FM352电子凸轮使用指南
电子凸轮说明书

兴世机械电子凸轮简要说明一.安全和注意1.注意事项本电子凸轮并不是完全的绝对值编码器,它在第一转(没有找到原点时)不会输出信号.2.安全操作请在完全了解明白该手册后,再安装和操作本电子凸轮.二.安装1.控制器安装直接嵌入面板安装,用配带的金属扣固定.2.编码器安装编码器用配套的联轴器安装,请保证编码器轴和设备驱动轴的同心度.三.接线1.接线端子位置:2.电源24V:24V供电电源.0V:电源公共端.3.编码器接线BLK: Black 黑色线RED:Red 红色线WHI: White 白色线A相脉冲+GRY:Grey 灰色线A相脉冲-BLU: Blue 蓝色线B相脉冲+BRN: Brown 棕色线B相脉冲-YLW: Yellow 黄色线Z相脉冲+GRN: Green 绿色线Z相脉冲-其它端子不用接线.如果需要更换电子凸轮旋转方向,请交换WHI和GRY(白色线和灰色线).4.输出信号接线COM:输出信号的公共点,每8个通道共用一个.并且每8个通道内部共用一个保险.0-31: 输出通道.NPN集电极开路输出,最高电压300V/最大电流150mA/最大功率100mW.5.控制信号接线24V:控制信号输入电源.ST:启动,当信号为ON时,控制使能输出,并可以设定参数.B0- B2:程序组选择信号.可以选择0-7程序组,如下表: 端子接0V时激活(ON),悬空不接或接24V无效(--).B0 B1 B2 NO.-- -- -- 0ON -- -- 1-- ON -- 2ON ON -- 3-- -- ON 4ON -- ON 5-- ON ON 6ON ON ON 7程序组信号在ST信号跳变沿读取.四.控制1.启动ST:启动信号,引脚为0V时激活.激活后读取程序组并使能凸轮输出.2.程序组切换先设定好B0-B2的程序组选择信号,再激活ST信号.五.触控面板:进入进角补偿的菜单。
:将变更的参数生效,并保存。
设定参数项改变,在程序时切换至ON/OFF,在进角补偿切换速度/ON的角度/OFF 的角度。
西门子PLC各种模块分类选型及用途
6ES7 211-0AA23-0XB0 CPU221 DC/DC/DC,6 输入/4 输出6ES7 211-0BA23-0XB0 CPU221 继电器输出,6 输入/4 输出6ES7 212-1AB23-0XB8 CPU222 DC/DC/DC,8 输入/6 输出6ES7 212-1BB23-0XB8 CPU222 继电器输出,8 输入/6 输出6ES7 214-1AD23-0XB8 CPU224 DC/DC/DC,14 输入/10 输出6ES7 214-1BD23-0XB8 CPU224 继电器输出,14 输入/10 输出6ES7 214-2AD23-0XB8 CPU224XP DC/DC/DC,14DI/10DO,2AI/1AO(PNP) 6ES7 214-2AS23-0XB8 CPU224XPsi DC/DC/DC,14DI/10DO,2AI/1AO(NPN) 6ES7 214-2BD23-0XB8 CPU224XP 继电器输出,14DI/10DO,2AI/1AO6ES7 216-2AD23-0XB8 CPU226 DC/DC/DC,24 输入/16 输出6ES7 216-2BD23-0XB8 CPU226 继电器输出,24 输入/16 输出扩展模块6ES7 221-1BH22-0XA8 EM221 16 入24VDC,开关量6ES7 221-1BF22-0XA8 EM221 8 入24VDC,开关量6ES7 221-1EF22-0XA0 EM221 8 入120/230VAC,开关量6ES7 222-1BF22-0XA8 EM222 8 出24VDC,开关量6ES7 222-1EF22-0XA0 EM222 8 出120V/230VAC,0.5A 开关量6ES7 222-1HF22-0XA8 EM222 8 出继电器6ES7 222-1BD22-0XA0 EM222 4 出24VDC 固态一MOSFET6ES7 222-1HD22-0XA0 EM222 4 出继电器干触点6ES7 223-1BF22-0XA8 EM223 4 入/4 出24VDC,开关量6ES7 223-1HF22-0XA8 EM223 4 入24VDC/4 出继电器6ES7 223-1BH22-0XA8 EM223 8 入/8 出24VDC,开关量6ES7 223-1PH22-0XA8 EM223 8 入24VDC/8 出继电器6ES7 223-1BL22-0XA8 EM223 16 入/16 出24VDC,开关量6ES7 223-1PL22-0XA8 EM223 16 入24VDC/16 出继电器6ES7 223-1BM22-0XA8 EM223 32 入/32 出24VDC,开关量6ES7 223-1PM22-0XA8 EM223 32 入24VDC/32 出继电器6ES7 231-0HC22-0XA8 EM231 4 入*12 位精度,模拟量6ES7 231-0HF22-0XA0 EM231 8 入*12 位精度,模拟量6ES7 231-7PB22-0XA8 EM231 2 入*热电阻,模拟量6ES7 231-7PC22-0XA0 EM231 4 入*热电阻,模拟量6ES7 231-7PD22-0XA8 EM231 4 入*热电偶,模拟量6ES7 231-7PF22-0XA0 EM231 8 入*热电偶,模拟量6ES7 232-0HB22-0XA8 EM232 2 出*12 位精度,模拟量6ES7 232-0HD22-0XA0 EM232 4 出*12 位精度,模拟量6ES7 235-0KD22-0XA8 EM235 4 入/1 出*12位精度,模拟量6ES7 277-0AA22-0XA0 EM277 PROFIBUS-DP 接口模块6ES7 253-1AA22-0XA0 EM253 位控模块6GK7 243-1EX01-0XE0 CP243-1 工业以太网模块6ES7 291-8GF23-0XA0 MC291,新CPU22x存储器盒,64K6ES7 297-1AA23-0XA0 CC292,CPU22x 时钟/ 日期电池盒6ES7 291-8BA20-0XA0 BC293,CPU22x 电池盒6ES7 290-6AA20-0XA0 扩展电缆,1/0 扩展,0.8 米,CPU22x/EM6ES7 901-3CB30-0XA0编程/通讯电缆,PC/PPI,带光电隔离,5-开关,5m6ES7 901-3DB30-0XA0编程/通讯电缆,PC/PPI,带光电隔离,USB接口,5-开关6ES7 292-1AD20-0AA0 CPU22x/EM端子连接器块,7个端子,可拆卸6ES7 292-1AE20-0AA0 CPU22x/EM端子连接器块,12个端子,可拆卸6ES7 292-1AG20-0AA0 CPU22x/EM 连接器块,18 个端子,可拆卸6AV6 640-0AA00-0AX0 TD400C 文本显示器6EP1 332-1SH31 专为S7-200 设计电源,24V/3.5A 可并联5个6ES7 810-2CC03-0YX0 STEP 7-Micro/Win32 V4.0 包含SP6升级包电源模板6ES7 307-1BA01-0AA0 电源模块(2A)6ES7 307-1EA01-0AA0 电源模块(5A)6ES7 307-1KA02-0AA0 电源模块(10A)CPU6ES7 312-1AE14-0AB0 CPU312,32K 内存6ES7 312-5BF04-0AB0 CPU312C,64K 内存10DI/6DO6ES7 313-5BG04-0AB0 CPU313C,128K 内存24DI/16DO / 4AI/2AO6ES7 313-5BG04-9AM0 CPU313C,128K 内存24DI/16DO / 4AI/2AO( 组合件)( 6ES7313- 5BF03-0AB0+2*6ES7 392-1AM00-0AA0 )6ES7 313-6BG04-0AB0 CPU313C-2PTP, 128K 内存16DI/16DO6ES7 313-6CG04-0AB0 CPU313C-2DP, 128K 内存16DI/16DO6ES7 313-6CG04-9AM0 CPU313C-2DP,128K 内存16DI/16DO (6ES7 313-6CF03-0AB0+6ES7 392-1AM00-0AA0)6ES7 314-1AG14-0AB0 CPU314,128K 内存6ES7 314-6BH04-0AB0 CPU314C-2PTP 192K 内存24DI/16DO / 4AI/2AO6ES7 314-6CH04-0AB0 CPU314C-2DP 192K 内存24DI/16DO / 4AI/2AO6ES7 314-6CH04-9AM0 CPU314C-2DP 192K 内存24DI/16DO / 4AI/2AO ( 6ES7314- 6CG03-0AB0+2*6ES7 392-1AM00-0AA0)6ES7 315-2AH14-0AB0 CPU315-2DP, 256K 内存6ES7 315-2EH14-0AB0 CPU315-2 PN/DP, 384K 内存6ES7 317-2AK14-0AB0 CPU317-2DP,1M 内存6ES7 317-2EK14-0AB0 CPU317-2 PN/DP,1MB 内存6ES7 318-3EL01-0AB0 CPU319-3 PN/DP,2M 内存内存卡6ES7 953-8LF20-0AA0 SIMATIC Micro 6ES7 953-8LG20-0AA0 SIMATIC Micro 6ES7 953-8LJ30-0AA0 SIMATIC Micro 内存卡64kByte(MMC) 内存卡128KByte(MMC) 内存卡512KByte(MMC)6ES7 953-8LL20-0AA0 SIMATIC Micro 6ES7 953-8LM20-0AA0 SIMATIC Micro 6ES7 953-8LP20-0AA0 SIMATIC Micro 开关量模板6ES7 321-1BH02-0AA0 开入模块( 16 点, 24VDC ) 6ES7 321-1BH02-9AJ0 开 入 模 块 ( 16 点 , 24VDC ) 组 合 件 (6ES7 321-1BH02-0AA0+6ES7 392-1AJ00-0AA0)6ES7 321-1BH10-0AA0 开入模块( 16 点, 24VDC )6ES7 321-1BH50-0AA0 开入模块(16 点,24VDC 源输入)6ES7 321-1BH50-9AJ0 开入模块(16 点,24VDC 源输入)组合件(6ES7 321-1BH50-0AA0+6ES7 392-1AJ00-0AA0)6ES7 321-1BL00-0AA0 开入模块( 32点, 24VDC )6ES7 321-1BL00-9AM0 开入模块(32 点,24VDC ) 组合件(6ES7 321-1BL00-0AA0+6ES7 392-1AM00-0AA0)6ES7 321-7BH01-0AB0 开入模块(16 点,24VDC 诊断能力)392-1AJ00-0AA0) 6ES7 321-1CH00-0AA0 开入模块( 16点, 24/48VDC )6ES7 321-1CH20-0AA0 开入模块(16 点,48/125VDC )6ES7 321-1BP00-0AA0 开入模块( 64点, 24VDC )6ES7 322-1BH01-0AA0 开出模块( 16点, 24VDC ) 392-1AJ00-0AA0)6ES7 322-1BH10-0AA0 开出模块(16 点,24VDC 高速 6ES7 322-1CF00-0AA0 开出模块( 8点, 48-125VDC )6ES7 322-8BF00-0AB0开出模块(8点,24VDC 诊断能力6ES7 322-5GH00-0AB0开出模块(16点,24VDC 独立接点,故障保护)6ES7 322-1BL00-0AA0 开出模块( 32 点, 24VDC )6ES7 322-1BL00-9AM0 开 出 模 块 ( 32 点 , 24VDC ) (6ES7322-1BL00-0AA0+6ES7 392-1AM00-0AA0)6ES7 322-1FL00-0AA0 开出模块( 32 点, 120VAC/230VAC )6ES7 322-1BF01-0AA0 开出模块( 8点, 24VDC , 2A )6ES7 322-1FF01-0AA0 开出模块( 8点, 120V/230VAC )6ES7 322-5FF00-0AB0 开出模块(8 点,120V/230VAC,独立接点)6ES7 322-1HF01-0AA0 开出模块(8 点,继电器,2A )6ES7 322-1HF01-9AJ0 开 出 模 块 ( 8 点 , 继 电 器 ,2A ) (6ES7 322-1HF01-0AA0+6ES7 392-1AJ00-0AA0)6ES7 322-1HF10-0AA0开出模块(8点,继电器,5A ,独立接点) 6ES7 322-1HH01-0AA0 开出模块 (16 点, 继电器)内存卡 2MByte(MMC )内存卡 4MByte(MMC )6ES7 321-1EL00-0AA0 开入模块( 32 点, 120VAC ) 6ES7 321-1FF01-0AA0 开入模块( 8 点, 6ES7 321-1FF10-0AA0 开入模块( 8 点, 120/230VAC )120/230VAC )与公共电位单独连接6ES7 321-1FH00-0AA0 开入模块( 16点, 120/230VAC )6ES7 321-1FH00-9AJ0 开 入 模 块 ( 16 点,八、120/230VAC ) (6ES7 321-1FH00-0AA0+6ES7 6ES7 322-1BH01-9AJ0 开 出 模 块 ( 16 点 24VDC ) (6ES7 322-1BH01-0AA0+6ES7模拟量模板6ES7 331-7KF02-0AB0 模拟量输入模块 (8 路,多种信号 )392-1AJ00-0AA0)6ES7 331-7KB02-0AB0 模拟量输入模块 (2 路,多种信号 )6ES7 331-7KB02-9AJ0模 拟量输入模块(2 路,多 种信号)(6ES7392-1AJ00-0AA0)6ES7 331-7NF00-0AB0 模拟量输入模块 (8 路, 15 位精度)6ES7 331-7NF00-9AM0 模拟量输入模块(8 路,15 位精度)(6ES7 331-7NF00-0AB0+6ES7 392-1AM00-0AA0)6ES7 331-7NF10-0AB0 模拟量输入模块 (8 路, 15位精度)4 通道模式6ES7 331-7HF01-0AB0 模拟量输入模块 (8 路, 14位精度,快速 )6ES7 331-1KF02-0AB0 模拟量输入模块 (8 路, 13 位精度)6ES7 331-1KF02-9AM0 模 拟量输 入模块(8 路,13 位精度)(6ES7 331-1KF02-0AB0+6ES7 392-1AM00-0AA0)6ES7 331-7PF01-0AB0 8 路模拟量输入 ,16 位,热电阻6ES7 331-7PF01-9AM0 8 路模拟 量输入,16 位,热电阻(6ES7 331-7PF01-0AB0+6ES7392-1AM00-0AA0)6ES7 331-7PF11-0AB0 8 路模拟量输入 ,16 位,热电偶6ES7 331-7PF11-9AM0 8 路模拟 量输入,16 位,热电偶(6ES7 331-7PF11-0AB0+6ES76ES7 334-0KE00-0AB0模拟量输入(4路RTD )/模拟量输出(2路)6ES7 334-0CE01-0AA0 模拟量输入 (4 路)/模拟量输出( 2路)6ES7 322-1HH01-9AJ0 392-1AJ00-0AA0)6ES7 322-5HF00-0AB0 6ES7 322-1FH00-0AA0 6ES7 322-1BP00-0AA0 开出模开出模块( 开出模块( 开出块 (16 点 , 继 电 器 )(6ES7 322-1HH01-0AA0+6ES7 6ES7 323-1BH01-0AA0 8 点输入, 6ES7 323-1BL00-0AA0 16 点输入, 6ES7 323-1BL00-9AM0 16 点 输 323-1BL00-0AA0+6ES7 392-1AM00-0AA0)8 点 , 继电器 ,5A ,故障保护)16 点, 120V/230VAC )64 点, 24VDC )24VDC 8点输出,24VDC 模块24VDC 16 点输出,24VDC 模块入 , 24VDC ; 16 点 输 出 , 24VDC 模 块 (6ES7 6ES7 331-7KF02-9AJ0 模 拟量 输入 模块 (8 路, 多种 信号 ) (6ES7 331-7KF02-0AB0+6ES7 331-7KB02-0AB0+6ES7392-1AM00-0AA0)6ES7 332-5HD01-0AB0 6ES7 332-5HD01-9AJ0 6ES7 332-5HB01-0AB0 6ES7 332-5HB01-9AJ0 6ES7 332-5HF00-0AB0 6ES7 332-5HF00-9AM0 6ES7 332-7ND02-0AB0模拟输出模块 模拟输出模块 模拟输出模块 模拟输出模块 模拟输出模块 模拟输出模块 (4 (4 (2 (2 (8 (8 路)路)(6ES7 332-5HD01-0AB0+6ES7 392-1AJ00-0AA0) 路)路)(6ES7 332-5HB01-0AB0+6ES7 392-1AJ00-0AA0) 路) 路)(6ES7 332-5HF00-0AB0+6ES7 392-1AM00-0AA0) 模拟量输出模块 (4 路, 15位精度)附件6ES7 365-0BA01-0AA0 IM365 接口模块6ES7 360-3AA01-0AA0 IM360 接口模块6ES7 361-3CA01-0AA0 IM361 接口模块6ES7 392-1AJ00-0AA0 20 针前连接器6ES7 392-1AM00-0AA0 40 针前连接器6ES7 390-0AA00-0AA0 SIMATIC S7-300 ,总线连接器 功能模板6ES7 350-1AH03-0AE0 FM350-1 计数器功能模块6ES7 350-2AH01-0AE0 FM350-2 计数器功能模块6ES7 351-1AH02-0AE0 FM351 定位功能模块6ES7 352-1AH02-0AE0 FM352 电子凸轮控制器 +组态包光盘6ES7 355-0VH10-0AE0 FM355C 闭环控制模块6ES7 355-1VH10-0AE0 FM355S 闭环控制系统6ES7 355-2CH00-0AE0 FM355-2C 闭环控制模块6ES7 355-2SH00-0AE0 FM355-2S 闭环控制模块6ES7 338-4BC01-0AB0 SM338 绝对位置输入模块6ES7 352-5AH01-0AE0 FM352-5 高速布尔处理器6ES7 352-5AH11-0AE0 FM352-5 高速布尔处理器通讯模板6ES7 870-1AB01-0YA0 可装载驱动 6ES7 902-1AB00-0AA0 RS232 电缆 5m6ES7 902-1AC00-0AA0 RS232 电缆 10m 6ES7 368-3BB01-0AA0 6ES7 368-3BC51-0AA0 6ES7 368-3BF01-0AA06ES7 368-3CB01-0AA0 6ES7 390-1AB60-0AA0 6ES7 390-1AE80-0AA0 6ES7 390-1AF30-0AA0 6ES7 390-1AJ30-0AA0 6ES7 390-1BC00-0AA0 连接电缆 (1 米 ) 连接电缆 (2.5 米 ) 连接电缆 (5 米 ) 连接电缆 (10 米 )导轨 (160mm)导轨 (480mm) 导轨(530mm) 导轨(830mm) 导轨(2000mm)6ES7 392-4BB00-0AA0 S7-300 6ES7 392-4BC50-0AA0 S7-300 6ES7 392-4BF00-0AA0 S7-300 6ES7 392-1AN00-0AA0 S7-300 个 6ES7 392-1BN00-0AA0 S7-300个 连接电缆,用于 64 通道模块,连接电缆,用于 64 通道模块,连接电缆,用于 64 通道模块, ,端子排,带螺钉型端子,用于长:1M 一包2个 长:2.5M ,一包2个 长:5M 一包2个 S7-300 64 通道模块,一包 2 S7-300 64 通道模块,一包 2 6ES7 340-1AH02-0AE0 CP340 6ES7 340-1BH02-0AE0 CP340 6ES7 340-1CH02-0AE0 CP3406ES7 341-1AH02-0AE0 CP341 6ES7 341-1BH02-0AE0 CP341 6ES7 341-1CH02-0AE0 CP341 通讯处理器( RS232) 通讯处理器( 20mA/TTY ) 通讯处理器( RS485/RS422)通讯处理器( RS232)通讯处理器( 20mA/TTY ) 通讯处理器( RS485/RS422)MODBUS RTl 从站6ES7 870-1AA01-0YA0 可装载驱动MODBUS RTl主站6ES7 902-1AD00-0AA0 RS232 电缆15m 6ES7 902-2AB00-0AA0 20mA/TTY 电缆5m6ES7 902-2AC00-0AA0 20mA/TTY 电缆10m6ES7 902-2AG00-0AA0 20mA/TTY 电缆50m 6ES7 902-3AB00-0AA0 RS485/RS422 电缆5m6ES7 902-3AC00-0AA0 RS485/RS422 电缆10m6ES7 902-3AG00-0AA0 RS485/RS422 电缆50m 6GK7 342-5DA02-0XE0 CP342-5 通讯模块6GK7 342-5DF00-0XE0 CP342-5 光纤通讯模块6GK7 343-5FA01-0XE0 CP343-5 通讯模块6GK7 343-1EX30-0XE0 CP343-1 以太网通讯模块6GK7 343-1CX10-0XE0 CP343-1 以太网通讯模块6GK7 343-1GX30-0XE0 CP343-1 IT 以太网通讯模块( 支持PROFINET) 6ES7 312-1AE13-0AB0 CPU312 , 32K 内存6ES7 315-2AG10-0AB0 CPU315-2DP, 128K 内存6ES7 315-2EH13-0AB0 CPU315-2 PN/DP, 256K 内存6ES7 317-2EK13-0AB0 CPU317-2 PN/DP,1MB 内存6ES7 318-3EL00-0AB0 CPU319-3 PN/DP,1.4M 内存6ES7 353-1AH01-0AE0 FM353 定位功能模块6ES7 354-1AH01-0AE0 FM354 定位功能模块6ES7 357-4AH01-0AE0 FM357-2 定位功能模块6ES7 312-5BE03-0AB0 CPU312C, 32K 内存10DI/6DO6ES7 313-5BF03-0AB0 CPU313C, 64K 内存24DI/16DO / 4AI/2AO6ES7 313-5BF03-9AM0 CPU313C,64K 内存24DI/16DO / 4AI/2AO( 组合件)( 6ES7313- 5BF03-0AB0+2*6ES7 392-1AM00-0AA0 )6ES7 313-6BF03-0AB0 CPU313C-2PTP, 64K 内存16DI/16DO6ES7 313-6CF03-0AB0 CPU313C-2DP, 64K 内存16DI/16DO6ES7 313-6CF03-9AM0 CPU313C-2DP,64K 内存16DI/16DO(6ES7 313-6CF03-0AB0+6ES7 392-1AM00-0AA0)6ES7 314-6BG03-0AB0 CPU314C-2PTP 96K 内存24DI/16DO / 4AI/2AO6ES7 314-6CG03-0AB0 CPU314C-2DP 96K 内存24DI/16DO / 4AI/2AO6ES7 314-6CG03-9AM0 CPU314C-2DP 96K 内存24DI/16DO / 4AI/2AO ( 6ES7314- 6CG03-0AB0+2*6ES7 392-1AM00-0AA0)6ES7 315-2AG10-0AB0 CPU315-2DP, 128K 内存6ES7 317-2AJ10-0AB0 CPU317-2DP,512K 内存电源模块6ES7 407-0DA02-0AA0 电源模块(4A)6ES7 407-0KA02-0AA06ES7 407-0KR02-0AA06ES7 407-0RA02-0AA06ES7 405-0DA02-0AA06ES7 405-0KA02-0AA06ES7 405-0RA02-0AA06ES7 971-0BA00 备用电池 CPU6ES7 412-3HJ14-0AB0 CPU 412-3H; 512KB 程序内存 /256KB 数据内存6ES7 414-4HM14-0AB0 CPU 414-4H; 冗余热备 CPU 2.8 MB RAM6ES7 417-4HT14-0AB0 CPU 417-4H; 冗余热备 CPU 30 MB RAM6ES7 400-0HR00-4AB0 CPU 417-4H; 冗余热备 CPU 30 MB RAM6ES7 400-0HR50-4AB0 412H 系统套件包括 2 个CPU 1个H 型中央机架、2个电源、2个1M 存储卡、 4个同步模块、 2 根同步电缆,以及 4 个备用电池 (PS405 10A)6ES7 412-1XJ05-0AB0 CPU412-1,144KB 程序内存 /144KB 数据内存6ES7 412-2XJ05-0AB0 CPU412-2,256KB 程序内存 /256KB 数据内存6ES7 412-2EK06-0AB0 CPU412-2PN/DP,0.5M 程序内存 /0.5M 数据内存6ES7 414-2XK05-0AB0 CPU414-2,512KB 程序内存 /512KB 数据内存6ES7 414-3XM05-0AB0 