DASEN-3i_连接手册
ICP DAS WinCon8000 Series 硬件用户手册说明书

• WinCon 8000 Series
The WinCon 8000 is the flagship compact embedded controller manufactured by ICP DAS. Its leading technology gives you all of the best features of both traditional PLCs and Windows capable PCs. The WinCon 8000 system is powered by Windows and brings Windows programming style and skill into the world of PC-based PLCs. Application developers can directly develop their own programs in Microsoft’s Visual Studio .NET and Embedded Visual tools with the WinCon SDK, and then download them into WinCon 8000 for use. Or, they can port their favorite SCADA software onto WinCon 8000 for even easier application development. For SCADA applications, we also provide a product model embedded with InduSoft Web Studio run-time version to meet this need.
ICP DAS DL-100TM485 用户手册说明书
and the parity, data bits and stop bits are fixed as no
parity, 8 data bits and 1 stop bit. The following Modbus
functions are supported.
1/4 1/3 3.0 V 64 Hz
Power reverse polarity protection +10 ~ +30 VDC ≤ 0.15 W @ 24 VDC
86 mm x 128 mm x 52 mm
-20 ~ +60℃ -30 ~+80℃ 5 ~ 95% RH, Non-condensing
ΔT (±℃)
3 2.5
2 1.5
1 0.5
0 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80 90 100 Temperature (℃)
Figure 2: Maximum T-tolerance per sensor.
DL-100TM485 User Manual, V1.01
1 Hardware Information....................................................................................4 1.1 Specifications...........................................................................................4 1.2 Function Block ........................................................................................6 1.3 Pin Assignments ......................................................................................6 1.4 Wire Connections ....................................................................................7 2 Modbus RTU Protocol ................................................................................8 2.1 Modbus Mapping Table .............................................................................9 3 Utility Software............................................................................................13 3.1 Before you use the Utility Software.........................................................13 3.2 DL-100TM485 Utility .............................................................................14 3.3 Configuration ...........................................................................................15 4 Appendix......................................................................................................16 4.1 LCD Information: ....................................................................................16
DAAS3L操作手册
DAAS3L操作手册音频测试系统操作手册Copyright2022一、主菜单功能:(图1)1图1F1:频率响应测试F2:阻抗特性测试F3:扬声器低频参数测试F4:失真测试F5:RT60测试F6:声压及电平测试F7:音频示波器F8:扫频仪F9:信号发生器F10:系统设定一.频率响应曲线测试步骤:1〉点击主菜单中的F1Freq.Rep出现图2菜单:〔图2〕2图2F1测试扬声器频响曲线F2测试放大器F3测试麦克风F4声一声对比2〉选择F1electrical─acoutical.(loud.peaker)测试扬声器频响曲线:出现图3界面3〉图3中:F10.2V,F22V,F320V均为系统测试量程。
大信号测试,如测频响时选择F320V,小信号测试,如测试阻抗时选择F10.2V。
F4UeLat:使用先前的测试结果。
如先前做过这一步骤并且现在想跳过这一步,可选择F4UelatF5Load为调出一个预存的测试数据。
F9Out.Att.为调整信号输出的大小。
F10Sample.rate.设定取样频率及测量范围:(见图4)F164KHZ:测试范围27HZ—26667HZF248KHZ:测试范围20HZ—20000HZF36KHZ:测试范围3HZ—2500HZ注:在本系统中,相同标示的按键有着相同的功能,并不一定要一一讲述3图3图43>选择按F320V测量放大器输出电压,(如图3)4〉选按F320V后出现图5界面(图5)4图5在图5中:按F1OK继续执行测试图65图7图8按F2Repeat重做该测试步骤按F4Print打印该幅图形按F5Save存储图形5〉选按F1OK则继续下一步测试6〉选择F28Pa(图6)7〉选择F1OK(图7)即可得到扬声器频响曲线(图8)68〉在显示频响曲线界面中(图8)F1Repeat:重做上一步骤F2Freetield:自由音场校正F3Phae:相位特性F4Print:打印图形F5Load/ave:调出存储的图形F6Waterfall:显示瀑布图F7Steprep:阶梯响应计算F8Diplrange:调整图形座标及分辨率F9QuickRepeat:快速重测键F10Function:其它功能设定图99〉图8中其它功能说明1)点击F2Freefield自由音场校正,得到如图9界面F1OK:返回上一面界面F2、F3、F7、F8:调整座标F4、F5、F9、F10:水平垂直方向缩放F6:显示ETC结果2)点击F3Phae得到红色相位特性图(如图10)在相位菜单内:7图10F1OK:回到上一界面F3minimalphae:最小相位换算F4Print:图形打印F5E某port:输出CAD数据F6F7:缩放座标F9:Delay:延迟特性83)点击F6waterfall得到瀑布图(图11)F1OK返回上一界面4)点击F8DipLrange调整纵横向座标及分辨率(图12)图12F1Setupfrequeneya某i调整水平显示范围F2Setupmagnitudea某i 调整整纵向分辨率5)点击F10Function,进入其它功能设定(图13)F1E某portcurve:储存当前测试曲线F2Correctditanceloudpeaker—mic:手动修正扬声器与麦克风之距离F3Makload/ave/import/new:品管功能键见操作手册之品管功能说明F4Smoofh:平滑键提示:1)在测完频响曲线后,按住鼠标右键并拖动,可显示曲线上任何一点的测试值2)曲线可利用光标键上下移动。
WSEN-ISDS应用指南:使用单I2C总线连接多个传感器说明书

ANM005-U SING MULTIPLE SENSORS ONSINGLE I2C B USV ERSION1.1F EBRUARY7,2023Revision historyContents1Introduction3 2How to implement multiple sensors with same I2C Address?42.1Multiplexers (4)2.2De-selecting not required sensors through GPIO pins of microcontroller..5 3Important notes73.1General customer responsibility (7)3.2Customer responsibility related to specific,in particular safety-relevant ap-plications (7)3.3Best care and attention (7)3.4Customer support for product specifications (7)3.5Product improvements (8)3.6Product life cycle (8)3.7Property rights (8)3.8General terms and conditions (8)4Legal notice94.1Exclusion of liability (9)4.2Suitability in customer applications (9)4.3Usage restriction (9)5License terms for Würth Elektronik eiSos GmbH&Co.KG sensor product software and source code115.1Limited license (11)5.2Usage and obligations (11)5.3Ownership (12)5.4Disclaimer of warranty (12)5.5Limitation of liability (12)5.6Applicable law and jurisdiction (12)5.7Severability clause (13)5.8Miscellaneous (13)Two of each WSEN-P ADS,WSEN-TIDS,WSEN-ISDS and WSEN-ITDS could be connected to the same I 2C bus since,two I 2C slave addresses (based on the SAO pin connection)are available for these sensors.Only one of each WSEN-HIDS and WSEN-PDUS could be connected to a single I 2C bus since only one I 2C slave address is available.Figure 1:T wo WSEN-PADS with separate slave address on an I 2C busHowever,some applications require the use of same sensors multiple times on a single I 2C bus.For example,to have more than two pressure sensors on a single I 2C bus.In these cases,the maximum number of devices that could be connected to the I 2C bus depends on the available slave addresses of that particular device.I 2C with the same I 2Ca multiplexer.The selects whichever be resolved and WSEN-HIDSWSEN-HIDS WSEN-HIDS WSEN-HIDSSensor SCL Sensor SDAFigure 2:Multiple sensors with one I 2C address connected through multiplexer For example TCA9548A from T exas Instruments is an 8-Channel I 2C multiplexer and can support up to 8-devices.The Multiplexer has 8bidirectional translating switches that can be controlled through the I 2C bus from the master.Each channel consists of a pair of data and clock line and any individual channel or combination of channels can be selected through the programmable registers.Figure3:Application diagram of Multiplexer TCA9548A2.2De-selecting not required sensors through GPIO pins ofmicrocontrollerUsing microcontroller GPIO pins,each sensor can be taken into operation(GPIO Pin logic HIGH)one by one,and keeping rest of the sensors de-selected(GPIO logic LOW).Hence, at a time,only one sensor is in working state.This set-up requires use of multiple GPIO pins on the microcontroller side.For example,WSEN-TIDS SAO pin can be connected to the GPIO pins of microcontroller. By switching the SAO pins of each sensor high one by one,each TIDS sensor can be addressed through one I2C address(SAO=High=0x38).Rest of the TIDS sensors have their SAO pins at logic LOW with I2C address0x3F and hence they are de-selected. Number of sensors that can be attached to the microcontroller in this way also depends upon the number of available GPIO pins.This is possible only for the sensors with two I2C address.(WSEN-ITDS,WSEN-ISDS,WSEN-PADS and WSEN-TIDS.Figure 4:Sensor-1in operation with I 2C address 0x38because GPIO-1is highFigure 5:Sensor-2in operation with I 2C address 0x38because GPIO-2is high3Important notesThe following conditions apply to all goods within the sensors product range of Würth Elek-tronik eiSos GmbH&Co.KG:3.1General customer responsibilitySome goods within the product range of Würth Elektronik eiSos GmbH&Co.KG contain statements regarding general suitability for certain application areas.These statements about suitability are based on our knowledge and experience of typical requirements con-cerning the areas,serve as general guidance and cannot be estimated as binding statements about the suitability for a customer application.The responsibility for the applicability and use in a particular customer design is always solely within the authority of the customer.Due to this fact,it is up to the customer to evaluate,where appropriate to investigate and to decide whether the device with the specific product characteristics described in the product speci-fication is valid and suitable for the respective customer application or not.Accordingly,the customer is cautioned to verify that the documentation is current before placing orders. 