无人机中嵌入式系统方案设计
无人机中嵌入式系统方案设计
无人机中嵌入式系统方案设计(总11页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--无人机嵌入式系统设计—嵌入式系统原理与设计报告班级:姓名:学号:一、无人机功能需求分析1)无人机是一种由动力驱动、机上无人驾驶、可重复使用的航空器的简称,可以简单地分为军用和民用两大类,在这两个领域可以说非常火热。
2)在军事领域,无人机的最大优势体现在能够)执行3D 任务(即,Dull(枯燥乏味)、Dirty(恶劣环境)、Dangerous(危险)),这些任务可以细分为空中侦察、目标搜索及定位、炮兵校射、激光照射、战场观察和毁伤评估、通讯中继、大范围搜救、电子战、对地攻击、导弹拦截、战场物资补给及运送、空中格斗等。
3)在民用领域,无人机价格相对低廉,应用领域包括航拍、植保、地质勘探、高压输电线路巡检、油气管路巡查、高速公路事故管理、森林防火巡查、污染环境勘察、反恐维稳、公安执法、应急救援与救护、抢险救灾、海岸线巡查等。
二、无人机组成原理无人机可主要有固定翼无人机、无人直升机和多旋翼无人机三大平台,其它小种类无人机平台还包括伞翼无人机、扑翼无人机和无人飞船,这里主要分析下微小型四旋翼无人机。
1)由于微型无人机飞行姿态多变,为了增大无人直升机的带载能力,该无人机采用了四旋翼的机械结构,通过机载导航系统控制使其各旋翼之间协调运动,实现四旋翼无人机的飞行姿态自动调整,可按要求完成垂直起落控制、空中悬停控制、偏航控制、滚转控制、俯仰控制等多种动作及任务。
四旋翼无人机在各种结构特征参数确定的情况下,通过改变旋翼转速来改变拉力。
四旋翼飞行器结构简图及受力分析2)四翼无人机系统需要微型螺旋仪、加速速传感器、大气压传感器、电机转子转速测量单元和GPS接收单元。
机载控制部分主要由控制系统核心模块、惯性测量单元模块IMU(Inertial Measurement Unit)、压力传感器模块、无线部分(无线控制信号接收模块、无线数据传输模块、全球定位系统模块、无线视频传输模块)、电机控制部分(电机驱动控制模块、电机转子转速测量模块)以及红外距离传感器模块等组成。
高性能嵌入式计算技术在无人机系统中的使用教程
高性能嵌入式计算技术在无人机系统中的使用教程无人机系统在各个行业的应用越来越广泛,无论是军事侦察还是民用航拍,都离不开高性能嵌入式计算技术的支持。
本篇文章将介绍高性能嵌入式计算技术在无人机系统中的使用教程,包括无人机系统的组成部分、嵌入式计算的优势以及如何应用这些技术提升无人机系统的性能和功能。
一、无人机系统的组成部分无人机系统由无人机主体、遥控器、图传系统和地面站等组成。
其中,无人机主体包括飞行控制器、传感器和执行器。
飞行控制器是无人机的大脑,负责飞行的控制和姿态稳定,传感器负责获取周围环境信息,执行器负责转化电信号为动力输出。
嵌入式计算技术主要应用于飞行控制器和图传系统等关键模块,为无人机系统的高性能提供支持。
二、嵌入式计算技术的优势1. 高性能和低功耗:嵌入式计算技术采用先进的芯片设计和优化算法,能够在保证高性能的同时保持低功耗。
这对于无人机系统而言非常关键,可以延长飞行时间、提升飞行稳定性和响应速度。
2. 强大的图像处理能力:无人机系统中的图传系统需要实时传输和处理图像信息,嵌入式计算技术可以提供强大的图像处理能力,包括实时视频解码、图像特征提取和目标识别等。
这为无人机的航拍、监控和作战等应用提供了技术支持。
3. 可编程性和扩展性:嵌入式计算技术具有良好的可编程性和扩展性,可以根据不同应用需求进行定制化设计。
无人机系统中的各个模块都可以根据实际需求进行开发和定制,增加系统的灵活性和适应性。
三、使用教程1.选择合适的嵌入式计算平台:根据无人机系统的需求和性能要求,选择合适的嵌入式计算平台。
常见的嵌入式计算平台有NVIDIA的Jetson系列、英特尔的上位机计算机、ARM的Cortex-A系列等。
在选择平台时需要考虑计算性能、功耗、扩展性和可靠性等因素。
2.配置嵌入式计算模块:根据选择的嵌入式计算平台,配置相应的嵌入式计算模块。
嵌入式计算模块一般包括主控芯片、内存、存储器、图像处理单元等。
根据实际需求和性能要求,可以选择合适的模块配置。
嵌入式智能系统在无人机控制中的应用研究
嵌入式智能系统在无人机控制中的应用研究第一章引言1.1 研究背景随着科技的不断发展和社会的进步,无人机作为一种新型的航空器,已经广泛应用在农业、物流、安全与救援等领域。
然而,无人机的飞行控制对于实现高精度、高可靠性和高稳定性依然是一个巨大挑战。
嵌入式智能系统成为无人机控制领域研究的重点之一,通过将智能算法与嵌入式系统相结合,可以提升无人机的飞行性能和安全性。
1.2 研究目的和意义本研究旨在探讨嵌入式智能系统在无人机控制中的应用,研究嵌入式智能系统的相关技术,设计并实现一种具有较高精度、可靠性和稳定性的无人机控制系统。
研究成果可为无人机控制技术的发展提供理论基础和实践指导。
第二章嵌入式智能系统的概念与特点2.1 嵌入式系统的概念与分类嵌入式系统是指集成了计算机技术与电子技术的特定功能系统,常常应用于对硬件资源有限制的场合。
根据应用领域和工作环境的不同,嵌入式系统可以分为工控嵌入式系统、网络嵌入式系统、智能嵌入式系统等。
2.2 智能算法的概念与分类智能算法是一类模拟生物、认知或群体智能的数学模型和方法。
常见的智能算法包括遗传算法、人工神经网络、模糊逻辑、粒子群算法等。
这些算法可以通过学习和优化来适应复杂环境并完成特定的任务。
第三章嵌入式智能系统在无人机控制中的应用3.1 嵌入式智能系统的设计与实现无人机的飞行控制需要精确的姿态测量和控制。
嵌入式智能系统可以实时获取和处理传感器数据,并通过智能算法实现姿态控制。
本章将介绍嵌入式智能系统的设计原理、硬件配置和软件开发流程。
3.2 嵌入式智能系统在无人机导航中的应用无人机的导航是保证飞行安全和精度的关键环节。
嵌入式智能系统可以综合利用导航传感器数据和地图信息,实现无人机的航迹规划和位置控制。
本章将重点介绍嵌入式智能系统在无人机导航中的应用方法和技术。
3.3 嵌入式智能系统在无人机避障中的应用无人机在复杂环境下飞行时需要避免障碍物的干扰和碰撞。
