一种人工神经网络云分类方法的改进与应用
人工智能基础(习题卷28)

人工智能基础(习题卷28)第1部分:单项选择题,共50题,每题只有一个正确答案,多选或少选均不得分。
1.[单选题]在线性回归中,对回归系数的显著性检验采用()A)Z检验B)T检验;$F检验C)χ2检验答案:B解析:2.[单选题]人和机器最大的区别是什么?A)能动性B)人性C)思维D)计算答案:B解析:3.[单选题]启发式搜索是寻求问题( )解的一种方法A)最优B)一般C)满意D)最坏答案:C解析:4.[单选题]Prolog语言的三种基本语句是: 。
A)顺序、循环、分支B)陈述、询问、感叹C)事实、规则、询问D)肯定、疑问、感叹答案:C解析:5.[单选题]聚类方法主要选择( ),可以起到去除凸起点云的目的,为后续计算抓取点带来更准确的结果。
A)靠拢B)分离C)区域生长D)标注答案:B解析:6.[单选题]常见的图像预处理方法不包括( )。
A)图像降噪B)图像增强解析:图像预处理的主要目的是消除图像中无关的信息,恢复有用的真实信息,主要包 括去噪、对比度增强。
图像尺寸归一化也是为了增强对比度。
图像标注是图像处理方法。
7.[单选题]下面说法正确的是?A)梯度下降有时会陷于局部极小值,但EM算法不会。
B)SVM对噪声鲁棒。
C)当训练数据较多时更容易发生过拟合。
D)给定n个数据点,如果其中一半用于训练,另一半用于测试,则训练误差和测试误差之间的差别会随着n的增加而减小。
答案:D解析:8.[单选题]电力、石、天然气以及水利部门对无人机最普遍的应用是( )。
A)测绘B)监测C)架线与选线D)救援答案:C解析:9.[单选题]Jupyter notebook的记事本文件扩展名为:A)mB)pyC)pycD)ipynb答案:D解析:10.[单选题]有一个 28x28 的图片,并使用输入深度为 3 和输出深度为 8 在上面运行一个 3x3 的卷积神经网络。
注意,步幅是 1,你正在使用相同的填充(padding)当使用给定的参数时,输出特征图的尺寸是多少?( )A)13 宽、13 高、8 深B)28 宽、28 高、8 深C)13 宽、28 高、8 深D)28 宽、13 高、8 深答案:B解析:11.[单选题]下列哪一个不是神经网络的代表()A)卷积神经网络B)递归神经网络C)残差网络D)xgboost算法答案:D解析:xgboost算法属于决策树12.[单选题]植保无人机植保作业的时候,以下哪项是不需要事前确认的( )。
融合注意力机制与神经网络的三维点云分类算法

融合注意力机制与神经网络的三维点云分类算法随着三维视觉技术的不断发展,三维点云数据在各种领域中得到了广泛的应用。
点云分类是其中一项重要的任务,其目标是将三维点云数据划分到不同的预定义类别中。
在过去的几年中,深度学习和神经网络的迅猛发展为点云分类提供了新的解决方案。
本文将介绍一种新颖的三维点云分类算法,该算法融合了注意力机制和神经网络,提高了分类的准确性和性能。
一、引言点云数据是由大量的三维坐标点组成的集合,代表了物体的表面或环境的形状。
点云分类的目标是将这些点根据其特征属性划分到不同的类别中。
传统的点云分类方法通常依赖于手工设计的特征提取和分类器。
然而,这些方法在处理复杂的点云数据时存在着很大的局限性。
二、相关工作近年来,基于神经网络的点云分类算法逐渐成为研究的热点。
其中,图卷积神经网络(Graph Convolutional Network,GCN)被广泛应用于点云分类中。
GCN通过有效地捕捉点云数据的拓扑结构和局部关系,取得了良好的分类效果。
然而,GCN忽略了不同点之间的重要性差异,这导致一些关键信息可能被忽略或混淆。
三、融合注意力机制的神经网络为了解决GCN中的问题,我们提出了一种融合注意力机制的神经网络。
该网络通过引入注意力机制,使得网络能够自动学习并重点关注对分类任务更重要的点。
具体而言,我们设计了一个注意力模块,在每个点的特征提取阶段计算出每个点的注意力权重。
通过乘以注意力权重,网络能够自动筛选出对分类任务更有价值的特征信息。
四、网络结构我们的网络结构包括三个主要部分:特征提取层、注意力模块和分类器。
特征提取层用于从原始的点云数据中提取有意义的特征表示。
注意力模块通过计算每个点的注意力权重来引导网络的学习过程。
分类器将注意力加权后的特征传递给最终的分类层,完成点云的分类任务。
五、实验与结果我们在公开的三维点云分类数据集上进行了实验,与其他几种常用的点云分类算法进行了比较。
实验结果表明,我们提出的融合注意力机制与神经网络的点云分类算法在准确性和性能方面都取得了显著的提升。
人工神经网络算法研究及应用
它的 出现 为一 些难 以解 决 的 问题 提供 了一种 新 的 思路 , 而神 经 网络 目前 还 面 临一 些 问题 。 文在 然 本 对神 经 网络 进 行 深 入研 究 的基 础 上 , 出现 有 算 法的 一 些 改进 方 案 , 将 其应 用 于 S L协 议 及 其 提 并 S
算法 的 改进 中 。 关 键 词 : 经 网络 ; P算 法 ; 神 B 变步长 ; 制 器 ; S 控 S L协议 中 图分类 号 : 1 3 TP 8 文 献标 识码 : A
户 方 的延 时 。
1 B P算 法 及 其 改 进
B P算 法 是 神 经 网 络众 多算 法 中应 用 最 为 广泛 的一种 [ , 的典 型结 构 为三层 前 向 网络 。第 z 3它 ] 层神
经元 的输 人 为 :
V 一, ∑ Wi_ 一 ; ( j ̄ ) V。
式 中 W 为 z 神 经 元 与 z 1 神 经 元 i 层 一 层 的 连 接权 值 ; 1为第 z - 一1层 神经 元 i 的输 出 ; n为第 z 一1层 神经 元数 ;i 0 为神 经元 的 阈值 。 用 函数 , 作
Ab t a t Ne r lNe wo k s a ne c nt o t o i h sm ul t s h s r c : u a t r i w o r lme h d wh c i a e uma S b ai I o de w n’ r n. tpr vi s a ne wa n no ln a on r . I hi pe y i n—i e r c t o1 n t s pa r,BP l ort m s i p o e o te r o ma e The mod fe a g ih i m r v d f r be t r pe f r nc . iid BP l rt a go ihm s a ple o SSL ot olt e c h i e dea i p id t pr oc o r du e t e tm l y. Ke r s: u a t y wo d ne r lne wor s;BP l o ih ;v ra e s e k ag rt m a i bl— t p;c nt ole ;SSL r t c 1 o r lr p o o o
