M310控制棒驱动机构课件F2012年10月 [兼容模式]
T-VERTER S310系列驱动器 说明书

3.3.3 外围设备应用及注意事项: 电源: 请注意电压等级是否正确,以免损坏变频器。 交流电源与变频器之间必须安装无熔丝断路器。 无熔丝断路器: 请使用与变频器额定电压、电流等级相符的无熔丝断路 器做变频器供电电源的通/断控制,并做为变频器的保护 装置使用。 无熔线断路器请不要做为变频器的运转/停止切换功能 使用。 漏电断路器: 如若加装漏电断路器作漏电故障保护时,请选用感度电 流 200mA 以上,动作时间为 0.1 秒以上的器具,以防高 频误动作。 电磁接触器: 一般使用时可不加电磁接触器,但变频器做外部控制、 用到停电后自动再启动等功能、或使用制动单元时,须 加装一次侧电磁接触器。 电磁接触器请不要做为变频器运转/停止切换功能使用。 功率改善交流电抗器: 220V 15KW 以下的变频器, 其供电电源为(600KVA 以上) 的大容量电源时或为改善电源的功率可外加交流电抗 器。 输入侧噪声滤波器: 变频器外围有电感性负载时,请务必加装使用。 变频器: 输入电源端子 L1、L2 无相序之分,可任意换相连接。 输出端子 U、V、W,接至电机的 U、V、W 端子,如果 送指令给变频器执行正转,但电机为反转状态,只要将 U、V、W 端子中任意两相对调即可。 输出端子 U、V、W,请勿接交流电源以免变频器损坏。 接地端子请正确接地(220V 级:接地阻抗<100Ω)
注意
请勿对变频器内部的零组件进行耐压测试,这些半导体零件易受高电压损毁; 绝不可将变频器输出端子 U、V、W 连接至交流电源; 变频器主电路板 CMOS 集成电路易受静电影响及破坏,请勿触摸主电路板。
0.2 产品检查
每台台安变频器在出厂前均做过功能测试,客户拿到变频器拆封后,请执行下列检查 步骤。 变频器的机种型号是否符合您所订购的型号。 变频器是否因运送不慎造成损伤,若有损坏请勿接入电源。 当您发现有上述问题时请立即通知台安科技各区技术人员。
北京落木源 IGBT驱动器产品手册TX-DE300M2说明书

二单元大功率IGBT驱动板TX-DE300M2 产品手册目录一、概述 (3)二、结构框图 (3)三、电气参数 (3)3.1 极限参数 (3)3.2 驱动特性 (4)3.3 工作条件 (4)3.4 短路保护特性 (4)3.5 对输入电源的要求 (5)四、波形图 (5)4.1 正常驱动波形图 (5)4.2 保护波形图 (5)4.3 说明 (5)五、尺寸结构 (6)5.1 外形尺寸和元器件位置示意图 (6)5.2 输入输出接口 (6)5.2.1 输入插座Jps引脚说明 (6)5.2.2 输出插座Joa和Job引脚说明 (6)六、应用电路说明 (6)6.1 电源输入端Vdc的连接 (6)6.2 驱动器低压侧的设置和连接说明 (6)6.2.1 工作模式输入信号Mode (6)6.2.2 死区和窄脉冲抑制示意图以及死区时间调整 (7)6.2.3 PWM输入信号INA和INB (7)6.2.4 故障输出信号Fault/ (7)6.2.5 复位信号Reset (7)6.2.6 自动复位功能 (7)6.3 驱动器高压侧输出的连接 (7)6.3.1 驱动功率的计算 (7)6.3.1 与IGBT的连接 (7)6.3.2 栅极电阻 (8)6.4 软关断保护参数设置 (8)6.4.1 过流保护阈值Vref (8)6.4.2 软关断 (8)6.5 欠压保护 (8)七、相关产品信息 (8)7.1 TX-2DE300M17/33 (8)八、常见问题 (8)九、其它说明 (8)TX-DE300M2一、概述∙2DE300M17(33)加装外部元器件后的即插即用驱动板,扩展了输入信号的电压范围∙ 二单元隔离驱动板,DE300M2/17、DE300M2/33分别可驱动电压≤1700V 、3300V 的全系列IGBT∙ 自带隔离的DC/DC 电源,使用方便,用户只需提供一个15V 电源 ∙ 半桥或独立2种工作模式 ∙ 输入信号兼容2.7-18V ∙ 驱动输出电流30A∙ 变压器调制模式传递PWM 信号,工作占空比0-100% ∙ 短脉冲抑制功能 ∙ 短路软关断保护∙绝缘电压,4.5KV /DE300M2/17,7KV /DE300M2/33二、结构框图三、电气参数四、波形图4.1 正常驱动波形图 4.2 保护波形图4.3 说明正常工作时,输入的很窄的正负脉冲均被抑制,提高抗干扰性。
