [J],
深圳市元征科技股份有限公司
5.使用元征X-431 PRO3S进行2015款别克英朗节气门位置学习 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
如何正确使用倒车影像系统
如何正确使用倒车影像系统倒车影像系统是现代汽车安全辅助设备的一种,能够通过摄像头在驾驶员的后视镜或中控显示屏上实时展示车辆后方的情况,帮助驾驶员更加方便、准确地倒车。
然而,许多驾驶员并不熟悉如何正确运用倒车影像系统,因此本文将为您提供一些使用倒车影像系统的正确方法和注意事项。
首先,使用倒车影像系统前,请确保系统已经正确安装并能正常工作。
如果您不确定倒车影像系统是否正常运行,可以在驾驶座上打开系统测试功能进行检查。
同时,注意检查摄像头是否被污垢、雨水或其他物体遮挡,确保视野清晰。
在倒车之前,请务必将车辆的发动机启动,并挂入倒挡档。
倒车影像系统通常会在您挂入倒挡档时自动开启,并在倒车结束后自动关闭。
另外,倒车影像系统也可以通过按钮手动开关。
在倒车过程中,您可以根据需要调整显示屏上的亮度、对比度等设置,以确保影像清晰可见。
当倒车开始时,注意观察倒车影像系统上显示的图像。
通常情况下,倒车影像系统会在显示屏上以广角视角展示车辆后方的情况,帮助您更好地判断距离和障碍物位置。
然而,由于广角视角的缘故,倒车影像系统中的物体会显得比实际更远,这一点需要特别注意。
因此,在倒车过程中,一定要对显示屏上的影像进行适当的估计和判断,不仅依赖于倒车影像系统的显示。
此外,在使用倒车影像系统时,一定要保持注意力集中,并时刻注意周围环境。
倒车影像系统能够提供倒车视野,但并不能替代驾驶员对后方情况的观察。
在倒车时,时刻注意后方的行人、车辆和其他障碍物,特别是盲区区域。
倒车时,您可以结合倒车影像系统和后视镜进行综合观察,避免潜在的安全风险。
最后,使用倒车影像系统时,要遵守道路交通法规和安全驾驶原则。
不要将倒车影像系统用于非法、危险的行为,如违法倒车、超速倒车等。
倒车影像系统虽然能够提供帮助,但驾驶员的安全驾驶行为才是确保行车安全的关键。
总结起来,正确使用倒车影像系统需要确保其正常工作,注意倒车时的视野估计和观察,保持注意力集中,并遵守交通法规和安全驾驶原则。
汽车全景标定方法
汽车全景标定方法一、引言汽车全景标定是指在自动驾驶或辅助驾驶系统中,通过对车辆周围环境进行准确的感知和标定,以提供精确的数据支持和定位信息。
全景标定的准确性对于自动驾驶系统的安全性和性能至关重要。
本文将介绍汽车全景标定的方法和技术。
二、摄像头标定汽车全景标定中最重要的是对摄像头进行标定。
摄像头标定的目的是确定摄像头的内部参数和外部参数,以便准确地获取图像信息并进行后续处理。
常见的摄像头标定方法有以下几种:1. 标定板法:通过放置一个已知尺寸和形状的标定板,利用图像处理算法识别标定板上的特征点,然后根据特征点的像素坐标计算出摄像头的内外参数。
2. 特征点法:使用具有明显特征点的场景或物体作为标定对象,通过提取特征点并与实际测量值进行比对,计算出摄像头的内外参数。
3. 视觉里程计法:通过分析车辆在行驶过程中的视觉信息,结合惯性传感器和里程计数据,推算出摄像头的内外参数。
三、雷达标定除了摄像头标定,雷达的标定也是汽车全景标定中的重要环节。
雷达标定的目的是确定雷达的位置和方向,以及雷达的探测范围和精度。
常见的雷达标定方法有以下几种:1. 静态标定法:将雷达固定在一个已知位置,然后通过扫描周围环境并记录雷达返回的数据,从而确定雷达的内外参数。
2. 动态标定法:将雷达安装在车辆上,然后通过车辆在行驶过程中对周围环境的扫描,结合车辆的姿态和运动信息,计算出雷达的内外参数。
四、传感器融合传感器融合是汽车全景标定中的关键步骤。
通过将不同传感器的数据进行融合,可以提高感知和定位的准确性。
