MOTOMAN安川焊接机器人
MOTOMAN -SSF2000机器人使用说明书1
3 安装
3.1 安全栏的设置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
5 基本规格
5.1 基本规格一览表. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1 5.2 机器人各部和动作轴名称 . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2 5.3 机器人安装尺寸. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2 5.4 外形尺寸和最大动作范围 . . . . . . . . . . . . . . . . . . . . . . . . . . 5-3 5.5 最大动作范围的修改 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-4
以记载。
iii
HW0483931
HW0483931
危险
• 操作机器人前,按下 NX100 前门及示教编程器上的急停键,并确认伺服电源被切断。伺服 电源切断后,示教编程器上的伺服通的灯熄灭。 紧急情况下,若不能及时制动 机器人,则可能引发人身伤害或设备损坏事故。
急停键
• 解除急停后再接通伺服电源时,要解除造成急停的事故后再接通伺服电源。 由于误操作造成的机器人动作,可能引发人身伤害事故。
焊接机器人工作站简介
焊接机器人工作站简介首钢莫托曼机器人有限公司(SGM)是专门从事工业机器人及其自动化生产线设计、制造及销售的中日合资公司。
公司成立于1996年8月23日,注册资金700万美元,由首钢总公司(45%)、日本株式会社安川电机(43%)和日本岩谷产业株式会社(12%)共同投资,总部位于北京经济技术开发区。
SGM主营日本安川MOTOMAN系列机器人产品,广泛应用于弧焊、点焊、涂胶、切割、搬运、码垛、喷漆、科研及教学。
安川新推出的洁净机器人和双臂机器人是MOTOMAN机器人的开拓性产品,SGM今后会不断推出更多高性能、高精度、高可靠性的新型MOTOMAN机器人。
SGM的产品遍布汽车、摩托车、家电、烟草、陶瓷、工程机械、矿山机械、物流、铁路机车等诸多行业。
为促进企业发展、提升行业知名度,SGM每年都会参展多个大型行业应用展会,SGM拥有一批优秀的工程设计、项目调试人员,在机器人工作站及各种大中型机器人自动化系统生产线的研发、制造、调试及运行维护等方面具有成熟经验和较高水平,在应用技术上获得了多项国家专利。
SGM在不断发展壮大的过程中不断提高系统设计的精准性,这大大提高了系统设备的使用可靠性。
机器人本体专门为点焊而设计,其上臂内藏点焊用的电缆,气管与水管,它与高性能NX100控制柜及配备6.5”LCD彩色显示触摸屏的示教盒的结合,使MOTOMAN-ES系列机器人极大程度地完善了点焊系统。
NX100可同时协调控制多达36个轴,可以实现机器人6轴+电动点焊钳1轴+行走轴1轴,可四台点焊机器人单元的同时协调动作。
并且,由于控制柜命令的运行数度提高1倍从而缩短了作业周期。
有负载重量为165KG到200KG达到了机械人精度运动的最大承重量。
机器人运用高精度控制算法缩短了命令响应的滞后时间,它是安川独有的“高级机器人动作(ARM)”控制特点之一。
因此,机器人的诡计重复精度可以提高50%。
误差补偿功能(选项)使机器人绝对位置精度提高2到5倍。
ES165D安川机器人产品说明
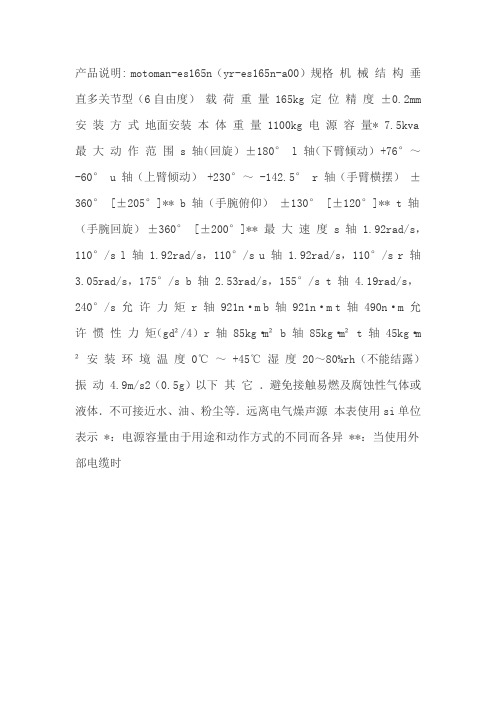
产品说明: motoman-es165n(yr-es165n-a00)规格机械结构垂直多关节型(6自由度)载荷重量 165kg 定位精度±0.2mm 安装方式地面安装本体重量 1100kg 电源容量* 7.5kva 最大动作范围 s 轴(回旋)±180° l 轴(下臂倾动) +76°~-60° u 轴(上臂倾动) +230°~ -142.5° r 轴(手臂横摆)±360° [±205°]** b 轴(手腕俯仰)±130° [±120°]** t 轴(手腕回旋)±360° [±200°]** 最大速度 s 轴 1.92rad/s,110°/s l 轴 1.92rad/s,110°/s u 轴 1.92rad/s,110°/s r 轴3.05rad/s,175°/s b 轴 2.53rad/s,155°/s t 轴 4.19rad/s,240°/s 允许力矩 r 轴 921n²m b 轴 921n²m t 轴 490n²m 允许惯性力矩(gd²/4) r 轴 85kg²m² b 轴 85kg²m² t 轴 45kg²m ²安装环境温度 0℃~ +45℃湿度 20~80%rh(不能结露)振动 4.9m/s2(0.5g)以下其它.避免接触易燃及腐蚀性气体或液体.不可接近水、油、粉尘等.远离电气燥声源本表使用si单位表示 *:电源容量由于用途和动作方式的不同而各异 **:当使用外部电缆时。
安川焊接机器人焊接系统构建焊接功能设置气体保护焊培训
Shougang Motoman Robot Co., Ltd.
14
焊接机器人知识
(熔化极气体保护焊)
6.1 焊接机器人基本构成图
(21) ⒆ ⒅ ⒄⒃
⒂
⑹
⑺
⑻
⑼
⑽
⑾
⒇
⑿
⒀
(24) (23)
(22)
⒁
(25)
⑴
(26)
导电嘴(CONTACT TIP) 喷嘴(NOZZLE)
保护气(SHIELDING GAS)
Shougang Motoman Robot Co., Ltd.
3
2. 熔化极气体保护焊的种类
使用惰性气体(Ar、He)保护的MIG溶接法(MIG WELDING), 使用CO2气体保护的CO2气保焊接法(CO2 WELDING)、以及使 用两者的混合气体保护的MAG溶接法(MAG WELDING)都称为 熔化极气体保护焊。
氦气(He)作为添加气体使用。电离的潜能、热传导性都比较大,可以取得高的热输 入量,并改善熔合效果,可实现高速度焊接。另外,与氩气相比,电弧较宽,可得到 平整的焊缝。
氧气(O2)少量添加可提高电弧的稳定性。电磁收缩的作用使得焊丝前端的熔滴呈小 颗粒过渡。同时降低熔池金属的表面张力,改善熔池的润湿性,从而得到比较美观的 焊缝。
焊接电流变化量 (A/mm)
3~4 5~6 7~8
Shougang Motoman Robot Co., Ltd.
12
5.7 熔化极气保焊实施的关键点
SGM
g)喷嘴直径
焊枪喷嘴的直径的选择要与焊接电流及焊接电压相匹配。
MOTOMAN机器人介绍
MOTOMAN机器人介绍MOTOMAN是一种先进的工业机器人,由Yaskawa Electric Corporation开发和制造。
它是一种高度灵活、精确和可编程的机器人,能够执行各种工业任务,包括焊接、装配、材料搬运、零件捡取和机械加工等。
MOTOMAN机器人采用先进的传感器技术和控制系统,能够实现高效率和精确的操作,大大提高了生产效率和质量。
MOTOMAN机器人的主要特点是其高度灵活和可编程性。
它可以在不同的工作环境中自由移动,并执行多种复杂任务。
MOTOMAN机器人的机械臂具有多个关节,可以以各种方式运动和操作,模拟人类的动作。
这使得机器人能够准确地操作各种设备和工具,完成各种精细的任务。
MOTOMAN机器人还配备了先进的传感器技术和视觉系统。
这些传感器可以检测和分析周围的环境,并根据需要调整机器人的动作和位置。
MOTOMAN机器人能够感知和避开障碍物,并在不同的工作环境中适应自由度的变化。
它还可以通过图像识别技术识别和捡取物体,无需人工干预。
MOTOMAN机器人的控制系统是其核心部分。
它使用先进的编程语言和算法,能够高效地控制机器人的动作和操作。
MOTOMAN机器人的控制系统具有很高的精度和稳定性,能够实现精确的操作,并准确地控制机器人的力量和速度。
这使得机器人可以在不同的工作环境中进行高效的运作,提高生产效率和质量。
MOTOMAN机器人还具有很强的可编程性。
它可以通过编程和编写控制程序,实现各种任务的自动化操作。
MOTOMAN机器人的编程语言简单易学,能够快速上手,并且支持多种编程方式,包括离线编程和在线编程。
这使得机器人可以轻松应对不同的操作需求,并根据需要灵活调整和优化程序。
MOTOMAN机器人在各个工业领域有着广泛的应用。
在汽车制造业中,MOTOMAN机器人可以进行汽车焊接、涂装和组装等工作,极大地提高了生产效率和质量。
在电子产品制造业中,MOTOMAN机器人可以进行电子元件的搬运和组装工作,有效地减少了人工操作和损耗。
安川焊接机器人说明书

在机器人运行过程中,保持警 惕,注意观察设备运行状态, 及时发现并处理问题。
应急处理预案制定
制定机器人故障应急 处理预案,明确故障 类型、处理措施和责 任人。
定期检查应急处理预 案的可行性和有效性 ,及时更新和完善预 案内容。
对操作人员进行应急 处理培训,提高他们 应对突发情况的能力 。
感谢您的观看
05
设备维护与保养
日常维护项目清单
清洁机器人表面
使用干布擦拭机器人表面,确 保无灰尘、油污等杂质。
检查电缆和连接器
检查所有电缆和连接器是否松 动或损坏,确保连接可靠。
检查焊接设备
检查焊枪、导电嘴等易损件, 如有磨损或损坏应及时更换。
润滑关节和轴承
按照使用说明书要求,定期为 机器人的关节和轴承添加润滑
伺服电机
驱动机器人各关节运动 ,实现精确的位置和速
度控制。
减速器
降低电机输出速度,增 加输出扭矩,提高机器
人动作精度。
控制器
接收外部指令,解析并 控制伺服电机运动,实
现机器人动作。
传感器
监测机器人状态和环境 信息,为控制器提供反
馈信号。
辅助设备及配件
01
02
03
04
示教器
用于手动操作机器人,进行示 教编程和调试。
06
安全注意事项及操作规范
安全防护措施建议
在机器人工作区域设置安全围 栏,确保人员不会误入危险区
域。
在机器人上安装急停按钮, 以便在紧急情况下迅速切断
电源。
定期对机器人进行安全检查和 维护,确保设备处于良好状态
。
操作规范要点提示
在操作机器人前,务必熟悉设 备的各项功能和操作流程。
RD350安川焊机介绍解读
低飞溅功能 起点功能 焊道外观
⑦ 对应短时间生产线建立使用方便
较宽幅度条件
② 适合最高等型号的CPU电源
DSP系统 数据库
⑧ 机器人焊接所需的再現性
1次电源电压变动对应 伺服送給装置
③ 对应各类焊接的万能性
从小电流到大电流「脉冲焊接」 从小电流到大电流「短路焊接」 脉冲/短路 各种材料
1.焊丝直到碰触前, 低速传送
2.通低电流拉回焊丝
3. 产生电弧后开始传送
・焊丝熔断而引起飞溅的情况较多。 ・细直径和低电气电阻的焊丝所引起起弧不良的情 况较多。
・大幅度提高电弧的点火(引燃)性能 ・在焊接电流较高等的情况时,压扁引燃的电弧, 有产生较多飞溅的情况。
RD350
New
4.机器人指令焊接条件所适应的最佳 加速,从点火(引燃)到焊接的过渡期 由软件控制
YASKAWA
Robotics Automation Division
16
RD350所能体现的较好焊缝外观
MOTOMAN
RD350从起弧到焊接所有的焊接都控制在最佳状态,达到较好焊缝外观。
焊接电流175A T字形角板MAG(短路)焊接例
以前的焊接电源
焊缝边凌乱(鳞状) 均一的焊缝边
RD350
无飞溅物 带飞溅物 焊缝表面有明显褶皱
YASKAWA
Robotics Automation Division
8
与以前的CO2焊接相比
MOTOMAN
RD350是通过高速高精度的数字式逆变控制以良好的电弧控制达到CO2短路
焊接的低飞溅。
RD350 CO2焊接(影像) 以前控制的焊接电源 CO2焊接(影像)
RD350 CO2焊接焊缝外观 搭接 焊接速度70cm/min 1.6t 2.3t 3.2t 搭接 焊接速度90cm/min 1.6t 2.3t 3.2t
(日)安川手册-安川机器人选型手册(全)
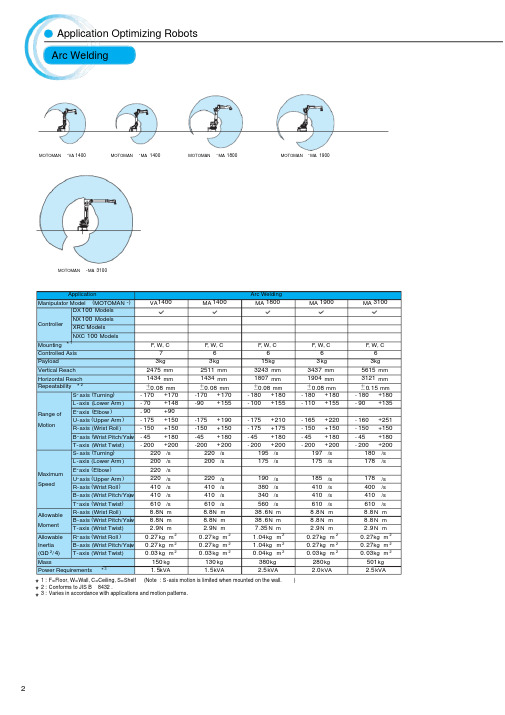
