改进型卡塞格林光学系统的设计
基于某卡塞格林系统地望远物镜设计ZEMAX
工程光学课程设计报告班级:姓名:学号:成绩:指导教师:报告日期:目录摘要 (i)第一章绪论 (1)1.1课程设计题目 (1)1.2 设计要求 (1)第二章望远物镜的设计与相关参数 (2)2.1 望远物镜的主要参数 (2)2.2 望远物镜结构类型 (3)2.3 物镜的光学特性 (4)2.3 卡塞格林光学系统 (4)2.4 ZEMAX中的像质评价方法 (5)第三章设计与优化 (9)3.1设计过程 (9)3.2优化过程 (12)第四章运用Solid works对镜片进行绘制 (16)第五章新得与体会 (18)主要参考文献 (19)摘要由薄透镜组的初级像差理论入手,根据初级像差参量PW与透镜折射率n、孔径半径r、厚度d等关系,求出了满足初始设计的结构参数的透镜折射率n、孔径半径r、厚度d、形状系数Q、曲率p。
用光学设计软件ZEMAX对所求的结构参数进行了优化。
光学设计要完成的工作包括光学系统设计和光学结构设计。
所谓光学设计就是根据系统所提出的使用要求,来决定满足各种使用要求的数据,即设计出光学系统的性能参数、外形尺寸、各光组的结构等。
大体可以分为两个阶段。
第一阶段根据仪器总体的要求,从仪器的总体出发,拟定出光学系统原理图,并初步计算系统的外形尺寸,以及系统中各部分要求的光学特性等。
第二阶段是根据初步计算结果,确定每个透镜组的具体结构参数,以保证满足系统光学特性和成像要求。
这一阶段的设计成为“相差设计”,一般简称光学设计。
评价一个光学系统的好坏,一方面要看它的性能和成像质量,另一方面要系统的复杂度。
一个系统设计的好坏应该是在满足使用要求的情况下,结构设计最简单的系统。
第一章绪论1.1课程设计题目基于卡塞格林的望远物镜设计1.2 设计要求(1)入瞳直径:D=20mm;(2)相对孔径D/f’=1/6.15;(3)视场角2ω=7°;(4)在可见光波段设计(取d、F、C三种色光。
d为主波长);(5)MTF值在67lp/mm处大于0.40;(6)要求给出用ZEMAX优化减小球差和轴向色差的方法。
Zemax光学设计:一个带校正器的卡塞格林望远镜的设计实例
Zemax光学设计:一个带校正器的卡塞格林望远镜的设计实例引言:折反射系统相比于折射系统的主要优点有:1.由于光路折叠而更紧凑;2.可以做到很大口径;3.可以很好校正色差,因为大多数的光焦度在反射镜而不是在透镜上。
4.可以做到从紫外到红外非常宽的波段。
5.反射镜与透镜的佩兹瓦尔曲面的曲率相反,可以实现较平的视场。
在两反射镜系统中,次镜构成的孔径的中心拦光(Central Obscuration),这不仅会造成能量的损失,也会使MTF的低频至中频部分随着中心拦光面积的增大而显著减小。
同时,因为两反射镜系统像的位置很接近于主镜位置,所以几乎所有的主镜都需要挖一个洞。
这个洞的大小限制了最大的像面尺寸,而且洞的大小必须远小于主镜的口径。
例如,通常中心拦光或洞的大小是主镜直径的30%,即线性拦光比为0.3,有效口径减小了0.09(0.32),此时MTF的中低频端变化不明显。
一般拦光比不要大于0.3。
典型的牛顿望远物镜仅用一个抛物凹面作为主反射镜,它可以形成一个直接用眼睛看的像。
在此基础上,添加一个凸双曲面的次反射镜,就成了卡塞格林望远镜(Cassegrain Telescope)。
由于主镜和次镜都是圆锥曲面,每个面上都没有球差,但是每个面都有彗差和像散,而这限制了可用的视场角。
另外,由于两个反射镜的半径不一样,还存在场曲。
设计仿真:.1.建立一个简单的卡塞格林望远镜系统.首先输入系统特性参数,如下:在系统通用对话框中设置孔径。
在孔径类型中选择“Entrance Pupil Diameter”,并根据设计要求输入“3800”;在视场设定对话框中设置3个视场,要选择“Angle”,如下图:在波长设定对话框中,设定0.365um、0.5876um和0.850um共3个波长,如下图:查看LDE:2D Layout:查看点列图:查看Ray Fan:从点列图和Ray Fan可以看出,这个系统有明显的彗差和像散。
.2.在卡塞格林望远镜中加入像面校正器.临近焦面的双片式透镜可以校正彗差和像散。
施密特-卡塞格林系统的优化设计

施密特-卡塞格林系统的优化设计本次实验将使用到:polynomial aspheric surface, obscurations,apertures, solves, optimization, layouts, MTF plots。
本次实验是完成Schmidt-Cassegrain 及polynomial aspheric corrector plate。
这个设计是要在可见光谱中使用,需要一个10 inches的aperture 和10 inches 的back focus。
开始,先把primary corrector, System, General, 在aperture value 中键入10。
同在一个screen 把unit “Millimeters”改为“Inches”。
再把Wavelength 设为3个,分别为0.486,0.587,0.656,且0.587定为主波长。
也可以在wavelength 的screen 中按底部的select 键,选默认波长。
默认的field angle value,其值为0。
依序键入如下LED 表的相关数据,此时the primary corrector为MIRROR 球镜片。
2D图如下:现在加入第二个corrector,并且决定imagine plane 的位置。
输入如下的LDE,注意到primary corrector 的thickness 变为-18,比原先的-30小,这是因为要放second corrector 并考虑到其size 大小的因素。
在surface4 的radius 设定为variable,通过optimization, Zemax可以定下他的值。
先看看他的layout,应如下图所示。
调出merit function, reset 后,改变“Rings” option 到5。
The rings option 决定光线的sampling density(采样密度), default value 为3,此实验要求为5。
