浙江大学自动控制原理第一章课件
合集下载
自动控制原理讲义第1章自动控制的一般概念 PPT

欢迎各位!
大家好
1
自动控制原理
程向红 蔡体菁
大家好
2
第1讲
程向红
自动控制的一般概念
大家好
3
• 1.1 引言 • 1.2自动控制系统示例 • 1.3闭环控制和开环控制 • 1.4自动控制系统的分类 • 1.5对自动控制系统的基本要求 • 1.6对本课程的基本要求
大家好
4
历史的回顾
• 18世纪,James Watt 为控制蒸汽机速度设计的离心调
在无人直接参与的情况下,
通过控制器使被控对象或
过程自动地按照预定要求 进行。
• 2 对象
是一个设备,它是由一些
• 3 过程
称任何被控制的运行状态 为过程,其具体例子如化 学过程、经济学过程、生 物学过程。
机器零件有机地组合在一 起的,其作用是完成一个 特定的动作。在下面的讨 论中,称任何被控物体 (如加热炉、化学反应器 或宇宙飞船)为对象。
大家好
14
• 反馈控制系统 • 开环控制系统 • 闭环与开环控制系统的比较
大家好
15
1.3.1 反馈控制系统
1 反馈 把取出的输出量送回输入端,并与输入信
号相比较产生偏差信号的过程,称为反馈。若反 馈的信号与输入信号相减,使产生的偏差越来越 小,则称为负反馈;反之,则称为正反馈。
2 反馈控制系统
大家好
10
• 7 反馈控制系统
反馈控制系统是一种能对输出量与参 考输入量进行比较,并力图保持两者之间 的既定关系的系统,它利用输出量与输入 量的偏差来进行控制。
应当指出,反馈控制系统不限于工程 范畴,在各种非工程范畴内,诸如经济学 和生物学中,也存在着反馈控制系统。
大家好
大家好
1
自动控制原理
程向红 蔡体菁
大家好
2
第1讲
程向红
自动控制的一般概念
大家好
3
• 1.1 引言 • 1.2自动控制系统示例 • 1.3闭环控制和开环控制 • 1.4自动控制系统的分类 • 1.5对自动控制系统的基本要求 • 1.6对本课程的基本要求
大家好
4
历史的回顾
• 18世纪,James Watt 为控制蒸汽机速度设计的离心调
在无人直接参与的情况下,
通过控制器使被控对象或
过程自动地按照预定要求 进行。
• 2 对象
是一个设备,它是由一些
• 3 过程
称任何被控制的运行状态 为过程,其具体例子如化 学过程、经济学过程、生 物学过程。
机器零件有机地组合在一 起的,其作用是完成一个 特定的动作。在下面的讨 论中,称任何被控物体 (如加热炉、化学反应器 或宇宙飞船)为对象。
大家好
14
• 反馈控制系统 • 开环控制系统 • 闭环与开环控制系统的比较
大家好
15
1.3.1 反馈控制系统
1 反馈 把取出的输出量送回输入端,并与输入信
号相比较产生偏差信号的过程,称为反馈。若反 馈的信号与输入信号相减,使产生的偏差越来越 小,则称为负反馈;反之,则称为正反馈。
2 反馈控制系统
大家好
10
• 7 反馈控制系统
反馈控制系统是一种能对输出量与参 考输入量进行比较,并力图保持两者之间 的既定关系的系统,它利用输出量与输入 量的偏差来进行控制。
应当指出,反馈控制系统不限于工程 范畴,在各种非工程范畴内,诸如经济学 和生物学中,也存在着反馈控制系统。
大家好
自动控制原理课件第一章

精品资料
二、 闭环控制(反馈控制) 定义:凡是系统输出信号对控制作用有直接影响(yǐngxiǎng)的
系统,都叫做闭环控制系统。
输入
偏差
+-
控制装置
控制对象
输出
反馈元件
图1-13 闭环控制系统Байду номын сангаас框图
精品资料
室温(shì wēn)控制 系统
r+ -
e 空调器
热传导 室内空气等c
y
热敏电阻
图 1 - 1 室温控制系统元件(yuánjiàn)框图
烈变化之中) b.稳态过程 反映系统的稳态特性。(输出量稳定在新的平衡
当出水与进水的平衡被
控制器
破坏时,水箱水位下降(
流入
或上升),出现偏差
浮子 水箱
(piānchā)。这偏差 (piānchā)由浮子检测出 来,自动控制器在偏差
h
流出 (piānchā)的作用下,控
制阀门开大(或关小),对
图1.3 液面自动控制
偏差(piānchā)进行修正
精品资料
2. 自动控制的基本职能(zhínéng)元件 自动控制,实际上就是由自动控制装置代替人的基本功能来