3.2Customer responsibility related to specific,in particularsafety-relevant applicationsIt has to be clearly pointed out that the possibility of a malfunction of electronic components or failure before the end of the usual lifetime cannot be completely eliminated in the current state of the art,even if the products are operated within the range of the specifications. The same statement is valid for all software and software parts contained in or used with or for products in the sensor product range of Würth Elektronik eiSos GmbH&Co.KG. In certain customer applications requiring a high level of safety and especially in customer applications in which the malfunction or failure of an electronic component could endanger human life or health,it must be ensured by most advanced technological aid of suitable design of the customer application that no injury or damage is caused to third parties in the event of malfunction or failure of an electronic component.3.3Best care and attentionAny product-specific data sheets,manuals,application notes,PCN’s,warnings and cau-tions must be strictly observed in the most recent versions and matching to the products revisions.This documents can be downloaded from the product specific sections on the wireless connectivity and sensors homepage.3.4Customer support for product specificationsSome products within the product range may contain substances,which are subject to re-strictions in certain jurisdictions in order to serve specific technical requirements.Necessary information is available on request.In this case,thefield sales engineer or the internal sales person in charge should be contacted who will be happy to support in this matter.3.5Product improvementsDue to constant product improvement,product specifications may change from time to time. As a standard reporting procedure of the Product Change Notification(PCN)according to the JEDEC-Standard,we inform about major changes.In case of further queries regarding the PCN,thefield sales engineer,the internal sales person or the technical support team in charge should be contacted.The basic responsibility of the customer as per section3.1 and3.2remains unaffected.The sensor driver software¨Sensor SDK¨and it’s source codes are not subject to the Prod-uct Change Notification information process.3.6Product life cycleDue to technical progress and economical evaluation we also reserve the right to discon-tinue production and delivery of products.As a standard reporting procedure of the Product Termination Notification(PTN)according to the JEDEC-Standard we will inform at an early stage about inevitable product discontinuance.According to this,we cannot ensure that all products within our product range will always be available.Therefore,it needs to be verified with thefield sales engineer or the internal sales person in charge about the current product availability expectancy before or when the product for application design-in disposal is con-sidered.The approach named above does not apply in the case of individual agreements deviating from the foregoing for customer-specific products.3.7Property rightsAll the rights for contractual products produced by Würth Elektronik eiSos GmbH&Co.KG on the basis of ideas,development contracts as well as models or templates that are subject to copyright,patent or commercial protection supplied to the customer will remain with Würth Elektronik eiSos GmbH&Co.KG.Würth Elektronik eiSos GmbH&Co.KG does not warrant or represent that any license,either expressed or implied,is granted under any patent right, copyright,mask work right,or other intellectual property right relating to any combination, application,or process in which Würth Elektronik eiSos GmbH&Co.KG components or services are used.3.8General terms and conditionsUnless otherwise agreed in individual contracts,all orders are subject to the current ver-sion of the"General Terms and Conditions of Würth Elektronik eiSos Group",last version available at .4Legal notice4.1Exclusion of liabilityWürth Elektronik eiSos GmbH&Co.KG considers the information in this document to be correct at the time of publication.However,Würth Elektronik eiSos GmbH&Co.KG re-serves the right to modify the information such as technical specifications or functions of its products or discontinue the production of these products or the support of one of these products without any written announcement or notification to customers.The customer must make sure that the information used corresponds to the latest published information.Würth Elektronik eiSos GmbH&Co.KG does not assume any liability for the use of its products. Würth Elektronik eiSos GmbH&Co.KG does not grant licenses for its patent rights or for any other of its intellectual property rights or third-party rights.Notwithstanding anything above,Würth Elektronik eiSos GmbH&Co.KG makes no repre-sentations and/or warranties of any kind for the provided information related to their accuracy, correctness,completeness,usage of the products and/or usability for customer applications. Information published by Würth Elektronik eiSos GmbH&Co.KG regarding third-party prod-ucts or services does not constitute a license to use such products or services or a warranty or endorsement thereof.4.2Suitability in customer applicationsThe customer bears the responsibility for compliance of systems or units,in which Würth Elektronik eiSos GmbH&Co.KG products are integrated,with applicable legal regulations. Customer acknowledges and agrees that it is solely responsible for compliance with all le-gal,regulatory and safety-related requirements concerning its products,and any use of Würth Elektronik eiSos GmbH&Co.KG components in its applications,notwithstanding any applications-related in-formation or support that may be provided by Würth Elektronik eiSos GmbH&Co.KG.Customer represents and agrees that it has all the necessary expertise to create and implement safeguards which anticipate dangerous consequences of failures, monitor failures and their consequences lessen the likelihood of failures that might cause harm and take appropriate remedial actions.The customer will fully indemnify Würth Elek-tronik eiSos GmbH&Co.KG and its representatives against any damages arising out of the use of any Würth Elektronik eiSos GmbH&Co.KG components in safety-critical applica-tions.4.3Usage restrictionWürth Elektronik eiSos GmbH&Co.KG products have been designed and developed for usage in general electronic equipment only.This product is not authorized for use in equip-ment where a higher safety standard and reliability standard is especially required or where a failure of the product is reasonably expected to cause severe personal injury or death, unless the parties have executed an agreement specifically governing such use.Moreover, Würth Elektronik eiSos GmbH&Co.KG products are neither designed nor intended for use in areas such as military,aerospace,aviation,nuclear control,submarine,transportation (automotive control,train control,ship control),transportation signal,disaster prevention, medical,public information network etc.Würth Elektronik eiSos GmbH&Co.KG must be informed about the intent of such usage before the design-in stage.In addition,sufficient reliability evaluation checks for safety must be performed on every electronic component,which is used in electrical circuits that require high safety and reliability function or perfor-mance.By using Würth Elektronik eiSos GmbH&Co.KG products,the customer agrees tothese terms and conditions.5License terms for Würth Elektronik eiSosGmbH&Co.KG sensor product software and source codeThis License terms will take effect upon the purchase and usage of the Würth Elektronik eiSos GmbH&Co.KG sensor products.Y ou hereby agree that this license terms are appli-cable to the product and the incorporated software,firmware and source codes(collectively, "Software")made available by Würth Elektronik eiSos in any form,including but not limited to binary,executable or source code form.The software included in any Würth Elektronik eiSos sensor product is purchased to you on the condition that you accept the terms and conditions of this license terms.Y ou agree to comply with all provisions under this license terms.5.1Limited licenseWürth Elektronik eiSos hereby grants you a limited,non-exclusive,non-transferable and royalty-free license to use the software and under the conditions that will be set forth in this license terms.Y ou are free to use the provided software only in connection with one of the products from Würth Elektronik eiSos to the extent described in this license terms.Y ou are entitled to change or alter the source code for the sole purpose of creating an ap-plication embedding the Würth Elektronik eiSos sensor product.The transfer of the source code to third parties is allowed to the sole extent that the source code is used by such third parties in connection with our product or another hardware provided by Würth Elektronik eiSos under strict adherence of this license terms.Würth Elektronik eiSos will not assume any liability for the usage of the incorporated software and the source code.Y ou are not entitled to transfer the source code in any form to third parties without prior writ-ten consent of Würth Elektronik eiSos.Y ou are not allowed to reproduce,translate,reverse engineer,decompile,disassemble or create derivative works of the incorporated software and the source code in whole or in part. No more extensive rights to use and exploit the products are granted to you.5.2Usage and obligationsThe responsibility for the applicability and use of the Würth Elektronik eiSos sensor product with the incorporated software in a particular customer design is always solely within the authority of the customer.Due to this fact,it is up to you to evaluate and investigate,where appropriate,and to decide whether the device with the specific product characteristics de-scribed in the product specification is valid and suitable for your respective application or not.Y ou are responsible for using the Würth Elektronik eiSos sensor product with the incorpo-rated software in compliance with all applicable product liability and product safety laws.Y ou acknowledge to minimize the risk of loss and harm to individuals and bear the risk for failure leading to personal injury or death due to your usage of the product.Würth Elektronik eiSos’products are not authorized for use in safety-critical applications, or where a failure of the product is reasonably expected to cause severe personal injury or death.Moreover,Würth Elektronik eiSos’products are neither designed nor intended for use in areas such as military,aerospace,aviation,nuclear control,submarine,trans-portation(automotive control,train control,ship control),transportation signal,disaster pre-vention,medical,public information network etc.Y ou shall inform Würth Elektronik eiSos about the intent of such usage before design-in stage.In certain customer applications re-quiring a very high level of safety and in which the malfunction or failure of an electronic component could endanger human life or health,you must ensure to have all necessary ex-pertise in the safety and regulatory ramifications of your applications.Y ou acknowledge and agree that you are solely responsible for all legal,regulatory and safety-related requirements concerning your products and any use of Würth Elektronik eiSos’products in such safety-critical