控制棒驱动机构17页PPT

控制棒驱动机构
16、自己选择的路、跪着也要把它走 完。 17、一般情况下)不想三年以后的事, 只想现 在的事 。现在 有成就 ,以后 才能更 辉煌。
18、敢于向黑暗宣战的人,心里必须 充满光 明。 19、学习的关键--重复。
20、懦弱的人只会裹足不前,莽撞才能 所向披 靡。
6、最大的骄傲于最大的自卑都表示心灵的最软弱无力。——斯宾诺莎 7、自知之明是最难得的知识。——西班牙 8、勇气通往天堂,怯懦通往地狱。——塞内加 9、有时候读书是一种巧妙地避开思考的方法。——赫尔普斯 10、阅读一切好书如同和过去最杰出的人谈话。——笛卡儿
Thank you
AB中型控制系统产品介绍PPT教案

DLR链路发生故障时,网络拓扑 变化
Beacon
Active Ring Supervisor
Beacon
我断线啦
我断线啦
Ring Node 1
Ring Node 2
Ring Node 3
Ring Node 4
• 当有故障发生时,Beacon数据包不能在Supervisor的两端收到;
• 当故障发生以后,supervisor 拆除原来的断点,当前的网络结构为线型拓 扑
元器件级控制平台
Price
集成架构平台
3
3
新型CMX5370系列控制器独特之
支持无电池运行模式
控制器扫描时间 提高2-3倍
处
L1, L2和L3 “M”类型控制器 均集成运动控制功能 (CIP Motion / CIP Synch)
程序和数据存储 采用SD Flash卡
• 性能显著提高 • 集成运动控制能力 • 增强紧凑型一体化控制器竞争力 • 新增特性 • 为业务增长带来更多机会¥¥¥
8 个 1734 I/O 模块
• 远程:4 个或 8 个远程设备 (EIP)
型号:(6 个目录)
L30ER、L33ER(以太网)
L30ERM(以太网 + 4 轴 CIP 运动控制)
L33ERM(以太网 + 8 轴 CIP 运动控制)
L36ERM(以太网 + 16 轴 CIP 运动控制)
存储器: 1MB、2MB、3MB
Up to 2 Axis
OEM过程应用- Mixing, Filtration, Blending, Baking, Drying, Compression
Extrusion, Coating, Clinical Washer
华明有载开关机构SHM-III说明书1001
附图 4 HMK8 与 ET-SZ6 连接示意图
9
附图 5 HMK8 接线原理图
1-N
10
附图 6 ET-SZ6 接线原理图
SHM-III
智能型电动操作机构使用说明书
HM 0.460.1362
11
上海华明电力设备制造有限公司
地址:上海市同普路 977 号 邮编:200333 电话:(86)21-52708966(转各科室) 传真:(86)21-52703385 网址: 电子邮箱:public@
如需详细资料,请致电本公司索取 2010.1 印刷
1100 2.8
66
2
4 结构介绍
SHM-III
智能型电动操作机构使用说明书
HM 0.460.1362
SHM-III 型电动机构遵循标准化设计原则,采用模块式、计算机程序编码器取代了原来的机械 式带触点的电器元件。由于使用电气信号的通断,不需要用触点及机械控制来实现,真正实现了机 电分离。 4.1 机箱外部结构 机箱由箱体和箱盖两部分组成,均由耐腐蚀的铝合金低压浇铸成型。外表面均涂防护漆,整个 箱体与箱盖之间都是全密封的,防护等级 IP66。
6 安装
6.1 将电动机构安装在变压器箱体上 6.1.1 电动机构是借助四个螺栓安装在变压器箱体上,安装电动机构的支架必须平整,否则电 动机构将产生扭曲变形,甚至影响使用。注意,电动机构要垂直安装,输出轴与伞齿轮 的轴在一条垂直线上。如果变压器产生非常严重的机械震动,建议使用减震装置。 6.1.2 正确联接控制器与电动机构本体,请用户不要自行改变电缆线的长度或非专业人员自行 焊接电缆头,否则可能会影响电动机构正常工作。