*1: F=Floor, W=Wall, C=Ceiling, S=Shelf (Note : S-axis motion is limited when mounted on the wall.)*2: Conforms to JIS B 8432.*3: Varies in accordance with applications and motion patterns.ApplicationArc Welding Manipulator Model (MOTOMAN -)VA 1400MA 1400MA 1800MA 1900MA 3100ControllerDX 100 Models NX 100 ModelsXRC ModelsNXC 100 Models Mounting *1F , W, C F , W, C F , W, C F , W, C F , W, CControlled Axis 76666Payload3kg3kg 15kg 3kg 3kg Vertical Reach 2475 mm2511 mm 3243 mm 3437 mm 5615 mm Horizontal Reach1434 mm 1434 mm 1807 mm 1904 mm 3121 mm Repeatability *2±0.08 mm±0.08 mm±0.08 mm±0.08 mm±0.15 mmRange ofMotion S -axis (Turning ) -170+170-170+170-180+180-180+180-180+180L -axis (Lower Arm ) -70+148-90+155-100+155-110+155-90+135E -axis (Elbow ) -90+90U -axis (Upper Arm ) -175+150-175+190-175+210-165+220-160+251R -axis (Wrist Roll ) -150+150-150+150-175+175-150+150-150+150B -axis (Wrist Pitch/Yaw) -45+180-45+180-45+180-45+180-45+180T -axis (Wrist Twist ) -200+200-200+200-200+200-200+200-200+200MaximumSpeedS -axis (Turning )220/s 220/s 195/s 197/s 180/s L -axis (Lower Arm )200/s 200/s 175/s 175/s 178/s E -axis (Elbow )220/sU -axis (Upper Arm )220/s 220/s 190/s 185/s 178/s R -axis (Wrist Roll )410/s410/s 380/s 410/s 400/s B -axis (Wrist Pitch/Yaw )410/s410/s 340/s 410/s 410/s T -axis (Wrist Twist )610/s 610/s 560/s 610/s 610/s Allowable MomentR -axis (Wrist Roll)8.8N m8.8N m 38.6N m 8.8N m 8.8N m B -axis (Wrist Pitch/Yaw )8.8N m8.8N m 38.6N m 8.8N m 8.8N m T -axis (Wrist Twist )2.9N m2.9N m 7.35N m 2.9N m 2.9N m Allowable R -axis (Wrist Roll )0.27kg m 20.27kg m 21.04kg m 20.27kg m 20.27kg m 2Inertia B -axis (Wrist Pitch/Yaw)0.27kg m 20.27kg m 21.04kg m 20.27kg m 20.27kg m 2(GD 2/4)T -axis (Wrist Twist )0.03kg m 20.03kg m 20.04kg m 20.03kg m 20.03kg m 2Mass 150kg130kg 380kg 280kg 501kg Power Requirements *31.5kVA1.5kVA2.5kVA2.0kVA2.5kVAApplication Optimizing Robots Arc WeldingMOTOMAN-VA 1400MOTOMAN -MA 3100MOTOMAN-MA 1400MOTOMAN-MA 1800MOTOMAN-MA 1900*1: F=Floor, W=Wall, C=Ceiling, S=Shelf (Note : S -axis motion is limited when mounted on the wall.)*2: Conforms to JIS B 8432.*3: Varies in accordance with applications and motion patterns.*4: When not used with an external cable.ApplicationSpot Welding Manipulator Model (MOTOMAN -)VS 50MS 80MS 120ES 165D ES 165RDES 200D ES 200RD ES 280DControllerDX 100 Models NX 100 ModelsXRC ModelsNXC 100 ModelsMounting *1F F F F S F S FControlled Axis 76666666Payload50kg80kg *4120kg 165kg *4165kg *4200kg *4200kg *4280kg Vertical Reach 2597 mm 3397 mm 2163 mm 3372 mm 4782 mm 3372 mm 4782 mm 3022 mm Horizontal Reach 1630 mm 2061 mm 1623 mm 2651 mm 3140 mm 2651 mm 3140 mm 2446 mmRepeatability *2±0.1 mm±0.07 mm ±0.2 mm ±0.2 mm±0.2 mm 0.2 mm±0.2 mm ±0.2 mm Range ofMotionS -axis (Turning )-180+180-180+180-150+150 -180+180-180+180-180+180-180+180-180+180L -axis (Lower Arm )-60+125-60+120-60+50-60+76-130+80-60+76-130+80-60+76E -axis (Elbow )-170+170U -axis (Upper Arm )-35+215-170+90-105+72 -142.5+230-112+208-142.5+230-107+208-142.5+230R -axis (Wrist Roll )-170+170-360+360*4-360+360-360+360*4-360+360*4 -360+360*4-360+360*4-360+360B -axis (Wrist Pitch/Yaw)-125+125-125+125*4-130+130-130+130*4-130+130*4 -125+125*4-125+125*4-125+125T -axis (Wrist Twist )-180+180-360+360*4-360+360-360+360*4-360+360*4-360+360*4-360+360*4-360+360MaximumSpeedS -axis (Turning )170/s 170/s 130/s 110/s 105/s 95/s 90/s *490/s L -axis (Lower Arm )130/s 140/s110/s 110/s105/s 90/s85/s *480/sE -axis (Elbow )130/sU -axis (Upper Arm )130/s 160/s 130/s 110/s105/s 95/s 85/s *490/s R -axis (Wrist Roll )130/s230/s 215/s 175/s 175/s 120/s 120/s 115/s B -axis (Wrist Pitch/Yaw )130/s230/s 180/s 150/s 150/s 120/s 120/s 110/s T -axis (Wrist Twist )200/s 350/s 300/s 240/s 240/s 190/s 190/s 190/s AllowableMomentR -axis (Wrist Roll )377N m392N m *4588N m 921N m *4921N m *41344N m *41344N m *41333N m B -axis (Wrist Pitch/Yaw )377N m392N m *4588N m 921N m *4921N m *41344N m *41344N m *41333N m T -axis (Wrist Twist )147N m196N m *4392N m 490N m 490N m 715N m 715N m 706N m A ll owab le R -axis (Wrist Roll )29.6kg m 228kg m 2*435kg m 285kg m 2*485kg m 2*4143kg m 2*4143kg m 2*4142kg m 2Inertia B -axis (Wrist Pitch/Yaw)29.6kg m 228kg m 2*435kg m 285kg m 2*485kg m 2*4143kg m 2*4143kg m 2*4142kg m 2(GD 2/4)T -axis (Wrist Twist )12.5kg m 211kg m 2*414.5kg m 245kg m 245kg m 280kg m 280kg m 279kg m 2Mass640kg 550kg 950kg 1100kg 1540kg 1130kg 1570kg 1120kg Power Requirements *35.0kVA 4.0kVA 4.5kVA 5.0kVA5.0kVA5.0kVA 5.0kVA 10kVAMOTOMAN -VS 50MOTOMAN -MS 80MOTOMAN -MS 120MOTOMAN -ES 165DMOTOMAN-ES 200DMOTOMAN-ES 200RDMOTOMAN-ES 280DMOTOMAN-ES 165RDApplication Optimizing Robots Spot WeldingApplicationMaterial Handling(General purpose)Manipulator Model (MOTOMAN -)HP 3JMH 5MH 5LMH 6MH 6SHP 20DHP 20D -6MH 50MH 50-20ControllerDX 100 ModelsNX 100 Models XRC Models NXC 100 Models*4*4Mounting *1F, W, CF , W, CF , W, CF , W, CF , W, CF, W, CF, W, CF , W, CF , W, CControlled Axis 666666666Payload 3kg 5kg 5kg 6kg 6kg 20kg 6kg 50kg 20kg Vertical Reach 804 mm 1193 mm 1560 mm 2486 mm 1597 mm 3063 mm 3459 mm 3578 mm 5585 mm Horizontal Reach 532 mm706 mm895 mm1422 mm997 mm1717 mm1915 mm2061 mm3106 mmRepeatability *2±0.03 mm ±0.02 mm ±0.03 mm ±0.08 mm ±0.08 mm ±0.06 mm ±0.06 mm ±0.07 mm ±0.15 mmRange of MotionS -axis (Turning )-160+160 -170+170 -170+170 -170+170 -170+170 -180+180 -180+180 -180+180 -180+180L -axis (Lower Arm) -85+90-65+150-65+150 -90+155 -80+133-110+155 -110+155-90+135 -90+135U -axis (Upper Arm) -105+260 -136+255 -138+255 -175+250 -130+165 -165+255 -160+255 -170+251 -160+251R -axis (Wrist Roll ) -170+170 -190+190 -190+190 -180+180 -180+180 -200+200 -200+200 -360+360 -190+190B -axis (Wrist Pitch/Yaw ) -120+120 -125+125 -125+125 -45+225 -45+225-50+230-50+230 -125+125-50+230T -axis (Wrist Twist) -360+360 -360+360 -360+360 -360+360 -360+360 -360+360 -360+360 -360+360 -360+360Maximum SpeedS -axis (Turning )200/s 376/s 270/s 220/s 220/s 197/s 197/s 180/s 180/s L -axis (Lower Arm )150/s350/s 280/s 200/s 220/s 175/s 175/s 178/s 178/s U -axis (Upper Arm )190/s 400/s 300/s 220/s 220/s 187/s 187/s 178/s 178/s R -axis (Wrist Roll )300/s 450/s 450/s 410/s 410/s 400/s 400/s 250/s 400/s B -axis (Wrist Pitch/Yaw )300/s 450/s 450/s 410/s 410/s 400/s 400/s 250/s 400/s T -axis (Wrist Twist)420/s 720/s 720/s 610/s 610/s 600/s 600/s 360/s 600/s Allowable Moment R -axis (Wrist Roll )5.39N m 12N m 12N m 11.8N m 11.8N m 39.2N m 11.8N m 216N m 39.2N m B -axis (Wrist Pitch/Yaw)5.39N m 12N m 12N m 9.8N m 9.8N m 39.2N m 9.8N m 216N m 39.2N m T -axis (Wrist Twist )2.94N m 7N m7N m5.9N m5.9N m19.6N m5.9N m147N m 19.6N m Allowable Inertia (GD 2/4)R -axis (Wrist Roll )0.1kg m 20.30kg m 20.30kg m 20.27kg m 20.27kg m 21.05kg m 20.24kg m 228kg m 21.05kg m 2B -axis (Wrist Pitch/Yaw)0.1kg m 20.30kg m 20.30kg m 20.27kg m 20.27kg m 21.05kg m 20.17kg m 228kg m 21.05kg m 2T -axis (Wrist Twist)0.03kg m 20.1kg m 20.1kg m 20.06kg m 20.06kg m 20.75kg m 20.06kg m 211kg m 20.75kg m 2Mass27kg28kg 30kg 130kg 120kg 268kg 273kg 550kg 495kg Power Requirements*30.5kVA1.0kVA1.0kVA1.5kVA1.5kVA2.0kVA2.0kVA4.0kVA3.5kVA*1: F=Floor, W=Wall, C=Ceiling, S=Shelf (Note : S-axis motion is limited when mounted on the wall.)