applications,notwithstanding any applications-related information or support that may be provided by Würth Elektronik eiSos.YOU SHALL INDEMNIFY WÜRTH ELEKTRONIK EISOS AGAINST ANY DAMAGES ARISING OUT OF THE USE OF WÜRTH ELEKTRONIK EISOS’PRODUCTS IN SUCH SAFETY-CRITICAL APPLICA TIONS.5.3OwnershipThe incorporated Software created by Würth Elektronik eiSos is and will remain the exclusive property of Würth Elektronik eiSos.5.4Disclaimer of warrantyTHE SOFTWARE AND IT’S SOURCE CODE IS PROVIDED"AS IS".YOU ACKNOWL-EDGE THA T WÜRTH ELEKTRONIK EISOS MAKES NO REPRESENTATIONS AND WAR-RANTIES OF ANY KIND RELATED TO,BUT NOT LIMITED TO THE NON-INFRINGEMENT OF THIRD P ARTIES’INTELLECTUAL PROPERTY RIGHTS OR THE MERCHANTABIL-ITY OR FITNESS FOR YOUR INTENDED PURPOSE OR USAGE.WÜRTH ELEKTRONIK EISOS DOES NOT WARRANT OR REPRESENT THAT ANY LICENSE,EITHER EXPRESS OR IMPLIED,IS GRANTED UNDER ANY PATENT RIGHT,COPYRIGHT,MASK WORK RIGHT,OR OTHER INTELLECTUAL PROPERTY RIGHT RELATING TO ANY COMBINA-TION,MACHINE,OR PROCESS IN WHICH THE WÜRTH ELEKTRONIK EISOS’PROD-UCT WITH THE INCORPORATED SOFTWARE IS RMA TION PUBLISHED BY WÜRTH ELEKTRONIK EISOS REGARDING THIRD-PARTY PRODUCTS OR SERVICES DOES NOT CONSTITUTE A LICENSE FROM WÜRTH ELEKTRONIK EISOS TO USE SUCH PRODUCTS OR SERVICES OR A WARRANTY OR ENDORSEMENT THEREOF.5.5Limitation of liabilityAny liability not expressly provided by Würth Elektronik eiSos shall be disclaimed.Y ou agree to hold us harmless from any third-party claims related to your usage of the Würth Elektronik eiSos’products with the incorporated software and source code.Würth Elektronik eiSos disclaims any liability for any alteration,development created by you or your customers as well as for any combination with other products.5.6Applicable law and jurisdictionApplicable law to this license terms shall be the laws of the Federal Republic of Germany. Any dispute,claim or controversy arising out of or relating to this license terms shall be resolved andfinally settled by the court competent for the location of Würth Elektronik eiSos registered office.5.7Severability clauseIf a provision of this license terms are or becomes invalid,unenforceable or null and void, this shall not affect the remaining provisions of the terms.The parties shall replace any such provisions with new valid provisions that most closely approximate the purpose of the terms.5.8MiscellaneousWürth Elektronik eiSos reserves the right at any time to change this terms at its own discre-tion.It is your responsibility to check at Würth Elektronik eiSos homepage for any updates. Y our continued usage of the products will be deemed as the acceptance of the change. We recommend you to be updated about the status of new software,which is available on our website or in our data sheet,and to implement new software in your device where ap-propriate.By ordering a sensor product,you accept this license terms in all terms.List of Figures1T wo WSEN-PADS with separate slave address on an I2C bus (3)2Multiple sensors with one I2C address connected through multiplexer (4)3Application diagram of Multiplexer TCA9548A (5)4Sensor-1in operation with I2C address0x38because GPIO-1is high (6)5Sensor-2in operation with I2C address0x38because GPIO-2is high (6)References[1]International Organization for Standardization;Standard Atmosphere;1975;ISO2533:1975.[2]Manual of the ICAO Standard Atmosphere(extended to80kilometres)(3rd edi-tion);International Civil Aviation Organization;1993;ISBN978-92-9194-004-2.Doc7488-CD.Monitoring & Control Automated Meter ReadingInternet of Things。
仪器复用用户手册说明书

四 注意事项 .................................................................................................................................... 19
五 故障排查 .................................................................................................................................... 20
硬件配置:对数据服务器硬件配置:CPU 双核 1.8GGHz 以 上、内存 4GB 以上、硬盘 500GB 以上;
软件配置:对测试数据服务器端操作系统可选用 Windows
以上操作系统,适用安装 和 sever 2008 R2
SQL 5.6 Idea-A-
系统服务。
2.1.2 用户管理端(设置端)配置
进入安装界面,点击
键进行安装;
进安入装安完装成过后程,;自动进入仪器复用软件置好Internet Explorer 浏览 器环境;
参数说明书(3i)

本使用说明中把安全注意事项的等级分为三个层次︰危险、报警和注意。
! 危险
不适当的操作会出现导致操作者死亡或重伤的危险。
3. 关于维修的注意事项 通电状态下请勿进行电池更换。 请勿对电池进行短路、充电、高温、焚烧及分解操作。 更换下来的电池请按照当地法规规定的方法进行处理。
4. 关于伺服参数、主轴参数的注意事项 参数的极端调整和更改会导致工作不稳定,请勿进行此操作。 关于位元的说明,包括空位在内,未使用的位元全部设定为“0”。
! 注意 ! 如果本说明书中关于“限制事项”和“允许条件”的说明与机床制造商的规格说明书中的说 明有冲突,则以后者为准。 ! 本说明书中未加说明的操作被认为是不可能进行的。
! 本说明书是设想您的机床具备 DASEN-3i 装置全部功能而拟订的。在进行操作之前,务必
请先参阅机床制造商提供的规格说明书,确认您的机床所具有的功能。 ! 根据 NC 系统的版本不同,画面/功能会有不同,会有某些功能不能使用。
关于阅读本说明书的注意事项
(1) 本说明书从 NC 角度阐述一般参数。 有关各工作机械的说明,请参阅机床制造商出版的说明书。如果有关“限制事项”和“允许 条件”,本说明书与机床制造商的说明书有矛盾时,则以机床制造商的说明书为准。
(2) 本说明书力求包括尽可能多的内容,包括特殊操作。本说明书中未加说明的操作被认为是不 可能进行的。
DASEN-3i
报警/参数说明书
请仔细阅读本手册,并作为后续参考
大森数控
前言
本说明书是使用 DASEN-3i 控制器时所需的报警/参数指南。 本说明书是设想您的机床具备 DASEN-3i 控制器全部功能而拟订的,但 NC 控制器中,不
大森数控 DASEN-9i 说明书

DASEN-9i操作手册编程手册请仔细阅读本手册,并作为后续参考目录Ⅰ编程操作第一部分 概述 (1)1.规格 (2)1.1基本功能 (2)1.2辅助功能 (6)1.3 主轴功能 (6)1.4 刀具功能 (6)1.5 编辑 (6)2.地址码一览表 (7)3.G码一览表 (7)4.辅助功能(M2位数) (9)4.1 自动方式 (9)4.2 手动方式 (9)5.CRT/MDI面板的说明 (10)6.机床操作面板的说明 (12)6.1方式选择 (12)第二部分手动加工 (17)1.概述 (17)2.机床的启动 (17)2.1 通电 (17)2.2 机械原点的设定 (18)3.电源关闭 (19)4.手动方式操作 (19)4.1 设定手动方式 (19)4.2 手动方式显示的坐标系切换 (19)4.3 手动方式坐标系的建立 (21)4.4 手动点动进给(JOG进给) (24)4.5 手轮进给 (25)4.6 主轴控制 (26)4.7 冷却控制 (26)第三部分编制程序 (27)1.概述 (27)2.程序结构 (27)2.1 程序段 (27)2.2 字(地址码) (28)2.3 输入方式 (28)2.4 小数点输入方式 (28)2.5 程序名称 (29)2.6 顺序号 (29)2.7 选择性程序跳步 (29)3.控制轴和坐标系 (29)3.1 控制轴 (29)3.2 坐标系 (30)3.3 进给功能 (31)4.准备功能(G指令) (34)4.1 位置定位(快速进给:G00) (34)4.2 直线插补(G01) (36)4.3 圆弧插补(G02,G03) (38)4.4 平面选择(G18) (42)4.5暂停(G04) (43)4.6精定位 (G09) (44)4.7英制指令/公制指令转换(G20,G21) (47)4.8参考点(原点)复归 (G28, G29) (47)4.9返回第2~4参考点(G30) (48)4.10螺纹切削(G32) (55)4.11 刀尖R补偿(G40,G41,G42) (57)4.12加工坐标系设定(G50) (65)4.13 本地坐标系(G52) (67)4.14机械坐标系选择(G53) (68)4.15选择加工坐标系(G54~G59) (69)4.16外径切削固定循环(G90) (71)4.17螺纹切削固定循环(G92) (72)4.18端面固定循环(G94) (74)4.19恒线速控制(G96,G97) (76)4.20每分进给 每转进给(G98,G99) (77)5.辅助功能(M指令) (79)5.1 程序停止(M00) (79)5.2 选择停止(M01) (79)5.3 程序结束(M02,M30) (79)5.4 子程序控制(M98,M99) (80)6.主轴功能(S码)、刀具功能(T码) (85)6.1 主轴功能 (85)6.2 刀具功能 (85)7.子程序 (86)7.1 子程序的编制 (86)7.2子程序执行 (86)8.综合编程实例 (87)第四部分MDI运行 (89)1.概述 (89)2.MDI操作 (89)2.1 MDI方式 (89)2.2 显示内容的选择 (89)2.3 模态数据显示 (92)2.4 坐标系设定 (93)2.5 点位控制 (94)2.6 直线插补 (95)2.7 圆弧插补 (96)2.8 固定循环 (97)2.9 子程序 (99)2.10 刀尖R补偿 (100)2.11 其他指令 (100)第五部分自动加工 (101)1.概述 (101)2.编辑 (101)2.1 概述 (101)2.2 编辑页面的说明 (102)3.程序的输入方法 (103)3.1 NC指令输入程序 (103)3.2 编辑键的使用方法 (104)3.3 编辑的注意事项 (105)3.4 编辑程序 (106)3.5程序的清除 (111)3.6 程序的更名 (112)3.7 程序的复制 (113)4.刀补的设定 (114)4.1 概述 (115)4.2 刀补设定 (116)4.3 刀补的清除 (121)4.4 刀补值输入 (121)4.5 刀补值输出 (121)5.自动方式操作方法 (122)5.1 急停 (122)5.2 复位 (122)5.3 循环启动 (122)5.4 进给保持 (123)5.5 单程序段 (123)5.6 选择停止 (123)5.7 空运行 (123)5.8 辅助功能锁住 (124)5.9 机床锁住 (124)5.10 选择程序段跳步 (124)5.11 进给倍率 (124)附录 (125)1.故障信息 (125)1.1 表示伺服轴的信息 (125)1.2 运行页面的出错信息 (126)1.3 其它出错信息 (127)1.4 通讯故障信息 (127)1.5编辑的出错信息 (128)1.6 参数设定出错信息 (128)2.通信格式 (129)2.1 通信代码 (129)2.2 可以使用的字符 (129)2.3 输出方法 (131)2.4 输入的方法 (132)Ⅱ系统参数1.进入参数画面 (134)2.浏览参数 (134)2.1 按功能查看参数 (134)2.2 按序号查看参数 (136)3.修改参数 (137)4.参数设定内容 (138)4.1基本设定相关 (138)4.2 计数器,原点相关 (139)4.3速度,加速度相关 (143)4.4伺服相关 (150)4.5手动进给相关 (156)4.6辅助功能,控制信号相关 (157)4.7程序(固定循环)相关 (165)4.8显示控制相关 (168)4.9反向间隙,反馈报警相关 (169)4.10区间误差补偿相关 (170)4.11行程限位相关 (174)4.12座标补偿值相关 (177)4.13编辑、通信相关 (180)Ⅰ编程操作i第一部分概述前言感谢您选用本系统。
ICP DAS CAN-2017C CANopen Slave Device 应用用户手册说明书

CANopen Slave DeviceCAN-2017CApplication User’s ManualWarrantyWithout contrived damage, all products manufactured by ICP DAS are warranted in one year from the date of delivery to customers.WarningICP DAS revises the manual at any time without notice. However, no responsibility is taken by ICP DAS unless infringement act imperils to patents of the third parties.CopyrightCopyright © 2011 is reserved by ICP DAS.TrademarkThe brand name ICP DAS as a trademark is registered, and can be used by other authorized companies.Contents1Introduction (3)1.1Overview (3)1.2Hardware Specifications (4)1.3Features (5)1.4Application (5)2Hardware (6)2.1Structure (6)2.2Node ID & Baud Rate Rotary Switch (7)2.3LED Description (8)2.4PIN Assignment (9)2.5Wire Connection (10)3Application (11)3.1Object Dictionary (11)3.2Store and Restore Object (17)3.3Application Object (18)3.4Default PDO Mapping (19)3.5EMCY Communication (20)Appendix A: Dimension (21)Appendix B: Type Code Definition (22)1 Introduction1.1 OverviewCANopen is one kind of the network protocols based on the CAN bus and mainly used for embedded network system, such as industrial machine control , vehicle control system, factory automation, medical equipments control, remote data acquisition, environmental monitoring, and packaging machines control, etc.The CAN-2017C module follows the CiA DS-301 version 4.02 and DSP-401 version 2.1. It is easy to access the differential analog input status and set the configuration by using the standard CANopen protocol. The CAN-2017C has passed the validation of the CiA CANopen Conformance Test tool. Therefore, the provided EDS file is standard for any other standard CANopen masters. By using the 8-channel analog input and the CANopen masters of ICP DAS, you can quickly build a CANopen network to approach your requirements.1.2 Hardware SpecificationsAnalog Input:●Input Channels: 8●Input Type: ±10V, ±5V,±1V, ±500mV, ±150mV, -20mA ~ +20mA(External 125ΩResistor is Required)●Resolution: 16-bit●Accuracy: ±0.1% FSR●Sampling Rate: 10 Samples/ sec (Total)●Zero Drift: ±10μV/ °C●Span Drift: ±25 ppm/ °C●Common Mode Rejection: 86 dB●Normal Mode Rejection: 100 dB●Input Impedance: >2 MΩ●Over-voltage Protection: 240 Vrms●Individual Channel Configuration: Yes●Intra-module Isolation, Field to Logic: 3000 VDC●ESD Protection: ±4 kV Contact for each terminal.Others:●Power LED: PWR (red)●CANopen Status LED: RUN (green) / ERR (orange)●8 LEDs as Upper Limit Alarm Indicators●8 LEDs as Lower Limit Alarm Indicators●Power Supply: Unregulated +10 ~ +30 V.DC●Power Consumption: 2 W.●Operating Temperature: -25 ~ +75 °C.●Storage Temperature: -30 ~ +80 °C.●Humidity: 10 to 90% RH, Non-condensing.●Dimensions: 33 mm x 99 mm x 78 mm (W x L x H) Detail.1.3 Features●Standard CANopen general I/O slave devices.●CANopen Version: DS-301, v4.02.