6.2 驱动轴齿轮盒的安装 垂直连接方钢管如超过 2m,应加装中间支撑件并在订货时提出。
数控技术及应用清华版6数控机床的电气驱动ppt课件
(2)除了加工螺纹,进给速度不需要精确控制。
与主轴驱动动力源相比,进给驱动动力源的功率要小 得多,一般1kW就足够了。此外,进给运动的速度比 切削运动慢得多,一般工进是5~200mm/min,快进 是5m/min。
4
6.1.3 辅助运动驱动动力源
通常使用交流感应电动机作为辅助运 动驱动动力源,这些辅助运动包括冷 却泵、除屑、驱动液压马达等,在这 些应用场合,只需要进行开/关控制。
15
6.3.2 直流伺服电动机的特点与工作原理
1. 直流PWM调速的基本原理
利用大功率晶体管(简称GTR)作为斩波
器,其电源为直流固定电压,开关频率 也为常值,根据控制信号的大小来改变 每一周期内“接通”和“断开”的时间 长短,即改变“接通”脉宽,使直流电 动机电枢上电压的“占空比”改变,从 而改变其平均电压,完成电动机的转速 控制,这就是直流PWM调速的基本原理。
数控技术及应用清华版6数控机床的电气驱动ppt课件
6.1.2 进给驱动动力源
在普通机床中,通常由主轴带动齿轮链驱动进给运动。 在数控加工中,由于需要使工件或刀具按一定的进给 速度移动精确的距离,所以进给运动就不能由主轴带 动齿轮链驱动了。刀具或工件的运动有两种独立的要 求: (1)在切削加工时,刀具或工件的实际位置总是要尽可能接
与反应式步进电动机相比,混合式步进电动机的转矩体积
比大,而且混合式步进电动机的步距角容易做得比较小, 因此在工作空间受到限制、同时又需要小步距角和大转矩 的应用场合,常常选用混合式步进电动机。
此外,混合式步进电动机在绕组未通电时,转子永久磁钢
能产生自动定位转矩,虽然这一转矩比绕组通电时产生的 转矩小得多,但它能使断电时转子保持在原来的位置,这 是一种非常有用的特性。对于反应式步进电动机而言,由 于其转子上没有永久磁钢,所以转子的机械惯量比混合式 步进电动机转子惯量低,可以更快地加、减速。
PLC基础及应用第3版教学课件ppt作者廖常初FX基础第7、8章

3.平均值滤波 平均值滤波用于滤除窄脉冲干扰信号,可以设置滤波的采样周期数。取平均 值会降低PLC对外部输入信号的响应速度。 4.模拟量输入模块输出数据的读出 FX2N-4AD模拟量输入模块的缓冲存储器的功能如下: BFM #0中的4位十六进制数用来设置通道1~通道4的量程,最低位对应于通 道1。0~2对应的量程分别为–10V~+10V、4~20mA和–20~+20mA,为3时关 闭通道。 BFM #1~4分别是通道1~4求平均值时的采样周期数(1~4096)。 BFM #5~8分别是通道1~4的转换数据的平均值。 BFM #9~12分别是通道1~4的转换数据的当前值。 BFM #15为0时为正常速度转换,为1时为高速转换。 BFM #29 为错误状态信息。 在下例中,通道1和通道2被设置为–10V~+10V的电压输入,通道3、4被禁 止。模拟量输入模块安装在紧靠基本单元的地方,其模块编号为0号。平均值 滤波的周期数为4,数据寄存器D0和D1用来存放通道1和通道2的数字量输出的 平均值。
(7-1)
误差信号ev(t) = sv(t) – pv(t),mv(t)是PID控制器的输出信号,Kp是比例增益, TI和TD分别是积分时间和微分时间。式7-1中右边的前3项分别是它的比例部 分、积分部分和微分部分。它们分别与误差ev(t)、误差的积分和误差的一阶 导数成正比。可以选用P、PD或PI控制器。
7.1.3 模拟量输入模块的应用
1.模拟量输入模块的接线 FX2N-4AD模块有4个通道,最大 分 辨 率 为 12 位 , 可 选 量 程 –10 ~ +10V 、 4 ~ 20mA 和 –20 ~ 20mA , 转 换 后 的 数 字 量 分 别 为 –2000 ~ 2000、0~1000和–1000~1000。 DC 24V电源接在模块的“24+” 和“24–”端。 直流信号接在“V+”和“VI–” 端 , 电 流 输 入 时 将 V+ 和 I+ 端 短 接。