*2: Conforms to JIS B 8432.*3: Varies in accordance with applications and motion patterns.*4: Only for handling.HandlingApplication Optimizing Robots MOTOMAN -HP 3J MOTOMAN-HP 20DMOTOMAN-HP 20D -6MOTOMAN-MH 50MOTOMAN-MH 50-20MOTOMAN-MH 5MOTOMAN-MH 5LMOTOMAN-MH 6MOTOMAN-MH 6SApplicationMaterial Handling(General purpose)Manipulator Model (MOTOMAN -)MH 80MH 165MH 200MH 215MH 250UP 350DUP 400RDUP 350D -500UP 350D -600ControllerDX 100 ModelsNX 100 Models XRC Models NXC 100 ModelsMounting *1F F F F F F S F FControlled Axis 666666666Payload 80kg 165kg *4200kg *4215kg 250kg 350kg 400kg 500kg 600kg Vertical Reach 3578 mm 3372 mm 3372 mm 3894 mm 3490 mm 2761 mm 4908 mm 2761 mm 2761 mm Horizontal Reach 2061 mm2651 mm2651 mm2912 mm2710 mm2542 mm3518 mm2542 mm2542 mmRepeatability *2±0.07 mm ±0.2 mm 0.2 mm ±0.2 mm 0.2 mm ±0.5 mm ±0.5 mm ±0.5 mm ±0.5 mmRange of Motion S -axis (Turning )-180+180 -180+180-180+180 -180+180 -180+180 -150+150 -150+150 -150+150 -150+150L -axis (Lower Arm)-90+135-60+76-60+76-60+76-60+76-55+61-122+20-55+61-55+61U -axis (Upper Arm ) -170+251 -142.5+230 -142.5+230 -142.5+230 -142.5+230-113+30-9+120-113+30-113+30R -axis (Wrist Roll ) -360+360 -360+360*4 -360+360*4 -360+360 -360+360 -360+360 -360+360 -360+360 -360+360B -axis (Wrist Pitch/Yaw ) -125+125 -130+130*4 -125+125*4 -125+125 -125+125 -125+125 -120+120 -125+125 -125+125T -axis (Wrist Twist ) -360+360 -360+360*4 -360+360*4 -360+360 -360+360 -360+360 -360+360 -360+360 -360+360Maximum SpeedS -axis (Turning )170/s 110/s 95/s 100/s 100/s 95/s 80/s 80/s 60/s L -axis (Lower Arm)140/s 110/s 90/s 90/s 90/s 95/s 80/s 80/s 70/s U -axis (Upper Arm )160/s 110/s 95/s 97/s 97/s 95/s 80/s 80/s 70/s R -axis (Wrist Roll )230/s 175/s 120/s 120/s 120/s 100/s 80/s 100/s 80/s B -axis (Wrist Pitch/Yaw )230/s 150/s120/s 120/s 120/s 100/s 80/s 100/s 80/s T -axis (Wrist Twist)350/s 240/s190/s190/s190/s 160/s 160/s 160/s 160/s Allowable Moment R -axis (Wrist Roll )392N m 921N m *41344N m *41176N m 1385N m 1960N m 1960N m 1960N m 2450N m B -axis (Wrist Pitch/Yaw)392N m 921N m *41344N m *41176N m 1385N m 1960N m 1960N m 1960N m 2450N m T -axis (Wrist Twist )196N m 490N m 715N m 710N m735N m 823N m 833N m 823N m 823N m Allowable Inertia (GD 2/4)R -axis (Wrist Roll )28kg m 285kg m 2*4143kg m 2*4317kg m 2317kg m 2150kg m 2150kg m 2150kg m 2200kg m 2B -axis (Wrist Pitch/Yaw)28kg m 285kg m 2*4143kg m 2*4317kg m 2317kg m 2150kg m 2150kg m 2150kg m 2200kg m 2T -axis (Wrist Twist)11kg m 245kg m 280kg m 2200kg m 2200kg m 290kg m 250kg m 290kg m 290kg m 2Mass555kg 1100kg 1130kg 1140kg 1130kg 2200kg 3600kg 2350kg 2400kg Power Requirements *34.5kVA5.0kVA5.0kVA6.0kVA6.0kVA5.5kVA12kVA5.5kVA7.0kVA*1: F=Floor, W=Wall, C=Ceiling, S=Shelf (Note : S-axis motion is limited when mounted on the wall.)*2: Conforms to JIS B 8432.*3: Varies in accordance with applications and motion patterns.*4: When not used with an external cable.MOTOMAN-MH 80MOTOMAN -MH 250MOTOMAN -UP 350D MOTOMAN -UP 400RDMOTOMAN -UP 350D -500MOTOMAN -UP 350D -600MOTOMAN-MH 165MOTOMAN-MH 200MOTOMAN-MH 215ApplicationPicking / Packing PalletizingManipulator Model(MOTOMAN -)MPK 2MPK 50MPL 80MPL 100MPL 160MPL 300MPL 500MPL 800ControllerDX 100 Models NX 100 ModelsXRC Models NXC 100 ModelsMounting *1F ,W,C F F F F F F FControlled Axis 54544444Payload2kg50kg 80kg 100kg 160kg 300kg 500kg 800kg Vertical Reach 1625 mm 1668 mm 3291 mm 3024 mm 3024 mm 3024 mm 3024 mm 3024 mm Horizontal Reach900 mm1893 mm 2061 mm 3159 mm 3159 mm 3159 mm 3159 mm 3159 mm Repeatability *2±0.5 mm±0.5 mm ±0.07 mm ±0.5 mm ±0.5 mm ±0.5 mm ±0.5 mm ±0.5 mm Range of MotionS -axis (Turning )-170+170-180+180-180+180-180+180 -180+180 -180+180 -180+180 -180+180L -axis (Lower Arm)-120+120-35+80-90+135-45+90-45+90-45+90-45+90-45+90U -axis (Upper Arm)-102+282-105+15-160+35-120+15.5-120+15.5-120+15.5-120+15.5-120+15.5R -axis (Wrist Roll )B -axis (Wrist Pitch/Yaw)-150+150 -15+15T -axis (Wrist Twist)-270+270 -350+350- 360+360-360+360 -360+360-360+360-360+360-360+360Maximum SpeedS -axis (Turning )320/s185/s 170/s 140/s 140/s 90/s85/s 65/s L -axis (Lower Arm )330/s215/s 170/s 140/s 140/s 100/s 85/s 65/s U -axis (Upper Arm )330/s215/s 170/s140/s 140/s110/s 85/s 65/sR -axis (Wrist Roll )B -axis (Wrist Pitch/Yaw )380/s 170/s T -axis (Wrist Twist )2000/s374/s350/s 305/s 305/s 195/s 195/s 125/sAllowableMoment R -axis (Wrist Roll )B -axis (Wrist Pitch/Yaw)3.5N m 78.4N m T -axis (Wrist Twist )1.5N m 20.5N m Allowable R -axis (Wrist Roll )Inertia B -axis (Wrist Pitch/Yaw)0.065kg m 216kg m 2(GD 2/4)T -axis (Wrist Twist)0.012kg m 25.5kg m 26.1kg m 280kg m 280kg m 2140kg m 2200kg m 2550kg m 2Mass75kg 670kg 550kg 1700kg 1700kg 1820kg 2300kg 2550kg Power Requirements *31.5kVA4.0kVA 4.0kVA9.5kVA9.5kVA 9.5kVA 9.5kVA 10kVA*1: F=Floor, W=Wall, C=Ceiling, S=Shelf (Note : S -axis motion is limited when mounted on the wall.)*2: Conforms to JIS B 8432.