光学设计实验四卡塞格林系统设计
实验四:卡塞格林系统一.实验目的熟悉卡塞格林系统设计的原理过程,学习如何使用多项式的非球面,掌握设计系统的的方法及过程。
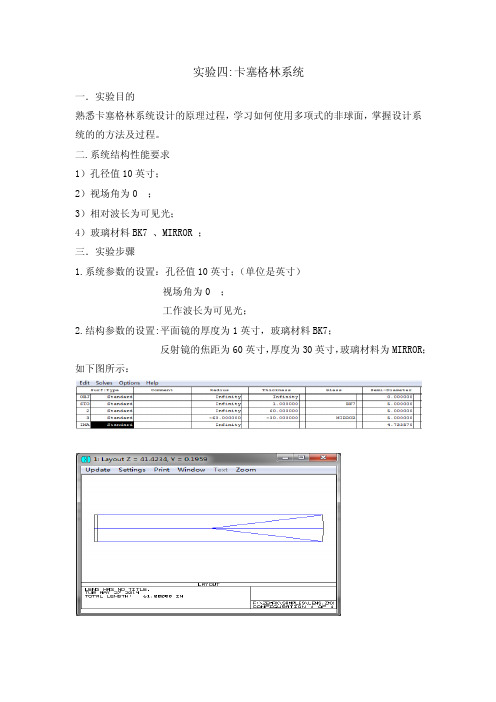
二.系统结构性能要求1)孔径值10英寸;2)视场角为0︒;3)相对波长为可见光;4)玻璃材料BK7 、MIRROR ;三.实验步骤1.系统参数的设置:孔径值10英寸;(单位是英寸)视场角为0︒;工作波长为可见光;2.结构参数的设置:平面镜的厚度为1英寸,玻璃材料BK7;反射镜的焦距为60英寸,厚度为30英寸,玻璃材料为MIRROR;如下图所示:3.加辅助镜面,并安放像平面。
让ZEMAX为辅助面计算恰当的曲率。
玻璃材料为mirror。
(注意:已将主反射面的距离减小到-18,这将使辅助镜面的尺寸减小。
像平面的距离现在是28,实际上,是在主反射面后10英寸)如下图所示:四.光学望远系统优化过程1.将三环六臂改为五环六臂(菜单栏Editors一Merit Function一Tools一Default Merit Function一Reset一Rings)如下图所示:2.设置变量,将曲率半径设为优化变量,权重设为1。
将新面(即第3面)的厚度从0改为20。
往上移一行,将第2面的厚度由60改为40。
对于主反射面来说,校正器与它的距离就是60;3,。
将光阑面(STO)的表面类型换为“EVEN ASPHERE”。
这种面型允许为非球面校正器指定多项式非球面系数。
并将第一面的“4th Order Term” 6th Order Term”和“8th Order Term”列设为变量,当前为0,如下图所示:4.打开视场角,调整设计。
从主菜单,选System,Fields,并将视场角的个数设置为3,输入y角0.0,0.35和0.7。
如下图所示:优化即可得到MTF,如下图所示:5双击第三面的第一列,从孔径类型列中选圆形“Circular Aperture”,到Min Radius中输入1.7。
这表示所有的光线穿过表面时离轴距离必须要大于1.7英寸,这就是主反射面的缺口“Hole”。
密特—卡塞格林望远镜系统

实验四施密特—卡塞格林望远镜系统(Schmidt-Cassegrain)一、实验目的1.掌握Zemax中非球面镜面的定义与输入方法2.掌握Zemax中利用非球面镜的优化像差;3.熟悉Zemax中MTF的使用。
二、实验内容1.设计一个带多项式非球面矫正器施密特—卡塞格林系统;2.优化该系统的色球差。
三、实验器材1.p c机一台2.Z emax软件3.Z emax Manual一册(英文版)四、实验过程施密特-卡塞格林望远镜是在1931年由德国光学家施密特发明的优秀广视野望远镜。
在镜筒最前端的光学元件是施密特修正板,这块板是经过研磨接近平行的非球面薄透镜,可以确实的改正与消除主镜造成的球面像差。
自从1960年代,星特朗(Celestron)公司介绍了这一型的望远镜之后,数以万计的业余天文学家已经购买和使用过施密特-卡塞格林望远镜,直径从20厘米(8英寸)到48厘米(16英寸)都有。
本次实验是设计一个带多项式非球面矫正器施密特—卡塞格林系统 (Schmidt-Cassegrain) 。
设计的使用范围为可见光谱。
我们将采用10英寸的孔径,10英寸的后焦距(从主镜的后面到焦点)。
输入数据:由于只有矫正板和主反射面,进行这个设计是比较简单的,因此我们开始时先在光阑后插入两个面。
选择“SYSTEM”,“GENERAL”,输入10作为孔径值。
在同一个屏幕上,将单位“毫米(Millimeters)”改为“英寸(Inches)”。
选择“SYSTEM”,“WAVELENGTHS”,得到“波长数据”屏幕,设置3个波长:486,587,和656,其中587为主波长。
现在,我们将使用缺省的视场角0度,在Lens Data Editor中输入数据,如下表。
光阑被放在主面曲率半径的中心,这是为了排除视场像差(如彗差),它是Schmidt设计的特点。
我们可以选择2D Layout演示一下图形以验证一切是否就绪。
现在我们将加入辅助镜面,并安放像平面。
施密特-卡塞格林望远镜的设计(一)

施密特-卡塞格林望远镜的设计(一)摘要 ZEMAX光学设计程序是一个完整的光学设计软件,包括光学设计需要的所有功能,可以在实践中对所有光学系统进行设计,优化,分析,并具有容差能力,所有这些强大的功能都直观的呈现于用户界面中。
ZEMAX功能强大,速度快,灵活方便,是一个很好的综合性程序。
ZEMAX能够模拟连续和非连续成像系统及非成像系统。
关键字:光学,模拟1.Zmax软件的介绍 ZEMAX 是一套综合性的光学设计仿真软件,它将实际光学系统的设计概念、优化、分析、公差以及报表集成在一起。
ZEMAX 不只是透镜设计软件而已,更是全功能的光学设计分析软件,具有直观、功能强大、灵活、快速、容易使用等优点,与其他软件不同的是 ZEMAX 的 CAD 转档程序都是双向的,如 IGES 、 STEP 、 SAT 等格式都可转入及转出。
而且 ZEMAX可仿真 Sequential 和 Non-Sequential 的成像系统和非成像系统, ZEMAX 当前有: SE 及 EE 两种版本。
序列性( Sequential )光线追迹大多数的成像系统都可由一组的光学表面来描述,光线按照表面的顺序进行追迹。
如相机镜头、望远镜镜头、显微镜镜头等。
ZEMAX 拥有很多优点,如光线追迹速度快、可以直接优化并进行公差计算。
ZEMAX 中的光学表面可以是反射面、折射面或绕射面,也可以创建因光学薄膜造成不同穿透率的光学面特性;表面之间的介质可以是等向性的,如玻璃或空气,也可以是任意的渐变折射率分布,折射率可以是位置、波长、温度或其它特性参数的函数。
同时也支持双折射材料,其折射率是偏振态和光线角度的函数。
在 ZEMAX 中所有描述表面的特性参数包括形状、折射、反射、折射率、渐变折射率、温度系数、穿透率和绕射阶数都可以自行定义。
非序列性( Non-Sequential )光线追迹很多重要的光学系统不能用 Sequential 光线追迹的模式描述,例如复杂的棱镜、光机、照明系统、微表面反射镜、非成像系统或任意形状的对象等,此外散射和杂散光也不能用序列性分析模式。