山洋驱动器说明
维护8.1故障检修(有报警时)-----------------------------------------8-2 8.2故障检修(无报警时)-----------------------------------------8-21 8.3用旋转开关进行速度环比例增益切换----------------------8-238.3.1概述------------------------------------------------------8-238.3.2设置过程------------------------------------------------8-23 8.4维护----------------------------------------------------------------8-24 8.5零部件检修-------------------------------------------------------8-258.1故障检修在以下的内容中, 将着力于解释每一个故障和报警的可能原因、检查方法以及检修措施。
为了避免事故发生, 在一个报警或者故障发生时, 一定要确保故障被去除并且确保系统安全后才可以重新操作。
在没有确保伺服驱动器、电机、机械装置和四周环境安全的情况下就去展开故障原因的调查是非常危险的。
详细了解故障发生时的情况将有助于缩小故障的可能范围、缩短故障检修过程。
在重现已确认的故障时务必确保这样做是安全的,并且要高度注意重现故障时的运行环境。
在更换伺服驱动器和伺服电机时,要确保没有其他的外部引起故障的因素以防止双重损坏。
在按照该手册推荐的方法进行故障检修以后若故障仍然存在,请咨询您的Sanyo Denki的经销商当报警状态显示为“8”、“F”或者“P”时,报警不能够复位。
在这种情况下应该先纠正该故障然后才能打开控制电源。
当一个报警出现时, 安放在伺服驱动器前面板上的七段LED状态显示屏就会开始闪烁, 并且报警从CN1输出。
数控铣床面板培训课件6823

程序按键
坐标位置按键
系统参 数按键
报警信 息按键
翻页按键
光标上下左 右移动按键
MDI键盘
图形按键
换档按键 取消按键
参数输入按键 删除按键 插入按键 替换按键 帮助按键 复位按键
数控铣床面板操作
数控铣床面板操作
数控铣床面板操作
数控铣床实习教学
三 数控铣床程序代码
1 数控铣床坐标系
数控铣床实习教学
数控铣床实习教学
Z轴设定器(光电式)
Z轴设定器(指针式)
数控铣床实习教学
对刀步骤
⑴.X、Y坐标值的测量 ①MDI模式(手动数据输入),输入
M3 S500;(执行后找正器旋转) ②手动模式下,按"POS"功能键切换到 机床坐标显示状态 ③找X坐标(见图一) ④找Y坐标(见图二)
数控铣床实习教学
数控铣床实习教学
G03 X-9 Y14 R9;
G01 X-9 Y9;
X-14 Y9;
G03 X-14 Y-9 R9;
G01 X-9 Y-9;
X-9 Y-14;
数控铣床实习教学
5 安装工件及刀具
安装工件注意事项:
①工件要放在钳口的中 间部分 ②工件被加工部分一定 要高出钳口,避免刀具 与钳口发生干涉。
装刀注意事项:
X0 Y-45; X-39 Y-22.5; X-39 Y22.5; X-39 Y0; G40 X-45 Y0; G00 Z10; X0 Y0; G01 Z-5; G41 X9 Y0 D03; Y14;
G03 X9 Y-14 R9; G01 Y-9; X14; G03 X14 Y9 R9; G01 X0 Y9; G40 X0 Y0; G00 Z100; X0 Y0 M05; M30;
秦山310MWe和方家山M310棒控控制对比

秦山310MWe和方家山M310棒控控制对比摘要:棒控系统是核电厂最重要的控制系统之一,且与反应堆安全息息相关。
本文就秦山310MWe和方家山M310的棒控系统在控制及联锁方面进行对比,有利于进一步理解其异同。