最新 BP神经网络算法及其改进的几个方法-精品
BP神经网络算法及其改进的几个方法1 概述人工神经网络(Artificial Neural Networks,ANN),是基于人类大脑的生物活动所提出的,是一个模型。
它由众多节点通过一定的方式互联组成,是一个规模巨大、自适应的系统。
其中有一种学习算法是误差传递学习算法即BP 算法。
BP算法是人工智能最常用到的学习方法,从一定意义上来讲,BP算法的提出,终结了多层网络在学习训练算法上的空白史,是在实际应用中最有效的网络训练方法,对ANN的应用和发展起到了决定性的作用。
BP算法是使用从输出层得到的误差来估算前一层的误差,再利用该误差估算更前一层的误差。
依次进行,就会获得其他所有各层的估算误差。
这样就实现了将从输出层的得到误差沿着与输入信号传送相反的方向逐级向网络的输入端传递的过程[1]。
但是,BP算法也存在着不可忽视的缺陷。
基于此,该文总结介绍了BP的改进方法。
2 BP算法的基本思想2.1 BP算法的基本原理BP算法是有监督指导的算法,它的学习训练过程一般分为两步:首先是输入样本的正向传递;第二步误差的反向传递;其中信号正向传递,基本思想是样本值从输入层输入,经输入层传入隐藏层,最后通过输出层输出,中间层对样本数据进行处理操作,利用各层的权值和激活函数对数据进行操作然后在输出层获得输出[2];接下来就是反向传递,算法得到的实际输出值与期望目标输出之间必然会有误差,根据误差的大小来决定下一步的工作。
如果误差值较小满足训练的精度要求,则认为在输出层得到的值满足要求,停止训练;反之,则将该误差传递给隐藏层进行训练,按照梯度下降的方式,对权值和阈值进行调整,接着进行循环,直到误差值满足精度要求停止训练[3]。
3 BP算法的缺陷尽管BP算法有着显著的优点,但是在实际应用过程中,BP算法会出现很多问题。
尤其是下面的问题,对BP神经网络更好的发展有很大影响。
有的甚至会导致算法崩溃。
3.1 收敛速度的问题BP算法在进行训练学习时,收敛速度慢,特别是在网络训练达到一定的精度时,BP算法就会出现一个长时间的误差“平原”,算法的收敛速度会下降到极慢[4]。
人工智能基础概念习题(含答案)
人工智能基础概念习题(含答案)一、单选题(共60题,每题1分,共60分)1、在数据产品研发的过程中,以下()属于低层次数据。
A、一次数据B、三次数据C、二次数据D、零次数据正确答案:D2、在人工神经网络算法中,不属于实现“人工神经元”的方法的有()。
A、感知器B、线性单元C、Sigmoid单元D、Untied单元正确答案:D3、下列哪项不是构建知识图谱用到的主要技术()A、关系抽取B、命名实体识别C、词性标注D、实体链接正确答案:C4、以下关于机器学习说法错误的是A、机器学习可以解决图像识别问题B、监督学习和非监督学习都属于机器学习C、机器学习在一定程度上依赖于统计学习D、目前机器学习已经可以代替人类正确答案:D5、图像识别任务可以分为三个层次,根据处理内容的抽象性,从低到高依次为A、图像分析,图像处理,图像理解B、图像分析,图像理解,图像处理C、图像理解,图像分析,图像处理D、图像处理,图像分析,图像理解正确答案:D6、2010年谷歌推出以顶点为中心的图处理系统(),其专为大规模图数据处理而设计,将图数据保存在主存储器中并采用并行计算的BSP模型A、PregelB、DregelC、CregelD、Aregel正确答案:A7、()是人工智能地核心,是使计算机具有智能地主要方法,其应用遍及人工智能地各个领域。
A、深度学习B、智能芯片C、机器学习D、人机交互正确答案:C8、标准AdaBoost只适用于()任务A、二分类B、分类C、回归D、多分类正确答案:D9、阿尔法狗是第一个击败人类职业围棋选手、第一个战胜围棋世界冠军的人工智能程序,它的主要工作原理是什么?A、深度学习B、卷积神经网络C、机器学习D、BP神经网络正确答案:A10、下列选项中,不属于生物特征识别技术的是()A、声纹识别B、文本识别C、步态识别D、虹膜识别正确答案:B11、对学习器的泛化性能进行评估,不仅需要有效可行的实验估计方法,还需要有衡量模型泛化能力的评价标准,这就是()。
一种改进的SSD目标检测算法

R-CNN米用selective search提取候选区域,然后进
行特征提取,用获得的特征进行分类,用非极大
值抑制和边界框回归进行精确检测。Fast R-CNN 是在R-CNN的基础上,进行了相关改进,将特征
提取、区域分类等融合在一起,将分类与回归同 时训练,极大地提升了训练中的空间耗费问题,
DSSD
ResNet-101 300x300 78.6
STDN DenseNet-169 300x300 78.1
FSSD
VGGNet 300x300 78.8
FP Reconfig VGGNet 300x300 79.6
于特征金字塔融合方法和级联检测器的两类方 法。特征金字塔融合方法主要有FPN⑵、TDM⑶、 DSSD [ 41FSSD⑸和FP Reconfig⑹,该类方法通 过将语义更深的特征聚集到较浅的层次来解决 小目标检测中的模糊性,通常,从主干中提取的 一组特征映射跨尺度融合在一起,产生金字塔式 的表示,在此基础上进行后续的检测操作。最早 Lin等人提出了特征金字塔网络(Feature Pyramid Network,FPN ),该网络通过迭代上采样和像素加 法,将较高层次的判别特征融合到较低层次上, 融入高层的语义信息和低层的位置信息。在此基
•108 -
础上,提出了TDM,将融合操作由像素加法改为
像素级联。除了这两项基础工作外,还提出了一
些更为复杂的特征金字塔融合方法,如FSSD重构
了特征金字塔,通过把网络中某些特征进行尺度 调整,特征图较小的层进行上采样来统一到同一
尺寸,并通过级联对特征连接。DSSD算法通过利
用上下文信息和反卷积操作,单向融合了低层特
利用SOM神经网络实现逆向工程中区域自动分割
图3
侧 向抑制图
R 中球面 S = { ( x , y , z ) | x + y + 1 = 2 , 平均曲率 K M = r
3
2
2
进行归一化处理 , 则评价函数可以采用输入向量 p k 和权重向量 w j 的欧氏距离 . 对于所有的 j 比较各个 欧氏距离 , 欧氏距离最小者所对应的神经元, 即为获 胜神经元 C . 网络训练好后 , 当有相近的输入模式出 现时, 某个神经元就会兴奋起来 , 表明该神经元已经 认识了这个模式. ( 2) 权重向量的自适应更新过程 当输入向量 p k 被提交给 SOM 网络后, 获胜神 经元 C 的权重 W C 和其邻域内的神经元将向 p k 移 动. 在输入向量 p k 被多次提交给 SOM 网络后, 邻域 N C ( t ) 内的神经元将通过学习而拥有彼此相似的学 习向量, 如图 4 所示 .
