2.STM32控制舵机方法
stm32控制舵机程序
stm32控制舵机程序章节标题:基于STM32的舵机控制程序设计第一章:引言(约250字)1.1 研究背景控制舵机是机器人、无人机、航空模型等众多领域的关键技术之一。
而STM32系列的微控制器以其高性能、低功耗和丰富的外设资源被广泛应用于嵌入式控制系统。
本章主要介绍了舵机的作用及其在控制系统中的重要性,同时说明了选择STM32微控制器作为控制舵机的硬件平台的原因。
第二章:控制理论(约250字)2.1 舵机原理舵机是一种能够根据外部输入信号控制角度的电动执行器。
其通过接收PWM信号来确定输出位置和角度,通常在0至180度之间运动。
本章介绍了舵机的工作原理,包括PWM控制信号的作用、舵机内部的反馈控制电路等内容。
2.2 PID控制理论PID控制是一种常用的闭环控制方法,能够根据反馈信号调整输出信号,通过比较实际输出与期望输出的差异来实现控制。
本章详细介绍了PID控制的原理和算法,并提出了使用PID控制舵机的基本思路。
第三章:硬件设计(约250字)3.1 系统框架在舵机控制系统中,使用STM32微控制器作为控制芯片,通过引脚与舵机进行连接,实现对舵机的控制。
本章主要介绍了硬件设计的系统框架,包括STM32微控制器的选择、电源设计、信号输入输出设计等。
3.2 电路原理图本章详细描述了电路原理图设计,包括电源管理模块、驱动电路等详细设计内容。
同时对于舵机的接线方式和引脚定义进行了说明。
第四章:软件设计(约250字)4.1 程序流程本章介绍了在STM32上开发舵机控制程序的流程,包括初始化舵机控制模块、设置PWM输出引脚、编写控制算法等。
4.2 PID算法实现详细描述了如何在STM32上实现PID控制算法,包括参数调整、误差计算、控制输出计算等步骤。
同时,结合实际舵机控制需求,对PID控制算法进行优化。
4.3 实验验证通过实验验证了基于STM32的舵机控制程序的有效性和性能优势。
通过与传统控制方法进行对比,并分析实验数据,评估了该程序的稳定性和响应速度。
STM32控制舵机的原理及代码

STM32控制舵机的原理及代码1、舵机的⼯作原理:舵机内部的控制电路,电位计(可变电阻器)和电机均被连接到电路板上,如内部结构图的右边部分。
控制电路通过电位计可监控舵机的当前⾓度。
如果轴的位置与控制信号相符,那么电机就会关闭。
如果控制电路发现这个⾓度不正确,它就会控制马达转动,直到它达到指定的⾓度。
舵机⾓度根据制造商的不同⽽有所不同。
⽐如,⼀个180度的舵机,它可以在0度⾄180度之间运动。
由于限位装置被安装在主输出装置上,超出这个范围机械结构就不能再转动了。
舵机的输出功率与它所需要转动的距离成正⽐。
如果输出轴需要转动很长的距离,马达就会全速运转,如果它只需要短距离转动,马达就会以较慢的速度运⾏,这叫做速度⽐例控制。
2、如何让舵机转到指定⾓度:控制线⽤于传输⾓度控制信号。
这个⾓度是由控制信号脉冲的持续时间决定的,这叫做脉冲编码调制(PCM)。
舵机的控制⼀般需要⼀个20ms左右的时基脉冲,该脉冲的⾼电平部分⼀般为0.5ms-2.5ms范围,总间隔为2ms。
脉冲的宽度将决定马达转动的距离。
例如:1.5毫秒的脉冲,电机将转向90度的位置(通常称为中⽴位置,对于180°舵机来说,就是90°位置)。
如果脉冲宽度⼩于1.5毫秒,那么电机轴向朝向0度⽅向。
如果脉冲宽度⼤于1.5毫秒,轴向就朝向180度⽅向。
以180度舵机为例,对应的控制关系是这样的:0.5ms————-0度;1.0ms————45度;1.5ms————90度;2.0ms———–135度;2.5ms———–180度;3、舵机转动⾓度对应的占空⽐以及⽐较寄存器的值计算⽅法:舵机配置需要满⾜频率为50HZ,PWM占空⽐是指在⼀个周期内,信号处于⾼电平的时间占据整个信号周期的百分⽐,由于PWM周期为20ms,所以(以舵机会转动 45°为例),占空⽐就应该为1ms/20ms = 5%,所以TIM_SetCompare1的 TIMx 捕获⽐较 1 寄存器就为200-200*5% = 1904、STM32控制舵机的代码:控制舵机代码:Main.cpp#include "sys.h"#include "delay.h"#include "usart.h"#include "led.h"#include "timer.h"int main(void){u16 led0pwmval=185;//u8 dir =1;delay_init();LED_Init();TIM3_PWM_Init(199, 7199);//50hzwhile(1){led0pwmval=195;//45TIM_SetCompare2(TIM3,led0pwmval); delay_ms(800);led0pwmval=190;//45TIM_SetCompare2(TIM3,led0pwmval); delay_ms(800);led0pwmval=185;//90TIM_SetCompare2(TIM3,led0pwmval); delay_ms(800);led0pwmval=180;//135TIM_SetCompare2(TIM3,led0pwmval); delay_ms(800);led0pwmval=175;//180TIM_SetCompare2(TIM3,led0pwmval); delay_ms(800);}}Timer.h#ifndef __TIMER_H#define __TIMER_H#include "sys.h"void TIM3_PWM_Init(u16 arr , u16 psc);#endifTimer.c#include "timer.h"void