CPU414-3,1.4M 程序内存 /1.4M 数据内存 1 个 IF 模板插槽6ES7 414-3EM06-0AB0 CPU414-3PN/DP 2M 程序内存/2M 数据内存1个IF 模板插槽 6ES7 416-2XN05-0AB0 CPU416-2,2.8M 程序内存 /2.8M 数据内存6ES7 416-3XR05-0AB0 CPU416-3,5.6M 程序内存 /5.6M 数据内存 1 个 IF 模板插槽6ES7 416-3ES06-0AB0 CPU416-3PN/DP 8M 程序内存 /8M 数据内存 1 个 IF 模板插槽 6ES7 416-2FN05-0AB0 CPU416F-2,2.8M 程序内存 /2.8M 数据内存6ES7 416-3FR05-0AB0 CPU416F-3PN/DP,5.6M 程序内存 /5.6M 数据内存6ES7 417-4XT05-0AB0 CPU417-4,15M 程序内存 /15M 数据内存内存卡6ES7 952-0AF00-0AA0 64K 字节 RAM6ES7 952-1AH00-0AA0 256K 字节 RAM6ES7 952-1AK00-0AA0 1M 字节 RAM6ES7 952-1AL00-0AA0 2M 字节 RAM6ES7 952-1AM00-0AA0 4M 字节 RAM6ES7 952-1AP00-0AA0 8M 字节 RAM6ES7 952-1AS00-0AA0 16M 字节 RAM6ES7 952-1AY00-0AA0 64M 字节 RAM6ES7 952-0KF00-0AA0 64K 字节 FLASH EPROM6ES7 952-0KH00-0AA0 256K 字节 FLASH EPROM6ES7 952-1KK00-0AA0 1M 字节 FLASH EPROM6ES7 952-1KL00-0AA0 2M 字节 FLASH EPROM6ES7 952-1KM00-0AA0 4M 字节 FLASH EPROM6ES7 952-1KP00-0AA0 8M 字节 FLASH EPROM6ES7 952-1KS00-0AA0 16M 字节 FLASH EPROM6ES7 952-1KT00-0AA0 32M 字节 FLASH EPROM6ES7 952-1KY00-0AA0 64M 字节 FLASH EPROM电源模块 电源模块 电源模块 电源模块 电源模块 电源模块(10A) (10A) 冗余 (20A) (4A) (10A) (20A)开关量输入模板6ES7 421-1BL01-0AA0 开关量输入模块(32 点,24VDC)6ES7 421-1EL00-0AA0 开关量输入模块6ES7 421-1FH20-0AA0 开关量输入模块6ES7 421-7BH01-0AB0 开关量输入模块6ES7 421-7DH00-0AB0 开关量输入模块开关量输出模板(32 点,120VUC)(16 点,120/230VUC) (16 点,24VDC)中断(16 点,24V 到60VUC)6ES7 422-1BH11-0AA0 开关量输出模块(16 点,24VDC,2A)6ES7 422-1BL00-0AA0 32 点输出,6ES7 422-7BL00-0AB0 32 点输出,6ES7 422-1FH00-0AA0 16 点输出,24VDC,0.5A24VDC,0.5A, 中断120/230VAC,2A6ES7 422-1HH00-0AA0 16 点输出,继电器,5A模拟量模块6ES7 431-0HH00-0AB0 16 路模拟输入,13 位6ES7 431-1KF00-0AB0 8 路模拟输入,13 位,隔离6ES7 431-1KF10-0AB0 8 路模拟输入,14位,隔离,线性化6ES7 431-1KF20-0AB0 8 路模拟输入,6ES7 431-7KF00-0AB0 8 路模拟输入,6ES7 431-7KF10-0AB0 8 路模拟输入,14位,隔离1 6位,隔离,热电偶1 6位,隔离,热电阻6ES7 431-7QH00-0AB0 16 路模拟输入,16 位,隔离6ES7 432-1HF00-0AB0 8 路模拟输出,13 位,隔离功能模板6ES7 450-1AP00-0AE0 FM450-1 计数器模板6ES7 451-3AL00-0AE0 FM451 定位模板6ES7 452-1AH00-0AE0 FM452 电子凸轮控制器6ES7 453-3AH00-0AE0 FM453 定位模板6ES7 455-0VS00-0AE0 FM455C 闭环控制模块6ES7 455-1VS00-0AE0 FM455S 闭环控制模块6DD1 607-0AA2 FM 458-1DP 快速处理系统6ES7 953-8LJ20-0AA0 用于FM458-1DP 基本模板512KByte(MMC) 6ES7 953-8LL20-0AA0 用于FM458-1DP 基本模板2MByte(MMC) 6ES7 953-8LM20-0AA0 用于FM458-1DP 基本模板4MByte(MMC)6DD1 607-0CA1 EXM 438-1 I/O 扩展模板6DD1 607-0EA0 EXM 448 通讯扩展模板6DD1 607-0EA2 EXM 448-2 通讯扩展模板6DD1 681-0AE2 SB1 0端子模块6DD1 681-0AF4 SB60端子模块6DD1 681-0AG2 SB70端子模块6DD1 681-0AJ1 SU12端子模块6DD1 681-0DH1 SB71 端子模块6DD1 681-0EB3 SB61 端子模块6DD1 681-0GK0 SU13端子模块6DD1 684-0GC0 SC62连接电缆6DD1 684-0GD0 SC63连接电缆6ES7 400-1JA01-0AA0 主板(9 槽)UR26ES7 400-2JA00-0AA0 UR2-H主板( 18 槽) 6ES7 400-2JA10-0AA0 UR2-H 主板(18槽)铝板6ES7 401-1DA01-0AA0 CR3 机架(4 槽) 6ES7 401-2TA01-0AA0 CR2 主板(18槽) 6ES7 403-1TA01-0AA0 ER1 机架(18槽) 6ES7 403-1JA01-0AA0 ER2 机架(9槽) 6ES7 403-1TA11-0AA0 ER1 机架( 1 8槽)铝板 6ES7 403-1JA11-0AA0 ER2 机架(9槽)铝板 6ES7 460-0AA01-0AB0 IM460-0 6ES7 461-0AA01-0AA0 IM461-06ES7 461-0AA00-7AA0 终端器6ES7 468-1AH50-0AA0 连接电缆 (0.75 米)6ES7 468-1BB50-0AA0 连接电缆 (1.5 米)6ES7 460-1BA01-0AB0 IM460-1 6ES7 461-1BA01-0AA0 IM461-16ES7 468-3AH50-0AA0 468-3 连接电缆 (0.75 米)6ES7 468-3BB50-0AA0 468-3 连接电缆 (1.5 米)6ES7 460-3AA01-0AB0 IM460-3 6ES7 461-3AA01-0AA0 IM461-36ES7 461-3AA00-7AA0 终端器 6ES7 468-1BF00-0AA0 468-1 连接电缆( 5 米)6ES7 468-1CB00-0AA0 468-1 连接电缆( 10 米) 6DD1 684-0GE0 SC64 连接电缆 通讯模板 6ES7 440-1CS00-0YE0 CP440 通讯处理器 6ES7 441-1AA04-0AE0 CP441-1 通讯处理器6ES7 441-2AA04-0AE0 CP441-2 通讯处理器 6ES7 963-1AA00-0AA0 RS232C 接口模板 6ES7 963-2AA00-0AA0 20mA 接口模板 6ES7 963-3AA00-0AA0 RS422/485 接口模板 6ES7 870-1AA01-0YA0 可装载驱动 MODBUS RTL 主站6ES7 870-1AB01-0YA0 可装载驱动 MODBUS RTI 从站 6GK7 443-5FX02-0XE0 CP443-5 基本型通讯处理器 , 支持 Profibus-Fms 协议 6GK7 443-5DX04-0XE0 CP443-5 扩展型通讯处理器 , 支持 Profibus-DP 协议6GK7 443-1EX20-0XE0 CP443-1 以太网通讯处理器 6GK7 443-1GX20-0XE0 CP443-1 高级以太网通讯处理器附件 6ES7 960-1AA04-0XA0 冗余系统同步模板(新)近距离同步( 6ES7 960-1AB04-0XA0 冗余系统同步模板(新)远程同步模板( 的光缆) 6ES7 960-1AA04-5AA0 冗余系统光纤连接电缆( 1 米)(新) 6ES7 960-1AA04-5BA0 冗余系统光纤连接电缆( 2米)(新)6ES7 960-1AA04-5KA0 冗余系统光纤连接电缆( 1 0米)(新) 6ES7 833-1CC01-0YA5 S7F 系统可选软件包 1 0米以内) 10 米到 10 公里,用同长度 6ES7 833-1CC00-6YX0 F 运行授权 6ES7 197-1LA04-0XA0 Y-LINK6ES7 492-1AL00-0AA0 前连接器6ES7 400-1TA01-0AA0 主板(18槽)UR1 6ES7 400-1TA11-0AA0 主板 (18 槽)铝板 6ES7 400-1JA11-0AA0 主板(9 槽)铝板6ES7 468-1CC50-0AA0 468-1 连接电缆(25 米)6ES7 468-1CF00-0AA0 468-1 连接电缆(50 米)6ES7 468-1DB00-0AA0 468-1 连接电缆(100 米)6ES7 463-2AA00-0AA0 IM463-2 接口模块6ES7 964-2AA04-0AB0 IF-964 DP 接口模块6ES7 414-3EM05-0AB0 CPU414-3PN/DP 1.4M 程序内存/1.4M 数据内存 1 个IF 模板插槽6ES7 416-3ER05-0AB0 CPU416-3PN/DP 5.6M 程序内存/5.6M 数据内存1 个IF 模板插槽CPU 6ES7 211-1AD30-0XB06ES7 211-1BD30-0XB06ES7 211-1HD30-0XB06ES7 212-1AD30-0XB06ES7 212-1BD30-0XB06ES7 212-1HD30-0XB06ES7 214-1AE30-0XB06ES7 214-1BE30-0XB06ES7 214-1HE30-0XB0DI/DO6ES7 221-1BF30-0XB06ES7 221-1BH30-0XB06ES7 222-1BF30-0XB06ES7 222-1BH30-0XB06ES7 222-1HF30-0XB06ES7 222-1HH30-0XB06ES7 223-1BH30-0XB06ES7 223-1PH30-0XB06ES7 223-1PL30-0XB06ES7 223-1BL30-0XB0AI/AO6ES7 231-4HD30-0XB06ES7 231-4HF30-0XB06ES7 232-4HB30-0XB06ES7 232-4HD30-0XB0 6ES7 234-4HE30-0XB0 6ES7 231-5PD30-0XB0 6ES7 231-5QD30-0XB0 SB6ES7 223-0BD30-0XB0 6ES7 232-4HA30-0XB0 CP6ES7 241-1AH30-0XB0 6ES7 241-1CH30-0XB0 SIM 6ES7 274-1XF30-0XA0 6ES7 274-1XH30-0XA0 存储卡 6ES7 954-8LB00-0AA06ES7 954-8LF00-0AA0 编程软件 6ES7 822-0AA00-0YA0 其它 6GK7 277-1AA10-0AA06EP1 332-1SH71 6ES7 290-6AA30-0XA0 6AV6 640-0BA11-0AX0 OP 73 micro s7-200 系列用 6AV6 640-0CA11-0AX1 TP177 micro 触摸式 s7-200 系列用 6AV6 648-0AC11-3AX0 Smart 700 彩色 7 寸 s7-200 系列用 6AV6 648-0AE11-3AX0 Smart 1000 彩色 10.2 寸 s7-200 系列用 6AV6 641-0AA11-0AX0 OP 73 单色 3 英寸 6AV6 641-0BA11-0AX1 OP 77A 单色 4.5 英寸 6AV6 641-0CA01-0AX1 OP 77B 单色 4.5 英寸6AV6 642-0BD01-3AX0 TP 177B 4.3" TFT 宽屏, 256 色, 2 MB 用户内存 6AV6 642-0AA11-0AX1 TP 177A 单色 5.7 英寸 6AV6 642-0BC01-1AX1 TP 177B DP 单色 5.7 英寸 6AV6 642-0BA01-1AX1 TP 177B PN/DP 彩色 5.7 英寸 6AV6 642-0DC01-1AX1 OP 177B DP 单色 5.7 英寸 6AV6 642-0DA01-1AX1 OP 177B PN/DP 彩色 5.7 英寸6AV6 643-0BA01-1AX0 OP 277-6 操作员面板 ,5.7 寸彩色中文显示 6AV6 643-0AA01-1AX0 TP277-6 触摸式面板 ,5.7 寸彩色中文显示" Touch , TFT 64K 色 触摸式面板, 8 寸 64K 色中文 按键式面板 ,8 寸 64K 色中文显示 触摸式面板, 10 寸 64K 色中文 按键式面板 ,10 寸 64K 色中文显示 触摸式面板, 12 寸 64K 色中文 触摸式面板, 15 寸 64K 色中文6AV6 642-0EA01-3AX0 MP177 5.7 6AV6 643-0CB01-1AX1 MP277-8 6AV6 643-0DB01-1AX1 MP277-8 6AV6 643-0CD01-1AX1 MP277-10 6AV6 643-0DD01-1AX1 MP277-10 6AV6 644-0AA01-2AX0 MP377-12 6AV6 644-0AB01-2AX0 MP377-156AV6 644-0AC01-2AX1 MP377-19 触摸式面板, 19 寸 64K 色中文 6AV6 644-0BA01-2AX1 MP377-12 按键式面板 ,12 寸 64K 色中文显示 6AV6 647-0AA11-3AX0 SIMATIC KTP400 Basic mono PN 3.8"4 以太网接口6AV6 647-0AB11-3AX0 SIMATIC KTP600 Basic color PN 5,7"6 以太网接口6AV6 647-0AC11-3AX0 KTP600 Basic color DP5.7" 256 色, 接口6AV6 647-0AD11-3AX0 SIMATIC 以太网接口6AV6 647-0AE11-3AX0 SIMATIC MPI/PROFIBUS DP 接口 6AV6 647-0AF11-3AX0 SIMATICKTP600Basic color PN5,7" KTP1000 基本色 KTP1000 基本色 DP 10.4" PN 10,4" 以太网接口6AV6 647-0AG11-3AX0 SIMATIC TP1500 基本色 PN 15.0" 以太网接口 6 个功能键, 6 个功能键 ,8 个功能键 ,8 个功能键MPI/Profi TFT 显示屏, TFT 显示器, bus 256 256 DP TFT 显示器,256 色,无功能键 TFT 显示器, 256 色, 6AV6 671-1CB00-0AX2 MMC 存储卡 128 MB 用于 OP77B, OP/TP 177B, MOBILEPANEL177 6AV2124-2DC01-0AX0 KTP400 Comfort 4.3 寸, 1600 万色 LED 背光, 16:9 宽屏显示,键 控 + 触摸, 4 MB 用户内存 6AV2124-1DC01-0AX0 6AV2124-0GC01-0AX0 12 MB 用户内存 6AV2124-1GC01-0AX0 12 MB 用户内存6AV2124-0JC01-0AX0 12 MB 用户内存 6AV2124-1JC01-0AX0 12 MB 用户内存 6AV2124-0MC01-0AX0 屏,12 MB 用户内存 6AV2124-1MC01-0AX0 KP400 Comfort 4.3 寸, 1600 万色 LED 背光, 16:9 宽屏显示,键控 TP700 Comfort 7 寸,1600 万色 LED 背光,16:9 宽屏显示,触摸屏, KP700 Comfort 7 寸,1600 万色 LED 背光, 16:9 宽屏显示,键控, TP900 Comfort 9 寸,1600 万色 LED 背光,16:9 宽屏显示,触摸屏, KP900 Comfort 9 寸,1600 万色 LED 背光, 16:9 宽屏显示,键控,TP1200 Comfort 12 寸, 1600 万色 LED 背光, 16:9 宽屏显示,触摸KP1200 Comfort 12 寸,1600 万色 LED 背光,16:9 宽屏显示,键控, 12 MB 用户内存 6AV6 671-8XB10-0AX1 SD Card 512MB 6ES7 648-0DC50-0AA0 USB stick 8G 6AV6 545-0BA15-2AX0 TP170A 触摸式面板 6AV6 545-0BB15-2AX0 TP170B 触摸式面板 ,5.7 寸单色中文显示 6AV6 545-0BC15-2AX0 TP170B 触摸式面板 ,5.7 寸彩色中文显示 6AV6 542-0BB15-2AX0 OP170B 操作员面板,5.7 寸单色中文显示 6AV6 545-0CA10-0AX0 TP270-6 触摸式面板 ,5.7 寸彩色中文显示 6AV6 545-0CC10-0AX0 TP270-10 触摸式面板 ,10.4 寸彩色中文显示 6AV6 542-0CA10-0AX0 OP270-6 操作员面板 ,5.7 寸彩色中文显示6AV6 542-0CC10-0AX0 OP270-10 操作员面板 ,10.4 寸彩色中文显示个功能键 mono STN 显示屏,个功能键 TFT 显示屏,单色6AV6 542-0AG10-0AX0 MP270B 按键式面板,10.4 寸彩色中文显示6AV6 545-0AH10-0AX0 MP270B-6 触摸式面板,5.7 寸彩色中文6AV6 545-0AG10-0AX0 MP270B-10 触摸式面板,10.4 寸彩色中文显示6AV6 542-0DA10-0AX0 MP370 按键式面板,12 寸256 色中文显示6AV6 545-0DA10-0AX0 MP370 触摸式面板,12 寸256 色中文显示6AV6 545-0DB10-0AX0 MP370 触摸式面板,15 寸256 色中文显示6AV6 574-2AC00-2AA1 CF 存储卡512 MB6ES7 648-0DC30-0AA0 USB stick 1G6ES7 648-0DC40-0AA0 USB stick 2G6AV6 640-0DA11-0AX0 K-TP 178 micro s7-200 系列用6EP1 331-5BA00 单相220VAC输入,输出24VDC 0.6A6EP1 331-5BA10 单相220VAC输入,输出24VDC 1.3A6EP1 321-5BA00 单相 220VAC输入,输出12VDC 2A6EP1 331-1SH03 单相220VAC输入,输出24VDC 1.3A6EP1 332-2BA00 单相220VAC输入,输出24VDC 3.8A6EP1 332-2BA10 6EP1 333-2AA01 6EP1 333-2BA01 6EP1 333-3BA00 6EP1 334-2AA01 6EP1 334-2BA01 6EP1 334-3BA00 6EP1 336-3BA006EP1 6EP1 337-3BA00436-2BA10 6EP1 436-3BA00 6EP1 437-3BA00457-3BA00 6EP1SITOP facets 单相单相单相单相单相单相单相单相单相三相三相三相三相120/220VAC 输入,输出24VDC 2.5A 120/230VAC 输入,输出24VDC 5A 120VAC/220VAC俞入,输出24VDC 5A 120VAC/220to500VAC 输入,输出24VDC 5A 120/220VAC输入,输出24VDC , 10A,工业可并联10A工业可并联220VAC输入,输出24VDC120/220VACto500VAC 输入,输出24VDC , 10A220VAC输入,120/230,40A380VAC输入,380VAC输入,380VAC输入,380VAC输入,输出输出输出输出输出24VDC 20A 工业可并联24VDC ,20A24VDC,24VDC,48VDC,20A40A20A,工业可并联新型模块式电源工业可并联工业可并联6EP1 333-1AL12 单相单相120/230VAC 输入,输出120/230VAC 输入,输出6EP1 334-1AL126ES7 307-1EA80-0AA0 单相120/230VAC 输入,6EP1 353-2BA00 单相120/230VAC 输入,输出LOGO! Power 微型电源组6EP1 332-1SH436EP1 332-1SH52SITOP 附加设备6EP124VDC24VDC 输出24VDC5A10A24VDC 设定范围10A3 〜52DC 10A961-3BA10 6EP1共用961-3BA01961-3BA21961-2BA00 单相220VAC输入,输出24VDC单相220VAC输入,输出24VDC信号模块,缓冲模块,2.5A4A输入范围240VAC/6A, 只能和模块式40A,可并联,输入24VDC输出电流SITOP电源共用只能和模块式SITOP电源6EP16EP1SITOP PS207 冗余模块,诊断模块,输入输入24VDC输出电流24VDC输出电流40A4*10A6EP1 332-1LA00 单相100/220VAC 输入,输出24VDC 2.5A100/220VAC 输入,输出 24VDC 4A 220VAC 输入,输出24VDC 5A 工业可并联 120VAC/220VAC 俞入,输出 24VDC 5A 输出 输出 输出 输出 输出 输出 输出 输出120/230VAC 输入,输出 24VDC 0.5A 6ES7 654-8BC03-5DD0 AS 414-3 自动化系统,存储卡 2MB RAM 用于连接到工业以太网的CP443-1EX20 通讯模板 PS407 20A 电源 UR1( 18 槽 ALU )6ES7 654-8BC03-3BD0 AS 414-3 自动化系统,存储卡 2MB RAM 用于连接到工业以太网的 CP443-1EX20 通讯模板 PS407 10A 电源 UR2 ( 9 槽 ALU ) 6ES7 654-8CG03-5DD0 AS 416-2 自动化系统,存储卡4MB RAM 用于连接到工业以太网的CP443-1EX20 通讯模板 PS407 20A 电源 UR1( 18 槽 ALU ) 6ES7 654-8CG03-3BD0 AS 416-2 自动化系统,存储卡 CP443-1EX20 通讯模板 PS407 10A 电源 UR2 ( 9 槽) 6ES7 654-8DH03-5DD0 AS 416-3 自动化系统,存储卡 CP443-1EX20 通讯模板 PS407 20A 电源 UR1( 18 槽)6ES7 654-8DH03-3BD0 AS 416-3 自动化系统,存储卡CP443-1EX20 通讯模板 PS407 10A 电源 UR2 ( 9 槽) 6ES7 654-8CK03-5DD0 AS 417-4 自动化系统,存储卡 CP443-1EX20 通讯模板 PS407 20A 电源 UR1( 18 槽) 6ES7 654-8CK03-3BD0 AS 417-4 自动化系统,存储卡CP443-1EX20 通讯模板 PS407 10A 电源 UR2 ( 9 槽)6ES7 654-8EK03-5DD0 AS 417-4 自动化系统,存储卡CP443-1EX20 通讯模板 PS407 20A 电源 UR1( 18 槽) 6ES7 654-8EK03-3BD0 AS 417-4 自动化系统,存储卡 CP443-1EX20 通讯模板 PS407 10A 电源 UR2 ( 9 槽)6ES7 654-8BA03-3CD0 AS 412-3-1H 自动化系统 存储卡CP 443-1EX20 通讯模板, UR2 (9 槽),PS 407 10 A 电源6ES7 654-8BE03-3CD0 AS 414-4-1H 自动化系统,存储卡 2MB RAM,用于连到工业以太网的 CP 443-1EX20 通讯模板,UR2 (9 槽),PS 407 10 A 电源6ES7 654-8CM03-3CD0 AS 417-4-1H 自动化系统,4MB 存储卡 RAM ,用于连到工业以太网的 CP 443-1EX20 通讯模板,UR1(9 槽),PS407 10A 电源6ES7 654-8EM03-3CD0 AS 417-4-1H 自动化系统,16MB 存储卡 RAM,用于连到工业以太网的 CP 443-1EX20 通讯模板,UR1(9 槽),PS407 10A 电源6ES7 656-8BA33-1CD0 AS 412-3-2H 型控制器,2 个 2MB 存储卡 RAM 2 个 CP443通讯处理器 CP 443-1EX20,UR2-H (18槽铝制),4个冗余系统同步模板(新)近距离同步(10米以内)和2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A 电源(可冗余) 6ES7 656-8BA33-1BD0 AS 412-3-2H 型控制器,2 个 2MB 存储卡 RAM 2 个 CP443通讯处理器6EP1 332-1LA10单相 6EP1 333-2AA00 单相 6EP1 333-2BA00 单相 