●Device Profile: DSP-401, v2.1●Provide 8 differential analog input channels.●CANopen transfer rate: 10 kbps, 20 kbps, 50 kbps, 125 kbps, 250kbps, 500 kbps, 800 kbps, 1000 kbps.●Maximum CANopen slave Node-ID up to 99.●Support NMT, PDO, SDO, EMCY, SYNC, Guarding, and Heartbeatprotocol.●Pass the validation of the CANopen Conformance Test●Provide EDS file for the CANopen master interfaces1.4 Application2 Hardware2.1 Structure(Top View) (Bottom View)2.2 Node ID & Baud Rate Rotary SwitchThe rotary switches for node ID configure the node ID of the CAN-2017C module. These two switches are for the tens digit and the units digit of node ID. The node ID value of this demo picture is 32.Node ID rotary switchThe rotary switch for baud rate handles the CAN baud rate of the CAN-2017C module. The relationship between the rotary switch value and the practical baud rate is presented in the following table.Baud rate rotary switchRotary Switch Value Baud rate (k BPS)0 101 202 503 1254 2505 5006 8007 1000Baud rate and rotary switch2.3 LED DescriptionThe CAN-2017C needs a 10 ~ 30 V Power LEDDC power supply. Under a normal connection, a good power supply and a correct voltage selection, as the unit is turned on, the LED will be lighted up in red.The Run LED indicates the CANopen operation state. The description of the LED state is shown below. About the details, please refer to the section 2.3.1 of the CAN-2000C user manual.Run LEDLED Signal State DescriptionOFF No power Power Supply is not ready Single Flash Stopped The device is in Stopped state Blinking Pre-operation Device is in pre-operational state Always ONOperationDevice is in operational stateThe Error LED indicates the CANopen error state. The description of the LED state is shown below. About the details, please refer to the section 2.3.2 of the CAN-2000C user manual.Error LEDLED Signal State DescriptionOFF No error Device is in working condition. Single Flash Error Warning At least one error of the CAN controller has occurred. Double Flash Guarding fail. Guard event happened. Always ONBus OffThe CAN controller is bus off.When the switch of the 120Ω terminator resistor is turned on, the terminal resistor LED will be lightening.Terminal Resistor LEDFirst all, the “Analog Input global interrupt enable(SDO: 6423h)” must be enabled. If the analog input is more or less than the value of the “Analog Input global interrupt Upper/Lower Limit Integer(SDO: 6424h/6425h)” of the channel, the Upper/Lower Limit Alarm LED of the channel will be lightening.Upper/Lower Limit Alarm LED2.4 PIN AssignmentCAN-2017C 20-pin Connector2.5 Wire Connection3 Application3.1 Object DictionaryIdxGeneral Communication Entries Sidx Description TypeAttr Default1000h 0h device type UNSIGNED 32 RO00040191h1001h 0h error registerUNSIGNED 8RO 0h 1003h 0h largest subindex supported for “predefine error field”UNSIGNED 8 RO0h 1h actual error (the newest one) UNSIGNED 32 RO--- ... .........--- 5h actual error (the oldest one) UNSIGNED 32 RO --- 1005h 0h COB-ID of Sync message UNSIGNED 32 RW80h 1008h 0h manufacturer device name VISIBLE_STRING RO CAN-2017C 1009h 0h manufacturer hardware version VISIBLE_STRING RO1.2 100Ah 0h manufacturer software version VISIBLE_STRINGRO 1.00-20111101 100Ch 0h guard time UNSIGNED 16 RW 0h 100Dh 0h life time factorUNSIGNED 8RW 0h 1010h 0h largest subindex supported for “store parameters”UNSIGNED 8 RO1h 1010h 1h save all hardware parameterUNSIGNED 32 RW--- 1011h 0h largest subindex supported for “restore default parameters”UNSIGNED 8 RO1h 1011h 1h restore all default parameters UNSIGNED 32 RW --- 1014h 0h COB-ID of EMCY UNSIGNED 32 RW 80h+x 1015h 0h Inhibit time of EMCY UNSIGNED 16 RW 0h 1017h 0h producer heartbeat timeUNSIGNED 16 RW0h 1018h 0h largest subindex supported for “identity object”UNSIGNED 8 RO4h1h vender ID UNSIGNED 32 RO 0000013Ch 2h product code UNSIGNED 32 RO 00002017h3h revision number UNSIGNED 32 RO ---4h serial numberUNSIGNED 32 RO---Note: x is Node-ID of the moduleIdxSDO Communication Entries SidxDescriptionTypeAttr Default 1200h 0h largest subindex supported for “server SDO parameter” UNSIGNED 8RO21h COB-ID form client to server (RxSDO) UNSIGNED 32 RO 600h+x2h COB-ID form server to client (TxSDO)UNSIGNED 32 RO 580h+xNote: x is Node-ID of the moduleIdx RxPDO Communication Entry Sidx DescriptionTypeAttr Default 1400h 0h Number of entries UNSIGNED 8RO2 1h COB-ID used by RxPDO UNSIGNED 32 RW 200h+x 2h Transmission type UNSIGNED 8 RW FFh 1401h 0h Number of entries UNSIGNED 8RO2 1h COB-ID used by RxPDO UNSIGNED 32 RW 300h+x 2h Transmission type UNSIGNED 8 RW FFh 1402h 0h Number of entries UNSIGNED 8RO2 1h COB-ID used by RxPDO UNSIGNED 32 RW 400h+x 2h Transmission type UNSIGNED 8 RW FFh 1403h 0h Number of entries UNSIGNED 8RO2 1h COB-ID used by RxPDO UNSIGNED 32 RW 500h+x 2h Transmission type UNSIGNED 8 RW FFh 1404h 0h Number of entries UNSIGNED 8RO2 1h COB-ID used by RxPDO UNSIGNED 32 RW C000 0000h 2h Transmission typeUNSIGNED 8 RW--- … … …… … … 1409h 0h Number of entries UNSIGNED 8RO2 1h COB-ID used by RxPDO UNSIGNED 32 RW C000 0000h2hTransmission typeUNSIGNED 8 RW---Note: x is Node-ID of the moduleIdx RxPDO Mapping Communication Entry Sidx DescriptionTypeAttrDefault 1600h 0h Number of entries UNSIGNED 8 RW 0 1601h 0h Number of entries UNSIGNED 8 RW 0 1602h 0h Number of entries UNSIGNED 8RW 0 … … …… … … 1609h0hNumber of entriesUNSIGNED 8RWIdx TxPDO Communication Entry Sidx DescriptionTypeAttr Default 1800h 0h Number of entries UNSIGNED 8 RO5 1h COB-ID used by TxPDO UNSIGNED 32 RW180h+x 2h Transmission type UNSIGNED 8 RW FFh 3h Inhibit time UNSIGNED 160 4h Reversed ------ --- 5h Event timer UNSIGNED 16 0 1801h 0h Number of entries UNSIGNED 8 RO5 1h COB-ID used by TxPDO UNSIGNED 32 RW280h+x 2h Transmission type UNSIGNED 8 RW FFh 3h Inhibit time UNSIGNED 160 4h Reversed ------ --- 5h Event timer UNSIGNED 16 0 1802h 0h Number of entries UNSIGNED 8 RO5 1h COB-ID used by TxPDO UNSIGNED 32 RW380h+x 2h Transmission type UNSIGNED 8 RW FFh 3h Inhibit time UNSIGNED 160 4h Reversed ------ --- 5h Event timer UNSIGNED 16 0 1803h 0h Number of entries UNSIGNED 8 RO5 1h COB-ID used by TxPDO UNSIGNED 32 RW480h+x 2h Transmission type UNSIGNED 8 RW FFh 3h Inhibit time UNSIGNED 160 4h Reversed ------ --- 5h Event timer UNSIGNED 16 0 1804h 0h Number of entries UNSIGNED 8 RO5 1h COB-ID used by TxPDO UNSIGNED 32 RW 8000 0000h2hTransmission typeUNSIGNED 8RW---3h Inhibit time UNSIGNED 16 0 4h Reversed ------ --- 5h Event timerUNSIGNED 160 … … …… … … 1809h 0h Number of entries UNSIGNED 8 RO5 1h COB-ID used by TxPDO UNSIGNED 32 RW 8000 0000h2h Transmission type UNSIGNED 8 RW --- 3h Inhibit time UNSIGNED 160 4h Reversed --- --- ---5hEvent timerUNSIGNED 16Note: x is Node-ID of the module Idx TxPDO Mapping Communication Entry Sidx DescriptionTypeAttrDefault 1A00h 0h Number of entries UNSIGNED 8 RO 0 1A01h 0h Number of entries UNSIGNED 8RO41h AI value of channel 0 UNSIGNED 32 RW 6401 0110h 2h AI value of channel 1 UNSIGNED 32 RW 6401 0210h 3h AI value of channel 2 UNSIGNED 32 RW 6401 0310h 4h AI value of channel 3 UNSIGNED 32 RW 6401 0410h 1A02h 0h Number of entries UNSIGNED 8RO41h AI value of channel 4 UNSIGNED 32 RW 6401 0510h 2h AI value of channel 5 UNSIGNED 32 RW 6401 0610h 3h AI value of channel 6 UNSIGNED 32 RW 6401 0710h 4h AI value of channel 7 UNSIGNED 32 RW 6401 0810h 1A03h 0h Number of entries UNSIGNED 8 RO 0 1A04h 0h Number of entries UNSIGNED 8 RO 0 1A05h 0h Number of entriesUNSIGNED 8RO0 … … …… …… 1A09h0hNumber of entriesUNSIGNED 8ROIdx AI Channel Type Code Function Sidx DescriptionTypeAttr Default 2004h 0h Number of entries UNSIGNED 8 RO 8 1h AI type code of channel 0UNSIGNED 8RW 8 … ……… …8hAI type code of channel 7UNSIGNED 8RW8Note: Please refer to “Appendix B” for all supported AI type codeIdx Analog Input Function Sidx DescriptionTypeAttr Default 6401h 0h Number of entries UNSIGNED 8 RO 8 1h The AI value of channel 0INTEGER 16RO -- … ……… …8hThe AI value of channel 7INTEGER 16RO--Note: Please refer to “Appendix B” for AI value rangeWhen the “AI global interrupt trigger enable(SDO: 6423h)” is enabled, CAN-2017C will start to feedback the TxPDO while the AI value reaches the conditions configured in the “AI interrupt trigger selection(SDO: 6421h).” Users can set up the upper limit, lower limit, and the delta for each AI channel by SDO: 6424h, 6425h and 6426h.Idx Analog Input Global Interrupt Trigger Enable Sidx DescriptionTypeAttr Default 6423h0hAnalog Input Global Interrupt Trigger EnableBooleanRWIdx Analog Input Interrupt Trigger Selection Sidx DescriptionTypeAttr Default 6421h 0h Number of entriesUNSIGNED 8RO8 1h AI interrupt trigger selectionof channel 0 UNSIGNED 8 RW7 … ………… 8hAI interrupt trigger selectionof channel 0UNSIGNED 8 RW7Bit no. Analog interrupt trigger selection 0 The AI value exceeds the upper limit 1 The AI value is less than the lower limit2 The change of the AI value is more than the delta3 to 7Reversed If you set the bit 0 of the interrupt trigger selection to 1, the CAN-2017C would feedback the AI value automatically while this AI value exceeds the upper limit. The eight Upper/Lower Limit Alarm Indicators on the panel ofCAN-2017C will be lightening respectively. By the way, if AI upper limit or lower limit leads CAN-2017C to send too many TxPDO messages in a quite short time, you could modify the Inhibit time of the TxPDO. It will change the minimum period between the consequent CAN messages, and the bigger Inhibit time value you set, the longer time period between the two TxPDO messages you get.Idx Analog Input Interrupt Upper Limit Integer Sidx DescriptionTypeAttr Default 6424h 0h Number of entries UNSIGNED 8 RO 8 1h AI upper limit of channel 0INTEGER 32RW -- … ……… …8hAI upper limit of channel 7INTEGER 32RW--Note: Please refer to “Appendix B” for AI upper limit rangeIdx Analog Input Interrupt Lower Limit Integer Sidx DescriptionTypeAttr Default 6425h 0h Number of entries UNSIGNED 8 RO 8 1h AI lower limit of channel 0INTEGER 32RW -- … ……… …8hAI lower limit of channel 7INTEGER 32RW--Note: Please refer to “Appendix B” for AI lower limit rangeIdx Analog Input Interrupt Delta Unsigned Sidx DescriptionTypeAttr Default 6426h 0h Number of entries UNSIGNED 8 RO 8 1h AI delta value of channel 0UNSIGNED 32RW 3E8h … ……… …8hAI delta value of channel 7UNSIGNED 32RW3E8hNote: These values are used to define the acceptable AI change ranges for each AI channels. The default for these values is 1000, and may have different range for the physical value because of the settings of the type code. Please refer to the appendix B for the type code definition.3.2 Store and Restore ObjectThe users can write the value 65766173h to object with index 1010h and subindex 1 to save the application setting, or write the value 64616F6Ch to object with index 1011h and subindex 1 and reboot the module to load the factory default. The following table lists the relative objects which will be stored or restored after writing these two objects. The factory default for these objects is also shown below.Index SubIndex Description FactoryDefault2004 h 1 ~ 8 AI type codes for channel 0~ 7 08h 6421 1 ~ 8 AI interrupt trigger selections for channel 0 ~ 7 07h 6423 0 AI global interrupt enable 0 6424 1 ~ 8 AI interrupt upper limits for channel 0 ~ 7 7FFFh 6425 1 ~ 8 AI interrupt lower limits for channel 0 ~ 7 E99Ah 6426 1 ~ 8 AI interrupt delta vlues for channel 0 ~ 7 3E8h 1400h 1 ~ 2 RxPDO1 parameter -- ... ... ... ... 