TIM3_PWM_Init(u16 arr , u16 psc){GPIO_InitTypeDef GPIO_InitTypestrue;TIM_TimeBaseInitTypeDef TIM_TimeBaseInitTypestrue;TIM_OCInitTypeDef TIM_OCInitTypesture;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_AFIO,ENABLE);//使能GPIO时钟,以及TIM3时钟使能GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3,ENABLE);//复⽤GPIO_InitTypestrue.GPIO_Mode=GPIO_Mode_AF_PP;GPIO_InitTypestrue.GPIO_Pin=GPIO_Pin_5;GPIO_InitTypestrue.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOB,&GPIO_InitTypestrue); //GPIO初始化TIM_TimeBaseInitTypestrue.TIM_Period=arr;TIM_TimeBaseInitTypestrue.TIM_Prescaler=psc;TIM_TimeBaseInitTypestrue.TIM_CounterMode=TIM_CounterMode_Up;TIM_TimeBaseInitTypestrue.TIM_ClockDivision=TIM_CKD_DIV1;TIM_TimeBaseInit(TIM3 ,&TIM_TimeBaseInitTypestrue); //定时器初始化TIM_OCInitTypesture.TIM_OutputState=TIM_OutputState_Enable;TIM_OCInitTypesture.TIM_OCMode=TIM_OCMode_PWM2;TIM_OCInitTypesture.TIM_OCPolarity=TIM_OCPolarity_High;TIM_OC2Init(TIM3 ,&TIM_OCInitTypesture );//CH2通道初始化TIM_OC2PreloadConfig( TIM3 ,TIM_OCPreload_Enable);//使能预装载寄存器TIM_Cmd(TIM3,ENABLE);}。
舵机(servo motor)的控制
舵机(servo motor)的控制基于单片机16f877a和proteus的仿真舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。
(注意:如果你控制的舵机在不停的抖动,其中一个原因就是你给的脉冲有杂波,这点很重要。
舵机是一个物理器件,它的转动需要时间的,因此,程序中占空比的值变化不能太快,不然舵机跟不上程序的响应时间。
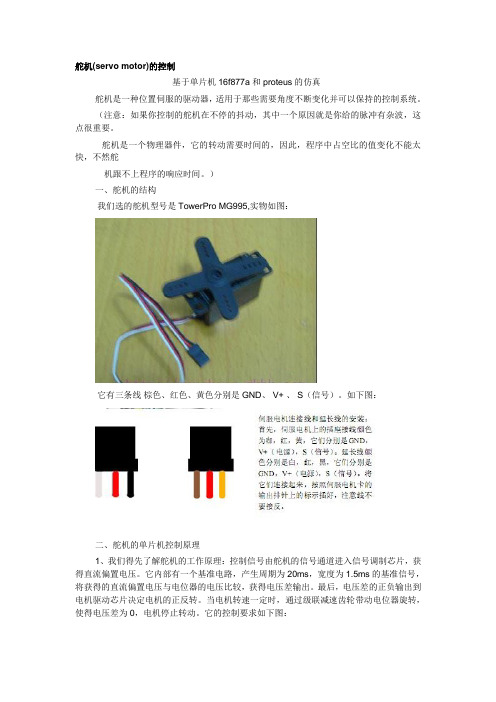
)一、舵机的结构我们选的舵机型号是TowerPro MG995,实物如图:它有三条线棕色、红色、黄色分别是GND、 V+ 、 S(信号)。
如下图:二、舵机的单片机控制原理1、我们得先了解舵机的工作原理:控制信号由舵机的信号通道进入信号调制芯片,获得直流偏置电压。
它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
它的控制要求如下图:2、由上可知舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。
我们用pic单片机的定时器1模块产生PWM信号,得到控制电机的占空比,也就如上图的占空比信号,周期是20Ms.下面我们来看看怎样产生上图的占空比,单片机的定时器1模块最大可以产生174ms的延时,也就是可以产生最大174ms的中断。
怎样设置Timer1来产生上述占空比的中断,可以参考具体资料书。
当系统中只需要实现一个舵机的控制,采用的控制方式是改变单片机的一个定时器中断的初值,将20ms分为两次中断执行,一次短定时中断和一次长定时中断。
这样既节省了硬件电路,也减少了软件开销,控制系统工作效率和控制精度都很高。
具体的设计过程:例如想让舵机转向左极限的角度,它的正脉冲为2ms,则负脉冲为20ms-2ms=18ms,所以开始时在控制口发送高电平,然后设置定时器在2ms 后发生中断,中断发生后,在中断程序里将控制口改为低电平,并将中断时间改为18ms,再过18ms进入下一次定时中断,再将控制口改为高电平,并将定时器初值改为2ms,等待下次中断到来,如此往复实现PWM信号输出到舵机。
基于STM32的机械手臂控制系统设计

图2 . 1机械臂控制 系统结构
该系 统是通 过 计算 机 的事先 的编程 之后 ,通 过 数据 传输 下载 到 s t m3 2 当中通 过控f l i J  ̄ s t m3 2 的定 时器 产生 多路 的P WM波 。舵机 就会 依 据 给定 的P WM波 完成相 应 的运 动轨迹 或按照 预定 的计划完 成任务 。 2 . 3 机械臂 的臂部 设计 因为机 械臂 主 要是 由臂 部组 成 ,所 以在进 行 臂部 设计 时应 当 着 重 注 意 以下 几 点 : ( 1 )手臂 在机 械 臂 中起 着 重要 的作 用 :它 不光 可 以 让物 体 进行 移 动而 且 还 能进 行 一些 操 作 。 ( 2 )因 为机 械 臂 的 臂 部在 运动 中有 很大 负担 ,为 了减小 手臂 的 负担 ,需要 将手 臂 的截 面 形状 做 的更加 合理 。