基于卡塞格林系统的红外制冷型长焦分档变倍光学系统的设计
第 2期
中 国光 学
C h i n e s e Op t i c s
Vo 1 . 7 No. 2
Ap r . 2 01 4
2 0 1 4年 4月
文章编 号
2 0 9 5 — 1 5 3 1 ( 2 0 1 4 ) 0 2 - 0 2 9 3 08 -
基 于 卡 塞格 林 系统 的 红外 制冷 型 长 焦 分 档 变 倍 光 学 系统 的设 计
De s i g n o f c o o l e d i n f r a r e d s wi t c h- z o o m o p t i c a l s y s t e m wi t h l o n g e fe c t i v e f o c a l l e n g t h b a s e d o n R— C s y s t e m
Ab s t r ac t:Ba s e d o n t h e R— C s y s t e m a c o o l e d i n f r a r e d s wi t h- z o o m o p t i c a l s y s t e m wi t h l o ng e f f e c t i v e f o c a l l e n g t h i s d e s i g n e d.Th e i n i t i a l pa r a me t e r s a r e c a l c ul a t e d a n d t h e c o mp o n e n t s f o c a l p o we r i s d e d u c e d.S e c o n d a r y i m。
C h i n e s e A c a d e m y f o S c i e n c e s , X i a n 7 1 0 0 6 8 , C h i n a )
卡塞格林望远物镜设计报告

卡塞格林望远物镜设计报告1. 引言卡塞格林望远物镜是一种常用于天文观测的光学系统。
本报告旨在介绍卡塞格林望远物镜的设计原理和关键参数,并给出一个实际设计案例。
2. 设计原理卡塞格林望远物镜是一种反射式望远镜,其基本原理是通过反射光学,将被观测的光线从主镜反射至副镜,再通过副镜反射至焦平面。
主要由主镜和副镜组成。
- 主镜:是卡塞格林望远物镜的核心元件,一般采用抛物面形状,其作用是将光线反射至副镜。
- 副镜:位于主镜焦点处,用于反射光线至焦平面。
副镜一般采用凹球面或椭球面形状。
3. 关键参数卡塞格林望远物镜的性能与以下关键参数密切相关:- 主镜直径:直径越大,光收集能力越强,分辨率越高。
- 主镜焦距:焦距决定物镜的放大倍数和视场大小。
- 副镜曲率半径:副镜曲率半径与主镜焦距、视场大小等参数相互关联。
- 副镜直径:副镜直径要足够大,以保证充分接收主镜反射的光线。
4. 设计案例我们以设计口径为200mm的卡塞格林望远物镜为例进行设计。
4.1 主镜设计根据经验公式,我们选择主镜直径为200mm,焦距为1000mm。
接着,我们根据主镜直径和焦距计算主镜的曲率半径。
根据抛物面公式,我们得到主镜曲率半径为2000mm。
进一步,我们可以绘制光线追迹图,校验主镜的设计是否能将光线反射到副镜。
4.2 副镜设计根据主镜焦距和视场要求,我们选择副镜焦距为200mm。
根据凹球面公式,我们可以计算出副镜的曲率半径为400mm。
我们还需要确定副镜直径,保证副镜能够接收到主镜反射的光线。
根据实际经验,我们可以将副镜直径设定为主镜直径的一半,即100mm。
4.3 光学系统检查在设计完成后,我们需要对整个卡塞格林望远物镜的光学系统进行检查。
可以通过光路追迹和MTF(调制传递函数)等方法,评估物镜的成像能力、分辨率、畸变等性能指标。
5. 结论本报告介绍了卡塞格林望远物镜的设计原理和关键参数,并给出了一个实际的设计案例。
卡塞格林望远物镜以其紧凑、高分辨率的特点,在天文观测领域得到了广泛应用。
基于卡塞格林系统的望远物镜设计

基于卡塞格林系统的望远物镜设计在望远镜的设计中,物镜是非常重要的一个组成部分。
物镜的设计好坏直接影响到望远镜的成像质量。
而卡塞格林系统是一种常见且广泛应用的望远镜设计系统,由于它能够有效减少色差和减小像差,因此被广泛应用于天文望远镜的设计中。
在进行望远物镜设计时,我们可以借助ZEMAX这个光学设计软件来进行仿真和优化。
下面介绍一下基于卡塞格林系统的望远物镜设计的一般流程。
1.确定设计目标:首先,我们需要明确望远物镜的设计目标,例如视场角、放大倍数、像差控制要求等。
这些目标将指导我们在后续的设计优化中进行权衡。
2.设定初始参数:根据设计目标,我们需要设定一些初始参数,例如物镜焦距、透镜数量、透镜曲率等。
这些参数将作为优化的初始值,通过反复迭代进行微调和优化。
3.光学系统设置:在ZEMAX中,我们可以建立光学系统模型,添加透镜元件,并设置透镜的表面特性和材料属性。
同时,还需要设定入射光源和接收面的位置和特性,以便进行成像仿真。
4.成像分析:通过ZEMAX提供的成像仿真功能,我们可以对光线经过透镜系统后的成像质量进行评估。
这包括检查像差情况、确定像散和色差等指标,以及评估成像质量。
5.优化设计:根据实际仿真结果,我们可以通过调整透镜的参数和几何形状来优化设计。
在ZEMAX中,可以通过参数化的方式对透镜的曲率、厚度等参数进行微调。
通过多次迭代优化,逐步改善成像质量。
6.结果分析:优化设计完成后,我们需要重新进行光学仿真,并对结果进行分析。
这包括观察成像质量是否满足设计要求,如视场平直度、成像质量等。
同时,还要对颜色像差进行分析,确保色差控制得到满足。
7.性能评估:在设计完成后,我们可以通过ZEMAX提供的光学分析工具对望远物镜的性能进行评估。
如成像分辨率、MTF曲线等。
通过这些评估结果,我们可以确定设计的优劣,并进行必要的改进和调整。
总结来说,基于卡塞格林系统的望远物镜设计是一个复杂而繁琐的过程。
ZEMAX作为光学设计软件,提供了强大的工具和功能,可以帮助我们进行光学仿真、优化和结果分析。
中心孔的卡塞格林系统结构

中心孔的卡塞格林系统结构说到“中心孔的卡塞格林系统结构”,嘿,这个名字听起来就有点儿像某种高科技的宇宙武器,对吧?但别担心,实际上它并不像你想象的那么神秘。
卡塞格林系统,简单来说,就是一种天文望远镜的设计。