1409h 1 ~ 2 RxPDO10 parameter -- 1600h 0 ~ 8 RxPDO1 mapping information -- ... ... ... ... 1609h 0 ~ 8 RxPDO10 mapping information -- 1800h 1 ~ 5 TxPDO1 parameter -- ... ... ... ... 1809h 1 ~ 5 TxPDO10 parameter --1A00h 0 ~ 8 TxPDO1 mapping information -- ... ... ... ...1A09h 0 ~ 8 TxPDO10 mapping information --3.3 Application ObjectThe users can read the object with index 6401h and subindex 1 ~ 8 to get the analog value of the channel 0 ~ 7, and the range for each AI type codes are listed in Appendix B. If the users wants to change the analog input type, write the type code to the object with index 2004h and subindex 1 ~ 8. For example, if the node ID of CAN-2017C is 1, the following command would be used:11-bit COB-ID (bit)RTR DataLength8-byte Data (byte) Func CodeNode ID10 9 8 7 6 5 4 3 2 1 0 0123456711 0 0 0 0 0 0 0 0 10 82F 04 20 01 09 00 00 00SDO clientSDO server(CAN-2017C)11-bit COB-ID (bit)RTRData Length 8-byte Data (byte) Func CodeNode ID10 9 8 7 6 5 4 3 2 1 0 01234 5 6 7 10 1 1 0 0 0 0 0 0 10 460 04 20 01--------SDO clientSDO server (CAN-2017C)Writing object with index 2004h and subindex 1 with 09h means to change the type code of the AI channel 0 with 09h (the AI measurement range is -5V ~ +5V).11-bit COB-ID (bit)RTR DataLength8-byte Data (byte) Func CodeNode ID10 9 8 7 6 5 4 3 2 1 0 0123456711 0 0 0 0 0 0 0 0 10 840 01 64 01 00 00 00 00SDO clientSDO server (CAN-2017C)11-bit COB-ID (bit)RTRData Lengt h8-byte Data (byte) Func CodeNode ID10 9 8 7 6 5 4 3 2 1 0 01234567 10 1 1 0 0 0 0 0 0 10 4 4B 01 64 01 FF 3F ----SDO clientSDO server (CAN-2017C)Reading object with index 6401h and subindex 1 means to get the value of the AI channel 0. According to the type code 09h set before, the replied value of the AI channel 0 is 3FFFh (+2.5V).3.4 Default PDO MappingRxPDO mapping list:ID Len D 0 D 1 D 2 D 3 D 4 D 5 D 6 D 7 200h + x 0 Reserved300h + x 0 Reserved400h + x 0 Reserved500h + x 0 ReservedTxPDO mapping list:ID Len D 0 D 1 D 2 D 3 D 4 D 5 D 6 D 7 180h + x 0 Reserved280h + x 8 AI ch0 AI ch1 AI ch2 AI ch3 380h + x 8 AI ch4 AI ch5 AI ch6 AI ch7 480h + x 0 Reserved3.5 EMCY CommunicationThe data format of the emergency object data follows the structure bellows.Byte 0 1 2 3 4 5 6 7 Content Emergency Error Code Error register Manufacturer specific Error FieldEach bit on the error register is defined as follows.Bit Meaning0 generic error1 current2 voltage3 temperature4 communication error (overrun, error state)5 device profile specific6 reserved (always 0)7 manufacturer specificThe emergency error codes and the error register are specified in the following table.Emergency Error Code ErrorRegisterManufacturer Specific Error Field DescriptionHigh Byte LowByteFirstByteLast Four Bytes00 00 00 00 00 00 00 00 Error Reset or No Error10 00 81 01 00 00 00 00 CAN Controller Error Occur 50 00 81 02 00 00 00 00 EEPROM Access Error81 10 11 04 00 00 00 00 Soft Rx Buffer Overrun81 10 11 05 00 00 00 00 Soft Tx Buffer Overrun81 10 11 06 00 00 00 00 CAN Controller Overrun81 30 11 07 00 00 00 00 Lift Guarding Fail81 40 11 08 00 00 00 00 Recover From Bus Off82 10 11 09 00 00 00 00 PDO Data Length ErrorFF 00 80 0A 00 00 00 00 Request To Reset Node OrCommunicationFF 00 2E 0B 00 00Upper limitalarm 00 00Low limitalarmUpper/Low Limit Alarm ForEach ChannelAppendix A: Dimension CAN-2017C dimension:Unit: mmAppendix B: Type Code Definition Type Code Definition for CAN-2017CType Code Input Range Data FormatMinValueMaxValue08h -10 to +10VEngineer Unit -10V +10V 2's Complement HEX 8000h 7FFFh09h -5 to +5VEngineer Unit -5V +5V 2's Complement HEX 8000h 7FFFh0Ah -1 to +1VEngineer Unit -1V +1V 2's Complement HEX 8000h 7FFFh0Bh -500 to +500 mVEngineer Unit -500mV +500mV 2's Complement HEX 8000h 7FFFh0Ch -150 to +150 mVEngineer Unit -150mV +150mV 2's Complement HEX 8000h 7FFFh0Dh-20 to +20 mA(with 125Ωresistor)Engineer Unit -20mA +20mA2's Complement HEX 8000h 7FFFh。
ASD936无线充智能测试设备用户使用手册说明书

用户使用手册ASD936无线充智能测试设备© 版权归属于昂盛达电子有限公司Ver2.0 /Nov, 2020/ ASD936注意事项感谢您购买和使用我司产品!本用户手册适用于ASD936无线充智能测试设备产品。
在使用前,请认真阅读本手册。
收到产品后请仔细检查产品外观、型号、合格证、用户手册及保修单等附件是否齐全。
若有问题请及时与经销商或我司联系;若发现产品外观破损,请勿通电使用,以免引发触电事故。
在使用过程中请严格遵守各项安全规范,若忽视或不遵守相关规范进行操作,将可能影响仪器性能,导致仪器损坏,甚至危及人身安全。
对不遵守安全规范而导致的任何后果,我司不予承担。
非专业人员请勿打开机箱,请勿擅自对仪器内部电路及元件进行更换或调整。
请在安全环境下使用,在通电前请确认输入电源的参数是否符合要求。
本手册所描述的可能并非产品的全部内容。
我司有权对本产品的性能、功能、内部结构、外观、附件等进行更改,对用户手册进行更新而不另行通知。
本手册最终解释权归我司所有。
客服电话: 400-1656-165目录第一章验货安装 (5)1.1验货 (5)1.2清洁 (5)1.3连接部分的安装 (5)1.4安装尺寸 (5)1.5安装位置 (5)第二章快速入门 (6)2.1自检 (6)2.2前面板介绍 (7)2.3后面板介绍 (7)2.4触控屏介绍 (8)第三章技术规格 (9)第四章功能特性 (10)4.1研发模式 (10)4.2自动模式 (11)第五章基本操作 (13)5.1开机 (13)5.2研发模式 (16)5.3自动模式 (16)5.3.1 参数设置 (17)5.3.2 测试选项 (23)5.3.3 启动测试 (24)5.3.4 导出报表 (24)5.4其他功能 (25)第六章设备接口 (28)6.1前面板接口 (28)6.2后面板接口 (28)6.3触控屏接口 (29)第六章常见问题 (30)第七章 保修协议 (15)简介ASD936无线充智能测试设备由测试仪及触控屏两部分组成,集快充电源、电子负载功能于一体。
DASEN-3i_连接手册

3.3.1 机架接地(FG) ………………………………………………………………………… 9
3.3.2 电缆的屏蔽箝制金属夹……………………………………………………………… 11
3.3.3 连接瞬间放电断路器………………………………………………………………… 12
3.3.4 关于雷击浪涌的保护对策………………………………………………………………
附录 3.4 关于电柜的结构…………………………………………………………………… 80
附录 3.4.1 控制电柜本体的对策………………………………………………………………
注意 2.安装方面的注意事项
请在非易燃材料上安装控制单元或操作面板。若直接或就近在易燃材料上安装可能会引起火灾。 请务必严守安装的方向。 请不要安装,运行已经损坏或缺少部件的控制单元,操作面板。 请不要将螺钉,金属屑等导电物质或油等易燃物质混入控制单元,操作面板。 控制单元,操作面板都为精密设备,请注意防止碰摔,强力冲撞。 请不要将操作面板安装在有冷却液的位置。
第 5 章 连接 I/O 接口………………………………………………………………… 27
5.1 I/O 接口概略……………………………………………………………………………
2
7
5.1.1 I/O 接口的种类……………………………………………………………………… 27
5.1.2 I/O 单元的连接举例………………………………………………………………… 27
3.连接方面的注意事项 请不要接入本说明书所示以外的电压,否则会导致设备损坏或出现事故。 由于不正当的连接会损坏设备,请将电缆按指定插头进行连接。 使用象继电器这样的感性负载时,请在负载上并联一个二极管以抑制噪音。 使用象灯泡这样的容性负载时,请一定在负载上串联一个保护电阻以限制负载电流。 在通电状态下,请不要拔插各单元间的连接电缆。 在通电状态下,请不要拔插各线路板。 使用外围设备时、请一定注意 RS-232C 连接线的拔插方法。 设备一侧的 AC 电源开关一定要选用双向型开关,务必确认设备一侧的 AC 电源开关在 OFF 的状态 下拔插连接线。
DASEN-3i维修手册

DASEN-3i维修手册请仔细阅读本手册,并作为后续参考大森数控「目录」第 1 章日常检测维修与定期检测维修………………………………………… 11 1 1 1 2 2 4 5 6 7 8 8 8 8 9 91.1 维修用工具……………………………………………………………………………… 1.1.1 测量工具 …………………………………………………………………………… 1 .1.2 工具 ………………………………………………………………………………… 1.2 维护项目………………………………………………………………………………… 1.3 更换方法………………………………………………………………………………… 1.3.1 连接与断开电缆……………………………………………………………………… 1 .3.2 更换控制器 ………………………………………………………………………… 1.3.3 更换控制器内的控制板 ……………………………………………………………… 1.3.4 更换 CRT …………………………………………………………………………… 1.3.5 更换 LCD …………………………………………………………………………… 1.4 清洁及安装……………………………………………………………………………… 1.4.1 面板的清洁…………………………………………………………………………… 1.4.2 CRT 的安装…………………………………………………………………………… 1.4.3 LCD 的安装…………………………………………………………………………… 1.5 部件寿命………………………………………………………………………………… 1.5.1 更换电池 ……………………………………………………………………………第2章故障诊断……………………………………………………………………… 1010 10 11 12 12 122.1 LED 一览………………………………………………………………………………… 2.1.1 控制单元 LED 一览…………………………………………………………………… 2.1.2 基本 I/O 单元 LED 一览……………………………………………………………… 2.2 故障处理……………………………………………………………………………… 2.2.1 确认故障发生时的状况……………………………………………………………… 2.2.2 疑难解答……………………………………………………………………………维修说明第 1 章 日常检测维修与定期检测维修 1.1 维修用工具 1.1.1 测量工具为了确认NC单元的电压是否正确提供、NC单元的接线是否正确等,或者,进行简单的故障处理需要下列 必要的测量工具。
ASCO 300系列D Design ATS中文操作手册_381333-329A(CNs)_97C
注:如“常用”和“备用”位置颠倒, 则该操作亦会反向。
2. 如图所示,握住附装的维护手柄并用拇 指和手指转动手柄以进行手动操作。 维护手柄 进行下面操作前,确认维护手柄已被取下 的转动与配重块的方向相反。如图所示,向上 或向下转动以手动操作转换开关。 操作应顺畅 下面继续 2-电压检查。 且无停滞。若非如此,检查是否存在运输损坏 或结构碎片。
开关状态接点
薄膜操作面板
负载电源连接
控制器 备用电源连接
转换开关 维护手柄(见操 作手册的警告)
发电机启动端子
常用电源连接 电缆隔片(见安装)
典型的 230 安带外箱 ATS
1、 安
ASCO 300 系列自动转换开关(ATS)出厂
装
150A、200A、230A 转换开关配有三个电缆
前已完成接线及测试。 安装要求固定在支撑底 隔片。当连接电缆时,如图 1-1 所示将电缆穿 座上,防止机柜移动并保护外箱。 过隔片。把电缆隔片置于距端子 38mm 处。
小
心
防止建筑沙砾及金属屑使自动转换开关发 生故障或缩短寿命。
电缆束 连接电源线
具有插头的电缆束(双插头)将转换开关 连接至控制器左侧。
电源线经测试后, 按照 300 系列 ATS 附带 辅助电路 的接线图所示将电缆连接至自动转换开关的 相应接线端子上。 确保所用的端子与进行安装 将辅助电路导线按照 300 系列自动转换 的电源线匹配。 标准接线端子为无焊螺钉型且 参见 能匹配开关附带的图纸所列出的电缆规格。 小 开关提供的接线图接在相应接线端子处。 心剥除电源线上的绝缘层, 避免划伤或环剥导 第 5 控制功能 连接必要的辅助电路。 线。用钢丝刷清除电源线表面的氧化层。当使 用铝线时,在导体上涂接合剂。电缆端子按照 额定值标签上指定的扭矩拧紧。
HT-IDE3000 使用手册

HT-IDE3000使用手册二○○六年七月Copyright 2006 by HOLTEK SEMICONDUCTOR INC.本使用手册版权为盛群半导体股份有限公司所有,非经盛群半导体股份有限公司书面授权同意,不得通过任何形式复制、储存或传输。
注意使用指南中所出现的信息在出版当时相信是正确的,然而盛群对于说明书的使用不负任何责任。
文中提到的应用目的仅仅是用来做说明,盛群不保证或表示这些没有进一步修改的应用将是适当的,也不推荐它的产品使用在会由于故障或其它原因可能会对人身造成危害的地方。
盛群产品不授权使用于救生、维生器件或系统中做为关键器件。
盛群拥有不事先通知而修改产品的权利。