一 .开环控制
定义:若系统的输出量对系统的控制作用没有影响,则称为 (chēnɡ wéi)开环控制系统。
特点是:控制量与被控制量之间只有前向通道而没有反向通道,信 息的传递路径不是闭合的,故称开环。
开环控制系统的典型方框图如图所示。
精品资料
16
输入量
控制器
被制对象
输出量
例子:交通指挥红绿灯,自动洗衣机,自动售货机,产品自动 生产线,数控车床等等。
比较元件:将被控量与给定值加以(jiāyǐ)比较,形成偏差信号;
二、 闭环控制(反馈控制) 定义:凡是系统输出信号对控制作用有直接影响(yǐngxiǎng)的
系统,都叫做闭环控制系统。
输入
偏差
+-
控制装置
控制对象
输出
反馈元件
图1-13 闭环控制系统Байду номын сангаас框图
精品资料
室温(shì wēn)控制 系统
r+ -
e 空调器
热传导 室内空气等c
y
热敏电阻
图 1 - 1 室温控制系统元件(yuánjiàn)框图
烈变化之中) b.稳态过程 反映系统的稳态特性。(输出量稳定在新的平衡
当出水与进水的平衡被
控制器
破坏时,水箱水位下降(
流入
或上升),出现偏差
浮子 水箱
(piānchā)。这偏差 (piānchā)由浮子检测出 来,自动控制器在偏差
h
流出 (piānchā)的作用下,控
制阀门开大(或关小),对
图1.3 液面自动控制
偏差(piānchā)进行修正
精品资料
2. 自动控制的基本职能(zhínéng)元件 自动控制,实际上就是由自动控制装置代替人的基本功能来
一 .开环控制
定义:若系统的输出量对系统的控制作用没有影响,则称为 (chēnɡ wéi)开环控制系统。
特点是:控制量与被控制量之间只有前向通道而没有反向通道,信 息的传递路径不是闭合的,故称开环。
开环控制系统的典型方框图如图所示。
精品资料
16
输入量
控制器
被制对象
输出量
例子:交通指挥红绿灯,自动洗衣机,自动售货机,产品自动 生产线,数控车床等等。
比较元件:将被控量与给定值加以(jiāyǐ)比较,形成偏差信号;
自动控制原理(第一章)

说 明
系统的元件 信息的流向
第7页,共24页。
例2:人如何控制设备:温箱的温度控制
被控对象:温箱; 被控量:温箱的温度;
测量元件:温度计
关键:利用温度偏差, 减小偏差。
期 温 望 度大 脑
手
调 压 器 恒 温 箱
实 际 温 度
眼 睛 温 度 计
人工控制恒温箱的功能框图
第8页,共24页。
例3:电炉的自动控制系统
示例: 直流电机调速系统
负
Ug
K
Ud M
载
第14页,共24页。
② 按干扰补偿的开环控制
第15页,共24页。
(3)复合控制
即按偏差的控制和按扰动的控制相结合的控制方式。 按可测扰动补偿的复合控制
第16页,共24页。
1-2 自动控制系统示例
函数记录仪 飞机-自动驾驶仪系统
电阻炉微型计算机温度控制系统 锅炉液位控制系统
第23页,共24页。
谢谢大家
第24页,共24页。
第17页,共24页。
1-3 自动控制系统的分类
按控制方式分: 按元件类型分: 按系统功用分: 按性能分: 按给定值类型分:
第18页,共24页。
常见的几种自动控制系统 1)线性连续控制系统
线性指满足线性叠加原理;
连续指系统的输入量和输出量都是时间连续函数; a0d dn ntc(t)a1d dn nt 1 1c(t) an1d dc t(t)anc(t) b0d dm m tr(t)b1d dm m t 1 1r(t) bm1d dtr(t)bmr(t)
u1
u2
u
第9页,共24页。
放大元件 执行机构
被控对象 测量元件
自动控制原理00第一章课件
推动了经典控制的发展 1948年,维纳出版《控制论》,形成完整的经典控制理论,
标志控制学科的诞生。
1.1 控制理论的发展
二次世界大战结束后,各国大力发展空间技术,经典控制理 论不能满足需要,需要研究新的控制理论。这个时期,众多的 数学家、科学家投入自动控制理论的研究,如自动控制科学家 从力学中引进了状态空间的概念。
准确性:系统完成动态调整过程之后进入了稳态,其输出量 与希望值之间的差值,称为稳态误差,当稳态误差为零时, 控制系统的准确性较好。
1.1 控制理论的发展 控制理论是研究自动控制共同规律的技术科学。
