控制系统中的模糊Petri网建模与仿真
故障诊断系统的模糊Petri网建模方法

故障诊断系统的模糊Petri网建模方法随着自动化和智能化技术的发展,故障诊断系统在工业领域的应用越来越广泛。
故障诊断系统可以快速准确地检测和识别设备或系统中的故障,提高设备的可靠性和稳定性。
而为了更好地对故障进行诊断,建立一个准确可靠的故障诊断模型是非常关键的。
模糊Petri网是一种将模糊逻辑理论与Petri网模型相结合的新型模型,它可以有效地描述复杂系统中的不确定性和模糊性。
模糊Petri网将模糊集合引入到Petri网中的状态和标识中,从而能够处理模糊状态和模糊规则。
因此,利用模糊Petri网建模方法对故障诊断系统进行建模是非常合适的。
1. 系统建模在使用模糊Petri网建模故障诊断系统之前,首先需要对系统进行建模。
建模的目的是对系统的组成部分以及它们之间的相互作用进行描述。
故障诊断系统通常由传感器、信号处理单元、故障诊断器等部分组成。
2. 定义状态集合根据故障诊断系统的特性,我们需要定义状态集合。
状态集合描述了系统的工作状态,包括正常工作状态和故障状态。
在模糊Petri网建模中,可以使用模糊集合来描述各个状态。
3. 确定变迁集合变迁是系统中状态的转变过程,它表示系统发生了某种事件或动作。
在故障诊断系统中,变迁可以代表传感器的读数、信号处理的结果等。
根据故障诊断的需要,通过分析系统的工作原理和数据流,确定变迁集合。
4. 定义规则集合为了进行故障诊断,需要根据已知的故障模式和经验知识建立一组规则。
在模糊Petri网建模中,规则集合可以用模糊规则来表示。
模糊规则由模糊条件和模糊输出组成,其中模糊条件是一组输入变量和它们的模糊集合,模糊输出是对输出变量及其模糊集合的描述。
根据故障诊断系统的具体要求,定义一组相应的模糊规则。
5. 构建模糊Petri网模型在上述步骤完成后,可以根据故障诊断系统的要求,构建模糊Petri网模型。
模型可以通过各个组成部分之间的连接关系和转变规则来描述故障诊断系统的工作过程。
模糊故障Petri网建模方法及其应用
Modeling method of fuzzy fault Petri nets and its application
HUANG Min, LIN Xiao, HOU Zhiwen
(College of Computer and Communication Engineering, Changsha University of Science and Technology, Changsha 410014, China) Abstract: In order to overcome the shortcomings of simulating fault spreading, diagnosis and reasoning in fuzzy Petri nets and fault Petri nets, the concept and modeling method of fuzzy fault Petri nets ware put forward. The transition rules and consequences were defined from four types, i.e, one cause and one effect, one cause and several effects, several causes and one effect, competition pattern, to simulate the dynamic running process and reflect the inherent characteristics of the fault spreading. By applying the modeling method of fuzzy fault Petri nets in fault reasoning and diagnosis, the thought of combining the forward reasoning and backward reasoning was proposed, and corresponding algorithm was given. This method was verified by the example of insufficient pressure of hydraulic system. The results show that the forward reasoning can simulate the process of fault spreading, and backward reasoning can carry out fuzzy reasoning perfectly, and so the method is practical. Key words: fuzzy fault Petri nets; forward reasoning; backward reasoning
Petri网建模和Flexsim仿真
Petri网建模及Flexsim仿真摘要:自Petri网创建以来,便以其简单、直观、层次清晰深受用户青睐。
随着Petri网的发展,Petri网技术现已在建模领域得到广泛的应用。
本文首先简单介绍了Petri网及其经典模型架构;然后将Petri网应用于实际系统,对系统进行建模与分析;最后应用Flexsim对系统进行仿真。
关键字:Petri网;Petri经典模型;Petri网运行规则;Petri网建模;Flexsim仿真1.Petri网概述Petri网是对离散并行系统的数学表示。
Petri网是20世纪60年代由卡尔·A·佩特里发明的,适合于描述异步的、并发的计算机系统模型。