*3: Varies in accordance with applications and motion patterns.Picking / PackingPalletizingApplication Optimizing Robots MOTOMAN -MPK 2MOTOMAN -MPK 50MOTOMAN-MPL 80MOTOMAN -MPL 160MOTOMAN -MPL 300MOTOMAN -MPL 500MOTOMAN -MPL 800MOTOMAN-MPL 100ApplicationAssembly & Distributing Manipulator Model(MOTOMAN -)SIA 5D SIA 10D SIA 20DSIA 30D SIA 50DSDA 5D SDA 10D SDA 20DControllerDX 100 Models NX 100 ModelsXRC ModelsNXC 100 ModelsMounting *1F , W, C F, W, C F , W, C F F F , C F FDegrees of Freedom 77777151515Payload5kg 10kg 20kg 30kg 50kg 5kg/Arm 10kg/Arm 20kg/Arm Vertical Reach 1007 mm 1203 mm 1498 mm 2597 mm 2597 mm 1118 mm 1440 mm 1820 mm Horizontal Reach 559 mm 720 mm 910 mm 1485 mm 1630 mm 1604 mm 1970 mm 2590 mm Ripeatability*2±0.06 mm±0.1 mm±0.1 mm±0.1 mm±0.1 mm±0.06 mm ±0.1 mm ±0.1 mm Range of MotionRotation-170+170 -170+170 -180+180S -axis (Turning ) -180+180 -180+180-180+180 -180+180 -180+180 -90+270, -270+90 -180+180 -180+180L -axis (Lower Arm) -110+110 -110+110 -110+110 -125+125 -60+125 -110+110 -110+110 -110+110E -axis (Elbow ) -170+170 -170+170 -170+170 -170+170 -170+170 -170+170-170+170 -170+170U -axis (Upper Arm ) -90+115 -135+135 -130+130 -110+110 -35+215-90+115 -135+135 -130+130R -axis (Wrist Roll ) -180+180 -180+180 -180+180 -170+170 -170+170 -180+180 -180+180 -180+180B -axis (W rist Pitch/Yaw ) -110+110 -110+110 -110+110 -110+110 -125+125 -110+110 -110+110 -110+110T -axis (Wrist Twist) -180+180-180+180 -180+180 -180+180 -180+180-180+180 -180+180 -180+180Maximum SpeedRotation180/s 130/s 125/s S -axis (Turning )200/s 170/s130/s 130/s 170/s 200/s 170/s 130/s L -axis (Lower Arm )200/s170/s 130/s 130/s 130/s 200/s 170/s 130/s E -axis (Elbow )200/s170/s 170/s 130/s 130/s 200/s 170/s 170/s U -axis (Upper Arm )200/s 170/s 170/s 130/s 130/s 200/s 170/s 170/s R -axis (Wrist Roll )200/s 200/s 200/s 170/s 130/s 200/s 200/s 200/s B -axis (W rist Pitch/Yaw )230/s 200/s 200/s 170/s 130/s 230/s 200/s 200/s T -axis (Wrist Twist )350/s400/s 400/s 200/s 200/s 350/s 400/s 400/s AllowableMoment R -axis (Wrist Roll )14.7N m31.4N m 58.8N m 117.6N m 377N m 14.7N m 31.4N m 58.8N m B -axis (W rist Pitch/Yaw)14.7N m 31.4N m 58.8N m 117.6N m 377N m 14.7N m 31.4N m 58.8N m T -axis (Wrist Twist )7.35N m 19.6N m 29.4N m 58.8N m 147N m 7.35N m 19.6N m 29.4N m Allowable R -axis (Wrist Roll )0.45kg m 21.0kg m 24.0kg m 26.0kg m 229.6kg m 20.45kg m 21.0kg m 24.0kg m 2Inertia B -axis (W rist Pitch/Yaw)0.45kg m 21.0kg m 24.0kg m 26.0kg m 229.6kg m 20.45kg m 21.0kg m 24.0kg m 2(GD 2/4)T -axis (Wrist Twist )0.11kg m 20.4kg m 22.0kg m 23.0kg m 212.5kg m 20.11kg m 20.4kg m 22.0kg m 2Mass 30kg 60kg 120kg 345kg 640kg 110kg 220kg 380kg Power Requirements *31.0kVA1.5kVA2.2kVA 2.8kVA 5.0kVA1.4kVA2.7kVA4.4kVA*1: F=Floor, W=Wall, C=Ceiling, S=Shelf *2: Conforms to JIS B 8432.*3: Varies in accordance with applications and motion patterns.MOTOMAN-SIA 5DMOTOMAN-SIA 50DMOTOMAN-SDA 5DMOTOMAN-SDA 10DMOTOMAN-SDA 20DMOTOMAN-SIA 10DMOTOMAN-SIA 20DMOTOMAN-SIA 30DAssembly & DistributingApplication Optimizing RobotsApplicationPress Handling Manipulator Model (MOTOMAN -)EPH 130EPH 130REPH 130RLEPH 4000EP 4000NControllerDX 100 Models NX 100 ModelsXRC ModelsNXC 100 ModelsMounting *1F S S S SControlled Axis 66666Payload130kg 130kg 130kg 200kg 200kg Vertical Reach 3372 mm 3775 mm 4151 mm 2629 mm 2629 mm Horizontal Reach2651 mm3134 mm 3474 mm 3505 mm 3505 mm Repeatability *2±0.2 mm±0.2 mm ±0.3 mm ±0.5 mm ±0.5 mm Range of MotionS -axis (Turning ) -180+180 -180+180 -180+180 -150+150 -150+150L -axis (Lower Arm ) -60+76-130+70-130+70-122+25-122+25U -axis (Upper Arm ) -137.5+230-70+95-70+95-70+53-70+53R -axis (Wrist Roll ) -360+360 -360+360 -360+360 -360+360 -360+360B -axis (Wrist Pitch/Yaw) -130+130 -130+130 -130+130 -120+120 -120+120T -axis (Wrist Twist ) -360+360 -360+360 -360+360 -360+360-360+360Maximum SpeedS -axis (Turning )130/s 110/s 110/s 90/s 90/s L -axis (Lower Arm )130/s110/s 110/s 90/s 90/s U -axis (Upper Arm )130/s110/s 110/s 90/s 90/s R -axis (Wrist Roll )215/s 215/s 215/s 80/s 80/s B -axis (Wrist Pitch/Yaw )180/s180/s 180/s 80/s 80/s T -axis (Wrist Twist )300/s 300/s 300/s 160/s 160/s AllowableMomentR -axis (Wrist Roll )735N m735N m 735N m 1274N m 1274N m B -axis (Wrist Pitch/Yaw)735N m 735N m 735N m 2156N m 2156N m T -axis (Wrist Twist )421N m421N m 421N m 0N m 0N m Allowabl e R -axis (Wrist Roll )45kg m 245kg m 245-130kg m 2*484.5kg m 284.5kg m 2Inertia B -axis (Wrist Pitch/Yaw )45kg m 245kg m 245-130kg m 2*4330kg m 2330kg m 2(GD 2/4)T -axis (Wrist Twist )15kg m 215kg m 215-38kg m 2*480kg m 280kg m 2Mass 1495kg 1420kg 1445kg 3050kg 3100kg Power Requirements *310kVA 10kVA 10kVA 22kVA22kVA*1:F=Floor, W=Wall, C=Ceiling, S=Shelf (Note : S -axis motion is limited when mounted on the wall.)*2: Conforms to JIS B 84323.*3: Varies in accordance with applications and motion patterns.*4: Varies in accordance with load torque.Press HandlingApplication Optimizing Robots MOTOMAN-EPH 130MOTOMAN-EP 4000NMOTOMAN-EPH 130RMOTOMAN-EPH 130RLMOTOMAN-EPH 4000*1: F=Floor, W=Wall, C=Ceiling, S=Shelf (Note : S -axis motion is limited when mounted on the wall.)*2: Conforms to JIS B 8432.*3: Varies in accordance with applications and motion patterns.