控制论: 经典控制理论
以传递函数为基础,研究 单输入---单输出定常控制
系统的分析与设计问题
现代控制理论(智能控制理论)
以状态空间法为基础, 多输入--多输出时变、非线性、 高精度、高效能控制系统的分
析与设计问题
1.1 控制理论的发展
1.4.4 按系统参数是否随时间变化分类
(1)定常系统:系统全部参数不随时间变化,可用定常微分 方程(定常差分方程)来描述,又称时不变系统
(2)时变系统:系统的一个或几个参数是时间t的函数,不能 用定常微分方程来描述
1.5 自动控制系统的基本要求
自动控制系统在具备稳定性的前提下,在稳态性能、动态性 能和抗扰性能等方面,有量化的指标要求。
1.4 自动控制系统的分类
1.4.2 按系统传输信号对时间的关系分类
(1)连续系统:构成系统的各环节的输入量和输出量都是 时间的连续函数,其运动规律可用微分方程描述,也称为 模拟控制系统
(2)离散系统:构成系统的某一个环节或多个环节的输入 量或输出量为时间上离散的脉冲序列,其运动规律可用差 分方程描述,也称为数字控制系统
标志控制学科的诞生。
1.1 控制理论的发展
二次世界大战结束后,各国大力发展空间技术,经典控制理 论不能满足需要,需要研究新的控制理论。这个时期,众多的 数学家、科学家投入自动控制理论的研究,如自动控制科学家 从力学中引进了状态空间的概念。
准确性:系统完成动态调整过程之后进入了稳态,其输出量 与希望值之间的差值,称为稳态误差,当稳态误差为零时, 控制系统的准确性较好。
1.1 控制理论的发展 控制理论是研究自动控制共同规律的技术科学。
控制论: 经典控制理论
以传递函数为基础,研究 单输入---单输出定常控制
系统的分析与设计问题
现代控制理论(智能控制理论)
以状态空间法为基础, 多输入--多输出时变、非线性、 高精度、高效能控制系统的分
析与设计问题
1.1 控制理论的发展
1.4.4 按系统参数是否随时间变化分类
(1)定常系统:系统全部参数不随时间变化,可用定常微分 方程(定常差分方程)来描述,又称时不变系统
(2)时变系统:系统的一个或几个参数是时间t的函数,不能 用定常微分方程来描述
1.5 自动控制系统的基本要求
自动控制系统在具备稳定性的前提下,在稳态性能、动态性 能和抗扰性能等方面,有量化的指标要求。
1.4 自动控制系统的分类
1.4.2 按系统传输信号对时间的关系分类
(1)连续系统:构成系统的各环节的输入量和输出量都是 时间的连续函数,其运动规律可用微分方程描述,也称为 模拟控制系统
(2)离散系统:构成系统的某一个环节或多个环节的输入 量或输出量为时间上离散的脉冲序列,其运动规律可用差 分方程描述,也称为数字控制系统
自动控制原理第1章自动控制系统PPT
项目 1
自动控制系统
01 任务一 自动控制系统的认识 02 任务二 控制器与控制规律的认识
2020/3/22
任务一 自动控制系统的认识
【任务描述】
人工手动控制是自动控制的前提和保证,自动控制在投入运行前必须通过 人工手动控制,使被控变量稳定在设定值附近。自动控制是由仪表来代替人的 工作,由仪表模仿人的工作过程。本次实验通过人工和自动控制的比较,了解 自动控制系统的工作过程。
2020/3/22
【知识链接】
一、自动控制系统的性能指标
自动控制系统的性能通常是指系统的稳定性、稳态性能和动态性能。
1.系统的稳定性 (1)稳定系统
当扰动作用(或给定值发生变化)时,输出量将会偏离原来的稳定值,这 时,由于反馈环节的作用,通过系统内部的自动调节,系统可能回到(或接 近)原来的稳定(或跟随给定值)稳定下来,如图1-6a所示。
— 【能力目标】 — 1)学会用手动控制贮槽液位。 — 2)了解自动控制系统的组成及各组成部分的作用。 — 3)了解自动控制系统的工作过程
2020/3/22
【知识链接】
为了实现各种控制任务,将被控对象和控制装置按照一定方式连接,对被控 对象的一个或多个物理量(如转速、位移、温度、电流、电压等)进行自动控制 的整个系统称为自动控制系统。
【任务实施】
一、手动控制贮槽液位
1)按照图1-4所示的贮槽液位控制系统,手动调节进出水阀门,控制液 位在50%处。根据操作回答下列问题:
1.完成该操作必须用到哪三个器官? 2.手、大脑、眼睛各完成哪些功能?