k i1
即寻找与每一 个数据点距离最近的 k 个数据 点, 记为 K - Nb . 寻找的方法是通过划分立方体的 包围盒, 在每一个点邻近的 27 个包围盒中搜索 . 包 围盒的大小是影响搜索效率的重要因素, 包围盒太 大会导致每个包围盒中的点数过多, 搜索和排序会 导致计算效率较低. 假设包围空间点云的最小长方体的范围为: [ x m in , x max ; y m in , y m ax ; z min , z max ] 则长方体的长、 宽、 高可以分别表示为 L x = x max - x m in L y = y max - y m in L z = z max - z m in 进一步假设立方体的边长为 L , 为使每个立方 体中包含 k 个点, 则 L 应满足 Lx 进而得到
1 1 1
Abstract: Self org anizing map ( SOM ) netw ork w as used to ex plore t he calculation method o n the point cloud auto - segmenta tion in reverse engineering. First, SO M study ing course was in troduced and method for co mputing sur face information based on scattered 3D point - cloud data w as improved. T hen, an eight di mensional vector w as proposed as t he input for SOM network, in line wit h the computed surface infor matio n segmentation in r ev erse engineering with SOM network was further r ealized. Ex periments show the validity of the proposed method. Key words: reverse eng ineering; segmentation; self organizing map ( SOM ) networ k
PCU-Net:基于改进PCN_的点云补全均匀算法

doi:10.3969/j.issn.1003-3106.2023.06.005引用格式:郎超豪,甘兴利,施浩.PCU Net:基于改进PCN的点云补全均匀算法[J].无线电工程,2023,53(6):1269-1274.[LANGChaohao,GANXingli,SHIHao.PCU Net:PointCloudCompletionDenseAlgorithmBasedonImprovedPCN[J].RadioEngineering,2023,53(6):1269-1274.]PCU Net:基于改进PCN的点云补全均匀算法郎超豪,甘兴利,施 浩(浙江科技学院信息与电子工程学院,浙江杭州310023)摘 要:激光雷达采集的点云数据往往是稀疏且无序的。
对于需要通过处理三维点云的研究来说,直接处理激光雷达采集的数据容易产生差错,需要对采集的点云进行预处理。
现有算法致力于恢复点云的拓扑结构,忽略了稀疏的点云容易丢失特征信息。
针对上述问题,提出了一个神经网络,可以将原来残缺、稀疏的点云生成为完整、密集、均匀的点云,称为点云补全均匀化网络(PointsCompletionUniformNet,PCU Net)。
该网络基于点云补全网络(PointCompletionNetwork,PCN)引入了一种能够快速提取全局特征的轻量化结构,并在解码器中补全和稠密化点云。
还提出了一种精炼器模块,从输入中保留原始细节,通过最远点采样(FarthestPointSampling,FPS)和点特征残差网络均匀化点云。
在开源数据集Visionair上通过实验对比,该算法在点云补全上较目前主流补全算法有所提升,并在点云均匀化和稠密化上取得良好的效果。
关键词:三维点云;稠密算法;补全算法;点云均匀化中图分类号:TP391文献标志码:A开放科学(资源服务)标识码(OSID):文章编号:1003-3106(2023)06-1269-06PCU Net:PointCloudCompletionDenseAlgorithmBasedonImprovedPCNLANGChaohao,GANXingli,SHIHao(SchoolofInformationandElectronicEngineering,ZhejiangUniversityofScienceandTechnology,Hangzhou310023,China)Abstract:Thepointclouddatacollectedbylidarisoftensparseanddisordered.Fortheresearchthatneedstoprocessthree dimensionalpointclouds,itistomakemistakesbydirectlyprocessingthedatacollectedbylidar,soitisnecessarytopreprocessthecollectedpointclouds.Theexistingalgorithmsfocusonrestoringthetopologyofpointclouds,whileignoringthatsparsepointcloudsarepronetolosefeatureinformation.Tosolvetheaboveproblems,aneuralnetworkisproposed,whichcangenerateacomplete,denseanduniformpointcloudwhichcalledPointsCompletionUniformNet(PCU Net)byusingtheoriginalincompleteandsparsepointcloud.Inthisnetwork,basedonPointCompletionNetwork(PCN),alightweightstructureisintroducedtoextractglobalfeaturesquicklyandcompleteanddensifythepointcloudinthedecoder.Inaddition,arefinermoduleisproposed,whichpreservestheoriginaldetailsfromtheinputandunifiesthepointcloudthroughthefarthestpointsamplingandthepointfeatureresidualnetwork.ThroughexperimentalcomparisononVisionairopensourcedataset,thepointcloudcompletionisimprovedbytheproposedalgorithmcomparedwiththecurrentmainstreamcompletionalgorithm,andtheproposedalgorithmcanachievegoodresultsinpointcloudhomogenizationanddensification.Keywords:3Dpointcloud;densealgorithm;completionalgorithm;pointcloudhomogenization收稿日期:2022-12-15基金项目:国家自然科学基金(62101088)FoundationItem:NationalNaturalScienceFoundationofChina(62101088)0 引言三维点云处理广泛应用于路径规划、自动驾驶等领域。
KNIME在生产质量管理中的图像挖掘