在 进 行 了各种截 面 对弯 曲度 的承 受力 的实验 后 发现 ,在 相 同力 的情况 下 ,工字 型 的截 面 能承受 的力 最大 ,因此 我 选择 使 用工 字 型截 面 做手 臂 的 截面 。 ( 3 )因为 机械 臂 在 直 线运 动 中可 能会 发生 突然 的方 向转 换 , 因此 ,为 了防止 机械 臂 的硬 件损 耗过 大 ,需要 采 用一 些装置 来 保护 机械 臂 。 同时要 采用 一定 形 式 的 缓冲 措 施 。 ( 4 )为 了减 少 臂 部在 运 动时 会产 生 较 大 的转 动惯 量 , 需要 将臂 部 的重量 减少 ,以免 在运 动 中产生 较 大 的误差 ,从 而影 响 机 械 臂 的整 体 运作 ,加 快机械 臂 的运行 速度 。 经过对预期任务 的特点和类型分析,该设计 需要机械臂具有较高 的 灵 活性和流畅性 ,因此在 多次 的比较和分析后 ,决定使用 多关节型机械 臂 。它不仅可 以灵活的完成预定任务 ,而且可以有更大 的运动空间 。 2 . 4 机械臂 自由度选择 通 常将机械 臂是 由几个 传动结 构组成 的就称为几 自由度 。例如人 类 的 自由度高 达2 7 个 ,而 手臂 部分 的 自由度 一般 为6 自由度 。所 以仿 照 人类 的特性 ,机械 臂 的 自由度 应 当选为6 自由度 ,这 样 既符合 了身 体力 学并且动 力传输 效率也很 高 。为 了更加流 畅的完成抓 取物体 ,并 将物体 移动到 指定 的位置 , 需要 采用6 自由度 。而 6 自由度 的机械 臂的 控制较为 繁琐,所 以工 业和生活 中机械 臂的 自由度 多少 于6 个。 2 . 5 机 械臂 控 制器类 型 控制 器 的主 要任 务就 是按 照预 先 设计 的程 序进 行相 应 的任 务 , 它是 机械 臂 中十 分重 要 的组件 。机 械臂 的控制 器就 相 当于 电脑 中 的 处理 器 ,只有 处 理器越 好 , 电脑 的运行 速度 和 处理 速度 才会 越 快 。 对 于 机械 臂来 说 也一样 ,只有 控制 器越 好 ,才 能更 加精 准快 速 的进 行控 制 。从控 制器 的数 量 和机 械臂 的控 制 方式 可分 为 以下几 种 :单
舵机的单片机控制

舵机的单片机控制第一章:引言舵机是一种常见的机械驱动器件,广泛应用于模型航空、机器人、自动化设备以及家用电器等领域。
其具备精准控制旋转角度的能力,可以根据输入的信号控制输出轴的位置,使其按照预定的角度旋转。
单片机技术作为现代控制系统中重要的组成部分,被广泛应用于舵机控制中,本文将以单片机控制舵机为研究对象,探讨其工作原理和控制方法。
第二章:舵机原理舵机由电机和返回电路组成,输入控制信号后,通过电机驱动轴实现角度调节。
其内部包含了一个减速装置以及一个位置反馈装置(旋转电位器或磁编码器)。
通过控制电机的转速和方向,从而实现舵机输出轴的位置调整。
值得注意的是,舵机的控制信号通常为PWM信号。
第三章:单片机控制舵机3.1 舵机控制信号的生成单片机通过PWM信号控制舵机的角度。
PWM信号可以通过计时器/计数器来生成,并通过定时器的频率和占空比来控制输出信号的特性。
其中,舵机的控制信号通常具有20ms的周期,占空比在0.5ms到2.5ms之间可以实现0°到180°的转动范围。
因此,单片机需要根据需要设定合适的定时器参数。
3.2 单片机舵机控制电路单片机与舵机之间需要一个适配电路,将单片机输出的PWM信号转化为舵机可以接受的信号。
适配电路通常由操作放大器、电阻和电容组成。
其作用是将较低电平的单片机信号放大到舵机所需要的电平范围,以便舵机可以接收到正确的控制信号。
3.3 程序设计程序设计是单片机控制舵机的关键。
根据舵机的控制信号特性,通过适当的算法和参数设置,可以实现精确的舵机控制。
程序设计需要考虑到舵机控制的实时性和精确性,采用中断方式和定时器中断来实现。
第四章:舵机控制实验为验证单片机控制舵机的效果,进行了一系列实验。
实验中通过改变PWM信号的占空比以及角度范围,观测舵机输出的转动情况。
实验结果表明,单片机可以精确控制舵机的转动角度,并具备实时性能。
第五章:结论单片机控制舵机是一种成熟且常见的应用。
单片机控制舵机程序
单片机控制舵机程序第一章:引言单片机作为一种重要的嵌入式系统开发工具,广泛应用于各个领域,舵机作为一种常用的机械驱动装置,也在各种应用中得到广泛的应用。
本论文通过设计单片机控制舵机的程序,旨在探究单片机如何通过编程实现舵机的精确控制。
第二章:舵机的基本原理舵机是一种常见的位置式伺服机构,它可以通过控制信号控制其角度位置,实现精确的运动控制。
它由直流电机、减速机构、位置检测传感器和驱动控制电路组成。
通过单片机控制舵机,可以实现根据需要精确调整舵机的位置和速度。
第三章:单片机控制舵机的设计与实现本章主要介绍如何使用单片机来控制舵机。
首先,需要选择合适的单片机和舵机。
常见的单片机有51系列、AVR、STM32等,而舵机则有舵机舵盘、舵机电机和舵机控制器等。
随后,在硬件设计上,需要连接单片机和舵机,并根据舵机的电气特性设计相应的电路保护措施。
在软件设计上,需要编写单片机的控制程序。
通过控制程序发送特定的PWM(脉宽调制)信号给舵机,从而控制舵机的角度位置和运动速度。
第四章:单片机控制舵机的应用与改进在本章中,将介绍单片机控制舵机的应用与改进。
首先,在机器人领域,单片机控制舵机可以实现机器人的运动与动作控制,从而实现更复杂的功能。
其次,在航模、智能家居等领域,单片机控制舵机也应用广泛,可以实现遥控、智能调节等功能。
最后,对现有的单片机控制舵机的程序进行改进,如优化舵机的运动曲线、增加舵机的控制精度等,可以提升系统的性能。
总结:本论文通过设计单片机控制舵机的程序,探究了单片机通过编程实现舵机的精确控制的原理和方法。