6EP1 334-2AA00 单相 6EP1 334-2BA00 单相 6EP1 336-2BA00 单相 6EP1 434-2BA00 三相6EP1 436-2BA00 三相6EP1 437-2BA00 三相6EP1 437-2BA10 三相 6EP1 252-0AA01 单相 6EP1 331-2BA10 单相24VDC , 10A ,工业可并联 24VDC 10A24VDC 20A24VDC 10A 工业可并联 24VDC , 20A ,工业可并联 24VDC , 30A ,工业可并联 24VDC , 40A ,工业可并联 41.5V/2A220VAC 输入, 220VAC 输入,220VAC 输入,380VAC 输入,380VAC 输4MB RAM 用于连接到工业以太网的 8MB RAM 用于连接到工业以太网的 8MB RAM 用于连接到工业以太网的 4MB RAM 用于连接到工业以太网的 4MB RAM 用于连接到工业以太网的 16MB RAM 用于连接到工业以太网的16MB RAM 用于连接到工业以太网的2 MB RAM, 用于连到工业以太网的CP 443-1EX20,UR2-H (18 槽铝制),4 个冗余系统同步模板(新)近距离同步( 10 米以内)和2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A 电源6ES7 656-8BA33-2BD0 AS 412-3-2H 型控制器,2个2MB 存储卡 RAM 2个CP443通讯处理器 CP 443-1EX20,UR2-H (18 槽钢制),4个冗余系统同步模板(新)近距离同步( 10米以内)和2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A 电源6ES7 656-8CE33-1CD0 AS 414-4-2H 自动化系统,2个4 MB 存储卡 RAM, 2个用于连到工业 以太网的CP 443-1EX20通讯模板,UR2-H (18槽),4个冗余系统同步模板(新)近距离同步(10米以内)和2个 冗余系统光纤连接电缆(1米)(新),2个PS407 10A 电源(可冗余) 6ES7 656-8CE33-2CD0 AS 414-4-2H 型控制器,2 个 4MB 存储卡 RAM 2 个 CP443通讯处理器, UR2-H (18槽钢制),4个冗余系统同步模板(新)近距离同步( 10米以内)和2个 冗余系统 光纤连接电缆(1米)(新),2个PS407 10A 电源 6ES7 656-8CM33-1BD0 AS 417-4-2H 自动化系统,2个4MB 存储卡 RAM, 2个用于连到工业以太网的CP 443-1EX20通讯模板,UR2-H (18槽铝制),4个冗余系统同步模板(新)近距离同 步(10米以内)和2个 冗余系统光纤连接电缆(1米)(新),2个PS407 10A 电源6ES7 656-8CM33-1CD0 AS 417-4-2H 自动化系统,2个4MB 存储卡 RAM, 2个用于连到工业以 太网的CP 443-1EX20通讯模板,UR2-H (18槽铝制),4个冗余系统同步模板(新)近距离同 步(10米以内)和2个 冗余系统光纤连接电缆 (1米)(新),2个PS407 10A 电源(可冗余)6ES7 656-8CM33-2BD0 AS 417-4-2H 自动化系统,2个4MB 存储卡 RAM, 2个用于连到工业以 太网的CP 443-1EX20通讯模板,UR2-H (18槽钢制),4个冗余系统同步模板(新)近距离同 步(10米以内)和2个 冗余系统光纤连接电缆(1米)(新),2个PS407 10A 电源6ES7 656-8CM33-2CD0 AS 417-4-2H 自动化系统,2个4MB 存储卡 RAM, 2个用于连到工业以 太网的CP 443-1EX20通讯模板,UR2-H (18槽钢制),4个冗余系统同步模板(新)近距离同 步(10米以内)和2个 冗余系统光纤连接电缆 (1米)(新),2个PS407 10A 电源(可冗余)6ES7 656-8DM33-1BD0 AS 417-4-2H 自动化系统,2个8MB 存储卡 RAM, 2个用于连到工业以 太网的CP 443-1EX20通讯模板,UR2-H (18槽铝制),4个冗余系统同步模板(新)近距离同 步(10米以内)和2个 冗余系统光纤连接电缆(1米)(新),2个PS407 10A 电源6ES7 656-8DM33-1CD0 AS 417-4-2H 自动化系统,2个8MB 存储卡 RAM, 2个用于连到工业以6ES7 656-8BE33-1BD0 AS 414-4-2H 型控制器,2 个 2MB 存储卡 UR2-H (18槽铝制),4个冗余系统同步模板(新)近距离同步( 光纤连接电缆(1米)(新),2个PS407 10A 电源6ES7 656-8BE33-1CD0 AS 414-4-2H 型控制器,2 个 2MB 存储卡 UR2-H (18槽铝制),4个冗余系统同步模板(新)近距离同步( 光纤连接电缆(1米)(新),2个PS407 10A 电源(可冗余)6ES7 656-8BE33-2BD0 AS 414-4-2H 型控制器,2 个 2MB 存储卡 UR2-H (18槽钢制),4个冗余系统同步模板(新)近距离同步( 光纤连接电缆(1米)(新),2个PS407 10A 电源6ES7 656-8BE33-2CD0 AS 414-4-2H 型控制器,2 个 2MB 存储卡 UR2-H (18槽钢制),4个冗余系统同步模板(新)近距离同步( 光纤连接电缆(1米)(新),2个PS407 10A 电源(可冗余)6ES7 656-8CE33-1BD0 AS 414-4-2H 型控制器,2 个 4MB 存储卡 UR2-H (18槽铝制),4个冗余系统同步模板(新)近距离同步( 光纤连接电缆(1米)(新),2个PS407 10A 电源RAM 2个CP443通讯处理器, 10米以内)和 2 个 冗余系统RAM2个CP443通讯处理器, 10米以内)和 2 个 冗余系统RAM 2个CP443通讯处理器, 10米以内)和 2 个 冗余系统RAM 2个CP443通讯处理器,10米以内)和 2 个 冗余系统 RAM 2个CP443通讯处理器, 10米以内)和 2 个 冗余系统太网的CP 443-1EX20通讯模板,UR2-H(18槽铝制),4个冗余系统同步模板(新)近距离同步(10米以内)和2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源(可冗余)6ES7 656-8DM33-2BD0 AS 417-4-2H 自动化系统,2个8MB 存储卡 RAM, 2个用于连到工业以 太网的CP 443-1EX20通讯模板,UR2-H (18槽钢制),4个冗余系统同步模板(新)近距离同 步(10米以内)和2个 冗余系统光纤连接电缆(1米)(新),2个PS407 10A 电源6ES7 656-8DM33-2CB0 AS 417-4-2H 自动化系统,2个8MB 存储卡 RAM, 2个用于连到工业以 太网的CP 443-1EX20通讯模板,UR2-H (18槽钢制),4个冗余系统同步模板(新)近距离同 步(10米以内)和2个 冗余系统光纤连接电缆 (1米)(新),2个PS407 10A 电源(可冗余) 6ES7 656-8EM33-1BD0 AS 417-4-2H 自动化系统,2个16MB 存储卡 RAM, 2个用于连到工业 以太网的CP 443-1EX20通讯模板,UR2-H (18槽铝制),4个冗余系统同步模板(新)近距离 同步(10米以内)和2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A 电源 6ES7 656-8EM33-1CD0 AS 417-4-2H 自动化系统,2个16 MB 存储卡 RAM, 2个用于连到工业以太网的CP 443-1EX20通讯模板,UR2-H (18槽),4个冗余系统同步模板(新)近距离同步 (10米以内)和2个 冗余系统光纤连接电缆(1米)(新),2个PS407 10A 电源6ES7 656-8DM33-2BD0 AS 417-4-2H 自动化系统,2个16MB 存储卡 RAM, 2个用于连到工业 以太网的CP 443-1EX20通讯模板,UR2-H (18槽钢制),4个冗余系统同步模板(新)近距离 同步(10米以内)和2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A 电源6ES7 656-8DM33-1GD0 AS 417-4-2H 自动化系统, 2个8MB 存储卡 RAM, 2个用于连到工业 以太网的CP 443-1EX20通讯模板,UR2-H (18槽),4个冗余系统同步模板(新)近距离同步 (10米以内)和2个 冗余系统光纤连接电缆(1米)(新),2个PS405 10A 电源6ES7 656-8EM33-1GD0 AS 417-4-2H 自动化系统,2个16 MB 存储卡 RAM, 2个用于连到工业 以太网的CP 443-1EX20通讯模板,UR2-H (18槽),4个冗余系统同步模板(新)近距离同步 (10米以内)和2个 冗余系统光纤连接电缆(1米)(新),2个PS405 10A 电源 SIMATIC PCS7 Software v7.16ES7 658-1AF17-0YA5 PCS 7 工程师站软件,用于 AS 的工程软件 不受限制 PO (过程对象 ) 6ES7 658-2CX17-0YA5 OS 客户端软件6ES7 652-0XD17-2YB5 SFC 显示和操作序列控件 V7.0 6ES7 658-1AF07-0YA5 PCS 7 工程师站软件,用于 AS 的工程软件 不受限制 PO (过程对象 )6ES7 658-2BA07-0YA0 PCS 7 服务器软件,用于 OS 的工程软件 250 PO / RC8K 6ES7 658-2BB07-0YA0 PCS 7 服务器软件,用于 OS 的工程软件 1000 PO / RC32K6ES7 658-2BA17-0YA0 PCS 7 服务器软件, 6ES7 658-2BB17-0YA0 PCS 7 服务器软件, 6ES7 658-2BC17-0YA0 PCS 7 服务器软件, 6ES7 658-2BD17-0YA0 PCS 7 服务器软件, 6ES7 658-2BE17-0YA0 PCS 7 服务器软件, 6ES7 658-2BF17-0YA0 PCS 7 服务器软件, 用于 OS 的工程软件 250 PO / RC8K 用于 OS 的工程软件 1000 PO / RC32K 用于 OS 的工程软件 2000 PO / RC64K 用于 OS 的工程软件 3000 PO / RC100K 用于 OS 的工程软件 5000 PO / RC150K用于 OS 的工程软件 8500 PO / RC256K6ES7 658-5AA17-0YA5 PCS 7 6ES7 658-5AB17-0YA5 PCS 7 6ES7 658-5AC17-0YA5 PCS 7 工程师站软件,用于 AS/OS 工程师站软件,用于 AS/OS 工程师站软件,用于 AS/OS的工程软件 250 PO / RC8K 的工程软件 1000 PO / RC32K 的工程软件 2000 PO / RC64K6ES7 658-1AF17-0YA6 PCS 7 工程师站软件租用授权 6ES7 658-2DF17-0YA6 PCS 7 工程师站软件租用授权 (30 天),用于 AS , 无限点 30 天),用于 OS , 无限点6ES7 658-2AA17-0YA0 OS 单站软件 6ES7 658-2AB17-0YA0 OS 单站软件 6ES7 658-2AC17-0YA0 OS 单站软件 6ES7 658-2AD17-0YA0 OS 单站软件6ES7 658-2AE17-0YA0 OS 单站软件 250 个 PO / RT 8K , 1000 个 PO / RT 32K , 2000 个 PO / RT 64K , 3000 个 PO / RT 100K, 5000 个 PO / RT 150K。
凸轮及同步控制指导说明

目录凸轮及同步控制指导说明 (3)1 凸轮简介 (3)1.1 凸轮基本原理 (3)1.2 了解机械参数 (4)2 三种基本模式 (6)2.1 旋切/飞剪 (6)2.1.1 试运行 (9)2.1.2 显示 (14)2.1.3 配置功能 (15)2.2 追剪 (31)2.2.1 试运行 (32)2.2.2 显示 (37)2.2.3 配置功能 (38)2.3 通用凸轮 (50)2.3.1 界面介绍 (50)2.3.2 试运行 (53)2.3.3 配置功能 (55)3 故障处理 (58)4 常见问题 (59)5 功能码 (60)龙门同步控制说明 (69)1 基本原理 (69)2 系统配线图 (69)3 参数的设定 (71)4 对位回零方式 (73)5 后台监控通道 (75)6 步骤 (75)凸轮及同步控制指导说明1凸轮简介本说明书介绍了如何正确使用汇川电子凸轮专用伺服驱动器。
在使用(安装、运行、维护、检查等)前,请务必认真阅读本说明书。
另外,请在理解产品的特性后再使用该产品。
本产品的主要特点有:(1)伺服驱动器与运动控制器结合为一体化控制器。
(2)使用高精度电子凸轮生成运动轨迹,速度、加速度曲线都平滑变化,使电机的速度指令、转矩指令没有阶跃变化,可以大幅度减小机械缓冲。
(3)支持自由曲线规划、同步旋切、自动追剪、等电子凸轮功能。
(4)可跟踪标点位置(色标、孔位及凸点等)实时调节进行剪切。
可用于印刷纸、包装袋等需要补偿印刷/位置偏差的剪切。
(5)支持相位调整功能。
可用于医用卫生纸等没有色标但需要补偿位置偏差的剪切。
(6)支持Modbus、与PLC,HMI等通讯,实时修改凸轮数据、方便灵活使用。
(7)剪切长度范围可达到65535.000mm,设定可精确至um单位。
(8)可包含人性化的订单自动切换功能。
(9)自由曲线规划功能,大容量EEPROM可使设置的点数多达272个。
(10)人性化的图形规划界面、自由上传、下载的功能使用户在使用时更加形象、具体、方便。
西门子PLC各种模块分类选型及用途

CPU6ES7 211-0AA23-0XB0 CPU221 DC/DC/DC,6输入/4输出6ES7 211-0BA23-0XB0 CPU221 继电器输出,6输入/4输出6ES7 212-1AB23-0XB8 CPU222 DC/DC/DC,8输入/6输出6ES7 212-1BB23-0XB8 CPU222 继电器输出,8输入/6输出6ES7 214-1AD23-0XB8 CPU224 DC/DC/DC,14输入/10输出6ES7 214-1BD23-0XB8 CPU224 继电器输出,14输入/10输出6ES7 214-2AD23-0XB8 CPU224XP DC/DC/DC,14DI/10DO,2AI/1AO(PNP) 6ES7 214-2AS23-0XB8 CPU224XPsi DC/DC/DC,14DI/10DO,2AI/1AO(NPN) 6ES7 214-2BD23-0XB8 CPU224XP 继电器输出,14DI/10DO,2AI/1AO6ES7 216-2AD23-0XB8 CPU226 DC/DC/DC,24输入/16输出6ES7 216-2BD23-0XB8 CPU226 继电器输出,24输入/16输出扩展模块6ES7 221-1BH22-0XA8 EM221 16入 24VDC,开关量6ES7 221-1BF22-0XA8 EM221 8入 24VDC,开关量6ES7 221-1EF22-0XA0 EM221 8入 120/230VAC,开关量6ES7 222-1BF22-0XA8 EM222 8出 24VDC,开关量6ES7 222-1EF22-0XA0 EM222 8出 120V/230VAC,0.5A 开关量6ES7 222-1HF22-0XA8 EM222 8出继电器6ES7 222-1BD22-0XA0 EM222 4出 24VDC 固态-MOSFET6ES7 222-1HD22-0XA0 EM222 4出继电器干触点6ES7 223-1BF22-0XA8 EM223 4入/4出 24VDC,开关量6ES7 223-1HF22-0XA8 EM223 4入 24VDC/4出继电器6ES7 223-1BH22-0XA8 EM223 8入/8出 24VDC,开关量6ES7 223-1PH22-0XA8 EM223 8入 24VDC/8出继电器6ES7 223-1BL22-0XA8 EM223 16入/16出 24VDC,开关量6ES7 223-1PL22-0XA8 EM223 16入 24VDC/16出继电器6ES7 223-1BM22-0XA8 EM223 32入/32出 24VDC,开关量6ES7 223-1PM22-0XA8 EM223 32入 24VDC/32出继电器6ES7 231-0HC22-0XA8 EM231 4入*12位精度,模拟量6ES7 231-0HF22-0XA0 EM231 8入*12位精度,模拟量6ES7 231-7PB22-0XA8 EM231 2入*热电阻,模拟量6ES7 231-7PC22-0XA0 EM231 4入*热电阻,模拟量6ES7 231-7PD22-0XA8 EM231 4入*热电偶,模拟量6ES7 231-7PF22-0XA0 EM231 8入*热电偶,模拟量6ES7 232-0HB22-0XA8 EM232 2出*12位精度,模拟量6ES7 232-0HD22-0XA0 EM232 4出*12位精度,模拟量6ES7 235-0KD22-0XA8 EM235 4入/1出*12位精度,模拟量6ES7 277-0AA22-0XA0 EM277 PROFIBUS-DP接口模块6ES7 253-1AA22-0XA0 EM253 位控模块6GK7 243-1EX01-0XE0 CP243-1 工业以太网模块附件6ES7 291-8GF23-0XA0 MC291,新CPU22x存储器盒,64K6ES7 297-1AA23-0XA0 CC292,CPU22x时钟/日期电池盒6ES7 291-8BA20-0XA0 BC293,CPU22x电池盒6ES7 290-6AA20-0XA0 扩展电缆,I/O扩展,0.8米,CPU22x/EM6ES7 901-3CB30-0XA0 编程/通讯电缆,PC/PPI,带光电隔离,5-开关,5m6ES7 901-3DB30-0XA0 编程/通讯电缆,PC/PPI,带光电隔离,USB接口,5-开关6ES7 292-1AD20-0AA0 CPU22x/EM端子连接器块,7个端子,可拆卸6ES7 292-1AE20-0AA0 CPU22x/EM端子连接器块,12个端子,可拆卸6ES7 292-1AG20-0AA0 CPU22x/EM连接器块,18个端子,可拆卸6AV6 640-0AA00-0AX0 TD400C文本显示器6EP1 332-1SH31 专为S7-200 设计电源,24V/3.5A 可并联5个6ES7 810-2CC03-0YX0 STEP 7-Micro/Win32 V4.0 包含SP6升级包电源模板6ES7 307-1BA01-0AA0 电源模块(2A)6ES7 307-1EA01-0AA0 电源模块(5A)6ES7 307-1KA02-0AA0 电源模块(10A)CPU6ES7 312-1AE14-0AB0 CPU312,32K内存6ES7 312-5BF04-0AB0 CPU312C,64K内存 10DI/6DO6ES7 313-5BG04-0AB0 CPU313C,128K内存 24DI/16DO / 4AI/2AO6ES7 313-5BG04-9AM0 CPU313C,128K内存24DI/16DO / 4AI/2AO(组合件)(6ES7 313-5BF03-0AB0+2*6ES7 392-1AM00-0AA0)6ES7 313-6BG04-0AB0 CPU313C-2PTP,128K内存 16DI/16DO6ES7 313-6CG04-0AB0 CPU313C-2DP,128K内存 16DI/16DO6ES7 313-6CG04-9AM0 CPU313C-2DP,128K内存 16DI/16DO(6ES7 313-6CF03-0AB0+6ES7 392-1AM00-0AA0)6ES7 314-1AG14-0AB0 CPU314,128K内存6ES7 314-6BH04-0AB0 CPU314C-2PTP 192K内存 24DI/16DO / 4AI/2AO6ES7 314-6CH04-0AB0 CPU314C-2DP 192K内存 24DI/16DO / 4AI/2AO6ES7 314-6CH04-9AM0 CPU314C-2DP 192K内存24DI/16DO / 4AI/2AO(6ES7 314-6CG03-0AB0+2*6ES7 392-1AM00-0AA0)6ES7 315-2AH14-0AB0 CPU315-2DP, 256K内存6ES7 315-2EH14-0AB0 CPU315-2 PN/DP, 384K内存6ES7 317-2AK14-0AB0 CPU317-2DP,1M内存6ES7 317-2EK14-0AB0 CPU317-2 PN/DP,1MB内存6ES7 318-3EL01-0AB0 CPU319-3 PN/DP,2M内存内存卡6ES7 953-8LF20-0AA0 SIMATIC Micro内存卡 64kByte(MMC)6ES7 953-8LG20-0AA0 SIMATIC Micro内存卡128KByte(MMC)6ES7 953-8LJ30-0AA0 SIMATIC Micro内存卡512KByte(MMC)6ES7 953-8LL20-0AA0 SIMATIC Micro内存卡2MByte(MMC)6ES7 953-8LM20-0AA0 SIMATIC Micro内存卡4MByte(MMC)6ES7 953-8LP20-0AA0 SIMATIC Micro内存卡8MByte(MMC)开关量模板6ES7 321-1BH02-0AA0 开入模块(16点,24VDC)6ES7 321-1BH02-9AJ0 开入模块(16点,24VDC)组合件(6ES7 321-1BH02-0AA0+6ES7 392-1AJ00-0AA0)6ES7 321-1BH10-0AA0 开入模块(16点,24VDC)6ES7 321-1BH50-0AA0 开入模块(16点,24VDC,源输入)6ES7 321-1BH50-9AJ0 开入模块(16点,24VDC,源输入)组合件 (6ES7 321-1BH50-0AA0+6ES7 392-1AJ00-0AA0)6ES7 321-1BL00-0AA0 开入模块(32点,24VDC)6ES7 321-1BL00-9AM0 开入模块(32点,24VDC)组合件(6ES7 321-1BL00-0AA0+6ES7 392-1AM00-0AA0)6ES7 321-7BH01-0AB0 开入模块(16点,24VDC,诊断能力)6ES7 321-1EL00-0AA0 开入模块(32点,120VAC)6ES7 321-1FF01-0AA0 开入模块(8点,120/230VAC)6ES7 321-1FF10-0AA0 开入模块(8点,120/230VAC)与公共电位单独连接6ES7 321-1FH00-0AA0 开入模块(16点,120/230VAC)6ES7 321-1FH00-9AJ0 开入模块(16点,120/230VAC)(6ES7 321-1FH00-0AA0+6ES7 392-1AJ00-0AA0)6ES7 321-1CH00-0AA0 开入模块(16点,24/48VDC)6ES7 321-1CH20-0AA0 开入模块(16点,48/125VDC)6ES7 321-1BP00-0AA0 开入模块(64点,24VDC)6ES7 322-1BH01-0AA0 开出模块(16点,24VDC)6ES7 322-1BH01-9AJ0 开出模块(16点,24VDC)(6ES7 322-1BH01-0AA0+6ES7 392-1AJ00-0AA0)6ES7 322-1BH10-0AA0 开出模块(16点,24VDC)高速6ES7 322-1CF00-0AA0 开出模块(8点,48-125VDC)6ES7 322-8BF00-0AB0 开出模块(8点,24VDC)诊断能力6ES7 322-5GH00-0AB0 开出模块(16点,24VDC,独立接点,故障保护)6ES7 322-1BL00-0AA0 开出模块(32点,24VDC)6ES7 322-1BL00-9AM0 开出模块(32点,24VDC)(6ES7 322-1BL00-0AA0+6ES7 392-1AM00-0AA0)6ES7 322-1FL00-0AA0 开出模块(32点,120VAC/230VAC)6ES7 322-1BF01-0AA0 开出模块(8点,24VDC,2A)6ES7 322-1FF01-0AA0 开出模块(8点,120V/230VAC)6ES7 322-5FF00-0AB0 开出模块(8点,120V/230VAC,独立接点)6ES7 322-1HF01-0AA0 开出模块(8点,继电器,2A)6ES7 322-1HF01-9AJ0 开出模块(8点,继电器,2A)(6ES7 322-1HF01-0AA0+6ES7 392-1AJ00-0AA0)6ES7 322-1HF10-0AA0 开出模块(8点,继电器,5A,独立接点)6ES7 322-1HH01-0AA0 开出模块(16点,继电器)6ES7 322-1HH01-9AJ0 开出模块(16点,继电器)(6ES7 322-1HH01-0AA0+6ES7 392-1AJ00-0AA0)6ES7 322-5HF00-0AB0 开出模块(8点,继电器,5A,故障保护)6ES7 322-1FH00-0AA0 开出模块(16点,120V/230VAC)6ES7 322-1BP00-0AA0 开出模块(64点,24VDC)6ES7 323-1BH01-0AA0 8点输入,24VDC;8点输出,24VDC模块6ES7 323-1BL00-0AA0 16点输入,24VDC;16点输出,24VDC模块6ES7 323-1BL00-9AM0 16点输入,24VDC;16点输出,24VDC模块(6ES7 