Petri网既有严格的数学表述方式,也有直观的图形表达方式,既有丰富的系统描述手段和系统行为分析技术,又为计算机科学提供坚实的概念基础。
多年来Petri网的理论日臻完善,己发展成为具有严密的数学基础,多种抽象层次的通用网论。
Petri网的应用涉及各个领域,特别适用于模拟这样的一类系统,即系统中含有相互作用的并行分支。
由于Petri网对带有并发性、异步性、分布式、非确定性、并行性系统的有力描述,已成为目前最有前途的建模工具。
2.Petri网的经典模型一个Petri网的结构元素包括:库所(place)、变迁(translation)和有向弧(arc)。
库所使用圆来标识,用于描述可能的系统局部状态。
变迁使用矩形标识,用于描述修改系统状态的事件。
有向弧可以从库所节点指向变迁节点,或者从变迁节点指向库所节点。
通过有向弧描述库所和变迁之间的联系,等价于自动机中的状态转移函数,表示使事件发生的局部状态(因)或事件发生所引起的局部状态的变化(果)。
在Petri网模型中,系统的动态特性用令牌(token)标识,令牌表示为包含在库所节点中的圆点,它反映着库所代表的局部状态实现的动态情况。
若某库所中包含一个令牌,则表示库所代表的局部状态的一次实现(条件或结果为真);若库所中无令牌,则表示库所代表的局部状态尚未实现(条件或结果为假)。
petri物流系统建模与仿真
• 2. 车间开始加工工件;
• b. 工件到达并等待加工;
• 3. 工件的加工完成;
• c. 车间正在加工工件;
•前4.提把条加件工好:的事工件件发送生出去需。要成立
• d. 工件加工完毕。
的条件;
事件
前提条件
后继条件
•后继条件:事件发生引起前提
1 2
无 a、b
b c
条件消失,并产生一些其它条件
3
c
的顺序的。
(五)仿真结果分析
一次仿真的结果,只能是系统性能的一次抽 样分析,不能完全代表系统“真正”的性能。 这就要求通过多次观察随机变量,用统计方 法对输出结果进行分析。
若t在M下有效,则M授权t发生。发生后,M变成如
下定义的新标识M’
当一个变迁发生后, 从每一个输入库所中移出 与输入弧权数相等的标记 数(令牌数),在每一个 输出库所中产生与输出弧 权数相等的标记数。
•二、仿真模型
•(二) Petri 网模型 (4) Petri网事件逻辑关 系
① 顺序关系
② 并发关系
集,T为变迁集,F为流关系(一个P元素和一个T元素之间的有向弧组
成的集合)。(低级PN为五元组 )
标识mi:库所内的标记(令 牌)数≥1(基本Petri网=1
)
权重wi:资源的消耗量或生 产量≥1 (基本Petri网=1 )
•二、仿真模型
•(二) Petri 网模型
② 定义2
设
,令
分别称为变迁t的输入库所集(或t的前集)和t的输出库所集
(4)活动:两个相邻发生的事件之间的过程称为活动,它标志
着系统状态的转移。
(5)进程:若干事件与若干活动组成的过程称为进程,它描述
模糊控制系统的建模与仿真设计方法

模糊控制系统的建模与仿真设计方法摘要:模糊控制系统是一种基于模糊逻辑的控制方法,广泛应用于工业控制、自动驾驶等领域。
本文介绍了模糊控制系统的基本原理,详细讨论了建模与仿真设计的方法,包括输入输出的模糊集合划分、规则库的构建、模糊推理与输出解模糊等关键步骤,并通过实例分析验证了方法的有效性。
1. 引言模糊控制系统是一种使用模糊逻辑进行决策和控制的方法,相较于传统的精确控制方法,具有更强的适应性和鲁棒性。
在实际应用中,模糊控制系统已被广泛运用于工业控制、自动驾驶等各个领域。
为了设计高性能的模糊控制系统,合理的建模与仿真设计方法至关重要。
2. 模糊控制系统的建模建模是模糊控制系统设计的第一步,其目的是将实际控制问题转化为模糊集合及其规则库的形式,方便进行模糊推理。
模糊控制系统的建模过程一般包括以下几个步骤:2.1 输入输出模糊集合划分对于待控制的对象,需要对输入和输出的变量进行模糊化,即将实际输入输出的连续取值划分为若干个模糊集合。
划分过程可以基于专家知识或实际数据,常用的划分方法包括三角法、梯形法和高斯法等。
2.2 规则库的构建规则库是模糊控制系统的核心,其中包含了模糊控制的知识和经验。
规则库的构建需要依据专家知识或经验,并将其转化为一系列模糊规则的形式。
每条规则一般由若干个模糊集合的条件和一个模糊集合的结论组成。
2.3 模糊推理通过将实际输入值映射到对应的模糊集合上,利用推理方法将输入与规则库中的规则进行匹配,得到模糊输出。
常用的推理方法包括最大值法、加权平均法和模糊积分法等。
2.4 输出解模糊由于模糊输出是一个模糊集合,需要对其进行解模糊得到具体的输出。
常用的解模糊方法包括最大值法、面积平衡法和最大隶属度法等。
3. 模糊控制系统的仿真设计模糊控制系统的仿真设计是为了验证所设计的模糊控制系统在实际情况下的性能。
仿真设计通常包括以下步骤:3.1 系统建模根据实际控制对象的特性,将其建模为数学模型,包括输入与输出的关系、系统的动态特性等。
Petri网在制造系统建模与仿真中的应用_段波
Petri⽹在制造系统建模与仿真中的应⽤_段波Petr i⽹在制造系统建模与仿真中的应⽤3段波1,赵稳庄2,仉树军1(1总参陆航研究所,北京101121;2中国科学院西安光学精密机械研究所,西安710072)摘要:介绍制造系统的概念以及制造系统建模与仿真的⽬的和意义,阐述Petri⽹的内涵,同时引出⾯向对象的Petri⽹的定义。
依据⾯向对象的Petri⽹的理论,给出制造系统的建模过程,最后将统⼀建模语⾔(UML)融⼊到制造系统的建模与仿真中,通过实例进⼀步阐明了Petri⽹在制造系统建模与仿真中的应⽤。
