机动车外廓尺寸检测仪系统的设计与运用分析_赵伟杰
新疆《车辆外廓尺寸测量仪校准规范》正式发布

新疆《车辆外廓尺寸测量仪校准规范》正式发布
近日,新疆地方校准规范《车辆外廓尺寸测量仪校准规范》正式发布,将于2017年6月1日起在全区执行。
车辆外廓尺寸测量仪是用于对机动车外廓尺寸(长、宽、高)等参数进行测量的自动化计量器具。
根据GB21861-2014《机动车安全技术检验项目和方法》的要求,机动车检测站使用车辆外廓尺寸测量仪对机动车的特征参数之一的外廓尺寸进行检查,确保符合机动车国家安全技术标准。
为保证车辆外廓尺寸测量仪量值的准确可靠,需对其进行校准,目前,国家尚未发布车辆外廓尺寸测量仪的校准规范。
为解决该测量仪量值溯源的需求,自治区质量技术监督局委托自治区计量测试研究院起草和制定JJF(新)04-2017《汽车外廓尺寸检测仪》校准规范,对该检测仪的校准条件、校准项目和校准方法、校准结果等方面就行了规范,进一步增强了计量工作对企事业单位生产经营及科技进步的技术支撑作用。
机动车外廓尺寸检测仪系统的设计与运用分析_赵伟杰

机动车所有人:
手机电话:
地址/邮编:
检验员建议:
检验员签字:
注1:判定栏中填 “○”为合格,“╳”为不合格,“—”表示不适用于送检
车。
注2:当车辆外廓尺寸、整备质量检验项目使用仪器自动测量并打印在仪器设
备检验表格中时,本表相应参数可不填。
251
四川省第十二届汽车行业学术年会论文
3.结束语 本系统的处理方法是针对超限车辆现场检测解决的有效途径,综合应用激光
给出有车的信号,那么测长相机开始保存所有有车时的图像,一直到车辆驶出虚
拟线圈位置。而测宽和测高相机组则进行实时差分和累积计算,而不用保存图像;
当得到车辆驶出信号时,各测量模块分别计算出车辆的长、宽、高值。
系统软件的工作界面分为主程序区、数值显示区、信息显示区和操作区。数
值显示区用于显示长、宽、高和图像,信息显示区用于显示数据处理过程的参数。
③当得到有车驶出信号时,开始解算车辆的长宽高参数。宽高参数的解算是 通过内存中存储的差分累积图像得到的,自动查找宽和高的极限轮廓位置,并以
244
四川省第十二届汽车行业学术年会论文
预先标定好的参数来解算;长度参数的解算,是通过对车辆图像进行拼接并解算 得到的。
④显示和存档测量结果,并等待另一辆车的进入。 系统硬件架构图 3 所示。
246
四川省第十二届汽车行业学术年会论文
图 6 差分累积图像
再通过分析,得到边界的像素坐标(图像中红色竖线标记),并用预先标定好 的参数,得到视线与地面的交点:W1~W4。其中 Ki 为相机位置与地面交点之间连 线之间的两两交点,通过对 Ki 的分析,可以得到车外廓的左极限。车外廓的右极 限位置和车外廓高也可同理得到。
②当得到有车进入信号时,所有相机开始采集、处理和存储图像数据。相机 之间的采集是异步的,但通过多线程采集技术,可以提高采集帧率,获得最大数 量的图像,且相机间的采集时间间隔缩短;同步处理技术则保证了数据的一致性 和处理的稳定性。我们对测宽高相机和测长相机进行分组控制,这样可保障测宽 高影像的数据同步处理,也能保障测长相机的延时短,获取图像数量多。测宽高 相机对所测图像数据进行实时处理,并存储到内存中,得到差分累积图像;测长 相机把所测图像校正后,存储到硬盘中。
车辆外轮廓尺寸检测仪的设计和应用
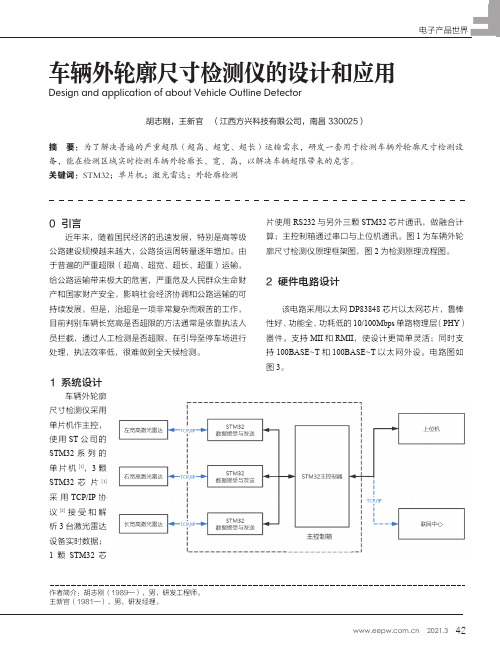