*4-130+90(S-axis -90+90)-130+30(S-axis +90+120)-130+30(S-axis -90-120)ApplicationPainting Manipulator Model (MOTOMAN -)EPX 1250EPX 2050PX 2750EPX 2700EPX 2800EPX 2800R EPX 2900ControllerDX 100 Models NX 100 ModelsXRC ModelsNXC 100 ModelsMounting *1F ,W,C F F W F S FControlled Axis 6666666Payload5kg 15kg 10kg 15kg 20kg 15kg 20kg Vertical Reach 1852 mm 2806 mm 3758 mm 5147 mm 4582 mm 4751 mm 4410 mm Horizontal Reach1256 mm 2054 mm 2729 mm 2700 mm 2778 mm 2825 mm 2900 mm Repeatability *2±0.15 mm±0.5 mm±0.5 mm±0.15 mm ±0.5 mm ±0.5 mm ±0.5 mm Range of MotionS -axis (Turning ) -170+170 -90+90 -150+150-125+25, -25+125 -150+150-120+120 -150+150L -axis (Lower Arm )-65+120 -50+100-40+90-65+140-45+120*4-50+110U -axis (Upper Arm )-165+205-163+5+10+168-65+90-85+90-70+90-70+90R -axis (Wrist Roll ) -190+190 -360+360 -260+260 -720+720-360+360 -360+360 -360+360B -axis (Wrist Pitch/Yaw) -145+145 -360+360 -270+270 -720+720-360+360 -360+360 -360+360T -axis (Wrist Twist ) -360+360 -360+360 -260+260 -720+720-360+360-360+360-360+360Maximum SpeedS -axis (Turning )185/s 2.0m/s 2.0m/s 2.0m/s 2.0m/s 2.0m/s155/s L -axis (Lower Arm )185/s 125/s U -axis (Upper Arm )185/s 155/s R -axis (Wrist Roll )360/s 450/s B -axis (Wrist Pitch/Yaw )410/s 550/s T -axis (Wrist Twist )500/s 650/s Allowable MomentR -axis (Wrist Roll )8.0N m 45.8N m 30.4N m 45.8N m 77.4N m 45.8N m 72.0N m B -axis (Wrist Pitch/Yaw)8.0N m 33.8N m 19.6N m 33.8N m 49.9N m 33.8N m 51.5N m T -axis (Wrist Twist )3.0N m 10.8N m 9.8N m 10.8N m 19.6N m 10.8N m 19.6N m Allowable R -axis (Wrist Roll )0.20kg m 21.45kg m 20.97kg m 21.45kg m 22.45kg m 21.45kg m 22.73kg m 2Inertia B -axis (Wrist Pitch/Yaw)0.20kg m 20.79kg m 20.40kg m 20.79kg m 21.20kg m 20.79kg m 21.63kg m 2(GD 2/4)T -axis (Wrist Twist )0.07kg m 20.10kg m 20.10kg m 20.10kg m 20.20kg m 20.10kg m 20.20kg m 2Mass110kg 540kg 560kg 590kg 650kg 820kg 1030kg Power Requirements*31.5kVA5.0kVA 5.0kVA 5.0kVA5.0kVA 5.0kVA5.0kVAType L Type RMOTOMAN -EPX 1250MOTOMAN -EPX 2800MOTOMAN -EPX 2800R MOTOMAN -EPX 2900MOTOMAN -EPX 2050MOTOMAN -PX 2750MOTOMAN -EPX 2700PaintingApplication Optimizing RobotsControllersController ModelDX 100DX 100(Assembly & Distributing )NX 100NXC 100Manipulator Model Small Model VA 1400, MA 1400, MA 1900MA 3100, MH 5, MH 5L, MH 6, MH 6S, HP 20D, HP 20D -6, MPK 2SIA 5D, SIA 10D, SIA 20DHP 3J, MH 5, MH 5LLarge Model MA 1800, VS 50, MS 80, MS 120, ES 165D, ES 165RD, ES 200D,ES 200RD, ES 280D *2, MH 50, MH 50-20, MH 80, MH 165, MH 200,MH 215*2,MH 250*2, UP 350D, UP 400RD, UP 350D -500, UP 350D -600, MPK 50*2, MPL 80*2, MPL 100*2, MPL 160*2, MPL 300*2, MPL 500*2, SIA 30D, SIA 50DSDA 5D, SDA 10D, SDA 20D EPH 130, EPH 130R,EPH 130RL, EPH 4000,EP 4000N Dimensions(W ×H ×D )Small Model425×1200×450 mm (Possible to control 3 external axes )500×580×580 mm (Possible to control 1 external axes )500×1200×500mm (Possible to control 2 external axes )485×183×300 mm (Possible to control 1 external axes )Large Model425×1200×450 mm (Possible to control 2 external axes )500×880×580 mm (Possible to control 1 external axes )600×1200×550 mm(Possible to control 2 external axes)Approximate Mass Small Model100kg 100kg 100kg 16kg Large Model 100kg *2150kg 150kg IEC Protection Class IP 54IP 54IP 51IP 20Dimensions (W ×H ×D )169×314.5×50 mm 169×314.5×50 mm 199×338×60 mm 199×338×60 mm Approximate Mass 0.990kg 0.990kg 1.320kg 1.320kg IEC Protection Class IP 65IP 65IP 65IP 65External Interface CF slot ×1USB Port (1.1)×1CF slot ×1USB Port (1.1)×1CF slot ×1CF slot ×1Number of Controlled Manipulators Up to 8 manipulators Up to 8 manipulators Up to 4 manipulators Up to 4 manipulators Number of Controlled Axes Up to 72 axes Up to 72 axes Up to 36 axes Up to 36 axesNumber ofJOBs Robot 16 JOBs 16 JOBs 8 JOBs 8 JOBs System 4 JOBs 4 JOBs 4 JOBs 4 JOBs Up to 32 groups Up to 32 groups Up to 16 groups Up to 16 groups Robot Up to 8 groups (R 1 to R 8)Up to 8 groups (R 1 to R 8)Up to 4 groups (R 1 to R 4)Up to 4 groups (R 1 to R 4)Base Up to 8 groups (B 1 to B 8)Up to 8 groups (B 1 to B 8)Up to 4 groups (B 1 to B 4)Up to 4 groups (B 1 to B 4)Station Up to 24 groups (S 1 to S 24)Up to 24 groups (S 1 to S 24)Up to 12 groups (S 1 to S 12)Up to 12 groups (S 1 to S 12)JOB CapacityJOB :200000 steps Robot command :10000 steps JOB :200000 steps Robot command :10000 steps JOB :60000 steps Robot command :10000 steps JOB :60000 stepsRobot command :10000 stepsCIO Ladder 20000 steps 20000 stepsStandard :10000 steps Extension :15000 steps Standard :10000 stepsExtension :15000 stepsI/OSystem Input :2048(max.)System Output :2048(max.)System Input :2048(max.)System Output :2048(max.)System Input :1024(max.)System Output :1024(max.)System Input :1024(max.)System Output :1024(max.)Number of JOB NamesUp to 32 digitsUp to 32 digitsUp to 8 digitsUp to 8 digits*1: These specifications and dimensions are for standard specifications and they are subject to change due to the optional installation.*2: When manipulator is ES 280D, MH 215, MH 250, MPK 50, MPL 80, MPL 100, MPL 160, MPL 300, and MPL 500, the regenerative resistor box (120 mm in depth, 50kg ) is mounted on the surface of the backside of the controller. Note : Contact YASKAWA regarding the dimension of the controller for MPL 800.Standard Specifi cations of Controller*1Small modelSmall model(for single -arm robots )Small modelLarge modelLarge model (for dual -arm robots)Large model DX 100NXC 100DX 100(Assembly & Distributing)NX 100Co n t r o l l e rs Pr o g r a m m i n g Pe n d a n t So f t w a r e Number of Controlled GroupsController Model NX 100(Painting )XRC (Painting )ManipulatorModel Standard Pendant EPX 2050, EPX 2700, EPX 2800, EPX 2800R, EPX 2900PX 2750Explosion-proof PendantEPX 2050, EPX 2700, EPX 2800, EPX 2800R, EPX 2900PX 2750Dimensions(W ×H ×D )Standard Pendant974×1200×600 mm(Possible to control 3 external axes )974×900×600 mm(Possible to control 3 external axes)Explosion-proof Pendant 974×1200×600 mm(Possible to control 3 external axes )974×1300×600 mm(Possible to control 3 external axes)Approximate Mass Standard Pendant 250kg 100kg Explosion -proof Pendant 250kg 200kg IEC Protection Class IP 41(Option : IP 54)IP 41Dimensions (W ×H ×D )Standard Pendant 199×338×60 mm 200×325×77 mm Explosion -proof Pendant 235×203×78 mm211×382×75 mmApproximate MassStandard Pendant1.32kg 1.2kgExplosion-proof Pendant 1.25kg 2.0kg IEC Protection Class IP 65IP 40External InterfaceCF slot ×1Standard RS 232C for Backup Explosion -proof N/ANumber of Controlled Manipulators Up to 4 robots Up to 3 robots Number of Controlled Axes Up to 36 axesUp to 27 axesNumber of JOBs Robot 8 JOBs 6 JOBsSystem4 JOBsUp to 16 groupsUp to 8 groupsRobot UP to 4 groups (R 1 to R 4)UP to 3 groups (R 1 to R 3)Base UP to 4 groups (B 1 to B 4)UP to 3 groups (B 1 to B 3)StationUP to 12 groups (S 1 to S 12)UP to 6 groups (S 1 to S6)JOB Capacity 60000 steps 10000 steps60000 steps 10000 steps CIO Ladder Standard :10000 steps Extension :15000 steps 1500 stepsI/OSystem Input :1024(max.)System Output :1024(max.)System Input :256(max.)System Output :256(max.)Number of JOB NamesUp to 8 digitsUp to 8 digits*: These specifications and dimensions are for standard specifications and they are subject to change due to the optional installation.Note : Contact YASKAWA regarding the dimension of the controller for EPX1250.Standard Specifi cations of Controller *Standard pendant model Standard pendant modelExplosion -proof pendant model Explosin -proof pendant modelNX 100(Painting )XRC (Painting )For PaintingCo n t r o l l e r s So f t w a r e Pr o g r a m m i n g Pe n d a n t Number of Controlled Groups。
安川MOTOMAN工业机器人编程与操作(3)
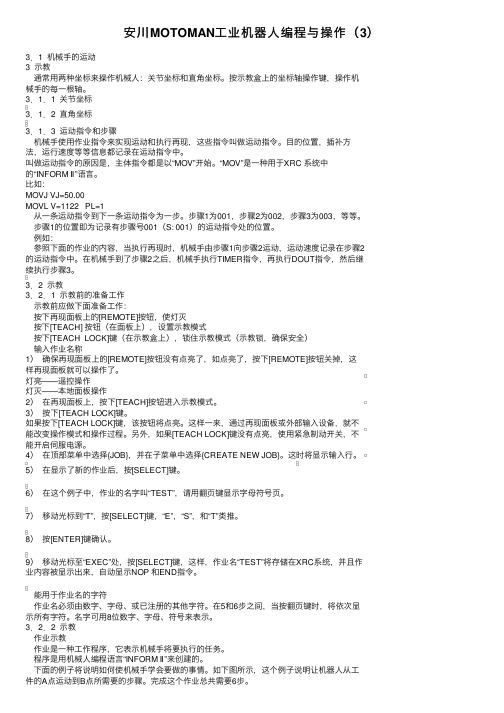
安川MOTOMAN⼯业机器⼈编程与操作(3)3.1 机械⼿的运动3 ⽰教通常⽤两种坐标来操作机械⼈:关节坐标和直⾓坐标。
按⽰教盒上的坐标轴操作键,操作机械⼿的每⼀根轴。
3.1.1 关节坐标3.1.2 直⾓坐标3.1.3 运动指令和步骤机械⼿使⽤作业指令来实现运动和执⾏再现,这些指令叫做运动指令。
⽬的位置,插补⽅法,运⾏速度等等信息都记录在运动指令中。
叫做运动指令的原因是,主体指令都是以“MOV”开始。
“MOV”是⼀种⽤于XRC 系统中的“INFORM Ⅱ”语⾔。
⽐如:MOVJ VJ=50.00MOVL V=1122 PL=1从⼀条运动指令到下⼀条运动指令为⼀步。
步骤1为001,步骤2为002,步骤3为003,等等。
步骤1的位置即为记录有步骤号001(S: 001)的运动指令处的位置。
例如:参照下⾯的作业的内容,当执⾏再现时,机械⼿由步骤1向步骤2运动,运动速度记录在步骤2的运动指令中。
在机械⼿到了步骤2之后,机械⼿执⾏TIMER指令,再执⾏DOUT指令,然后继续执⾏步骤3。
3.2 ⽰教3.2.1 ⽰教前的准备⼯作⽰教前应做下⾯准备⼯作:按下再现⾯板上的[REMOTE]按钮,使灯灭按下[TEACH] 按钮(在⾯板上),设置⽰教模式按下[TEACH LOCK]键(在⽰教盒上),锁住⽰教模式(⽰教锁,确保安全)输⼊作业名称1)确保再现⾯板上的[REMOTE]按钮没有点亮了,如点亮了,按下[REMOTE]按钮关掉,这样再现⾯板就可以操作了。
灯亮——遥控操作灯灭——本地⾯板操作2)在再现⾯板上,按下[TEACH]按钮进⼊⽰教模式。
3)按下[TEACH LOCK]键。
如果按下[TEACH LOCK]键,该按钮将点亮。
这样⼀来,通过再现⾯板或外部输⼊设备,就不能改变操作模式和操作过程。
另外,如果[TEACH LOCK]键没有点亮,使⽤紧急制动开关,不能开启伺服电源。
4)在顶部菜单中选择{JOB},并在⼦菜单中选择{CREATE NEW JOB}。
安川多功能用途机器人(中文)MOTOMAN-MH HP_CN

MOTOMAN-XMXH152S3
Մൖ࣭负ྔ载 05k0g0k,g最大伸长度R7R0060m0mmm 对应DX100 对应FS100
740
尺寸及动作范围
单位 : mm
4×M8×P1.25
深 : 16
170
423 298
70 55
: P 点动作范围
4×M4×P0.7 深: 8
2×M4×P0.7 深: 8
仿真已不仅限于对机器人动作的仿真,并且进化为可再现实 机的功能,操作,画面显示的虚拟控制器。有机器人操作知 识的人都可轻松进行仿真作业。
简单 维修 故障诊断
MOTOMAN不断追求监控,故障诊断及构造上的改善,从而缩短维修时间与故障发生后的恢复时间。
故障诊断功能
缩短部件更换时间
报警发生时,在示教编程器上会显示报警详细内容,原因及 策。对故障发生时的解决提供帮助。
硬件
机器人本体
DX100 控制柜
臣蚧 鞒
同级别性能最高
通过应用高速小惯量伺服电机和最新控制技术,实现 世界最快速。在腕部容许惯量增加的同时,保证了机 器人本体的小型化。
小型控制柜(宽425mm),占地面积 减小23% * 2 。通过 安装偏柜最多可 以控制72个轴(8台机器人)。
应对恶劣环境作业
机器人进入待机后,
会切断电机的输出, 节能
并启动抱闸。
约 25%
待机开始,经过
一定时间后,会 时间
启动抱闸。
*5 : 可适用的机器人机型,请咨询本公司。
3
短流程的总体方案
轻松 操作 仿真
示教和仿真的操作性提高,大大缩短系统集成所需要的时间。
多窗口显示功能
仿真 MotoSimEG-VRC 选项
RD350安川焊机介绍解读
YASKAWA
Robotics Automation Division
8
与以前的CO2焊接相比
MOTOMAN
RD350是通过高速高精度的数字式逆变控制以良好的电弧控制达到CO2短路
焊接的低飞溅。
RD350 CO2焊接(影像) 以前控制的焊接电源 CO2焊接(影像)
RD350 CO2焊接焊缝外观 搭接 焊接速度70cm/min 1.6t 2.3t 3.2t 搭接 焊接速度90cm/min 1.6t 2.3t 3.2t
⑨ 自动化生产线的焊接品質管理
电弧检测 地线电阻測定
④ 机器人焊接必要的高效性。
防止短停 高速焊接
⑩ 对应更高要求的扩展性
伺服焊枪 极薄板焊接
⑤ 对应高生产性的耐环境性
控制部防尘构造 过滤标准装备
⑪ 对应所有MOTOMAN用户互换性
切换其他MOTOWELD 已有MOTOMAN的対応
⑥ 支持高生产的保全性
DSP的高速处理下,熔滴在脱离的临界点 检出变细
YASKAWA
Robotics Automation Division
6
稳定生成理想的熔滴技术
MOTOMAN
以前的焊接电源
焊丝中途熔断 熔滴非常小 恰当的熔滴状 态 熔滴较大 被吹到空气中的溶滴
熔滴非常小时
熔池温度下降时
熔池温度上升时
熔滴较大时
由于熔池的温度变动,焊丝前端生成的熔滴大小程度不稳定,因影响理想的熔滴移动,而容易产 生飞溅。
MOTOMAN实现顾客满意度NO.1
MOTOMAN
新数字式逆变焊接电源 ROBOT DIGITAL WELDER ー RD350
说明用资料
YASKAБайду номын сангаасA
motoman安川机器人示教器编程详解.docx
motoman安川机器人示教器编程详解产品介绍:主要用途:可对本机和主控箱进行控制和编程,使机器人及配套设备能够按照实际工作需要准时、到位的工作。
产品特性:是机器人操作必不可少的主要控制部件,因使用频繁且使用时容易摔落,故障率一般是机器人所有部件有较为高的。
功能特性:设有用于对机器人进行示教和编程所需的操作键和按钮安川机器人示教器编程一、创建焊接程序[焊缝的示教]。
1、打开控制柜上的电源开关在ON状态。
2、将运作模式调到TEACP H示教模式下1. 进入程序编辑状态:1.1. 先在主菜单上选择[程序]一览并打开;1.2. 在[程序]的主菜单中选择[新建程序]1.3. 显示新建程序画面后按[选择]键14显示字符画面后输入程序名现以TEST为新建程序名举例说明;1.5. 把光标移到字母T” E” S” T”上按[选择]键选中各个字母;1.6. 按[回车]键进行登录;1.7. 把光标移到执行”上并确认后,程序TEST被登录,并且屏幕画面上显示该程序的初始状态NOPCEO”、O ENDCOO”L1.8. 编辑机器人要走的轨迹(以机器人焊接直线焊缝为例);2. 把机器人移动到离安全位置,周边环境便于作业的位置,输入程序(001);2.1. 握住安全电源开关,接通伺服电源机器人进入可动作状态;2.2. 用轴操作键将机器人移动到开始位置(开始位置电影摄制在安全病史和作业准备位置);2.3. 按[插补方式]键,把插补方式定为关节插补,输入缓冲显示行中显示关节插补命令,?MOVJ^” MOVJ,,VJ=0.78”2.4. 光标放在00000”处,按[选择]键;2.5. 把光标移动到右边的速度VJ=** ”上,按[转换]键+光标上下” 键,设定再现速度,若设定速度为50%寸,则画面显示■ MOUWJ=50%, 也可以把光标移到右边的速度,?VJ=***' 上按[选择]键后,可以直接在画面上输入要设定的速度,然后按[回车]键确认。
安川MOTOMAN工业机器人编程与操作(1)

安川MOTOMAN工业机器人编程与操作(1)控制箱发展80年代90年代系列XG ZX ERC MRC XRC (98~99年)字长8位16位16位32位32位CPU 8085 8086 80286 80386 80486 (27个外轴、三个本体) 外部轴:本体俯焊好,不能仰焊,要增加手臂自由度,成本太高,带外部轴可增加功能。
XRC控制柜慨述主电源开关和门锁位于XRC控制柜的面板上,示教盒挂在控制柜的右上方,再现面板位于控制柜的柜门上,如图所示。
再现面板上的按钮都用方括号及方括号中的文字表示。
比如[TEACH]表示再现面板上的示教按钮。
示教盒键的表示•命名键在本教材中,命名键用方括号及方括号中的文字表示。
比如[TEACH LOCK]表示示教盒上的示教锁定键。
数字键除了数字功能外,还有其他功能,具有双重功能键。
比如可以表示成[1]或[TIMER] •符号键符号键不用方括号来表示,而用一个小图标来表示。
•坐标轴键与数字键当同时表示所有键时,坐标轴键和数字键用“Axis Operation Keys”和“Number Keys”表示。
•组合键组合键用“+”号连接表示,比如[SHIFT]+[COORD]。
屏幕说明本教材中,示教盒显示区中的菜单条目,用{×××}来表示。
比如{JOB}表示JOB菜单。
这些菜单的下拉菜单用同样的方式表示。
在本教材中,用4种屏幕视图来图解说明示教盒显示区。
操作顺序按下列操作顺序来使用机器人:1)开启XRC控制柜;2)示教机械人一种作业;3)机械人自动完成作业(称为“再现”);4)当完成作业后,关闭电源。
来源:工业机器人与智能制造。
MOTOMAN-UP20型机器人介绍

3. 按下[前进]键,利用机器人的动作确认每一个程序点。每按一次[前进]键, 机器人移动一个程序点。 4. 程序点完成确认后,将光标放回程序起始处。 5. 所有程序点的连续动作:按下[联锁]键的同时,按下[试运行]键,机器人连 续再现所有程序点,1个循环后停止。
37
3.2.4 程序的修改
对程序进行位置修改、程序点插入或删除时,按以下步骤来编辑程序。
33
程序点6——开始位置附近
1. 用轴操作键把机器人移开始点附近。
4. 按[回车]键,输入程序点6(行0006)。
示教结束
34
最初的程序点和最后的程序点重合
现在机器人停在第1程序点附近的第6程序点处。这时,如果能从作业结 束位置的程序点5直接移动到程序点1的位置,即可进行下面的作业,从 而提高工作效率。因此,作如下修改:把最终位置的程序点6与最初位 置的程序点1设为同一位置。
4. 按[回车]键,输入程序点4(行0004)。
32
程序点5——不碰触工件、夹具的位置
1. 用轴操作键将机器人移到不碰触工件和夹具的地方。 2. 按[插补方式]键,将插补方式设定为关节插补( MOVJ)。输入缓冲显示行显示如下:
3. 光标在行号0004处时,按[选择]键,此时光标转移到输入缓冲显示行处,继 续按光标键将光标移至设定速度处,然后设定相应的再现速度,设定再现速度 为50%。 4. 按[回车]键,输入程序点5(行0005)。
40
4 再现
4.1 再现前的准备
按下[示教锁定键]解除示教锁定,确认[示教锁定]键上的灯处于熄灭状态。