1KNIME 概况生产质量的图像挖掘是从海量的图像数据中挖掘出有效的模型、关联、规则、变化、不规则规律,用以改善生产质量和管理过程。
智能工厂对图像数据的处理能力要求很高,因此图像挖掘在智能工厂生产质量管理的运用将成为工厂升级发展的新方向。
智能工厂最常见的内部目标就是提高产品质量和资产利用率。
以风力涡轮机为例,利用图像识别与机器学习技术,通过运算算法进行分析,可以让质量控制过程实现自动化,从而快速识别生产异常。
文章选取KNIME 数据挖掘软件,通过案例验证软件在图像挖掘中的适用范围。
内容考虑基于以下问题:①KNIME 在生产质量管理的图像挖掘领域有哪些潜力?②哪种算法适用于生产质量管理的KNIME 图像挖掘?2基本概念考虑KNIME 软件在生产质量管理的图像挖掘潜力问题,需要将图像挖掘结果对智能工厂的影响作为参考条件,有效提高智能工厂的效率,可以理解为KNIME 软件在图像挖掘上的潜力。
因此,需要架构一个图像挖掘应用流程对问题进行分析。
本文对概念进行分析,并依据概念构成实验模型。
2.1图像挖掘简介图像数据挖掘是挖掘大规模图像数据中隐含的知识、图像内或图像间的各种关系,以及其他隐藏在图像数据中的模式技术[1];它是计算机视觉、图像处理、数据挖掘、模式识别、人工智能等多个学科交叉的研究领域。
人们对图像挖掘研究主要是挖掘系统的建立和挖掘算法的使用,通过使用不同的算法对数据进行分析[2]。
常用的算法分类如图1所示。
如图2所示,图像数据挖掘在过程模型中分为预处理、转换、挖掘、解释和评估等阶段。
先对数据进行预处理提高图像质量,然后转换数据,方便下一步通过选定的分析方法挖掘图像数据,最后应用适当的模式识别并解释结果,生成知识。
2.2算法随着科技的发展,图像挖掘技术已成熟地应用于车辆跟踪与检测、违章检测、事故检测等。
卡斯滕·费尔登设计的交通挖掘系统可由图像分析系统和知识发现系统构成[3]。
图像分析系统利用K-均值聚类算出每一帧图像的质心,连接连续图像的相关质心形成车辆的运动轨迹。
RBF神经网络模型在遥感目标检测中的应用

RBF神经网络模型在遥感目标检测中的应用随着遥感技术的不断发展,遥感图像的应用越来越广泛,其中遥感目标检测在土地利用、资源调查、环境监测等领域起着越来越重要的作用。
传统的遥感目标检测方法主要基于像元级的图像处理技术和统计分析方法,这些方法往往需要较多的人工干预和专业知识,缺乏普适性和准确性。
因此,使用人工智能的方法进行遥感目标检测成为研究热点之一。
本文将介绍一种基于径向基函数(RBF)神经网络模型的遥感目标检测方法。
RBF神经网络是一种常用的人工神经网络模型,其基本原理是通过将特征空间转换成高维空间,在高维空间中使用线性方法对数据进行分类。
在实际运用中,RBF神经网络模型能够较好地处理非线性问题,具有较高的泛化能力和预测精度。
本文基于RBF神经网络模型将遥感图像进行分类,具体步骤如下:首先,将遥感图像进行预处理,包括图像直方图均衡化、滤波和降维等。
这些预处理方法能够有效地去除图像噪声、增强图像边缘等,为后续的遥感目标检测建立了基础。
其次,提取特征并进行特征选择。
在遥感图像中,常用的颜色、纹理、形状等特征具有很好的分类性能。
通过特征提取和特征选择,可以减少特征数量和冗余度,提高分类算法的精度和效率。
最后,使用RBF神经网络对特征进行分类,得到遥感图像中不同目标的分布情况。
在训练过程中,可以通过交叉验证等方法对网络参数进行调整,进一步提高分类算法的精度和稳定性。
在实际应用中,可以使用软件工具如MATLAB、Python等实现RBF神经网络。
本文中基于RBF神经网络模型的遥感目标检测方法具有以下优点:1.较好的泛化能力。
RBF神经网络通过高维空间的转换,能够有效地处理非线性问题,具有较高的泛化能力和预测精度,在遥感目标分类中具有广泛的应用前景。
2.较快的分类速度。
RBF神经网络模型具有快速的收敛速度和低计算复杂度,能够在较短时间内处理大量的遥感图像数据。
3.良好的适应性。
RBF神经网络模型能够灵活地适应不同的遥感图像数据和应用场景,可以通过调整网络参数和输入特征进行定制化设置,提高分类效果和处理速度。
人工智能在计算机网络技术中的应用探讨

I G I T C W技术 应用Technology Application126DIGITCW2024.02计算机网络技术是信息化时代必不可少的一项技术,它的发展直接决定了整个信息技术行业的进步方向[1]。
同时,随着人工智能技术的不断发展,越来越多的人开始将人工智能技术应用到计算机网络技术中[2]。
本文旨在通过对人工智能技术的介绍和分析,探讨人工智能在计算机网络技术中的应用现状和未来趋势。
1 人工智能的基本概念人工智能(Artificial Intelligence ,AI )是指计算机通过模拟人类的智能行为和思维方式,从而使计算机具有感知、认知、学习、决策等智能能力的一种技术。
它是一项综合性的技术,包括了机器学习、自然语言处理、计算机视觉等多个方面。
人工智能技术的发展对整个计算机行业的应用和发展产生了重要影响,尤其在计算机网络技术领域中的应用更是显著。
应用人工智能技术,可以实现对计算机网络中海量数据的处理和分析,提高网络运作效率和安全性,为网络管理和优化等提供更好的解决方案。
同时,也可以借助人工智能技术来帮助识别和防范网络威胁,提高网络安全保障水平。
2 人工智能在计算机网络技术中的应用 现状2.1 网络安全领域人工智能技术的应用为网络安全提供了有力支持。
由于当前网络威胁形式多样化,传统的安全防护手段已经难以满足安全防范的需要。
而人工智能技术可以通过机器学习和数据挖掘等方式对大量的网络攻击数据进行分析,寻找规律和模式,预测新型威胁,从而有效地降低网络安全风险。
首先,应用人工智能技术可以建立基于行为模式的检测系统。
这种系统可以基于对历史数据分析,对正常和异常行为进行分类,从而识别恶意IP 地址、爬虫或者DDoS 攻击等,对网络攻击进行及时感知和自适应防御[3]。
例如,采用深度学习算法,可以训练神经网络来识别不同类型的网络攻击,并通过定时更新算法和模型来保证检测系统的效果和准确性。
其次,人工智能技术还可以通过机器学人工智能在计算机网络技术中的应用探讨王于哲(福州英华职业学院,福建 福州 350001)摘要:文章介绍了人工智能的基本概念,阐述了人工智能在网络安全、网络优化和网络管理领域等方面的应用现状。
B-P神经网络改进及其在Matlab中应用程序发布的研究
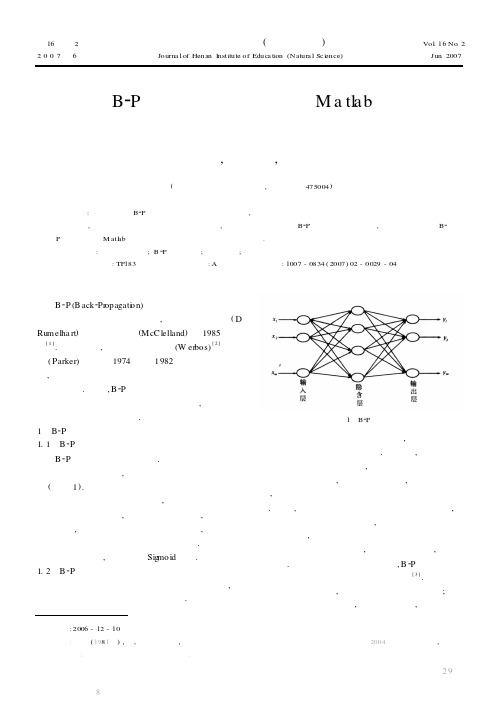
第16卷第2期河南教育学院学报(自然科学版)Vol .16No .22007年6月Journa l of Henan Institute of Educa tion (Natura l Sc i ence)Jun .2007收稿日期:2006-12-10作者简介陈郁(8—),女,河南郑州人,河南大学环境与规划学院地图学与地理信息系统专业级硕士研究生,研究方向地理信息系统软件开发与应用B 2P 神经网络改进及其在M a tl ab 中应用程序发布的研究陈 郁,秦 奋,余明全(河南大学环境与规划学院,河南开封475004) 摘要:主要讨论了B 2P 神经网络的结构、算法及不足,列举了一些关于训练时间长、出现局部极小值等问题的改进方法,分析了各种改进方法及其改进的效果,还选取了几种可以与B 2P 算法相结合的算法,最后以实例说明B 2P 神经网络在M atl ab 中的实现及发布成独立应用程序的过程.关键词:人工神经网络;B 2P 神经网络;算法改进;独立应用程序中图分类号:TP183 文献标识码:A 文章编号:1007-0834(2007)02-0029-04 B 2P (B ack 2Pr opagati on)模型是一种用于前向多层神经网络的反传学习算法,由鲁梅尔哈特(D Rum elha rt )和麦克莱伦德(McC lelland )于1985年提出[1].在此之前,虽然已有韦伯斯(W er bos)[2]和派克(Parker)分别于1974年及1982年提出过类似算法,但只有在鲁梅尔哈特等提出后才引起了广泛的重视和应用.