42 2021.3电子产品世界车辆外轮廓尺寸检测仪的设计和应用Design and application of about Vehicle Outline Detector胡志刚,王新官 (江西方兴科技有限公司,南昌 330025)摘 要:为了解决普遍的严重超限(超高、超宽、超长)运输需求,研发一套用于检测车辆外轮廓尺寸检测设备,能在检测区域实时检测车辆外轮廓长、宽、高,以解决车辆超限带来的危害。
关键词:STM32;单片机;激光雷达;外轮廓检测0 引言近年来,随着国民经济的迅速发展,特别是高等级公路建设规模越来越大,公路货运周转量逐年增加。
由于普遍的严重超限(超高、超宽、超长、超重)运输,给公路运输带来极大的危害,严重危及人民群众生命财产和国家财产安全,影响社会经济协调和公路运输的可持续发展,但是,治超是一项非常复杂而艰苦的工作,目前判别车辆长宽高是否超限的方法通常是依靠执法人员拦截,通过人工检测是否超限,在引导至停车场进行处理,执法效率低,很难做到全天候检测。
1 系统设计车辆外轮廓尺寸检测仪采用单片机作主控,使用ST 公司的STM32系列的单片机[1],3颗STM32芯片[1]采用TCP /IP 协议[2]接受和解析3台激光雷达设备实时数据;1颗STM32芯片使用RS232与另外三颗STM32芯片通讯,做融合计算;主控制箱通过串口与上位机通讯。
图1为车辆外轮廓尺寸检测仪原理框架图,图2为检测原理流程图。
2 硬件电路设计2.1 DP83848以太网通信电路该电路采用以太网DP83848芯片以太网芯片,鲁棒性好、功能全、功耗低的10/100Mbps 单路物理层(PHY )器件。
支持MII 和RMII ,使设计更简单灵活;同时支持100BASE ~T 和100BASE ~T 以太网外设。
电路图如图3。
作者简介:胡志刚(1989—),男,研发工程师。
王新官(1981—),男,研发经理。
图1 原理框架图43ELECTRONIC ENGINEERING & PRODUCT WORLD 2021.3设计应用esign & ApplicationD图3 DP8348以太网通信电路3 嵌入式软件设计3.1 TC/IP数据接收与发送流程激光雷达设备内部集成TCP Socket Server ,通过TCP Socket Client 端登录方式获取数据和发送指令信息。
一种车辆轮廓尺寸参数全自动测量系统

意 测 量 车 体 表 面两 点 距 离 . 系统 的 构成 如 图 12所 示 其 中 图 1 示 的 测 量 装 置 的 正 视 图 .图 2为 侧 视 所 图。图中设备分别 为 :、 量 支架 ; 、 电开 关 ;、 1测 2光 3 摄
备和测量装 置等设备
作 者 简 介 : 晓 昀 (9 8 ) 男 , 士 , 师 , 何 17 一 , 硕 讲 系统 分析 师 , 事 领 域 为计 算机 系 统 设 计 、 从 图像 处理 方 面教 学 与研 究
。 现 计 代 算机 21. 016 0
0 引
言
了纠 纷 . 响 了政 府 部 门执 法 的公 开性 和 公 正 性 影 为 了解 决 上 述 问题 .近 年 来 也 出 现 了一 些 测 量 车 辆 尺 寸 的 装 置 , 如 : 光 三 维 扫 描 仪 , 种 基 于 激 光 例 激 这
随 着 国 民社 会 经 济 的 发 展 .带 动 汽 车 行 业 迅 猛 发
用, 自动动态测量 车长 、 车宽 、 高 、 车 轴数 、 轮距 、 距 以 轴 及车身任意位 置距 离等参数 的全 自动测量 系统 该系