2020/3/22
图1-4贮槽液位控制系统
2)操作要求:为了保证贮槽液位稳定在规定数值位置,操作人员必须按 照液位指示仪表反映的实际液位与规定值的偏差大小来改变进出水阀门的开度, 从而使液位符合规定的数值。
自动控制原理【课件】第1章
(3) 反馈环节的存在可以较好地改善系统的动态性能。 虽然在实际系统中, 反馈控制系统的形式是多样的, 但一般 均可化为图1 - 4的形式。
第一章自动控制的一般概念
1.2.2 线性控制系统和非线性控制系统
按照系统是否满足叠加原理, 系统可分为线性系统和非线性
系统两类。
在线性控制系统中, 组成控制系统的元件都具有线性特性。
式中:u(t) —系统的输入量;y(t) —系统的输出量。 线性系统的主要特点是具有叠加性和齐次性,即当系 统的输入分别为r1(t)和r2(t)时,对应的输出分别为c1(t) 和c2(t),则当输入为r(t)=a1r1(t)+a2r2(t)时,输出量为 c(t)=a1c1(t)+a2c2(t), 其中为a1、a2为常系数。
第一章自动控制的一般概念
1、线性系统 由线性元件构成的系统叫线性系统。其运动方程为线 性微分方程。若各项系数为常数,则称为线性定常系 统。其运动方程一般形式为:
y a1 y
( n)
( n1)
an y bou(n) bu(n1) bn1u bnu an1 y 1
在控制系统中, 反馈的概念非常重要。在图1-4中, 如果将反
馈环节取得的实际输出信号加以处理, 并在输入信号中减去这 个反馈量, 再将结果输入到控制器中去控制被控对象, 这样的反 馈称为负反馈; 反之, 若由输入量与反馈量相加作为控制器的输 入, 则称为正反馈。在一个实际的控制系统中, 具有正反馈形式 的系统一般是不能改进系统性能的, 而且容易使系统性能变坏, 因此不被采用; 而具有负反馈形式的系统, 它通过自动修正偏离
值。一旦室内温度达到设定值后, 放大器输出电压e使空调断电
而停止运行。于是室内温度就被控制在设定值的附近。
第一章自动控制的一般概念
1.2.2 线性控制系统和非线性控制系统
按照系统是否满足叠加原理, 系统可分为线性系统和非线性
系统两类。
在线性控制系统中, 组成控制系统的元件都具有线性特性。
式中:u(t) —系统的输入量;y(t) —系统的输出量。 线性系统的主要特点是具有叠加性和齐次性,即当系 统的输入分别为r1(t)和r2(t)时,对应的输出分别为c1(t) 和c2(t),则当输入为r(t)=a1r1(t)+a2r2(t)时,输出量为 c(t)=a1c1(t)+a2c2(t), 其中为a1、a2为常系数。
第一章自动控制的一般概念
1、线性系统 由线性元件构成的系统叫线性系统。其运动方程为线 性微分方程。若各项系数为常数,则称为线性定常系 统。其运动方程一般形式为:
y a1 y
( n)
( n1)
an y bou(n) bu(n1) bn1u bnu an1 y 1
在控制系统中, 反馈的概念非常重要。在图1-4中, 如果将反
馈环节取得的实际输出信号加以处理, 并在输入信号中减去这 个反馈量, 再将结果输入到控制器中去控制被控对象, 这样的反 馈称为负反馈; 反之, 若由输入量与反馈量相加作为控制器的输 入, 则称为正反馈。在一个实际的控制系统中, 具有正反馈形式 的系统一般是不能改进系统性能的, 而且容易使系统性能变坏, 因此不被采用; 而具有负反馈形式的系统, 它通过自动修正偏离
值。一旦室内温度达到设定值后, 放大器输出电压e使空调断电
而停止运行。于是室内温度就被控制在设定值的附近。
精品课件-自动控制原理-第1章 绪论

1876年,俄国学者N.A.维什涅格拉诺基发表著作《论调速器的 一般理论》,对调速器系统进行了全面的理论阐述。
1927年,布莱克(H.S.Black)发现了采用负反馈线路的放大 器,放大器系统对扰动和放大器增益变化的敏感性大为降低。
1932年,奈奎斯特(H.Nyquist)采用频率特性表示系统,提
出了频域稳定性判据,很好地解决了Black放大器的稳定性问
第一章 绪论
8
自动控制 原理
1.2 反馈控制的基本原理
动态系统的反馈控制的概念,其核心思想是对一个系统的输 出量进行检测, 然后反馈到输入端与参考输入相比较,得到 的偏差信号经控制器的变换运算后,驱动执行机构,以使被控 对象的输出量能按照参考输入的要求变化。为了实现精确的 控制,应满足四个基本的要求。第一, 系统必须一处于稳定 状态。第二,系统输出必须跟踪控制输入信号。 第三, 系 统输出必须尽量克服来自扰动输入的响应 。虽然在设计中 使用的模型不是完全精确的, 或者物理系统的动态特性随时 间变化或者因环境变化而变化,但是这些目标是必须满足的。
的输出电压U对应不同的电机转速。图中反馈量 由编码器采集
的Δ信V为号V负期计值望算,速得控度到制。器当输实出际到速驱度动大器于的设u定值值减时小,,控从制而器减的小输了入输量出
电压,电机减速;当实际速度小于设定值时,控制器的输入量
ΔV为正值,控制器输出到驱动器的u值增大,从而增大了输出
电压,电机加速。
自动控制 原理
第一章 绪 论
2020/12/14
第一章 绪论
1
自动控制 原理