323-1BL00-0AA0+6ES7 392-1AM00-0AA0)模拟量模板6ES7 331-7KF02-0AB0 模拟量输入模块(8路,多种信号)6ES7 331-7KF02-9AJ0 模拟量输入模块(8路,多种信号) (6ES7 331-7KF02-0AB0+6ES7 392-1AJ00-0AA0)6ES7 331-7KB02-0AB0 模拟量输入模块(2路,多种信号)6ES7 331-7KB02-9AJ0 模拟量输入模块(2路,多种信号)(6ES7 331-7KB02-0AB0+6ES7 392-1AJ00-0AA0)6ES7 331-7NF00-0AB0 模拟量输入模块(8路,15位精度)6ES7 331-7NF00-9AM0 模拟量输入模块(8路,15位精度)(6ES7 331-7NF00-0AB0+6ES7 392-1AM00-0AA0)6ES7 331-7NF10-0AB0 模拟量输入模块(8路,15位精度)4通道模式6ES7 331-7HF01-0AB0 模拟量输入模块(8路,14位精度,快速)6ES7 331-1KF02-0AB0 模拟量输入模块(8路, 13位精度)6ES7 331-1KF02-9AM0 模拟量输入模块(8路, 13位精度)(6ES7 331-1KF02-0AB0+6ES7 392-1AM00-0AA0)6ES7 331-7PF01-0AB0 8路模拟量输入,16位,热电阻6ES7 331-7PF01-9AM0 8路模拟量输入,16位,热电阻(6ES7 331-7PF01-0AB0+6ES7 392-1AM00-0AA0)6ES7 331-7PF11-0AB0 8路模拟量输入,16位,热电偶6ES7 331-7PF11-9AM0 8路模拟量输入,16位,热电偶(6ES7 331-7PF11-0AB0+6ES7 392-1AM00-0AA0)6ES7 332-5HD01-0AB0 模拟输出模块(4路)6ES7 332-5HD01-9AJ0 模拟输出模块(4路)(6ES7 332-5HD01-0AB0+6ES7 392-1AJ00-0AA0) 6ES7 332-5HB01-0AB0 模拟输出模块(2路)6ES7 332-5HB01-9AJ0 模拟输出模块(2路)(6ES7 332-5HB01-0AB0+6ES7 392-1AJ00-0AA0) 6ES7 332-5HF00-0AB0 模拟输出模块(8路)6ES7 332-5HF00-9AM0 模拟输出模块(8路)(6ES7 332-5HF00-0AB0+6ES7 392-1AM00-0AA0) 6ES7 332-7ND02-0AB0 模拟量输出模块(4路,15位精度)6ES7 334-0KE00-0AB0 模拟量输入(4路RTD)/模拟量输出(2路)6ES7 334-0CE01-0AA0 模拟量输入(4路)/模拟量输出(2路)附件6ES7 365-0BA01-0AA0 IM365接口模块6ES7 360-3AA01-0AA0 IM360接口模块6ES7 361-3CA01-0AA0 IM361接口模块6ES7 368-3BB01-0AA0 连接电缆 (1米)6ES7 368-3BC51-0AA0 连接电缆 (2.5米)6ES7 368-3BF01-0AA0 连接电缆 (5米)6ES7 368-3CB01-0AA0 连接电缆 (10米)6ES7 390-1AB60-0AA0 导轨(160mm)6ES7 390-1AE80-0AA0 导轨(480mm)6ES7 390-1AF30-0AA0 导轨(530mm)6ES7 390-1AJ30-0AA0 导轨(830mm)6ES7 390-1BC00-0AA0 导轨(2000mm)6ES7 392-1AJ00-0AA0 20针前连接器6ES7 392-1AM00-0AA0 40针前连接器6ES7 392-4BB00-0AA0 S7-300 连接电缆,用于64通道模块,长:1M,一包2个6ES7 392-4BC50-0AA0 S7-300 连接电缆,用于64通道模块,长:2.5M,一包2个6ES7 392-4BF00-0AA0 S7-300 连接电缆,用于64通道模块,长:5M,一包2个6ES7 392-1AN00-0AA0 S7-300,端子排,带螺钉型端子,用于S7-300 64通道模块,一包2个6ES7 392-1BN00-0AA0 S7-300,端子排,带弹簧型端子,用于S7-300 64通道模块,一包2个6ES7 390-0AA00-0AA0 SIMATIC S7-300,总线连接器功能模板6ES7 350-1AH03-0AE0 FM350-1 计数器功能模块6ES7 350-2AH01-0AE0 FM350-2 计数器功能模块6ES7 351-1AH02-0AE0 FM351 定位功能模块6ES7 352-1AH02-0AE0 FM352 电子凸轮控制器+组态包光盘6ES7 355-0VH10-0AE0 FM355C 闭环控制模块6ES7 355-1VH10-0AE0 FM355S 闭环控制系统6ES7 355-2CH00-0AE0 FM355-2C 闭环控制模块6ES7 355-2SH00-0AE0 FM355-2S 闭环控制模块6ES7 338-4BC01-0AB0 SM338绝对位置输入模块6ES7 352-5AH01-0AE0 FM352-5高速布尔处理器6ES7 352-5AH11-0AE0 FM352-5高速布尔处理器通讯模板6ES7 340-1AH02-0AE0 CP340 通讯处理器(RS232)6ES7 340-1BH02-0AE0 CP340 通讯处理器(20mA/TTY)6ES7 340-1CH02-0AE0 CP340 通讯处理器(RS485/RS422)6ES7 341-1AH02-0AE0 CP341 通讯处理器(RS232)6ES7 341-1BH02-0AE0 CP341 通讯处理器(20mA/TTY)6ES7 341-1CH02-0AE0 CP341 通讯处理器(RS485/RS422)6ES7 870-1AA01-0YA0 可装载驱动 MODBUS RTU 主站6ES7 870-1AB01-0YA0 可装载驱动 MODBUS RTU 从站6ES7 902-1AB00-0AA0 RS232电缆 5m6ES7 902-1AC00-0AA0 RS232电缆 10m6ES7 902-1AD00-0AA0 RS232电缆 15m6ES7 902-2AB00-0AA0 20mA/TTY电缆 5m6ES7 902-2AC00-0AA0 20mA/TTY电缆 10m6ES7 902-2AG00-0AA0 20mA/TTY电缆 50m6ES7 902-3AB00-0AA0 RS485/RS422电缆 5m6ES7 902-3AC00-0AA0 RS485/RS422电缆 10m6ES7 902-3AG00-0AA0 RS485/RS422电缆 50m6GK7 342-5DA02-0XE0 CP342-5通讯模块6GK7 342-5DF00-0XE0 CP342-5 光纤通讯模块6GK7 343-5FA01-0XE0 CP343-5通讯模块6GK7 343-1EX30-0XE0 CP343-1 以太网通讯模块6GK7 343-1CX10-0XE0 CP343-1 以太网通讯模块6GK7 343-1GX30-0XE0 CP343-1 IT以太网通讯模块(支持PROFINET)6ES7 312-1AE13-0AB0 CPU312,32K内存6ES7 315-2AG10-0AB0 CPU315-2DP, 128K内存6ES7 315-2EH13-0AB0 CPU315-2 PN/DP, 256K内存6ES7 317-2EK13-0AB0 CPU317-2 PN/DP,1MB内存6ES7 318-3EL00-0AB0 CPU319-3 PN/DP,1.4M内存6ES7 353-1AH01-0AE0 FM353 定位功能模块6ES7 354-1AH01-0AE0 FM354 定位功能模块6ES7 357-4AH01-0AE0 FM357-2 定位功能模块6ES7 312-5BE03-0AB0 CPU312C,32K内存 10DI/6DO6ES7 313-5BF03-0AB0 CPU313C,64K内存 24DI/16DO / 4AI/2AO6ES7 313-5BF03-9AM0 CPU313C,64K内存24DI/16DO / 4AI/2AO(组合件)(6ES7 313-5BF03-0AB0+2*6ES7 392-1AM00-0AA0)6ES7 313-6BF03-0AB0 CPU313C-2PTP,64K内存 16DI/16DO6ES7 313-6CF03-0AB0 CPU313C-2DP,64K内存 16DI/16DO6ES7 313-6CF03-9AM0 CPU313C-2DP,64K内存16DI/16DO(6ES7 313-6CF03-0AB0+6ES7 392-1AM00-0AA0)6ES7 314-6BG03-0AB0 CPU314C-2PTP 96K内存 24DI/16DO / 4AI/2AO6ES7 314-6CG03-0AB0 CPU314C-2DP 96K内存 24DI/16DO / 4AI/2AO6ES7 314-6CG03-9AM0 CPU314C-2DP 96K内存24DI/16DO / 4AI/2AO(6ES7 314-6CG03-0AB0+2*6ES7 392-1AM00-0AA0)6ES7 315-2AG10-0AB0 CPU315-2DP, 128K内存6ES7 317-2AJ10-0AB0 CPU317-2DP,512K内存电源模块6ES7 407-0DA02-0AA0 电源模块(4A)6ES7 407-0KA02-0AA0 电源模块(10A)6ES7 407-0KR02-0AA0 电源模块(10A)冗余6ES7 407-0RA02-0AA0 电源模块(20A)6ES7 405-0DA02-0AA0 电源模块(4A)6ES7 405-0KA02-0AA0 电源模块(10A)6ES7 405-0RA02-0AA0 电源模块(20A)6ES7 971-0BA00 备用电池CPU6ES7 412-3HJ14-0AB0 CPU 412-3H; 512KB程序内存/256KB数据内存6ES7 414-4HM14-0AB0 CPU 414-4H; 冗余热备CPU 2.8 MB RAM6ES7 417-4HT14-0AB0 CPU 417-4H; 冗余热备CPU 30 MB RAM6ES7 400-0HR00-4AB0 CPU 417-4H; 冗余热备CPU 30 MB RAM6ES7 400-0HR50-4AB0 412H 系统套件包括 2 个CPU、1个H型中央机架、2个电源、2个1M 存储卡、4个同步模块、2根同步电缆,以及4个备用电池(PS405 10A)6ES7 412-1XJ05-0AB0 CPU412-1,144KB程序内存/144KB数据内存6ES7 412-2XJ05-0AB0 CPU412-2,256KB程序内存/256KB数据内存6ES7 412-2EK06-0AB0 CPU412-2PN/DP,0.5M程序内存/0.5M数据内存6ES7 414-2XK05-0AB0 CPU414-2,512KB程序内存/512KB数据内存6ES7 414-3XM05-0AB0 CPU414-3,1.4M程序内存/1.4M数据内存 1个IF模板插槽6ES7 414-3EM06-0AB0 CPU414-3PN/DP 2M程序内存/2M数据内存 1个IF模板插槽6ES7 416-2XN05-0AB0 CPU416-2,2.8M程序内存/2.8M数据内存6ES7 416-3XR05-0AB0 CPU416-3,5.6M程序内存/5.6M数据内存 1个IF模板插槽6ES7 416-3ES06-0AB0 CPU416-3PN/DP 8M程序内存/8M数据内存 1个IF模板插槽6ES7 416-2FN05-0AB0 CPU416F-2,2.8M程序内存/2.8M数据内存6ES7 416-3FR05-0AB0 CPU416F-3PN/DP,5.6M程序内存/5.6M数据内存6ES7 417-4XT05-0AB0 CPU417-4,15M程序内存/15M数据内存内存卡6ES7 952-0AF00-0AA0 64K字节 RAM6ES7 952-1AH00-0AA0 256K字节 RAM6ES7 952-1AK00-0AA0 1M字节 RAM6ES7 952-1AL00-0AA0 2M字节 RAM6ES7 952-1AM00-0AA0 4M字节 RAM6ES7 952-1AP00-0AA0 8M字节 RAM6ES7 952-1AS00-0AA0 16M字节 RAM6ES7 952-1AY00-0AA0 64M字节 RAM6ES7 952-0KF00-0AA0 64K字节 FLASH EPROM6ES7 952-0KH00-0AA0 256K字节 FLASH EPROM6ES7 952-1KK00-0AA0 1M字节 FLASH EPROM6ES7 952-1KL00-0AA0 2M字节 FLASH EPROM6ES7 952-1KM00-0AA0 4M字节 FLASH EPROM6ES7 952-1KP00-0AA0 8M字节 FLASH EPROM6ES7 952-1KS00-0AA0 16M字节 FLASH EPROM6ES7 952-1KT00-0AA0 32M字节 FLASH EPROM6ES7 952-1KY00-0AA0 64M字节 FLASH EPROM开关量输入模板6ES7 421-1BL01-0AA0 开关量输入模块(32点,24VDC)6ES7 421-1EL00-0AA0 开关量输入模块(32点,120VUC)6ES7 421-1FH20-0AA0 开关量输入模块(16点,120/230VUC)6ES7 421-7BH01-0AB0 开关量输入模块(16点,24VDC)中断6ES7 421-7DH00-0AB0 开关量输入模块(16点,24V到60VUC)开关量输出模板6ES7 422-1BH11-0AA0 开关量输出模块(16点,24VDC,2A)6ES7 422-1BL00-0AA0 32点输出,24VDC,0.5A6ES7 422-7BL00-0AB0 32点输出,24VDC,0.5A,中断6ES7 422-1FH00-0AA0 16点输出,120/230VAC,2A6ES7 422-1HH00-0AA0 16点输出,继电器,5A模拟量模块6ES7 431-0HH00-0AB0 16路模拟输入,13位6ES7 431-1KF00-0AB0 8路模拟输入,13位,隔离6ES7 431-1KF10-0AB0 8路模拟输入,14位,隔离,线性化6ES7 431-1KF20-0AB0 8路模拟输入,14位,隔离6ES7 431-7KF00-0AB0 8路模拟输入,16位,隔离,热电偶6ES7 431-7KF10-0AB0 8路模拟输入,16位,隔离,热电阻6ES7 431-7QH00-0AB0 16路模拟输入,16位,隔离6ES7 432-1HF00-0AB0 8路模拟输出,13位,隔离功能模板6ES7 450-1AP00-0AE0 FM450-1计数器模板6ES7 451-3AL00-0AE0 FM451定位模板6ES7 452-1AH00-0AE0 FM452电子凸轮控制器6ES7 453-3AH00-0AE0 FM453定位模板6ES7 455-0VS00-0AE0 FM455C闭环控制模块6ES7 455-1VS00-0AE0 FM455S闭环控制模块6DD1 607-0AA2 FM 458-1DP快速处理系统6ES7 953-8LJ20-0AA0 用于FM458-1DP 基本模板 512KByte(MMC) 6ES7 953-8LL20-0AA0 用于FM458-1DP 基本模板 2MByte(MMC)6ES7 953-8LM20-0AA0 用于FM458-1DP 基本模板 4MByte(MMC)6DD1 607-0CA1 EXM 438-1 I/O扩展模板6DD1 607-0EA0 EXM 448 通讯扩展模板6DD1 607-0EA2 EXM 448-2 通讯扩展模板6DD1 681-0AE2 SB10端子模块6DD1 681-0AF4 SB60端子模块6DD1 681-0AG2 SB70端子模块6DD1 681-0AJ1 SU12端子模块6DD1 681-0DH1 SB71端子模块6DD1 681-0EB3 SB61端子模块6DD1 681-0GK0 SU13端子模块6DD1 684-0GC0 SC62连接电缆6DD1 684-0GD0 SC63连接电缆6DD1 684-0GE0 SC64连接电缆通讯模板6ES7 440-1CS00-0YE0 CP440通讯处理器6ES7 441-1AA04-0AE0 CP441-1通讯处理器6ES7 441-2AA04-0AE0 CP441-2通讯处理器6ES7 963-1AA00-0AA0 RS232C接口模板6ES7 963-2AA00-0AA0 20mA接口模板6ES7 963-3AA00-0AA0 RS422/485接口模板6ES7 870-1AA01-0YA0 可装载驱动 MODBUS RTU 主站6ES7 870-1AB01-0YA0 可装载驱动 MODBUS RTU 从站6GK7 443-5FX02-0XE0 CP443-5基本型通讯处理器,支持Profibus-Fms协议6GK7 443-5DX04-0XE0 CP443-5扩展型通讯处理器,支持Profibus-DP协议6GK7 443-1EX20-0XE0 CP443-1 以太网通讯处理器6GK7 443-1GX20-0XE0 CP443-1 高级以太网通讯处理器附件6ES7 960-1AA04-0XA0 冗余系统同步模板(新)近距离同步(10米以内)6ES7 960-1AB04-0XA0 冗余系统同步模板(新)远程同步模板(10米到10公里,用同长度的光缆)6ES7 960-1AA04-5AA0 冗余系统光纤连接电缆(1米)(新)6ES7 960-1AA04-5BA0 冗余系统光纤连接电缆(2米)(新)6ES7 960-1AA04-5KA0 冗余系统光纤连接电缆(10米)(新)6ES7 833-1CC01-0YA5 S7F系统可选软件包6ES7 833-1CC00-6YX0 F运行授权6ES7 197-1LA04-0XA0 Y-LINK6ES7 492-1AL00-0AA0 前连接器6ES7 400-1TA01-0AA0 主板(18槽)UR16ES7 400-1JA01-0AA0 主板(9槽)UR26ES7 400-1TA11-0AA0 主板(18槽)铝板6ES7 400-1JA11-0AA0 主板(9槽)铝板6ES7 400-2JA00-0AA0 UR2-H主板(18槽)6ES7 400-2JA10-0AA0 UR2-H主板(18槽)铝板6ES7 401-1DA01-0AA0 CR3 机架(4 槽)6ES7 401-2TA01-0AA0 CR2主板(18槽)6ES7 403-1TA01-0AA0 ER1机架(18槽)6ES7 403-1JA01-0AA0 ER2机架(9槽)6ES7 403-1TA11-0AA0 ER1机架(18槽)铝板6ES7 403-1JA11-0AA0 ER2机架(9槽)铝板6ES7 460-0AA01-0AB0 IM460-06ES7 461-0AA01-0AA0 IM461-06ES7 461-0AA00-7AA0 终端器6ES7 468-1AH50-0AA0 连接电缆 (0.75米)6ES7 468-1BB50-0AA0 连接电缆 (1.5米)6ES7 460-1BA01-0AB0 IM460-16ES7 461-1BA01-0AA0 IM461-16ES7 468-3AH50-0AA0 468-3连接电缆 (0.75米)6ES7 468-3BB50-0AA0 468-3连接电缆 (1.5米)6ES7 460-3AA01-0AB0 IM460-36ES7 461-3AA01-0AA0 IM461-36ES7 461-3AA00-7AA0 终端器6ES7 468-1BF00-0AA0 468-1连接电缆(5米)6ES7 468-1CB00-0AA0 468-1连接电缆(10米)6ES7 468-1CC50-0AA0 468-1连接电缆(25米)6ES7 468-1CF00-0AA0 468-1连接电缆(50米)6ES7 468-1DB00-0AA0 468-1连接电缆(100米)6ES7 463-2AA00-0AA0 IM463-2接口模块6ES7 964-2AA04-0AB0 IF-964 DP接口模块6ES7 414-3EM05-0AB0 CPU414-3PN/DP 1.4M程序内存/1.4M数据内存 1个IF模板插槽6ES7 416-3ER05-0AB0 CPU416-3PN/DP 5.6M程序内存/5.6M数据内存 1个IF模板插槽CPU6ES7 211-1AD30-0XB06ES7 211-1BD30-0XB06ES7 211-1HD30-0XB06ES7 212-1AD30-0XB06ES7 212-1BD30-0XB06ES7 212-1HD30-0XB06ES7 214-1AE30-0XB06ES7 214-1BE30-0XB06ES7 214-1HE30-0XB0DI/DO6ES7 221-1BF30-0XB06ES7 221-1BH30-0XB06ES7 222-1BF30-0XB06ES7 222-1BH30-0XB06ES7 222-1HF30-0XB06ES7 222-1HH30-0XB06ES7 223-1BH30-0XB06ES7 223-1PH30-0XB06ES7 223-1PL30-0XB06ES7 223-1BL30-0XB0AI/AO6ES7 231-4HD30-0XB06ES7 231-4HF30-0XB06ES7 232-4HB30-0XB06ES7 232-4HD30-0XB06ES7 234-4HE30-0XB06ES7 231-5PD30-0XB06ES7 231-5QD30-0XB0SB6ES7 223-0BD30-0XB06ES7 232-4HA30-0XB0CP6ES7 241-1AH30-0XB06ES7 241-1CH30-0XB0SIM6ES7 274-1XF30-0XA06ES7 274-1XH30-0XA0存储卡6ES7 954-8LB00-0AA06ES7 954-8LF00-0AA0编程软件6ES7 822-0AA00-0YA0其它6GK7 277-1AA10-0AA06EP1 332-1SH716ES7 290-6AA30-0XA06AV6 640-0BA11-0AX0 OP 73 micro s7-200系列用6AV6 640-0CA11-0AX1 TP177 micro 触摸式 s7-200系列用6AV6 648-0AC11-3AX0 Smart 700 彩色 7寸 s7-200系列用6AV6 648-0AE11-3AX0 Smart 1000 彩色 10.2寸 s7-200系列用6AV6 641-0AA11-0AX0 OP 73 单色 3英寸6AV6 641-0BA11-0AX1 OP 77A 单色 4.5英寸6AV6 641-0CA01-0AX1 OP 77B 单色 4.5英寸6AV6 642-0BD01-3AX0 TP 177B 4.3" TFT 宽屏,256色,2 MB用户内存6AV6 642-0AA11-0AX1 TP 177A 单色 5.7英寸6AV6 642-0BC01-1AX1 TP 177B DP 单色 5.7英寸6AV6 642-0BA01-1AX1 TP 177B PN/DP 彩色 5.7英寸6AV6 642-0DC01-1AX1 OP 177B DP 单色 5.7英寸6AV6 642-0DA01-1AX1 OP 177B PN/DP 彩色 5.7英寸6AV6 643-0BA01-1AX0 OP 277-6操作员面板,5.7寸彩色中文显示6AV6 643-0AA01-1AX0 TP277-6 触摸式面板,5.7寸彩色中文显示6AV6 642-0EA01-3AX0 MP177 5.7" Touch,TFT 64K色6AV6 643-0CB01-1AX1 MP277-8 触摸式面板,8寸64K色中文6AV6 643-0DB01-1AX1 MP277-8 按键式面板,8寸64K色中文显示6AV6 643-0CD01-1AX1 MP277-10 触摸式面板,10寸64K色中文6AV6 643-0DD01-1AX1 MP277-10 按键式面板,10寸64K色中文显示6AV6 644-0AA01-2AX0 MP377-12 触摸式面板,12寸64K色中文6AV6 644-0AB01-2AX0 MP377-15 触摸式面板,15寸64K色中文6AV6 644-0AC01-2AX1 MP377-19 触摸式面板,19寸64K色中文6AV6 644-0BA01-2AX1 MP377-12 按键式面板,12寸64K色中文显示6AV6 647-0AA11-3AX0 SIMATIC KTP400 Basic mono PN 3.8"4个功能键 mono STN 显示屏,以太网接口6AV6 647-0AB11-3AX0 SIMATIC KTP600 Basic color PN 5,7"6个功能键 TFT 显示屏,单色以太网接口6AV6 647-0AC11-3AX0 KTP600 Basic color DP 5.7" 256色,6个功能键,MPI/Profi bus DP 接口6AV6 647-0AD11-3AX0 SIMATIC KTP600 Basic color PN 5,7" 6个功能键TFT 显示屏,256 色以太网接口6AV6 647-0AE11-3AX0 SIMATIC KTP1000 基本色 DP 10.4" ,8个功能键TFT 显示器,256 色MPI/PROFIBUS DP 接口6AV6 647-0AF11-3AX0 SIMATIC KTP1000 基本色 PN 10,4" ,8个功能键TFT 显示器,256 色,以太网接口6AV6 647-0AG11-3AX0 SIMATIC TP1500 基本色 PN 15.0" 无功能键TFT 