嵌入式智能系统可以通过感知模块获取障碍物信息,并通过智能算法生成避障策略。
无人机中嵌入式系统方案设计
无人机中嵌入式系统方案设计一.无人机功能需求分析1.无人机的应用;无人机即无人驾驶飞机,是机上没有驾驶员,靠程序控制自动飞行或者由人在地面或母机上进行遥控的飞机。
无人机的应用包括军事应用、民事应用和消费级三方面。
军事应用包含空中侦察和空中格斗等方面;民事应用包括天气预报、森林火警监控、重大灾难抢险、航空测量等方面;而消费级包含航拍、游戏等休闲用途。
2.无人机的功能定义。
无人机的功能包括飞行模式切换功能、数据采集功能、姿态解算与控制计算功能、与导航及地面站的通信功能、控制输出功能等。
二.无人机组成原理研究1.机械结构;合理力流结构、减小应力集中结构和使载荷平衡结构等。
2.需要哪些传感器;需要角速率、姿态、位置、加速度、高度和空速等传感器。
3.需要哪些执行机构;容错飞行控制系统、自动混合加油系统、姿态控制系统等。
4.需要什么样的计算机系统;无人机装有程序控制系统、遥控与遥统、自动导航系统、自动着陆系统等,通过这些系统实现远距离控制飞行。
5.各组成部分之间的关联等。
通过嵌入式系统控制硬件模块,发挥其对应的功能。
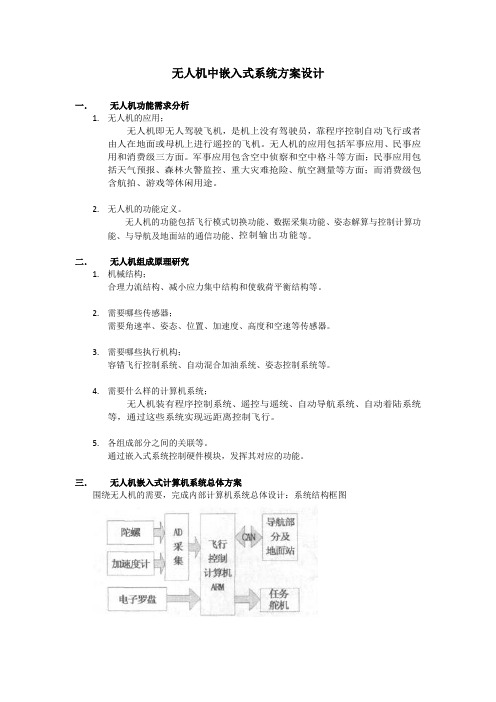
三.无人机嵌入式计算机系统总体方案围绕无人机的需要,完成内部计算机系统总体设计:系统结构框图四.无人机嵌入式计算机系统硬件方案设计1.硬件系统结构;2.关键部件(CPU、存储器、控制器、通讯等)选型;控制接口设计等等;CPU:Cortex-M0 M051系列存储器:64 KB的闪存存储器控制器:通信:OFDM(信道编码的正交频分复用)全数字调制解调技术及MPEG2/MPEG4数字压缩编码技术控制接口设计:3.环境适应性的要求。
主要有霉菌、盐雾、高温、潮湿等影响因素。
霉菌方面需要选用抗霉性能好的材料和零部件;表面用涂料保护;进行防霉结构设计。
盐雾方面需要在满足金属构件质量轻、强度高、耐热、耐磨等前提下,选用盐雾防护能力强的材料。
潮湿和高温方面需要选择耐高温、抗老化的材料。
五.无人机嵌入式计算机系统软件方案设计1.是否需要操作系统;无人机不需要操作系统。
飞行器中的嵌入式控制系统设计研究
飞行器中的嵌入式控制系统设计研究在飞行器的制造过程中,嵌入式控制系统设计是一个至关重要的环节。
该控制系统是将飞行器的各种元件和部件紧密地结合起来,使其能够高效运行的核心。
因此,如何设计一套符合要求的嵌入式控制系统,对于飞行器的制造工作至关重要。
一、嵌入式控制系统设计的基本原则任何一套嵌入式控制系统的设计都要遵循几个基本原则。
首先,系统的性能必须稳定、可靠,能够保证飞行器高效安全的运行。
其次,系统必须能够满足不同飞行场景的需求,能够适应不同的高度、速度等飞行要素。
最后,紧密结合人机工程学原理,为飞行员提供直观、准确、方便的操作方式。
二、嵌入式控制系统的设计流程实际上,一套嵌入式控制系统的设计过程是一个十分繁琐的工作。
按照设计流程,可以分为需求分析、系统设计、详细设计、系统实现、系统测试、系统维护等几个具体步骤。
需求分析阶段是整个设计过程中最为重要的一环。
在这一阶段,需要对飞行器的各种功能进行准确描述,明确控制系统的各种要求和限制。
同时,要做好需求变更的预备工作,避免后期设计中遭遇额外困难。
系统设计阶段是对需求分析阶段的进一步细化和明确。
需要设计系统的结构和架构,进行模块划分和模块间的接口设计。
同时,要考虑系统的安全性,避免因设计缺陷造成安全漏洞。
详细设计阶段是将系统设计中的具体要素和细节进行落实和完善。
在这一阶段,需要进行各种算法的优化,精细化的系统架构设计,以及各种不同模块的细节设计。
同时,需要做好系统兼容性考虑,确保设计出来的系统兼容各种不同的硬件和软件。
系统实现阶段是将设计的理论指令转变为实际的代码运行环境。
在这一阶段,需要进行软件编码和硬件设计,实现各种算法、接口和控制逻辑等。
设计人员需要进行严格的测试和验证,确保系统实现的正确性和稳定性。
系统测试阶段是整个过程中的必要环节。
该阶段主要针对设计的缺陷进行验证和修复。
同时,还需要对系统的性能进行评估和完善。
各种测试的结果必须要严格记录和归档,为后期维护工作提供依据。
嵌入式无人机系统的设计与实现

嵌入式无人机系统的设计与实现无人机在当今的社会中已经成为了一个备受瞩目的技术,不论是从娱乐领域中可玩性的提高,还是对于军事、民用等领域的极大帮助和重要作用,都让人们对无人机有着越来越高的期望。
而在无人机中,嵌入式无人机系统的设计与实现则成为了挑战和机遇并存的领域。
本文将会对嵌入式无人机系统的设计与实现进行探讨,分析其特点和难点,并提供解决方案和实现思路,希望为嵌入式无人机系统的研究提供有价值的思路和参考。
嵌入式无人机系统的特点嵌入式无人机系统的设计与实现与传统的无人机系统相比,其有着一些独特的特点和需求。
首先,其需要具备良好的可靠性和稳定性,否则其将会给使用者和周围环境带来极大的风险和危害。
其次,其对于计算和存储能力也有着相当高的要求,需要对于系统的性能和功耗等方面都进行深入的研究和开发。
另外,在嵌入式无人机系统的设计与实现中,还需要对于无线通信和传感器的应用和处理进行完善的技术支持和研究,进一步提高其在多样化应用场景中的可用性和拓展性。
嵌入式无人机系统的难点嵌入式无人机系统的设计与实现过程中,也存在着一些难点和需要攻克的技术难题。
其中,最重要的或许是如何进行系统的低功耗和高性能优化。
由于无人机系统的工作效率和可靠性直接与电池的寿命有着紧密的联系,为了让系统长时间稳定地运行,低功耗成为了嵌入式无人机系统开发者的头号问题。
而与此同时,嵌入式无人机系统的强大计算和处理需求也需要超高性能的支持,如何优化和平衡两者成为了技术上的一个难点。
另外,嵌入式无人机系统的小尺寸、高集成度、多样化功能等特点也意味着其需要在系统的设计和组装阶段进行深入的考虑和研究。
嵌入式无人机系统各个功能模块、传感器、通讯模块等的组合和调试也需要仔细考虑,以确保系统的性能、平衡和可维护性,从而使得整体的飞行过程更加安全和可靠。
解决方案和实现思路在嵌入式无人机系统的设计与实现中,有一些解决方案和具体的实现思路可以帮助开发者规避这些难点和瓶颈。
基于嵌入式开发的四旋翼无人机系统设计