1.1 引言
本章的目的使读者熟悉和理解以下几个方面的内容:
• 1.什么是自动控制和控制系统。 • 2.控制理论发展史。 • 3.控制系统的工作原理是什么? • 4.控制系统的组成和分类。 • 5.几个控制系统的应用实例。
自动控制原理(全套课件659P)

手动控制
人在控制过程中起三个作用: (1)观测:用眼睛去观测温度计和转速表的指示值;
(2)比较与决策:人脑把观测得到的数据与要求的数据相比较,并进行
判断节,如调节阀门开度、改变触点位置。
ppt课件 4
1.1 自动控制的基本概念
在现代科学技术的众多领域中,自动控制技术起着越来越重要的作用。 如数控车床按预定程序自动切削,人造卫星准确进入预定轨道并回收
ppt课件 6
控制系统分析:已知系统的结构参数,分析系统的稳定性,求取系
统的动态、静态性能指标,并据此评价系统的过程称为控制系统分 析。
控制系统设计(或综合):根据控制对象和给定系统的性能指标,
合理的确定控制装置的结构参数,称为控制系统设计。 被控量 :指被控对象中要求保持给定值、要按给定规律变化的物理 量。被控量又称输出量、输出信号 。 给定值:系统输出量应达到的数值(例如与要求的炉温对应的电 压)。 扰动:是一种对自动控制系统输出量起反作用的信号,如电源电压
闭环控制是指系统的被控制量(输出量)
与控制作用之间存在着负反馈的控制 方式。采用闭环控制的系统称为闭环
控制系统或反馈控制系统。闭环控制
是一切生物控制自身运动的基本规律。 人本身就是一个具有高度复杂控制能
力的闭环系统。
优点:具有自动补偿由于系统内部和外 部干扰所引起的系统误差(偏差)的
能力,因而有效地提高了系统的精度。
脑
手
输出量 (手的位置)
ppt课件
16
闭环控制系统方框图
ppt课件
17
反馈控制系统的组成、名词术语和定义
反馈控制系统方框图
ppt课件
18
1.2 自动控制理论的发展
自动控制原理概述 ppt课件

h(t)
阀门
水箱
浮球
8
第一节 自动控制与自动控制系统
二、自动控制系统的基本构成 及控制方式
不同的被控对象和不同的控制装 置构成了不同的控制系统,所以自动 控制系统的种类是很多的。自动控制 系统一般有两种基本控制方式.
1.开环控制
开环控制 控制装置与受控对象之间只
有顺向作用而无反向联系.
2020/12/27
例 液位自动控制系统
工系作统原组理成:: 水箱调节杆杠杠杆 长 杠浮杆度球机L 构,阀调通门节过 阀进门水的开出度水, 从杆而杠调长节度进水
L h
量被以7
7
第一节 自动控制与自动控制系统
系统
结构 框图
L h
hr(s) 杠 杆
机构
2020/12/27
被控量
控制分通析过和对设各计类自机控动器制器控、制各系种受统物控对的理象性参能量。、工
自业动示生图控下意产制面过系通程统过等的一的基些控本实制概例直念来接检说造测明福元自件于动社控会制。和
2020/12/27
3
第一节 自动控制与自动控制系统
例 水温人工控制系统 系工统 作的过构程成:: 受控手蒸对动汽象调通:水箱 节被过阀热控门传制的导量开器:水温 度件,把从热阀而量门调传 节递热蒸给传汽水导的,水器流的件 量温,度显来与示控蒸仪制汽表水 的的蒸温流汽度量.成排正水 比冷. 水但人工热难水以实现稳定的高质量控制.
怎样根据工作任务的不同,分析和设计 自动控制系统,使其对三方面的性能有所 侧重 ,并兼顾其它正是自控原理课程要 解决的问题。
2020/12/27
29
第一章 概 述
第四节 自动控制理论发展简述
自动控制理论是研究自动控制共同规 律的技术科学。
自动控制原理第一章PPT课件
-
16
首次冲出太阳系 (美国伽利略号木 星 探 测 器 , 1989 年)
-
仿人机器人 (日本,2001年)
17
神舟五号载人航天成功(中国,2003年)
-
18
勇气号、机遇号火星探测器(美国,2004年)
-
19
“作为技术科学的控制论,对工程技术、生物
和生命现象的研究和经济科学,以及对社会研
究都有深刻的意义,比起相对论和量子论对社
(1)装置用方框表示 (2)信号用带箭头的线段表示 (3)信号引出点 (4)信号相加点(比较点)
-
27
方框(块)图 中的符号
控制系统框图的基本组成单元
元部件 信号(物理量)及传递方向 比较点 引出点 - 表示负反馈
-
返回 28
1-2自动控制系统基本控制方式
1. 开环控制 2. 闭环控制 3. 复合控制
近年来,我国在自动化仪表、工业调节器、数字控 制技术、航天工程、核动力工程等方面的研究和应用 取得了长足进展。
-
22
二.自动控制理论
1.定义 自动控制理论是研究自动控制共同规律的技术科 学. 2.分类 (1)经典控制理论:以传递函数为基础,主要研 究单输入—单输出,线性定常系统的分析和设计问题 。 (2)现代控制理论:主要研究具有高性能,高精 度的多变量多参数系统的最优控制问题。
-
25
三、自动控制系统
1.定义: 为了实现各种复杂的控制任务,将被控对象 和控制装置按照一定的方式连接起来组成的一 个有机总体。
控制装置(控制器):外加的设备或装置. 被控对象(process, plant, controlled system ):设备或生产过程.