同时,介绍了舵机的基本原理和单片机控制舵机的设计与实现过程,并讨论了单片机控制舵机的应用与改进。
通过本论文的研究,可以帮助读者了解和应用单片机控制舵机的技术,为单片机在舵机控制方面的应用提供参考。
第五章:实验及结果分析在本章中,我们将介绍根据上述设计和实现的单片机控制舵机的程序的实验,并对实验结果进行分析。
舵机怎么控制

舵机怎么控制舵机的控制是机器人控制中非常重要的一部分。
舵机可以通过向机器人的连接部件施加力矩,从而控制其运动和姿态。
本论文将分为四个章节,分别介绍舵机的工作原理、舵机的控制方式、舵机的应用和未来的趋势。
第一章:舵机的工作原理舵机是一种通过转动轴来控制输出角度的电动装置。
它由电机、减速器和控制电路组成。
当电机转动时,减速器将输出转矩传递给连接部件,使其移动到所需的位置。
舵机的工作原理基于反馈控制系统,其中控制电路通过传感器准确测量当前位置,并根据设定值产生控制信号,使舵机转动到精确的角度。
第二章:舵机的控制方式舵机的控制方式主要有两种:开环和闭环控制。
开环控制是指通过简单的控制信号来直接控制舵机。
这种控制方式简单易行,但可控性较差,难以精确控制舵机的输出角度。
闭环控制是指通过反馈信号来实时调整控制信号,使舵机精确转动到所需的位置。
闭环控制具有较高的控制精度,但也更加复杂,需要使用传感器来获取反馈信号。
第三章:舵机的应用舵机广泛应用于机器人、航空航天、航海、汽车和工业自动化等领域。
在机器人领域,舵机用于控制机器人的关节运动,使其具备更加精确和灵活的动作能力。
在航空航天领域,舵机用于控制飞行器的姿态和稳定性,确保飞行器在空中的平稳飞行。
在航海领域,舵机用于控制船舶的航向,使船舶能够准确地按照预定航线行驶。
在汽车领域,舵机用于控制汽车的转向,使驾驶人能够轻松操作车辆。
在工业自动化领域,舵机用于控制机械臂和其他运动装置的运动,实现精确的运动控制。
第四章:舵机的未来趋势随着技术的发展,舵机的控制将更加精确和智能化。
传感器技术的不断进步将使得舵机能够获得更加准确的反馈信号。
此外,人工智能和机器学习算法的应用也将提高舵机的控制精度和适应性。
未来,舵机有望成为机器人控制系统中更加重要的一部分,为机器人带来更高的运动和操作能力。
总结:舵机是机器人控制中不可或缺的一部分。
本论文从舵机的工作原理、控制方式、应用和未来的趋势等四个方面进行了介绍。
STM32--输入捕获和输出比较

概述输入捕获输入捕捉:可以用来捕获外部事件,并为其赋予时间标记以说明此事件的发生时刻。
外部事件发生的触发信号由单片机中对应的引脚输入(对应的引脚设置成输入)(具体可以参考单片机的datasheet ),也可以通过模拟比较器单元来实现。
时间标记可用来计算频率,占空比及信号的其他特征,以及为事件创建日志,主要是用来测量外部信号的频率。
1.1、朋友,可以解释一下输入捕获的工作原理不?很简单,当你设置的捕获开始的时候,cpu会将计数寄存器的值复制到捕获比较寄存器中并开始计数,当再次捕捉到电平变化时,这是计数寄存器中的值减去刚才复制的值就是这段电平的持续时间,你可以设置上升沿捕获、下降沿捕获、或者上升沿下降沿都捕获。
它没多大用处,最常用来测频率。
1.2、计数寄存器的初值,是自己写进去的吗?是的,不过默认不要写入(即计数寄存器为零)1.3、我如果捕获上升沿,两个值相减,代表的时两个上升沿中间那段电平的时间。
对不?是的一1.4、timer1 有五个通道(对应五个10引脚),在同一时刻,只能捕获一个引脚的值,对不?那是肯定的,通道很像ADC通道,是可以进行切换的。
输出比较输出比较:定时器中的计数寄存器在初始化完后会自动的计数,从bottom 计数到top,并且有不同的工作模式。
另外,还有个比较寄存器。
一旦计数寄存器在从bottom 到top计数过程中与比较寄存器匹配(在计数的过程中进行比较,不单指bottom 或top)则会产生比较中断(比较中断使能的情况下),这里的匹配指的是计数寄存器的值与比较寄存器的值相等。
然后根据不同的工作模式计数寄存器将清零或者计数到top值。
2.1、那输出比较的原理你可以帮我介绍一下不?这里有两个单元:一个计数器单元和一个比较单元,比较单元就是个双缓冲寄存器,比较单元的值是可以根据不同的模式设置的,与此同时,计数器在不停的计数,并不停的与比较寄存器中的值进行比较,当计数器的值与比较寄存器的值相等的时候一个比较匹配就发生了,根据自己的设置,如果匹配了,那么对应的io 口电平取反、变低、还是变高,就会产生不同的波形了。
基于STM32的舵机控制器电路设计

Key words: ervo controller; STM32; multi- channel adjustable PWM output; USB analog serial port; MCU minimum
22 Ω电阻 R7 和 R8,防止信号反射,D+端上拉 1.5 K 电
采用 3 个 LED 指示灯,指示控制器的运行状态。
PCB 板的面积。单片机通过 SWD 接口实现程序烧
DS1 串联 510 Ω的限流电阻,与电源和地相连,用于指
态,直接将 BOOT1 和 BOOT2 引脚,通过 10 K 的下拉
好舵机控制器的电路、PCB 板后,焊接元器件,得到图
7 所示的舵机控制器电路板。
图3
图4
电源电路
UBS 通信电路
图7
4
焊接好的舵机控制器
结语
本文基于 STM32F103RCT6 芯片,充分利用其内
设资源,设计了 24 路舵机控制器的硬件电路,包括最
小系统电路,外围电路等。本设计简化舵机控制器的
电路设计,提高了舵机控制器的运行稳定性。通过实
人设计[J].电子器件,2013(1):
128-131.