基于嵌入式开发的四旋翼无人机系统设计乔梦甜;冀保峰;吴文乐;范世朝;李鹏【摘要】The paper introduces a micro quadrotor uav based on STM32F106 ZET6. The main hardware circuit includes minimum system, dc motor drive, NRF24 L01 based on 2. 4 GHz, six-axis attitude acquisition and humancomputer interaction module. Various attitude of air frame is transmitted back to the ground by wireless communication module and the flight attitude of uav is controlled in real time by remote control. For software algorithm, the attitude collection array is solved by quaternion method and rotation matrix to obtain the flight attitude of the fuselage.Then, the cascade PID algorithm is adopted to minimize the system error, so as to achieve the purpose of accurate data processing and realize the stable flight of uav.%本文研究了基于STM32F106ZET6嵌入式开发板的微型四旋翼无人机, 主要硬件电路包括最小系统、直流电机驱动、基于2. 4 GHz的NRF24L01无线通信、六轴姿态传感器以及人机交互模块.依靠无线通信模块将机身的各种姿态传输回地面, 并通过遥控器实时控制无人机的飞行姿态.在软件算法上, 将姿态数组通过四元数解法和旋转矩阵, 获得机身的飞行姿态.然后通过串级PID, 将系统误差最小化, 达到准确处理数据的目的, 实现无人机的稳定飞行.【期刊名称】《山西电子技术》【年(卷),期】2019(000)002【总页数】4页(P20-23)【关键词】STM32;NRF24L01;姿态解算;串级PID;电机驱动【作者】乔梦甜;冀保峰;吴文乐;范世朝;李鹏【作者单位】河南科技大学,信息工程学院,河南洛阳 471023;河南科技大学,信息工程学院,河南洛阳 471023;电子科技大学,航空航天学院,四川成都 611731;河南科技大学,信息工程学院,河南洛阳 471023;河南科技大学,信息工程学院,河南洛阳471023;河南科技大学,信息工程学院,河南洛阳 471023【正文语种】中文【中图分类】TP18;TP273.30 前言依托方便的人机交互功能,目前无人机技术涉及的范围极广。
无人机的嵌入式系统设计与开发实践
路径规划算法
采用基于图搜索、基于细胞自动机 、基于遗传算法等路径规划算法, 实现无人机在复杂环境中的自主导 航。
实时决策与避障
通过计算机视觉和深度学习技术, 实现障碍物的识别和避障,提高无 人机的安全性和自主性。
无人机传感器数据融合
多传感器数据融合
将不同类型和不同来源的传感器数据进行融合,如GPS和IMU的数据融合,以提高无人机的定位和姿 态测量的准确性和稳定性。
持,提高农业生产效率。
案例二:无人机在救援领域的应用实践
要点一
总结词
要点二
详细描述
搜救、应急救援、物资运输、灾后评估
无人机在救援领域的应用实践涵盖了搜救、应急救援、物 资运输以及灾后评估等多个方面。在灾难发生后,无人机 可以快速到达现场进行搜救和应急救援,同时还能运输物 资和进行灾后评估,帮助救援团队更好地了解灾情和制定 救援方案。
数据去噪和滤波
采用滤波器和降噪算法,如卡尔曼滤波器和自适应滤波器,去除传感器数据中的噪声和干扰,提高数 据的质量和可靠性。
无人机通信与遥控技术
1 2 3
无线通信技术
采用2.4GHz和5.8GHz等无线通信技术,实现无 人机与遥控器之间的信号传输和控制指令的发送 。
图像传输技术
通过无线图像传输模块,将无人机的拍摄画面实 时传输到遥控器或地面站,方便飞行员进行远程 操控和监视。
介绍不同类型无人机的硬件平台 ,包括固定翼、多旋翼、无人直 升机等,及其特点和应用场景。
无人机硬件组成
详细描述无人机硬件平台的组成 ,包括机体结构、飞行控制模块 、传感器模块、通信模块、电源 模块等。
无人机感器选型与配置
传感器类型与选型
介绍常用传感器类型,如惯性测量单元(IMU)、全球定位系统(GPS)、高度计、摄像头等,及其选型原则和 考虑因素。
基于嵌入式无人机实训报告(一)

基于嵌入式无人机实训报告(一)基于嵌入式无人机实训报告介绍本实训旨在通过嵌入式技术,设计一款可自主飞行的无人机。
实训内容1.嵌入式系统的设计2.电机驱动控制3.直升机平衡控制4.通信模块的设计嵌入式系统的设计嵌入式系统采用基于开源硬件平台的Arduino板,通过连接传感器和执行器实现系统的控制。
电机驱动控制采用直流电机驱动器对电机进行控制,通过PWM控制电机的速度和方向。
直升机平衡控制使用加速度计和陀螺仪传感器,通过PID控制算法实现直升机的平衡控制。
通信模块的设计采用无线通信模块实现无人机和控制端之间的通信和数据传输,通过串口通信实现数据的传输和控制指令的接收。
实训成果最终实现了一款基于嵌入式平台的自主飞行直升机,可通过控制端实现起飞、降落、悬停、方向控制等功能。
总结本实训通过嵌入式技术的应用,实现了一款可自主飞行的无人机,提升了学生的实践能力和综合素质。
实践意义该实训旨在为学生提供硬件开发和嵌入式系统的实践经验,培养学生的团队协作和创新思维能力,同时也拓宽了学生在无人机行业的就业前景。
实训难点本次实训的难点在于综合应用多种技术,如Arduino编程、电机控制、加速度计和陀螺仪的使用、无线通信技术等,需要同学们不断探索和实践。
实践收获通过实践,同学们不仅掌握了嵌入式系统的设计和开发技术,同时还提高了解决问题的能力和创新思维,为拓展个人职业发展方向打下了坚实的基础。