关键词:制造系统;建模与仿真;Petri⽹;⾯向对象中图分类号:TP39117 ⽂献标识码:A ⽂章编号:1671—3133(2008)08—0024—04Petr i nets for m odeli n g of manufactur i n g system sDuan Bo1,Zhao W en2zhuang2,Zhang Shu2jun1(1A r my Aviati on Research I nstitute,Beijing101121,CHN;2Xiπan I nstitute of Op tics and Precisi on Mechanics of CAS,Xiπan710072,CHN)Abstract:I ntr oduced the concep t of manufacturing syste m,and pur pose and meaning of modeling and si mulating.Expounded the connotati on of Petri nets,educing definiti on of object2oriented Petri nets.Recommended the si m ulating course of manufacturing syste m according as the theoretics of object2oriented Petri nets.Illu m inated Petri nets f or modeling of manufacturing syste m s mak2 ing use of instance.Key words:M anufacturing syste m;Modeling and si m ulating;Petri nets;Object2O riented(O2O)0 引⾔制造是⼀种产⽣具有出售优势、由实体和服务所构成的产品的⾏为。
基于可能性Petri网的模糊系统建模与分析方法的开题报告

基于可能性Petri网的模糊系统建模与分析方法的开题报告一、研究背景和意义Petri网是一种重要的离散事件系统建模工具,尤其在自动化、计算机、信息处理等领域中得到了广泛应用。
Petri网具有直观性、形式化和直接性等优点,因此被广泛应用于工业自动化系统、计算机科学、通讯网络、机场控制系统等领域。
近年来,随着模糊数学理论的发展和应用,基于Petri网的模糊系统建模与分析方法得到了广泛关注。
模糊数学理论可以用来刻画具有不确定性的系统,所以在很多实际工程问题中得到广泛应用。
在Petri网中引入模糊隶属度的概念,可以更好地反映实际系统中的模糊性和不确定性,有助于更加准确地描述和分析系统行为。
因此,本研究选取基于可能性Petri网的模糊系统建模与分析方法作为研究内容,旨在实现对Petri网模型中含模糊特性的建模和分析。
二、研究方法和步骤本研究将采用以下方法和步骤:1.阅读相关文献,研究模糊系统建模与分析方法在Petri网中的应用。
2.建立可能性Petri网模型,并引入模糊隶属度的概念。
3.对建立的模型进行系统分析和仿真实验,包括状态转移图、性质验证、并发性分析等。
4.将所建模型应用于具体工程问题中,验证其适用性和有效性。
三、预期研究成果1.研究基于可能性Petri网的模糊系统建模与分析方法,建立模糊Petri网模型。
2.分析和比较不同的模糊隶属度函数在Petri网中的适用性和特点。
3.验证所建模型在特定工程问题中的应用效果。
四、存在问题和研究难点1. Petri网模型的复杂性和难以分析。
2. 模糊隶属度函数的选择和影响。
3. 仿真实验结果的准确性和验证方法的研究。
五、研究计划和安排1. 第一年:a. 阅读相关文献,掌握基本理论和方法;b. 分析不同模糊隶属度函数的优缺点;c. 在MATLAB或其他仿真软件中建立模糊Petri网模型。
2. 第二年:a. 对建立的模型进行性质验证和状态转移图生成;b. 分析模型的并发性;c. 验证所建模型在实际工程问题中的适用性。
建模与仿真(petri网部分)案例分析
建模与仿真(petri网部分)案例分析建模与仿真是一种将现实世界的系统抽象成数学模型,并通过计算机模拟来分析系统行为和性能的方法。
Petri网是一种常用的建模工具,它能够描述并发系统的行为和状态变化。
以下是一个关于银行取款系统的Petri网建模与仿真案例分析: 1. 系统描述:假设有一个银行取款系统,包括一个ATM机和多个用户。
ATM机有两个状态:空闲和忙碌。
用户可以进行取款操作,当ATM机空闲时可以直接进行取款,当ATM机忙碌时需要等待。
2. 建模:首先,我们需要定义Petri网的元素。
在这个案例中,我们有以下元素:- 位置(Place):ATM空闲、ATM忙碌、用户等待队列- 变迁(Transition):用户取款、ATM机空闲、ATM机忙碌、用户离开然后,我们需要定义这些元素之间的关系。
在这个案例中,我们有以下关系:- 用户取款前需要ATM机空闲- 用户取款后ATM机变为忙碌状态- 用户等待队列中有用户时,ATM机空闲时用户可以取款- 用户取款后可以选择离开或继续等待3. 仿真:通过定义好Petri网的元素和关系,我们可以使用仿真工具来模拟系统的行为和性能。
在仿真过程中,我们可以调整系统参数(如用户到达速率、ATM机服务时间等)来观察系统的响应和效果。
例如,我们可以通过仿真来回答以下问题:- 用户平均等待时间是多少?- ATM机的利用率是多少?- 用户离开的平均时间是多少?通过不断调整参数和观察仿真结果,我们可以优化系统设计,提高系统的性能和效率。
总结:建模与仿真是一种重要的系统分析方法,可以帮助我们理解系统的行为和性能。
Petri网是一种常用的建模工具,可以描述并发系统的行为和状态变化。
通过定义Petri网的元素和关系,并使用仿真工具进行模拟,我们可以分析系统的行为和性能,并优化系统设计。
建模与仿真(petri网部分)案例分析饭店服务系统