目前,B 2P 算法已成为应用最多且最重要的一种训练前向神经网络的学习算法,亦是前向网络得以广泛应用的基础.1 B 2P 神经网络1.1 B 2P 神经网络的结构B 2P 算法常用于多层网络.网络中不仅有输入层节点及输出层节点,而且还至少有一层隐含层节点(如图1).当所有信息向网络输入时,信息首先由输入层节点传至隐含层节点,经特性函数作用后,再传至下一隐含层,直到最终传至输出层进行输出,其间每经过一层都要由相应的特性函数进行变换.节点的函数要求是可微的,通常选用Sig moid 函数.1.2 B 2P 算法的学习过程学习的目的是对网络的连接权值进行调整,使得对任一输入都能得到所期望的输出.学习的方法图1 B 2P 网络是用一组训练样例对网络进行训练,每一个样例都包括输入及期望的输出两部分.训练时,首先把样例的输入信息输入到网络中,由网络自第一个隐层开始逐层地进行计算,并向下一层传递,直至传至输出层,其间每一层神经元只影响到下一层神经元的状态.然后,以其输出与样例的期望输出进行比较,如果它们的误差不能满足要求,则沿着原来的连接通路逐层返回,并利用两者误差按一定的原则对各层节点的连接权值进行调整,使误差逐步减小,直到满足为止.由上述训练过程不难看出,B 2P 算法的学习过程是由正向传播与反向传播组成的[3].正向传播用于进行网络计算,对某一输入求出它的输出;反向传播用于逐层传递误差,修改连接权值,以使网络能8:1912004:.92进行正确的计算.一旦网络经过训练用于求解现实问题,则就只需正向传播,不需要再进行反向传播.1.3 传统B2P算法的不足B2P算法是一个有效的算法,许多问题都可以用它来解决.由于它具有理论依据坚实、推导过程严谨、物理概念清晰及通用性好等优点,至今仍然是前向网络学习的主要算法.但B2P算法也存在一些不足之处,主要有:训练时间长,出现局部极小值,网络结构难以确定,新加样例影响已有结果,完全不能训练.2 B2P算法的改进虽然B2P网络是应用最多的一种神经网络,但它仍存在一些缺陷,不少学者一直致力于对其算法和结构的改进.2.1 训练时间过长的改进方案金丕彦、胡金滨[4]都采用了学习系数η的自适应调整来解决训练时间过长的问题,但各自依据的公式是有所不同的.刘国东、张文鸽、吴泽宁等[5]采用的是原始数据的非线性规格化,用公式将初始值进行线性规范化至[0.2,0.8]区间内,这样做可以大大加快网络学习速度.刘刚[6]采用了初始权重与偏差随机化的Nguyen2W idr ow法(简称N2W法)并指出,较多计算表明N2W法对计算效率的提高有较明显的效果.杨兴江[7]分别使用了S函数输出限幅算法和累积误差校正算法.实验表明,当学习模式对较少时,累积误差逆传播算法比标准误差逆传播算法收敛速度要快些.而S函数输出限幅算法,通过限制S函数的输出,使S函数的值不取到“0”或“1”.从而保证每次都进行有效的调整,达到了为了加速收敛的目的.2.2 避免出现局部最小值的改进方案2.2.1 调整连接权值和阈值一般做法是:选择合适的初始权值和阈值或者在训练过程中再进行适当调整,以跳出局部极小区.很多应用文献中都是设置了多种初始值,然后从中选择训练效果最好的一个.应该说,这种方法比较行之有效,也是应用较多的一种方法.杨伟、倪黔东等[8]讨论了权值初始值对网络训练速度的影响,在实际训练中采取了比较法选取,训练时随机产生多个初始权值,训练后选择一个最佳的作为初始权值.2.2.2 调整网络权值修改量η和动量项αH int on和W illia m s于1986年提出了加一个称为“动量”的调整项到连接权公式中.动量法降低了网络对误差曲面的局部调节的敏感性,从而有效地抑制了网络陷于局部极小[]2.2.3 改变网络结构,增加训练数据或隐节点Mez a r d第一个采用网络结构增长的方法解决局部极小问题[10].他提出Tiling算法一层一层地构造网络,通过在每层构造主节点和辅助节点,逐步减小误差,从而收敛到全局极小.向国全等[11]给出了一个以“逐步增加训练数据和隐节点”为特征的避开局部极小的改进方法,即采用逐步逼近的方法.该法规定:当全局误差E停止下降,又非最小值点时,进行扩网,增加一个隐节点,与新增节点相连的权值均为0,原有权值不变,再进行训练.当E小于预定检测值时,中断训练,增加训练数据,逐步逼近.2.3 B2P算法与其它算法的结合2.3.1 B2P算法与退火算法的结合李敏生、刘斌[12]提出一种类似退火算法的修正方案,其本质使网络在长时间不能收敛时,加入随机扰动,使网络逃离局部极小.该步骤的思想如下:在网络误差较长时间未能下降时,使网权值修改量加大,以一定的概率使网络重新处于高收敛系数和动量项的方式下学习,经一段时间后又重新使收敛系数和动量项逐步减少,以期能使网络跳出局部极小,达到收敛.2.3.2 B2P算法与进化规划EP相结合当用B2P算法对神经网络学习进行训练时,如经过一定的学习次数后,误差不满足要求且不再减小,则认为陷入局部最小,立即调用EP算法确定学习速率使学习过程摆脱局部最小,一旦误差减小就停止EP恢复B2P算法继续学习直至误差满足要求[13].2.3.3 B2P算法与遗传算法结合近年来,随着遗传算法的兴起,人们在它们对B2P算法改进方面的研究已取得了长足的进展.遗传B2P网络的主要机理是利用遗传算法全局搜索能力强的特点,先用遗传算法对B2P网络的权值和阈值进行全局粗搜索,定位最优解区域,使得权值和阈值种群聚集在参数解空间的某几处,再用B2P算法分别对其进行梯度细搜索,最终求得最优解.2.4 小结从以上可以看出,试图选择合适初始权值和阈值的尝试取得的效果相对不错.此外,调整网络权值修改量η,动量项α和改进寻优算法的方法也都能在一定程度上改善收敛精度.改变网络结构,固然可以取得一定的效果,却有可能会使计算复杂化,隐节点数的增多也会使误差超曲面变得更加凹凸不平.但是这也不能抹杀这种途径对于改善局部极小问题上所作的贡献在B2算法与其它算法的结合上,我们可以389..P看出两种算法结合后,能够克服各自算法的缺陷,这也是以后B 2P 算法改进研究的一个主要方向.综上所述,从该领域未来研究的方向看,在理论上还没有重大突破以前,及时改变权重初值和正确地选择算法及算法参数是改进B 2P 算法很好的方法.3 B 2P 算法在M a tl a b 中应用程序发布的实现对于B 2P 算法的实现,可以采用Matlab 软件.Ma tlab 是一款功能强大的数学应用软件,神经网络工具箱是Matlab 中集成的一个重要的工具箱,工具箱中提供了丰富的网络学习和训练函数,其中包括了大多数的神经网络算法.Ma tlab 应用程序发布是指将Matlab 开发的算法脱离Ma tlab 环境,与其他高级的开发语言(如VC ++,JAVA 等)混合开发应用程序,实现复杂应用程序的开发.在应用程序发布中,最为重要的工具就是Ma tlab Compiler,它能将Matlab 的M 语言函数文件转变成独立可执行的应用程序、可以发布的应用程序函数库或者是组件,这些应用程序组件能够脱离Ma tlab 环境在不同的平台上应用[14].但是对于神经网络工具箱来说,Matlab Comp iler 对其大部分函数是不支持的,所以要将B 2P 算法用Matlab 发布成独立应用程序,还需要从别的途径入手.神经网络工具箱提供了一个函数gensi m ,可以自动地生成供Si mulink 使用的网络仿真框图.一旦网络已经被建立和训练了,就可以很容易地结合到Si m ulink 模型中.为了改善设计流程中无法直接应用MA T LAB /Si m ulink 的宝贵资源的这一缺陷,MATLAB 公司又提供一个实时代码生成工具Real 2Ti me Workshop (R T W ).RT W 使用户可以直接将Si m ulink 模型转化为实时标准C 代码.于是,就可以通过这个gensi m 函数和RT W 工具来实现基于神经网络工具箱的应用程序发布.