常见的传感器融合方法有以下几种:1. 滤波方法:通过卡尔曼滤波或粒子滤波等方法,将不同传感器的数据进行融合,并根据数据的权重进行加权平均,得到最终的感知和定位结果。
2. 融合算法:通过将不同传感器的数据进行融合,并利用数据的相互关系进行信息融合,从而提高感知和定位的准确性。
五、实时标定在实际应用中,汽车全景标定需要实时进行。
这是因为车辆和环境的状态会随着时间的推移而变化,因此需要对标定参数进行实时更新和校正。
宝马4S维修站经典案例专辑(八)——宝马新7系F02 740Li视频系统故障检修1例
宝马4S维修站经典案例专辑(八)——宝马新7系F02740Li视频系统故障检修1例张全【摘要】一辆2009年4月生产的宝马740Li轿车,其车型系列为F02,底盘号为C323293,搭载N54发动机,已行驶19479km。
rn1故障现象rn客户抱怨这辆车在怠速时,按下中央控制台上摄像机按钮,组合仪表左下部信息中心立即出现红色摄像机图案,并伴有相应的文字提示信息:侧视摄像机功能异常。
同时,仪表板中央信息显示器CID显示:【期刊名称】《汽车电器》【年(卷),期】2011(000)009【总页数】3页(P33-35)【关键词】宝马新7系;故障检修;视频系统;维修站;中央控制台;信息显示器;专辑;案例【作者】张全【作者单位】石家庄市宝马汽车维修站,河北石家庄050041【正文语种】中文【中图分类】U463.99一辆2009年4月生产的宝马740Li轿车,其车型系列为F02,底盘号为C323293,搭载N54发动机,已行驶19479km。
1 故障现象客户抱怨这辆车在怠速时,按下中央控制台上摄像机按钮,组合仪表左下部信息中心立即出现红色摄像机图案,并伴有相应的文字提示信息:侧视摄像机功能异常。
同时,仪表板中央信息显示器CID显示:侧视摄像机故障!不能正常显示视觉盲区的影像!驻车时注意。
如有机会,请尽快到BMW维修站进行检查。
2 故障诊断2.1 故障现象确认据客户讲述:这辆车左后部最近曾发生过追尾事故,修复后,便出现上述故障。
着车后,按下摄像机按钮,此故障就会出现,故障频率比较频繁。
检查车辆相关功能,确定完整的故障现象。
发动着车,按下中央控制台上摄像机按钮,组合仪表和CID立即同时出现上述故障提示信息。
着车时,将档位挂入R档,按下中央控制台上PDC按钮,CID正常显示倒车摄像机相关的影像信息。
检查CID其它相关功能,发现视频系统中电视功能部分失效:播放电视节目时,车辆扬声器中有相应的电视声音,但是,播放所有电视节目时,中央信息显示器CID都始终显示蓝屏,而CID的其它视频功能却能够正常显示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2011年宝马730Li全景摄像机系统标定 实测车型:2011年宝马730Li,VIN码:WBAKB2107BC68****,如下图;
功能说明:拆卸和安装/更换倒车摄像机,以及对车尾的车身和后备箱维修修整后,必须执行倒车摄像机的标定。
操作指引:
1).进入“TRSVC(全景摄像机)”系统,如图1;
图1 2).选择“特殊功能”,如图2;
图2
3).点击“全景摄像机系统标定和学习”,如图3;
图3
4).阅读标定信息提示,点击“确定”,如图4;
图4
5).满足标定条件后点击“确定”,如图5;
图5
6).如果更新了其中一个全景摄像机,则必须重新自适应该摄像机,点击“确定”,
如图6;
图6
7).点击“确定”开始标定,如图7;
图7
8).提示安装摄像机的自适应可能需要长达5分钟,如图8;
图8
9).安装在车辆中的所有摄像机已成功学习,点击“确定”,如图9;
图9
10).此全景摄像机不再需要用目标进行手动标定,在后台运行自动标定,并在行驶
时自动标定该系统,点击“确定”,如图10;
图10
11).标定完成,点击“确定”,如图11;
图11
声明:
该文档内容归深圳市元征科技股份有限公司版权所有,任何个人和单位不经同意不得引用或转载。