自动控制原理第一讲.
6
浙江大学能源工程学系
—能源与环境系统工程—
1 被控对象:要求实现控制的机器、设备或生产 过程。 2 被控量:要求实现控制的物理量。 3 设定值:被控量的希望值。 4 扰动:使被控量偏离希望值的因素。
2017年10月15日
自动控制原理
7
浙江大学能源工程学系
—能源与环境系统工程—
5 控制(Control):根据某种原理或方法,使特定 对象(被控对象)的某些物理量(被控量)按 照预期规律变化的操纵过程。 6 人工控制(Manual Control):由人直接或间接操 作执行装臵的控制方式。 7 自动控制 (Automatic Control) :无需人去直接 或间接操纵执行机构,利用控制装臵来控制被 控量,使其自动地按预定的规律变化的过程。 8 控制系统(Control System):就是通过执行规定 的功能来实现某一给定目标的一些相互关联单 元的组合。由控制装臵和被控对象组成。
扰动 参考输入 控制器
控制量
被控 被控量 对象
反馈 环节
2017年10月15日
自动控制原理
14
浙江大学能源工程学系
—能源与环境系统工程—
闭环控制的优点 抑制扰动能力强,与开环控制相比,对参数变化 不敏感,并能获得满意的动态特性和控制精度。 闭环控制的缺点 引入反馈增加了系统的复杂性,如果闭环系统参 数的选取不适当,系统可能会产生振荡,甚至系 统失稳而无法正常工作。 自动控制理论主要研究闭环控制系统
控制系统根据信息传送的特点或系统的结 构特点可分为: 开环控制系统 闭环控制系统 复合控制系统(同时具有开环结构和闭环 结构)
2017年10月15日
自动控制原理
11
浙江大学能源工程学系
自动控制原理课件第一章控制系统的一般概念
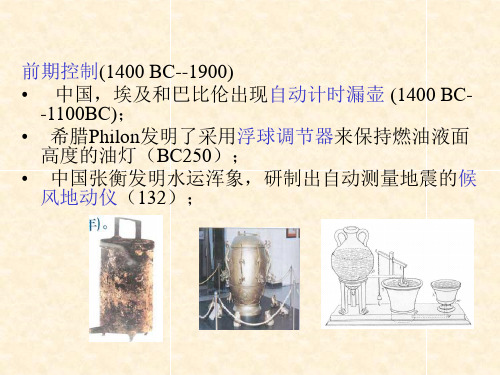
现代控制(1950--Now )
• 美国MIT 的Servomechanism Laboratory 研制 出第一台数控机床(1952);
• 美国George Devol研制出第一台工业机器人 样机(1954) ,两年后,被称为机器人之父的 Joseph Engelberger创立了第一家机器人公司, Unimation;
• 中国明代宋应星所著《天工开物》记载有程 序控制思想的提花织机结构图(1637);
• 英国 J. Watt用离心式调速器控制蒸汽机的 速度 (1788年)。
经典控制( 1935--1950)
• 美国 N. Minorsky 研制出用于船舶驾驶的伺服结构, 提出PID控制方法 (1922);
• 美国 E. Sperry以及C. Mason 研制出火炮控制器 (1925),气压反馈控制器 (1929);
后用已经成熟的数学方法和先进的计算工具来定性或定量地 对系统进行动、静态的性能分析。 • 综合:
在已知被控对象和合定性能指标的前提下,寻求控制规 律,建立一个能使被控对象满足性能要求的系统。
扰动信号
一.组成与术语 组成: 1.执行元件 2.放大元件 3.测量元件 4.补偿元件 5.比较元件
比较元件
放大与
参考输入+ 偏差信号 串联
+
功率 放大
-
补偿
-
反馈信号
执行 元件
控制 对象
反馈 补偿
测量元件
被控变量 被控量
术语:
典型功能框图
参考输入 主反馈
偏差
控制量扰动Fra bibliotek输出二 控制系统的基本要求
• 稳定性 • 准确性(稳态精度) • 快速性与平稳性(动态性能)
《自动控制原理》课件 第一章

离心调速器
36
1-5 自动控制理论发展简述
设定转速 +
比较器 Metal sphere -
进汽阀 门,连 杆机构
实际转速
蒸汽室 蒸汽机
转速测量
飞球 调节阀
离心调速器框图
37
1-5 自动控制理论发展简述
瓦特离心调速器在调速过程中存在不 稳定现象(“设备变得发狂!”),当时 并没有理论指导,所有的努力都集中在改 进调速器本身(重量、弹簧、摩擦)。 麦克斯维尔把调节器跟调节对象合在一 起,看作一个系统,用微分方程来进行研 究,指出微分方程的特征根在左半面或右 半面,决定着系统稳定与否。
6
1-1 自动控制的基本原理与方式
要使自动控制系统满足工程实际的需 要 , 必须研究自动控制系统的结构参数与 系统性能之间的关系。
为了方便地分析系统性能,一般用框 图来表示系统的结构:
预期 温度 偏差 _ 控制器 反馈量 执行机构 实际 温度 阀门
水箱
7