关键词:控制棒;功调;迭步;联锁;INTERLOCK1.简要介绍秦山310MWe与方家山控制棒1.1 秦山310MWe控制棒控制系统的目的是通过调节堆芯的反应性来保持反应堆冷却剂系统内的平均温度,该系统用于补偿快速的反应性变化。
控制棒分为两类:停堆棒和调节棒。
停堆棒有A1,A2两组棒。
在发生事故保护停堆时,停堆棒将大的负反应性引入堆内。
调节棒有T1、T2、T3、T4四组,它们是调节堆芯内反应性用的棒,而且只有这种棒可以在自动控制下操作。
1.2 方家山由棒控棒位系统(RGL)用于提升、插入和保持控制棒束,并监视每一束控制棒的位置。
棒数组合成2种类型的棒组:●停堆棒组:SA、SB、SC、SD组;●控制棒组:N2、N1、G2、G1和R组;2.秦山310MWe功调与方家山R棒自动运行对比2.1 秦山310MWe功调反应堆功率调节系统仅对T4组进行自动控制。
在正常工况运行时,A1、A2、T1、T2、T3各组棒都提到堆顶,而T4棒处于调节带之内。
2.1.1温度失配通道从汽轮机第一级冲动室测到的压力信号,(P11或P12),经函数定值单元变换为参考平均温度Tao,整个温度失配通道传递函数为:△Ta(s)=Tam’(s)-Tao’(s)=-2.1.2功率失配通道该通道在负荷变化引起平均温度Tavg变化以前就动作,并在平均温度Tavg变化以前就使棒开始向适当方向运动。
其传递函数为:△NT(S)=K1·K2 [PN(S)-P1(S)]2.1.3棒速程序通道输入值可表示为:TE(S)=+K1·K2 (PN-P1)2.2 方家山R棒(自动)R棒分2个子组:R1和R2,分别有4束。
2.2.1温度失配通道平均温度整定值Tref由汽机负荷和最终功率整定值的大值取得P2作为输入,整个温度失配通道传递函数为:图63.秦山310MWe T棒与方家山功率棒对比3.1 秦山310MWe T棒秦山310MWe的调节棒包括T1、T2、T3、T4,在反应堆运行时可以插入或抽出,用以补偿各种反应性的变化,并可以提供停堆能力以实现事故保护停堆(紧急停堆)。
核反应堆控制棒驱动机构放气阀咬死螺母处理工具
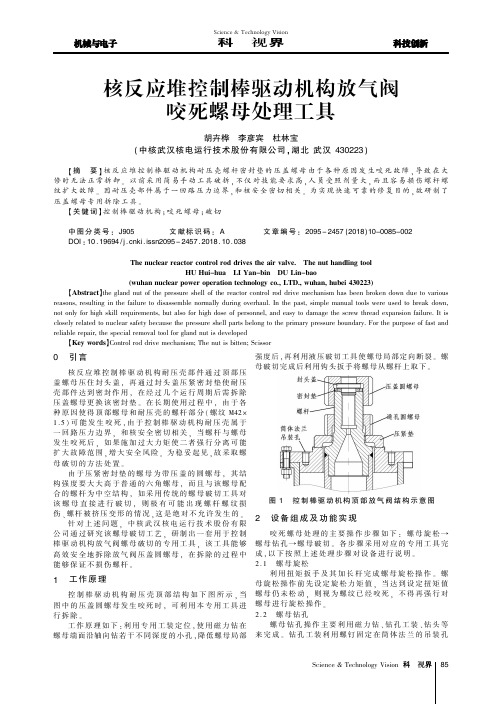
图1控制棒驱动机构顶部放气阀结构示意设备组成及功能实现咬死螺母处理的主要操作步骤如下:螺母钻孔→螺母破切。
各步骤采用对应的专用下按照上述处理步骤对设备进行说明。
螺母旋松利用扭矩扳手及其加长杆完成螺母旋松操三个小孔,钻孔位置如下图所示。
图2螺母钻孔示意图母破切螺母钻孔后局部强度降低,即可实施螺母破切操作母破切主要利用定制的液压螺母破切工具及其辅件完成母破切器套入咬死螺母,破切器刀头钻孔外缘,通过液压泵给破切器逐步,。
图3螺母破切前后对比压力计算力分析破切时的断裂截面在钻孔一侧,如下算,取下图方框中的截面进行受力截面的尺寸见下图左侧。
图4螺母破切截面示意图破切时,破切器油缸给破切刀头施加的力沿螺母径向(见下图),该力沿垂直于破切刀头侧面的分力用1表示,破切刀头角度用β表示。
螺母破切的条件为:作用在断裂截面上的应力≥螺母材料的抗拉强度。
即:σ≥σb…………………………(4-1) 2)破切截面应力计算查阅材料手册,螺母材料1Cr13的抗拉强度为σ540MPa。
=F×sin(β/2)…………………………(4-3)图5螺母破切时受力分析–断裂截面的所受的拉力;–螺母破切器轴向力,F=P×π时破切器油缸的压力,d为油缸器油缸直径为:d=80mm;–破切刀头角度,本次采用的°;数代入式(4-3)得:F1=F×sin(β/2)×sin(β/2)=P×3.14×402×sin(50°/2)=2123.力计算入式(4-2)得:σ=F1/S=(P。
式(4-1),σ=22.6×P≥540MPa86Science&Technology Vision 科技视界。
控制棒PPT
• 停堆棒组提供了额外的负反应性来建立足 够的停堆裕量。停堆裕量是指热停堆工况 下、RCCA落棒动作、假设反应性价值最大 的一束控制棒卡在全部抽出位置、氙毒和 硼浓度都没有变化时堆芯的次临界度。由 于吸收体的燃耗造成的控制棒价值损失是 可忽视的。
• 3.3.4 主要设备描述