具体步骤如下:(1)在人工神经网络工具箱中完全地训练好网络;(2)使用gensi m 函数创建一个在(1)中的已被训练过的网络的Si m ulink 模型;(3)使用R eal 2Ti m e W or kshop 创建一个独立应用程序.以一个简单的BP 网络为例,代码及过程如下:(1)首先设定网络的输入变量P 和目标变量T 及网络的设计(结果如图2),分别为:P =[012345678910];T =[01234321234];%%利用f f 创建一个B 网络,在训练之前,先运行下面的代码net =ne wff ([010],[51],{’tansig ’,’pure 2lin ’});Y =si m (ne t,P );p l ot (P,T,P,Y,’o ’)(2)接下来,对网络进行训练并生成Si m ulink模型:(结果如图3、4)net .trainPa r am.epochs =50;net =tr a in (net,P,T );Y =si m (ne t,P );p l ot (P,T,P,Y,’o ’)%%使用GENSI M 函数建立Si m ulink 模型gensi m (net)图4 使用G ENSI M 函数建立Si mulink 模型(3)在生成的Si m ulink 模型窗口中,先进行参数设置,然后选择菜单栏→T OOLS →Real 2Ti m e W →B ,就可以编译成标准代码,并生成x 文件38ne w P orkshop uild mode l C e e .1B2P网络可以实现输入和输出间的任意非线性映射,这使得它在诸如地价评估、水文预测等领域的研究中具有绝对性优势.而Matlab使得B2P网络的实现和程序发布更为简便、实用.可以相信不断完善B2P算法及Ma tlab日益强大的运算功能,会使B2P 神经网络在更多的领域发挥越来越大的作用.参考文献[1] 王永庆.人工智能原理与方法[M].西安:西安交通大学出版社,1998:423-428.[2] Mag ou l as G D,V rahatis M N,Androulaki s G S.I m p r oving theconvergence of the backp r opagati on al go rithm using l earning rate adap tati on methods[J].Neural Compu t ation,1999(11):1769-1796.[3] Werbos Pau J.B ackp rop agati on through ti me:what it does andhow to do it[J].Proceedings of t he IEEE,1990,78(10):1550-1560.[4] 金丕彦,芮勇.B P算法各种改进算法的研究及应用[J].南京航空航天大学学报,1994(S1):201-206.[5] 张磊,胡春,钱锋.B P算法局部极小问题改进的研究进展[J].工业控制计算机,2004,17(9):33-34,50.[6] 刘刚.一种综合改进的B P神经网络及其实现[J].武汉理工大学学报,2002,24(10):57-60.[7] 杨兴江.B P算法的程序实现与改进[J].阿坝师范高等专科学校学报,2002(2):111-113.[8] 杨伟,倪黔东,吴军基.B2P神经网络权值初始值与收敛性问题研究[J].电力系统及其自动化学报,2002,14(1):20-22. [9] 张文鸽,吴泽宁,逯洪波.B P神经网络的改进及其应用[J].河南科学,2003,21(2):202-206.[10]贺昌政,李晓峰,俞海.B P人工神经网络模型的新改进及其应用[J].数学的实践与认识,2002,32(4):554-561.[11]向国全,董道珍,董继宏.前向网络B P算法的改进算法[J].河南大学学报:自然科学版,1999,29(1):43-47.[12]李敏生,刘斌.B2P学习算法的改进与应用[J].北京理工大学学报,1999,19(6):59-62.[13]陈小平,石玉,于盛林.神经网络中克服局部最小的BP2EP混合算法[J].小型微型计算机系统,2001,22(12):1460-1463.[14]张威.MA T LAB应用程序集成与发布[M].西安:西安电子科技大学出版社,2005.Research on I m provi n g A lgor ithm s of B2P NetworkandPublish i n g Applica tion i n M a tl abCHEN Yu,Q I N Fen,Y U M ingquan(College of E nviron m ent and P lanni ng,H enan U niv ersity,Ka ifeng475004,China)Abstrac t:I ntr oduce s the str uc tur e,a lgorithm s,and disadvantages of the B2P net work briefly.A nd then enume r a tes some m ethods of i mpr oving B2P algorithm s,such as l ong tr a ining ti m e,l ocal m ini m al va lue,etc.Ana lyses these m ethods and the ir ef fect.Selects so m e alg orithm s to i mpr ove the B2P net wor k.A t the last,takes a si mple exa mp le to exp lain the pr ogr e ss of training B2P ne t w ork and publishing a stand2al one app lication inMa tlab.Key wor ds:artificial neural ne t w ork;B2P neural ne t w ork;algorith m i mp r ove m ent;stand2a l one app licati ons382。
基于卫星云图的云分类研究

基于卫星云图的云分类研究刘扬;王彬;韩雷【摘要】Radiation features and the distribution of kinds of clouds have significant influences on atmospheric radiation balance and climate. Therefore, how to classify clouds in satellite images is an important application as well as study focus in remote sensing field. The article introduces not only some methods of feature selection and extraction, but also unsupervised,supervised and neural network classifiers, which always used in cloud classification studies. Then it reviews studies of cloud classification over the past decades. Evaluation methods are discussed briefly with classification results in some studies.%各种类型云的辐射特性以及分布情况,对大气收支平衡以及天气气候都有重大影响,对云进行正确分类是遥感领域的重要应用和研究热点.文章基于对卫星云图进行自动准确识别和分类研究的前提,通过介绍几种特征提取和选择方法,以及介绍无监督、有监督和神经网络3类云分类研究常用分类方法,对国内外近几十年来所做的卫星云图分类研究进行综述介绍.并简要介绍了云分类结果的评价方法,对分类研究的结果进行定性讨论.【期刊名称】《电子设计工程》【年(卷),期】2011(019)010【总页数】4页(P189-192)【关键词】云分类;特征提取和选择;模式识别;神经网络【作者】刘扬;王彬;韩雷【作者单位】中国海洋大学,信息科学与工程学院,山东,青岛,266100;国家气象信息中心计算机室,北京,100081;中国海洋大学,信息科学与工程学院,山东,青岛,266100【正文语种】中文【中图分类】TP751.1各种类型云的辐射特性以及其分布情况,很大程度上影响着天气预报的准确性、气候监测的有效性和全球气候变化等。