1-1 自动控制的基本原理与方式 二、自动控制系统的基本构成及控制方式 自动控制系统有两种基本控制方式:开 环控制与闭环控制。
30
1-4 对控制系统的基本要求
二、快速性
通过动态过程时间长短表征。时间 快速性表明了系统输出对输入响应 越短,表明快速性越好,反之亦然。 的快慢程度
r(t) c(t)
c1(t) r(t)
c2(t) t
0
31
1-4 对控制系统的基本要求
三、准确性
由输入给定值与输出响应的终值之 间的差值ess大小表征。
三、按信号的连续性来分:
1.连续控制系统:各环节输入和输出信号均为连续信号 2.离散控制系统:系统中有一处或数处的信号是离散的 (脉冲序列或数码)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第七章 离散化控制系统
5
自动控制理论
第二节 信号的采样与复现
一、采样过程 把连续信号变成脉冲或数字序列的过程叫做采样,把采 样后的离散信号恢复为连续信号的过程称为信号的复现。
f (kT )
图7-5
2015/8/6
式中:
f (t ) f (t )T (t )
证: Z [ f (t kT )] f1 (nT kT )Z n
k 0
f (kT ) Z 0 f (T kT ) Z 1 ... f (0) Z k f (T ) Z ( k 1) ... f (nT ) Z ( k n ) ...
例7-4 求 解:
1 1 a 2j 2j F (s) 2 s a 2 s ja s ja
Z (sin at)
2j 2j 1 e jaT z 1 1 e jaT z 1 (sin aT ) z 1 1 (2 cosaT ) z 1 z 2 F ( z)
2015/8/6 第七章 离散化控制系统 20
1
1
自动控制理论
2、留数计算法 设 f (t )的拉氏变换为F ( s ) ,且其为真有理式,PK 为F ( s )的极点, 则Z变换用下式求得
n z F ( z ) res[ F (s) ] Rk TS S PK z e k 1 k 1 z z Rk res [ F ( s ) ] F ( s ) 为 在 S PK上的留数: TS S PK TS z e z e 若F ( s )含有 S P 的一阶极点时,对应的留数为: z R lim[( s p) F ( s ) ] TS s p z e 若 F ( s )含有 S P 的q阶重极点时,对应的留数为: n
Z k [ f (kT ) Z k f (T kT ) Z ( k 1) ......] Z k [ f (0) f (T ) Z 1 ... f (kT ) Z k f [(k 1)T ]Z ( k 1) ......] Z k [ f (0) f (T ) Z 1 ... f [(k 1)T ]Z ( k 1) ] Z F ( z) Z
1 d q 1 z R lim q 1 [(s p) q F ( s) ] TS (q 1)! ds z e
s p
2015/8/6
第七章 离散化控制系统
21
自动控制理论
例7-5 已知 F ( s)
求 F ( z)
s3 ( s 1)( s 2)
解
s3 z ] TS s 1 ( s 1)( s q) z e s3 z [( s q) ] TS s 2 ( s 1)( s q) z e 2z z z e T z e qT F ( z ) [( s 1)
图7-1 计算机控制系统方框图
2015/8/6 第七章 离散化控制系统 2
自动控制理论
从A/D和D/A转换器看模拟量与数字量之间的转换关系, 且两者有着确定的比例关系,因而图7-1可以简化为图7-2
图7-2
图7-3
2015/8/6 第七章 离散化控制系统 3
自动控制理论
采取分时处理方式,用一台计算机控制多个被控对象。
或
1 f (t ) 2
* s
F ( j )
* S
k
a F[ j( k )]
k s
12
k
j t a F [ j ( k )] e d k s
2015/8/6
第七章 离散化控制系统
自动控制理论
图7-10
图7-11
2015/8/6 第七章 离散化控制系统 13
自动控制理论
图7-8可知,相邻两频谱不重叠交叉的条件是
s 2max
香农采样定理
s 2max
s
图7-12
f s* (t ) 就含有连续信号f(t)的全部信息,通过图7-11所示的理想滤
波器,则可把原信号f(t)不失真的复现.