你知道,我们通常看到的望远镜,要么是长长的一根管子,要么就是那种看起来像巨大的照相机。
可卡塞格林系统呢,它特别聪明,巧妙地利用了反射镜和透镜的组合,能让你在看天体的时候,不用费劲地调整角度,反而能看到更清晰、更详细的图像,简直是科学家和天文爱好者的福音。
这个“中心孔”是怎么回事呢?其实也不复杂。
卡塞格林系统的设计里,最有趣的地方就是它的“反射镜加透镜”组合。
它使用两个主要的反射镜,一个大一个小。
大反射镜就像望远镜的“眼睛”,负责把远处的光收集起来。
而那个小反射镜,则位于大反射镜的中心,负责把光线反射到望远镜的侧面——也就是那个我们说的“中心孔”位置。
你可能会问,为什么要弄个孔呢?这个孔有啥用呢?这个孔的作用可大了。
它就像是卡塞格林系统的“秘密武器”,能大大减少光的损失,还能让系统变得更紧凑、更高效。
为什么这么说呢?想象一下,如果没有这个孔,光线通过反射镜时可能会被浪费掉,或者受到不必要的干扰。
而有了中心孔,光线能直接通过反射镜的中间,不会被那些不必要的部分阻挡掉,效果自然就好得多。
巧妙的是,这个中心孔还让望远镜变得更加小巧和精致,不像传统的那种大而笨重的设计,放在天文台里,占地方不说,还不好搬动。
而卡塞格林系统,正好解决了这个问题,既能提供高质量的图像,又不至于让你的天文探索变得笨重难移。
这种设计的优势可能不太容易被察觉,毕竟大部分天文爱好者或普通人,最关注的可能还是望远镜能不能看到星星、能不能看到月亮上的坑坑洼洼,能不能让人拍出超级震撼的宇宙照片。
但仔细想想,卡塞格林系统的独特设计让这些一切变得更加简单、清晰,而且更高效。
你就可以想象,在使用这种望远镜的时候,你甚至不用担心那些繁琐的调试和调整,轻松对焦,清晰见远。
含衍射透镜的4 d视场卡塞格林光学系统
,
JANG i n I Hu l i
(.ntuefSaeO ta Eet ncTcn l y C agh nU i rt o c ne n e nl y h n cu 3 0 2 1 I i t o c pi l l r i ehoo , h n cu nv sy fSi c dTc o g ,C agh n10 2 st p c co g e i e a h o 2 Istt o O t Eet nc I om tn h ncu n e i o Si c a dTcn l y h ncu 3 02 .ntu po— l r i fr ai ,C agh nU i  ̄ @ f c ne n eh o g ,C a gh n10 1 ; i ef co sn o v e o 3 I tu po l t nc E gnen C a gh nU i rt o c ne n eh l y h n cu 3 0 2 .n i t o O t —Ee r i nier g, h n cu nv syf Si dTcn o ,C a gh n102 ) s t ef co s i e i e a c o g
维普资讯
2 3 第 3月 第 7年 1期 0 0O卷
.
长春 理 工大学 学报
VO1 O . NO 1 3 .
M a .2 0 0 7 r
J un lo a g h iest fS in ea d T c n lg o ra fCh n c unUnv ri o ce c n e h ooy y
i hi a e .Th e o r ci g l n e t fr ci e s ra e o e fo ts ra e ft e f s e s a e n t sp p r r e c re tn e s s wi a di a t u f e n t r n u f c o h r tln r h f v h i p a e fe hes c n el ci g mi o n t sCa s g an s se lc d a trt e o d r f t r ri hi s e r i y tm.T ss se c ud a h e e f ma i e n hi y t m o l c iv nei gng i q a i h ta p o c e ifa to i to e u lt t a p r a h s d fr ci n lmi v r4。f l fv e a d t e wa e fo ta e a in o a h fe d i y i d o iw n v r n b r t fe c il s e h o
卡塞格林系统结构设计与仿真
卡塞格林系统结构设计与仿真
王健;张美君;虞林瑶;张宇鹏;李永刚
【期刊名称】《机电工程技术》
【年(卷),期】2022(51)5
【摘要】卡塞格林系统常用于航空航天和军事装备的光电设备中。
在卡塞格林系统中,主镜面形决定了整个光学系统成像质量。
随着光电行业的发展,要求光学系统质量小,性能高,而系统的质量与刚度相互矛盾,既要降低系统质量,又要保证系统抵抗温度变化导致的面形变化。
主镜系统优化前的质量是3.6 kg,反射面RMS是
1/33λ。
使用光机热集成仿真分析的方法,分析主镜系统对温度的敏感程度。
每升高(或下降)5℃,主镜反射面RMS值变化2.5 nm。
根据分析结果优化主镜结构和主镜支撑结构,由三点支撑结构改为中心支撑结构,优化后的系统质量是3.1 kg,反射面RMS是1/35λ。
分析优化后的主镜系统对温度的敏感度,每升高(或下降)5℃,主镜反射面RMS值变化3.9 nm,这种微小变化对成像质量无影响。
实现降低系统质量和保证成像质量的目标。
【总页数】4页(P84-86)
【作者】王健;张美君;虞林瑶;张宇鹏;李永刚
【作者单位】中国科学院长春光学精密机械与物理研究所
【正文语种】中文
【中图分类】TH122
【相关文献】
1.500倍卡塞格林式太阳能聚光镜设计与仿真
2.基于卡塞格林系统的红外制冷型长焦分档变倍光学系统的设计
3.卡塞格林望远镜耦合系统锥形导管的仿真与误差分析
4.基于卡塞格林系统的激光测距接收光学系统的设计
5.卡塞格林式离轴反射系统准直仪的设计与装调方法
因版权原因,仅展示原文概要,查看原文内容请购买。
一种改进型的红外卡塞格林光学系统设计
引言
卡塞 格林 光学系 统 因为 具有无 色差 、无热 化 、结
1 对卡塞格林光学系统进行改进 的必要性
11 问题 的提 出 .