对于最新的信息,请参考我们的网址目录第一部份集成开发环境 (1)第一章概要与安装 (3)HT-IDE集成开发环境 (3)盛群单片机仿真器(HT-ICE) (5)HT-ICE接口卡 (5)OTP烧录器 (5)OTP适配卡 (5)系统配置 (6)安装 (7)系统需求 (7)硬件安装 (7)软件安装 (8)第二章快速开始 (13)步骤一:建立一个新项目 (13)步骤二:将源程序文件加到项目中 (13)步骤三:编译项目 (13)步骤四:烧录OTP单片机 (14)步骤五:传送程序与掩膜选项单至Holtek (14)第三章菜单−文件/编辑/视图/工具/选项 (15)启动HT-IDE3000系统 (15)文件菜单 (18)编辑菜单 (19)视图菜单 (20)iMask Option (21)Diagnose (22)Writer (23)Library Manager (23)V oice/VROM Editor (24)V oice/Download (24)LCD Simulator (25)Virtual Peripheral Manager (25)Data EEPROM Editor (25)选项菜单 (26)Project Command (26)Debug Command (27)Directories Command (29)Editor Command (30)Color Command (30)Font Command (30)第四章菜单−项目 (31)建立新项目 (31)打开和关闭项目 (32)管理项目的源文件 (33)将源程序文件加到项目中 (33)从项目中删除源程序文件 (34)向上或向下移动源程序文件的位置 (34)建立项目的任务文件 (34)建立项目的任务文件 (35)重建项目的任务文件 (35)编译 (35)编译程序 (35)Print Option Table Command (36)Generate Demo File (.DMO) Command (36)第五章菜单−除错 (37)复位HT-IDE3000系统 (38)从HT-IDE3000复位 (39)从应用电路板复位 (39)应用程序的硬件仿真 (40)硬件仿真应用程序 (40)停止硬件仿真应用程序 (40)执行应用程序到指定的程序行 (40)直接跳跃到应用程序中的某一行 (41)单步执行 (41)ii断点特性 (43)断点项目的说明 (43)如何设定断点 (45)跟踪应用程序 (47)跟踪的初步设定 (47)停止跟踪 (49)跟踪的启动与停止 (49)跟踪记录的格式 (52)除错器的命令模式 (54)进入命令模式与离开命令模式 (54)命令模式所支持的功能 (54)Log文件格式 (61)HT-COMMAND错误信息 (62)第六章菜单−窗口 (63)窗口菜单命令 (64)第七章软件仿真 (69)开始仿真 (70)第八章OTP烧录 (71)简介 (71)安装 (72)烧录器转接座 (72)使用HT-HandyWriter烧写OTP单片机 (73)系统信息 (81)第二部份开发语言与工具 (83)第九章汇编语言和编译器 (85)常用符号 (85)语句语法 (86)名称 (86)操作项 (86)操作数项 (86)注释 (86)汇编伪指令 (87)条件汇编伪指令 (87)文件控制伪指令 (88)程序伪指令 (90)数据定义伪指令 (94)iii汇编语言指令 (100)名称 (100)助记符 (100)操作数,运算子和表示式 (100)其它 (103)前置引用 (103)局部标号 (103)汇编语言保留字 (104)编译器选项 (105)编译列表文件格式 (105)源程序列表 (105)编译总结 (106)其它 (106)第十章盛群C语言 (109)简介 (109)C语言的程序结构 (110)语句 (110)注释 (110)标识符 (111)保留字 (111)数据类型 (111)数据类型与大小 (111)宣告 (112)常量 (113)整型常量 (113)字符型常量 (114)字符串常量 (114)枚举常量 (114)运算符 (115)算术运算符 (115)关系运算符 (115)等式运算符 (115)逻辑运算符 (116)位运算符 (116)复合赋值运算符 (116)递增和递减运算符 (117)条件运算符 (117)逗号运算符 (117)运算符的优先权与结合性 (118)类型转换 (119)程序流程控制 (120)函数 (124)古典形式 (124)iv指针与数组 (125)指针 (125)数组 (125)结构体与共用体(Structures and Unions) (126)前置处理伪指令 (127)盛群C语言的扩充功能与限制 (132)关键字 (132)存储器区块(memory bank) (132)位数据类型 (133)内嵌式汇编语言 (133)中断 (134)变量 (135)静态变量 (135)常量 (135)函数 (135)数组 (136)常量 (136)指针 (136)初始值 (136)乘法/除法/模 (137)内建函数 (137)堆栈 (138)第十一章混合语言 (139)Little Endian (139)函数与参数的命名规则 (140)全局变量 (140)局部变量 (140)函数 (141)函数的参数 (142)参数的传递 (142)返回值 (142)寄存器内容的保存 (142)在C程序调用汇编语言函数 (143)在汇编程序调用C函数 (144)使用汇编语言撰写ISR函数 (146)第十二章连接器 (147)连接器的作用 (147)连接器的选项 (147)函数库文件 (147)程序段地址 (148)生成地址映射文件 (148)地址映射文件 (148)连接器的任务文件与除错文件 (149)v第十三章函数库管理器 (153)函数库管理器的功能 (153)设定函数库文件 (153)生成新的函数库文件 (155)往函数库文件中添加程序模块 (155)从函数库文件中删除程序模块 (155)从函数库文件中取得程序模块并生成目标文件 (156)目标模块的信息 (156)第十四章LCD仿真器 (157)简介 (157)LCD面板配置文件 (157)面板文件的文件名与项目的关系 (158)选择HT-LCDS (158)LCD面板图形文件 (159)建立LCD面板配置文件 (160)建立面板的配置结构 (160)选择图形并设定位置 (161)加入新的图形 (161)删除图形 (162)改变图形 (162)改变图形位置 (162)如何加入用户定义的矩阵 (163)使用Panel Editor定义图形 (164)使用批处理文件将图形加入面板 (165)选择LCD面板的颜色 (165)为VFD面板设定颜色样式 (166)LCD仿真 (167)停止仿真 (167)第十五章虚拟外围设备管理器(VPM) (169)简介 (169)VPM窗口 (170)VPM菜单 (171)文件菜单 (171)功能菜单 (172)VPM外围组件 (174)LED (174)Button/Switch (175)Seven Segment Display (176)快速开始的范例 (178)霹雳灯 (178)vi附录A 编译器使用的保留字 (183)汇编语言保留字 (183)指令集 (184)附录B 编译器的错误信息 (187)附录C 连接器的错误信息 (191)附录D 函数库的错误信息 (197)附录E 盛群C编译器的错误信息 (199)错误码 (199)警告码 (204)致命码 (205)viiviii第一部份集成开发环境123第一章概要与安装 在简化应用程序的开发过程方面,单片机支持工具的重要性和有效性是不可低估的。
aqa沈阳 CAK系列车床故障处理ssq

沈阳CAK系列车床故障例1 、主轴无力(2007.6.26)一台CAK3675数车,系统:GSK980TD,变频器:沈阳北辰SC1000,主轴电机:5.5KW,主轴转速:200-3000(手动卡盘2000)。
一用户反映才买的4台CAK3675机床,在低速50r/min,吃刀量1mm,F0.1mm出现闷车(即主轴停住),后在相同速度下,手逮住卡盘(注意,此法不可取,十分危险)也能使主轴停下。
此现象明显是转矩太低引起。
由于用户不了解变频调速原理,当变频器带普通电机长期运行时,由于散热效果变差,电机温度升高,所以不能长期低速运行,如果要低速恒转矩长期运行,必须使用专用变频电机。
再加上没有仔细看说明书,以为从0-2000转都能正常使用,按说明书要求最低转速是200转,低于此转速虽然也能转动,但转矩很低,将影响正常加工,应避免安排加工低于200转以下的工件。
北辰变频器是V/F控制方式,这种变频器本身就是在低速时输出转矩较低,要提高低速输出转矩,只能修改参数满足其要求。
主要有以下几个参数:1、转矩提升(补偿):根据现场情况适当增加设定值,加大后要十分注意电机的温度和电流,过大将会损坏电机;2、中间输出频率电压;3、最低输出频率电压。
参数1一般单独使用;参数2、3在不使用1参数时使用,低速输出转矩不足时根据实际情况增大2、3参数设定值,如果出现启动时冲击较大,减小设定值。
本例适当增大设定值后问题解决。
其它变频器也可以参照本例。
强烈建议不要长期在机床规定最低主轴转速下运行。
以上方法,仅供参考。
例2 、Z轴运行不稳(2007.6)机型:CAK50135nj ,系统:GSK980TD故障现象:快移倍率100%的情况下,在自动运行G00时,Z轴出现一冲一冲的现象,快移倍率50%的情况下,则无此现象;快移倍率50%、100%的情况下,手动快移也无一冲一冲的现象。
排除方法:初步分析是Z轴的快移加减速时间参数不合适造成,原Z轴加减速时间参数25#=80,由于不同机床有不同的机械性能,故根据现场情况试把参数减小为60,下电后再上电,故障排除。
ICP DAS DL-10 用户手册说明书

RS-485 Remote Temperature and HumidityEnglish Ver. 1.3, Aug. 2019 WARRANTYAll products manufactured by ICP DAS are warranted against defective materials for a period of one year from the date of delivery to the original purchaser.WARNINGICP DAS assumes no liability for damages consequent to the use of this product. ICP DAS reserves the right to change this manual at any time without notice. The information furnished by ICP DAS is believed to be accurate and reliable. However, no responsibility is assumed by ICP DAS for its use, nor for any infringements of patents or other rights of third parties resulting from its use. COPYRIGHTCopyright © 2019 by ICP DAS. All rights are reserved. TRADEMARKNames are used for identification only and may be registered trademarks of their respective companies.CONTACT USIf you have any questions, please feel free to contact us via email at:******************,************************TABLE OF CONTENTS1.INTRODUCTION (3)1.1P ACKAGE L IST (3)2.HARDWARE INFORMATION (4)2.1A PPEARANCE &P IN A SSIGNMENTS (4)2.2S PECIFICATION (5)2.3D IMENSIONS (6)2.4F ACTORY D EFAULT S ETTINGS (6)3.GETTING STARTED (7)3.1C ONNECTING THE P OWER AND THE H OST PC (7)3.2I NSTALLING S OFTWARE ON Y OUR PC (8)3.3S EARCH M ODULE (8)How to solve when the DCON Utility cannot find the DL-10 module? (12)3.4C ONFIGURING M ODULE (13)Configuration (14)AI (Humidity & Temperature) (15)4.MODBUS REGISTER TABLE (BASED0) (16)D ISCRETE I NPUTS (1XXXX) (16)I NPUT R EGISTER (3XXXX) (16)H OLDING R EGISTER (4XXXX) (17)APPENDIX: REVISION HISTORY (18)1. IntroductionThe DL-10 is a RS-485 remote temperature and humidity module that gives you real time temperature and humidity information at the same time. It contains an RS-485 communication interface and an sensor for measuring temperature and humidity. The DL-10 module supports Modbus RTU communication protocol for getting measured temperature and humidity values. DCON Utility Pro provides easy and convenient interfaces for users to configure the module. Based on an amazing tiny form-factor, the DL-10 achieves the maximum space savings that allows it to be easily installed anywhere.1.1 P ackage ListThe shipping package includes the following items:More Information DL-10 Product Page:/root/product/solutions/remote_io/rs-485/dl_series/dl-100t485.html Documentation:/pub/cd/usbcd/napdos/dl_100/Free Development Software – DCON Utility Pro:/root/product/solutions/software/utilities/dcon_utiltiy_pro.htmlQuick StartDL-10 NOTEIf any of these items is missing or damaged, please contact your local distributor for more information. Keep the shipping materials and overall package in case youwant to ship the module back in the future.2. Hardware Information2.1 A ppearance & Pin AssignmentsThe front panel and Rear panel of the DL-10 module contain the Temperature and Humidity sensor, init switch, power and RS-485 connector and pin assignments. Front PanelRear PanelInit SwitchPush up2.2S pecificationTemperature SensorMeasuring Range -20 ~ +60°C (-4 ~ +140 °F) Resolution 0.1°CAccuracy Typical: ± 0.4°C; refer to Figure 2 Precision ± 0.1% RHHumidity SensorMeasuring Range 10 ~ 95 % RHResolution 0.1 % RHAccuracy Typical: ± 3% RH @ 20 ~ 80 % RH; refer to Figure 1 Precision ± 0.1% RH CommunicationInterface RS-485; non-isolatedBaudrate 1200 ~ 115200 bpsData Format N, 8, 1Protocol Modbus RTUMax. Modules on same bus 32PowerInput Range +10 ~ +30 V DCPower Consumption 0.05 WMechanicalDimensions (W x L x H) 25 mm x 20.2 mm x 30 mm Installation DIN-Rail; Wall Mount EnvironmentOperating Temperature -20 ~ +60°CStorage Temperature -30 ~ +80°CAmbient Relative Humidity 10 ~ 95 % RH, Non-condensing2.3 D imensionsThe following diagrams provide the dimensions of the DL-10 module and can be used as a reference when defining the specifications for any custom enclosures. All dimensions are in millimeters.2.4 F actory Default SettingsLeft Side ViewFront View Right Side View Rear View Top View Bottom View3. Getting StartedThis chapter provides a basic overview of how to configure and operate your DL-10 module.3.1 C onnecting the Power and the Host PCPrepare for deviceRS-232 to RS-485 Converter: tM-7520U (optional) Exterior power supply device: MDR-20-24 (optional)WiringPower Supply +10 ~ +30 V DC(e.g., MDR-20-24)VccGNDD-D+CA-0915 CableConnect both the DL-10 module and the Host PC via the tM-7520U.Connect the Vcc pin to positiveterminal on a 10 ~ 30 V DC power supply , and connect the GND pin to the negative terminal .3.2I nstalling Software on Your PCDecompress DCON Utility Pro.zip, which can be obtained from theICP DAS web site at/pub/cd/8000cd/napdos/driver/dcon_utility/3.3S earch ModuleStep 1Run the DCON Utility Pro softwareDouble click the DCON_Utility_Pro.exe.Step 2Click the button to open the “Comport Option”dialog box.Step 3Select COM Port (e.g., COM9) depends on Host PC COM port that connects to DL-10.Step 4Select the Baud Rate (e.g., 9600 and 115200) depends on DL-10 in the Baud Rate option.Step 5Select the protocol (e.g., Modbus RTU) depends on DL-10 in the Protocol option.Step 6Select the Data Format (e.g., N, 8, 1) depends on DL-10 in the Format option and click “OK” button.Step 7Click the button to search DL-10 module.Step 8The DL-10 module will be displayed in list and click the button.How to solve when the DCON Utility cannot find the DL-10 module?Ensure that the power supply and the RS-485 wiring for the DL-10 are configured correctly, refer to the Section 3.1 Connecting the Power and the Host PC . If the DCON Utility still cannot find the DL-10 when normal wiring and power up, please follow the procedure described below:1. Use the blade of a flat-head screwdriver to set the “Init Switch 1” on the DL-10 to the “ON” (Init Mode) position, and reboot the DL-10 module.2. In the Init mode , refer to Steps 2 to 8 in “Section3.3 Search Module ” to execute the searchagain.3. Confirm that the DCON Utility has found the DL-10, use the blade of a flat-head screwdriver to set the “Init Switch 1” on the DL-10 to the “1” (Run Mode) position, and reboot the DL-10 module.Push upInitNOTE Init Switch 2: N/ANOTE Init Switch 2: N/ARun3.4C onfiguring ModuleIn the DCON Utility Pro software, click the module name to open the “DL10 Firmware[0100]” dialog box, allowing you to configure the settings for DL-10 and verify the humidity and temperature, each of which will be described in more detail below.ConfigurationAfter click the “Configuration” tab will display the configuration page allowing you to configure the settings for DL-10, including the Address, Baud Rate and Data Format.AI (Humidity & Temperature)Click the “AI” tab to see the measured humidity and temperature values.4.Modbus Register Table (Based0)Appendix: Revision History This chapter provides revision history information to this document. The table below shows the revision history.。