结束语本次实训让我们更深入地了解了嵌入式系统和无人机的开发实践,也让我们更加热爱和追求技术发展的世界。
感谢老师们的指导和同学们的合作,相信在未来的学习和工作中,我们也能够展现出更加出色的才华和创新能力!。
应用嵌入式技术的农业无人机的设计研究
应用嵌入式技术的农业无人机的设计研究第一章引言现代农业技术的发展趋势越来越偏向于大规模化、智能化、自动化,并且朝着生产效率、品质和可持续性的方向不断发展。
目前,农业的弱点之一是作业效率和人力成本。
解决这些问题的一个可行的方案是采用农业无人机技术。
无人机可以在空中高效完成农业作业,无需人工干预,提高作业效率的同时也可以提高农作物的品质与产出.第二章嵌入式技术在农业无人机设计中的作用嵌入式技术是应用于安全性高、应用性强的实时嵌入式系统中的技术,它的作用在农业无人机中也不可忽视。
无人机作为农业生产的新型工具,除了需要传统的机械结构外,还需要更多的嵌入式技术来提升其智能化程度。
嵌入式系统可以控制无人机完成复杂的农业任务,诸如喷洒、测量、采样等。
同时,嵌入式系统还能监测气象数据,帮助农业决策者做出正确的决策。
第三章农业无人机嵌入式系统的硬件设计1. 飞控系统:飞控系统是飞机的心脏,它可以获取、处理传感器数据并控制电机旋转来完成不同的动作。
飞控系统主要包括中央处理器、传感器等组件。
2. 通讯系统:为了保证农业无人机与地面的通讯顺畅,在设计阶段需要考虑通讯系统的设计。
通讯系统包括GPRS、WiFi和蓝牙等组件。
第四章农业无人机嵌入式系统的软件设计嵌入式软件设计是农业无人机中最重要的一部分,它可以决定系统的性能以及系统对不同环境的适应性。
在软件设计中需要考虑如下关键点:1. 控制算法:根据不同的作业任务,设计不同的控制算法来提高农业无人机的效率。
2. 传感器数据处理:传感器可以采集环境数据和作业中的参数,处理这些数据可以得到更多的信息并且提高控制算法的效率。
3. 决策机制:决策机制是为机器人决策制定规则的过程,这部分设计通过判定、学习等方法实现。
第五章农业无人机嵌入式系统的应用场景农业无人机嵌入式系统在农业生产中有多种应用场景,例如:1. 无人机照片实时巡检:通过摄像头实时拍摄农田,可以帮助农民及时发现耕作上的问题和不良状态。
嵌入式开发在无人设备中的应用
嵌入式开发在无人设备中的应用1. 引言随着科技的不断进步和人工智能的快速发展,无人设备作为一种新兴的技术应运而生。
无人设备通过嵌入式开发等技术的应用,实现了自主感知、自主决策和自主执行任务的能力。
本文将探讨嵌入式开发在无人设备中的应用,介绍其在各种领域的具体应用案例,分析其优势和局限性,并展望未来的发展趋势。
2. 嵌入式开发简介嵌入式开发是一种专门针对嵌入式系统设计和开发的技术。
嵌入式系统是一种以特定功能为目标的计算机系统,通常集成在其他电子产品中,如无人机、智能家居设备等。
嵌入式开发涉及硬件设计、软件开发、系统集成等多个领域,其目的是为了实现无人设备的自主运行和智能化。
3. 无人设备中的嵌入式开发应用案例3.1 无人机无人机是嵌入式开发在无人设备中的重要应用之一。
通过嵌入式开发,无人机可以实现自主飞行、遥感影像采集、自主导航等多种功能。
以农业领域为例,无人机可以搭载各类传感器,实时监测农田的土壤湿度、作物生长情况等,并根据数据分析结果自主完成农药喷洒、灌溉等操作,提高农作物的产量和质量。
3.2 智能家居设备随着人们生活水平的提高,智能家居设备得到了越来越广泛的应用。
嵌入式开发在智能家居设备中发挥着重要作用。
例如,智能音箱可以通过嵌入式开发实现语音识别、语音交互等功能,让用户可以通过语音指令来控制家居设备的运行。
此外,智能家电的嵌入式开发应用也越来越广泛,如智能电视、智能灯具等,使得家居生活更加便捷和智能化。
3.3 自动驾驶汽车无人驾驶汽车是当前嵌入式开发的热门应用之一。
通过嵌入式开发,无人驾驶汽车可以实现自主感知、环境识别、路径规划等功能。
搭载了各种传感器和人工智能算法的无人驾驶汽车可以根据路况、交通信号等情况自主决策,并安全、高效地完成驾驶任务。
随着无人驾驶技术的不断成熟,预计在未来几年内将逐步实现商业化应用。
4. 嵌入式开发的优势和局限性4.1 优势(1)高度定制化:嵌入式开发可以根据不同的应用需求进行定制化设计,满足特定设备的功能要求。
基于ARM嵌入式系统的无人机控制技术研究
基于ARM嵌入式系统的无人机控制技术研究随着科技的快速发展,无人机的应用越来越广泛,从拍摄航拍照片到民用航空、公共安全等领域的运用,无人机的控制技术也越来越重要。
基于ARM嵌入式系统的无人机控制技术是目前国内外研究的热点之一,本文将从硬件设计、控制算法和应用场景三个方向来进行研究和探讨。
一、硬件设计ARM处理器的高性能和低功耗特性,使得其成为嵌入式系统中的首选芯片之一。
在无人机控制系统中,ARM芯片能够提供强大的处理能力和工作稳定性,满足控制器的各项要求。
同时,多传感器的使用也为无人机提供了更为精确、全面的数据支持。
1.传感器系统:无人机控制需要大量的精准数据,因此传感器系统是非常重要的一部分。
传感器系统包括:GPS、气压计、陀螺仪、加速度计等。
其中,GPS是用于定位和导航,气压计用于测量无人机高度,陀螺仪和加速度计用于测量运动状态和加速度。
传感器系统能够提供完整的环境和无人机状态数据,提高了无人机行动的稳定性和安全性。
2.通信系统:无人机在飞行过程中,需要远程控制,这就需要一个稳定可靠的通信系统。
通信系统包括数据链和遥控器。
数据链是无人机和地面控制中心之间的数据传输通路,遥控器则是用于控制无人机。
通信系统采用WiFi、蓝牙或者4G通信技术。
3.电源系统:无人机需要稳定的电源系统来保证长时间的高空飞行。
电源系统包括电池、充电器、电源管理系统等。
针对不同类型的无人机,电源系统应该有相应的设计保证。
二、控制算法无人机的飞行控制主要分为状态估计、控制器设计和飞行规划三个部分。
其中,状态估计是根据传感器数据预测无人机状态,控制器设计是根据无人机状态控制无人机运动,飞行规划则是根据任务需求规划无人机航线。
1.状态估计:状态估计主要采用卡尔曼滤波算法,对传感器数据进行数据处理和预测。
卡尔曼滤波既能够进行状态估计,也能采用误差分析算法进行逆向控制。