构 长度短 、特 别适于 多光谱 等特 点 ,有很重 要 的实用 价值 , 广泛应 用在 大型天文 望远 镜系统 , 外或红 外 被 紫
的光 学系 统 中l。但卡 塞格 林光学 系统 自身存 在一些 l 】 固有 的缺 陷:系统 中 的次 反射镜 将视场 中心 优质 的成
M ir r a ea e s a e i tod c d i t e d sg f Ca s g an Op i a y t m.Th e i n e a l ro nd r l y l n r n r u e n o t e i n o s e r i tc l S se h e d sg x mp e s o bi te ft mei ae s e r i h wsa l i so a lort d Ca s g a n Opt a yse b a i g fed ofv e a d r ltv p  ̄u e a e i he i lS t m e rn l i w n e ai e a e r c i r i r e r a l . n l ma equ lt n tu t r c o d wi h sg e uie n s mp ov d g e ty Fi a i g aiya d sr cu ea c r t t ede i n r q r me t . h Ke r ywo ds. Ca s g an Op i a se , M a i ir r opi a e i n se r i tc lSy tm ngn M ro , t l sg c d
7 6
第 3卷 第 2 2 期 21 0 0年 2月
基于zemax的新型折返式卡塞格林望远镜系统设计

基于zemax的新型折返式卡塞格林望远镜系统设计钱超;张金业【摘要】利用光学软件zemax优化并设计了折返式卡塞格林望远镜系统.新型卡塞格林系统主次镜采用球面反射镜,避免了使用加工困难和成本较高的非球面镜.给出了利用zemax优化设计的整个过程,并通过评价函数、点列图、光线扇面图以及光学传递函数的评价手段对设计的系统进行评价和再优化,最终得到最好成像质量的望远镜系统.【期刊名称】《湖北工业大学学报》【年(卷),期】2013(028)005【总页数】5页(P18-22)【关键词】卡塞格林;zemax;折反射系统;优化【作者】钱超;张金业【作者单位】湖北工业大学理学院,湖北武汉430068;湖北工业大学理学院,湖北武汉430068【正文语种】中文【中图分类】TN202;O43计算机技术的发展不仅使光学设计工作从繁杂性和庞大的计算工作中解放出来,而且给光学设计带来了新的活力.光学设计问题从数学角度看,就是建立和求解像差方程组[1].卡塞格林望远镜因其能在较小的结构尺寸内获得较长的焦距,所以其在天文观测以及激光雷达回波的接收领域有着广泛应用.但是由于非球面镜的加工难度及成本问题,制造一台口径大的卡塞格林式望远镜的工艺要求极其严苛,加工工艺以及非球面镜的质量将直接影响望远镜的成像质量.相比较而言球面镜的加工则相对容易得多,再加上校正透镜来校正球面镜在非傍轴区产生的像差,则可大大降低卡式系统的加工难度和加工成本.1 卡塞格林望远镜基本结构和工作原理反射式望远镜通常由主镜和次镜构成,卡塞格林望远镜也不例外.其主镜为抛物面的凹面反射镜,次镜为双曲面的凸面反射镜.主镜抛物面的焦点与次镜双曲面的左焦点重合,这样入射的平行光将汇聚在双曲面的另一焦点处.这种类型的望远镜系统在后来的许多领域都有过广泛的应用[2].随着科技的发展,卡式系统的结构不断得到改进,随之出现加施密特校正板的卡塞格林望远镜、Maksutov卡塞格林望远镜等带有折射元件的卡塞格林望远镜,以增大视场.这种类型的望远镜后来被定义为折反射光学系统望远镜.2 基于Zemax的设计2.1 初始结构在设计之初只要给出系统的筒长和像面位置,主次面的曲率半径只需给出大致的值,系统最前面的平板玻璃是折射元件的雏形.在需要加入透镜时,只要改变平板玻璃两个面的曲率半径即可,由几何光学的知识可知,它不会影响系统的像差及色差.这块平板玻璃还有另一个作用:在设计之初,它并不产生像差,所有的像差均由主次镜的球面镜产生;在改变其两个面的曲率半径即加入校正透镜后,通过观察评价图表可以看出其像差的明显变化,这些变化就是由于透镜校正了部分像差.所以通过加入这块平板玻璃可方便对比系统前后的成像质量变化.系统的初始结构如图1所示.图 1 系统的结构示意图,cm2.2 默认评价函数的创建将主次镜的曲率半径设为变量后,创建默认评价函数(图2).图 2 镜头编辑器在上述镜头编辑器中,Radius表示曲面的曲率半径;thickness表示此面与下一面的距离;glass表示玻璃的类型,玻璃平板采用BK7(nf=1.52238,nd=1.51680,nc=1.51432)玻璃,图3的Default Merit Function(默认评价函数)对话框由四组选项构成:Optimization Function and Reference(优化函数和参考点)、PupilIntergration Method(人瞳积分式),Thickness Boundary Values(厚度间隔边界条件)和评价函数其它辅助选项.默认评价函数通过使用4个基本选择:优化类型、像差类型、像差计算参考点和入瞳积分方式来构建.图 3 创建默认评价函数在Optimization Function Reference(优化函数和参考点)一项中,RMS为默认的优化类型,表示评价函数由像差的均方根偏差组成;wavefront表示采用的像差类型为波像差,其单位为λ;Centroid表示像差计算的参考点为弥散斑的质心.ZEMAX中像差值计算是追迹视场中代表物点发出若干条光线实现的,ZEMAX提供了两种光线通过人瞳的分布形式:高斯积分(Gaussian Quadrature)法和矩阵(Rectangular Array)法.GQ法中通过设定轴对称入瞳面上划分的环带数(Rings)以及沿每个环上的半径臂数 (Arms ),确定每个视场和每种波长将被追迹的光线; RA 法中则通过设定入瞳面上的网格(Grid ),对轴对称的入瞳按照正方形进行各种密度的抽样,确定每个视场和每种波长将被追迹的光线.如果网格上的光线落在入瞳之外,那么这条光线将被自动省略,因此实际使用的光线要比Grid的乘积少(图4).在上面的两种算法中,GQ算法在所有实际意义的算法中具有很大的优势,它比其他方法精确并且所需要追迹的光线较少,计算速度较快,并且具有中心对称的特性,有利于减少所需要追迹的光线[1].图 4 两种光线的入瞳分布方式第三栏为厚度边界值设定,用于设定评价函数中对空气间隔和(或)玻璃厚度的边界约束.第四栏为其他辅助选项,通常勾选中其中的Assume Axial Symmetry(假设轴对称)一项,这样在构造和计算评价函数时,默认评价函数将认为光学系统是左右对称和旋转对称的,此时更少的光线将被追迹,优化速度快而不降低精度.若在设计非旋转对称系统时,此项可不选.Ignore Lateral Color(忽略垂轴色差)复选框默认条件下不予选择.Start At(起始为序)用来设定Merit FunctionEditor(默认函数编辑器)中加入默认评价函数的操作符的起始行序.Overall Weight(全部权重)文本框:默认值为1,表示构建默认评价函数时,操作符原默认权重和权重.设置好所有的约束条件后,点击OK生成图5的MFE(默认评价函数编辑器).第一列为操作数序号.第二列为操作数类型:MNCG、MXCG、MNEG、MXEG操作符用来约束玻璃的边界条件;OPDX用来指定Wave,(Hx,Hy),(Px,Py)光线相对于一个移动和倾斜的球面的光程差.该球面可以使RMS波前差最小化,ZEMAX 用质心作为参考.默认评价函数创建后调用优化,优化后系统的评价函数的值为0.0746.