饭店服务系统是一个典型的实体和事件之间相互作用的系统,可以利用Petri网进行建模与仿真。
在这里,我将简要介绍如何利用Petri网对饭店服务系统进行建模和案例分析:
1. 建立Petri网模型
在建立Petri网模型时,需要考虑系统中的各个组成部分、事件和它们之间的关系。
以下是可能包括的一些要素:
-库所(Place):例如厨房、客房、餐厅等不同的区域或状态。
-变迁(Transition):例如客人到达、点餐、上菜等事件或动作。
-弧线(Arc):表示库所与变迁之间的关系,描述了事件发生时库所中物品的流动。
2. 设计Petri网的变迁规则
对于饭店服务系统,可以定义一些变迁规则,例如:
-当客人到达时,触发点餐事件;
-点餐后,触发厨房开始准备食物;
-食物准备完成后,触发上菜事件;
-客人用餐完毕后,触发结账事件等。
3. 进行仿真和分析
通过设置初始状态、变迁规则和库所之间的关系,可以进行Petri网仿真,观察不同事件的触发顺序和系统的运行情况。
可以分析系统的
瓶颈、效率等指标,进而优化服务流程。
4. 案例分析
在仿真过程中,可以针对不同的场景进行案例分析,比如:
-流程优化:通过调整变迁规则或库所之间的关系,优化服务流程,提高效率。
-容量规划:分析不同库所的容量,避免服务瓶颈。
-应急预案:模拟突发情况下的应对措施,保障服务质量。
通过Petri网的建模与仿真,可以帮助饭店管理者更好地了解系统运行情况,发现问题并提出改进方案,从而提升服务水平和用户体验。
希望以上内容对你有所帮助。
PETRI网建模与仿真技术在制造系统中的应用实验报告
PETRI网建模与仿真技术在制造系统中的应用实验报告专业:学号:姓名:1.PETRI网简介Petri网是由德国的Carl Adam Petri在1962年所写的博士论文(用自动机通信)中提出的,Petri先生在论文中使用网状结构模拟通信系统,研究信息系统及其相互关系的数学模型。
四十多年来Petri网的理论日臻完善,己发展成为具有严密的数学基础,多种抽象层次的通用网论。
Petri网的应用涉及各个领域,特别适用于模拟这样的一类系统,即系统中含有相互作用的并行分支。
由于Petri网对带有并发性、异步性、分布式、非确定性、并行性系统的有力描述,已成为目前最有前途的建模工具。
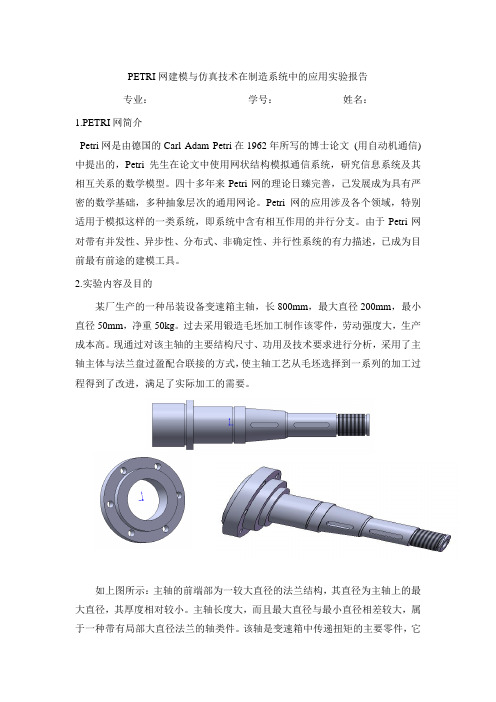
2.实验内容及目的某厂生产的一种吊装设备变速箱主轴,长800mm,最大直径200mm,最小直径50mm,净重50kg。
过去采用锻造毛坯加工制作该零件,劳动强度大,生产成本高。
现通过对该主轴的主要结构尺寸、功用及技术要求进行分析,采用了主轴主体与法兰盘过盈配合联接的方式,使主轴工艺从毛坯选择到一系列的加工过程得到了改进,满足了实际加工的需要。
如上图所示:主轴的前端部为一较大直径的法兰结构,其直径为主轴上的最大直径,其厚度相对较小。
主轴长度大,而且最大直径与最小直径相差较大,属于一种带有局部大直径法兰的轴类件。
该轴是变速箱中传递扭矩的主要零件,它必须具有足够的刚度和强度,有良好的结构形状和形位精度。
主轴材料为45钢,机械加工性能良好。
3.实验过程1)加工工艺过程:根据企业对该产品自身的生产能力要求,并且要满足市场需求综合制定生产计划,考虑到零件尺寸的大小,资金周转、调整费用及仓容量,生产类型为中批生产。
对于中批生产来说,机床设备的可以部分采用流水线布置,部分用专用机床,广泛采用夹具。
最终采用流水线生产,工艺路线以“S”型布置。
根据零件加工要求,工艺路线分为三条如下:(1)主轴主体:备棒料→打中心孔、粗车→钻、扩内孔→精车→检验、作标记;(2)法兰盘:备锻造件→粗车→调质处理→精车→检验、作标记;(3)动力主轴:热装主轴主体与法兰盘→半精车→磨外圆→铣键槽→钻法兰各孔→精车外螺纹→精磨各外圆及锥面→检验、入库。
建模与仿真(petri网部分)

► ◄
▲
P1
t1
P2
t2
P3
P4
t3
P5
t4
P6
死锁关系
► ◄
▲
2 活性 • 在系统中用于检测是否存在死锁。一个系统 存在的一个潜在问题是死锁,为了避免死锁, 系统的Petri网模型必须具有活性。 • (1)互斥:同时争夺唯一资源 • (2)占用且等待 • (3)无抢占 • (4)循环等待
► ◄
► ◄
▲
其中,“▕ ”表示变迁,t1~t16为系统中的变迁 “◯ ”表示普通库所,p0~p20为普通库所
“◎ ”表示决策库所,pd0~pd7为决策库所
► ◄
▲
► ◄
▲
► ◄
▲
► ◄
▲
案例3 Petri网的应用案例
Petri网是一种图形演绎方法,应用Petri网分析系 统故障就是将系统所不希望发生的事件作为顶库所, 逐步找出导致这一事件的所有可能因素作为中间库 所和底库所。故障树可以看作是系统中故障传播的 逻辑关系,一般的单调关联故障树只含有与门和或 门。故障树可以很方便地用 Petri 网表示,如与门采 用多输入变迁代替,或门采用两个变迁代替。
► ◄
▲
用简单图形较好的表示并发、同步、因果等关系。 以网图的方式简洁、直观的模拟离散事件系统 目前已得到广泛应用,有限状态机、通信协议、同 步控制、生产系统、形式语言、多处理器系统等建 模中
► ◄
▲
二、Petri网基本概念
Petri网是一种网状信息流模型,包括条件和事件两 类节点,在条件和事件为节点的有向二分图基础上 添加表示状态信息的托肯(token)分布,并按引发 规则使得事件驱动状态演变,从而反映系统动态运 行过程。 通常情况下,用小矩形表示事件(称作变迁) 结点,用小圆形表示条件(称作位置)结点,变迁 结点之间、位置结点之间不能有有向弧,变迁结点 与位置节点之间连接有向弧,由此构成的有向二分 图称作网。网的某些位置结点中标上若干黑点 (token),从而构成Petri网。 ► ◄
建模与仿真(petri网部分)
t1 P1
P2
t2
P4
t3
P5