统 通 过 图 片 拼 接 技 术 和 传 感 器 技 术 获 取 带 有 标 尺 的 车
率低 、 成本高 、 准确性 不高 , 检测 过程 中也不 可避 免会
置 ; 、 距 测 量 雷 达 。另 外 还 包 括 计 算 机 、 线 传 输 设 7轮 无
工测量无法 对测量 的过程 和结果进行保存 .一 旦车 主
一种新型的车辆外廓尺寸检测系统的设计
一种新型的车辆外廓尺寸检测系统的设计
周小波;朱勇
【期刊名称】《仪表技术与传感器》
【年(卷),期】2014(000)004
【摘要】汽车整车尺寸参数是汽车通过性参数及运行安全检测的重要内容,为了精确测量外廓尺寸参数,提出了一种基于激光光幕、超声波传感器、上位机控制软件等构成的新型车辆外廓尺寸检测方案.设计和调试了系统的软硬件,并搭建了检测试验线,对研发的系统进行了验证,试验结果表明:系统能够对不同车型的车辆外廓尺寸进行高精度、非接触、自动化测量,且运行稳定可靠,误差小于1%.解决了目前国内车辆检测机构对于车辆外廓尺寸的检测的主要采用手工测量而造成的劳动强度大、效率低、易出现人为误差等问题.
【总页数】4页(P102-105)
【作者】周小波;朱勇
【作者单位】阜阳师范学院物理与电子科学学院,安徽阜阳236037;阜阳师范学院物理与电子科学学院,安徽阜阳236037
【正文语种】中文
【中图分类】TB472
【相关文献】
1.基于数据融合的动车外廓尺寸检测系统的设计 [J], 陈皓;赵转萍;黄齐敏
2.货运车辆的“尺寸”限值——车辆外廓尺寸测量系统解析 [J], 冯遇春
3.基于激光扫描技术的车辆外廓尺寸动态测量系统的设计 [J], 王振华;许琳娜;苏现征
4.车辆外廓尺寸动态测量装置的设计与实现 [J], 李源波;宫清华;
5.车辆外廓尺寸自动测得值不确定度分析与评定 [J], 黄健;董宏静;孙树兵
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
250
四川省第十二届汽车行业学术年会论文
表 1 该系统机动车外廓尺寸检验报告(式样)
表 2 《机动车安全技术检验项目和方法》GB21861-2014 标准车辆外廓尺寸摘录
表
不合格项(填写编号和名
序号
不合格项目说明
备注
称)
车 辆 外 廓 尺 寸 ( mm×mm×mm ): 11652 mm×2487 mm×4006 mm 整备质量(kg):10460kg
机动车所有人:
手机电话:
地址/邮编:
检验员建议:
检验员签字:
注1:判定栏中填 “○”为合格,“╳”为不合格,“—”表示不适用于送检
车。
注2:当车辆外廓尺寸、整备质量检验项目使用仪器自动测量并打印在仪器设
备检验表格中时,本表相应参数可不填。
251
四川省第十二届汽车行业学术年会论文
3.结束语 本系统的处理方法是针对超限车辆现场检测解决的有效途径,综合应用激光
图像定
位 车 头 车 尾 位 置
车长
图 10 系统软件工作原理图
248
四川省第十二届汽车行业学术年会论文
在等待车辆进入时,测高相机组、测宽相机组和测长相机组都处于采集状态。
测宽和测高相机组采集到的图像仅用于更新背景影像,而测长相机判断是否有车
进入测量场(虚拟线圈)。当车辆进入虚拟线圈内后(图像上设定的一个范围),
245
四川省第十二届汽车行业学术年会论文