此值越小表示系统的性能越好(图6).图6中:“Automatic”表示自动执行优化循环,直到系统优化不再有明显改善为止;“1 Cycle、5Cycle、10 Cycle、50 Cycle”分别表示执行1、5、10和50次优化循环;“Inf. Cycle”表示执行无限次循环,直到按下“Terminate”按钮为止;“Terminate”表示终止循环;“#CPU’s”表示分配运算的cpu核心数;“Algorithm”表示在下拉菜单中可选择合适的优化算法;“Variable”表示“设定的变量个数”.图 5 默认评价函数图 6 优化操作图优化完成之后,可以通过点列图来查看初步优化后系统的成像质量如何.在理想光学系统中,经入瞳的平行光线会汇聚在像面的某点处,但在实际的成像过程中,由于球差、色差等因素的存在,经入瞳的平行光线并不能严格汇聚在像面的某点处,而是在此点处形成一个弥散斑,理论上该弥散斑的半径越小越好.在zemax中有两种对弥散斑半径的描述,它们分别是RMS Radius(均方根半径)、GEORadius(几何半径).前者是追迹每条光线到达像面后的坐标平方和然后再除以点的数量后再开方的值,这个值能近似反映弥散斑的质量;后者则表示弥散斑的最大半径.光线经球面镜反射后形成的弥散斑,主要还和球面镜几何性质有关.抛物线、椭圆以及双曲线都是有焦点一说的:从抛物线凹的一面入射的平行光经抛物面反射后会汇聚在其焦点处;从椭圆一焦点发出的发散光镜椭圆面反射后会汇聚在另一焦点处;汇聚到双曲线一焦点处的光线经双曲面反射后会汇聚到另一焦点处.虽然圆却没有这种性质,但是在几何光学中可近似地认为:在傍轴条件下,其焦点在圆心与曲面顶点的中心处.这可以由物像公式[3]得出1l'+ 1l= 2f,l'=∞,所以l=r2.但这仅仅在傍轴条件下才成立,对于望远镜这种大孔径系统来说很难做到.由于系统主要采用反射镜设计,而且平板玻璃不产生任何单色像差和色差,所以此时的系统是没有色差的,这在图7中得到了充分的体现,因为 F、D、C三种颜色的弥散斑是严格重合的.但是点列图的中心结构是放射状的,这说明此时系统存在着离焦,这样较大的弥散斑直径就不可避免了.图 7 点列图在实际的成像过程中,无穷远处的光线并不是严格的汇聚在某一点的,所以对整个入瞳而言,球面镜的球差是不可消除的.在点列图中RMS Radius 为13.76 μm;GEO Radius 为24.131 μm,这两个半径均可以通过引入校正透镜来降低.2.3 优化后成像质量评价初步的优化完成后,为了使系统的性能得到更大的提升,还需要对其进行更进一步的优化.在初步的优化中只引入了两个变量,即主次镜的曲率半径,这一步仅仅通过控制这两个量来减小像面上球差.现在要将透镜引入,并同时控制主次面的曲率半径,透镜的引入只要将之前的平板玻璃的两个面设为变量即可.按照上面的步骤创建默认评价函数并运行优化之后的LDE(镜头数据编辑器)如图8所示.图 8 镜头编辑器从图9中可以看到,此时系统的评价函数下降到0.000 34.评价函数的下降表示透镜的引入对成像质量有了较为明显的改善.图 9 优化操作图系统的2D结构图如图10所示.图10 系统的2D模型2.4 系统的图表分析系统的结构设计及优化已经基本完成,接下来要用zemax给出的分析图表判断所设计系统的成像优劣.主要通过点列图(SPOT DIAGRAM)、光线扇面图(RAY FAN)、光程差图(OPD)以及MTF函数来分析.图11 点列图与图7相比,因为引入了透射元件,所以色差被引入,点列图的半径有所下降.RMS RADIUS从0.436下降到0.256;GEO RADIUS从0.977下降到0.549.这两个半径都不超过1 μm ,所以此时的色差相对而言也是很小的.点列图中心的放射状结构消失,大部分光线都集中在点列图中央,可以认为此时离焦的情况已基本消除.图12给出了视场角为0°时的横向球差曲线.横坐标表示系统的入瞳,纵坐标为横向球差的值.从图中可以得出系统横向球差与入瞳半径的关系,原点附近曲线的斜率还可以反映系统的离焦情况.此时纵坐标的最大横向球差为1 μm,总体球差都控制在0.5 μm之内;代表F、D、C三种色光的曲线彼此之间离得很近,这说明色差是很小的;原点附近的曲率也可以证实上面点列图的判断结果.图12 光线扇面图图13 光程差图图13给出了系统的光程差曲线,它表示不同入瞳高度的光线经过系统后到达像面时的光程与主光线的光程之差.根据瑞利判据,当最大光程差小于波长的1/4可以认为是理想成像[4].此时图中纵坐标的最大光程差下降到0.01个波长,远小于瑞利判据的0.25个波长.3 最终系统设计结构最后为了模拟次镜对光线的遮挡,在系统第一面与主镜之间加入一个半径与次镜相同的辅助镜面,并在主镜中心开一个半径为0.5 cm的圆孔以便让光线通过并与后方的目视系统衔接.最终的系统结构如图14所示.图14 最终系统的2D及3D模型由于遮拦面的加入,MTF曲线在中频部分有所下降.图15中,当MTF的值为0.1时,最大分辨率为229线对/mm.MTF曲线的低频反映轮廓,中频反映层次,高频反映细节.在60线对/mm处,MTF的值为0.4,此时系统能准确的反映出物体的轮廓,但是细节反映较差.图15 MTF曲线上面的各项图表都是在视场角为0°的情况下得出的.从图16中可以看出系统的视场角非常小的,虽然视场角的变化不大,但是MTF曲线的下降非常明显,成像质量也随之下降.这说明,系统的视场角依然非常小.小视场是卡塞格林望远镜的缺点之一,虽然本设计中的卡式望远镜的主次镜都采用球面镜,并且通过透镜校正了球面镜的球差,这虽然降低了成本和加工难度,但是系统的视场并没有因此而变大.图16 视场角分别为0°、0.3°、0.5°时的MTF曲线4 结束语采用球面镜的卡塞格林系统,降低了系统镜面的加工难度和加工成本,并且利用透射元件校正了两球面镜的固有球差.在视场角为0°时,从各项分析图表来看,该系统具有较好的成像质量,但是当视场角变化很小时,成像质量便有了较严重的恶化,该缺点可以通过增加更复杂的前置透镜组和后置透镜组来解决,这是以后工作中所要解决的问题.[ 参考文献 ][1] 迟泽英,陈文建.应用光学与光学设计基础[M].南京:东南大学出版社,2008:467-501.[2] 潘君骅.一个新的泛卡塞格林望远镜系统[D].江苏:苏州大学图书馆,2007.[3] 张以谟.应用光学[M].北京:电子工业出版社,2008:345-360.[4] 刘钧,高明.光学设计[M].北京:国防工业出版社,2012:10-95.。
改进型卡塞格林光学系统的设计

改进型卡塞格林光学系统的设计张磊;刘智颖;胡源;高天元【摘要】普通的卡塞格林光学系统,其主次镜分别由抛物面和双曲面组合而成,非球面镜的加工难度大、成本高,针对这些特点对卡塞格林光学系统进行了改进.改进型的卡塞格林光学系统与传统的卡塞格林光学系统对比具有加工难度小、成本低等特点,通过在系统最前面附加前校正组,使得主次镜可以由球面面型实现,通过在像面前设置后校正组使视场也得到了提高,与传统的卡塞格林光学系统20'相比,它的视场可以拓宽到1.3°.系统设计结果通过传递函数与点列图的分析与衍射极限非常接近,为中等口径卡塞格林光学系统的设计提供了一个新的思考方法.