2015/8/6 第七章 离散化控制系统
香农定理的物理意义是:采样角频率 s 若满足s 2max ,则
一、Z变换
设离散化信号
f (t ) f (kT ) (t kT )
* k 0
F ( s) L[ f (t )] f (kT )e kTS
* *
令 Z e
TS
,则
k 0
F ( z ) F ( s)
*
1 s ln z T
f (kT ) z k
k 0
*
(7-1) ,KT —脉冲出现时刻
f (t )
*
k
(t kT )
f (kT ) (t kT )
第七章 离散化控制系统
f * (t )
2015/8/6
k
7
(7-2)
自动控制理论
图7-7
考虑当t<0时,f(t)=0,则有
f * (t ) f (kT ) (t kT )
1
则 a0
1 T
a1
0.984 T
a2
0.935 T
…
图7-8
2015/8/6
第七章 离散化控制系统
10
自动控制理论
图7-9
f s* (t ) f (t )T (t ) f (t ) ak e jkst
k
1 [ 2
2015/8/6
F ( j )e jt d ] ak e jkst
自动控制理论
零阶保持器( ZOH )是把kT时刻的采样值恒值地保持到下一采样时 刻(K+1)T。
由图7-13(b)得
脉冲响应
g h (t ) l (t ) l (t T )
1 e TS Gh ( S ) S
传递函数
Tj sin(T ) jT 1 e 2 e 2 频率特性 Gh ( j ) T T j 2 2 T 把 代入上式,得 S sin( ) j ( ) S 2 Gh ( j ) e S
图7-4
2015/8/6
第七章 离散化控制系统
4
自动控制理论
计算机控制系统的优点
1)有利于系统实现高精度 2)有效地抑制噪声,提高了系统抗扰动的能力 3)不仅能完成复杂的控制任务,而且易于实现修改控制器的参数 4)有显示、报警等多种功能 分析离散系统的常用方法有两种:Z变换法和状态空间分析法。
2015/8/6
定义:
F ( z ) Z [ f (t )] f (kT ) z k
* k 0
Z变换的三种求法:
2015/8/6 第七章 离散化控制系统 18
自动控制理论
1、级数求和法 例7-1 求: Z [1(t )] 当 k 0 时,f (kT ) 1 ,则有
F ( z ) Z [1(t )] z k 1 z 1 z 2 ......
k 0
解:
如果 z 1 ,则上式可写为:
F ( z)
例7-2 求:
1 z 1 z 1 z 1
Z [e at ]
k 0
,a
0
解: F ( z ) e akT z k 1 e aT z 1 e 2 aT z 2 ...... 如果 e aT z 1 1,则:
k k
f (nT ) z
k 0
面向21世纪课程教材
自动控制理论
第七章
离散化控制系统
作者: 浙江大学 邹伯敏 教授
2015/8/6 第七章 离散化控制系统 1
自动控制理论
第一节 引言
如果在系统中一次或几次的信号不是连续的模拟信号, 而是在时间上离散的脉冲或数码信号,这种系统称为离散化 控制系统。 由于这些离散信号是连续函数经采样后形成的,故又称 这类系统为采样控制系统。
14
自动控制理论
如用理想脉冲序列采样的离散化信号,其傅氏变换表达式
1 F * ( j ) F[ j ( k s )] T k
二、零阶保持器
把采样值按常数、线形函数和抛物线函数外推的保持器分 别称为零阶、一阶和二阶保持器。
图7-13
2015/8/6 第七章 离散化控制系统 15
PT (t )
k sin jk st 1 T 1 1 T ak 2T ee dt T 2 T k T
2015/8/6 第七章 离散化控制系统
k
jks t a e k
(7-4)
(7-5)
9
自动控制理论
其中, a k
1 T
若令 T 10
2015/8/6 第七章 离散化控制系统 24
自动控制理论
3、超前定理
证:
Z [ f (t kT )] Z F ( z ) Z
k
k
Z [ f (t kT )] f (nT kT ) z
k 0
f (nT ) z
k 0
k 1
n
n
Z
k
k 0
f (nT kT ) z ( k n )
F ( z)
1 1 e aT z 1
z z e aT
19
2015/8/6
第七章 离散化控制系统
自动控制理论
2、部分分式法 例7-3 求的 F ( s) 解:
a 的Z变换 s( s a) 1 1 F (s) s sa