2.控制器设计:由于无人机飞行过程中存在风、阻力等干扰因素,因此需要控制器进行无人机运动的控制。
嵌入式系统在无人机拍摄中的应用研究
嵌入式系统在无人机拍摄中的应用研究随着科技的发展和无人机技术的不断进步,无人机的普及与应用逐渐被人们所接受和赞赏。
无人机的应用领域越来越广,兼具便携、安全、高效和多样性的特点,因此受到越来越多人的注重和重视。
而嵌入式系统在无人机拍摄中的应用研究,则是最受关注的领域之一。
一、无人机拍摄的现状及趋势随着人们生活和社会的不断进步,人们对拍摄的要求也逐渐提高。
无人机凭借其小巧、便携、灵活、安全等特点,能够拍摄到传统摄影无法触及的角度和场景,充分满足了人们对拍摄的需求。
当前,无人机拍摄主要应用于风景拍摄、摄像、航拍拍摄、地形测量等方面。
此外,无人机拍摄还应用于各类活动中,如体育比赛、婚礼、演唱会等。
由于它具有移动性、高度、角度、景深和追踪等特点,越来越多的人对无人机的应用表示出了极大的兴趣。
未来的趋势也十分明显,随着人们对摄像技术的追求不断升级,无人机拍摄市场必将越来越大。
同时,在日常生活、应急救援、安保等方面的使用也将越来越广泛。
二、嵌入式系统,也叫做嵌入式产品,是指内嵌在其他设备中的电子系统。
嵌入式系统在无人机拍摄中应用广泛,主要是为了提高无人机的性能和拍摄品质。
1.控制系统控制系统是无人机的“大脑”,影响其飞行的稳定性和精度。
传统的多旋翼控制系统是基于单片机进行控制的,需要传感器、舵机等来实现控制。
而现在,由于嵌入式技术的高度发展,无人机控制系统更多地依赖于FPGA、DSP处理器、ARM等,运行速度快、控制精度高、可靠性更好,同时FIGA、DSP在解决摄像质量问题上的优势明显,拍摄画面质量得到了进一步提高。
2.图像处理系统无人机拍摄质量的好坏很大程度上取决于图像处理系统。
嵌入式系统通过图像理论算法和数字信号处理等技术,对拍摄的视频、图片进行处理,使图像更加生动、清晰、美观。
同时,无人机上的图像处理软件也需要进行精细设计与开发,以便能够更好地支持图像处理的功能,如亮度、对比度、饱和度、白平衡、色调、锐度、动态范围等,最终呈现出更加真实的画面。
嵌入式智能系统在无人机控制中的应用研究
嵌入式智能系统在无人机控制中的应用研究无人机(Unmanned Aerial Vehicle,简称UAV)作为一种具有广泛应用前景的智能系统,近年来在各个领域中得到了广泛的应用和研究。
其中,嵌入式智能系统在无人机控制中的应用研究尤为重要。
本文将从嵌入式智能系统的概念、无人机控制需求、嵌入式智能系统在无人机控制中的具体应用等方面进行深入研究和分析。
一、嵌入式智能系统概念嵌入式智能系统是指将计算机技术与传感器技术相结合,将计算和感知功能集成到一个设备或一个网络中,并通过与环境进行交互来实现各种功能。
它具有实时性、低功耗、小体积等特点,并且可以与其他设备进行通信和协作。
二、无人机控制需求分析1. 安全性需求:由于无人机通常在复杂多变的环境中飞行,因此对于飞行安全性有着严格要求。
嵌入式智能系统可以通过传感器获取周围环境信息,实时分析并判断飞行状态,从而保证飞行安全。
2. 自主性需求:无人机需要具备自主决策和执行任务的能力。
嵌入式智能系统可以通过机器学习和人工智能算法来实现无人机的自主性,使其能够根据环境变化做出相应的决策。
3. 稳定性需求:无人机在飞行过程中需要保持稳定。
嵌入式智能系统可以通过控制算法和传感器反馈来实现对无人机的稳定控制,从而提高其飞行稳定性。
三、嵌入式智能系统在无人机控制中的应用1. 路径规划与导航:嵌入式智能系统可以通过感知环境信息、分析地图数据等方式,对无人机进行路径规划和导航。
它可以根据任务需求、环境变化等因素来选择最佳路径,并实时调整航线以避免障碍物。
2. 避障与避让:在复杂多变的环境中,避免碰撞是保证飞行安全的关键。
嵌入式智能系统可以通过传感器获取周围障碍物信息,并进行实时分析和判断,从而实现无人机的避障与避让功能。
3. 图像识别与目标跟踪:嵌入式智能系统可以通过图像识别算法对无人机获取的图像进行分析和处理,实现目标识别和跟踪。
这对于军事侦察、安防监控等领域具有重要意义。
4. 自主控制与任务执行:嵌入式智能系统可以通过机器学习算法对无人机进行训练和学习,使其具备自主决策和执行任务的能力。
嵌入式系统在无人机飞行控制中的应用研究

嵌入式系统在无人机飞行控制中的应用研究无人机技术的迅速发展和广泛应用,给许多领域带来了巨大的变革和机遇。
而无人机飞行控制系统是无人机中不可或缺的核心部分。
嵌入式系统作为无人机飞行控制中的关键技术之一,扮演着重要的角色。
本文将探讨嵌入式系统在无人机飞行控制中的应用,并着重分析其研究领域、应用案例、技术挑战以及未来发展方向。
嵌入式系统是一种特定应用专用的计算机系统,它通过嵌入在其他设备或系统中来实现其特定的功能。
在无人机飞行控制系统中,嵌入式系统充当着类似大脑的角色,负责采集、处理和传输各种传感器数据,控制飞行器的动作和操作。
它通过高性能的处理器和丰富的软件库,实时响应并控制无人机的飞行状态、导航、通信以及任务执行。
在无人机的飞行控制中,嵌入式系统扮演了重要的角色。
首先,嵌入式系统通过集成多个传感器,例如加速度计、陀螺仪、气压计等,实现了无人机对其周围环境的感知能力,从而能够进行定位、姿态控制和障碍物回避等操作。
其次,嵌入式系统具备强大的计算和处理能力,使得它能够实时处理大量的数据,并根据飞行算法来控制无人机的状态和动作。
例如,嵌入式系统可以计算飞行器与目标之间的距离和方位角,并相应调整无人机的飞行姿态和速度。
这些控制操作在极短的时间内完成,从而确保了飞行的安全性和稳定性。
此外,嵌入式系统还能够集成各种无线通信技术,使飞行器能够与地面站、其他无人机和其他设备进行高效的数据交换和通信。
通过嵌入式系统的实时数据传输和分析,地面操作员可以对无人机的飞行状态进行监控和控制,从而确保任务的顺利完成。
嵌入式系统在无人机飞行控制中的应用领域非常广泛。
首先,无人机在军事领域拥有广泛的应用。
嵌入式系统能够实现无人机的高度自主飞行,保证战场上飞行器的高灵活性和机动性。
同时,嵌入式系统还能够搭载各种类型的载荷和传感器,实现远程侦查、监视和作战行动等任务。
其次,嵌入式系统在民用领域也有重要的应用价值。
例如,无人机在农业、地质勘探、环境监测等领域的应用已经逐渐成熟。