P3
一个简单的Petri网
Petri网数学定义
▪三元组N=(P,T;F)构成网(net)的充分必要条件:
① P∩T=ф,规定了库所和变迁是两类不同的 元素; ② P∪T≠ф,表示网中至少有一个元素; ③ F=(P×T)∪(T×P),建立了从库所到变迁、 从变迁到库所的单方向联系,并且规定同类元 素之间不能直接联系;
▪ 以变迁激发导致令牌在库所间的流动,Petri网可以用于模拟系 统的动态运行过程,反映系统的动态特性。
▪ 网N=(P,T;F)构成了描述系统静态结构框架,但还不能描 述系统静态结构的全貌。
▪ 网论尊重资源有限的事实。实际上,变迁发生所需的资源是有 限的,库所容量也应是有限的。
▪ 完整的网系统应指明资源的初始分布,规定变迁的活动原则, 确定库所容量和变迁与资源数量之间的关系。
t6 P5
P10 t8
t3
t4
P7
t5
P9
resource state place ,“S” transition event
• 资源:与系统状态变化有关的因素, 如原料、产品、工具、设备等
• 状态元素:资源归类后的抽象 • 库所:一个场所,存放状态元素 • 变迁:资源状态变化 • 事件:引起条件的变迁称为事件 • 容量:库所的最大资源数量
实例1:工业生产线的Petri网模型
• 有一工业生产线,要完成两项操作,分别为 变迁t1和t2表示,变迁t1 将进入生产线的半成 品s1s2用两个部件s3固定在一起,后形成中间
件s4。然后第2个变迁t2 将s4 和s5用3个部件 s3固定在一起形成中间件s6。完成t1和t2 都需
模糊自整定PID控制系统设计与仿真
模糊自整定PID 控制系统设计与仿真 ——俯仰姿态保持模糊PID 控制一、设计内容1、模型与设计要求(1) 某飞机纵向短周期运动状态方程为:X AX BU Y CX=+=。
其中,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=θαq X ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=θαq Y ,[]e U δ=;表示迎角,表示俯仰角速率,表示俯仰角,表示升降舵偏角。
飞机在某状态下的状态参数矩阵为:-0.5698910-2.49155-1.143570010A ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,-0.02932.26830B ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,100010001C ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 使用模糊PID 控制器,设计跟踪俯仰角的俯仰姿态保持闭环飞行控制系统,并对设计结果进行分析,计算俯仰角的超调量和调节时间。
(2)设计模糊控制规则。
(3)在MATLAB 下依据整定原理编写仿真程序并调试。
(4)给定输入为阶跃信号,运行程序,记录仿真数据和曲线。
(5)修改模糊控制规则,重复步骤4。
(6)分析数据和控制曲线。
2.报告要求(1)给出模糊控制器的设计过程和程序清单。
(2)记录仿真数据和曲线。
(3)分析仿真结果。
二、设计过程1.概述模糊PID 控制器有多种结构形式,但是工作原理基本一致,即运用模糊数学的基本原理和方法,把规则的条件、操作用模糊集来表示,把这些模糊控制规则以及相关的信息作为知识存入计算机的知识库中,然后计算机根据系统的实际响应运用模糊推理,可实现对PID 参数的最佳调整。
自适应模糊PID 控制器以误差和误差变化作为输入,可以满足不同时刻的和对PID 参数自整定的要求。
利用模糊控制规则在线对PID 参数进行修改,便构成了自适应模糊PID 控制器,其结构如图1所示。
图1 自适应模糊控制器结构PID 参数模糊自整定是找出PID 三个参数k p 、k i 、k d 与e 和ec 之间的模糊关系,在运行中通过不断检测和,根据模糊控制原理来对3个参数进行在线修改,以满足不同和时对控制参数的不同要求,而使被控对象有良好的动、静态性能。
模糊控制系统的建模与仿真
模糊控制系统的建模与仿真概述:模糊控制系统是一种基于模糊逻辑运算的控制系统,具有较强的适应性和灵活性,由于其能够模拟人类判断思维,因此在实际应用中得到了广泛的应用。
本文主要介绍模糊控制系统的建模方法和仿真过程,并以一个实际的调节系统为例,详细阐述了模糊控制系统建模和仿真的具体步骤和操作过程。
一、模糊控制系统的建模1、模糊控制系统基本结构模糊控制系统主要包括模糊化、规则库、推理机和解模糊化等四个核心部分,基本结构如下图所示:2、模糊化过程模糊化是将输入量从实数域映射到模糊集合中的过程,其目的是将输入量的精确值转化为对应的模糊语言变量。
模糊化的基本方法是将实数值用隶属度函数映射到模糊集合中,然后用一个三元组表示模糊集合,即(集合名称,隶属度函数,隶属度范围)。
3、规则库规则库是模糊控制系统的核心部分,它是由一系列模糊化的输入量和对应的输出变量构成的,每个规则由若干个前提条件和一个结论组成,并用“IF-THEN”规则表示。
4、推理机推理机负责推断和输出决策结果,包括模糊推理和模糊推断两个过程。
其中,模糊推理是根据规则库和输入量计算出所有规则的置信度,然后进行加权平均,得到系统输出的模糊集合;模糊推断是将模糊集合转换为实际输出值。
5、解模糊化解模糊化是将模糊输出结果转换为实际物理控制量的过程,它根据实际控制对象和需求选择合适的解模糊方法,常见的解模糊方法有最大值法、中心平均法、面积平均法等。
二、模糊控制系统的仿真模糊控制系统仿真是指通过计算机模拟模糊控制系统的运行过程,以便测试控制系统的性能和精度,并对系统进行优化和设计。
本文以一个加热器温度控制系统为例,介绍了模糊控制系统仿真的具体步骤和操作过程。