云平台下的人工智能技术研究与应用

云平台下的人工智能技术研究与应用近年来,云计算技术的快速发展给人工智能技术的研究与应用带来了无限可能。
云平台下的人工智能技术已经成为了研究和开发的热点。
本文将从基本概念、技术优势和应用场景三个方面来探讨云平台下的人工智能技术。
一、基本概念在云平台下,人工智能技术主要包括人工智能算法、人工神经网络和深度学习等。
其中,深度学习技术是目前最热门的人工智能技术之一,它是对神经网络的拓展,通过层次化的特征学习来实现更加准确的识别和分类等任务。
实现人工智能技术需要大量数据和计算资源,而传统的服务器往往无法满足这些需求。
因此,基于云平台的人工智能技术成为了发展的趋势。
云平台可以提供强大的计算和存储能力,同时也可以提供高效的开发环境和数据管理系统,大大降低了人工智能技术的应用门槛。
二、技术优势云平台下的人工智能技术相比于传统的本地计算机有以下几个优势:1. 强大的计算能力:云平台可以提供几乎无限的计算资源,可以满足人工智能算法的需求。
同时,云平台还可以根据任务的不同,为不同的算法提供适合的计算资源。
2. 高效的数据管理:云平台可以提供适合人工智能算法的数据管理系统,包括数据清洗、数据存储和数据传输等。
这样可以使数据的准确性和规范性得到保障,并且可以方便地进行数据共享和协同工作。
3. 灵活的开发环境:云平台可以提供适合人工智能算法的开发环境和工具,例如深度学习框架和算法库等。
这使得开发者可以更加轻松地开发和部署人工智能应用,也可以更加专注于算法的设计和优化。
4. 高效的部署和管理:云平台可以提供高效的部署和管理方案,使得人工智能应用的运行更加稳定和可靠。
同时,云平台还可以为人工智能应用提供高效的安全保障和容灾能力。
三、应用场景云平台下的人工智能技术已经广泛应用于各个领域,包括医疗、金融、交通、智能制造等。
在医疗领域,云平台下的人工智能技术可以帮助医生进行疾病预测、诊断和治疗方案的定制,提高诊断的准确性和治疗的效果。
人工智能基础概念题库含参考答案
人工智能基础概念题库含参考答案一、单选题(共60题,每题1分,共60分)1、在自动定理证明研究方面在国际上有影响的我国知名科学家是:A、吴文俊B、宋健C、华罗庚D、钱学森正确答案:A2、无法适应业务发展要求或应当废止的数据资产标准,应及时()。
A、停用B、变更C、新增D、停用和退出正确答案:D3、进入21世纪以来,随着数据的爆发式增长,计算能力的大幅度提升和深度学习的发展和成熟,人工智能迎来了()发展浪潮A、第三次B、第二次C、第一次D、第四次正确答案:A4、按标注活动的自动化程度,以下()不属于数据标注的类别。
A、手工标注B、自动化标注C、半手工标注D、半自动化标注正确答案:C5、下列极大似然估计描述错误的是A、极大似然估计先假定其具有某种确定的概率分布形式B、概率模型的训练过程就是参数估计C、极大似然估计没有确定的概率分布形式D、贝叶斯学派认为参数本身也有分布,是未观察的随机变量正确答案:C6、随着()在计算机视觉、语音识别以及自然语言处理领域取得的成功,近几年来,无论是在消费者端还是在企业端,已经有许多依赖人工智能技术的应用臻于成熟,并开始渗透到我们生活的方方面面A、强化学习B、深度学习C、无监督学习D、监督学习正确答案:B7、下列说法中对专用人工智能理解正确的是()。
A、充分利用已掌握的技能来解决新问题、达到甚至超过人类智慧的人工智能。
B、是众多科幻作品中颠覆人类社会的人工智能形象。
C、在某一个特定领域应用的人工智能。
D、不是真正在这次人工智能浪潮中起到影响的主角。
正确答案:C8、根据(),目前的集成学习方法大致可分为两大类,即个体学习器间存在强依赖关系、必须串行生成的序列化方法,以及个体学习器间不存在强依赖关系、可同时生成的并行化方法。
A、个体学习器的生成方式B、个体学习器的的强弱C、个体学习器的的类型D、个体学习器的数量正确答案:A9、机器人能与人对话,主要是用了人工智能中的()A、语音识别B、自然语言处理C、多媒体技术D、机器翻译正确答案:A10、以下CNN网络模型中,最早用于手写数字识别的是()A、LeNet-5B、ResNet152C、AlexNetD、ResNet50正确答案:A11、从加工程度看,以下()属于数据产品中的应用类产品。
DST-Pointnet++:基于Pointnet++改进的点云分类网络

DST-Pointnet++:基于Pointnet++改进的点云分类网络王子璇;任明武
【期刊名称】《计算机与数字工程》
【年(卷),期】2022(50)11
【摘要】点云提供了精确的空间位置信息而被广泛应用于环境感知领域。
近年来,越来越多的工作尝试直接以点云作为输入进行特征提取,Pointnet[10]和
Pointnet++[11]是这个方向的开创者,但Pointnet++没有考虑点云非均匀采样的
问题。
研究提出了DST-Pointnet++对其进行改进,通过核密度估计和非线性变换
从点云中提取出逆密度因子,将其与原点云特征进行加权,得到了具有密度信息的点
云特征,提高了边缘点对局部特征的贡献,改善了因点云分布不均造成的问题。
经过
在公开数据集上测试对比,结果表明DST-Pointnet++具有更好的准确率和鲁棒性。
【总页数】5页(P2497-2501)
【作者】王子璇;任明武
【作者单位】南京理工大学计算机科学与工程学院
【正文语种】中文
【中图分类】P413
【相关文献】
1.基于PointNet++的室外场景三维点云多目标检测方法
2.基于改进ID3决策树
和神经网络的机载LiDAR点云分类3.基于PointNet++改进的点云特征提取与分
类网络架构4.一种基于改进PointNet++网络的三维手姿估计方法5.基于改进PointNet++的电力杆塔绝缘子分割方法
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
位 置 的低 云 、 中云和 薄 卷 云 在各 特 征 量 中 的重 叠最 严 重 。这种 信 息冲 突是 给云分 类神 经 网络带 来误 差 云 图像元 分 为晴 空 、 云 、 低 中云 、 薄卷 云 、 卷云 厚
析发 现 , 套 模 型 的分 类 结果 比传 统 模 型 的 分 类 结 果 更 合 理 , 别 是 在 中 低 云 和 薄 卷 云 的 云 量 和 位 置 分 辨 能 力 上 嵌 特
有 了较 大 提 高 。 关键 词 : 分 类 ;F 一C气 象 卫 星 ; P人 工神 经 网 络 云 Y2 B
气科 学研 究 以及其 他 学科 中 , 比如气 候 预测 、 台风 预
报、 降水估 计 、 医学 分 类 等 _ 。9 2 0年代 初 , 分 类 云
开始 采用 神经 网络 方法 , 整 网络类 型 、 调 网络 结 构 、 激 励 函数 、 样本 形 式和 特征 量 , 神经 网络 方法 在云 分
以也 无法 直接 用 于云分 类 中。
表 3 云 分 类 特 征 量 表
Ta e 3 Th ee td f a u e f bl e s lce e t r so
t l u ls iia i n he c o d c a s f c t o
云 分类 特 征
I R1亮 温
类 中取得 了不 错 的结果 l 。国家 卫星 气 象 中心也 _ 】
有 对 外发 布 的业务 云分 类 产 品I 该 产 品先 采 用 方 2 ,