(责任编辑
王雪芬)
[8]张铁民,黄翰,黄鹏焕.电动轮式移动小车控制系
Design of servo controller based on STM32
Liu Qunming, Wang Yong, Shi Yinggang*
stm32控制舵机的程序
stm32控制舵机的程序第一章:引言在现代机械系统领域,舵机是一种常见的旋转执行器,经常用于控制机械装置的运动。
舵机通过接收控制信号来控制旋转角度,具有精准定位、快速响应和稳定性好的特点,因此在无人机、机器人、摄像头稳定器等领域广泛应用。
然而,要实现舵机的精确控制,需要使用专门的硬件电路和相应的控制算法。
本论文将介绍一种基于STM32单片机控制舵机的方法。
第二章:STM32舵机控制原理2.1 舵机的工作原理舵机是一种综合了伺服电机和反馈控制系统的特殊电机。
它由电机、位置反馈装置和控制电路组成。
当控制信号输入到控制电路中时,电机根据信号的宽度来确定要旋转的角度,位置反馈装置则用于检测电机的实际位置。
2.2 STM32控制舵机的原理STM32单片机是一类功能强大且易于使用的微控制器,具有高性能、低功耗和丰富的外设资源。
为了控制舵机,我们需要将STM32的IO口与舵机的控制信号线相连接,并在程序中通过设置IO口的高低电平来生成PWM(脉宽调制)信号,从而控制舵机的角度。
第三章:STM32舵机控制程序设计在本章中,我们将介绍具体的STM32舵机控制程序设计步骤。
3.1 硬件连接首先,需要将舵机的控制信号线连接至STM32单片机的某个IO口。
具体连接方式可以参考相关的舵机控制电路图。
3.2 建立工程使用Keil等开发工具,根据STM32型号建立一个新工程,并配置好相应的时钟和引脚设置。
3.3 编写程序在主函数中,需要先初始化IO口,并配置为输出模式。
然后编写一个循环,不断改变IO口的电平状态,以产生PWM信号。
根据舵机的角度范围(一般为0到180度),通过改变IO口电平的时间间隔和占空比,可以控制舵机旋转到相应的角度。
3.4 烧录程序最后,将生成的可执行程序烧录到STM32单片机中,然后连接电源即可运行舵机控制程序。
第四章:实验结果与分析为了验证上述STM32舵机控制程序的有效性,我们进行了一系列实验。
实验结果表明,通过控制不同的PWM信号,可以实现对舵机的精确控制,使其旋转到相应的角度。
stm32控制多个舵机

stm32控制多个舵机章节一:引言 (200-250字)引言部分介绍了舵机作为一种常用的电机,其在机器人、遥控模型等领域中的广泛应用。
同时,也提到了传统的舵机控制方法存在的一些问题,如操作复杂、控制效果不稳定等。
为了解决这些问题,本文将介绍基于STM32微控制器的多舵机控制系统设计与实现,以提供一种简便、高效、稳定的舵机控制方案。
章节二:系统设计与实现 (300-350字)系统设计部分详细介绍了基于STM32微控制器的多舵机控制系统的硬件和软件设计。
在硬件方面,本系统采用了STM32微控制器作为主控制器,通过GPIO口来控制各个舵机的输入信号。
在软件方面,采用C语言编程,结合STM32的开发环境,通过编写相应的程序代码实现对舵机的控制。
同时,为了提高系统的稳定性,本文还设计了相关的电路保护措施,以防止电流过大对舵机和系统造成损坏。
章节三:系统测试与分析 (250-300字)系统测试部分分别对设计的多舵机控制系统进行了硬件和软件测试。
在硬件测试中,通过连接舵机并将系统通电,观察舵机是否按照预期动作以及电流是否在正常范围内等,来验证系统硬件设计的可靠性。
在软件测试中,通过编写不同的程序代码,验证系统在不同控制模式下对舵机的控制效果和响应速度,以验证系统软件设计的有效性。
章节四:结论与展望 (150-200字)结论部分总结了本文的研究工作和主要创新点。
本文通过基于STM32微控制器的多舵机控制系统设计与实现,提供了一种简便、高效、稳定的舵机控制方案。
通过系统测试与分析,验证了设计的系统在硬件和软件方面的可靠性和有效性。
未来的研究可以继续深入优化系统设计,提高舵机控制精度和响应速度,并可将该系统应用于更广泛的领域中,如机器人、无人机等。
注:以上字数仅供参考,可以根据实际情况做适当调整。
章节一:引言 (200-250字)引言部分介绍了舵机作为一种常用的电机,其在机器人、遥控模型等领域中的广泛应用。
同时,也提到了传统的舵机控制方法存在的一些问题,如操作复杂、控制效果不稳定等。
单片机控制舵机
单片机控制舵机单片机控制舵机是一种常见的控制方法,它可以让舵机按照程序的要求进行动作。
舵机通常用于各种机械设备中,比如机器人、航模、汽车遥控器等等。
下面我们就来学习一下单片机控制舵机的方法。
首先,让我们来了解一下舵机的结构。
舵机包括电机、减速器、位置反馈装置和控制电路等组成部分。
控制电路是用来控制电机旋转的,而位置反馈装置则可以检测舵机角度的变化。
通过不同的控制信号,控制电路可以让舵机停在不同的位置上,也就是我们常说的舵机位置。
控制信号一般采用PWM波形,其频率为50Hz或100Hz。
频率为50Hz时,舵机能够输出20ms的PWM波,对应的舵机角度为0°(最大逆时针转),90°(中心位置)和180°(最大顺时针转)。
舵机的控制信号一般采用3线控制模式,分别是信号线、电源线和地线。
接下来,让我们来了解一下单片机如何控制舵机。
单片机可以通过生成PWM波形信号来控制舵机的位置。
首先,需要将单片机的IO口配置为PWM输出模式,然后设置相应的频率和占空比来控制舵机位置。
为了让舵机运动更加稳定,需要考虑舵机的惯性和响应时间。
在程序中,通过调整PWM的频率和占空比可以改变舵机的位置,增加或减小PWM的占空比可以让舵机旋转到不同的位置上,从而实现舵机的控制。
下面是一个简单的单片机控制舵机的程序,以STM32单片机为例:#include "stm32f10x.h"#define PWM_FREQ 50#define PWM_MIN 500 // 最小占空比#define PWM_MAX 2500 // 最大占空比void PWM_Configuration(void) // PWM配置函数{GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); // 打开GPIOA外设时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); // 打开TIM2外设时钟TIM_TimeBaseStructure.TIM_Prescaler = (72000000 / 2) / PWM_FREQ - 1; // 预分频器7200,计数器周期20msTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; // 向上计数TIM_TimeBaseStructure.TIM_Period = 20000 / PWM_FREQ - 1; // PWM周期20msTIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 时钟分频器不分频TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);TIM_ARRPreloadConfig(TIM2, ENABLE);TIM_Cmd(TIM2, ENABLE);}void delay_us(u32 n) // 延时函数{n *= 8; // 精确度为8MHzwhile(n--) asm("nop");}while(1){TIM2->CCR4 = PWM_MIN; // 舵机最小位置delay_us(1000000); // 延时1秒钟TIM2->CCR4 = PWM_MAX; // 舵机最大位置delay_us(1000000); // 延时1秒钟}}在这个程序中,我们定义了一个PWM的频率,最小和最大占空比,并通过GPIO口配置了PA0。
基于stm32的步进电机控制系统嵌入式课程设计

课程设计报告书题目: 基于stm32的步进电机控制系统课程:嵌入式系统课程设计专业:电子信息科学与技术2016年 4 月 15 日课程设计任务书信息工程学院课程设计成绩评定表摘要本文的主要工作是基于STM32步进电机控制系统的设计。
随着越来越多的高科技产品逐渐融入了日常生活中,步进电机控制系统发生了巨大的变化。
单片机、C语言等前沿学科的技术的日趋成熟与实用化,使得步进电机的控制系统有了新的的研究方向与意义。
本文描述了一个由STM32微处理器、步进电机、LCD显示器、键盘等模块构成的,提供基于STM32的PWM细分技术的步进电机控制系统。
该系统采用STM32微处理器为核心,在MDK的环境下进行编程,根据键盘的输入,使STM32产生周期性PWM信号,用此信号对步进电机的速度及转动方向进行控制,并且通过LCD显示出数据。
结果表明该系统具有结构简单、工作可靠、精度高等特点.关键词:STM32微处理器;步进电机;LCD显示;PWM信号;目录1 任务提出与方案论证 (5)1.1 任务提出 (5)1.2 方案论证 (5)2 总体设计 (6)2.1系统的硬件设计 (6)2.2控制系统软件设计 (6)3 详细设计及仿真 (8)3.1设计主要程序部分 (8)3.2调试与仿真 (9)4 总结 (10)5 实物图和仿真图 (11)1 任务提出与方案论证步进电机控制系统的整个设计中最重要的部分是利用PWM细分实现步进电机调速的处理,虽然PWM调速很早就开始研究应用,但如何用PWM细分调速的快速性和准确性至今仍是生产和科研的课题。
随着微电子技术的发展与普及,更多高性能的单片机应用使得PWM细分实现步进电机PWM调速的快速性和准确性都有了极大的提高。
1.1 任务提出总体方案根据课题要求,本设计采用STM32cortex-M3处理器,由SPGT62C19B 电机控制模块作为直流电机的驱动芯片,由ADC输入电位器产生调速命令,用TFT彩色LCD作为显示模块。
基于STM32的舵机控制系统
摘要随着越来越多的高科技产品逐渐融入了日常生活中,舵机的控制系统发生了巨大的变化。
单片机、C语言等前沿学科的技术的日趋成熟与实用化,使得舵机的控制系统有了新的的研究方向与意义。
本文描述了一个由STM32微处理器、舵机、LCD 显示器、键盘等模块构成的,提供基于STM32的PWM信号舵机的控制系统。
该系统采用STM32微处理器为核心,在MDK的环境下进行编程,根据键盘的输入,使STM32产生周期性PWM信号,用此信号对舵机的速度及转角进行控制,并且通过LCD显示出数据。
结果表明该系统具有结构简单、工作可靠、精度高等特点.关键词:STM32微处理器;舵机系统;LCD显示;PWM信号AbstractAs well as the high-tech products gradually integrated into the daily life,servo control system has undergone tremendous changes.SCM and C language of the frontier disciplines such mature technology and practical,Make steering control system is a new research direction and meaning.This paper describes a STM32 microprocessors, steering, LCD display and keyboard, etc.Based on the STM32 servo control system of PWM signal,This system uses STM32 microprocessor as the core, MDK in the environment, according to the keyboard input programming, STM32 produce periodic PWM signal, with this signal to the velocity and Angle of steering gear control, and through the LCD display data. The features of the simple hardware, stable operation and high precision are incarnated in the proposed system.Keywords:STM32 microprocessors; Steering system; LCD display;pulse width modulation signal目录第1章绪论 (1)1.1 课题背景 (1)1.2 课题的研究展望 (2)课题任务及要求 (2)1.3 课题内容及安排 (3)第2章硬件设计 (4)2.1 STM32微处理单元 (4)2.2 舵机 (8)2.3 LCD显示器 (9)2.4 时钟电路的制作 (10)第3章软件设计 (12)3.1 STM32固件库简介 (12)3.2 软件的总体设计 (13)3.3 时钟初始化子程序 (14)3.4 I/O口初始化子程序 (16)3.5 PWM信号子程序 (17)3.6 A/D转换初始化子程序 (18)3.7 LCD显示子程序 (19)第4章系统调试 (21)4.1 调试方案 (21)4.1.1 硬件调试方案 (21)4.1.2 软件调试方案 (21)4.2 故障调试及解决方法 (22)4.3 联调结果 (22)结论 (26)社会经济效益分析 (27)参考文献 (28)致谢 (29)附录I 电路原理图 (30)附录Ⅱ程序清单 (35)第1章绪论舵机(servo motor),又名伺服电机,主要是由外壳、电路板、马达、减速齿轮和电位器构成。