1 控制棒驱动机构的结构 (1)承压壳体 承压壳体由销爪外壳和棒行程罩两部分构成(如 图),通过螺纹密封焊相连,以便于销爪组件的 检修。棒行程罩的上封头是一个坚固的、一体化 部件,通过与一体化顶盖相连来提供地震支撑。 销爪外壳是承压壳体的下部构件,内部安装销爪 组件。销爪外壳与CRDM接管在生产厂家内通过 双金属焊相连接;而接管通过冷缩配合和局部透 焊与压力容器上封头相连接。棒行程外壳是 CRDM压力外壳上部构件,能够在提升控制棒时 给驱动杆提供移动空间。
3非安全相关的纵深防御功能 无
4 与执照许可相关的其他功能 无
3.3.2 设计基准
1 安全相关设计基准 • CRDM的壳体提供了一个高度一体化的压 力边界,用以包容一回路冷却剂以及溶于 冷却剂或出现在压力容器上封头内部的燃 料裂变产物,承压壳体属于一回路冷却剂 压力边界的一部分。 • CRDM的设计使其在反应堆冷却剂的压力 和温度以及预期的安全壳内部环境之下运 行仍然能够维持自身的功能和结构的完整 性。
• 控制棒安装于控制棒束组件(RCCA)和灰棒 控制组件(GRCA)下面。RCCA由24根吸 收体棒组成,顶部端塞固定到一个公共连 接件(星型架)上,用来控制相对较快的 反应性变化和轴向功率分布。同样的, GRCA由24根顶部端塞固定到星型架上的 细棒组成,用于负荷跟踪。这些控制组件 提供了一种机械补偿(MSHIM)策略,能减 少反应堆冷却剂系统的调硼操作。控制棒 束组件和灰棒束组件由堆内导向机构支撑。 RCCA和 GRCA的末端与燃料组件的导向 管相接触。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
M310控制棒驱动机构介绍刘少华二○一七年八月三十日第五章每节课请准时出席,课程中途离场,举手示意;请将手机及其他通讯设备设置为振动或关闭;主动参与各项讨论及活动,完成教员布置的课堂任务;敞开心胸,吸收来自同事及教员的经验、见解和意见;愿意说出自己的想法和意见,乐于与他人分享;愿意倾听别人发表的内容;将所学转化运用于工作之中。
欢迎各位前来参加本次培训,为了使培训能够达到预期目标,我们将遵守下列约定,为学习共尽一份心力:课堂公约培训是员工最大的目录学习目的控制棒驱动机构基本工作原理控制棒驱动机构功能与基本参数控制棒驱动机构主要结构与功能与控制棒驱动机构运动相关主要部件四五三二一一、学习目的一般人员了解控制棒驱动机构基本功能、结构、基本工作原理、事故情况下落棒原理技术人员基本掌握控制棒驱动机构的基本功能、结构、工作原理。
了解电流时序图、落棒曲线图。
二、控制棒驱动机构功能与基本参数见图,按照控制和保护指令带动控制棒组件在堆芯内上下运动,进行反应堆启动、调节功率、保持功率、正常停堆;事故工况下,断电释放控制棒组件,使其在重力情况下迅速插入堆芯,实现事故停堆等功能。
二、控制棒驱动机构功能与基本参数设备分级:控制棒驱动机构是核电站长周期关键设备之一,2011年前国内只有上海一机床能够制造,按照目前产能和技术从签订合同起大约需要36~42个月完成制造。
质量保证分级:QA1(主要部件)抗震等级:Ⅱ级(耐压壳)安全等级:Ⅰ级(耐压壳)二、控制棒驱动机构功能与基本参数安装位置安装在反应堆压力容器顶盖上部,见图。
从图中可以看出它的耐压壳是反应堆冷却剂系统压力边界的组成部分。
二、控制棒驱动机构功能与基本参数主要技术参数详见M310机组ML-A型CRDM主要技术参数表。
表1 M310机组ML-A型CRDM主要技术参数表名称参数单位备注WWER-1000一期备注工作压力15.5MPa绝对压力15.7设计压力17.23MPa绝对压力17.65试验压力25.8MPa工作温度293℃300设计温度343℃350行程3618mm全行程3500工作行程步距15.875mm20步速72步/min二、控制棒驱动机构功能与基本参数表1续M310机组ML-A型CRDM主要技术参数表名称参数单位备注WWER-1000一期备注额定步数225步总步数228步事故落棒≤3.2S全行程≤4缓冲段落棒≤2.1S机电延迟≤0.15S二、控制棒驱动机构功能与基本参数表1续