2 1 91 0 10 —7收 到 , 0 20 6收到 再 改稿 。 2 1 -20 资助项 目: 国家 自然 科 学 基 金 项 目 (0 7 0 9 4 9 1 6 3 1 4 8 5 3 ,0 2 1 0 8 )
和 强对 流云 6类 。这 6类 云包含 了地 面 观测 中 的主
的最 大来源 , 文 的 目的就 是要 将 这 种 误 差 影 响 降 本
到最 低 。另外 , 厚卷 云和 强 对 流 云 的特 征 量 也 明显 低 于 其他几 类 , 由于 强对 流云 中 的极端低 温 较多 , 水 汽 的向上 输送更 强烈 , 因此从 I 1和 W V 亮温 图可 R 以发 现 , 对流 云 的特征 量呈偏 态 分布 。总 的来 说 , 强 每个 特征 量 的云 类 在 边 缘 都 会 出 现 一 定 的 重 叠 现 象 , 是 大气 中云 的复杂 性决 定 的 。 这
第2 3卷 第 3 期 21 0 2年 6月
应 用 气 象 学 报
J OURNAL OF APP ED ETE LI M OROL OGI CAL S ENCE CI
Vo. 1 23, N o .3
J n 0 2 u e2 1
张 振 华 , 春 生 , 智 华 , .一 种 人 工 神 经 网络 云 分类 方 法 的 改 进 与 应 用 .应 用 气 象 学 报 ,0 2 2 ( ) 3 533 苗 曾 是 在 分 类 问 题 中 已 被 广 泛 应 特 用 ’] 。 。由于神 经 网络对 所输 入 的特 征量 没有 严格 船 的规 则 , 虽然 能 得到较 好 的结 果 , 但是训 练 样本 中存 在 的冲 突 和 矛 盾 会 导 致 网络 的 准 确 性 下 降 。金 龙 等[ 2 0 年 通过 主成 分 分析 法 ( C 改 善 了模 型 = 04 2 幻 P A)
F 一C气 象 卫 星 携 带 有 可 见 光 和 红 外 自旋 扫 Y2 描 辐射 计 ( S R) 表 1列 出 了 VIS 各 通 道 参 VI S , SR 数 , 间分辨 率 为每小 时 获得 1次数 据 。 时
表 1 V S R通 道 特 征 IS
Ta e 1 Sp cfc to fVI S c n l bl e i a inso S R ha nes i
的过 拟合 问题 , 善 贤等 ] 0 4 通过 逐 步 回归方 俞 20 年
法 找 出 主要影 响 因子 输 入 到神 经 网络 中 , 降低 网 来 络 的冗 余 度 , 类 方法 都 取 得 了一 定 的效 果 。本 文 这 旨在 对 F 一 C气 象 卫 星 资 料 运 用 改 进 的 嵌 套 B Y2 P ( a kp o a ain 人 工 神 经 网络 模 型 得 到 云 分 类 b c rp g t ) o 产 品 , 除个 别通 道 中的 噪音 , 剔 提高 云分类 产 品 的分 析 精 度 , 且 通过 不 同个例 试验 , 体分 析新 的云分 并 具 类 方 法对 传统 B P人 工神 经 网络方 法 的改进 。
一
种 人 工 神 经 网 络 云 分 类 方 法 的 改 进 与 应 用
张振 华 u 苗春 生 曾智 华 师春 香 。
”( 南京 信息工程大学大气科学 系 , 南京 2 0 4 ) 1 0 4
( 国气 象 局 上 海 台风 研 究 所 , 海 2 0 3 ) 。( 家 气 象 信 息 中心 , 京 1 0 8 ) 中 上 0 00 国 北 0 0 1
和水 汽 ( wV) 3个通 道 的亮温 值 。
表 2 云 分 类 和 样 本 信 息
Ta e 2 Th n o m a i f c a s s a a pl s bl eifr ton o l s e nd s m e
从 图 1看 出每类 云 的概率分 布基 本符 合 正态分 布 。7 云分类 的 特征量 分 布从 高 到低 分 别 为 晴空 种 海 洋 、 空 陆地 、 云 、 晴 低 中云 、 卷 云 、 卷 云和 强对 薄 厚
差 和平 均值 的抛 物线 拟合 方程 区分 出高云 及 晴空混
引 言
卫 星资 料 已经是 大气 科学 研究 中不 可 或缺 的资
合像 元 和 中低 云 像元 , 通 过 直 方 图分 析 出各 云 类 再 的 阈值 , 最后 用 欧几 里 得 距 离 和 斜 率 两 个标 准进 行
聚类 , 到 6类 云 以及 晴 空 。 得 研究 已经证 明 了人工 神经 网络对 非线 性关 系 的
的 中分辨 率 红外 辐 射 计 ( du ReouinI fa Me im slt n r— o rdR do tr 资料 进 行 热 带 海 洋 云分 类 。2 e a imee) O世 纪8 O年 代末 , 随着 人 工神经 网络方 法 的发展 及其 在
分 类 和预 测 问题上 的 突 出表 现 , 被 渐 渐 引 入 到 大 也
摘
要
采用 20-20 0 5 0 9年 F 一C静 止 气 象 卫 星可 见 光 和 红 外 自旋 扫 描 辐 射 计 的 红 外 1 I 1 、 外 2 I 2 和 水 汽 Y2 (R ) 红 (R ) ( V 亮温资料 , 取 24 w ) 选 4 9个 云 分 类 样 本 。设 计 两 层 嵌 套 的 前 向传 递 后 向 反 馈 ( P 人 工 神 经 网 络 模 型 , 1 网 B ) 第 层 络 选 取 I 1 I , V 亮 温 及 I 1与 wV 亮 温 差 和 I 2与 w V 亮 温 差 5 特征 量 , 2层 网络 选 取 特 征 量 I 与 R , R2 w R R 个 第 R1 I 亮 温 差 , 层 网络 都 采 用 一 层 隐 含 层 且 带 有 附加 动 量 法 的 简 单 网络 , 低 了 网 络 的冗 余 度 。误 差 分 析 表 明 : R2 两 降 嵌 套B P人 工 神 经 网络 模 型 的 分 类 准 确 率 在 中云 和 薄 卷 云 这 两 类 上 分 别 提 高 了 4 . 和 1 . , 个 分 类 模 型 的 平 27 13 整 均 平 方误 差 和 标 准 化 平 均 平 方 误 差 分 别 降低 了 6 1 和 4 . , 关 系 数 提 高 了 3 4 。 通 过 3 个 例 的 对 比 分 . 47 相 . 个
I R1与 I R2亮 温 差 I 与 W V亮 温 差 R1 I 2与 W V亮 温差 R
红外 1和红 外 2通 道 的 分 裂 窗 差
红 外 1和 水 汽 通 道 的亮 温 差 红 外 2和 水 汽 通 道 的亮 温 差
本 包 含 了所 采 集 像 元 的红 外 1 I ) 红 外 2 I 2 (R1 、 (R )
* E ma : ub e 9 5 g i c r - i g il1 8 @ ma . o l l n
36 5
应
用
气
象
学
报
第 2 卷 3
1 2 样 本 特 征 .
1 资 料 与 检 验 方 法
11 资 . 料
本 文 收集 了 由红 外和 水汽 通道亮 温 线性组 合 得 到的 6个特 征 量 ,R1 I I ,R2和 wV 分 别 为 3个通 道 的亮 温 ,R I 1与 I 2亮 温 差 ,R1与 WV 亮 温 差 和 R I I R2与 WV 亮 温差 , 如表 3所示 。需 要指 出 , 可见 光
料 , 星云 图作 为卫 星资料 中尤 其 重要 的一 部分 , 卫 也
已经被 广泛 应用 , 云分 类 产 品则 是卫 星 云 图 中非 常 重要 的产 品之 一 。S e k等 口 1 7 hn ] 9 6年 基 于 辐 射 传
输 理论 , 用 多 通 道 阈 值 方 法 对 Ni u一 运 mb s3卫 星 上
通道 虽然 对低 云有 很 好 的 识别 能 力 , 是 在 夜 间 无 但
法获 得可 用 的资 料 , 以不 能 在 连 续 时 间上 应 用 。 所 而 中红外 通道 I 4在 夜 间 遥感 红外 辐 射 , R 白天 不 仅
遥感 红外 辐射 而且 会 受 到 反 射 的太 阳光 的影 响 , 所