基于stm32的智能小车课程设计功能模块的划分

基于STM32的智能小车课程设计功能模块的划分随着科技的不断发展,智能小车作为一种智能化的机器人设备,已经在教学实验和科研领域得到了广泛的应用。
基于STM32的智能小车课程设计是一门将理论知识与实践相结合的课程,通过对STM32单片机的功能模块进行划分,学生可以在实际操作中深入了解单片机控制原理和应用。
本文将基于STM32的智能小车课程设计功能模块进行详细的划分,以便于教师和学生更好地理解课程的内容与结构。
一、硬件模块的划分1. 控制模块1.1 STM32单片机1.2 驱动电路1.3 传感器接口2. 传感器模块2.1 光电传感器2.2 红外传感器2.3 超声波传感器3. 执行模块3.1 电机驱动3.2 舵机控制3.3 无线通信二、软件模块的划分1. 系统初始化1.1 端口初始化1.2 定时器设置1.3 中断配置2. 运动控制2.1 速度控制2.2 转向控制2.3 路径规划3. 传感器数据处理3.1 传感器数据采集3.2 数据滤波处理3.3 数据解析与显示4. 无线通信4.1 通信协议4.2 信号传输4.3 数据接收与发送三、课程设计模块的划分1. 实验前准备1.1 实验器材准备1.2 软件环境搭建2. 硬件电路设计2.1 控制模块设计2.2 传感器模块设计2.3 执行模块设计3. 软件程序设计3.1 系统初始化编程3.2 运动控制程序设计3.3 传感器数据处理程序设计3.4 无线通信程序设计4. 系统集成测试4.1 硬件连接测试4.2 软件功能测试4.3 整体性能测试基于STM32的智能小车课程设计功能模块的划分,可以帮助学生系统地学习和掌握单片机控制的原理和方法,培养学生的动手能力和创新意识。
教师可以根据功能模块的划分,有针对性地进行教学安排和指导,提高教学效果和学习效率。
基于STM32的智能小车课程设计功能模块的划分,对于促进学生对单片机控制技术的理解和应用具有重要意义,同时也有利于提高教学质量和学术水平的提升。
STM32主机使用说明书
STM32主机使用说明书一、介绍纳英特STM32智能机器人平台采用ST公司的STM32103FVET6作为主控制器,内核采用了ARM公司Cortex M3存储容量大、运行速度快、外围接口丰富、稳定可靠,支持图形化及C语言编程,同时兼容原配件,是您进行竞赛、教学的理想选择。
二、布局(根据盒子图片再做)三、操作3.1搭建根据需要搭建机器人整机,连接传感器与马达,连接马达等,具体搭建方法请参考相应的项目手册,如灭火、足球项目的不同方案。
3.2编程根据项目需要对机器人进行编程。
可使用图形化的积木式编程模式,也可以使用C语言模式,软件的使用方法请参阅《纳英特积木式编程系统使用说明书》。
3.3下载软件上编程完成,编译通过,要下载时先把数据线连接好,再开启电源,这时主机会自动进入下载模式,被电脑识别为一个U盘,然后在软件上点击下载即可。
注:下载过程其实是将软件编译好的可执行文件***.bin文件拷贝到主机的这个U盘中,可执行的文件名是8.3格式的短文件名,不支持中文。
当软件新建的项目名为中文名时,下载时软件会跳出一个另存为的对话框,以英文或数字命名存储到U 盘即可;当项目名为英文或数字时,生成的***.bin文件的文件名即为项目名。
3.4运行程序下载完后,会保存在主机的U盘中,可同时存多个程序。
运行时,选择所需要的运行的程序名称即可。
主机开机后,屏幕上显示4个菜单选项,可通过上下键选择。
第一项为“运行”,后面显示的是当前的程序文件名,如果要运行的程序就是当前显示的程序,直接按确认键即可;如果要运行的程序不是当前显示的程序,则进入“选择程序”一项,屏幕会显示U盘中所存在的每一个程序名,通过上下键选择要运行的程序按确认键返回到原来的界面,再选择“运行”,按确认键。
3.5调试观察机器人运行结果是否符合预期的要求,如不符合,可重复以上4个步骤反复调试,直到符合预期的要求。
四、测试和设置主机固件中包含一个硬件的测试和设置的程序,在开机后的界面中选择“测试设置”,按确认键进入,屏幕显示“测试程序”,“参数修改”,“蓝牙设置”,“系统信息”。
基于STM32的机械臂运动控制分析设计
机器人测控技术大作业课程设计课程设计名称:基于STM32的机械臂运动控制分析设计专业班级:自动1302学生XX:鹏涛学号:9指导教师:毅课程设计时间:2016-4-28~2016-5-16目录摘要V第一章运动模型建立VI1.1引言VI1.2机器人运动学模型的建立VI1.2.1运动学正解VIII第二章机械臂控制系统的总体方案设计 (X)2.1机械臂的机械结构设计 (X)2.1.1臂部结构设计原则 (X)2.1.2机械臂自由度的确定...................................................................... X I2.2机械臂关节控制的总体方案....................................................................... X I2.2.1机械臂控制器类型的确定.............................................................. X I2.2.2机械臂控制系统结构 (XII)2.2.3关节控制系统的控制策略 (XIII)第三章机械臂控制系统硬件设计 (XIII)3.1机械臂控制系统概述 (XIII)3.2微处理器选型 (XIV)3.3主控制模块设计 (XV)3.3.1电源电路 (XV)3.3.2复位电路 (XVI)3.3.3时钟电路 (XVI)3.3.4 JTAG调试电路 (XVII)3.4驱动模块设计 (XVII)3.5电源模块设计 (XIX)第四章机械臂控制系统软件设计 (XX)4.1初始化模块设计 (XX)4.1.1系统时钟控制 (XX)4.1.2 SysTick定时器 (XXII)4.1.3 TIM定时器 (XXIII)4.1.4通用输入输出接口GPIO (XXIV)4.1.5超声波传感器模块 (XXV)总结XXVI参考文献XXVII附录AXXIX附录BXXX设计要求:设计一个两连杆机械臂,具体参数自行设计,建立其运动学模型,然后在此基础上完成该机械臂两点间的路径规划,并给出仿真结果。
直控式电动舵机教学实验系统设计

实 验 技 术 与 管 理 第36卷 第11期 2019年11月Experimental Technology and Management Vol.36 No.11 Nov. 2019ISSN 1002-4956 CN11-2034/TDOI: 10.16791/ki.sjg.2019.11.021直控式电动舵机教学实验系统设计刘 涛,王明辉,杜宏旺(哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001)摘 要:设计开发了直控式电动舵机教学实验系统。