%The traditional cassegrain system is generally composed of the parabolic primary mirror and the hyperbolic secondary mirror. The difficulty and cost of the manufacturing of the aspherical surface is very high. And the image quality is easy to be effected by the manufacture error and environment variation. Based on these characteristic, the improved cassegrain system is designed with preference of lower difficulty and cost manufacturing. The primary mirror and the secondary mirror are both spherical surface instead of the aspherical surface. The image quality is analyzed related to not only the optical component radius, thickness and the material but also secondary mirror central obscuration. The central obscuration ratio is chose reasonably based on the theory of annular diffraction. The field of view of the improved cassegrain system is enlarged from 20' to 1.3°. It is shown that the system assessed by optical transfer function and spot diagram is much closed to the diffraction limit. The successful improved cassegrainsystem design is demonstrated. It provides meaningful view for reflected optical system design.【期刊名称】《长春理工大学学报(自然科学版)》【年(卷),期】2011(034)004【总页数】3页(P30-32)【关键词】改进型卡塞格林光学系统;球面;遮拦比;视场;传递函数【作者】张磊;刘智颖;胡源;高天元【作者单位】长春理工大学光电工程学院,长春130022;长春理工大学光电工程学院,长春130022;长春理工大学光电工程学院,长春130022;长春理工大学光电工程学院,长春130022【正文语种】中文【中图分类】TH706随着空间光通信的发展对其所使用的光学系统的分辨率也提出了更高的要求,所使用的光学系统主要有卡塞格林、格里高利和牛顿式系统等,其中应用最广泛的就是卡塞格林光学系统。
改进型卡塞格林望远光学系统的优化设计
YUAH in a F Yue a g‘GUO u 。NI Ja n n , U gn , 3 n , NG Che g n da
( . h t ee t eE g n ei gI si t ・ h n o u 1 P oo lor i n ie r n n t u e C a g h nUn v ri f oe e n e h o o y Ch n o u 3 0 2 t ie s yo S in ea dT c n lg , a g h n 1 0 2 ; t
第3 卷 第3 3 期
2 l 年9 O O 月
=:= —: := == 一 — 一 :=一 一 … 一 =. =t .一 == :一 ==一
长春理 工大 学学 报 ( R然科 学版 )
Ju If h 。u n sy f c n n T on18 ( tr c n。.io ) oma。 C  ̄ghnU i i 。 Si ∞ad oho。y NM aS i 0 k/in V t o u l c kt
2 Orn n eE gn eigDe at n , r oc va o iest Chn o u 3 0 2 . d a o n ier p r n me tAiF reA it nUnv ri i y, a g h n1 0 2 )
Ab t a t P r c lr sr c : at u al i y,t es l l h s ms t n c le g . h is r t na ay e e d a t g s n h r- h mal i t y t h l gf a ln t T eds e t i n l z d t v n a e dS o t - g s e wi o o h ao h a a
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收稿日期:2011-09-12基金项目:国家863计划项目资助作者简介:张磊(1981-),男,博士,讲师,主要从事光学设计、光电设计、光电检测及光通信等研究,E-mail :zhangl@ 。
长春理工大学学报(自然科学版)Journal of Changchun University of Science and Technology (Natural Science Edition )第34卷第4期2011年12月Vol.34No.4Dec.2011改进型卡塞格林光学系统的设计张磊,刘智颖,胡源,高天元(长春理工大学光电工程学院,长春130022)摘要:普通的卡塞格林光学系统,其主次镜分别由抛物面和双曲面组合而成,非球面镜的加工难度大、成本高,针对这些特点对卡塞格林光学系统进行了改进。
改进型的卡塞格林光学系统与传统的卡塞格林光学系统对比具有加工难度小、成本低等特点,通过在系统最前面附加前校正组,使得主次镜可以由球面面型实现,通过在像面前设置后校正组使视场也得到了提高,与传统的卡塞格林光学系统20'相比,它的视场可以拓宽到1.3°。
系统设计结果通过传递函数与点列图的分析与衍射极限非常接近,为中等口径卡塞格林光学系统的设计提供了一个新的思考方法。
关键词:改进型卡塞格林光学系统;球面;遮拦比;视场;传递函数中图分类号:TH706文献标识码:A文章编号:1672-9870(2011)04-0030-03Improved Design of Cassegrain Optical SystemZHANG Lei ,LIU Zhiying ,HU Yuan ,GAO Tianyuan(School of Opto-electronic Engineering ,Changchun University of Science and Technology ,Changchun ,130022)Abstract :The traditional cassegrain system is generally composed of the parabolic primary mirror and the hyperbolic secondary mirror.The difficulty and cost of the manufacturing of the aspherical surface is very high.And the image quality is easy to be effected by the manufacture error and environment variation.Based on these characteristic ,the im-proved cassegrain system is designed with preference of lower difficulty and cost manufacturing.The primary mirror and the secondary mirror are both spherical surface instead of