stm32无人机方案
stm32无人机方案无人机(Unmanned Aerial Vehicle,简称UAV)作为一种高新技术产品,具有广泛的应用前景。
随着科技的不断发展,STM32单片机作为嵌入式领域的重要组成部分,逐渐应用于无人机控制系统中。
本文将介绍STM32无人机方案的基本原理、硬件设计、软件开发以及未来可能的改进方向。
一、方案原理STM32无人机方案是基于STM32单片机的嵌入式系统,通过飞行姿态传感器、飞控回路、电动调速器等模块来实现对无人机飞行状态的监测与控制。
其中,STM32单片机作为核心控制芯片,通过运算处理来实现姿态和状态的判断,并向电动调速器发送指令来调整无人机的飞行状态。
二、硬件设计1. 控制板设计STM32无人机的控制板是整个系统的关键组成部分。
它需要集成STM32单片机、传感器、通信模块等,同时还需要考虑到电源管理、封装形式等因素。
为了保证系统的性能和可靠性,我们可以选择合适的封装形式,如通过多层板设计、优化布线来提高信号传输的稳定性和可靠性。
2. 传感器选择无人机的飞行状态需要通过传感器进行实时监测。
常用的传感器包括陀螺仪、加速度计、磁力计等。
在选择传感器时,需要考虑测量范围、精度、响应速度等因素,并根据实际需求进行适当的配置。
3. 电动调速器控制电动调速器用于调整无人机的飞行状态,可以通过PWM信号来控制电机的转速。
在硬件设计中,需要考虑到电动调速器的功率输出、响应时间等特性,并合理布局电源供给以及信号传输线路。
三、软件开发1. 系统架构设计在软件开发中,需要先进行系统架构设计,明确各个模块之间的关系和功能。
可以采用任务调度的方式,将不同的模块划分为不同的任务,通过时钟中断来控制任务的执行顺序。
2. 飞行控制算法飞行控制算法是实现无人机飞行控制的核心。
常用的飞行控制算法包括PID控制算法、模糊控制算法等。
根据实际需求和系统特性,选择合适的飞行控制算法进行开发和优化。
3. 通信模块开发无人机需要与地面控制站或其他设备进行通信,在软件开发中需要设计相应的通信模块。
基于嵌入式的无人机控制系统硬件电路设计
基于嵌入式的无人机控制系统硬件电路设计在无人机飞行控制系统中,飞行控制器是其核心部件,它负责飞行控制系统信号的采集、控制律的解算、飞机的姿态和速度,以及与地面设备的通讯等工作。
随着无人机越来越广泛的应用,它所完成的任务也越来越复杂,对无人机的机动性要求也越来越高,这就要求无人机的控制核心向高集成度和小型化方向发展。
本文以586-Engine 嵌入式芯片为核心,设计了某型无人机的飞行控制器。
基于AMD Elan SC520 处理器的微控制模块,具有高可靠性、结构紧凑以及低功耗等特点,它同时具有功能强大的调试软件。
586-Engine 的主要参数指标如下:(1)CPU 为32 位AMD Elan SC520,主频为133MHz;(2)具有高性能的浮点运算单元,支持正弦、正切、对数等复杂运算,非常适合需要复杂运算的应用。
(3)配置512KB 的SRAM,512KB 的Flash,114 字节内部RAM;(4)支持15 个外部中断。
共有7 个定时器,包括一个可编程内部定时器,提供3 个16 位内部定时器和3 个16 位GP 定时器,再加上一个软件定时器。
这些定时器支持外部事件的计时和计数。
软件定时器提供微秒级的硬件时间基准。
(5)提供32 路可编程I/O,2 个UART。
共有19 路12 位A/D 输入,包括11 路ADC 串行输入和8 路并行ADC,转换频率为300kHz;6 路D/A 输出,包括2 个串行输出DAC 和4 个输出并行12 位DAC,转换频率为200kHz。
(6)工作温度为-40℃~80℃,尺寸为91.4mm&TImes;58.4mm&TImes;7.6mm。
飞行控制器硬件设计该型无人机是为海军野战部队提供通讯中继用途的中型轮式无人机,其飞行控制器是一个单独装箱的小型航空机载电子设备,由DC/DC 直流电源变。
基于嵌入式系统的无人机自主飞行技术研究
基于嵌入式系统的无人机自主飞行技术研究无人机作为一种已经广泛应用的无人系统,具有越来越广泛的应用领域。
如今,人类的空中活动不仅是乘坐商业飞机,而且还可以通过无人机进行实现。
无人机自主飞行技术是现代无人机最重要的技术之一,一直是人们关注的焦点。
本文将探讨基于嵌入式系统的无人机自主飞行技术研究。
一、什么是嵌入式系统首先,我们需要了解嵌入式系统。
简单来说,嵌入式系统就是包含有限的计算资源和专用控制的计算机系统。
它可以被嵌入到另一个设备中,实现各种功能,例如自动控制、驱动和监测等。
嵌入式系统以其高度可靠、高效和灵活的特点,适用于各种实时控制和智能系统应用。
二、基于嵌入式系统的无人机原理现代无人机采用先进的嵌入式系统来实现其自主飞行技术。
因此,了解无人机和嵌入式系统的原理对我们理解无人机自主飞行技术至关重要。
首先,无人机系统主要由无线电控制组件、飞控计算机和嵌入式系统组成。
其中,嵌入式系统是实现无人机自主飞行控制的关键组件之一。
其次,嵌入式系统采用高效的控制算法和传感器技术来实现无人机自主飞行。
嵌入式系统可通过控制算法控制传感器,将相应的数据转换为指令,负责无人机导航,控制和保持飞行方向,升降角度,制动等。
同时,通过接收来自传感器的信号,嵌入式系统可以调整无人机的运动姿态,并根据飞行环境进行调整,保证飞行质量和安全。
三、基于嵌入式系统的无人机自主飞行技术的应用现代无人机的自主飞行技术应用范围广泛。
无人机可以在军事、民事、农业和工业等领域进行广泛的应用。
以下是无人机应用范围的一些示例:国防军事:无人机用于侦察,侦察和作战任务。
嵌入式系统实现了无人机在战场上的自主飞行,精确打击和实时联网。
民事:无人机用于航拍和检查电力线路等民用领域。
嵌入式系统可以实现无人机的高质量、高效和精确地自主操作,连续监测和自主纠错。
农业:无人机可用于精准农业,监测农田、植物等农业信息。
嵌入式系统实现了无人机对地面和植物的高维度监测和多源信息捕获,以提高农业生产效率和精度。
基于嵌入式的无人机勘察系统设计
基于嵌入式的无人机勘察系统设计陆兴华【摘要】研究基于嵌入式的微小遥感无人机勘察系统,以ARM 内核的S3C2410控制芯片作为系统的微控制器,设计出该系统的总体架构方案。