1、系统模型建立在模拟系统的基础上,我们需要了解系统的物理特性和控制特性,以此建立系统模型,并利用SIMULINK等软件实现仿真。
2、变量模糊化根据温度特性曲线及控制器的输出特性曲线等建立输入与输出模糊化函数,从而实现温度与控制器输出变量之间的映射。
模糊PID控制器的设计与仿真——设计步骤(修改)

模糊PID控制器的设计与仿真设计模糊PID控制器时,首先要将精确量转换为模糊量,并且要把转换后的模糊量映射到模糊控制论域当中,这个过程就是精确量模糊化的过程。
模糊化的主要功能就是将输入量精确值转换成为一个模糊变量的值,最终形成一个模糊集合。
本次设计系统的精确量包括以下变量:变化量e ,变化量的变化速率ec 还有参数整定过程中的输出量ΔKP ,ΔKD,ΔKI,在设计模糊PID 的过程中,需要将这些精确量转换成为模糊论域上的模糊值.本系统的误差与误差变化率的模糊论域与基本论域为:E=[—6,-4,—2,0,2,4,6];Ec=[—6,—4,-2,0,2,4,6]。
模糊PID控制器的设计选用二维模糊控制器。
以给定值的偏差e和偏差变化ec为输入;ΔKP ,ΔKD,ΔKI为输出的自适应模糊PID控制器,见图1。
图1模糊PID控制器(1)模糊变量选取输入变量E和EC的模糊化将一定范围(基本论域)的输入变量映射到离散区间(论域)需要先验知识来确定输入变量的范围.就本系统而言,设置语言变量取七个,分别为 NB,NM,NS,ZO,PS,PM,PB。
(2)语言变量及隶属函数根据控制要求,对各个输入,输出变量作如下划定:e,ec论域:{—6,—5,—4,—3,-2,—1,0,1,2,3,4,5,6}ΔKP ,ΔKD,ΔKI论域:{—6,-5,—4,—3,—2,—1,0,1,2,3,4,5,6}应用模糊合成推理PID参数的整定算法。
第k个采样时间的整定为).()(,)()(,)()(kKKkKkKKkKkKKkKDDDIIIPPP∆+=∆+=∆+=式中,,DIPKKK为经典PID控制器的初始参数。
设置输入变量隶属度函数如图2所示,输出变量隶属度函数如图3所示。
图2 输入变量隶属度函图3 输出变量隶属度函(3)编辑模糊规则库根据以上各输出参数的模糊规则表,可以归纳出49条控制逻辑规则,具体的控制规则如下所示:1.If (e is NB) and (ec is NB)then (kp is NB)(ki is PB)(kd is NS)(1)2.If (e is NB) and (ec is NM)then (kp is NB)(ki is PB)(kd is PS)(1)3.If (e is NB) and (ec is NS) then (kp is NM)(ki is PM)(kd is PB)(1)4.If (e is NB) and (ec is ZO) then (kp is NM)(ki is PM)(kd is PB)(1)5.If (e is NB)and (ec is PS) then (kp is NS)(ki is PS)(kd is PB)(1)6.If (e is NB)and (ec is PM) then (kp is ZO)(ki is ZO)(kd is PM)(1)7.If (e is NB)and (ec is PB)then (kp is ZO)(ki is ZO)(kd is NS)(1)8.If (e is NM)and (ec is NB)then (kp is NB)(ki is PB)(kd is NS)(1)9.If (e is NM)and (ec is NM)then (kp is NB)(ki is PB)(kd is PS)(1)10.If (e is NM) and (ec is NS) then (kp is NM)(ki is PM)(kd is PB)(1)11.If (e is NM)and (ec is ZO)then (kp is NS)(ki is PS)(kd is PM)(1)12.If (e is NM) and (ec is PS) then (kp is NS)(ki is PS)(kd is PM)(1)13.If (e is NM) and (ec is PM)then (kp is ZO)(ki is ZO)(kd is PS)(1)14.If (e is NM) and (ec is PB)then (kp is PS)(ki is ZO)(kd is ZO)(1)15.If (e is NS) and (ec is NB)then (kp is NM)(ki is PB)(kd is ZO)(1)16.If (e is NS)and (ec is NM)then (kp is NM)(ki is PM)(kd is PS)(1)17.If (e is NS) and (ec is NS) then (kp is NM)(ki is PS)(kd is PM)(1)18.If (e is NS)and (ec is ZO) then (kp is NS)(ki is PS)(kd is PM)(1)19.If (e is NS)and (ec is PS)then (kp is ZO)(ki is ZO)(kd is PS)(1)20.If (e is NS)and (ec is PM)then (kp is PS)(ki is NS)(kd is PS)(1)21.If (e is NS) and (ec is PB) then (kp is PS)(ki is NS)(kd is ZO)(1)22.If (e is ZO)and (ec is NB)then (kp is NM)(ki is PM)(kd is ZO)(1)23.If (e is ZO)and (ec is NM) then (kp is NM)(ki is PM)(kd is PS)(1)24.If (e is ZO) and (ec is NS)then (kp is NS)(ki is PS)(kd is PS)(1)25.If (e is ZO)and (ec is ZO)then (kp is ZO)(ki is ZO)(kd is PS)(1)26.If (e is ZO) and (ec is PS) then (kp is PS)(ki is NS)(kd is PS)(1)27.If (e is ZO)and (ec is PM) then (kp is PM)(ki is NM)(kd is PS)(1)28.If (e is ZO)and (ec is PB)then (kp is PM)(ki is NM)(kd is ZO)(1)29.If (e is PS) and (ec is NB)then (kp is NS)(ki is PM)(kd is ZO)(1)30.If (e is PS) and (ec is NM) then (kp is NS)(ki is PS)(kd is ZO)(1)31.If (e is PS)and (ec is NS)then (kp is ZO)(ki is ZO)(kd is ZO)(1)32.If (e is PS) and (ec is ZO) then (kp is PS)(ki is NS)(kd is ZO)(1)33.If (e is PS) and (ec is PS) then (kp is PS)(ki is NS)(kd is ZO)(1)34.If (e is PS) and (ec is PM)then (kp is PM)(ki is NM)(kd is ZO)(1)35.If (e is PS) and (ec is PB)then (kp is PM)(ki is NB)(kd is ZO)(1)36.If (e is PM)and (ec is NB)then (kp is NS)(ki is ZO)(kd is NB)(1)37.If (e is PM)and (ec is NM) then (kp is ZO)(ki is ZO)(kd is PS)(1)38.If (e is PM)and (ec is NS) then (kp is PS)(ki is NS)(kd is NS)(1)39.If (e is PM) and (ec is ZO)then (kp is PM)(ki is NS)(kd is NS)(1)40.If (e is PM)and (ec is PS) then (kp is PM)(ki is NM)(kd is NS)(1)41.If (e is PM)and (ec is PM) then (kp is PM)(ki is NB)(kd is NS)(1)42.If (e is PM) and (ec is PB)then (kp is PB)(ki is NB)(kd is NB)(1)43.If (e is PB)and (ec is NB) then (kp is ZO)(ki is ZO)(kd is NB)(1)44.If (e is PB)and (ec is NM) then (kp is ZO)(ki is ZO)(kd is NM)(1)45.If (e is PB)and (ec is NS) then (kp is PM)(ki is NS)(kd is NM)(1)46.If (e is PB) and (ec is ZO) then (kp is PM)(ki is NM)(kd is NM)(1)47.If (e is PB) and (ec is PS) then (kp is PM)(ki is NM)(kd is NS)(1)48.If (e is PB) and (ec is PM)then (kp is PB)(ki is NB)(kd is NS)(1)49.If (e is PB) and (ec is PB)then (kp is PB)(ki is NB)(kd is NB)(1)把这49条控制逻辑规则,键入到模糊规则库中,如图4.图4 模糊规则库(5)模糊PID 控制器仿真利用MATLAB 软件中的Simulink 仿真环境,可以对模糊PID 控制器系统进行模拟仿真实验,来检验设计是否达到要求。
模糊PID控制器的设计与仿真——设计步骤

模糊PID控制器的设计与仿真——设计步骤1.确定控制目标和系统模型:首先确定需要控制的目标,并建立系统模型。
系统模型可以是实际系统的数学模型,也可以是通过实验和观测得到的经验模型。
2.设计模糊控制器的输入和输出变量:根据系统模型和控制目标,确定模糊控制器的输入和输出变量。
输入变量通常是系统误差和误差变化率,输出变量是控制信号。
3.设计模糊控制器的模糊集合:为每个输入和输出变量定义模糊集合。
模糊集合可以是三角形、梯形或高斯分布等形状,根据实际情况选择最合适的形状。
4.设计模糊控制器的规则库:根据经验和专业知识,设计模糊控制器的规则库。
规则库是一组条件-结论对,规定了在不同情况下如何调整输出变量。
5. 进行仿真实验:使用仿真软件(如MATLAB/Simulink)或自己编写的代码,将设计好的模糊PID控制器与系统模型进行结合,进行仿真实验。
6.优化和调整模糊控制器参数:根据仿真实验的结果,通过优化和调整模糊PID控制器的参数,使系统的性能达到预期要求。
可以使用试验-分析-调整的方法,不断迭代优化直到满意为止。
7.实际系统应用:在仿真实验中验证通过后,将优化调整好的模糊PID控制器应用到实际系统中,进行实际控制。