the aspherical surface.The image quality is analyzed related to not only the optical component radius ,thickness and the material but also secondary mirror central obscuration.The central obscuration ratio is chose reasonably based on the theory of annular diffraction.The field of view of the im-proved cassegrain system is enlarged from 20'to 1.3°.It is shown that the system assessed by optical transfer function and spot diagram is much closed to the diffraction limit.The successful improved cassegrain system design is demon-strated.It provides meaningful view for reflected optical system design.Key words :improved cassegrain system ;spherical surface ;obscuration ratio ;field of view ;optical transfer function随着空间光通信的发展对其所使用的光学系统的分辨率也提出了更高的要求,所使用的光学系统主要有卡塞格林、格里高利和牛顿式系统等,其中应用最广泛的就是卡塞格林光学系统。
传统的卡塞格林光学系统属于反射式系统,没有色差,口径可以做得较大,尽可能接收多的能量。
从消除像差的角度上看,卡塞格林光学系统可以在减少光学元件个数的同时消除球差,其系统具有体积小、重量轻、结构紧凑等特点。
传统的卡塞格林光学系统虽然具有上述优点,也同时存在一些弊端,其缺点之一是其主镜和次镜都是非球面,其制造比球面困难得多;其缺点之二是没有满足正弦条件,像质优良的视场太小,当视场增大时,其轴外像差也会加大,为此,Ritchey 和Cretien 提出了所谓R-C 系统,但是R-C 系统的视场也不过20′左右是比较好的。
对于实验室中的平行光管设计可以,但是这对于空间光通信的系第四期张磊,等:改进型卡塞格光学系统的设计统来讲是非常不利的。
1传统的卡塞格林光学系统经典的卡塞格林光学系统是最广泛的两镜系统之一,只消除球差,主镜为凹的抛物面,次镜为了将主镜焦距放大所以是凸的双曲面。
该类系统所产生的彗差为定值,其与视场与系统的相对孔径关系如下:δ′g=316A2θf′(1)A—相对孔径;θ—半视场角;f′;—系统焦距。
图1传统的卡塞格林光学系统Fig.1Traditional cassagrain optical system2改进型卡塞格林光学系统结构形式改进型卡塞格林光学系统分为三种结构形式。
第一种为附加前校正组,即在前面附加两片球面透镜,可以对与孔径有关的球差进行校正,从而可以实现将主次镜由球面镜代替,此种结构形式适用于口径中等的光学系统。
第二种为附加后校正组,即在像面前附加后校正组可以对场曲与像散等像差进行平衡,从而实现光学系统视场的扩大,此种结构形式可以适用于口径较大的光学系统,后校正组可以在像面前位置与主次镜之间位置进行相应的调整,从而适应不同应用场合的结构要求。
第三种为同时在前后均附加校正组的结构形式,可以实现在主次镜均为球面面型的前提下增大所能承担的视场,此种结构形式适用于口径中等的光学系统。
第三种结构形式的光学系统见图2所示。
图2改进型卡塞格林光学系统图Fig.2Improved cassagrain optical system3改进型卡塞格林光学系统分析设计过程以第三种结构形式为例进行分析。
以前报道的附加后校正组的结构形式视场达到0.8°,本文改进设计的系统视场增大到了1.3°,而且像质仍然与衍射极限非常接近。
为了避免问题的片面化。
分别针对F=3,F=10两种情形进行了设计与分析,传递函数曲线均接近衍射极限。
在该系统中只存在球面镜,从而大大地降低了加工的难度与成本。
可以在任意的光学车间均可完成对其的加工。
在设计过程中综合考虑次镜遮拦所造成的像质影响,对像质进行了更加实际的评价。
在F=3与F=10两种光学系统中次镜的遮拦比分别达到37%与31.4%。
光学系统的评价结果具体见图3~8。
由于受到遮拦比的环形衍射的影响,F= 3光学系统传递函数在100lp/mm处由0.71降到0.58;F=10光学系统传递函数在100lp/mm由0.42降到0.32。
可以看出中心遮拦对光学系统的传递函图3F=3不考虑次镜遮拦影响的光学传递函数Fig3.MTF Without considering the effect of obscuration for F=3图4F=3考虑次镜遮拦影响的光学传递函数Fig.4MTF with considering theeffect of obscuration for F=3图5F=3点列图Fig.5Spot Diagram for F=331长春理工大学学报(自然科学版)2011年数影响还是较大的,所以在设计过程中需要综合考虑其对像质产生的影响,从而对中心遮拦进行合理的选择。
由图3~图8可以看出综合这些因素,改进光学系统的传递函数和点列图均与衍射极限非常接近,达到了很好的设计效果。
4结论本文在经典的反射式卡塞格林光学系统的基础上提出了三种改进型结构形式,分别适用于不同口径场合。
可以分别实现将非球面改为球面镜代替,降低加工的难度与成本,增大所能承担的视场等优点。
通过对改进型的光学系统的分析,可以看出改进后光学系统的像质与衍射极限非常接近。
参考文献[1]张玉侠,艾勇.基于空间光通信卡塞格林天线弊端的探讨[J ].红外与激光工程,2005,34(5):560-563.[2]潘君骅.光学非球面的设计、加工与检验[M ].苏州大学出版社,2004:22-26.[3]王治乐,张伟,龙夫年.衍射受限光学合成孔径成像系统像质评价[J ].光学学报,2005,25(1):35-39.[4]Stamnes J J.Heier H ,Ljunggren S.Encircled energyfor systems with centrally obscured circularpupils.Applied Optics ,1982,21(9):1628-1633.[5]刘铁安.合理地选取双反射光学系统的遮拦比[J ].红外与激光工程,1997,26(1):45-50.[6]刘智颖.基于环形衍射理论的反射式光学系统研[J ].光子学报,2009,38(9):2265-2269.[7]康玉思.Cook 结构补偿镜的球面折反型望远系统[J ].光学精密工程,2007,15(3):303-307.[8]袁健男,付跃刚,郭俊,等.改进型卡塞格林望远光学系统的优化设计[J ].长春理工大学学报:自然科学版,2010,33(3):8-10.图6F=10不考虑次镜遮拦影响的光学传递函数Fig.6MTF without considering theeffect of obscuration for F=10图7F=10考虑次镜遮拦影响的光学传递函数Fig.7MTF with considering the effectof obscuration for F=10图8F=10点列图Fig.8Spot diagram for F=10(上接第39页)5结论修改后的彩虹编码,能够较好地适应红外测量图像的灰度分布特性。