采用STM32Cortex-M4单片机作为控制核心,设计实现了直接控制式电动舵机的位置闭环控制系统。
详细介绍了实验系统的设计方案、设计任务、硬件组成、数学建模和仿真设计,开发了基于LabWindows 的上位机软件界面,实现控制指令输入和动态测试。
该系统采用模块化的软硬件方案,有助于深入学习电动舵机闭环控制、STM32单片机、上位机设计等知识,提高了学生知识综合运用能力和实践动手能力,获得了良好的实践教学效果。
关键词:电动舵机;位置闭环控制;教学实验系统中图分类号:TJ760.3-45 文献标识码:A 文章编号:1002-4956(2019)11-0084-05Design of teaching experiment system for direct-controlledelectric steering gearLIU Tao, WANG Minghui, DU Hongwang(College of Automation, Harbin Engineering University, Harbin 150001, China)Abstract: A teaching experiment system of direct-controlled electric steering gear is designed and developed. The STM32Cortex-M4 MCU is used as the control core to design and implement the position closed-loop control system of the direct-controlled electric gear. The design scheme, design task, hardware composition, mathematical modeling and simulation design of the experimental system are introduced in detail. The upper computer software interface based on LabWindows is developed, which can realize control instruction input and dynamic test. This system adopts the modular software and hardware scheme, which is helpful for students to further study the knowledge of the closed-loop control of the electric steering gear, STM32 single-chip computer, upper computer design, etc., which improves students’ comprehensive knowledge application ability and practical ability, and achieves good practical teaching effect.Key words: electric steering gear; position closed-loop control; teaching experiment system舵机是导弹及飞行器的重要执行部件[1-2],舵机的技术参数很大程度影响了导弹的操纵性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单片机控制舵机
我们知道,舵机和步进电机,直流电机等都是感性负载,单片机的驱动电流较小,我们驱动直流电机,步进电机的时候都是用了驱动模块,也就是功率放大器件。
那驱动舵机时候是否需要呢?因为舵机内部集成了驱动电路,可以对我我们输入的PWM信号直接采样,所以,控制舵机的时候,用一个单片机的PWM引脚即可,这大大精简了电路设计。
1.舵机供电电压和电流
要使舵机工作在额定功率下,电路方面需要满足舵机的要求,包括电流和电压,这个我们可以根据舵机的具体参数选择,比如某款舵机参数如下:
*扭力:13kg/cm(at4.8V)15kg/cm(at6V)
*速度:0.18sec/60度(at4.8V)0.15sec/60度(at6V)
*工作电压:4.8V-6V
根据以上信息,我们最好能够提供6V的电压,我们知道,设备的电流是由负载决定的。
比如舵机空载控制的时候一般电流是不大于400mA,但是带负载时候可能大于1A,然后我们设计机械臂的时候有5或者6个舵机,因为处于不同关节,所以实际使用中不会每个舵机都同时达到最大电流,那这里可以选择6V5A的电源。
要输出这么大的电流,一般的LDO(线性稳压器)是无法满足的了,需要选择开关稳压芯片,而一般的芯片也没有固定5V输出,需要选择可调版本,通过电阻调节电压输出到6V。
这里我们选择XL4015,根据手册,这款芯片可以满足我们的要求,如下图所示。
下面是XL4015的应用电路。
2舵机的速度控制
舵机的驱动是比较容易的,当我们使用了单片机控制的时候,通过输出50HZ(20ms 周期)的PWM,控制PWM的脉宽调节舵机的转角。
为了节约篇幅,较长的PWM初始化代码就不贴出来了,大家翻看程序即可。
前面章节有说明:舵机的转角和脉宽(高电平长度)存在一一对应关系,如果要控制舵机到某一角度,就改变输出的脉宽即可,比如从1ms到1.5ms,显然,很容易就实现了舵机位置控制,但是我们如何进行舵机速度控制呢?
这里我们引入了PID算法,下面先看一下程序
Velocity1=Position_PID1(Position1,Target1);
Position1+=velocit1;
TIM4->CCR1=Position1;
其中我们使用Velocity1用于代表舵机的速度,这个值根据目标值和舵机的实际位置计算得到,然后通过累积的方法,赋值给相关寄存器作用到舵机。
这样我们就把舵机的速度调节变成了PID参数大小的调节。
另外,在接近目标位置的时候还可以实现减速,防止因为惯性的问题造成舵机齿轮减速箱的损坏。
下面我们看一下Position_PID1这个函数
PID参数是这样设定的,Position_KP=5,Position_KI=0,Position_KD=2;这里没使用I控制,因为PD控制已经可以满足要求,关于PID调试可以结合之前的PID位置控制参数整定章节进一步学习了解。