显示器,256 色,以太网接口6AV6 671-1CB00-0AX2 MMC 存储卡 128 MB 用于 OP77B, OP/TP 177B, MOBILE PANEL 177 6AV2124-2DC01-0AX0 KTP400 Comfort 4.3 寸,1600 万色 LED 背光,16:9 宽屏显示,键控 + 触摸,4 MB 用户内存6AV2124-1DC01-0AX0 KP400 Comfort 4.3 寸,1600 万色 LED 背光,16:9 宽屏显示,键控6AV2124-0GC01-0AX0 TP700 Comfort 7 寸,1600 万色 LED 背光,16:9 宽屏显示,触摸屏,12 MB 用户内存6AV2124-1GC01-0AX0 KP700 Comfort 7 寸,1600 万色 LED 背光,16:9 宽屏显示,键控,12 MB 用户内存6AV2124-0JC01-0AX0 TP900 Comfort 9 寸,1600 万色 LED 背光,16:9 宽屏显示,触摸屏,12 MB 用户内存6AV2124-1JC01-0AX0 KP900 Comfort 9 寸,1600 万色 LED 背光,16:9 宽屏显示,键控,12 MB 用户内存6AV2124-0MC01-0AX0 TP1200 Comfort 12 寸,1600 万色 LED 背光,16:9 宽屏显示,触摸屏,12 MB 用户内存6AV2124-1MC01-0AX0 KP1200 Comfort 12 寸,1600 万色 LED 背光,16:9 宽屏显示,键控,12 MB 用户内存6AV6 671-8XB10-0AX1 SD Card 512MB6ES7 648-0DC50-0AA0 USB stick 8G6AV6 545-0BA15-2AX0 TP170A触摸式面板6AV6 545-0BB15-2AX0 TP170B触摸式面板,5.7寸单色中文显示6AV6 545-0BC15-2AX0 TP170B触摸式面板,5.7寸彩色中文显示6AV6 542-0BB15-2AX0 OP170B操作员面板,5.7寸单色中文显示6AV6 545-0CA10-0AX0 TP270-6触摸式面板,5.7寸彩色中文显示6AV6 545-0CC10-0AX0 TP270-10触摸式面板,10.4寸彩色中文显示6AV6 542-0CA10-0AX0 OP270-6操作员面板,5.7寸彩色中文显示6AV6 542-0CC10-0AX0 OP270-10操作员面板,10.4寸彩色中文显示6AV6 542-0AG10-0AX0 MP270B按键式面板,10.4寸彩色中文显示6AV6 545-0AH10-0AX0 MP270B-6 触摸式面板,5.7寸彩色中文6AV6 545-0AG10-0AX0 MP270B-10 触摸式面板,10.4寸彩色中文显示6AV6 542-0DA10-0AX0 MP370按键式面板,12寸256色中文显示6AV6 545-0DA10-0AX0 MP370触摸式面板,12寸256色中文显示6AV6 545-0DB10-0AX0 MP370触摸式面板,15寸256色中文显示6AV6 574-2AC00-2AA1 CF 存储卡 512 MB6ES7 648-0DC30-0AA0 USB stick 1G6ES7 648-0DC40-0AA0 USB stick 2G6AV6 640-0DA11-0AX0 K-TP 178 micro s7-200系列用6EP1 331-5BA00 单相220VAC输入,输出24VDC 0.6A6EP1 331-5BA10 单相220VAC输入,输出24VDC 1.3A6EP1 321-5BA00 单相220VAC输入,输出12VDC 2A6EP1 331-1SH03 单相220VAC输入,输出24VDC 1.3A6EP1 332-2BA00 单相220VAC输入,输出24VDC 3.8A6EP1 332-2BA10 单相120/220VAC输入,输出24VDC 2.5A6EP1 333-2AA01 单相120/230VAC输入,输出24VDC 5A 工业可并联6EP1 333-2BA01 单相120VAC/220VAC输入,输出24VDC 5A6EP1 333-3BA00 单相120VAC/220to500VAC输入,输出24VDC 5A6EP1 334-2AA01 单相120/220VAC输入,输出24VDC ,10A ,工业可并联6EP1 334-2BA01 单相220VAC输入,输出24VDC 10A6EP1 334-3BA00 单相120/220VACto500VAC输入,输出24VDC ,10A6EP1 336-3BA00 单相220VAC输入,输出24VDC 20A 工业可并联6EP1 337-3BA00 单相120/230,40A6EP1 436-2BA10 三相380VAC输入,输出24VDC ,20A ,工业可并联6EP1 436-3BA00 三相380VAC输入,输出24VDC,20A ,新型模块式电源6EP1 437-3BA00 三相380VAC输入,输出24VDC,40A ,工业可并联6EP1 457-3BA00 三相380VAC输入,输出48VDC,20A ,工业可并联SITOP facets6EP1 333-1AL12 单相120/230VAC输入,输出24VDC 5A6EP1 334-1AL12 单相120/230VAC输入,输出24VDC 10A6ES7 307-1EA80-0AA0 单相120/230VAC输入,输出24VDC 10A6EP1 353-2BA00 单相120/230VAC输入,输出24VDC 设定范围3~52DC 10ALOGO! Power 微型电源组6EP1 332-1SH43 单相220VAC输入,输出24VDC 2.5A6EP1 332-1SH52 单相220VAC输入,输出24VDC 4ASITOP 附加设备6EP1 961-3BA10 信号模块,输入范围240VAC/6A,只能和模块式SITOP电源共用6EP1 961-3BA01 缓冲模块,输入24VDC,输出电流40A,可并联,只能和模块式SITOP电源共用6EP1 961-3BA21 冗余模块,输入24VDC,输出电流40A6EP1 961-2BA00 诊断模块,输入24VDC,输出电流4*10ASITOP PS2076EP1 332-1LA00 单相100/220VAC输入,输出24VDC 2.5A6EP1 332-1LA10 单相100/220VAC输入,输出24VDC 4A6EP1 333-2AA00 单相220VAC输入,输出24VDC 5A 工业可并联6EP1 333-2BA00 单相120VAC/220VAC输入,输出24VDC 5A6EP1 334-2AA00 单相220VAC输入,输出24VDC ,10A ,工业可并联6EP1 334-2BA00 单相220VAC输入,输出24VDC 10A6EP1 336-2BA00 单相220VAC输入,输出24VDC 20A6EP1 434-2BA00 三相380VAC输入,输出24VDC 10A 工业可并联6EP1 436-2BA00 三相380VAC输入,输出24VDC ,20A ,工业可并联6EP1 437-2BA00 三相380VAC输入,输出24VDC,30A ,工业可并联6EP1 437-2BA10 三相380VAC输入,输出24VDC,40A ,工业可并联6EP1 252-0AA01 单相230VAC输入,输出41.5V/2A6EP1 331-2BA10 单相120/230VAC输入,输出24VDC 0.5A6ES7 654-8BC03-5DD0 AS 414-3自动化系统,存储卡2MB RAM,用于连接到工业以太网的CP443-1EX20通讯模板 PS407 20A电源 UR1(18槽ALU)6ES7 654-8BC03-3BD0 AS 414-3自动化系统,存储卡2MB RAM,用于连接到工业以太网的CP443-1EX20通讯模板 PS407 10A电源 UR2(9槽ALU)6ES7 654-8CG03-5DD0 AS 416-2自动化系统,存储卡4MB RAM,用于连接到工业以太网的CP443-1EX20通讯模板 PS407 20A电源 UR1(18槽ALU)6ES7 654-8CG03-3BD0 AS 416-2自动化系统,存储卡4MB RAM,用于连接到工业以太网的CP443-1EX20通讯模板 PS407 10A电源 UR2(9槽)6ES7 654-8DH03-5DD0 AS 416-3自动化系统,存储卡8MB RAM,用于连接到工业以太网的CP443-1EX20通讯模板 PS407 20A电源 UR1(18槽)6ES7 654-8DH03-3BD0 AS 416-3自动化系统,存储卡8MB RAM,用于连接到工业以太网的CP443-1EX20通讯模板 PS407 10A电源 UR2(9槽)6ES7 654-8CK03-5DD0 AS 417-4自动化系统,存储卡4MB RAM,用于连接到工业以太网的CP443-1EX20通讯模板 PS407 20A电源 UR1(18槽)6ES7 654-8CK03-3BD0 AS 417-4自动化系统,存储卡4MB RAM,用于连接到工业以太网的CP443-1EX20通讯模板 PS407 10A电源 UR2(9槽)6ES7 654-8EK03-5DD0 AS 417-4自动化系统,存储卡16MB RAM,用于连接到工业以太网的CP443-1EX20通讯模板 PS407 20A电源 UR1(18槽)6ES7 654-8EK03-3BD0 AS 417-4自动化系统,存储卡16MB RAM,用于连接到工业以太网的CP443-1EX20通讯模板 PS407 10A电源 UR2(9槽)6ES7 654-8BA03-3CD0 AS 412-3-1H自动化系统,存储卡2 MB RAM, 用于连到工业以太网的CP 443-1EX20通讯模板, UR2(9槽),PS 407 10 A 电源6ES7 654-8BE03-3CD0 AS 414-4-1H自动化系统,存储卡 2 MB RAM,用于连到工业以太网的CP 443-1EX20通讯模板, UR2(9槽),PS 407 10 A 电源6ES7 654-8CM03-3CD0 AS 417-4-1H自动化系统,4MB存储卡 RAM , 用于连到工业以太网的CP 443-1EX20通讯模板,UR1(9槽),PS407 10A电源6ES7 654-8EM03-3CD0 AS 417-4-1H自动化系统,16MB存储卡 RAM , 用于连到工业以太网的CP 443-1EX20通讯模板,UR1(9槽),PS407 10A电源6ES7 656-8BA33-1CD0 AS 412-3-2H型控制器,2个2MB存储卡RAM,2个CP443通讯处理器CP 443-1EX20,UR2-H(18槽铝制),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源(可冗余)6ES7 656-8BA33-1BD0 AS 412-3-2H型控制器,2个2MB存储卡RAM,2个CP443通讯处理器CP 443-1EX20,UR2-H(18槽铝制),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源6ES7 656-8BA33-2BD0 AS 412-3-2H型控制器,2个2MB存储卡RAM,2个CP443通讯处理器CP 443-1EX20,UR2-H(18槽钢制),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源6ES7 656-8BE33-1BD0 AS 414-4-2H型控制器,2个2MB存储卡RAM,2个CP443通讯处理器,UR2-H(18槽铝制),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源6ES7 656-8BE33-1CD0 AS 414-4-2H型控制器,2个2MB存储卡RAM,2个CP443通讯处理器,UR2-H(18槽铝制),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源(可冗余)6ES7 656-8BE33-2BD0 AS 414-4-2H型控制器,2个2MB存储卡RAM,2个CP443通讯处理器,UR2-H(18槽钢制),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源6ES7 656-8BE33-2CD0 AS 414-4-2H型控制器,2个2MB存储卡RAM,2个CP443通讯处理器,UR2-H(18槽钢制),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源(可冗余)6ES7 656-8CE33-1BD0 AS 414-4-2H型控制器,2个4MB存储卡RAM,2个CP443通讯处理器,UR2-H(18槽铝制),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源6ES7 656-8CE33-1CD0 AS 414-4-2H自动化系统,2个4 MB存储卡 RAM, 2个用于连到工业以太网的CP 443-1EX20通讯模板,UR2-H(18槽),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源(可冗余)6ES7 656-8CE33-2CD0 AS 414-4-2H型控制器,2个4MB存储卡RAM,2个CP443通讯处理器,UR2-H(18槽钢制),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源6ES7 656-8CM33-1BD0 AS 417-4-2H自动化系统,2个4MB存储卡 RAM, 2个用于连到工业以太网的CP 443-1EX20通讯模板,UR2-H(18槽铝制),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源6ES7 656-8CM33-1CD0 AS 417-4-2H自动化系统,2个4MB存储卡 RAM, 2个用于连到工业以太网的CP 443-1EX20通讯模板,UR2-H(18槽铝制),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源(可冗余)6ES7 656-8CM33-2BD0 AS 417-4-2H自动化系统,2个4MB存储卡 RAM, 2个用于连到工业以太网的CP 443-1EX20通讯模板,UR2-H(18槽钢制),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源6ES7 656-8CM33-2CD0 AS 417-4-2H自动化系统,2个4MB存储卡 RAM, 2个用于连到工业以太网的CP 443-1EX20通讯模板,UR2-H(18槽钢制),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源(可冗余)6ES7 656-8DM33-1BD0 AS 417-4-2H自动化系统,2个8MB存储卡 RAM, 2个用于连到工业以太网的CP 443-1EX20通讯模板,UR2-H(18槽铝制),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源6ES7 656-8DM33-1CD0 AS 417-4-2H自动化系统,2个8MB存储卡 RAM, 2个用于连到工业以太网的CP 443-1EX20通讯模板,UR2-H(18槽铝制),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源(可冗余)6ES7 656-8DM33-2BD0 AS 417-4-2H自动化系统,2个8MB存储卡 RAM, 2个用于连到工业以太网的CP 443-1EX20通讯模板,UR2-H(18槽钢制),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源6ES7 656-8DM33-2CB0 AS 417-4-2H自动化系统,2个8MB存储卡 RAM, 2个用于连到工业以太网的CP 443-1EX20通讯模板,UR2-H(18槽钢制),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源(可冗余)6ES7 656-8EM33-1BD0 AS 417-4-2H自动化系统,2个16MB存储卡 RAM, 2个用于连到工业以太网的CP 443-1EX20通讯模板,UR2-H(18槽铝制),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源6ES7 656-8EM33-1CD0 AS 417-4-2H自动化系统,2个16 MB存储卡 RAM, 2个用于连到工业以太网的CP 443-1EX20通讯模板,UR2-H(18槽),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源6ES7 656-8DM33-2BD0 AS 417-4-2H自动化系统,2个16MB存储卡 RAM, 2个用于连到工业以太网的CP 443-1EX20通讯模板,UR2-H(18槽钢制),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS407 10A电源6ES7 656-8DM33-1GD0 AS 417-4-2H自动化系统, 2个8MB存储卡 RAM, 2个用于连到工业以太网的CP 443-1EX20通讯模板,UR2-H(18槽),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS405 10A电源6ES7 656-8EM33-1GD0 AS 417-4-2H自动化系统,2个16 MB存储卡 RAM, 2个用于连到工业以太网的CP 443-1EX20通讯模板,UR2-H(18槽),4个冗余系统同步模板(新)近距离同步(10米以内)和 2个冗余系统光纤连接电缆(1米)(新),2个PS405 10A电源SIMATIC PCS7 Software v7.16ES7 658-1AF17-0YA5 PCS 7 工程师站软件,用于 AS 的工程软件不受限制 PO (过程对象) 6ES7 658-2BA17-0YA0 PCS 7 服务器软件,用于 OS 的工程软件 250 PO / RC8K6ES7 658-2BB17-0YA0 PCS 7 服务器软件,用于 OS 的工程软件 1000 PO / RC32K6ES7 658-2BC17-0YA0 PCS 7 服务器软件,用于 OS 的工程软件 2000 PO / RC64K6ES7 658-2BD17-0YA0 PCS 7 服务器软件,用于 OS 的工程软件 3000 PO / RC100K6ES7 658-2BE17-0YA0 PCS 7 服务器软件,用于 OS 的工程软件 5000 PO / RC150K6ES7 658-2BF17-0YA0 PCS 7 服务器软件,用于 OS 的工程软件 8500 PO / RC256K6ES7 658-2CX17-0YA5 OS客户端软件6ES7 658-5AA17-0YA5 PCS 7 工程师站软件,用于 AS/OS 的工程软件 250 PO / RC8K6ES7 658-5AB17-0YA5 PCS 7 工程师站软件,用于 AS/OS 的工程软件 1000 PO / RC32K6ES7 658-5AC17-0YA5 PCS 7 工程师站软件,用于 AS/OS 的工程软件 2000 PO / RC64K6ES7 658-1AF17-0YA6 PCS 7 工程师站软件租用授权(30天),用于 AS,无限点6ES7 658-2DF17-0YA6 PCS 7 工程师站软件租用授权(30天),用于 OS,无限点6ES7 658-2AA17-0YA0 OS 单站软件, 250 个 PO / RT 8K6ES7 658-2AB17-0YA0 OS 单站软件,1000 个 PO / RT 32K6ES7 658-2AC17-0YA0 OS 单站软件,2000 个 PO / RT 64K6ES7 658-2AD17-0YA0 OS 单站软件,3000 个 PO / RT 100K6ES7 658-2AE17-0YA0 OS 单站软件,5000 个 PO / RT 150K6ES7 652-0XD17-2YB5 SFC 显示和操作序列控件 V7.06ES7 658-1AF07-0YA5 PCS 7 工程师站软件,用于 AS 的工程软件不受限制 PO (过程对象) 6ES7 658-2BA07-0YA0 PCS 7 服务器软件,用于 OS 的工程软件 250 PO / RC8K6ES7 658-2BB07-0YA0 PCS 7 服务器软件,用于 OS 的工程软件 1000 PO / RC32K。
光洋电子凸轮简易操作说明书

光洋电子凸轮简易操作说明书1一面板功能说明:14 程序组:程序组编号的指定/待殊功能的解除。
15 功能:特殊功能编号的指定。
16 原点:原点补偿角度的选择。
17 输出→:输出编号按递增顺序指定。
18输出:输出编号按递减顺序指定。
19方式:选定哪种方式被选定的方式指示灯亮。
20执行:方式的确定;清除的执行。
21消除:输出设定的消除选择;原点补偿的消除选择;解除消除选择;解除输出设定的读出状态。
22背面DIP开关:SW1 角度增加方向选择,CW从编码器的轴侧看顺时钟方向回转角度增加;CCW则反时钟方向回转角度增加。
SW2 编码器分辨率的选择,360使用回转360度的编码器;720 使用720度的编码器。
SW3 凸轮输出/RUN输出的选择;凸轮把所有输出作为凸轮输出使用的情况,RUN 把特定的输出作为输出使用。
二、基本操作:1切换动作方式:用方式键选择方式。
从当前方式开始顺序选取择设定→学习→调整→运转→设定→;按执行键切换到选定方式。
2 按程序组键指定程序组号。
(在兴世机上通常用)3指定输出号:按→输出或←输出键指定输出。
每按一次键,输出显示的灯亮位置发生变化。
4读出输出设定:指定程序组号和输出号后,按读出↑或读出↓输出区设定情况,ON/OFF角度交替读出5消去输出设定:先把要消去的输出设定读出,然后按消去实行键就可以削去该输出设定。
6消去指定输出号内的全部设定:先指定程序组号和输出号,然后按消去→输出实行或消去←输出实行键即可。
7写入输出设定:先指定程序组号和输出号,按+ 或—键设定需要的角度,按写入键输入。
请先按开的角度后按关的角度的顺序设定。
8设定原点补偿:先指定程序组号,转动编码器到机械原点的位置停止,按原点键选择原点的角度,按写入键原点成为0度。
9消去原点补偿:先指定程序组号,按消去原点实行键即可消去原点补偿,显示编码器的输出角度。
10切换特殊功能:按FUN 键特殊功能顺序变换。
→0→1→2→3→4→5→6→7→8→9→A→按BANK 键(程序组),解除特殊功能。
S7-300选型手册介绍

录 • 2013S7-3002概述S7-300• 模块化中型PLC 系统,满足中、小规模的控制要求• 各种性能的模块可以非常好地满足和适应自动化控制任务• 简单实用的分布式结构和通用的网络能力,使得应用十分灵活• 无风扇设计的结构,使用户的维护更加简便• 当控制任务增加时,可自由扩展• 大量的集成功能使它功能非常强劲SIPLUS S7-300• 用于恶劣环境条件下的PLC• 扩展温度范围从-25°C ~ 70°C• 适用于特殊的环境(污染空气中使用)• 允许短时冷凝以及短时机械负载的增加• S7-300采用经过认证的PLC 技术• 易于操作、编程、维护和服务• 特别适用于汽车工业、环境技术、采矿、化工厂、生产技术以及食品加工等领域• 低成本的解决方案更多信息,请参见:/siplus技术规范S7-300的通用技术规范防护等级IP20,符合 IEC 60 529环境温度• 水平安装0 ~ 60°C • 垂直安装0 ~ 40°C 相对湿度5 ~ 95%,无凝结(RH 等级 2,符合 IEC 61131-2)大气压795 ~ 1080 hPa 隔离• 24 V DC 电路测试电压 500 V DC • 230 V AC 电路测试电压 1460 V AC 电磁兼容性符合EMC 规程的要求噪声抑制,符合IEC 61000-6-2,测试符合:IEC 61000-4-2, 61000-4-3, IEC 61000-4-4,IEC 61000-4-5, IEC 61000-4-6辐射干扰符合EN 50081-2测试符合 EN 55011, A 级, 第1组机械等级• 振动,测试条件符合IEC 60068,Part 2-6/10 up 58 Hz ; 恒定振幅 0.075 mm ;58 ~ 150 Hz ;恒定加速度 1 g ;振动周期:在三个互相垂直轴的每个方向上,每根轴为 10 个振动周期。
FM352电子凸轮使用指南

1/13FM352电子凸轮使用指第一章选件、连线1、1选件在选择S7-300PLC的情况下,选择如下元件组成电子凸轮的硬件:1 电子凸轮模块6ES352-1AH01-0AE0,2 703电缆6ES5703-5CF00,3 绝对值编码器6FX2001-5SS12。
1、2连线电子凸轮(方插头)绝对值编码器(圆插头)2 CLS (黄)————————2 CLOCK+3 CLS- (绿)————————1 CLOCK-5 24VDC(粉)————————11 10V—30V7 M (灰)————————12 0V14 DATA-(兰)————————4 DATA-15 DATA+(红)————————3 DATA+第二章STEP7软件设置及编程2.1 FM352电子凸轮的硬件设置在SIMATIC Manager下双击Hardware 进入硬件设置窗口,从工具栏中打开Catalog,添加FM352模块,型号为6ES7 352-1AH01-0AE0。