数,获得极值限界位置;然后用预先标定好的相机参数,利用立体测量计算模块 极限宽度。这里的宽度分为左宽和右宽极限位置,这两者的差值即为车宽。此外, 右宽极限位置(靠测长相机一边的)还要提供给测长相机使用。 ③测宽相机组模块:对所有图像进行直方图均衡化增强处理;判断车头和车尾刚 好到达相机视轴线的图像,然后去除头和尾部冗余图像;区域法相邻图像拼接参 数解算(先得到有变化部分);所有图像自动拼接为一个完整的车身侧面图像。用 预先标定好的参数和右宽极限位置值来计算车长。
1234
Y
背
O
景
X
板
行车截平面坐 标系
W WWW K4 3 2 1 i
地 面
图 5 多相机立体测量计算原理图
以左测宽相机组为例,图中 W1~W4 为 4 台左测宽相机,构成了左测宽相机组。 它们在行车截平面里的位置已标定得到。当车驶过后,从差分累积图像里可得到 车的左边界在图像里的位置(图中忽略了汽车后视镜的影响),如图 6 所示。
系统基本工作原理是:采用虚拟线圈技术,即在相机成像范围内,由软件虚 拟一测量区域,当有大型动态物体(车辆)进入该区域时,测量系统自动启动,此 时相机开始拍摄测量,分布在车辆顶部和侧面的成像装置连续不断获取车辆的照 片。测宽相机组根据地面标志被遮挡情况,分析左右两边的宽度值,然后得出实 时的车辆断面宽度;测高相机组根据立面标志被遮挡情况,分析高度值,得出实 时的车辆断面高度;当车辆驶出测量范围时,给出车辆的最宽、最高值;此时测 长相机组保存连续的侧面照片拼接出完整车辆侧面图象,计算出最长尺寸;从而 综合完成长度高度、宽度、长度坐标计算。当测量区域内没有大型动态物体时, 系统认为车辆已经完全驶离测量范围,测量结束。系统工作流程图 2 所示。
4006
图 12 系统软件测试界面图 249
四川省第十二届汽车行业学术年会论文
图 13 系统软件测试界面图
点击“显示图像”按钮可打开或者关闭实时影像,可用于设备检查,如 13 图 所示。点击“确定”按钮自动进入下一轮测量,直到结束程序。
2487 11652
4006
此外,系统软件能以不同颜色分别显示长、宽、高等测量线,还能自动寻找 待测范围,加入人工辅助干预功能。系统具备联网控制接口,已在多家安检机构 实现全自动无人操作检测,数据实时上传并全自动打印检测报告(如表 1 和表 2)。
给出有车的信号,那么测长相机开始保存所有有车时的图像,一直到车辆驶出虚
拟线圈位置。而测宽和测高相机组则进行实时差分和累积计算,而不用保存图像;
当得到车辆驶出信号时,各测量模块分别计算出车辆的长、宽、高值。
系统软件的工作界面分为主程序区、数值显示区、信息显示区和操作区。数
值显示区用于显示长、宽、高和图像,信息显示区用于显示数据处理过程的参数。
图 4 系统软件功能模块图
④多相机立体测量计算模块:利用多台相机非同步拍摄的方式来构成立体,其最 终所形成的立体影像是一种差分累积立体影像,即对相邻两帧影像进行差分计算, 并把差分结果进行时间积分,而得到一种累积变化影像。不同相机之间的差分累 积影像构成了立体。其具体实现原理如图 5 所示。
WWWW
246
四川省第十二届汽车行业学术年会论文
图 6 差分累积图像
再通过分析,得到边界的像素坐标(图像中红色竖线标记),并用预先标定好 的参数,得到视线与地面的交点:W1~W4。其中 Ki 为相机位置与地面交点之间连 线之间的两两交点,通过对 Ki 的分析,可以得到车外廓的左极限。车外廓的右极 限位置和车外廓高也可同理得到。