Inovonics EE1941XS EN1941XS RF模块安装和使用手册说明书
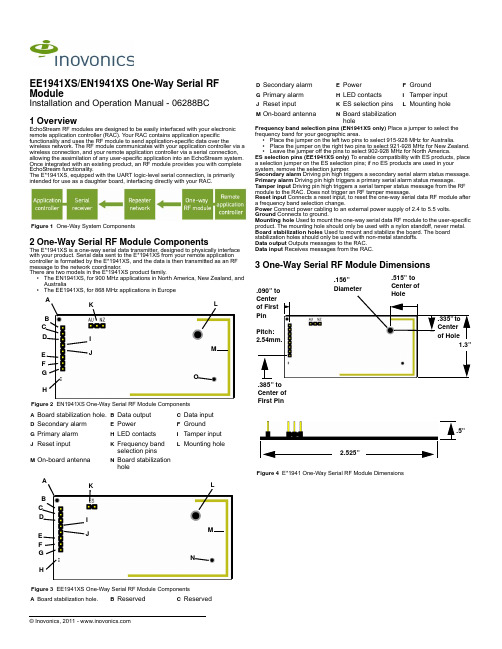
EE1941XS/EN1941XS One-Way Serial RF ModuleInstallation and Operation Manual - 06288BC 1 OverviewEchoStream RF modules are designed to be easily interfaced with your electronic remote application controller (RAC). Your RAC contains application specific functionality and uses the RF module to send application-specific data over thewireless network. The RF module communicates with your application controller via a wireless connection, and your remote application controller via a serial connection, allowing the assimilation of any user-specific application into an EchoStream system. Once integrated with an existing product, an RF module provides you with complete EchoStream functionality.The E*1941XS, equipped with the UART logic-level serial connection, is primarilyintended for use as a daughter board, interfacing directly with your RAC.Figure 1 One-Way System Components2 One-Way Serial RF Module ComponentsThe E*1941XS is a one-way serial data transmitter, designed to physically interface with your product. Serial data sent to the E*1941XS from your remote application controller is formatted by the E*1941XS, and the data is then transmitted as an RF message to the network coordinator.There are two models in the E*1941XS product family.•The EN1941XS, for 900 MHz applications in North America, New Zealand, and Australia•The EE1941XS, for 868 MHz applications in EuropeFigure 2 EN1941XS One-Way Serial RF Module Components Figure 3 EE1941XS One-Way Serial RF Module Components Frequency band selection pins (EN1941XS only) Place a jumper to select the frequency band for your geographic area.•Place the jumper on the left two pins to select 915-928 MHz for Australia.•Place the jumper on the right two pins to select 921-928 MHz for New Zealand.•Leave the jumper off the pins to select 902-928 MHz for North America.ES selection pins (EE1941XS only) To enable compatibility with ES products, place a selection jumper on the ES selection pins; if no ES products are used in your system, remove the selection jumper.Secondary alarm Driving pin high triggers a secondary serial alarm status message.Primary alarm Driving pin high triggers a primary serial alarm status message.Tamper input Driving pin high triggers a serial tamper status message from the RF module to the RAC. Does not trigger an RF tamper message.Reset input Connects a reset input, to reset the one-way serial data RF module after a frequency band selection change.Power Connect power cabling to an external power supply of 2.4 to 5.5 volts. Ground Connects to ground.Mounting hole Used to mount the one-way serial data RF module to the user-specific product. The mounting hole should only be used with a nylon standoff, never metal.Board stabilization holes Used to mount and stabilize the board. The board stabilization holes should only be used with non-metal standoffs.Data output Outputs messages to the RAC.Data input Receives messages from the RAC.3 One-Way Serial RF Module DimensionsFigure 4 E*1941 One-Way Serial RF Module DimensionsA Board stabilization hole.B Data outputC Data inputD Secondary alarmE PowerF GroundG Primary alarmH LED contactsI Tamper inputJ Reset inputK Frequency bandselection pins L Mounting holeM On-board antennaN Board stabilizationholeA Board stabilization hole.B ReservedC ReservedB C G D I JE F K LMHA OB C G D I JE F K LMHA ND Secondary alarmE PowerF GroundG Primary alarmH LED contactsI Tamper inputJ Reset inputK ES selection pinsL Mounting holeM On-board antennaN Board stabilizationhole1.3”Pitch: 2.54mm..385” to Center of First Pin.090” to Center of First Pin .335” to Center of Hole.515” to Center of Hole.156” Diameter.5”2.525”4 One-Way Serial RF Module Connections and Output Jumpers5 InstallationA The RF module must only be connected at the eight pin header or eight pin platedthru-holes.B All cables and wires must be routed away from the component side of the RFmodule.C The integrated antenna must not be tampered with; no connection to an alternateantenna is provided.D The application module must not include an integrated secondary colocated radiomodule.E The one-way serial data RF module antenna should be placed so that it is facingaway, or otherwise isolated from, your device’s ground plane.F Components that are sensitive to RF transmission, such as high gain circuits,should be isolated from the antenna to prevent interference.G One-way serial RF modules should not be mounted on metal surfaces or insidemetal enclosures. They should also not be mounted where sheet metal ductwork, wire mesh screens, etc. might block transmissions.H The RF module should be integrated so the antenna is unobstructed by the enduser’s PCB, batteries, or any other conductive material.Figure 5The RF module should be integrated so the antenna is unobstructed6 One-Way Serial RF Module Requirements6.1 Timing requirementsAll data is sent at a default rate of 9600 baud, no parity, 8 data bits and one stop bit. The data is transmitted least significant bit first.6.2 Power RequirementsThe E*1941XS has an on-board voltage regulator. Connect power cabling to an external power supply (Vcc) of 2.4 to 5.5 volts. Voltage must be sustained at 2.4 volts or above and supply 100 milliamps during the transmit cycle.EN1941XSAssuming check-in messages every 3 minutes and infrequent alarm messages (one per day, on average), the average current draw is 32 uA. Peak current draw while transmitting is less than 100 mA. One alarm/restore cycle with the maximum payload size results in approximately a 23mA increase in the average current.EE1941XSAssuming check-in messages every 12 minutes and infrequent alarm messages (one per day, on average), the average current draw is 15 uA. Peak current draw while transmitting is less than 50 mA. One alarm/restore cycle with the maximum payload size results in approximately a 12mA increase in the average current.6.3 Low Battery ConditionThe E*1941XS measures power supply voltage every three and a half hours, and, when the voltage measures 2.4 volts, a serial message is sent indicating a low battery condition.6.4 Temperature range-20°C to +60°C, non-condensing6.5 RF network compatibilityEchoStream Commercial Mesh Network6.6 Payload size50 bytes maximum6.7 Input RequirementsCaution: Input levels must not exceed 3.3 V.Open When an active source (open collector or dry contact) is used to drive the alarm or tamper input, the voltage should be between 0.75xVcc and Vcc. A passive input should have an impedance of greater than 5.1k ohm between the input and ground. Closed When an active source is used, the voltage should be less than 0.25xVcc. A passive input should have an impedance of less than 240 ohm.6.8 Serial I/O - UART logic-levelsInput levels must not exceed 3.3 V. Output levels are limited to 3.3 V, maximum. Data in pins Vih (minimum high level input voltage): 0.75xVccData in pins Vil (maximum low level input voltage): 0.25xVccData out pins Voh (minimum high level output voltage): Vcc - 0.25 at Ioh: -1.5mA Data out pins Voh (minimum high level output voltage): Vcc - 0.6 V at Ioh: -6mAData out pins Vol (maximum low level output voltage): 0.25 V at Iol: 1.5mAData out pins Vol (maximum low level output voltage): 0.6 V at Iol: 6 mA7 Compliance Requirements7.1 FCC Requirements for the EN1941XSThe EN1941XS one-way serial data RF module has received a Limited Modular Grant, requiring Inovonics to retain control of the final installation to ensure compliance to FCC/IC regulations. The integrator is responsible to test the final installation to verify compliance to FCC/IC regulation for unintentional emissions. Prior to marketing the product, the integrator must complete and submit to Inovonics a compliance review form and documentation, and, if requested, a functional product sample for approval. If this is not possible, the integrator must perform the testing themselves and submit proof to Inovonics of compliance to Part 15 of the FCC Rules and Industry Canada RSS-210.At the end of this guide is an Inovonics compliance review form to be filled out by the integrator.The integrator is also responsible for properly labeling the product containing the one-way serial data RF module. Labels must be placed on the outside of the product, and must include a statement indicating that the product contains the module, along with the FCC and IC number.Example 1 “Contains One-Way Serial RF ModuleFCC ID: HCQ3B6OT9OEM; IC ID: 2309A-OT9OEM”Example 2 “Contains FCC ID: HCQ3B6OT9OEM; IC ID: 2309A-OT9OEM”7.2 Television and Radio InterferenceThis equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates, uses and can radiate radio frequency energy and, if not installed and used in accordance with the instructions, may cause harmful interference to radio communications. However, there is no guarantee that interference will not occur in a particular installation. If this equipment does cause harmful interference to radio or television reception, which can be determined by turning the equipment off and on, the user is encouraged to try to correct the interference by one or more of the following measures:•Reorient or relocate the receiving antenna.•Increase the separation between the equipment and receiver.•Connect the equipment into an outlet on a circuit different from that to which the receiver is connected.