然后双击FM352 进入电子凸轮控制器设置参数窗口,首先设置System of为degree(2 decimal place), 再双击Axi进入轴参数设置窗口,选择Rotary axis,设置End of the rotary为360.00,其余参数均为缺省值;双击Encoder进入编码器参数设置窗口,Encoder type选择SSI absolute ,Count direction根据需要选择Normal 或Inverter,设置Distance/encoder为360.00、Increments/encoder为8192、Revolution为1 、Band为125KHZ、Frame 为13bit(right**) ;双击Tracks 图框,在Tracks List表中选择Cam controller;双击Cams图框,在Cams list中选择Max. 32 cams或更多凸轮,然后,根据产品需要设置各通道角度,设置完毕存盘退出,下载硬件。
FM352

FM352使用入门 A&D CS1 BeiJing 编者注:该文档主要面对初次使用FM352模板的用户。
内容包括一些调试的步骤,使用经验,等等。
但是,该文档无法取代FM352的手册。
用户可以通过此文档掌握了初步调试和使用模板的方法,但还是要认真、仔细阅读FM352的手册,进一步加深对FM352功能模板的理解,该文档必须和手册结合使用。
热线工程师在技术支持热线上答疑,首先需要用户仔细阅读过FM352手册。
关于FM352功能模板的使用,包括了硬件接线、编码器的选型、多种参数的设置、没有编程的调试、编制程序、故障诊断,等等。
这许多的知识点,无法通过电话线,简单几句话就可以讲述清楚。
该文档,希望对初次使用FM352功能模板的用户,可以起到帮助入门的作用。
FM352模板的使用者,应该具有STEP 7编程的基础知识。
目录1.西门子技术支持网站简介 (3)2.FM352功能简介 (4)3.FM352硬件组态和调试 (4)3.1硬件组态 (5)3.1.1机械轴设置 (6)3.1.2编码器设置 (6)3.1.3Tracks的设置 (7)3.1.4Cams的设置 (8)3.2硬件调试 (8)4.FM352软件编程和调试 (11)4.1编程控制FM352 (11)4.1.1在块中添加相应的程序块 (11)4.1.2分配模板逻辑地址等参数到数据块 (13)FM352使用入门 A&D CS1 BeiJing 4.1.3编程 (15)4.1.4调试程序 (17)4.1.5如何设置参数 (18)4.1.6Counter Cam的使用 (19)4.2参数块的使用(以16 Cam为例) (20)4.2.1复制程序块到FM352项目中 (20)4.2.2程序调试 (20)FM352使用入门 A&D CS1 BeiJing 1. 西门子技术支持网站简介当您在使用西门子产品时可能遇到这样或是那样的问题,没关系,您可以登陆西门子技术支持与服务网站来查找您需要的信息。
西门子 SIMATIC S7-300 可编程控制器 说明书

模块
总线连接器
DIN导轨
DIN导轨
PS CPU (选件) (选件) S7-300 结构
IM SM SM SM SM SM SM
Siemens ST 70.2C·2003
3
综述
SIMATICห้องสมุดไป่ตู้S7-300
结构 简单的结构使得 S7-300 灵活 而易于维护 • DIN 标准导轨安装 只需简单地将模块钩在 DIN标准的安装导轨上, 转动到位,然后用螺栓锁 紧。 • 集成的背板总线 背板总线集成在模块上, 模块通过总线连接器相 连,总线连接器插在机壳 的背后。 • 更换模块简单并且不会 弄错 更换模块时,只需松开 安装螺钉。很简单地拔 下已经接线的前连接 器。在连接器上的编码 防止将已接线的连接器 插到其他的模块上。 可靠的接线端子 对于信号模块可以使用 螺钉型接线端子或弹簧 型接线端子 • TOP 连接 采用一个带螺钉或夹紧连 接的 1 至 3 线系统进行预 接线。或者直接在信号模 块上进行接线。 确定的安装深度 所有的端子和连接器都在 模块上的凹槽内,并有端 盖保护,因此所有的模块 都有相同的安装深度。 没有槽位的限制 信号模块和通讯处理模块 可以不受限制地插到任何 一个槽上, 系统自行组态。
扩展机架(CR)
max.10m 368连接电缆 主机架(CR)
CPU 24V DC
IM 365
扩展能力(水平排列,CPU 314 以上)
4
Siemens ST 70.2C·2003
综述
SIMATIC S7-300
结构(续) 如果用户的自控系统任务需 要多于 8 个信号模块或通讯 处理器模块时,则可以扩展 S7-300 机架(CPU314 以上) • 在 4 个机架上最多可安装 32 个模块 最多3个扩展机架(ER) 可 以接到中央机架(CR) 上 每个机架 (CR/ER) 可以插 入8个模块 • 通过接口模块连接 每个机架上 (CR/ER) 都有 它自己的接口模块。它总 是插在CPU旁边的槽内, 负责与其他扩展机架自 动地进行通讯。 - 通过 IM365 扩展 可扩展 1 个机架, 最长 1 米,电源也是由此扩 展提供。 - 通过 IM360/361 扩展 可扩展 3 个机架, 中央 机 架 (CR) 到 扩 展 机 架 (ER) 及 扩 展 机 架 之 间 的距离最大为 10 米。 • 独立安装 每个机架可以距离其他 机架很远进行安装,两 个机架间(主机架与扩展 机架,扩展机架与扩展 机 架 ) 的 距 离 最 长 为 10 米。 灵活布置 机 架 (CR/ER) 可 以 根 据 最佳布局需要,水平或 垂直安装。
壮大的Cat 352F LRE 长达达机械说明书

352F LRE Hydraulic ExcavatorIntroductionThe Cat 352F LRE machine is built to keep your production numbers up and your owning and operating costs down. The real power comes from the enhanced hydraulic system, which allows youto move tons of material all day long with a great dealof speed and precision. When you add in a quiet operator environment that keeps you comfortable and productive, service points that make your routine maintenance easy, and multiple Cat work tools that help you take on a variety of jobs, you simply won’t find a better long reach excavation machine.ContentsKey Features (2)Specifications (4)Standard Equipment (12)Optional Equipment (13)Notes ...................................................................14Performance• The C13 ACERT engine meets U.S. EPA Tier 4 Final and EU Stage IV emission standards.• Automatic engine speed control lowers rpm based on load for reducedfuel consumption.• Power modes help you more actively manage fuel consumption. Durable Structures• The boom and stick are built with internal baffle plates and are stress relieved for added durability; each undergoes ultrasound inspection to ensure quality and reliability.• Front linkage pins have thick chrome plating, giving them high wear resistance even under water.• Heavy-duty wide undercarriage provides a stable, rugged platform for long reach digging and loading applications.• Track shoes, links, rollers, idlers, and final drives are built with high-tensile strength steel.• Grease-lubricated track link protects moving parts by keeping water, debris, and dust out and grease sealed in to deliver longer wear life and reduced noise when traveling.• Optional guide guards help maintain track alignment to improve the machine’s overall performance – whether you’re traveling on a flat, heavy bed of rock or a steep, wet field of mud.Maintenance• Routine maintenance items like grease points and fluid taps are easy to reach at ground level.• The side-by-side cooling system enables easy cleaning.• Multiple S∙O∙S SM ports and pressure diagnostic taps help prevent maintenance downtime.Key Features Built-in benefits and available optionsComfort• The full-size cab is quiet and comfortable.• Seats are adjustable and feature air suspension and heated and cooled options.• The LCD monitor is easy to navigate and programmable in 44 languages.Versatility• Exclusive Cat attachments allow you totake on a variety of work – quickly andefficiently.• A Cat coupler lets you swap betweenattachments in seconds without leavingthe cab.• Optional Tool Control rememberspressures and flows for up to 20 toolsto enhance uptime.Safety• Smart refuel fills the machine quicklyfrom an external fuel source; itautomatically stops when the fuel tankis full or the fuel source is empty.• The rearview and sideview camerasenhance visibility to help makeoperators more efficient.• Anti-skid plates reduce slipping hazardsin all types of weather conditions.3EngineEngine Model Cat C13 ACERTGross Power – SAE J1995322 kW432 hp Engine Power – ISO 14396317 kW425 hp Net Power – ISO 9249304 kW408 hp Bore130 mm 5.1 in Stroke157 mm 6.2 in Displacement12.5 L763 in3Hydraulic SystemMain System – Maximum Flow (total)770 L/min203 gal/min Swing System – Maximum Flow385 L/min102 gal/min Maximum Pressure – Equipment35 000 kPa5,076 psi Maximum Pressure – Equipment(Lift mode)38 000 kPa5,511 psi Maximum Pressure – Travel35 000 kPa5,076 psi Maximum Pressure – Swing27 500 kPa3,989 psi Auxiliary Circuit – High Pressure300 L/min79 gal/min Auxiliary Circuit – Medium Pressure45 L/min12 gal/min Pilot System – Maximum Flow27 L/min7 gal/min Pilot System – Maximum Pressure4120 kPa598 psi Boom Cylinder – Bore170 mm 6.7 in Boom Cylinder – Stroke3748 mm147.6 in Stick Cylinder – Bore190 mm7.5 in Stick Cylinder – Stroke4306 mm169.5 inB1 Bucket Cylinder – Bore120 mm 4.7 inB1 Bucket Cylinder – Stroke2788 mm109.8 inAir Conditioning SystemThe air conditioning system on this machine contains the fluorinated greenhouse gas refrigerant R134a (Global Warming Potential = 1430). The system contains 1.00 kg of refrigerant, which has a CO2 equivalent of 1.430 metric tonnes.DriveMaximum Travel Speed 4.7 km/h 2.91 mph Maximum Drawbar Pull330 kN74,200 lbfSwingSwing Speed8.7 rpmMaximum Swing Torque187 kN·m137,924 lbf-ftService Refill CapacitiesFuel Tank Capacity720 L190 gal Cooling System50 L13.2 gal Engine Oil (with filter)38 L10 gal Swing Drive (each)10 L 2.6 gal Final Drive (each)15 L 4 gal Hydraulic System (including tank)570 L151 gal Hydraulic Tank407 L108 gal DEF Tank41 L11 galTrackNumber of Shoes (each side)52 piecesNumber of Track Rollers (each side)9 piecesNumber of Carrier Rollers (each side) 3 piecesSoundExterior Sound Power Level –ISO 6395:2008*106 dB(A)Operator Sound Pressure Level –ISO 6396:200869 dB(A)• Hearing protection may be needed when operating with an open operator station and cab (when not properly maintained or doors/ windows open) for extended periods or in a noisy environment.* As per European Union Directive 200/14/EC as amended by 2005/88/EC.352F LRE Hydraulic Excavator Specifications4352F LRE Hydraulic Excavator Specifications DimensionsAll dimensions are approximate.Boom Option LRE Boom11.5 m (37'9")Stick Option LRE Stick8.5 m (27'11")1Shipping Height*3740 mm12'3"2Shipping Length16 460 mm54'0"3Tail Swing Radius3760 mm12'4"4Length to Center of Rollers4340 mm14'3"5Track Length5380 mm17'8"6Ground Clearance, including Shoe Lug Height710 mm2'4"Ground Clearance, not including Shoe Lug Height740 mm2'5"7Track GaugeLong Variable Gauge Undercarriage (expanded)3720 mm12'3"Long Variable Gauge Undercarriage (retracted)3220 mm10'7"8Transport Width without StepsLong Variable Gauge Undercarriage (expanded)600 mm (24") Shoes4320 mm14'2"750 mm (30") Shoes4470 mm14'8"900 mm (35") Shoes4620 mm15'2"Long Variable Gauge Undercarriage (retracted)600 mm (24") Shoes3820 mm12'6"750 mm (30") Shoes3970 mm13'0"900 mm (35") Shoes4120 mm13'6"9Cab Height3390 mm11'2"10Counterweight Clearance**1450 mm4'9"Bucket Type GDBucket Part Number347-6708Bucket Capacity 1.19 m3 1.56 yd3 Bucket Tip Radius1557 mm5'1"*Including shoe lug height.**Without shoe lug height.5352F LRE Hydraulic Excavator Specifications6Working RangesAll dimensions are approximate.510152025303540455055606570Feet510152025303540455101520253035404550Feet1234567891112131415106789101112131454321Boom Option LRE Boom11.5 m (37'9")Stick Option LRE Stick8.5 m (27'11")1Maximum Digging Depth13 040 mm42'9" 2Maximum Reach at Ground Level19 640 mm64'5" Maximum Radius of Working Equipment19 790 mm64'11" 3Maximum Cutting Height14 700 mm48'3" 4Maximum Loading Height12 030 mm39'6" 5Minimum Loading Height2250 mm7'5"6Maximum Depth Cut for 2440 mm (8'0") Level Bottom12 600 mm41'4" 7Maximum Vertical Wall Digging Depth11 280 mm37'0" Bucket Digging Force (ISO)141 kN31,600 lbf Stick Digging Force (ISO)104 kN23,400 lbf Bucket Digging Force (SAE)125 kN28,000 lbf Stick Digging Force (SAE)103 kN23,100 lbf Bucket Type GDBucket Part Number347-6708Bucket Capacity 1.19 m3 1.56 yd3 Bucket Tip Radius1557 mm5'1"352F LRE Hydraulic Excavator Specifications7Operating Weights and Ground Pressures900 mm (35")750 mm (30")600 mm (24")Triple Grouser Shoes Triple Grouser Shoes Triple Grouser Shoes Operating Weights 59 400 kg 130,954 lb 58 600 kg 129,190 lb 57 800 kg 127,427 lb Ground Pressures69 kPa10.0 psi82 kPa11.8 psi101 kPa14.6 psiMajor Component Weightskg lb Base Machine (with boom cylinder, without counterweight, front linkage and track)29 84465,795Lower Structure (without track)Long Variable Gauge Undercarriage 14 50431,976Upper Structure (with boom cylinder, without front linkage and counterweight)For 12 mt (13.2 t) Counterweight 15 34033,818Counterweight 12 mt (13.2 t)12 00026,455Boom (includes lines, pins and stick cylinder)LRE Boom – 11.5 m (37'9")580012,787Stick (includes lines, pins and bucket cylinder)LRE Stick – 8.5 m (27'11")33007,275Track Shoes900 mm (35") Triple Grouser Shoes 670014,770750 mm (30") Triple Grouser Shoes 594013,095600 mm (24") Triple Grouser Shoes 519011,441BucketGD 1.19 m3 (1.56 yd3)7731,706Base machine includes 75 kg (165 lb) operator weight, 90% fuel weight, and undercarriage with center guard.352F LRE Hydraulic Excavator Specifications8LRE Fronts Capacities – Counterweight: 12 mt (13.2 t) – without Bucket – Heavy Lift: OnISO 10567* I ndicates that the load is limited by hydraulic lifting capacity rather than tipping load. The above loads are in compliance with hydraulic excavator lift capacity standard ISO 10567:2007. They do not exceed 87% of hydraulic lifting capacity or 75% of tipping load. Weight of all lifting accessories must be deducted from the above lifting capacities. Lifting capacities are based on the machine standing on a firm, uniform supporting surface. The use of a work tool attachment point to handle/lift objects, could affect the machine lift performance.Lift capacity stays with ±5% for all available track shoes.Always refer to the appropriate Operation and Maintenance Manual for specific product information.