4.2 再现
1. 2. 3. 确认机器人附近没有人再开始操作。 按下再现操作盒上的[PLAY]键,设定为再现模式。 按下再现操作盒上的[START]键,机器人把示教过的程序再现运行一 次后停止。
RD350安川焊机介绍
RD350 MAG焊接(影像)
以前控制的焊接电源 MAG焊接(影像)
RD350 MAG焊接焊缝外观
搭接 焊接速度70cm/min
1.6t
2.3t
3.2t
搭接 焊接速度90cm/min
1.6t
2.3t
3.2t
以前控制的焊接电源 MAG焊接焊缝外观
搭接 焊接速度70cm/min
1.6t
2.3t
3.2t
搭接 焊接速度90cm/min
3. 产生电弧后开始传送
・大幅度提高电弧的点火(引燃)性能
・在焊接电流较高等的情况时,压扁引燃的电弧, 有产生较多飞溅的情况。
4.机器人指令焊接条件所适应的最佳 加速,从点火(引燃)到焊接的过渡期 由软件控制
减低从起弧到开始后不久的 飞溅
新起弧控制的起弧性能
YASKAWA Robotics Automation Division
搭载无死角的数据库,实现全 领域的最佳化
从小电流到大电流的最佳焊接
19
所体现的从小电流到大电流的最佳焊接(脉冲焊接)
MOTOMAN
堆焊焊缝 板厚:4mm 焊接速度:60cm/min
100A
150A
堆焊焊缝 板厚:6mm 焊接速度:80cm/min
200A
160A
RD350 MAG脉冲焊接 100A → 200A的焊缝外观
焊丝前端以电弧热溶化, 形成液体熔滴。而此熔滴 成为母材的熔池
YASKAWA Robotics Automation Division
RD350
以DSP的高速处理瞬间判断在焊丝 前端熔滴的接触情况,因2次側开关 电路焊接电源快速吸收电弧能源,使 熔滴平稳融入熔池。
安川机器人NX100操教程1

海尚机器人培训SGMOTOMAN第一天1 安全● 1.1 保障安全● 1.2专门培训!强制●示教和维护机器人的人员必须事先经过培训。
●关于培训的更多信息请咨询首钢莫托曼机器人有限公司。
1 安全1.3 机器人使用说明书清单﹗强制●-MOTOMAN-机器人使用说明书●-NX100 使用说明书●-NX100 维护保养●-NX100 操作要领书1 安全1.4 操作人员安全注意事项• 机器人的安装区域内禁止进行任何的危险作业。
●请采取严格的安全预防措施, 在工厂的相关区域内应安放, 如“易燃”、“高压”、“止步”或“闲人免进”等相应警示牌。
●严格遵守下列条款-穿着工作服( 不穿宽松的衣服)。
-操作机器人时不许戴手套。
-内衣裤、衬衫和领带不要从工作服内露出。
-不佩戴大的首饰,如耳环、戒指或垂饰等。
●未经许可的人员不得接近机器人和其外围的辅助设备。
!注意绝不要强制地扳动机器人的轴。
!注意绝不要倚靠在NX100 或其他控制柜上;不要随意地按动操作键。
•在操作期间,绝不允许非工作人员触动NX100。
1 安全● 1.5 机器人的安全注意事项● 1.5.1 安装及配线安全●选择一个区域安装机器人,并确认此区域足够大,以确保装有工具的机器人转动时不会碰着墙、安全围栏或控制柜。
●接地工程要遵守电气设备标准及内线规章制度。
搬运时注意●机器人本体尽可能用天车来搬。
●搬运时尽可能按照机器人出厂姿态,(空间小,绳不会碰到电缆)●起吊NX100 时,请检查下列事项:●如果在安装前需临时保管机器人,则应将其放在稳固的平面上,并采取措施以防非工作人员随意触动。
!注意●确认有足够的空间来维修机器人、NX100 和其它外围设备。
●为了确保安全, 一定要在能看得见机器人的位置进行操作。
●NX100 应安装在机器人动作范围的安全围栏之外。
●针对各种机器人,应按说明书中规定的螺栓大小及类型来安装机器人.!注意●设定后将NX100 的位置固定。
●为NX100 配线前须熟悉配线图,配线须按配线图进行。
安川机器人操作及编程简易教程

3.2.2 示教
程序是把机器人作业内容用机器人语言加以描述的作业 程序。以下为机器人输入从工件A点到B点的加工程序, 此程序由1~6的6个程序点组成。
Hi-P International Limited ? 2011
CONF 10
NTIAL 程序点1——开始位置
NFIDE O
移动到完全离开机器人周边物体的位置输入程序点1。
CONF 7
NTIAL
NFIDE O
3.1.3 关于移动命令与程序点
C
1. 运动命令
为了使机器人能够进行再现,就必须把机器人运动 命令编成程序。控制机器人运动的命令就是移动命令。 在移动命令中记录有移动到的位置、插补方式、再现速 度等。因为XRC使用的INFORM II语言主要的移动命令 都以“MOV”来开始,所以也把移动命令叫做“MOV”命 令。
C
1. 握住安全开关,接通伺服电源,机器人进入可动作状态。
2. 用轴操作键把机器人移动到适合作业的位置点1。
3. 按[插补方式]键,把插补方式定为关节插补。输入缓冲行中以MOVJ 表示关节插补。
4. 光标在行号0000处时,按[选择]键,此时光标转移到 输入缓冲显示行处,继续按光标键将光标移至设定速度 处,然后设定相应的再现速度,设定再现速度为50%。
?接通电源 ?示教:教机器人工作。 ?再现:机器人执行示教的工作。 ?切断电源 基本工作过程可以用下图说明:
Hi-P International Limited ? 2011
CONF 3
NTIAL
NFIDE O
注意:接通电源时,请务必按照先开主电源再开伺服电
C 源的顺序。接通电源前,必须充分确认机器人周围是否
安全。
安川机器人点焊焊接参数
安川机器人点焊焊接参数
安川机器人是一种多功能的机器人,可以有效的完成焊接工作。
安川机器人点焊焊接
时需要设置参数,下面是一些常见的中文参数设置。
1. 电流:电流是焊接过程中一个非常重要的参数。
电流大小和焊接时间一起决定焊
接的强度和质量。
一般来说,通常使用的焊接电流在100-500A之间。
如果焊接零件太薄或太脆,电流要适当降低。
如果焊接很厚或焊接速度较慢,电流要适当提高。
2. 电极压力:电极是焊接的一个重要部分,电极的良好接触可以保证焊接的效果。
电极压力一般为2-10Kg之间。
如果焊接零件很厚或高温,电极压力要适当降低,如果焊接零件很薄,电极压力不要过大。
3. 电极直径:电极直径是定点焊接一个重要参数。
电极直径和焊接电流和焊接时间
联系紧密。
一般来说,焊接电流越大,焊接时间越长,电极直径越粗。
如果焊接零件很大,电极直径可以适当增大。
如果焊接零件很小,电极直径要适当减小。
5. 焊接速度:焊接速度决定了焊接质量和效率。
焊接速度太快质量不好,焊接速度
太慢效率低。
一般来说,焊接速度可以根据焊接材料和焊接零件来调节,焊接越难焊接速
度越慢。
总之,安川机器人点焊焊接参数的设置是一个非常重要的环节,不同的焊接材料和焊
接零部件需要不同的参数。
需要我们根据具体的情况,进行合适的调节。
安川机器人操作和简单故障处理

安川机器人操作及简单故障处理一.机器人简介1、硬件构成:我公司二期所用的日本安川公司机器人共有15 台,全部为MOTOMAN系列产品,共有SK120,SK6,SV3及UP6四种型号。
四种型号的机器人都是由机器人本体,控制柜两部分构成。
机器人本体上装有伺服马达,传动机构及减速机构等机械装置。
这几种型号的机器人都是有六个轴关节,由六台伺服马达和六套传动机构组成。
六个轴的名称分别为S、L、U、R、B、T轴,其中S轴控制整个本体的来回旋转、L轴控制机器人下臂的前后摆动、U轴控制机器人上臂上下摆动、R轴控制上臂的来回旋转、B轴控制机器人手腕的上下摆动、T轴控制手腕的来回旋转。
六个马达共同运动可以使机器人运行到其工作范围内的任意的一个空间位置。
控制柜内装有全部控制装置、再现操作盒及示教盘。
控制装置包括主计算机(CPU单元),伺服马达驱动器,各种外部信号输入输出板,电源装置等。
此系列机器人电源的额定输入为AC220V 50/60HZ三相电源,在国内使用时必须配备电源变压器。
再现操作盒上装有各种操作按纽、指示灯及通讯口等装置。
示教盘上有液晶显示器和各种操作按纽,主要用于编写程序、操作机器人及观察其工作状况等。
2、机器人工作方式:机器人的工作方式为示教再现型,即由操作者操作机器人完成一遍所有的预定动作,机器人记录下所走过各个位置点的坐标随后自动运行中按照示教的位置、速度完成所有动作。
机器人运动时的坐标系统有五个分别为:关节坐标系、直角坐标系、圆柱坐标系、工具坐标系和用户坐标系。
机器人在关节坐标系中运动方式为各轴单独运动互不影响;在直角坐标系中机器人以本体轴的X、Y、Z三个方向平行移动;在圆柱坐标系中机器人以本体轴Z轴为中心回旋、直角或平行移动;在工具坐标系中机器人以工具尖端点的X、Y、Z 轴平行移动;在用户坐标系中由用户在机器人工作的范围之内任意设定不同角度的X、Y、Z轴,机器人可延所设的各轴平行移动。
二.机器人的操作和程序的编写1、再现操作盒操作键说明:见P2-32、示教盘操作键说明:见P2-63、程序结构说明:机器人的程序语言为安川公司自己开发的专用语言(INFORM II),其指令主要分为移动指令、输入输出指令、控制指令和平移指令、运算指令等。
MOTOMAN点焊机器人_使用说明书_中文
安全注意事项使用前(安装、运转、保养、检修),请务必熟读并全部掌握本说明书和其他附属资料,在熟知全部设备知识、安全知识及注意事项后再开始使用。
本说明书中的安全注意事项分为“危险”、“注意”、“强制”、“禁止”四类分别记载。
即使是属于“注意”类的事项,也会因情况不同而产生严重后果,故任何一条“注意”事项都极为重要,请务必严格遵守。
.误操作时有危险,可能发生死亡或重伤事故。
误操作时有危险,可能发生中等程度伤害、轻伤事故或物件损坏。
必须遵守的事项禁止的事项虽然不符合“注意”或“危险”的内容,但为了确保安全和有效的操作,用户也必须遵守的事项,将会在相关处加以叙述。
本书常用词汇定义“MOTOMAN”是安川电机工业机器人的商品名。
MOTOMAN由机器人本体“机器人”、机器人控制柜“NX100”、“NX100示教编程器”和“供电电缆”构成。
在本书中,这些部分如下表表示。
设 备本 书 表 示 法NX100控制柜NX100NX100示教编程器示教编程器机器人与控制柜间的电缆供电电缆另外,示教编程器的键、按钮、画面的表示方法如下所示:操作步骤的表达方式的定义操作步骤的说明中,“选择 • • • ”表示的操作方法,是把光标移到选择对象上,再按[选择]键。
或者是使用触摸屏直接触摸画面选择项目。
警示牌的说明下列警示牌牌贴在机器人及NX100上。
要完全遵照警示牌执行。
1简介2移动命令2.1命令的登录 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-1 3前进/后退操作4SVSPOTMOV(间隙动作)命令4.1命令的登录 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-1 5空打命令5.1命令的登录 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-25.2磨损检测命令(WEAR). . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-45.3修磨命令(CHIPDRS). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-55.4工件把持命令(WKHLD-ON) . . . . . . . . . . . . . . . . . . . . . . . .5-55.5工件放开命令(WKHLD-OF) . . . . . . . . . . . . . . . . . . . . . . . .5-55.6修磨判断命令(DRSCHK、B3线以后可以使用). . . . .5-65.7修磨条件文件(B3线以后可以使用). . . . . . . . . . . . . . . .5-7 6焊钳更换6.1焊钳更换的设定. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-16.2焊钳更换命令(GUNCHG) . . . . . . . . . . . . . . . . . . . . . . . . .6-36.3手动更换焊钳. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-4 7焊钳轴动作7.1加压动作 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7-17.2打开动作 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7-18焊接结束解除9根据示教位置的数值输入进行编辑 (NC定位装置)9.1位置修正画面的显示. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9-19.2位置的修正. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9-2 10作业原点信号输出设定10.1作业原点的登录. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10-2 11磨损检测基准位置/限定值设定11.1磨损检测基准位置登录. . . . . . . . . . . . . . . . . . . . . . . . . . .11-111.2磨损量限定值设定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-2 12焊钳特性文件12.1解除加压力 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12-112.2接触速度. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12-3 13主程序的设定13.1主程序的登录. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .13-213.2循环周期的登录. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .13-4 14位置等级(PL)14.1位置等级(PL)的设定 . . . . . . . . . . . . . . . . . . . . . . . . . .14-1 15速度调节功能15.1速度调节功能的设定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15-116输入信号解除16.1输入信号解除步骤. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .16-1 17碰撞检出偏移量17.1操作步骤. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17-117.2说明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17-217.3功能说明. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17-2 18省电功能(B3线以后可以使用)18.1省电时间的设定. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18-118.2省电种类. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18-1等待主程序的启动信号 . . . . . . . . . . . . . . . . . . . . . . . . . . . .18-1自动运行中的待机状态 . . . . . . . . . . . . . . . . . . . . . . . . . . . .18-31简介本说明书对马自达式样NX100和标准式样NX100的差异部分进行了说明。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.2.3 坐标类型有下列坐标类型用于操作机械手●关节坐标机械手的每一根轴相互独立运动。
●直角坐标与机械手的位置无关,它平行于X轴,Y轴,Z轴中的任意一轴运动。
●用户坐标机械手平行于用户坐标轴运动。
在任何一坐标系中,在固定的工具中心点(TCP: tool center point)的位置,只可能改变手腕方向。
这就叫做TCP固定功能。
3.1 机械手的运动通常用两种坐标来操作机械人:关节坐标和直角坐标。
按示教盒上的坐标轴操作键,操作机械手的每一根轴。
3.1.1 关节坐标3.1.2 直角坐标3.1.3 运动指令和步骤机械手使用作业指令来实现运动和执行再现,这些指令叫做运动指令。
目的位置,插补方法,运行速度等等信息都记录在运动指令中。
叫做运动指令的原因是,主体指令都是以“MOV”开始。
“MOV”是一种用于XRC 系统中的“INFORM Ⅱ”语言。
比如:MOVJ VJ=50.00MOVL V=1122 PL=1从一条运动指令到下一条运动指令为一步。
步骤1为001,步骤2为002,步骤3为003,等等。
步骤1的位置即为记录有步骤号001(S: 001)的运动指令处的位置。
例如:参照下面的作业的内容,当执行再现时,机械手由步骤1向步骤2运动,运动速度记录在步骤2的运动指令中。
在机械手到了步骤2之后,机械手执行TIMER指令,再执行DOUT指令,然后继续执行步骤3。
3.2 示教3.2.1 示教前的准备工作示教前应做下面准备工作:●按下再现面板上的[REMOTE]按钮,使灯灭●按下[TEACH] 按钮(在面板上),设置示教模式●按下[TEACH LOCK]键(在示教盒上),锁住示教模式(示教锁,确保安全)●输入作业名称1)确保再现面板上的[REMOTE]按钮没有点亮了,如点亮了,按下[REMOTE]按钮关掉,这样再现面板就可以操作了。
灯亮——遥控操作灯灭——本地面板操作2)在再现面板上,按下[TEACH]按钮进入示教模式。
3)按下[TEACH LOCK]键。
如果按下[TEACH LOCK]键,该按钮将点亮。
这样一来,通过再现面板或外部输入设备,就不能改变操作模式和操作过程。
另外,如果[TEACH LOCK]键没有点亮,使用紧急制动开关,不能开启伺服电源。
4)在顶部菜单中选择{JOB},并在子菜单中选择{CREATE NEW JOB}。
这时将显示输入行。
5)在显示了新的作业后,按[SELECT]键。
6)在这个例子中,作业的名字叫“TEST”,请用翻页键显示字母符号页。
7)移动光标到“T”,按[SELECT]键,“E”,“S”,和“T”类推。
8)按[ENTER]键确认。
9)移动光标至“EXEC”处,按[SELECT]键,这样,作业名“TEST”将存储在XRC系统,并且作业内容被显示出来,自动显示NOP 和END指令。
能用于作业名的字符作业名必须由数字、字母、或已注册的其他字符。
在5和6步之间,当按翻页键时,将依次显示所有字符。
名字可用8位数字、字母、符号来表示。
3.2.2 示教作业示教作业是一种工作程序,它表示机械手将要执行的任务。
程序是用机械人编程语言“INFORM Ⅱ”来创建的。
下面的例子将说明如何使机械手学会要做的事情。
如下图所示,这个例子说明让机器人从工件的A点运动到B点所需要的步骤。
完成这个作业总共需要6步。
路径确认使第一步与最后一步重合记录每一步骤安全检查确保了锁住了示教模式确保你和机械手之间要有安全的距离步骤1——开始位置始终要注意,机械手在操作前确保有一个安全的工作区域。
1)握紧手握急停开关,这时伺服电源打开,机械手可以操作了。
2)按轴操作键,移动机械手到预期的位置,要确保位置安全,并且使工作区域适合于作业编程。
3)用[MOTION TYPE]键选择关节运动方式,使关节运动指令“MOVJ”显示在输入窗口中。
= > MOVJ VJ=0.784)移动光标到行数0000处,按下[SELECT键。
J: TEST S:000 R1 TOOL: *0000 NOP0001 END5)在输入窗口中,将光标移至右边的VJ=*.**处,该处表示速度,然后按住[SHIFT]键,同时上下移动光标键(改变作业再现速度),直到得到合= > MOVJ VJ=50.001(行号0001)。
0000 NOP0001 MOVJ VJ=50.000002 END步骤2——靠近开始作业位置首先调整机械手的工作姿态1)用轴操作键将机械手移至接近开始作业的位置。
2)按确认键[ENTER] ,记录下步骤2(行号0002)。
0000 NOP0001 MOVJ VJ=50.000002 MOVJ VJ=50.000003 END步骤3——开始作业位置按照步骤2的姿势,将机械手移至开始作业的位置。
1) [FST]或[SLW]键得到一个中等速度,状态区中的速度图标显示为形状。
2)不要改变步骤2中的姿势,按[COORD]键选择直角坐标,用坐标轴操作键将机械手移至开始焊接点。
3)将光标移到行号0002处,按[SELECT]键。
4)在输入窗口中,将光标移至右边的VJ=*.**处,该处表示速度,然后按住[SHIFT]键,同时上下移动光标键(改变作业再现速度),直到得到合适的速度。
将速度设为12.50%。
= > MOVJ VJ=12.505)按确认键[ENTER] ,记录下步骤3(行号0003)。
0000 NOP0001 MOVJ VJ=50.000002 MOVJ VJ=50.000003 MOVJ VJ=12.500004 END●步骤4——作业结束点指定作业结束点1)用坐标轴操作键将机械手移至工作结束点。
2)按[MOTION TYPE]键,选择直线运动类型(MOVL)。
= > MOVL V=663)将光标移至行号0003,并按[SELECT]键。
= > MOVL V=664)在输入窗口中,将光标移至右边的V=*.**处,该处表示速度,然后按住[SHIFT]键,,直到得到合适的速度。
将速度设为138cm/min。
= > MOVL V=1385)按确认键[ENTER] ,记录下步骤4(行号0004)。
0000 NOP0001 MOVJ VJ=50.000002 MOVJ VJ=50.000003 MOVJ VJ=12.500004 MOVL V=1380005 END●步骤5——离开工件和夹具位置将机械手移至一个不会撞击工件或夹具的位置。
1)按[FST]或[SLW]键,将速度改为高速。
注意:该速度只影响示教速度,再现速度由步骤4定义。
2)用坐标轴操作键将机械手移至一个不会撞击夹具的位置。
3)按[MOTION TYPE]键设置节点运动类型[MOVJ]。
= > MOVJ VJ=12.504)将光标移至行号0004处,按[SELECT]。
= > MOVJ VJ=12.505)在输入窗口中,将光标移至右边的VJ=*.**处,该处表示速度,然后按住[SHIFT]键,同时上下移动光标键(改变作业再现速度),直到得到合适的速度。
这里将速度设为50%。
= > MOVJ VJ=50.006)按确认键[ENTER],记录下步骤5(行号0005)。
0000 NOP0001 MOVJ VJ=50.000002 MOVJ VJ=50.000003 MOVJ VJ=12.500004 MOVL V=1380005 MOVJ VJ=50.000006 END步骤6——接近开始点将机械手移至接近开始点1)用坐标轴操作键将机械手移至接近开始点。
2)按确认键[ENTER] ,记录下步骤6(行号0006)。
0000 NOP0001 MOVJ VJ=50.000002 MOVJ VJ=50.000003 MOVJ VJ=12.500004 MOVL V=1380005 MOVJ VJ=50.000006 MOVJ VJ=50.000007 END确保第一步和最后一步一致机械手在步骤6就停了,步骤6必须与步骤1十分接近。
最好是直接从步骤5的端点位置移至步骤1,这样机械手可以很快有效地开始下一个焊接作业。
下面的操作将使步骤6(结束点)和步骤1(开始点)一致。
1)将光标移至步骤1(行号0001)。
2)按[FWD]键,机械手将移至步骤1。
3)将光标移至步骤6(行0006)。
4)按[MODIFY]键。
5)按确认键[ENTER]。
这样就能将步骤6的位置改为与步骤1的位置相同。
小结与提高1)步骤:手握开关打开伺服电源→移动到位→选择运动指令形式→修改速度→确定;2)坐标类型切换[COORD];3)运动指令形式切换:[MOTION TYPE];4)修改任一行的再现运动速度;1°光标移到修改行的指令处2°按下[SELECT],把这一行移到输入缓冲行3°把光标移到VJ=xx.xx处按[SELECT]键,系统出现提示符,输入新的速度值或者按[SHIFT]+光标键,修改速度值4°[ENTER]确认5)修改任一行的运动指令;1°把光标移到修改行,再移到指令处,2°按[SELECT]3°按住SHIFT键+光标键,改变运动指令4°[ENTER]键确认3.2.3 路径确认作业编程完成时,要分别检查每一步,确保没有问题。
1)将光标移至步骤1(行0001)。
2)按[FST]或[SLW],使速度改为中等速度。
3)按[FWD]键,确认机械手执行的每一步,每当按下[FWD]键,机械手就移动一步。
4)逐步完成路径检查后,将光标移至作业开始处(0001行)。
5)同时按住[INTER LOCK]键和[TEST START]键,连续地执行所有步骤。
机械手连续走完所有步骤,直到循环结束时为止。
3.2.4 修改一个作业注意:在修改作业后,需要重新确认路径。
修改作业之前确认机械手每一步的运动。
如果需要调整作业位置,增减步骤,首先要按下面步骤显示作业内容。
在顶部菜单中选择{JOB},并选择子菜单中的{JOB}项。
确保已打开示教模式。
●改变位置数据例:改变步骤2中的位置数据。
1)按[FWD]键,将机械手移至步骤2(0002行);2)用坐标轴操作键,将机械手移至调整位置;3)按[MODIFY]键;4)按确认键[ENTER],即可改变步骤2中的位置数据。
●增加步骤在步骤5和步骤6之间增加一个新的步骤。
1)按[FWD]键将机械手移至步骤5(0005行);2)用坐标轴操作键,将机械手移至希望插入的作业位置;3)按[INSERT]键;4)按确认键[ENTER]键,即可插入该步骤。
当增加完步骤后,行数将会自动调整。
●删除一个步骤删除刚才增加的那个步骤1)用[FWD]键将机械手移至步骤6(0006行);2)确认光标在想删除的步骤上,然后按[DELETE]键;3)按确认键[ENTER],即可删除这一步。