与红外信号采集、智能测量、计算机三维图像等处理技术,设计出机动车外廓尺 寸动态自动测量装置,实现了对处于行驶状态中的车辆外廓(长、宽、高和栏板 高度等)尺寸参数的自动测量。通过电脑屏幕动态显示车辆的三维外廓图像,对 影响机动车外廓尺寸的因素进行智能处理。经现场验证,测量数据与车辆的标准 数据自动比对后表明,系统所作出的评判准确,每检测一辆汽车花费时间约20~ 40秒。打破传统的人工手持钢卷尺测量方法。该技术具有很强的创新性和实用性, 应用前景将十分广阔。
…
邻两
幅图
像之
间的
拼接
参数
获得 车侧 面的 整体 拼接 参数
车侧 面全 景图 象
线程 10 求相 邻两 幅图 像之 间的 拼接 参数
标定 参数
右轮 廓位
置
车长
图 7 全自动图像拼接模块原理图
247
四川省第十二届汽车行业学术年会论文
图 8 一辆样车的图像采集
图 9 序列拼接得到的全景图像
图中粉色竖线标注了车头和车尾的位置,由车头和车尾的位置就可计算出车 辆的长度值。 2.2 系统软件的具体实现
系统软件的工作原理图 10 所示。
测高相机组
测宽相机组
测长相机组
采集 图像
处理
测高影像组
立
标
体
标
定
摄
定
参
影
参
数
测
数
量
计
车高算
采集图 像
处理
测宽影像组
立 体 摄 影 测 量 计
算车宽
车 左 限 界
立 体 摄 影 测 量 计 算 车 右标 限定 界参
数
采集图
像
无
判断是否
进有 车
测长影像组
图 像 拼 接
全景
四川省第十二届汽车行业学术年会论文
机动车外廓尺寸检测仪系统的设计与运用分析
赵伟杰 1 罗文博 2 罗法贵 2 成都华府机动车检测有限公司 2.中国测试技术研究院)
摘要:针对当前机动车外廓尺寸安全性能检测提出了新的要求,迫切要求提 高机动车安全技术检测的效率。在传统的机动车人工外观检验基础上,结合2015 年3月1日实施的国家标准GB21861-2014《机动车安全技术检测项目和方法》,对车 辆外廓尺寸参数测试仪器系统设计与运用进行了分析。该检测系统以硬件部分的 图象采集单元和软件部分的计算机网络系统为核心,具有性价比高、操作方便的 特点。通过实验测试表明:减少了车检人员工作强度,杜绝人为因素的不合理操 作,有效地协助机动车安检部门远程监控车辆检测状态,帮助安检机构更科学的 管理车辆检测状况。
工业计算
视频信号
机
测宽相 机组
测长相 机组
背 测高相 机组
显 图
示部 像
键盘
分
采
鼠人标机
集
交互
传感器部分 市电
电源线
供电部分
内部
网络交
网
换机 计算、通讯部分
图 3 系统硬件架构
图
2.系统软件设计与实现 2.1 系统软件功能模块设计 系统软件的主要工作是进行分析、整合、计算测量数据并保存至数据库。其中通 过计算机网络系统及时地验证车辆外廓数据的合法性,判断是否为改装车辆。系 统软件主要由测高相机组模块、测宽相机组模块、测长相机组模块、多相机立体 测量计算模块、图像自动拼接模块构成。系统软件的功能模块设计如图 4 所示。 各功能模块的功能介绍如下: ①测高相机组模块:得到最终的差分累积图像;对差分累积图像进行滤波和去噪 处理;获得极值限界位置;然后用预先标定好的相机参数,利用立体测量计算模 块求得极限高度。 ②测宽相机组模块:测宽相机组分为左宽和右宽两部分,它们都得到最终的差分 累积图像;对差分累积图像进行滤波和去噪处理;去除后视镜影像和校正驶偏系
243
四川省第十二届汽车行业学术年会论文
被测目 标
界面显 示
报表
相机
图像
光
采
学成
集卡
像
模拟图
像
立体
显示
摄影
器
测量
长宽高
解算
网络
打印
结果 传输
数据库
图 2 系统工作流程图