过程中需要注意安全性和稳定性,随时进行监控和调整。
总结:模糊PID控制器的设计和仿真步骤包括确定控制目标和系统模型,设计模糊控制器的输入和输出变量,设计模糊控制器的模糊集合,设计模糊控制器的规则库,进行仿真实验,优化和调整模糊控制器参数,最后将优化的模糊PID控制器应用到实际系统中。
在整个过程中,需要根据实际情况不断尝试和调整,使模糊PID控制器能够更好地适应它所控制的系统。
自动制造系统的Petri网控制器设计及优化

自动制造系统的Petri网控制器设计及优化自动制造系统的Petri网控制器设计及优化随着自动化制造技术的快速发展,自动制造系统已经广泛应用于各个工业领域。
在自动制造系统中,Petri网作为一种强大的建模工具被广泛应用于工业过程的建模与控制。
本文将重点讨论自动制造系统中Petri网控制器的设计及优化。
首先,我们来简单介绍一下Petri网。
Petri网是由地球物理学家Carl Adam Petri在20世纪60年代提出的一种图形化数学模型,用于描述并发系统的行为。
Petri网由一组有向弧和有标记的节点组成,节点包括两种类型:库所和变迁。
库所表示系统中的状态,变迁表示状态之间的转移。
节点之间的有向弧表示变迁与库所之间的关系。
在自动制造系统中,Petri网可以被用来描述生产过程的各种状态及其之间的关系。
Petri网控制器的设计和优化则是为了使系统能够在安全、高效的状态下运行。
下面我们将详细介绍Petri网控制器的设计及优化的几个关键步骤。
首先是Petri网的建模。
在进行控制器设计之前,需要对自动制造系统进行准确的建模。
这包括识别系统的关键组件、子系统和过程,并将其用Petri网进行表示。
根据系统的实际情况,确定库所和变迁的属性及其之间的关系,并为其分配适当的权重。
接下来是控制目标的确定。
根据自动制造系统的要求和目标,确定控制器需要实现的功能和需求。
这可能包括最大化生产效率、降低能源消耗、增加系统鲁棒性等。
根据这些目标,设计控制器的结构和策略。
然后是控制算法的选择和设计。
根据控制目标和系统的特性,选择合适的控制算法。
这可以是简单的开关规则,也可以是复杂的优化算法。
根据控制算法的选择,设计控制器的结构和参数。
在控制器设计的过程中,还需要进行系统的仿真和调试。
使用Petri网仿真工具对控制器进行模拟和分析,验证其性能和稳定性。
如果发现问题,可以进行参数调整和算法优化,直到满足系统的要求。
最后是控制器的实施和优化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制系统中的模糊Petri网建模与仿真
控制系统的设计与优化一直是工程领域的研究热点之一,而Petri网作为一种形式化、可视化的工具,被广泛应用于系统建模与性能分析。
然而,传统的Petri网模型在处理模糊系统时存在着一定的局限性。
为
了解决这一问题,模糊Petri网被引入到控制系统中,以更好地描述和
分析模糊性。
一、模糊Petri网的引入
模糊Petri网是对传统Petri网进行了扩展,将Petri网中的变迁与库
所的输入输出权重赋予了模糊值。
通过引入模糊逻辑,模糊Petri网能
够更好地描述系统的不确定性和模糊性。
模糊Petri网的建模过程中,
首先需要进行模糊化处理,将具体的定量信息转化为模糊的定性表示。
然后,利用模糊逻辑运算对模糊Petri网进行构建与求解。
二、模糊Petri网的建模步骤
模糊Petri网的建模步骤包括系统建模、规则定义、构造模糊Petri
网和仿真分析等几个关键步骤。
1. 系统建模:首先需要对待研究系统进行准确描述,并将其分解为
库所、变迁和弧。
2. 规则定义:根据系统特性和实际需求,定义系统的运行规则和控
制策略,包括输入输出关系、状态转换规则等。
3. 构造模糊Petri网:根据系统建模和规则定义结果,构造出模糊Petri网的初始状态,并确定库所、变迁的初始权重。
4. 仿真分析:通过模拟不同的输入条件和控制策略,对构造的模糊Petri网进行仿真分析,得到系统的性能指标和输出结果。
三、模糊Petri网的优势与应用
模糊Petri网在控制系统中具有以下优势和应用价值。
1. 描述模糊性:传统的Petri网模型无法准确描述系统的模糊性和不确定性,而模糊Petri网能够通过模糊化处理,更好地体现系统的模糊特性。
2. 系统优化:基于模糊Petri网的建模和仿真分析,可以对系统进行性能优化,找到最优的输入输出关系和控制策略。
3. 效果评估:通过模糊Petri网的仿真分析,可以评估系统在不同条件下的工作效果,为系统的优化和改进提供依据。
4. 应用领域广泛:模糊Petri网在自动化控制、人工智能、智能交通等领域具有广泛的应用前景,为系统建模与优化提供了一种新的形式化工具。
四、模糊Petri网建模与仿真实例
以工业生产中的调度系统为例,利用模糊Petri网对系统进行建模与仿真。
1. 系统建模:将工业生产系统划分为库所和变迁,并建立变迁与库所之间的联系。
2. 规则定义:定义工业生产系统的调度规则,包括任务分配、生产资源调度等。
3. 构造模糊Petri网:根据系统建模和规则定义,构造模糊Petri网的初始状态,并设置初始权重。
4. 仿真分析:通过模拟不同的生产任务和调度策略,对构造的模糊Petri网进行仿真分析,获得系统的性能指标和输出结果。
通过模糊Petri网的建模与仿真,可以对工业生产系统的调度效果进行评估和改进,提高生产效率和资源利用率。
总结:
模糊Petri网作为一种新的形式化工具,在控制系统中的建模与仿真具有重要意义。
通过模糊化处理和模糊逻辑运算,模糊Petri网能够更准确地描述系统的模糊性和不确定性,为系统优化和性能分析提供了一种新的方法。
尽管模糊Petri网在实际应用中仍存在一定问题,但随着研究的深入和技术的发展,相信模糊Petri网将会在控制系统领域发挥更大的作用。