该系统结合了无线网络、无线传感技术与嵌入式技术,以模块化设计实现数据采集和传输功能。
采用无线射频模块 XT09-SI负责远程控制操作,运用DM368视频协处理对高压缩率的 H.264标准的图像进行压缩编码,通过UCOSII终端操作系统显示勘察结果数据的显示。
经过多次的实验测试,该无人机勘察系统实时性好、精度高、性能稳定,能够实现对环境的空中勘察。
%Research of small uav remote sensing investigation system based on embedded technology , using ARM coreS3C2410 chip as the system microcontroller to design the overall system architecture. The system combines wireless network , wireless sensor technology and embedded technology to realize data acquisition and transmission function in modular design. The RF modules XT09-SI as responsible for remote control operation, using DM368 video co-processor for high compression rate of h. 264 standard of image compression coding, display survey results through UCOSII terminal operating system.After many times of experiment test, the uav reconnaissance system has a good real-time performance, high precision and stable performance, can be able to achieved on the environment aerial survey.【期刊名称】《电子设计工程》【年(卷),期】2015(000)024【总页数】3页(P170-172)【关键词】嵌入式;H.264;无人机;勘察【作者】陆兴华【作者单位】广东工业大学华立学院,广东增城 511325【正文语种】中文【中图分类】TN919随着遥感、通讯技术的迅速发展,微小无人机的设计逐步被深究。
无人机嵌入式神经网络图像识别系统设计研究
无人机嵌入式神经网络图像识别系统设计研究摘要:近年来,人工智能技术发展更加成熟,带动无人机设备的图像识别技术水平提升,通过无人机拍摄得到的图像数据,可以借助嵌入式的神经网络手段,在特定目标下实现准确识别。
本文主要围绕无人机的图像识别系统展开,基于嵌入式的神经网络,分析无人机图像识别数据、技术流程,探究系统具体设计方案,提升无人机图像识别的准确率,促进无人机实现智能化发展。
关键词:数据图像;识别跟踪;神经网络;硬件设计;无人机设备引言:利用无人机拍摄影像阶段中,对目标事物进行识别、追踪是系统的重点功能。
纵观传统发展中的探测识别,当识别特定目标时很多时候运用人工识别聚类的方式来完成,这种形式经常受到目标姿态等因素干扰,存在着较强的干扰性,致使后期处理结果缺乏精准性,因此应基于嵌入式神经网络展开深层研究,将其作为无人机图像识别的应用技术,从而实现准确拍摄。
1 无人机图像识别的数据和实现方法在无人机设备中,图像识别环节运用了计算机的视觉处理模式,同时运用嵌入式神经网络手段,针对无人机拍摄获得的图像数据,实现高效分析、处理。
一般情况下,得到大量图像之后,选择已经标注妥善的数据样本集,进一步执行训练过程,在数据集中,图像数据类型较多,比如建筑物、场景、人物等。
针对这些数据集,为了达到准确效果,提升鲁棒性,需要借助嵌入式神经网络,辅助多种算法,高效提取特征元素,展开数据的预处理[1]。
利用神经网络模型,能够实现数据集的训练过程,不仅能实现准确定位,还能得到类别划分清晰的图像识别模型。
与此同时,无人机的图像识别功能实现中,还可以应用深度学习算法,凭借多个结构发挥作用,比如,卷积神经网络引入系统中时,比较适合对二维形式的数据图像进行处理,通过卷积核,准确提取特征,从而进行卷积计算,针对图像对象进一步执行识别、分类处理。
对于嵌入式神经网络,其涉及量化训练,通过拉低宽的数据形式,为神经网络表达激活值、权重,这样能够减少神经网络的实际运算量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无人机嵌入式系统设计
—嵌入式系统原理与设计报告
班级:
姓名:
学号:
一、无人机功能需求分析
1)无人机是一种由动力驱动、机上无人驾驶、可重复使用的航空器的简称,可以简单地分为军用和民用两大类,在这两个领域可以说非常火热。
2)在军事领域,无人机的最大优势体现在能够)执行3D 任务(即,Dull(枯燥乏味)、Dirty(恶劣环境)、Dangerous(危险)),这些任务可以细分为空中侦察、目标搜索及定位、炮兵校射、激光照射、战场观察和毁伤评估、通讯中继、大范围搜救、电子战、对地攻击、导弹拦截、战场物资补给及运送、空中格斗等。
3)在民用领域,无人机价格相对低廉,应用领域包括航拍、植保、地质勘探、高压输电线路巡检、油气管路巡查、高速公路事故管理、森林防火巡查、污染环境勘察、反恐维稳、公安执法、应急救援与救护、抢险救灾、海岸线巡查等。
二、无人机组成原理
无人机可主要有固定翼无人机、无人直升机和多旋翼无人机三大平台,其它小种类无人机平台还包括伞翼无人机、扑翼无人机和无人飞船,这里主要分析下微小型四旋翼无人机。
1)由于微型无人机飞行姿态多变,为了增大无人直升机的带载能力,该无人机采用了四旋翼的机械结构,通过机载导航系统控制使其各旋翼之间协调运动,实现四旋翼无人机的飞行姿态自动调整,可按要求完成垂直起落控制、空中悬停控制、偏航控制、滚转控制、俯仰控制等多种动作及任务。
四旋翼无人机在各种结构特征参数确定的情况下,通过改变旋翼转速来改变拉力。
四旋翼飞行器结构简图及受力分析