(continued on next page)8.5 m (27'11")11.5 m (37'9")352F LRE Hydraulic Excavator Specifications9LRE Fronts Capacities – Counterweight: 12 mt (13.2 t) – without Bucket – Heavy Lift: On (continued)ISO 10567* I ndicates that the load is limited by hydraulic lifting capacity rather than tipping load. The above loads are in compliance with hydraulic excavator lift capacity standard ISO 10567:2007. They do not exceed 87% of hydraulic lifting capacity or 75% of tipping load. Weight of all lifting accessories must be deducted from the above lifting capacities. Lifting capacities are based on the machine standing on a firm, uniform supporting surface. The use of a work tool attachment point to handle/lift objects, could affect the machine lift performance.Lift capacity stays with ±5% for all available track shoes.Always refer to the appropriate Operation and Maintenance Manual for specific product information.8.5 m (27'11")11.5 m (37'9")352F LRE Hydraulic Excavator Specifications10The above loads are in compliance with hydraulic excavator standard EN474-5:2006 + A3:2013, they do not exceed 87% of hydraulic lifting capacity or 75% of tipping capacity with front linkage fully extended at ground line with bucket curled.Capacity based on ISO 7451:2007.Bucket weight with long tips.Maximum Material Density:2100 kg/m3 (3,500 lb/yd3)1800 kg/m3 (3,000 lb/yd3)Caterpillar recommends using appropriate work tools to maximize the value customers receive from our products. Use of work tools, including buckets, which are outside of Caterpillar’s recommendations or specifications for weight, dimensions, flows, pressures, etc. may result in less-than-optimal performance, including but not limited to reductions in production, stability, reliability, and component durability. Improper use of a work tool resulting in sweeping, prying, twisting and/or catching of heavy loads will reduce the life of the boom and stick.352F LRE Hydraulic Excavator Specifications11The above loads are in compliance with hydraulic excavator standard EN474-5:2006 + A3:2013, they do not exceed 87% of hydraulic lifting capacity or 75% of tipping capacity with front linkage fully extended at ground line with bucket curled.Capacity based on ISO 7451:2007.Bucket weight with long tips.Maximum Material Density:2100 kg/m3 (3,500 lb/yd3)1800 kg/m3 (3,000 lb/yd3)Caterpillar recommends using appropriate work tools to maximize the value customers receive from our products. Use of work tools, including buckets, which are outside of Caterpillar’s recommendations or specifications for weight, dimensions, flows, pressures, etc. may result in less-than-optimal performance, including but not limited to reductions in production, stability, reliability, and component durability. Improper use of a work tool resulting in sweeping, prying, twisting and/or catching of heavy loads will reduce the life of the boom and stick.352F LRE Standard Equipment12ENGINE• Cat C13 ACERT diesel engine • Biodiesel capable up to B20• Meets Tier 4 Final and Stage IV emission standards• 2300 m (7,500 ft) altitude capability • Electric priming pump• Automatic engine speed control• Standard, economy and high power modes • Two-speed travel• Side-by-side cooling system • Radial seal air filter• Primary filter with water separator and water separator indicator switch• Fuel differential indicator switch in fuel line • 2×6 micron main filters• 1×10 micron primary fuel line filter HYDRAULIC SYSTEM• Regeneration circuit for boom and stick • Reverse swing dampening valve • Automatic swing parking brake• High-performance hydraulic return filterCAB• Pressurized operator station with positive filtration • Mirror package• Sliding upper door window • Glass-breaking safety hammer • Removable lower windshield within cab storage bracket • Coat hook• Beverage holder • Literature holder• Radio with MP3 auxiliary audio port • Two stereo speakers• Storage shelf suitable for lunch or toolbox • Color LCD display with warning, filter/fluid change, and working hour information • Adjustable armrest• Height adjustable joystick consoles • Neutral lever (lock out) for all controls • Travel control pedals with removable hand levers• Two power outlets, 10 amp (total)• Laminated glass front upper window and tempered other windows UNDERCARRIAGE• Grease Lubricated Track GLT4• Towing eye on base frame • Heavy-duty track rollers • Track motor guardsELECTRICAL• 80 amp alternator • Circuit breakerLIGHTS• Boom light• Cab lights with time delay• Exterior lights integrated into storage box SECURITY• Cat one key security system • Door locks• Cap locks on fuel and hydraulic tanks • Lockable external tool/storage box • Signaling/warning horn• Secondary engine shutoff switch • Openable skylight for emergency exit • Rearview and sideview camerasStandard EquipmentStandard equipment may vary. Consult your Cat dealer for details.352F LRE Optional Equipment13ENGINE• Electric refueling pump with auto shut off • Starting kit, cold weather, –32° C (–26° F)• Jump start receptacle• Quick drains, engine and hydraulic oil HYDRAULIC SYSTEM• Control pattern quick-changer, two way • Additional circuit • Boom and stick lines • High-pressure line • Medium-pressure line• Cat quick coupler line – high- and medium-pressure capable• Quick coupler for high pressure • Tool control systemCAB• Cab hatch emergency exit• Seat, high-back air suspension with heater and cooling• Seat, high-back air suspension with heater • Seat, high-back mechanical suspension • Sunscreen• Windshield wiper, lower with washer • AM/FM radio • Air pre-filter • Travel alarm • Left foot switch • Left pedal• Straight travel pedalUNDERCARRIAGE• Long HD Variable Gauge undercarriage: –600 mm (24") triple grouser shoes, PPR2 –750 mm (30") triple grouser shoes, PPR2 –900 mm (35") triple grouser shoes, PPR2• Guard, full length• Guard, heavy-duty bottom • Center track guiding guard• Segmented (three piece) track guiding guard • Fabricating idler • Casting idler COUNTERWEIGHT • 12.0 mt (13.2 t)FRONT LINKAGE • Bucket linkage–TB family without lifting eye • Long Reach boom –11.5 m (37'9") boom –8.5 m (27'11") stickLIGHTS• Working lights, cab mounted with time delay • HID lights, cab mounted with time delay • Halogen boom lights • HID boom lights SECURITY• FOGS, bolt-on• Guard, cab front, mesh • Guard, vandalism TECHNOLOGY • Cat GRADE • Product Link™Optional EquipmentOptional equipment may vary. Consult your Cat dealer for details.Notes 14Notes15For more complete information on Cat products, dealer services, and industry solutions, visit us on the web at © 2019 CaterpillarAll rights reservedMaterials and specifications are subject to change without notice. Featured machines in photos may include additional equipment. See your Cat dealer for available options.CAT, CATERPILLAR, LET’S DO THE WORK, their respective logos, “Caterpillar Yellow,” the “Power Edge” and Cat “Modern Hex” trade dress as well as corporate and product identity used herein, are trademarksof Caterpillar and may not be used without permission.AEHQ8184-01 (07-2019) Replaces AEHQ8184(Eur, N Am)。
运动控制器电子凸轮 (1)

海川运动控制器电子凸轮是一种用于自动化控制系统的设备,它可以模拟机械凸轮的运动轨迹,从而实现自动化控制。
下面是对海川运动控制器电子凸轮的操作步骤:1.连接设备:将海川运动控制器电子凸轮与计算机或其他控制器连接,确保通讯正
常。
2.设置参数:根据实际需求,设置电子凸轮的参数,包括运动轨迹、速度、加速度
等。
3.导入程序:将自动化程序导入到海川运动控制器中,或者使用可视化编程工具编
写程序。
4.调试程序:在确保连接正常后,调试程序,观察电子凸轮的运动轨迹是否符合要
求。
5.运行程序:确认程序无误后,启动程序,让电子凸轮按照预设的运动轨迹运行。
6.监控状态:监控电子凸轮的运行状态,包括位置、速度、加速度等参数,确保正
常运行。
7.维护保养:定期对电子凸轮进行维护保养,包括清洁、润滑等,以保证其正常运
行。
以上是对海川运动控制器电子凸轮的基本操作步骤,具体的操作方法可能会因不同的设备型号和实际需求而有所不同。
在进行操作前,建议仔细阅读设备说明书或联系专业技术人员进行指导。
西门子plc选型必备2011

CPU6ES7 211-0AA23-0XB0 CPU221 DC/DC/DC,6输入/4输出6ES7 211-0BA23-0XB0 CPU221 继电器输出,6输入/4输出6ES7 212-1AB23-0XB8 CPU222 DC/DC/DC,8输入/6输出6ES7 212-1BB23-0XB8 CPU222 继电器输出,8输入/6输出6ES7 214-1AD23-0XB8 CPU224 DC/DC/DC,14输入/10输出6ES7 214-1BD23-0XB8 CPU224 继电器输出,14输入/10输出6ES7 214-2AD23-0XB8 CPU224XP DC/DC/DC,14DI/10DO,2AI/1AO6ES7 214-2BD23-0XB8 CPU224XP 继电器输出,14DI/10DO,2AI/1AO6ES7 216-2AD23-0XB8 CPU226 DC/DC/DC,24输入/16输出6ES7 216-2BD23-0XB8 CPU226 继电器输出,24输入/16输出USB-PPI USB接口的西门子PLC S7-200编程电缆,带指示灯,对应西门子产品:6ES7 901-3DB30-0XA0 ,通信距离达2公里,电缆长度为3米。
USB-PPI+ 隔离型USB 接口的S7-200PLC 编程电缆,带指示灯,对应西门子产品:6ES7 901-3DB30-0XA0,通信距离达2公里,电缆长度3米。
PC-PPI RS232 接口的西门子S7-200PLC 编程电缆,RS232/PPI 接口,对应西门子产品号:6ES7 901-3CB30-0XA0电缆长度为2米(2-50米可供选择)。
USB-MPI+ 隔离型USB接口的西门子S7-300编程适配器,带通信指示灯,对应型号6ES7 972-0CB20-0XA0 通信距离可达1公里(187.5Kbps 时)长度5米。
PC-MPI+ 对应西门子产品号:6ES7 972-0CA21-0XA0,西门子S7-300PLC编程通信适配器,光电隔离型,外观同西门子,含RS232电缆(5米)。
横切电子凸轮说明
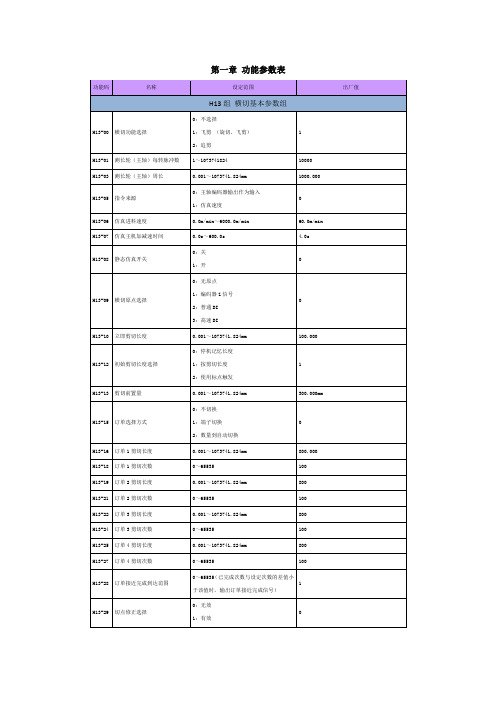
第一章功能参数表附:报警代码及说明第二章调试前需要了解信息2.1了解机械参数2.1.1 相关的机械参数:送料辊直径,送料机构传动比,送料测长编码器线数;裁刀直径,裁刀机构传动比,以及是否多刀(裁刀转一圈的剪切次数);根据这些参数,计算如下参数:(1)测长轮每转脉冲数、测长轮周长信息。
(2)裁刀周长;(3)裁刀传动比;(4)裁刀周长,飞剪需要这个参数;(5)裁刀传动比,飞剪需要这个参数;(6)机台长度,该参数设置的是裁刀允许运动的最大距离,设置时不要超过用户前后限位间距离的80%,追剪需要此参数;(7)追剪机台电机转一周对应导程和传动比,追剪需要此参数;(8)进料速度范围(m/min)内的进料电机速度范围(rpm/min);(9)进料速度范围(m/min)内的裁刀电机速度范围(rpm/min);(10)进料检测精度。
即进料编码器1个脉冲(4倍频前)对应的进料长度;(11)裁刀检测精度,即裁刀编码器1个脉冲对应的裁刀转过的长度。
根据进料检测精度、裁刀剪切精度,可以判断是否有可能达到是否能满足精度要求;根据进料电机速度范围、裁刀电机速度范围等信息,可以判断现场的机械传动比和编码器选型是否合理。
2.1.2裁刀最高线速度的关系:剪切长度可以比裁刀周长短。
剪切长度越短,裁刀最高线速度会越高,所以不能短太多。
短料剪切时,主机最高速度需要降额处理。
可参考下表:2.1.3 影响剪切精度的可能因素:除了机械精度、编码器精度、伺服的控制精度影响剪切精度之外,还可能有以下因素影响:(1)进料速度波动大。
可能电机速度不稳,或者进料测长机构造成信号不稳;(2)编码器安装不妥。
例如与电机不同心、打滑等;(3)裁刀加减速太剧烈。
一般在剪切长度比裁刀周长短很多,或者进料速度很高时出现;(4)选型不合理。
例如电机速度太低,可能是传动比太小造成。
或者速度太高,如超过了额定转速;(5)剪切点信号受干扰。
例如裁刀转一圈来了2次剪切点信号。
细纱机电子凸轮说明书
细纱机电子凸轮成形一、电子凸轮成形系统优势:1、传统的机械凸轮成形在调整工艺参数的时候,需要更换部件,工作量大,停机时间长。
而电子凸轮操作简便灵活,停机时间短。
2、机械凸轮经过长时间运行后,会出现凸轮磨损,因而造成凸轮打顿,影响成形质量。
而电子凸轮不存在此类现象。
3、电子凸轮的成形由于是通过程序软件设计实现卷绕成形的,参数设置范围广,成形要好于机械凸轮,这点从络筒机的速度可以得到验证,在相同情况下比较,通过电子凸轮成形的满纱管在络筒机上的运行速度要大大高于机械凸轮。
4、电子凸轮提高了细纱机二次开车的留头率,由于电子凸轮在编程上的灵活性,通过调整钢领板落纱下降速度、开车下降速度和落纱停车位置等,可以提高二次开车的细纱留头率。
5、解决纬纱脱圈问题纺纬纱,常规机械凸轮成型很难满足布机的工艺要求,造成在布机上脱圈现象严重,使用电子凸轮成形后,可以按照特殊工艺要求纺保险纱,从而解决了布机脱圈问题。
在实际应用中获得用户认可,效果非常好。
6、纺纱动程可以任意调整在纺不同的纱,工艺要求不同,有的纱脱圈可以通过加大纺纱动程解决,由于机械凸轮纺纱动程不可以任意修改,而电子凸轮成形的动程可以任意修改,在防止脱圈办法更多。
7、增加满管顶部缠绕圈功能电子凸轮可以在落纱的时候,上升到纱管顶部适当的位置,完成缠绕几圈,以便络筒机能快速准确的找头。
这个是传统机械凸轮无法做到的,该功能可根据用户需求增加使用。
二、电子凸轮成形系统的组成:1、电气部分主要由交流伺服系统、PLC可编程控制器、开关电源、触摸屏和接近开关组成,系统的输入部分由细纱机信号接入,即风机启动,主机启动,中途落纱,钢领板下降信号。
系统的输出通过PLC输出模块给主机,即下纲领板信号、关主电机信号、满纱信号、主机刹车信号和伺服故障信号。
所有工艺参数和点动操作都在触摸屏上完成。
2、机械部分主要由星型涡轮减速机构、伺服电机、链轮、链条和辅助部件构成。
三、调试说明:. 1、首先将电气部分安装到位,按照图纸正确接线,伺服驱动器的输入信号与主机输入信号共用,伺服输入信号的24V电源来自主机的24V电源,输入信号有风机启动、主机启动(低速启动和高速启动)、中途停车、中途落纱、紧急停车。
光洋电子凸轮简易操作说明书
光洋电子凸轮简易操作说明书1一面板功能说明:14 程序组:程序组编号的指定/待殊功能的解除。
15 功能:特殊功能编号的指定。
16 原点:原点补偿角度的选择。
17 输出→:输出编号按递增顺序指定。
18输出:输出编号按递减顺序指定。
19方式:选定哪种方式被选定的方式指示灯亮。
20执行:方式的确定;清除的执行。
21消除:输出设定的消除选择;原点补偿的消除选择;解除消除选择;解除输出设定的读出状态。
22背面DIP开关:SW1 角度增加方向选择,CW从编码器的轴侧看顺时钟方向回转角度增加;CCW则反时钟方向回转角度增加。
SW2 编码器分辨率的选择,360使用回转360度的编码器;720 使用720度的编码器。
SW3 凸轮输出/RUN输出的选择;凸轮把所有输出作为凸轮输出使用的情况,RUN 把特定的输出作为输出使用。
二、基本操作:1切换动作方式:用方式键选择方式。
从当前方式开始顺序选取择设定→学习→调整→运转→设定→;按执行键切换到选定方式。
2 按程序组键指定程序组号。
(在兴世机上通常用)3指定输出号:按→输出或←输出键指定输出。
每按一次键,输出显示的灯亮位置发生变化。
4读出输出设定:指定程序组号和输出号后,按读出↑或读出↓输出区设定情况,ON/OFF角度交替读出5消去输出设定:先把要消去的输出设定读出,然后按消去实行键就可以削去该输出设定。
6消去指定输出号内的全部设定:先指定程序组号和输出号,然后按消去→输出实行或消去←输出实行键即可。
7写入输出设定:先指定程序组号和输出号,按+ 或—键设定需要的角度,按写入键输入。
请先按开的角度后按关的角度的顺序设定。
8设定原点补偿:先指定程序组号,转动编码器到机械原点的位置停止,按原点键选择原点的角度,按写入键原点成为0度。
9消去原点补偿:先指定程序组号,按消去原点实行键即可消去原点补偿,显示编码器的输出角度。
10切换特殊功能:按FUN 键特殊功能顺序变换。
→0→1→2→3→4→5→6→7→8→9→A→按BANK 键(程序组),解除特殊功能。
伺服的电子凸轮有什么?如何使用?动画展示“追剪、飞剪”!