M310机组ML-A型CRDM主要技术参数表名称参数单位备注WWER-1000一期备注电磁线圈电源260V独立发电机380/220厂用电电磁提升力≥1602N电磁线圈绝缘500MΩ500V50对壳体棒位误差8步1棒位线圈绝缘100MΩ500V设计寿命280万步钩爪组件30年总长11286.15mm数量61套/堆首次57套121首次85套安装方式61Ω焊接专用焊机法兰螺栓连接三、控制棒驱动机构主要结构与功能结构:控制棒驱动机构属于机电仪一体化设备,它由耐压壳、电磁线圈组件、钩爪组件、驱动杆组件、棒位探测器及隔热套组件等部件组成,是一种竖直方向运动并带有位置测量的电磁提升机构,如图所示。
三、控制棒驱动机构主要结构与功能1、钩爪组件功能:钩爪组件包括在提升、插入和保持操作时与驱动杆齿槽啮合,支承驱动杆,带动驱动杆上下运动或保持原位。
位置:钩爪组件都安装在耐压壳内,如图。
它由下列零部件组成:保持钩爪和它的驱动件:磁极、衔铁、销轴、连杆等;传递钩爪和它的驱动件:磁极、衔铁、销轴、连杆等;两组钩爪与驱动杆上的环形槽啮合,移动钩爪依靠提升磁极的作用,以15.875mm的步长上、下运动,从而带动控制棒组件以步进方式上升或下降。
1、钩爪组件三、控制棒驱动机构主要结构与功能功能:驱动杆的主要作用是通过可拆接头与控制棒组件连接,实现同步运动,与控制棒组件拆卸时可以方便脱开。
位置:安装在压力壳内,驱动杆组件从钩爪组件的内孔穿过。
它由下列零部件组成:驱动杆、可拆卸接头、拆卸杆等零件组成。
驱动杆的外圆车有环形槽,以便于钩爪啮合。
驱动杆约7米长,直线度要求2/2500。
2、驱动杆组件三、控制棒驱动机构主要结构与功能2、驱动杆三、控制棒驱动机构主要结构与功能3、耐压壳组件功能:为钩爪组件提供机械支撑和驱动杆组件提供运动行程空间;位置:耐压壳安装在压力容器顶盖的管座上,它与管座之间采用梯形螺纹连接和小Ω密封环焊接密封。
一期连接为法兰密封M310连接为Ω密封环焊接密封三、控制棒驱动机构主要结构与功能耐压壳由两部分组成:上段为驱动杆行程套管组件,下段为密封壳组件,壳内充满一回路系统压力下的反应堆冷却剂。
所以耐压壳也是反应堆冷却剂系统压力边界的组成部分。
3、耐压壳组件三、控制棒驱动机构主要结构与功能三、控制棒驱动机构主要结构与功能3、耐压壳组件耐压壳外安装电磁线圈组件和棒位探测器组件,并为这2个组件提供支撑。
驱动杆行程罩顶端采用端塞密封,端塞上安装有排气孔,供一回路系统充水排气期间使用。
端塞上还安装有吊环螺栓,用于安装期间吊起整个驱动机构。
吊装压力容器顶盖时,耐压壳与它连为一体同时吊装。
三、控制棒驱动机构主要结构与功能4、电磁线圈组件功能:接收控制和保护信号,按照规定的程序进行通电和断电,产生电磁力带动钩爪组件动作,从而实现驱动杆上下运动、保持、或事故情况下落棒。
位置:线圈组件安装在驱动机构密封壳的外部。
三、控制棒驱动机构主要结构与功能4、电磁线圈组件它由电磁线圈、线圈磁轭和导线管、电连接器等零件组成。
共计有提升、传递、保持三个电磁线圈,线圈是由双层玻璃丝绝缘的圆铜线绕制的,设计运行温度是200℃,正常工作温度在120℃左右。
三、控制棒驱动机构主要结构与功能4、电磁线圈组件电磁线圈通过电连接器和电缆与棒控系统连接,当电磁线圈按照给定的程序通电或断电时,钩爪组件带动驱动杆组件及其连接的控制棒组件上下运动、保持或落棒。
线圈磁轭的作用:给线圈提供机械保护、散热、构成磁通道。
三、控制棒驱动机构主要结构与功能4、电磁线圈组件电磁线圈由RAM系统的电动发电机独立供电。
输出电压为交流260V,发电机上带有惰转飞轮,在电网瞬时故障时可通过惰转飞轮维持1.2S向线圈供电,避免控制棒下落。
在15.875mm距离及工作温度状况下,电磁线圈在提升控制棒时,需要克服控制棒组件重力、驱动杆重力、摩擦力、水阻力等各项合力,经过计算和试验结果,电磁提升力约为1602N,提升时需要约为电流40A,吸合后电流保持在16A左右。
由于线圈属于感性负载,通电时会产生反电势,所以真正的电流时序图不会是直线。
三、控制棒驱动机构主要结构与功能5 棒位探测器组件功能:探测出控制棒当前所在位置,在全行程落棒时,可用于测量控制棒组件的落棒曲线和落棒时间。