•Consult the dealer or an experienced radio/TV technician for help.8 FCC Part 15 and Industry Canada Compliance This device complies with part 15 of the FCC Rules and Industry Canada license-exempt RSS standard(s). Operation is subject to the following two conditions: (1) this device may not cause interference, and (2) this device must accept any interference, including interference that may cause undesired operation of the device.Le présent appareil est conforme aux CNR d'Industrie Canada applicables aux appareils radio exempts de licence. L'exploitation est autorisée aux deux conditions suivantes : (1) l'appareil ne doit pas produire de brouillage, et (2) l'utilisateur del'appareil doit accepter tout brouillage radioélectrique subi, même si le brouillage est susceptible d'en compromettre le fonctionnement.Connection Output Jumper N/C Primary AlarmOpen AlarmGround Alarm ClearSecondary Alarm Open Alarm Ground Alarm ClearTamperOpen TamperGround Tamper ClearReset Open for normal operation; connect to the ground and release for a board reset.End user application printed circuit board RF moduleClear transmit region in front and back of antenna8.1 CE Label Requirements for EE1941XSInovonics Wireless has received European Telecommunications Standards Institute approval to market one-way serial data RF modules, and they are manufactured to be RoHS compliant. The integrator is responsible for properly labeling the product containing the one-way serial data RF module. Labels must be placed on the outside of the product, and must include the CE logo.9 Warranty and DisclaimerNote: Changes or modifications not expressly approved by the party responsible for compliance could void the user's authority to operate the equipment.Inovonics Wireless Corporation ("Inovonics") warrants its EchoStream products ("Product" or "Products") to conform to its own specifications and to be free of defects in materials and workmanship under normal use for a period of thirty-six (36) months from the date of manufacture. Within the warranty period, Inovonics will repair or replace, at its option, all or any part of the warranted Product. Inovonics will not be responsible for dismantling and/or reinstallation charges. To exercise the warranty, the User ("User", "Installer" or "Consumer") must work directly through their authorized distributor who will be given a Return Material Authorization ("RMA") number by Inovonics. Details of shipment will be arranged directly through the authorized distributor.This warranty is void in cases of improper installation, misuse, failure to follow installation and operating instructions, alteration, accident or tampering, and repair by anyone other than Inovonics.This warranty is exclusive and expressly in lieu of all other warranties, obligations or liabilities, whether written, oral, express, or implied. There is no warranty by Inovonics that Inovonics product will be merchantable or fit for any particular purpose, nor is there any other warranty, expressed or implied, except as such is expressly set forth herein. In no event shall Inovonics be liable for an incidental, consequential, indirect, special, or exemplary damages, including but not limited to loss of profit, revenue, or contract, loss of use, cost of down time, or interruption of business, nor any claim made by distributor's customers or any other person or entity.This warranty will not be modified or extended. Inovonics does not authorize any person to act on its behalf to modify or extend this warranty.This warranty will apply only to Inovonics Products. Inovonics will not be liable for any direct, incidental, or consequential damage or loss whatsoever, caused by the malfunction of Product due to products, accessories, or attachments of other manufacturers, including batteries, used in conjunction with Inovonics Products.Inovonics One-Way Serial RF Module Compliance Review FormPlease provide the following information for review of final installation toensure compliance with FCC/IC regulations:Required materials from integratorThe following must also be attached for review with this form:• A description of the final installation, with attached photographs, asnecessary•The unintentional radiator test report indicating compliance Integrator informationFirst name:Last name:Phone number:Email address:Address:Declaration of conformity to Inovonics’ installation instructions:Submitted materials:Authorized signature:Submission date:Inovonics contact informationInovonicsATTN: Product Management315 CTC Blvd.Louisville, CO 80027Phone: 303.939.9336Toll-Free: 800.782.2709Fax: 303.939.8977*****************************Required materials from Inovonics•The record of product sample review and test, as necessary Inovonics approvalFirst name:Last name:Phone number:Email address:Approval status (pass, fail, samples required, compliance testing required, compliance test report required):Approval comments:Submitted materials:Returned materials:Authorized signature:Approval date:。
三菱PLC联机操作手册

目录
1 概述...................................................................... 1
位元选择参数64496496内容符号名称6449r2924控制器过热报警有效保留保持累加计时器保持plc计数器程序有效plc计时器程序有效6450r2924外部报警信息显示报警操作信息转换信息全屏幕显示操作信息有效报警信息有效6451r2925有效plc开发环境选择联机编辑不可联机操作方式有效6452r2925计数器固定的保持累加计时器固定的保持6453r29266454r29266455r29276456r29276457r29286458r29286459r29296460r29296461r29306462r29306463r29316464r2931备用高速输入规格备用高速输出规格备用高速输出规格系统配置24系统选择符号名称6465r29326466r29326467r29336468r29336469r2934nc报警信号6470r29346471r29356472r29356473r29366474r29366475r29376476r29376477r29386478r29386479r29396480r2939标准plc参数6496保留作为公司系统调试用
–2–
2. 系统配置 2.2 通用配置
2.2 通用配置
在进行联机操作开发时,系统的配置如下所示:
梯形图编辑、梯形图监控以及 PLC 运行/终止,等等。
通过个人计算机可进行新的开发。
数控机床RS232通讯接口及参数介绍

数控机床RS232通讯接口及参数介绍RS-232-C接口在数控机床上有9针或25针串口,其特点是简单,用一根RS232C电缆和电脑进行连接,实现在计算机和数控机床之间进行系统参数、PMC 参数、螺距补偿参数、加工程序、刀补等数据传输,完成数据备份和数据恢复,以及DNC加工和诊断维修。
一、RS-232-C简介RS-232-C接口(又称 EIA RS-232-C)在各种现代化自动控制装置上应用十分广泛,是目前最常用的一种串行通讯接口。
它是在1970年由美国电子工业协会(EIA)联合贝尔系统、调制解调器厂家及计算机终端生产厂家共同制定的用于串行通讯的标准。
它的全名是“据终端设备(DTE)和数据通讯设备(DCE)之间串行二进制数据交换接口技术标准”,该标准规定采用一个25个脚的DB25连接器,对连接器的每个引脚的信号内容加以规定,还对各种信号的电平加以规定,一般只使用3~9根引线。
1、RS232C接口连接器引脚分配及定义DB-25和DB-9型插头座针脚功能如下:DB-9串行口的针脚功能 DB-25串行口的针脚功能针脚符号信号名称针脚符号信号名称1 DCD 载波检测8 DCD 载波检测2 RXD 接受数据3 RXD 接受数据3 TXD 发送数据 2 TXD 发出数据4 DTR 数据终端准备好20 DTR 数据终端准备好5 SG 信号地7 SG 信号地6 DSR 数据准备好 6 DSR 数据准备好7 RTS 请求发送 4 RTS 请求发送8 CTS 清除发送 5 CTS 清除发送9 RI 振铃指示22 RI 振铃指示DB-25插头外形DB-9插头外形2、端口参数和设置串口通信最重要的参数是波特率、数据位、停止位、奇偶校验和流控制。
对于两个进行通行的端口,这些参数必须相同:2.1 波特率:这是一个衡量通信速度的参数。
它表示每秒钟传送的bit的个数。
例如300波特表示每秒钟发送300个bit。
当我们提到时钟周期时,我们就是指波特率,例如如果协议需要4800波特率,那么时钟是4800Hz。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
附录 1.1 数控系统(DASEN-3i)外形图…………………………………………………… 63 附录 1.2 基本 I/O 单元(R2J-11/12)外形图……………………………………………… 65 附录 1.3 远程 I/O 单元(R2J-DX1□□)外形图………………………………………………… 66
附录 2.13 C32-1 电缆………………………………………………………………………… 74 附录 2.14 ENC-SP1/ENC-SP2 电缆……………………………………………………………… 76 附录 2.15 C14 电缆………………………………………………………………………… 77 附录 2.16 扩展 I/O 扁平电缆……………………………………………………………… 78 附录 2.17 R2J-C40 电缆…………………………………………………………………… 78
6.2 远程 I/O 单元的各部名称………………………………………………………………… 46
6.3 远程 I/O 电源的连接……………………………………………………………………… 47
6.4 数字信号输入电路的概要………………………………………………………………… 48
6.5 数字信号输出电路的概要………………………………………………………………… 50
危险 本说明书中没有关于‘危险’的项目。
警告 1.防止触电的警告事项
请不要用湿手操作开关,否则可能导致触电事故。 请不要弯折损坏电缆,施加压力,放置重物,否则可能导致触电事故。
注意 1.关于噪声方面的注意事项
本说明书所示的屏蔽电缆,请一定进行如使用电缆夹子等接地处理。
配线时,请将信号线同动力线/电力线分开。
6.6 模拟信号输出电路的概要………………………………………………………………… 51
6.7 模拟信号输入电路的概要………………………………………………………………… 51
6.8 R2J-DX10□/DX14□单元与机械控制信号的连接…………………………………………… 52
6.9 R2J-DX11□单元与机械控制信号的连接…………………………………………………… 55
2.1 系统构成……………………………………………………………………………… 2 2.2 构成单元一览表………………………………………………………………………… 3
第 3 章 设置……………………………………………………………………………… 5
3.1 一般规格……………………………………………………………………………… 5
3 个级别。
危险
如果进行了错误操作,一定会对使用者造成死亡或重伤等危害的情况下采用 危险提示
警告 注意
如果进行了错误操作,可能会对使用者造成死亡或重伤等危害的情况下采用 警告提示
如果进行了错误操作,可能会对使用者造成伤害或损坏机床的情况下采用注意提示
由于具体状况不同,甚至 注意 提示也可能导致严重后果,请务必遵守本说明书记载的内容。
4.2.1 控制单元的连接系统图……………………………………………………………… 16 4.2.2 控制单元的插头配置图……………………………………………………………… 17 4.2.3 控制单元的插头管脚分布…………………………………………………………… 18 4.2.4 RS-232C 电缆的连接……………………………………………………………… 22 4.2.5 手动脉冲发生器的连接……………………………………………………………… 22 4.2.6 操作面板 I/O 的连接………………………………………………………………… 23 4.2.7 非常停止信号(EMG)的连接 ………………………………………………………… 23 4.3 显示单元的连接………………………………………………………………………… 25 4.3.1 CRT 的连接………………………………………………………………………… 25 4.3.2 LCD 的连接…………………………………………………………………………… 25 4.4 电源的连接……………………………………………………………………………… 26 使用通用稳压电源………………………………………………………………………… 26
附录 3. EMC 安装介绍…………………………………………………………………… 79
附录 3.1 前言………………………………………………………………………………… 79
附录 3.2 关于 EMC 指令……………………………………………………………………… 79
附录 3.3 EMC 对策的方法……………………………………………………………………… 80
3.3.1 机架接地(FG) ………………………………………………………………………… 9
3.3.2 电缆的屏蔽箝制金属夹……………………………………………………………… 11
3.3.3 连接瞬间放电断路器………………………………Байду номын сангаас……………………………… 12
3.3.4 关于雷击浪涌的保护对策………………………………………………………………
DASEN-3i
连接手册
请仔细阅读本手册,并作为后续参考
大森数控
安全注意事项
为了正确使用系统,在系统安装,运行,编程,维修,检查之前,一定要熟读机床厂家提供的规格说明,本
用户手册,相关说明书及附加文件。
在使用之前,请熟练掌握本数控装置的全部知识,安全注意事项及警告。
本说明书将安全注意事项划分为 危险 , 警告 , 注意
第 5 章 连接 I/O 接口………………………………………………………………… 27
5.1 I/O 接口概略……………………………………………………………………………
2
7
5.1.1 I/O 接口的种类……………………………………………………………………… 27
5.1.2 I/O 单元的连接举例………………………………………………………………… 27
附录 3.4 关于电柜的结构…………………………………………………………………… 80
附录 3.4.1 控制电柜本体的对策………………………………………………………………
1
3
3.4 安装………………………………………………………………………………………
1
4
第 4 章 设备间的连接………………………………………………………………… 15
4.1 系统结构总图…………………………………………………………………………… 15 4.2 控制单元的连接………………………………………………………………………… 16
5.1.3 I/O 单元的通道号设定……………………………………………………………… 27
5.2 基本 I/O 单元的连接………………………………………………………………………
2
8
5.2.1 基本 I/O 单元的连接系统图…………………………………………………………… 28
5.2.2 基本 I/O 单元的插头配置图…………………………………………………………… 29
3.2 操作箱的设计条件……………………………………………………………………… 7
3.2.1 操作箱的外形轮廓及尺寸……………………………………………………………… 7
3.2.2 操作箱的散热对策…………………………………………………………………… 8
3.3 噪音对策………………………………………………………………………………… 9
注意 2.安装方面的注意事项
请在非易燃材料上安装控制单元或操作面板。若直接或就近在易燃材料上安装可能会引起火灾。 请务必严守安装的方向。 请不要安装,运行已经损坏或缺少部件的控制单元,操作面板。 请不要将螺钉,金属屑等导电物质或油等易燃物质混入控制单元,操作面板。 控制单元,操作面板都为精密设备,请注意防止碰摔,强力冲撞。 请不要将操作面板安装在有冷却液的位置。
3.连接方面的注意事项 请不要接入本说明书所示以外的电压,否则会导致设备损坏或出现事故。 由于不正当的连接会损坏设备,请将电缆按指定插头进行连接。 使用象继电器这样的感性负载时,请在负载上并联一个二极管以抑制噪音。 使用象灯泡这样的容性负载时,请一定在负载上串联一个保护电阻以限制负载电流。 在通电状态下,请不要拔插各单元间的连接电缆。 在通电状态下,请不要拔插各线路板。 使用外围设备时、请一定注意 RS-232C 连接线的拔插方法。 设备一侧的 AC 电源开关一定要选用双向型开关,务必确认设备一侧的 AC 电源开关在 OFF 的状态 下拔插连接线。
6.10 R2J-DX12□单元与机械控制信号的连接………………………………………………… 58
6.11 R2J-DX14□单元与模拟输入输出信号的连接……………………………………………… 61
6.12 使用多台远程 I/O 单元的通道号设定………………………………………………………
6
2
附录 1. 外形图…………………………………………………………………………… 63
5.2.3 基本 I/O 单元的插头管脚分布………………………………………………………… 30
5.2.4 数字信号输入电路的概要…………………………………………………………… 35
5.2.5 数字电路输出电路的概要…………………………………………………………… 37
5.2.6 机械控制信号的连接………………………………………………………………… 38
5.2.11 跳跃信号的连接…………………………………………………………………… 43
5.2.12 远程 I/O 单元的连接………………………………………………………………… 44
第 6 章 远程 I/O 的连接……………………………………………………………… 45