2)四翼无人机系统需要微型螺旋仪、加速速传感器、大气压传感器、电机转子转速测量单元和GPS接收单元。
机载控制部分主要由控制系统核心模块、惯性测量单元模块IMU(Inertial Measurement Unit)、压力传感器模块、无线部分(无线控制信号接收模块、无线数据传输模块、全球定位系统模块、无线视频传输模块)、电机控制部分(电机驱动控制模块、电机转子转速测量模块)以及红外距离传感器模块等组成。
三、无人机嵌入式计算机系统总体方案
飞控系统由飞控计算机及其外围传感电路、执行机构组成,因此飞控计算机的主要功能包括:提供稳定的电源供电系统、对各类模拟信号进行采样预处理、处理各种开关量以控制相应外围设备、进行控制律计算以控制和稳定无人机、操纵发动机的工作状态以决定飞行模态、实现飞行航路的预设置等。
系统总体设计框图
四、无人机嵌入式计算机系统硬件方案设计
系统采用Atmel公司的工业级ARM9处理芯片AT91RM9200为核心,工作频率可高达200 MIPS,其外围电源电路、复位电路、晶振电路保证系统正常工作,外扩32 MB 的SDRAM作为内存,32 MB的闪存用作程序和数据存储空间,A/D电路完成对模拟信号的采样,D/A电路完成对数字量的转换,8路串口通信电路工作方式在RS232、RS422、RS485之间可设置,32路离散I/0口可设置输入输出,另外留有调试用的DBUG口。
4.1 核心控制电路
核心控制电路确保ARM最小系统板及与各外扩功能芯片正常运行。
设计最小系统板(核心板)的关键是AT91RM9200与SDRAM、闪存芯片的接口。
实验表明,核心板运行稳定可靠,满足计算处理数据时的速度和精度要求。
ATOIRM9200的存储器扩展原理
4.2 A/D采样电路
A/D采样电路用来对各种模拟信号进行采样预处理,由AD7490提供16路分辨率为12位的A/D通道。
AT9lRM9200通过SPI口与AD7490进行通信,AT91RM9200向AD7490写入控制字,使其按设定的要求工作,通过Dout引脚将A/D采样结果传送到ARM的CPU。
为了确保采样精度,AD7490需外加2.5 V参考电压y枷。
根据设计要求,A/D采样电路的输入信号电平范围为一10 V~+10 V,而AD7490允许的输入信号电平范嗣为0 V~V。
f|N或0V~2y加一,因此需要在输入信号与AD7490的输入引脚之间增加调理电路。
A/D转换电路原理图
4.3 D/A转换电路
D/A转换电路用来处理各种开关量,由AD5668提供8路分辨率为16位的D/A 通道。
AT91RM9200通过SPI口与AD5668进行通信,AD5668的时钟频率可达50 MHz。
D/A转换电路原理图
4.4 UART串口通信
根据设计指标,系统共需要8路串口通信,AT91RM9200自带4路串口通信,由STl6C654对4路外扩串口通信进行控制。
串口通信电路工作方式在RS232、RS422、RS484之间可设置。
通信速率和中断号由系统软件设置。
扩串口通信电路原理图
4.5 DBUG串行调试口
由ADM3202实现DBUG串行调试口电路的控制。
系统经由DBUG串行调试口下载程序,进行启动和调试。
五、无人机嵌入式计算机系统软件方案设计
本无人机系统能以自动/手动两种方式通过数字信号、继电器和舵机完成对任务的控制。
任务控制包括电子设备电源控制、接收串行数字信号设备、接收高低电平信号设备、微型无制导火箭电子点火控制、目标识别、开伞、定点空投等任务,并可根据任务的实际需要设计各种独立的任务控制模块。
本系统采用数字信号及继电器控制任务的执行,在自动控制时由导航控制系统在到达任务点时发出所需信号或由开关继电器进行控制;在手动控制时由自动/手动控制切换单片机检测遥控接收机任务通道的波形,根据地面指令发出所需信号或由开关继电器进行控制。
数据量大、功能多、实时性高是自主飞行控制系统的主要特点。
控制系统除在电路设计中采取了相关措施之外,根据任务要求,软件设计中还采用了定时监控技术和容错技术检测系统运行状态,并采用了余度技术和自恢复技术保证在软件意外故障情况下重新恢复空中机器人故障前的运行状态。
飞控软件系统主模块流程如图所示,主要完成RAM,D/A,串口,I/O和单片机外围接口的初始化;A/D测试与采集;状态信息、通信控制;航向实时计算;导航数据实时处理;参数设置;紧急情况处理以及任务执行等功能。
飞控软件系统主模块
六、实验室调试及测试方案
嵌入式项目的调试一般基于硬件和软件两个方面,一般先从硬件开始。
基于硬件方面,在实验室里,我们可以借助万用表,检测硬件电路工作时某个节点处电压是否属于正常值范围;利用示波器查看系统与外部世界的交互过程,监视目标内部电路上的信号,查看总线上的时序关系等。
基于软件方面,常用工具有在线仿真器,片上调试器,ROM监视器,JTAG等。
在线仿真器允许用户查看处理器内部数据或代码并控制CPU运行;用片上调试器占用几根专用的CPU引脚,通过片上调试逻辑实现运行控制,可以对目标机CPU进行设置断点、单步执行以及资源读写等绝大多数基本调试活动;用ROM监视器(驻留ROM的小程序),辅助测试与调试嵌入式程序,具有简单是软件断点功能,包括在程序中设置断点并运行用户程序直到断点处,也能单步运行应用程序。
利用这些硬件和软件方面的工具对无人机项目惊醒全方面的测试和调试,找出项目中的错误、漏洞和不足之处,解决并且完善。
七、完成嵌入式系统设计报告后的感受
总体来说,这次系统设计难度对我而言是非常大的,尽管这学期学了嵌入式系统原理与设计这门课,而且上学期也修了微机原理(MIPS为基础)和实验课程,对计算机组成和嵌入式有了足够的了解,但是突然接受老师的任务去设计一个无人机的嵌入式系统,整个人还是有点懵,初步涉入还是感觉到所学内容的匮乏,不足以完成任务。
于是只能去网上搜索相关资料来看。
查看了一些博客,对目前无人机的形势,无人机嵌入式系统的研究学到了很多,却是越发感觉到项目的困难。
后来上万方数据,找了几篇期刊来学习,总算有了点眉目,但是还是无法下手,最后定下心来只攻读一篇,总算知道了如何实现,于是,借助自己对那些期刊的理解,加上平时课上所学,进行设计。
最后设计完成时,感觉这次任务收获还是蛮大的,对具体的嵌入式项目有了自己的理解和体会,对以后接手自己的嵌入式项目帮助非常大,感谢老师能给我这次机会。