位置:棒位探测器组件安装在驱动行程套管组件外面,不承受压力,常压。
棒位探测器由探测线圈及内外套管等零件组成,内外套管为棒位探测器线圈提供支撑和保护。
三、控制棒驱动机构主要结构与功能5 棒位探测器组件棒位线圈由一个初级和33个次线圈组成。
初级线圈覆盖整个驱动杆行程,电流约为1.7A左右。
33个次级为短线圈,其中有31个为测量线圈,他们均匀分布在初级线圈上,每个线圈间隔(127mm),2个补偿线圈为补偿线圈,分别布置在初级线圈顶部和底部。
三、控制棒驱动机构主要结构与功能5 棒位探测器组件刘少华测试次级线圈按照葛雷码逻辑关系组成5组编码(A/B/C/D/E),当驱动杆在棒行程罩内移动时,改变了磁极位置圈的磁场,由此产生一个正比于控制棒高度的信号,通过解码可指示控制棒当前所在位置。
其优点是抗干扰能力强,不会受温度或磁场变化而影响测量精度。
棒位探测器通过电连接器和抗辐射电缆与棒位指示系统连接,棒位指示系统对棒位探测器的电信号进行处理后,可以直接显示控制棒的实际位置。
三、控制棒驱动机构主要结构与功能5 棒位探测器组件葛雷码逻辑关系组成5组编码(A/B/C/D/E)刘少华测试功能:减少反应堆热量向控制棒驱动机构传递,减少管座壁的内外温差。
位置:安装在压力容器顶盖的控制棒驱动机构管座内。
隔热套管组件由隔热套和导向罩等零件组成,当压力容器顶盖扣盖时,为驱动杆组件插入耐压壳导向。
6 隔热套管组件三、控制棒驱动机构主要结构与功能6 隔热套管组件三、控制棒驱动机构主要结构与功能该图是焊接在M310机组RPV顶盖的结构图,对于组件的垂直度、同心度要求严格,以保证控制棒驱动机构安装时达到最小偏差。
管座外部为美标梯形螺纹,用于安装定位,管座材料选用Z2CN19-10,属于控氮材料。
梯形螺纹最大直径150mm,最小直径142mm由压力容器顶盖,CRDM 管座法兰、隔热罩,导向罩等零件组成堆顶组件,当压力容器顶盖扣盖时,能够准确为驱动杆组件插入耐压壳进行导向。
CRDM中部Ω在工厂进行焊接,下部Ω环缝在现场采用下部自动焊接机进行焊接。
7 堆顶组件三、控制棒驱动机构主要结构与功能CRDM管座法兰CRDM管座实物照片,右图为加工完成,渗透PT探伤合格产品。
下图可以看到管座上的下部Ω焊缝、梯形螺纹。
三、控制棒驱动机构主要结构与功能四、与控制棒驱动机构运动相关主要部件我们要想了解控制棒驱动机构动作原理,首先相应的了解与他相关部件或设备。
1、控制棒组件在反应堆运行中,控制棒驱动机构是与控制棒组件连接在一起,是通过驱动杆可拆卸接头与控制棒组件的星形架相连的。
控制棒组件用于快速反应性,区别于反应堆冷却剂硼水慢性控制的工作原理,属于独立的快速反应性控制系统。
关于控制棒的分组、物理特性等不在本次学习范畴。
四、与控制棒驱动机构运动相关主要部件控制棒组件由星形架和24根控制棒组成(一期为18根),总长度为4088mm,如图所示。
驱动机构如何带动柔软的控制棒在反应堆中正常进行上下运动的,是由导向筒和导向管组成的控制棒驱动线,驱动机构就是带动控制棒在驱动线内进行上下运动。
2、控制棒驱动线四、与控制棒驱动机构运动相关主要部件控制棒导向筒如图,导向筒属于堆内构件的一个部件,位于反应堆内上部,控制棒导向筒共有61个,它允许控制棒组件(包括星形架和24根吸收棒)在其内上下运动,为控制棒组件提供定位和导向。
2.1 控制棒导向筒四、与控制棒驱动机构运动相关主要部件导向筒分上部导向组件和下部导向组件两部分,二者采用法兰相连接,固定在导向筒支承板上,下部导向筒的底部有两个定位销插在堆芯上栅格板的对应定位销孔中,进行定位作用(见A-A)。
2.1 控制棒导向筒四、与控制棒驱动机构运动相关主要部件四、与控制棒驱动机构运动相关主要部件2.1 控制棒导向筒加工成型的下部导向筒控制棒导向管属于核燃料组件的部件,燃料组件为AFA 3G17×17 型(方形,一期为6角形)2.2、控制棒导向管四、与控制棒驱动机构运动相关主要部件每个组件有264根燃料元件棒、24根控制棒导向管和一根堆内测量导管,它们按17×17排列成正方形栅格,共有289个元件棒位。