伺服的电子凸轮有什么?如何使用?动画展示“追剪、飞剪”!技成培训▲ 图1平皮带传动发生相位偏移如果只是单纯用来传输动力(例如引擎中的发电机皮带),相位的偏移并无关系;但若作为同步的控制(例如引擎中控制汽门,曲轴与点火时机的皮带),就会发生问题!以机构而言,要避免相位偏移,可以把一般的皮带换成正时皮带(Timing Belt)跟齿轮!如下图所示,即使长时间运转,主/从轴的相位都能维持一致!就是彼此达到同步状态!▲ 图2正时皮带可维持相位同步讲了这么多,终于可以进入正题了!如果把上述的机械传动改成伺服的电子凸轮,效果会是如何呢?如下图三,我们将皮带拆除,用编码器采集主轴的位置,以A/B相脉波的方式传给伺服,伺服以直线的电子凸轮来驱动从轴做跟随:▲ 图3将皮带传动改成伺服电子凸轮-发生偏移实测结果发现,相位发生了偏移,因为编码器的脉波受到干扰,而且会随时间累积,造成偏移愈趋明显!而脉波干扰是很难完全抑制的,在工厂多变的环境下,不论配线如何讲究,脉波偏差总会发生,只是时间早晚的问题!因此,单纯以编码器脉波驱动电子凸轮,无法达到正时皮带的同步效果,顶多是平皮带的效果而已!那么该怎么改善呢?其实我们可以效仿正时皮带,因为它是带"齿"的,所以不会滑动造成累积误差!那我们就用一个假想的"齿"来模仿它!并把齿的宽度(就是齿与齿的距离)定义清楚,这样就可以造出一个虚拟的正时皮带,就是所谓的”同步轴”!这个"齿"可以用主轴上任何一个周期性出现的信号(或编码器的Z)来表示,如下图:▲ 图4使用同步轴-避免相位偏移在主轴上安装一个标记当作"齿",并用感测器将信号读进伺服的DI,再根据编码器的型号得知主轴转一圈应该会有R个脉波。
由于一圈只有一个齿,所以齿的宽度就是R(单位是主轴的脉波)。
如此,只要伺服每感测到一个"齿",就知道应该要收到R个脉波,如果数量不对,就可加以补偿,让脉波总数一直跟齿数维持正确的关系,如此便可让主/从轴的相位永不偏移,保持同步!这功能在台达ASD-A2 与 ASD-M-R伺服里都已具备,在凸轮的主轴来源 P5-88.Y里,选择实体脉波相当于使用平皮带;选用同步轴就相当于使用正时皮带,非常方便!设定方式请参考 A2凸轮同步轴的设定方法!注:克服凸轮主轴脉波漏失还有其他方法,例如:1、采用虚拟主轴不会漏脉波,但是主轴也必须使用伺服马达,无法采用一般马达外加编码器的方式!2、利用凸轮对位虽然可以做到,但通常会保留给从轴的修正使用,因为从轴的误差补偿会用到!▲ 追剪功能▲ 飞剪功能。
S7-300全教程
第一章 S7-300/400的基本结构1、 S7-300/400属于模块式PLC,主要由机架、CPU模块、信号模块、功能模块、接口模块、通信处理器、电源模块和编程设备(工程师、操作员站和操作屏)组成。
图1-1 PLC控制系统示意图PLC的主要生产厂家:德国的西门子(Siemens)公司,美国Rockwell公司所属的AB公司,GE-Fanuc公司,法国的施耐德(Schneider)公司,日本的三菱和欧姆龙(OMRON)公司。
PLC的工作过程表1-1 逻辑运算关系表与或非Q4.0=I0.0*I0.1 Q4.1 = I0.2+I0.3 Q4.2 =/I0.4I0.0 I0.1 Q4.0 I0.2 I0.3 Q4.1 I0.4 Q4.20 0 0 0 0 0 0 10 1 0 0 1 1 1 01 0 0 1 0 11 1 1 1 1 1在CPU模块上有存储器(用来存放系统程序、用户程序、逻辑变量和其它一些信息),包括ROM和RAM。
可通过扩展槽扩展用户RAM。
l RAM:主程序区OB1+子程序区(FB、FCB、定时中断块等)断电时由锂电池供电(几年)以免RAM 中信息丢失。
锂电池电压< 规定值,灯报警,换电池(期间靠电容充电几分钟)。
l PLC采用循环执行用户程序的方式。
OB1是用于循环处理的组织块(主程序),它可以调用别的逻辑块,或被中断程序(组织块)中断。
在起动完成后,不断地循环调用OB1,在OB1中可以调用其它逻辑块(FB, SFB, FC或SFC)。
循环程序处理过程可以被某些事件中断。
在循环程序处理过程中,CPU并不直接访问I/O模块中的输入地址区和输出地址区,而是访问CPU内部的输入/输出过程映像区。
批量输入、批量输出。
梯形图中Q4.0的线圈(称为内部线圈)―通电‖时,对应的输出过程映像位为1状态。
信号经输出模块隔离和功率放大后,继电器型输出模块中对应的硬件继电器的线圈(外部线圈)通电,其常开触点闭合,使外部负载通电工作。
电子凸轮参数说明
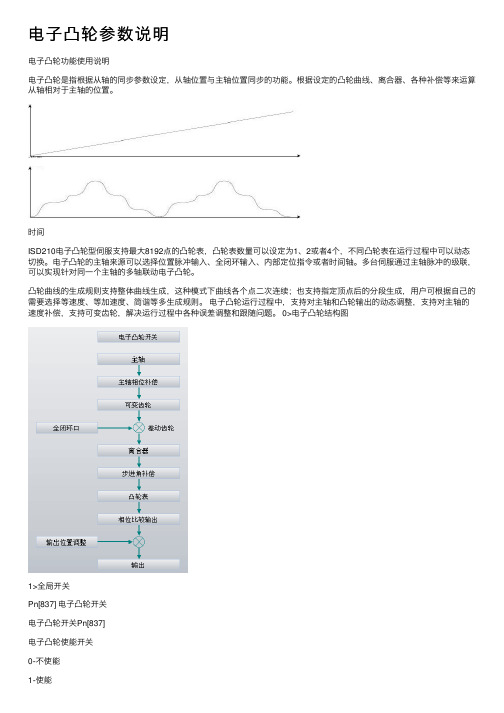
电⼦凸轮参数说明电⼦凸轮功能使⽤说明电⼦凸轮是指根据从轴的同步参数设定,从轴位置与主轴位置同步的功能。
根据设定的凸轮曲线、离合器、各种补偿等来运算从轴相对于主轴的位置。
时间ISD210电⼦凸轮型伺服⽀持最⼤8192点的凸轮表,凸轮表数量可以设定为1、2或者4个,不同凸轮表在运⾏过程中可以动态切换。
电⼦凸轮的主轴来源可以选择位置脉冲输⼊、全闭环输⼊、内部定位指令或者时间轴。
多台伺服通过主轴脉冲的级联,可以实现针对同⼀个主轴的多轴联动电⼦凸轮。
凸轮曲线的⽣成规则⽀持整体曲线⽣成,这种模式下曲线各个点⼆次连续;也⽀持指定顶点后的分段⽣成,⽤户可根据⾃⼰的需要选择等速度、等加速度、简谐等多⽣成规则。
电⼦凸轮运⾏过程中,⽀持对主轴和凸轮输出的动态调整,⽀持对主轴的速度补偿,⽀持可变齿轮,解决运⾏过程中各种误差调整和跟随问题。
0>电⼦凸轮结构图1>全局开关Pn[837] 电⼦凸轮开关电⼦凸轮开关Pn[837]电⼦凸轮使能开关0‐不使能1‐使能只有凸轮开关使能时,才能使⽤电⼦凸轮的各项功能。
凸轮开关关闭时,当前主轴位置、当前凸轮相位将被复位。
2>主轴Pn[838] 主轴来源选择Pn[839] 时间轴周期脉冲量Pn[840]、Pn[841] 当前主轴位置主轴来源选择Pn[838]选择电⼦凸轮的主轴0‐位置指令脉冲,可以来⾃低速脉冲⼝,也可以来⾃⾼速脉冲⼝,由参数Pn[407]‐Pn[416]配置1‐全闭环⼝脉冲,可以来⾃CN6上的全闭环脉冲,RS422电平标准,AB相2‐定位指令,可以来⾃PLC内部定位指令,主轴来源选择定位指令时,电⼦凸轮的输出位置调整功能⽆效3‐时间轴,可以来⾃时间轴,参考Pn[839]时间轴周期脉冲量Pn[839]主轴来源选择时间轴时,设定每0.5mS主轴的位置增量‐32768~32767当前主轴位置Pn[840]、Pn[841]反映凸轮使能后主轴的位置,‐2147483648~2147483647,超出范围后循环。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1/13
FM352电子凸轮使用指
第一章选件、连线
1、1选件
在选择S7-300PLC的情况下,选择如下元件组成电子凸轮的硬件:1 电子凸轮模块6ES352-1AH01-0AE0,2 703电缆6ES5703-5CF00,3 绝对值编码器6FX2001-5SS12。
1、2连线
电子凸轮(方插头)绝对值编码器(圆插头)
2 CLS (黄)————————2 CLOCK+
3 CLS- (绿)————————1 CLOCK-
5 24VDC(粉)————————11 10V—30V
7 M (灰)————————12 0V
14 DATA-(兰)————————4 DATA-
15 DATA+(红)————————3 DATA+
第二章STEP7软件设置及编程
2.1 FM352电子凸轮的硬件设置
在SIMATIC Manager下双击Hardware 进入硬件设置窗口,从工具栏中打开Catalog,添加FM352模块,型号为6ES7 352-1AH01-0AE0。
然后双击FM352 进入电子凸轮控制器设置参数窗口,首先设置System of为degree(2 decimal place), 再双击Axi进入轴参数设置窗口,选择Rotary axis,设置End of the rotary为360.00,
其余参数均为缺省值;双击Encoder进入编码器参数设置窗口,Encoder type选择SSI absolute ,Count direction根据需要选择Normal 或Inverter,设置Distance/encoder为360.00、Increments/encoder为8192、Revolution为1 、Band为125KHZ、Frame 为13bit(right**) ;双击Tracks 图框,在Tracks List表中选择Cam controller;双击Cams图框,在Cams list中选择Max. 32 cams或更多凸轮,然后,根据产品需要设置各通道角度,设置完毕存盘退出,下载硬件。
注意:在各通道角度设置时,应根据检测角度值与实际角度值的差值进行修正,修正值的计算举例见以下公式:设原理图P44角度表中的角度为DEG1,修正值为DEG@,通道设定值为DEG.则: DEG=DEG1-DEG@.
注意:若修正值改变,各通道角度需重新输入,因此各通道角度设定最好在滑块原点校对完毕且经有关人员确认准确后进行,以免频繁改变通道值.
2、2 软件编程
2、2、1 有关电子凸轮的数据存放在DB7中;在OB100中调
用FC0,上电时初始化FM352电子凸轮模块,具体语句为:
CALL FC0 D
INO:=7
2、2、2 在主程序OB1中调用FC1,以完成电子凸轮模块的
使能控制,具体程序为:
CALL FC 1
IN0 :=7
RET_V AL:=DB7.DBW382
AN M 77.7
= DB7.DBX 15.4
= DB7.DBX 38.4 //速度使能
L W#16#FFFF
T DB7.DBW 16
2.2.3, 电子凸轮模块故障检测,具体程序为:
A(
L DB7.DBW 382
L -1
==I
)
S DB7.DBX 372.5
A I 25.0
R DB7.DBX 372.5
若数据块DB7.DBW382 检测到的值为-1,则将数据位DB7.DBX372.5 置1,再相应控制压力机其他动作,故障清除后将模块复位即可.
2.2.44角度显示,电子凸轮实际角度值存储于数据块DB7.DBD26中. 经修正及转换后方可显示在控制面板上,具体程序为:
A(
L DB7.DBD 26 //实际角度值
L L#13019 //修正值
+D
T DB7.DBD 384
AN OV
SA VE
CLR
A BR
)
A(
L DB7.DBD 384
L L#36000
>=D
)
JNB _02f
L DB7.DBD 384
L L#36000
-D
T DB7.DBD 384
A(
A(
L DB7.DBD 384 //修正后的角度值
DTB
T DB7.DBD 388
AN OV
SA VE
CLR
A BR
)
JNB _030
L DB7.DBB 389
T QB 65
SET
SA VE
CLR
_030: A BR
)
JNB _031
L DB7.DBB 390
T QB 64
注意,角度修正值对于不同压力机可能不相同.
2,2,5:编码器断轴检测
具体程序为:
1, CLAT 信号
A Q 69.4
A Q 69.6
= DB7.DBX 372.2
2,速度检测
A DB7.DBX 372.2 //CLAT信号
L S5T#1S
SD T 100 //启动时间
A T 100
A(
L DB7.DBD 132 //速度实际值
L L#500000 //速度阈值
<D
)
S DB7.DBX 372.6 //速度不到时置位
A I 25.0
R DB7.DBX 372.6 //故障复位
NOP 0
2,2,6 制动监控
具体程序为:
1.制动角检测
A(
O DB7.DBX 372.2 //CLAT 信号
O I 25.7 //微调选择
)
JNB _02e
L DB7.DBD 26
T DB7.DBD 374
A(
A(
A(
O I 28.1 //连续选择
O I 28.3 //单次选择
)
A I 25.4 //行程选择
O I 25.7 //微调选择
)
JNB _095
L DB7.DBD 26
L DB7.DBD 374
-D
T DB7.DBD 378
AN OV
SA VE
CLR
_095: A BR
)
A(
L DB7.DBD 378
L L#0
<D
)
JNB _096
L DB7.DBD 378
L L#36000
+D
T DB7.DBD 378 //制动角
2 制动监控
具体程序为:
A(
L DB7.DBD 378 //制动角
L L#30
>D
)
S DB7.DBX 372.7 //制动角异常置位
A I 25.0 //故障复位
R DB7.DBX 372.7
NOP 0
2,2,7 自动进角
对于可调速的压力机,要使滑块在不同转速时准确停于上死点,须进行自动进角设定,具体程序为:
A(
L DB1.DBD 0 //行程速度(可调)
L L#6
>=D
)
A(
L DB1.DBD 0 //行程速度(可调)
L L#9
<=D
)
A(
L DB7.DBD 384 //修正后的角度值
L L#18000
>=D
)
A(
L DB7.DBD 384 //修正后的角度值
L L#32000 //停止角度(可调)
<=D
)
= DB7.DBX 398.0 //定点停机信号
对于不同行程速度(DB1.DBD0),对应于不同的停止角度(如L#32000),经设定后滑块可准确停在上死点.
附:
电子凸轮角度对应表
第三章PROFIBUS 组态与编程
1.首先在STEP 7 软件中打开硬件配置画面,在选择CPU315-2DP (具有DP接口的CPU)的中央处理器后,再加上PROFIBUS 网络系统,然后在网络中加入相应的从站元件,然后随着提示设置好相应的站号,(注意:两个从站元件不能设置相同的号,不然会造成PROFIBUS 系统错误,在CPU 面板上的系统错误指示灯会闪亮,然后设置好各个从站对应的数据地址,存盘编译,再将其下载到CPU 中。
2.在程序中启用相应的从站地址,具体程序如下:
L PID 292
DTR
T DB5.DBD 0
SET
SA VE
CLR
A BR
)
A(
L DB5.DBD 0
L 3.000000e+005
<R
)
L DB5.DBD 0
L 1.677722e+007
+R
T DB5.DBD 0
A(
A(
L DB5.DBD 0
L 4.096000e+003
/R
T DB5.DBD 24
AN OV
SA VE
CLR
A BR
)
JBN -002
L DB5.DBD 24
L 5.396200e+001
*R
T DBD.DBD 32
AN OV
CLR
-002:A BR
)
JNB -003
L DB5.DBD 32
L DB5.DBD 36
+R
T DBD.DBD 40
L DB5.DBD 40
RND
T DB1.DBD 8
其中,PID292便是从从站读取的数据,经过一系列的数据转换得到DBD.DBD8 就是所要取得的值,比如装模高度值。